Область техники
Варианты осуществления настоящего изобретения относятся к области техники системы управления для гибридного транспортного средства, содержащего двигатель и электромотор в качестве первичного движителя и, в частности, к системе управления для управления движущей силой или ускорением гибридного транспортного средства, имеющего трансмиссию с зубчатой передачей, когда требуемая движущая сила увеличивается, другими словами, при ускорении гибридного транспортного средства.
Уровень техники
В патенте Японии № 3707258 описано устройство управления для транспортного средства с приводом на четыре колеса, в котором первичный движитель включает в себя двигатель и электромотор, и в котором выходной крутящий момент двигателя доставляется на ведущие колеса через трансмиссию. В транспортном средстве этого вида, выходной крутящий момент двигателя доставляется на ведущие колеса при умножении или уменьшении согласно передаточному отношению, заданному в трансмиссии. Таким образом, движущий крутящий момент, извлекаемый из выходного крутящего момента двигателя, уменьшается с уменьшением передаточного отношения трансмиссии. Согласно идеям патента Японии № 3707258, в силу этого вспомогательный крутящий момент электромотора увеличивается с уменьшением передаточного отношения, чтобы помогать движущему крутящему моменту.
В публикации JP 2017-48916 А описан способ для выполнения сенсорного теста ускорения. В сенсорном тесте, раскрытом в JP 2017-48916 А, период невосприимчивости до тех пор, пока водитель не ощущает изменение ускорения и интенсивности стимулирования, вычисленной на основе изменения ускорения и рывка, используется в качестве параметров. Согласно идеям JP 2017-48916 А, если период невосприимчивости меньше верхнего предельного значения и больше нижнего предельного значения, количественный показатель оценки ускорения повышается с увеличением интенсивности стимулирования и с уменьшением периода невосприимчивости.
Устройство управления, раскрытое в патенте Японии № 3707258, выполнено с возможностью управлять вспомогательным крутящим моментом электромотора с возможностью достигать требуемого ускорения. Тем не менее, выходной крутящий момент электромотора может ограничиваться в зависимости от условия, и в силу этого ускорение не всегда может удовлетворять требуемому ускорению водителя. Например, когда педаль акселератора дополнительно нажимается во время движения в режиме оптимального регулирования скорости на предварительно определенной скорости, электромотор должен формировать крутящий момент на высокой частоте вращения, чтобы помогать крутящему моменту. В этом случае, поскольку скорость транспортного средства повышена до определенного уровня, нагрузка от дороги также увеличена, и крутящий момент электромотора уменьшается с увеличением скорости. По этим причинам, электромотор может не формировать крутящий момент в достаточной степени. Аналогично, электромотор может не формировать крутящий момент в достаточной степени, если аккумулятору не разрешается подавать электрическую мощность в достаточной степени в электромотор. Помимо этого, если инерционный момент прикладывается к двигателю для того, чтобы уменьшать уровень шума и вибрацию на низкой скорости, увеличение частоты вращения двигателя или частоты вращения трансмиссии, соединенной с выходным валом двигателя, может задерживаться. В этом случае, требуемое водителем ускорение также может не удовлетворяться.
Как описано выше, согласно идеям JP 2017-48916 А, оценка ускорения выполняется на основе увеличения ускорения и интенсивности стимулирования до тех пор, пока водитель не начнет ощущать ускорение. Тем не менее, технология для того, чтобы улучшать ощущение ускорения или оценку ускорения, неизвестна в традиционной области техники. По меньшей мере, в патенте Японии № 3707258 и публикации JP 2017-48916 А не описана технология для того, чтобы улучшать ощущение ускорения или оценку ускорения, когда вспомогательный крутящий момент электромотора для того, чтобы увеличивать ускорение, ограничивается.
Сущность изобретения
Аспекты вариантов осуществления настоящего изобретения задуманы с учетом вышеприведенных технических проблем, и в силу этого цель настоящего изобретения заключается в том, чтобы предоставлять систему управления для гибридного транспортного средства, выполненную с возможностью улучшать ощущение ускорения или повышать ускорение, даже если крутящий момент электромотора для помощи движущей силе является недостаточным.
Система управления согласно варианту осуществления настоящего изобретения применяется к гибридному транспортному средству, в котором двигатель и первый электромотор соединяются с входной стороной автоматической трансмиссии, и второй электромотор соединяется с ведущими колесами. Система управления содержит контроллер, который управляет первым электромотором и вторым электромотором. Чтобы достигать вышеописанной цели, согласно варианту осуществления настоящего изобретения, контроллер выполнен с возможностью выполнять избирательное управление, чтобы избирательно выполнять первое управление помощью, чтобы повышать входную частоту вращения для автоматической трансмиссии посредством первого электромотора, и второе управление помощью, чтобы увеличивать выходной крутящий момент второго электромотора, за счет этого увеличивая движущую силу, чтобы приводить в движение гибридное транспортное средство, на основе требуемой движущей силы.
В неограничивающем варианте осуществления, контроллер может быть дополнительно выполнен с возможностью: выполнять определение требуемого ускорения, чтобы определять то, намеревается или нет водитель ускорять гибридное транспортное средство; выполнять определение движущей силы на предмет того, является или нет выходной крутящий момент, который может формироваться посредством второго электромотора, недостаточным для того, чтобы достигать требуемой движущей силы, чтобы ускорять гибридное транспортное средство после выполнения определения требуемого ускорения; выбирать первое управление помощью, когда выходной крутящий момент, который может формироваться посредством второго электромотора, является недостаточным для того, чтобы достигать требуемой движущей силы; и выбирать второе управление помощью, когда второму электромотору разрешается формировать выходной крутящий момент для того, чтобы достигать требуемой движущей силы.
В неограничивающем варианте осуществления, определение требуемого ускорения может выполняться на основе увеличения требуемой движущей силы и удовлетворения для выполнения переключения передач "вниз" автоматической трансмиссии. Первое управление помощью может выполняться, чтобы способствовать выполнению переключения передач "вниз" посредством повышения входной частоты вращения посредством первого электромотора.
В неограничивающем варианте осуществления, определение движущей силы может выполняться на основе того факта, что скорость гибридного транспортного средства выше опорной скорости.
В неограничивающем варианте осуществления, определение движущей силы может включать в себя определение того, выше или нет скорость гибридного транспортного средства опорной скорости, и того, является или нет требуемая движущая сила постоянной для того, обеспечивать движение в режиме оптимального регулирования скорости гибридного транспортного средства непосредственно перед тем, как ускорение запрашивается.
В неограничивающем варианте осуществления, система управления дополнительно может содержать устройство накопления электричества, которое подает электричество в первый электромотор и второй электромотор. Определение движущей силы может включать в себя определение того, ниже или нет уровень заряда устройства накопления электричества уровня, на котором второму электромотору разрешается вырабатывать требуемую мощность, чтобы выполнять второе управление помощью.
В неограничивающем варианте осуществления, контроллер может быть дополнительно выполнен с возможностью запрещать выполнение второго управления помощью посредством второго электромотора во время выполнения первого управления помощью посредством первого электромотора.
В неограничивающем варианте осуществления, контроллер может быть дополнительно выполнен с возможностью запрещать выполнение второго управления помощью посредством второго электромотора во время выполнения первого управления помощью посредством первого электромотора.
В неограничивающем варианте осуществления, контроллер может быть дополнительно выполнен с возможностью: определять то, представляет собой переключение передач "вниз", которое должно выполняться в ответ на увеличение требуемого ускорения, или нет пошаговое переключение передач для того, чтобы переключать ступень зубчатой передачи автоматической трансмиссии на целевую ступень, которая находится на две или более ступеней ниже текущей ступени, через промежуточную ступень; выполнять первое управление помощью, чтобы способствовать выполнению переключения передач "вниз" посредством повышения входной частоты вращения для автоматической трансмиссии посредством первого электромотора до завершения переключения передач "вниз", если определяется выполнение пошагового переключения передач; и выполнять второе управление помощью, чтобы приводить в действие второй электромотор при переключении ступени зубчатой передачи с промежуточной ступени на целевую ступень.
В неограничивающем варианте осуществления, гибридное транспортное средство может содержать передние колеса, с которыми соединяется второй электромотор, задние колеса, на которые доставляется крутящий момент из автоматической трансмиссии, и раздаточную коробку, которая доставляет крутящий момент, доставленный из автоматической трансмиссии, на передние колеса. Второй электромотор может соединяться с раздаточной коробкой.
Таким образом, согласно варианту осуществления настоящего изобретения, первое управление помощью, чтобы повышать входную частоту вращения для трансмиссии посредством первого электромотора, и второе управление помощью, чтобы увеличивать выходной крутящий момент второго электромотора, выполняется избирательно в зависимости от требуемой движущей силы. В частности, когда водитель намеревается ускорять транспортное средство, и выполняется любое из первого управления помощью и второго управления помощью, контроллер определяет то, является или нет крутящий момент, который может формироваться посредством второго электромотора, недостаточным для того, чтобы достигать требуемой движущей силы, чтобы ускорять транспортное средство. Если второму электромотору разрешается формировать крутящий момент, достаточный для того, чтобы достигать требуемой движущей силы, второе управление помощью выполняется для того, чтобы увеличивать выходной крутящий момент второго электромотора. Следовательно, гибридное транспортное средство ускоряется в достаточной степени для того, чтобы улучшать ощущение ускорения. В отличие от этого, если выходной крутящий момент второго электромотора является недостаточным для того, чтобы достигать требуемой движущей силы, чтобы ускорять транспортное средство, первое управление помощью выполняется для того, чтобы повышать входную частоту вращения трансмиссии посредством первого электромотора. В этом случае, движущая сила не должна увеличиваться, даже если первый электромотор формирует крутящий момент или увеличивает выходной крутящий момент. Тем не менее, выполнение переключения передач "вниз" стимулируется таким образом, что передаточное отношение трансмиссии увеличивается раньше. Следовательно, движущая сила, а также ускорение увеличиваются быстро. Таким образом, период плато ускорения может уменьшаться. По этой причине, гибридное транспортное средство может ускоряться в достаточной степени, и ощущение ускорения может быть улучшено.
Например, когда гибридное транспортное средство движется в режиме оптимального регулирования скорости на скорости выше опорной скорости, второму электромотору может не разрешаться формировать крутящий момент в достаточной степени для того, чтобы ускорять гибридное транспортное средство. В этой ситуации, второй электромотор уже работает с возможностью формировать крутящий момент на определенной скорости, и нагрузка от дороги является большой. Следовательно, затруднительно ускорять гибридное транспортное средство посредством выполнения второго управления помощью. В силу этого в этой ситуации, управление помощью за счет переключения передач выполняется вместо второго управления помощью, с тем чтобы способствовать выполнению переключения передач "вниз" посредством первого электромотора. С этой целью, недостаточность крутящего момента для того, чтобы ускорять гибридное транспортное средство, может определяться на основе нажатия педали акселератора и скорости транспортного средства.
Если уровень заряда аккумулятора опускается ниже предварительно определенного уровня при выполнении переключения передач "вниз" в ответ на увеличение требуемой движущей силы, первое управление помощью выполняется вместо второго управления помощью, чтобы способствовать выполнению переключения передач "вниз". Чтобы увеличивать входную частоту вращения для трансмиссии, требуемый крутящий момент первого электромотора меньше требуемого крутящего момента второго электромотора. Следовательно, переключение передач "вниз" может стимулироваться с использованием электричества, накопленного в аккумуляторе, чтобы увеличивать ускорение быстро, и ощущение ускорения может быть улучшено.
При убыстрении выполнения переключения передач "вниз" посредством первого управления помощью при запрете второго управления помощью, подача электрической мощности во второй электромотор может прекращаться. В этом случае, электричество, которое должно подаваться в первый электромотор, может обеспечиваться таким образом, что входная частота вращения для трансмиссии может повышаться безусловно посредством первого электромотора.
В случае выполнения пошагового переключения передач, входная частота вращения для трансмиссии повышается посредством первого электромотора при переключении ступени зубчатой передачи на промежуточную ступень. Следовательно, переключение передач "вниз" вызывается раньше таким образом, что движущая сила увеличивается быстро. Затем второе управление помощью выполняется при переключении ступени зубчатой передачи с промежуточной ступени на целевую ступень, чтобы дополнительно увеличивать ускорение. По этим причинам, водитель может в достаточной степени и непрерывно ощущать увеличение ускорения. Таким образом, ощущение ускорения может быть улучшено даже во время выполнения пошагового переключения передач.
Краткое описание чертежей
Соответствующие признаки, аспекты и преимущества примерных вариантов осуществления настоящего изобретения должны лучше пониматься со ссылкой на нижеприведенное описание и прилагаемые чертежи, которые не должны ограничивать изобретение каким-либо образом. На чертежах:
Фиг. 1 является схематичной иллюстрацией, показывающей конструкцию гибридного транспортного средства, к которому применяется система управления согласно варианту осуществления настоящего изобретения;
Фиг. 2 является блок-схемой, показывающей характерные данные и выходные команды в электронный модуль управления;
Фиг. 3 является блок-схемой последовательности операций способа, показывающей один пример процедуры, которая должна выполняться посредством системы управления согласно варианту осуществления настоящего изобретения;
Фиг. 4 является графиком, показывающим количественный показатель сенсорного теста ускорения;
Фиг. 5a и 5b являются временными диаграммами, показывающими временные изменения ускорения, крутящего момента и входной частоты вращения, во время выполнения управления помощью за счет переключения передач посредством первого электромотора и управления помощью за счет крутящего момента посредством второго электромотора при ускорении транспортного средства, замедляющегося на низкой скорости;
Фиг. 6a и 6b являются временными диаграммами, показывающими временные изменения ускорения, крутящего момента и входной частоты вращения, во время выполнения управления помощью за счет переключения передач посредством первого электромотора и управления помощью за счет крутящего момента посредством второго электромотора при ускорении транспортного средства, движущегося в режиме оптимального регулирования скорости на низкой скорости;
Фиг. 7a и 7b являются временными диаграммами, показывающими временные изменения ускорения, крутящего момента и входной частоты вращения, во время выполнения управления помощью за счет переключения передач посредством первого электромотора и управления помощью за счет крутящего момента посредством второго электромотора при ускорении транспортного средства, замедляющегося на высокой скорости;
Фиг. 8a и 8b являются временными диаграммами, показывающими временные изменения ускорения, крутящего момента и входной частоты вращения, во время выполнения управления помощью за счет переключения передач посредством первого электромотора и управления помощью за счет крутящего момента посредством второго электромотора при ускорении транспортного средства, движущегося в режиме оптимального регулирования скорости на высокой скорости;
Фиг. 9 является блок-схемой последовательности операций способа, показывающей процедуру для того, чтобы избирательно выполнять первое управление помощью и второе управление помощью во время выполнения пошагового переключения передач "вниз";
Фиг. 10a и 10b являются временными диаграммами, показывающими временные изменения ускорения, крутящего момента и входной частоты вращения, во время выполнения управления помощью за счет переключения передач посредством первого электромотора и управления помощью за счет крутящего момента посредством второго электромотора при ускорении транспортного средства, движущегося в режиме оптимального регулирования скорости на высокой скорости, при выполнении пошагового переключения передач "вниз";
Фиг. 11 является блок-схемой последовательности операций способа, показывающей альтернативный этап определения, который может выполняться вместо этапов S3 и S5, показанных на фиг. 3.
Подробное описание предпочтительных вариантов осуществления
Далее поясняются варианты осуществления настоящего изобретения со ссылкой на прилагаемые чертежи. Обращаясь теперь к фиг. 1, показана конструкция гибридного транспортного средства 1 (в дальнейшем называется просто "транспортным средством"), к которому применяется система управления согласно варианту осуществления. Транспортное средство 1 представляет собой транспортное средство с приводом на четыре колеса с передним расположением двигателя и задним приводом, в котором двигатель 2 (называется "ENG" на фиг. 1) размещается в передней секции транспортного средства 1. В транспортном средстве 1, первый электромотор (называется "MG1" на фиг. 1) 3 и автоматическая трансмиссия (называется "A/T" на фиг. 1) размещаются после двигателя 2. В частности, выходной вал двигателя 2 и вал ротора первого электромотора 3 соединяются с входным валом 5 автоматической трансмиссии 5 (в дальнейшем называется просто "трансмиссией").
Например, двигатель внутреннего сгорания, к примеру, бензиновый двигатель и дизельный двигатель, может использоваться в качестве двигателя 2. Степень открытия акселератора и впрыск топлива в двигателе 2 управляются в соответствии с нажатием педали акселератора (т.е. степенью открытия акселератора), чтобы формировать требуемый крутящий момент. Двигатель 2 может бездействовать при прекращении подачи топлива в двигатель 2 посредством управления отсечкой топлива. В этом случае, тормозная сила двигателя может формироваться посредством потерь мощности, к примеру, насосных потерь. Например, синхронный электромотор с постоянными магнитами, т.е. электромотор-генератор, может использоваться в качестве первого электромотора 3, и первый электромотор 3 работает главным образом в качестве генератора.
Трансмиссия 4 представляет собой трансмиссию с зубчатой передачей, в которой ступень зубчатой передачи переключается между множеством ступеней, и, например, автоматическая трансмиссия, описанная в JP 2017-155779 A и т.п., может приспосабливаться в качестве трансмиссии 4. В транспортном средстве 1, автоматическая трансмиссия вида, описанного в JP 2017-155779 А, не имеющая преобразователя крутящего момента, также может приспосабливаться в качестве трансмиссии 4. Ступень зубчатой передачи трансмиссии 4 переключается посредством электрического манипулирования множеством зацепляющих устройств (не показаны). Операция переключения передач трансмиссии 4 выполняется, когда рабочая точка транспортного средства 1, отрегулированная посредством позиции педали акселератора и скорости транспортного средства, переключается вдоль границы переключения передач, задающей области ступеней зубчатой передачи на карте переключения передач. В частности, целевая ступень определяется на основе позиции педали акселератора и скорости транспортного средства или частоты вращения предварительно определенного вращающегося элемента, соответствующего скорости транспортного средства, и зацепляющие устройства зацепляются и расцепляются, чтобы устанавливать целевую ступень. Ступень зубчатой передачи может переключаться не только ступень за ступенью, но также и на ступень, на две или более ступеней выше или ниже текущей ступени. В случае переключения ступени зубчатой передачи на две или более ступеней выше или ниже текущей ступени, ступень зубчатой передачи может переключаться на целевую ступень через промежуточную ступень посредством так называемого "пошагового переключения передач".
Трансмиссия 4 соединяется с блоком 7 заднего дифференциала через задний карданный вал 6 таким образом, что движущий крутящий момент распределяется из заднего блока дифференциала 7 на задние колеса 8. Раздаточная коробка 9 также расположена после трансмиссии 4, с тем чтобы доставлять выходной крутящий момент трансмиссии 4 частично на передние колеса 10 в режиме с приводом на четыре колеса. С этой целью, раздаточная коробка 9 соединяется с блоком 12 переднего дифференциала через передний карданный вал 11 таким образом, что крутящий момент распределяется из блока 12 переднего дифференциала на передние колеса 10.
Например, раздаточная коробка 9 может представлять собой раздаточную коробку подключаемой передачи момента, включающую в себя муфту (не показана), которая избирательно прерывает передачу крутящего момента в зубчатую передачу (не показана) для доставки крутящего момента в передний карданный вал 11, раздаточную коробку постоянной передачи момента, которая всегда распределяет крутящий момент на передние колеса 10 и задние колеса 8 при одновременном обеспечении возможности дифференциального вращения между передними колесами 10 и задними колесами 8, и раздаточную коробку постоянной передачи момента, которая может избирательно ограничивать дифференциальное вращение между передними колесами 10 и задними колесами 8.
Второй электромотор 13 (называется "MG2" на фиг. 1) соединяется с раздаточной коробкой 9, чтобы приводить в действие передний карданный вал 11 (т.е. передние колеса 10). Второй электромотор 13 работает главным образом в качестве электромотора, чтобы формировать движущий крутящий момент для того, чтобы приводить в движение транспортное средство 1, и в силу этого электромотор, имеющий большую производительность, чем первый электромотор 3, приспосабливается в качестве второго электромотора 13. Чтобы рекуперировать энергию во время замедления, предпочтительно использовать электромотор-генератор, к примеру, синхронный электромотор с постоянными магнитами, в качестве второго электромотора 13.
Первый электромотор 3 и второй электромотор 13 электрически соединяются с устройством 14 накопления электричества (называется "BATT" на фиг. 1), таким как аккумулятор и конденсатор. В транспортном средстве 1, в силу этого первый электромотор 3 и второй электромотор 13 могут работать отдельно в качестве электромотора посредством подачи электричества в эти электромоторы из устройства 14 накопления электричества, и электричество, вырабатываемое посредством первого электромотора 3 и второго электромотора 13, может накапливаться в устройстве 14 накопления электричества. Также можно обеспечивать работу второго электромотора 13 в качестве электромотора посредством подачи электричества, вырабатываемого посредством первого электромотора 3, во второй электромотор 13 для того, чтобы приводить в движение транспортное средство 1 посредством выходного крутящего момента второго электромотора 13. Если раздаточная коробка 9 выполнена с возможностью избирательно прерывать передачу крутящего момента через нее, транспортному средству 1 разрешается приводиться в движение в режиме с передним приводом посредством крутящего момента второго электромотора 13 при прерывании передачи крутящего момента через раздаточную коробку 9.
Двигатель 2, первый электромотор 3, второй электромотор 13, трансмиссия 4, раздаточная коробка 9 и т.д. управляются посредством электронного модуля 15 управления (в дальнейшем сокращенно "ECU") в качестве контроллера. ECU 15 состоит главным образом из микрокомпьютера и выполнен с возможностью выполнять вычисление на основе характерных данных, а также данных, установленных заранее, и передает результат вычисления в форме сигнала команды управления. ECU 15 также может формироваться посредством интегрирования модуля управления двигателем, модуля управления электромотором, модуля управления трансмиссией и т.д. Как показано на фиг. 2, ECU 15 принимает данные относительно скорости V транспортного средства; позиции ACC акселератора; уровня состояния заряда (в дальнейшем сокращенно "SOC") устройства 14 накопления электричества; частоты NE вращения двигателя; активационного сигнала Br тормоза; частоты NT вращения входного вала 5 и т.д. ECU 15 передает сигналы команд управления для управления первым электромотором 3, вторым электромотором 13, электронным дроссельным клапаном двигателя 2, ступенью зубчатой передачи трансмиссии 4, раздаточной коробкой 9 и т.д.
Когда требуемая движущая сила увеличивается, чтобы ускорять транспортное средство 1, выполняется переключение передач "вниз" трансмиссии 4. В этой ситуации, система управления согласно варианту осуществления выполняет управление помощью, чтобы повышать ускорение или улучшать ощущение ускорения. В частности, управление помощью выполняется для того, чтобы в достаточной степени увеличивать ускорение, ощущаемое водителем, увеличивать движущую силу, за счет этого позволяя водителю ощущать ускорение за короткое время или способствовать выполнению переключения передач "вниз". В принципе, ускорение увеличивается посредством увеличения движущей силы. В нормальном состоянии, в силу этого управление помощью за счет крутящего момента в качестве второго управления помощью, по существу, выполняется для того, чтобы увеличивать ускорение посредством увеличения выходного крутящего момента второго электромотора 13. В отличие от этого, если величина увеличения выходного крутящего момента второго электромотора 13 является недостаточной, и в силу этого требуемая движущая сила, увеличенная таким способом, не может достигаться, управление помощью за счет переключения передач в качестве первого управления помощью выполняется для того, чтобы способствовать выполнению переключения передач "вниз".
Чтобы избирательно выполнять первое управление помощью и второе управление помощью в зависимости от ситуации, система управления согласно варианту осуществления выполняет процедуру, показанную на фиг. 3. Процедура, показанная на фиг. 3, многократно выполняется с предварительно определенным коротким интервалом в ходе приведения в движение транспортного средства 1. На этапе S1, получаются данные относительно позиции ACC акселератора, скорости V транспортного средства, активационного сигнала Br тормоза, частоты NE вращения двигателя и т.д. После этого на этапе S2 определяется то, намеревается или нет водитель ускорять транспортное средство 1, на основе данных, полученных на этапе S1. Таким образом, определение требуемого ускорения выполняется на этапе S2. Например, такое определение на этапе S2 может выполняться на основе величины увеличения нажатия педали акселератора (не показана). Помимо этого, такое определение на этапе S2 также может выполняться на основе удовлетворения условия для того, чтобы выполнять переключение передач "вниз". На этапе S2, в силу этого определяется то, нажимается или нет педаль акселератора, и то, удовлетворяется или нет условие для того, чтобы выполнять переключение передач "вниз". В частности, определение нажатия педали акселератора может выполняться на основе того факта, что текущее значение нажатия ACC педали акселератора увеличено относительно предыдущего значения, например, несколько секунд назад. С другой стороны, определение удовлетворения условия для того, чтобы выполнять переключение передач "вниз", может выполняться на основе того факта, что более низкая целевая ступень задана на основе скорости V транспортного средства и нажатия ACC педали акселератора со ссылкой на карту переключения передач.
Например, если педаль акселератора возвращается, если нажатие ACC педали акселератора поддерживается, если величина увеличения нажатия ACC меньше предварительно определенного значения, и в силу этого переключение передач "вниз" не вызывается, либо если переключение передач "вниз" вызывается вследствие уменьшения скорости V транспортного средства, водитель не намеревается увеличивать движущую силу, и в силу этого ответ этапа S2 представит собой "Нет". В этих случаях, необязательно выполнять любые из вышеуказанных видов управления помощью, в силу чего процедура возвращается.
В отличие от этого, если водитель намеревается ускорять транспортное средство 1 таким образом, что ответ этапа S2 представляет собой "Да", процедура переходит к этапу S3, чтобы выполнять определение движущей силы. На этапе S3, в частности, определяется то, может либо не может достигаться требуемое ускорение посредством выполнения управления помощью за счет крутящего момента для того, чтобы увеличивать выходной крутящий момент второго электромотора 13, другими словами, определяется то, является или нет крутящий момент, который может формироваться посредством второго электромотора 13, недостаточным для того, чтобы достигать увеличенной требуемой движущей силы. В частности, система управления определяет то, что крутящий момент, который может формироваться посредством второго электромотора 13, является недостаточным для того, чтобы достигать требуемой движущей силы, если количественный показатель сенсорного теста ускорения в случае выполнения управления помощью за счет крутящего момента посредством второго электромотора 13 ниже предварительно определенного значения или ниже количественного показателя сенсорного теста ускорения в случае выполнения управления помощью за счет переключения передач посредством первого электромотора 3.
Например, ощущение ускорения может оцениваться посредством сенсорного теста, описанного в JP-A-2017-48916. В сенсорном тесте, интенсивность стимулирования в качестве произведения величины изменения ускорения и рывка и период плато от момента времени, в который операция ускорения начинается до момента времени, в который водитель может ощущать изменение ускорения, используются в качестве параметров. Количественный показатель сенсорного теста увеличивается с увеличением интенсивности стимулирования и уменьшением периода плато. Фиг. 4 является картой для оценки ощущения ускорения, подготовленного на основе количественных показателей сенсорного теста, проведенного многократно посредством приведения в движение транспортного средства посредством монитора(ов). На фиг. 4, вертикальная ось представляет интенсивность стимулирования, горизонтальная ось представляет период плато, и тонкие кривые являются линиями оценки. Как можно видеть из фиг. 4, количественный показатель сенсорного теста увеличивается с увеличением интенсивности стимулирования и уменьшением периода плато. На фиг. 4, сплошная жирная линия является граничной линией, задающей область, в которой количественный показатель оценки является приемлемым. Если интенсивность стимулирования меньше граничной линии, и период плато превышает граничную линию, изменение ускорения является слишком небольшим, и период до тех пор, пока ускорение не начнет изменяться, является слишком большим. Следовательно, в этом случае, количественный показатель оценки выходит за пределы приемлемой области в рамках граничной линии, и в силу этого водитель может не ощущать ускорение в достаточной степени.
Такое определение недостаточности выходного крутящего момента второго электромотора 13 для того, чтобы достигать требуемой движущей силы, выполняется на основе скорости V транспортного средства и состояния движения непосредственно перед тем, как нажимается педаль акселератора. На этапе S3, в частности, определяется то, выше или нет скорость V транспортного средства опорной скорости V0, заданной, например, равной 70-80 км/ч. Выходной крутящий момент второго электромотора 13 постепенно уменьшается с увеличением частоты вращения второго электромотора 13 после того, как частота вращения второго электромотора 13 превышает определенный уровень частоты вращения. Таким образом, если скорость V транспортного средства является высокой, крутящий момент, который может формироваться посредством второго электромотора 13 для того, чтобы увеличивать ускорение, является небольшим. Следовательно, в этом случае, требуемое ускорение может не достигаться, даже если выполняется управление помощью за счет крутящего момента для того, чтобы увеличивать выходной крутящий момент второго электромотора 13. В противном случае, если скорость V транспортного средства ниже опорной скорости V0 таким образом, что ответ этапа S3 представляет собой "Нет", второму электромотору 13 разрешается формировать крутящий момент в достаточной степени. Следовательно, в этом случае, процедура переходит к этапу S4, чтобы выполнять управление помощью за счет крутящего момента посредством увеличения выходного крутящего момента второго электромотора 13 для того, чтобы увеличивать ускорение. После этого, процедура возвращается.
Здесь подробнее поясняется управление помощью за счет крутящего момента с использованием второго электромотора 13. Ускорение транспортного средства 1, устанавливаемое посредством обеспечения работы второго электромотора 13 в качестве электромотора, регулируется главным образом посредством крутящего момента, который может формироваться посредством второго электромотора 13, и веса транспортного средства 1. Следовательно, опорная скорость V0 может задаваться в зависимости от класса или марки транспортного средства на основе результата эксперимента или моделирования. Чтобы помогать крутящему моменту для приведения в движение транспортного средства 1, выходной крутящий момент второго электромотора 13 может увеличиваться в то время, когда педаль акселератора дополнительно нажимается, либо когда выходной крутящий момент двигателя 2 увеличивается посредством дополнительного нажатия педали акселератора. Величина увеличения выходного крутящего момента (т.е. величина помощи) второго электромотора 13 может определяться заранее в соответствии с нажатием ACC педали акселератора или величиной увеличения нажатия ACC. Во время выполнения управления помощью за счет крутящего момента посредством второго электромотора 13, электричество подается во второй электромотор 13, но не подается в первый электромотор 3. Таким образом, управление помощью за счет переключения передач посредством первого электромотора 3 запрещается. В этой ситуации, первому электромотору 3 разрешается рекуперировать энергию, и электричество, рекуперированное посредством первого электромотора 3, может подаваться во второй электромотор 13.
Определение недостаточности выходного крутящего момента второго электромотора 13 для того, чтобы достигать требуемой движущей силы, может выполняться только на основе скорости V транспортного средства. Помимо этого, в процедуре, показанной на фиг. 3, недостаточность выходного крутящего момента второго электромотора 13 для того, чтобы достигать требуемой движущей силы, определяется также на основе состояния движения непосредственно перед тем, как нажимается педаль акселератора. Соответственно, если скорость V транспортного средства выше опорной скорости V0 таким образом, что ответ этапа S3 представляет собой "Да", процедура переходит к этапу S5, чтобы определять то, движется или нет транспортное средство 1 в режиме оптимального регулирования скорости с постоянной скоростью непосредственно перед тем, как педаль акселератора нажимается. На этапе S5, в частности, определяется то, нажимается или нет педаль акселератора немного, и нажатие педали акселератора поддерживается для того, чтобы приводить в движение транспортное средство 1 с постоянной скоростью или немного ускорять транспортное средство 1. Если ответ этапа S5 представляет собой "Нет", процедура также переходит к этапу S4, чтобы выполнять управление помощью за счет крутящего момента посредством увеличения выходного крутящего момента второго электромотора 13 для того, чтобы увеличивать ускорение. После этого, процедура возвращается. В этом случае, педаль акселератора не нажимается, и в силу этого транспортное средство 1 замедляется. Таким образом, если требуемая движущая сила увеличивается, и ускорение увеличивается даже немного, замедление превращается в положительное ускорение, и интенсивность стимулирования увеличивается. Следовательно, в этом случае, водитель может в достаточной степени ощущать ускорение посредством выполнения управления помощью за счет крутящего момента посредством второго электромотора 13, даже если скорость V транспортного средства является высокой, и в силу этого крутящий момент, который может формироваться посредством второго электромотора 13, меньше крутящего момента для случая, в котором скорость V транспортного средства является низкой, либо даже если электричество, которое может подаваться из устройства 14 накопления электричества во второй электромотор 13, является небольшим.
В отличие от этого, если транспортное средство 1 движется в режиме оптимального регулирования скорости с постоянной скоростью непосредственно перед тем, как педаль акселератора нажимается таким образом, что ответ этапа S5 представляет собой "Да", процедура переходит к этапу S6, чтобы выполнять управление помощью за счет переключения передач посредством первого электромотора 3, и после этого возвращается. В этом случае, управление помощью за счет крутящего момента посредством второго электромотора 13 может запрещаться посредством прекращения подачи электрической мощности во второй электромотор 13. В частности, управление помощью за счет переключения передач выполняется для того, чтобы повышать частоту NT вращения входного вала 5 трансмиссии 4 посредством выходного крутящего момента первого электромотора посредством подачи электричества из устройства 14 накопления электричества только в первый электромотор 3, за счет этого обеспечивая работу первого электромотора 3 в качестве электромотора. Здесь, частота NT вращения входного вала 5 трансмиссии 4 увеличивается в направлении, идентичном направлению вращения двигателя 2. В этом случае, в частности, первый электромотор 3 формирует крутящий момент таким образом, что частота NT вращения входного вала 5 трансмиссии 4 увеличивается с предварительно определенным темпом. С этой целью, выходной крутящий момент первого электромотора 3 может управляться посредством передачи сигнала команды управления, заданного на основе результата эксперимента и т.п., в первый электромотор 3. Вместо этого, выходной крутящий момент первого электромотора 3 может управляться посредством способа обратной связи с использованием сигнала определения частоты NT вращения входного вала 5 трансмиссии 4. Чтобы повышать частоту NT вращения входного вала 5 трансмиссии 4, выходной крутящий момент первого электромотора 3 может увеличиваться в то время, когда педаль акселератора дополнительно нажимается, либо когда выходной крутящий момент двигателя 2 увеличивается посредством дополнительного нажатия педали акселератора.
В этом случае, частота NT вращения входного вала 5 повышается посредством первого электромотора 3 в состоянии, в котором переключение передач "вниз" выполняется посредством трансмиссии 4. Следовательно, частота NT вращения входного вала 5 повышается до синхронной частоты вращения на целевой ступени посредством обеспечения работы первого электромотора 3 в качестве электромотора таким образом, что выполнение переключения передач "вниз" стимулируется. В этом случае, когда педаль акселератора нажимается, двигатель 2 запускается, и выходной крутящий момент двигателя 2 увеличивается. Помимо этого, выходной крутящий момент первого электромотора 3 суммируется с выходным крутящим моментом двигателя 2 таким образом, что частота NT вращения входного вала 5 повышается быстро по сравнению со случаем повышения частоты NT вращения входного вала 5 только посредством выходного крутящего момента двигателя 2. В частности, если преобразователь крутящего момента опускается, и инерционный момент маховика увеличивается, чтобы улучшать характеристики шума и вибрации в диапазоне низких скоростей, частота вращения двигателя 2 не должна быстро повышаться. Тем не менее, в этом случае, первый электромотор 3 формирует крутящий момент для того, чтобы повышать частоту вращения двигателя 2 таким образом, что переключение передач "вниз" трансмиссии 4 стимулируется. По этой причине, движущий крутящий момент увеличивается быстро посредством переключения передач "вниз" трансмиссии 4 таким образом, что водитель может ощущать увеличение ускорения в короткое время. Таким образом, количественный показатель оценки ускорения увеличивается.
Электромоторы, которые должны использоваться в вышеописанных видах управления помощью, указываются в следующей таблице 1. В таблице 1, определение "низкая скорость" заключается в том, что скорость V транспортного средства ниже опорной скорости V0, и определение "высокая скорость" заключается в том, что скорость V транспортного средства выше опорной скорости V0. С другой стороны, определение "полностью закрыт" заключается в том, что нажатие ACC педали акселератора увеличено от "0", и определение "постоянный" заключается в том, что нажатие ACC педали акселератора увеличено от степени, поддерживаемой для того, чтобы обеспечивать движение в режиме оптимального регулирования скорости транспортного средства 1.
Таблица 1
Таким образом, согласно варианту осуществления настоящего изобретения, управление помощью за счет переключения передач и управление помощью за счет крутящего момента избирательно выполняются, когда требуемая движущая сила увеличивается в зависимости от нажатия ACC, представляющего требуемую движущую силу, или величины увеличения нажатия ACC. Соответственно, этапы S2-S6 соответствуют "избирательному управлению" варианта осуществления.
Здесь поясняются примеры для того, чтобы выполнять процедуру, показанную на фиг. 3, в различных ситуациях со ссылкой на фиг. 5a-8b.
Фиг. 5a и 5b показывают примеры выполнения процедуры, показанной на фиг. 3, в состоянии, в котором транспортное средство 1 замедляется на скорости ниже опорной скорости V0. В частности, фиг. 5a показывает ситуацию, в которой управление помощью за счет переключения передач посредством первого электромотора 3 выполняется при вышеуказанном условии, и фиг. 5b показывает ситуацию, в которой управление помощью за счет крутящего момента посредством второго электромотора 13 выполняется при вышеуказанном условии. В этом случае, до выполнения процедуры, показанной на фиг. 3, транспортное средство 1 замедляется, и в силу этого ускорение G является отрицательным. В этой ситуации, крутящий момент T первичного движителя (включающий в себя крутящий момент Te двигателя 2, крутящий момент Tmg1 первого электромотора 3 и крутящий момент Tmg2 второго электромотора 13) и частота NE вращения двигателя равны нулю. Педаль акселератора нажимается в момент t0 времени, т.е. требуемая движущая сила увеличивается в момент t0 времени. Следовательно, двигатель 2 проворачивается посредством первого электромотора 3, другими словами, прокручивание двигателя 2 выполняется, и частота NE вращения двигателя постепенно увеличивается. Запуск двигателя 2 завершается в момент t1 времени, и крутящий момент Te двигателя начинает увеличиваться от момента t1 времени. В случае выполнения управления помощью за счет переключения передач посредством первого электромотора 3, как показано на фиг. 5a, выходной крутящий момент Tmg1 первого электромотора 3 увеличивается от момента t2 времени, и в силу этого частота NE вращения двигателя и частота NT вращения входного вала 5 (в дальнейшем называется просто "входной частотой NT вращения") увеличиваются от момента t2 времени. Как результат, переключение передач "вниз" трансмиссии 4 стимулируется. Тем не менее, в этом случае, управление помощью за счет крутящего момента посредством второго электромотора 13 не выполняется, и помимо этого, крутящий момент Te двигателя потребляется, чтобы повышать скорость. По этим причинам, в начальной фазе увеличения нажатия ACC педали акселератора, ускорение G увеличивается только до относительно более низкого уровня G1. Затем, поскольку входная частота NT вращения повышена, чтобы способствовать выполнению переключения передач "вниз", переключение передач "вниз" трансмиссии 4 завершается в момент t3 времени, и в силу этого ускорение G дополнительно увеличивается. В этом случае, хотя ускорение G увеличивается, требуется относительно большее время для того, чтобы увеличивать ускорение G до ощущаемого уровня от момента t0 времени. Таким образом, период плато увеличивается.
В случае выполнения управления помощью за счет крутящего момента посредством второго электромотора 13, как показано на фиг. 5b, второй электромотор 13 формирует крутящий момент Tmg2 в момент t2 времени, чтобы приводить в движение передние колеса 10. Следовательно, в начальной фазе увеличения нажатия ACC педали акселератора, ускорение G увеличивается до уровня G2, который выше уровня G1 для случая выполнения управления помощью за счет переключения передач посредством первого электромотора 3. В этом случае, входная частота NT вращения повышается только посредством двигателя 2, в силу этого переключение передач "вниз" не стимулируется и завершается в момент t4 времени после момента t3 времени. Следовательно, ускорение G дополнительно увеличивается от момента t4 времени. Таким образом, ускорение G увеличивается непрерывно.
В случае выполнения управления помощью за счет переключения передач посредством первого электромотора 3, хотя переключение передач "вниз" трансмиссии 4 стимулируется, величина увеличения ускорения G в начальной фазе является относительно небольшой. В отличие от этого, в случае выполнения управления помощью за счет крутящего момента посредством второго электромотора 13, выходной крутящий момент второго электромотора 13 доставляется на передние колеса 10 в качестве ведущих колес в режиме с приводом на четыре колеса. Следовательно, в этом случае, ускорение G транспортного средства 1 дополнительно может увеличиваться. В частности, в примерах, показанных на фиг. 5a и 5b, замедляющееся транспортное средство 1 ускоряется. Следовательно, интенсивность стимулирования ускорения G, ощущаемая водителем, может увеличиваться без значительного увеличения выходного крутящего момента Tmg2 второго электромотора 13. По этой причине, в примерах, показанных на фиг. 5a и 5b, количественный показатель A2 оценки ощущения ускорения в случае выполнения управления помощью за счет крутящего момента посредством второго электромотора 13 выше количественного показателя A1 оценки ощущения ускорения в случае выполнения управления помощью за счет переключения передач посредством первого электромотора 3 (A1<A2).
Фиг. 6a и 6b показывают примеры выполнения процедуры, показанной на фиг. 3, в состоянии, в котором транспортное средство 1 движется в режиме оптимального регулирования скорости на скорости ниже опорной скорости V0. В частности, фиг. 6a показывает ситуацию, в которой управление помощью за счет переключения передач посредством первого электромотора 3 выполняется при вышеуказанном условии, и фиг. 6b показывает ситуацию, в которой управление помощью за счет крутящего момента посредством второго электромотора 13 выполняется при вышеуказанном условии. В этом случае, до выполнения процедуры, показанной на фиг. 3, транспортное средство 1 движется в режиме оптимального регулирования скорости, и в силу этого ускорение G является практически нулевым. В этой ситуации, двигатель 2 формирует крутящий момент Te для того, чтобы поддерживать скорость V транспортного средства относительно нагрузки от дороги на предварительно определенной частоте NE вращения. С другой стороны, ни один из первого электромотора 3 и второго электромотора 13 не работает ни в качестве электромотора, ни в качестве генератора, в силу чего крутящий момент Tmg1 первого электромотора 3 и крутящий момент Tmg2 второго электромотора 13, соответственно, равны нулю. Педаль акселератора нажимается в момент t10 времени, т.е. требуемая движущая сила увеличивается в момент t10 времени. Следовательно, крутящий момент Te двигателя постепенно увеличивается с увеличением нажатия ACC педали акселератора. В случае выполнения управления помощью за счет переключения передач посредством первого электромотора 3, как показано на фиг. 6a, входная частота NT вращения постепенно увеличивается посредством выходного крутящего момента Tmg1 первого электромотора 3 немного после увеличения крутящего момента Te двигателя. В этом случае, выполнение переключения передач "вниз" стимулируется, за счет этого повышая входную частоту NT вращения посредством выходного крутящего момента Tmg1 первого электромотора 3 таким образом, что переключение передач "вниз" трансмиссии 4 завершается в момент t11 времени. Следовательно, ускорение G постепенно увеличивается с увеличением передаточного отношения трансмиссии 4. Тем не менее, в этом случае, управление помощью за счет крутящего момента посредством второго электромотора 13 не выполняется. По этой причине, в начальной фазе увеличения нажатия ACC педали акселератора, ускорение G увеличивается только до относительно более низкого уровня G11.
В случае выполнения управления помощью за счет крутящего момента посредством второго электромотора 13, как показано на фиг. 6b, второй электромотор 13 формирует крутящий момент Tmg2 в момент t10 времени или сразу после момента t10 времени, чтобы приводить в движение передние колеса 10. Следовательно, в начальной фазе увеличения нажатия ACC педали акселератора, ускорение G увеличивается до уровня G12, который выше уровня G11 для случая выполнения управления помощью за счет переключения передач посредством первого электромотора 3. В этом случае, входная частота NT вращения повышается только посредством двигателя 2, в силу этого переключение передач "вниз" не стимулируется и завершается в момент t12 времени после момента t11 времени. Следовательно, ускорение G дополнительно увеличивается от момента t12 времени.
В случае выполнения управления помощью за счет переключения передач посредством первого электромотора 3, хотя переключение передач "вниз" трансмиссии 4 стимулируется, величина увеличения ускорения G в начальной фазе является относительно небольшой. В отличие от этого, в случае выполнения управления помощью за счет крутящего момента посредством второго электромотора 13, выходной крутящий момент второго электромотора 13 доставляется на передние колеса 10 в качестве ведущих колес в режиме с приводом на четыре колеса. Следовательно, в этом случае, ускорение G транспортного средства 1 дополнительно может увеличиваться. В этом случае, чтобы выполнять управление помощью за счет крутящего момента посредством второго электромотора 13 в движущемся в режиме оптимального регулирования скорости транспортном средстве 1, необходимо повышать частоту вращения второго электромотора 13 до определенного уровня. Тем не менее, поскольку скорость V транспортного средства ниже опорной скорости V0, необязательно увеличивать частоту вращения второго электромотора 13 значительно, чтобы приводить в движение транспортное средство 1. Следовательно, в этом случае, второму электромотору 13 разрешается формировать крутящий момент Tmg2 в достаточной степени для того, чтобы выполнять управление помощью за счет крутящего момента, и интенсивность стимулирования ускорения G, ощущаемая водителем, может увеличиваться. По этой причине, в примерах, показанных на фиг. 6a и 6b, количественный показатель B2 оценки ощущения ускорения в случае выполнения управления помощью за счет крутящего момента посредством второго электромотора 13 выше количественного показателя B1 оценки ощущения ускорения в случае выполнения управления помощью за счет переключения передач посредством первого электромотора 3 (B1<B2).
Фиг. 7a и 7b показывают примеры выполнения процедуры, показанной на фиг. 3, в состоянии, в котором транспортное средство 1 замедляется на скорости выше опорной скорости V0, и условие для того, чтобы выполнять пошаговое переключение передач, удовлетворяется вследствие увеличения требуемой движущей силы. В частности, фиг. 7a показывает ситуацию, в которой управление помощью за счет переключения передач посредством первого электромотора 3 выполняется при вышеуказанном условии, и фиг. 7b показывает ситуацию, в которой управление помощью за счет крутящего момента посредством второго электромотора 13 выполняется при вышеуказанном условии. В этом случае, до выполнения процедуры, показанной на фиг. 3, транспортное средство 1 замедляется, и в силу этого ускорение G является отрицательным. В этой ситуации, крутящий момент T первичного движителя (Te, Tmg1, Tmg2) и входная частота NT вращения равны нулю. Педаль акселератора нажимается в момент t20 времени, т.е. требуемая движущая сила увеличивается в момент t20 времени. Следовательно, двигатель 2 проворачивается посредством первого электромотора 3, другими словами, прокручивание двигателя 2 выполняется, и частота NE вращения двигателя постепенно увеличивается. Когда запуск двигателя 2 завершается, крутящий момент Te двигателя начинает увеличиваться. В случае выполнения управления помощью за счет переключения передач посредством первого электромотора 3, как показано на фиг. 7a, выходной крутящий момент Tmg1 первого электромотора 3 увеличивается от момента t21 времени, и входная частота NT вращения увеличивается, когда частота NE вращения двигателя достигает самоподдерживающейся частоты вращения. Как результат, переключение передач "вниз" трансмиссии 4 стимулируется. Тем не менее, в этом случае, управление помощью за счет крутящего момента посредством второго электромотора 13 не выполняется. По этой причине, в начальной фазе увеличения нажатия ACC педали акселератора, ускорение G в качестве замедления увеличивается только приблизительно до нуля. Затем, поскольку входная частота NT вращения повышена, чтобы способствовать выполнению переключения передач "вниз", переключение передач "вниз" трансмиссии 4 на промежуточную ступень завершается в момент t22 времени, и в силу этого ускорение G дополнительно увеличивается. После этого, переключение передач "вниз" с промежуточной ступени на целевую ступень, заданное на основе требуемой движущей силы, увеличенной таким способом, завершается в момент t23 времени. Следовательно, передаточное отношение дополнительно увеличивается таким образом, что движущая сила, а также ускорение G дополнительно увеличиваются. После этого, поскольку крутящий момент Te двигателя по-прежнему увеличивается, ускорение G дополнительно увеличивается с увеличением крутящего момента Te двигателя. Во время выполнения переключения передач "вниз" с промежуточной ступени на целевую ступень, ни один из видов управления помощью не выполняется. Тем не менее, в этой ситуации, запуск двигателя 2 уже завершен, и крутящий момент Te двигателя формируется в достаточной степени посредством двигателя 2. В этой ситуации, хотя увеличение ускорения G временно попадает в зону плато, такое плато ускорения G является просто временным и не должно ощущаться водителем. Таким образом, водитель может не замечать, что переключение передач "вниз" выполняется пошагово. Тем не менее, в случае выполнения управления помощью за счет переключения передач посредством первого электромотора 3, водитель может не ощущать увеличение ускорения G до момента t22 времени после момента t21 времени. Таким образом, период плато увеличивается.
В случае выполнения управления помощью за счет крутящего момента посредством второго электромотора 13, как показано на фиг. 7b, второй электромотор 13 формирует крутящий момент Tmg2 в момент t21 времени, чтобы приводить в движение передние колеса 10. Следовательно, в начальной фазе увеличения нажатия ACC педали акселератора, ускорение G в качестве замедления увеличивается до уровня выше уровня для случая выполнения управления помощью за счет переключения передач посредством первого электромотора 3. В этом случае, входная частота NT вращения повышается только посредством двигателя 2, в силу этого переключение передач "вниз" не стимулируется, и переключение передач "вниз" на промежуточную ступень завершается в момент t24 времени после момента t22 времени. Следовательно, ускорение G дополнительно увеличивается от момента t24 времени. После этого, ускорение G дополнительно увеличивается, как пояснено в примере, показанном на фиг. 7a. Таким образом, водитель может ощущать увеличение ускорения G непрерывно.
В случае выполнения управления помощью за счет переключения передач посредством первого электромотора 3, хотя переключение передач "вниз" трансмиссии 4 стимулируется, величина увеличения ускорения G в начальной фазе является относительно небольшой. В частности, в примере, показанном на фиг. 7a, ускорение G увеличивается в начальной фазе просто до уровня, сравнительного с уровнем, достигаемым посредством отмены тормозной силы двигателя. В отличие от этого, в случае выполнения управления помощью за счет крутящего момента посредством второго электромотора 13, выходной крутящий момент второго электромотора 13 доставляется на передние колеса 10 в качестве ведущих колес в режиме с приводом на четыре колеса. Следовательно, в этом случае, ускорение G транспортного средства 1 дополнительно может увеличиваться. В частности, в примерах, показанных на фиг. 7a и 7b, замедляющееся транспортное средство 1 ускоряется. Следовательно, интенсивность стимулирования ускорения G, ощущаемая водителем, может увеличиваться без значительного увеличения выходного крутящего момента Tmg2 второго электромотора 13. По этой причине, в примерах, показанных на фиг. 7a и 7b, количественный показатель C2 оценки ощущения ускорения в случае выполнения управления помощью за счет крутящего момента посредством второго электромотора 13 выше количественного показателя C1 оценки ощущения ускорения в случае выполнения управления помощью за счет переключения передач посредством первого электромотора 3 (C1<C2).
Фиг. 8a и 8b показывают примеры выполнения процедуры, показанной на фиг. 3, в состоянии, в котором транспортное средство 1 движется в режиме оптимального регулирования скорости на скорости выше опорной скорости V0, и условие для того, чтобы выполнять пошаговое переключение передач, удовлетворяется вследствие увеличения требуемой движущей силы. В частности, фиг. 8a показывает ситуацию, в которой управление помощью за счет переключения передач посредством первого электромотора 3 выполняется при вышеуказанном условии, и фиг. 8b показывает ситуацию, в которой управление помощью за счет крутящего момента посредством второго электромотора 13 выполняется при вышеуказанном условии. В этом случае, до выполнения процедуры, показанной на фиг. 3, транспортное средство 1 движется в режиме оптимального регулирования скорости, и в силу этого ускорение G является практически нулевым. В этой ситуации, двигатель 2 формирует крутящий момент Te для того, чтобы поддерживать скорость V транспортного средства относительно нагрузки от дороги на предварительно определенной частоте NE вращения. С другой стороны, ни один из первого электромотора 3 и второго электромотора 13 не работает ни в качестве электромотора, ни в качестве генератора, в силу чего крутящий момент Tmg1 первого электромотора 3 и крутящий момент Tmg2 второго электромотора 13, соответственно, равны нулю. Педаль акселератора нажимается в момент t30 времени, т.е. требуемая движущая сила увеличивается в момент t30 времени. Следовательно, крутящий момент Te двигателя постепенно увеличивается от момента t30 времени с увеличением нажатия ACC педали акселератора. В случае выполнения управления помощью за счет переключения передач посредством первого электромотора 3, как показано на фиг. 8a, входная частота NT вращения постепенно увеличивается посредством выходного крутящего момента Tmg1 первого электромотора 3 немного после увеличения крутящего момента Te двигателя. В этом случае, выполнение переключения передач "вниз" стимулируется, за счет этого повышая входную частоту NT вращения посредством выходного крутящего момента Tmg1 первого электромотора 3 таким образом, что переключение передач "вниз" трансмиссии 4 на промежуточную ступень завершается в момент t31 времени. Следовательно, ускорение G постепенно увеличивается с увеличением передаточного отношения трансмиссии 4. После этого, переключение передач "вниз" с промежуточной ступени на целевую ступень, заданное на основе требуемой движущей силы, увеличенной таким способом, завершается в момент t33 времени. Следовательно, передаточное отношение дополнительно увеличивается таким образом, что движущая сила, а также ускорение G дополнительно увеличиваются. После этого, когда частота NE вращения двигателя и т.п. достигает частоты вращения, которая должна достигаться на целевой ступени, ускорение G дополнительно увеличивается с увеличением крутящего момента Te двигателя. В случае примера, показанного на фиг. 8a, в силу этого увеличение ускорения G ощущается водителем в момент t31 времени, и ускорение G попадает в зону плато от момента t30 времени до момента t31 времени. В этом случае, крутящий момент Te двигателя потребляется, чтобы увеличивать частоты вращения непосредственно двигателя 2 и трансмиссии 4, и управление помощью за счет крутящего момента посредством второго электромотора 13 не выполняется. По этой причине, в начальной фазе увеличения нажатия ACC педали акселератора, ускорение G увеличивается временно, но только приблизительно до нуля.
В случае выполнения управления помощью за счет крутящего момента посредством второго электромотора 13, как показано на фиг. 8b, второй электромотор 13 формирует крутящий момент Tmg2, когда педаль акселератора нажимается в момент t30 времени, чтобы приводить в движение передние колеса 10. Следовательно, в начальной фазе увеличения нажатия ACC педали акселератора, ускорение G в качестве замедления увеличивается до уровня выше уровня для случая выполнения управления помощью за счет переключения передач посредством первого электромотора 3. Тем не менее, в этом случае, транспортное средство 1 приводится в движение на высокой скорости, и в силу этого второй электромотор 13 должен формировать крутящий момент Tmg2 на высокой скорости. Таким образом, крутящий момент Tmg2, сформированный посредством второго электромотора 13 в этой ситуации, является недостаточным для того, чтобы достигать требуемой движущей силы, увеличенной таким способом, и в силу этого ускорение G не увеличивается до уровня, который может ощущаться водителем. Помимо этого, входная частота NT вращения повышается только посредством двигателя 2, в силу этого переключение передач "вниз" не стимулируется и завершается в момент t33 времени после момента t31 времени. Следовательно, ускорение G дополнительно увеличивается от момента t33 времени. После этого, ускорение G дополнительно увеличивается, как пояснено в примере, показанном на фиг. 8a. Следовательно, водитель может не ощущать увеличение ускорения G до момента t33 времени. Таким образом, период плато увеличивается от момента t30 времени до момента t33 времени.
В случае выполнения управления помощью за счет переключения передач посредством первого электромотора 3, выполнение переключения передач "вниз" трансмиссии 4 стимулируется таким образом, что водителю разрешается ощущать увеличение ускорения G относительно в короткое время. Таким образом, период плато ускорения G уменьшается. В отличие от этого, в случае выполнения управления помощью за счет крутящего момента посредством второго электромотора 13, второй электромотор 13 должен формировать крутящий момент Tmg2 на высокой скорости. Таким образом, второму электромотору 13 не разрешается формировать крутящий момент Tmg2 в достаточной степени для того, чтобы увеличивать ускорение G. Следовательно, в этом случае, ускорение G может не увеличиваться до уровня, который может ощущаться водителем. Помимо этого, поскольку управление помощью за счет переключения передач не выполняется посредством первого электромотора 3, завершение переключения передач "вниз" задерживается, и в силу этого период плато ускорения G увеличивается. Таким образом, требуется большее время для того, чтобы позволять водителю ощущать увеличение ускорения G. По этим причинам, в примерах, показанных на фиг. 8a и 8b, количественный показатель D1 оценки ощущения ускорения в случае выполнения управления помощью за счет переключения передач посредством первого электромотора 3 выше количественного показателя D2 оценки ощущения ускорения в случае выполнения управления помощью за счет крутящего момента посредством второго электромотора 13 (D1>D2).
В случае приведения в движение транспортного средства, имеющего автоматическую трансмиссию, на постоянной высокой скорости, ступень зубчатой передачи для небольшого передаточного отношения задается в трансмиссии, и в силу этого движущая сила для того, чтобы приводить в движение транспортное средство, является небольшой. В этой ситуации, когда педаль акселератора нажимается, чтобы ускорять транспортное средство, ступень зубчатой передачи трансмиссии может переключаться на ступень на две или более ступеней ниже текущей ступени, чтобы увеличивать движущую силу. Такая операция переключения передач называется "переключением передач с пропусками". В этом случае, ступень зубчатой передачи может не переключаться непосредственно на целевую ступень. В частности, ступень зубчатой передачи может переключаться временно на промежуточную ступень, на которой передаточное отношение находится между отношениями текущей ступени и целевой ступени, и дополнительно переключаться с промежуточной ступени на целевую ступень. Как описано выше, такая операция переключения передач называется "пошаговым переключением передач". Согласно варианту осуществления настоящего изобретения, вышеописанное избирательное управление также может выполняться в случае переключения передач с пропусками. В частности, в случае переключения передач "вниз" с пропусками на высокой скорости, управление помощью за счет переключения передач посредством первого электромотора 3 выполняется для того, чтобы повышать входную частоту NT вращения при переключении с текущей ступени на промежуточную ступень, и управление помощью за счет крутящего момента посредством второго электромотора 13 выполняется для того, чтобы увеличивать движущую силу передних колес 10 при переключении с промежуточной ступени на целевую ступень.
Чтобы избирательно выполнять управление помощью за счет переключения передач и управление помощью за счет крутящего момента в случае переключения передач "вниз" с пропусками, система управления согласно варианту осуществления выполняет процедуру, показанную на фиг. 9. Процедура, показанная на фиг. 9, выполняется, когда требуемая движущая сила увеличивается до степени, которая вызывает переключение передач "вниз" в ходе приведения в движение транспортного средства 1. На этапе S10, определяется то, должно или нет выполняться пошаговое переключение передач "вниз". Как описано выше, целевая ступень определяется на основе нажатия ACC педали акселератора и скорости V транспортного средства со ссылкой на карту переключения передач. Соответственно, определение на этапе S10 может выполняться посредством сравнения текущей ступени зубчатой передачи с целевой ступенью, определенной таким способом.
Если ответ этапа S10 представляет собой "Нет", процедура переходит к этапу S11, чтобы выполнять управление помощью за счет переключения передач посредством увеличения входной частоты NT вращения посредством первого электромотора 3, чтобы способствовать выполнению переключения передач "вниз", и после этого возвращается. Как пояснено со ссылкой на фиг. 8a и 8b, если транспортное средство 1 приводится в движение на высокой скорости, ускорение может не увеличиваться в достаточной степени посредством выходного крутящего момента второго электромотора 13. Следовательно, в этом случае, управление помощью за счет переключения передач посредством первого электромотора 3 выполняется для того, чтобы способствовать выполнению переключения передач "вниз", за счет этого уменьшая период плато ускорения, чтобы улучшать ощущение ускорения.
В отличие от этого, если ответ этапа S10 представляет собой "Да", процедура переходит к этапу S12, чтобы определять то, может или нет ускорение увеличиваться в достаточной степени посредством движущей силы, сформированной посредством двигателя 2, и движущей силы, сформированной посредством второго электромотора 13 на промежуточной ступени. Таким образом, на этапе S12, определяется то, разрешается или нет второму электромотору 13 формировать крутящий момент в достаточной степени для того, чтобы достигать увеличенной требуемой движущей силы. Опорное ускорение, чтобы выполнять определение на этапе S12, может задаваться в зависимости от класса или марки транспортного средства на основе результата эксперимента или моделирования. Крутящий момент, который может формироваться посредством второго электромотора 13, может оцениваться на основе электричества, которое может подаваться из устройства 14 накопления электричества, и характеристики крутящего момента второго электромотора 13.
Если ответ этапа S12 представляет собой "Нет", процедура также переходит к этапу S11, чтобы выполнять управление помощью за счет переключения передач посредством увеличения входной частоты NT вращения посредством первого электромотора 3, чтобы способствовать выполнению переключения передач "вниз", и после этого возвращается. Таким образом, в этом случае, интенсивность стимулирования не может увеличиваться в достаточной степени. Следовательно, управление помощью за счет переключения передач посредством первого электромотора 3 выполняется для того, чтобы уменьшать период плато ускорения, за счет этого улучшая ощущение ускорения.
Если ответ этапа S12, процедура переходит к этапу S13 для того, чтобы определять то, переключена или нет ступень зубчатой передачи на промежуточную ступень. Другими словами, определяется то, увеличено или нет передаточное отношение до отношения, которое должно достигаться на промежуточной ступени. Если передаточное отношение еще не увеличено до отношения, которое должно достигаться на промежуточной ступени таким образом, что ответ этапа S13 представляет собой "Нет", процедура также переходит к этапу S11, чтобы выполнять управление помощью за счет переключения передач посредством первого электромотора 3, и после этого возвращается. Таким образом, согласно процедуре, показанной на фиг. 9, управление помощью за счет переключения передач посредством первого электромотора 3 выполняется сначала, чтобы убыстрять переключение передач "вниз" на промежуточную ступень в случае пошагового переключения передач "вниз". В этой ситуации, управление помощью за счет крутящего момента может выполняться одновременно посредством обеспечения работы второго электромотора 13 в качестве электромотора, чтобы формировать крутящий момент, даже если крутящий момент второго электромотора 13 является недостаточным.
Если ступень зубчатой передачи переключена на промежуточную ступень таким образом, что ответ этапа S13 представляет собой "Да", процедура переходит к этапу S14, чтобы выполнять управление помощью за счет крутящего момента посредством второго электромотора 13. Как результат переключения ступени зубчатой передачи на промежуточную ступень, движущая сила и ускорение увеличиваются в соответствии с передаточным отношением на промежуточной ступени, и водитель может ощущать увеличение ускорения. Следовательно, в этом случае, необязательно обеспечивать работу первого электромотора 3 в качестве электромотора, чтобы увеличивать входную частоту NT вращения. По этой причине, управление помощью за счет крутящего момента посредством второго электромотора 13 выполняется вместо управления помощью за счет переключения передач посредством первого электромотора 3. Посредством такого запрета выполнения управления помощью за счет переключения передач посредством первого электромотора 3, электричество, накопленное в устройстве 14 накопления электричества, подается только во второй электромотор 13 таким образом, что второму электромотору 13 разрешается формировать крутящий момент в достаточной степени в соответствии с подачей мощности из устройства 14 накопления электричества. Следовательно, транспортное средство 1 приводится в движение посредством движущей силы, сформированной посредством двигателя 2, и движущей силы, сформированной посредством второго электромотора 13, и в силу этого ускорение транспортного средства 1 может увеличиваться. В этой ситуации, входная частота NT вращения уже изменена к частоте вращения, которая должна достигаться на промежуточной ступени таким образом, что входная частота NT вращения повышается в достаточной степени посредством выходного крутящего момента двигателя 2. По этой причине, водитель может ощущать ускорение, увеличенное посредством переключения ступени зубчатой передачи на промежуточную скорость, после короткого периода плато, и затем ускорение дополнительно увеличивается посредством выходного крутящего момента второго электромотора 13. Таким образом, ускорение транспортного средства 1 может увеличиваться быстро незамедлительно, с тем чтобы улучшать ощущение ускорения.
Фиг. 10a и 10b показывают примеры выполнения процедуры, показанной на фиг. 9, в состоянии, в котором пошаговое переключение передач "вниз" выполняется в транспортном средстве 1, которое движется в режиме оптимального регулирования скорости на высокой скорости. В частности, фиг. 10a показывает ситуацию, в которой только управление помощью за счет переключения передач посредством первого электромотора 3 выполняется при вышеуказанном условии. В этом случае, до выполнения процедуры, показанной на фиг. 9, двигатель 2 формирует крутящий момент Te для того, чтобы сохранять скорость V транспортного средства равной постоянной скорости при вращении на частоте вращения в соответствии с транспортным средством V. В этой ситуации, поскольку транспортное средство 1 движется в режиме оптимального регулирования скорости, ускорение G транспортного средства 1 является практически нулевым. С другой стороны, ни один из первого электромотора 3 и второго электромотора 13 не работает ни в качестве электромотора, ни в качестве генератора, в силу чего крутящий момент Tmg1 первого электромотора 3 и крутящий момент Tmg2 второго электромотора 13, соответственно, равны нулю. Педаль акселератора нажимается в момент t40 времени, т.е. требуемая движущая сила увеличивается в момент t40 времени. Следовательно, в момент t40 времени или сразу после момента t40 времени, крутящий момент Te двигателя и крутящий момент Tmg1 первого электромотора 3 увеличиваются, и после этого входная частота NT вращения начинает увеличиваться. В этой ситуации, поскольку выходной крутящий момент Te двигателя потребляется почти полностью, чтобы увеличивать частоту вращения, ускорение G значительно не увеличивается.
Как результат такого повышения входной частоты NT вращения посредством первого электромотора 3, переключение передач "вниз" стимулируется таким образом, что ступень зубчатой передачи переключается на промежуточную ступень в момент t41 времени за относительно короткое время. Следовательно, выходной крутящий момент Te двигателя 2 увеличивается в соответствии с передаточным отношением на промежуточной ступени таким образом, что ускорение G увеличивается. Тем не менее, поскольку только двигатель 2 служит в качестве первичного движителя, ускорение G увеличивается посредством крутящего момента Te двигателя только до уровня G40. В этой ситуации, управление помощью за счет переключения передач по-прежнему выполняется для того, чтобы увеличивать входную частоту NT вращения посредством первого электромотора 3, в силу этого переключение передач "вниз" с промежуточной ступени на целевую ступень начинается за относительно короткое время в момент t42 времени. Как результат, ускорение G дополнительно увеличивается.
Фиг. 10b показывает ситуацию, в которой управление помощью за счет крутящего момента посредством второго электромотора 13 выполняется при переключении ступени зубчатой передачи с промежуточной ступени на целевую ступень при вышеуказанном условии, в дополнение к управлению помощью за счет переключения передач посредством первого электромотора 3. В этом случае, поскольку управление помощью за счет переключения передач выполняется для того, чтобы повышать входную частоту NT вращения, в качестве примера, показанного на фиг. 10a, ступень зубчатой передачи переключается на промежуточную ступень приблизительно в момент t41 времени за относительно короткое время. В этой ситуации, управление помощью за счет переключения передач посредством первого электромотора 3 завершается, и в силу этого выходной крутящий момент Tmg1 первого электромотора 3 уменьшается до нуля. Одновременно, электричество, потребляемое посредством первого электромотора 3 до сих пор, подается во второй электромотор 13 таким образом, что выходной крутящий момент Tmg2 второго электромотора 13 увеличивается. Таким образом, управление помощью за счет крутящего момента посредством второго электромотора 13 выполняется. Следовательно, транспортное средство 1 приводится в движение посредством движущей силы, устанавливаемой посредством крутящего момента Te двигателя, умноженного на передаточное отношение промежуточной ступени, и выходного крутящего момента Tmg2, суммированного с крутящим моментом Te двигателя. Как результат, ускорение G увеличивается до уровня G41, который выше вышеуказанного уровня G40 для случая, в котором транспортное средство 1 приводится в движение только посредством двигателя 2. В этом случае, поскольку управление помощью за счет переключения передач посредством первого электромотора 3 уже завершено, увеличение входной частоты NT вращения немного задерживается по сравнению с примером, показанным на фиг. 10a. Следовательно, ступень зубчатой передачи переключается с промежуточной ступени на целевую ступень в момент t43 времени после момента t42 времени, и ускорение G дополнительно увеличивается.
В случае выполнения только управления помощью за счет переключения передач посредством первого электромотора 3, как показано на фиг. 10a, ступень зубчатой передачи переключается на промежуточную ступень за относительно короткое время таким образом, что водитель может ощущать увеличение ускорения G за относительно короткое время. Таким образом, период плато ускорения G является коротким. Тем не менее, поскольку ускорение G, устанавливаемое на промежуточной ступени, является небольшим, увеличение ускорения G временно попадает в зону плато, другими словами, ускорение G увеличивается пошагово. В этом случае, если управление помощью за счет переключения передач посредством первого электромотора 3 выполняется непрерывно во время выполнения пошагового переключения передач "вниз", операция переключения передач может не выполняться плавно, и в силу этого ощущение ускорения может уменьшаться. Следовательно, в этом случае, количественный показатель E1 оценки ощущения ускорения является низким. В отличие от этого, в примере, показанном на фиг. 10b, управление помощью за счет переключения передач посредством первого электромотора 3 выполняется в начальной фазе, чтобы убыстрять переключение передач "вниз" на промежуточную ступень, и затем управление помощью за счет крутящего момента посредством второго электромотора 13 выполняется во время выполнения переключения передач "вниз" с промежуточной ступени на целевую ступень. В этом случае, водитель может ощущать увеличение ускорения G за относительно короткое время при переключении на промежуточную ступень. Помимо этого, ускорение G увеличивается в достаточной степени на промежуточной ступени. Следовательно, в этом случае, ускорение G может увеличиваться быстро и в достаточной степени в ответ на нажатие ACC педали акселератора. По этим причинам, количественный показатель оценки E2 в примере, показанном на фиг. 10b, выше количественного показателя E1 оценки в примере, показанном на фиг. 10a (E2>E1).
Хотя описан вышеуказанный примерный вариант осуществления настоящего изобретения, специалисты в данной области техники должны понимать, что настоящее изобретение не должно быть ограничено описанным примерным вариантом осуществления, и различные изменения и модификации могут вноситься в пределах объема настоящего изобретения. Например, недостаточность выходного крутящего момента второго электромотора 13 для того, чтобы достигать требуемой движущей силы, также может задаваться на основе уровня SOC устройства 14 накопления электричества. В этом случае, этап S30, показанный на фиг. 11, выполняется вместо вышеприведенных этапов S3 и S5. В частности, на этапе S30 определяется то, ниже или нет уровень SOC устройства 14 накопления электричества предварительно определенного уровня α. Если уровень SOC устройства 14 накопления электричества ниже предварительно определенного уровня α таким образом, что ответ этапа S30 представляет собой "Да", процедура переходит к этапу S6, чтобы выполнять управление помощью за счет переключения передач посредством первого электромотора 3, и после этого возвращается. В отличие от этого, если уровень SOC устройства 14 накопления электричества выше предварительно определенного уровня α таким образом, что ответ этапа S30 представляет собой "Нет", процедура переходит к этапу S4, чтобы выполнять управление помощью за счет крутящего момента посредством второго электромотора 13. Предварительно определенный уровень α может задаваться равным уровню ниже уровня, требуемого для того, чтобы формировать максимальный доступный выходной крутящий момент второго электромотора 13. Например, предварительно определенный уровень α может задаваться равным уровню, на котором второму электромотору 13 разрешается формировать требуемый крутящий момент для того, чтобы выполнять управление помощью за счет крутящего момента при ускорении транспортного средства 1. Если предварительно определенный уровень α задается равным вышеописанному уровню, ощущение ускорения может не увеличиваться посредством управления помощью за счет крутящего момента посредством второго электромотора 13 в случае, если уровень SOC ниже предварительно определенного уровня α. Следовательно, в этом случае, управление помощью за счет переключения передач посредством первого электромотора 3 выполняется вместо управления помощью за счет крутящего момента посредством второго электромотора 13. Как описано выше, первый электромотор 3 работает главным образом в качестве генератора, и в силу этого его производительность меньше производительности второго электромотора 13. Помимо этого, чтобы увеличивать входную частоту NT вращения, требуемый крутящий момент первого электромотора 3 меньше требуемого крутящего момента второго электромотора 13. По этим причинам, выполнение переключения передач "вниз" может стимулироваться посредством выполнения управления помощью за счет переключения передач посредством первого электромотора 3, чтобы увеличивать ускорение быстро. Следовательно, ощущение ускорения может быть улучшено.
Помимо этого, управление помощью за счет переключения передач посредством первого электромотора 3 и управление помощью за счет крутящего момента посредством второго электромотора 13 также могут выполняться избирательно в ходе приведения в движение в так называемом последовательном гибридном режиме (или EV-режиме), в котором первый электромотор 3 работает в качестве генератора посредством двигателя 2, и второй электромотор 13 работает в качестве электромотора посредством электричества, вырабатываемого посредством первого электромотора 3, чтобы приводить в движение транспортное средство 1. В этом случае, второму электромотору 13 разрешается формировать крутящий момент в достаточной степени, если скорость транспортного средства является низкой. Следовательно, ускорение транспортного средства 1 может увеличиваться в достаточной степени посредством увеличения выходного крутящего момента второго электромотора 13, когда требуемая движущая сила увеличивается. В отличие от этого, если скорость транспортного средства является высокой, выходной крутящий момент второго электромотора 13 потребляется, чтобы приводить в движение транспортное средство 1, и в силу этого доступный крутящий момент второго электромотора 13 является небольшим. Следовательно, в этом случае, входная частота NT вращения повышается быстро посредством обеспечения работы первого электромотора 3 в качестве электромотора. Как результат, выполнение переключения передач "вниз" стимулируется, чтобы уменьшать период плато ускорения, за счет этого улучшая ощущение ускорения.
Дополнительно, система управления согласно варианту осуществления также может применяться к гибридному транспортному средству с передним приводом или с задним приводом. В случае применения системы управления к этим видам гибридных транспортных средств с приводом на два колеса, второй электромотор 13 может соединяться с ведущими колесами без размещения автоматической трансмиссии между ними.
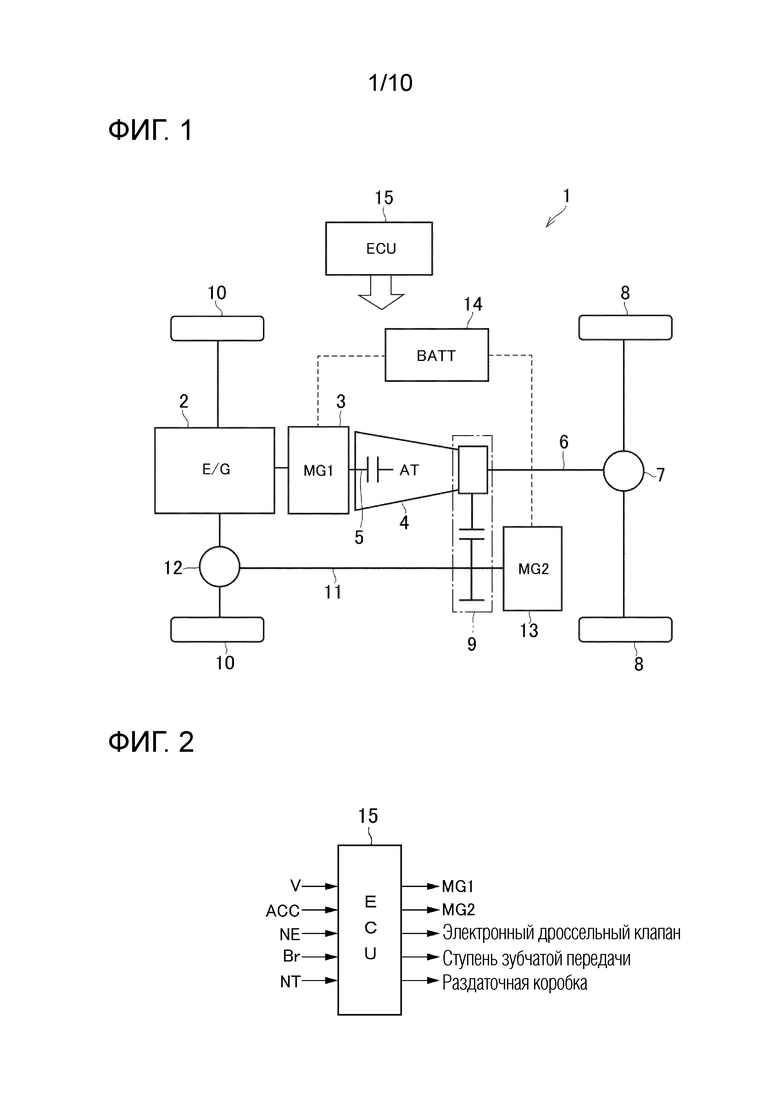
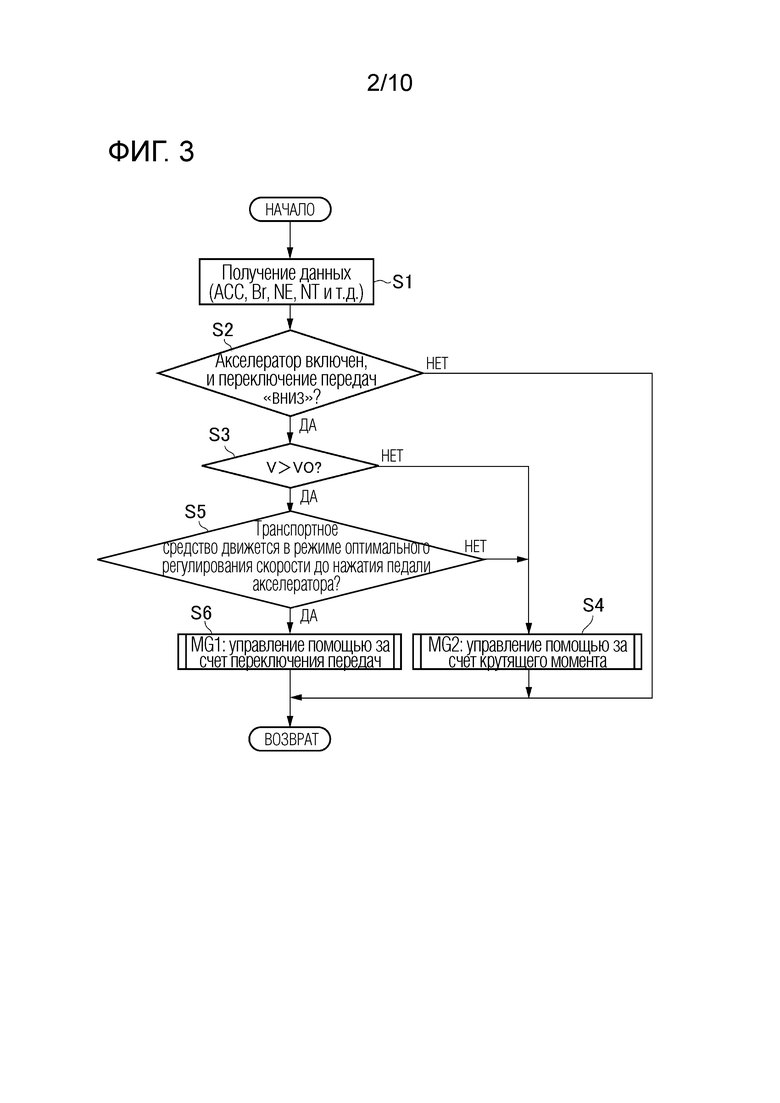
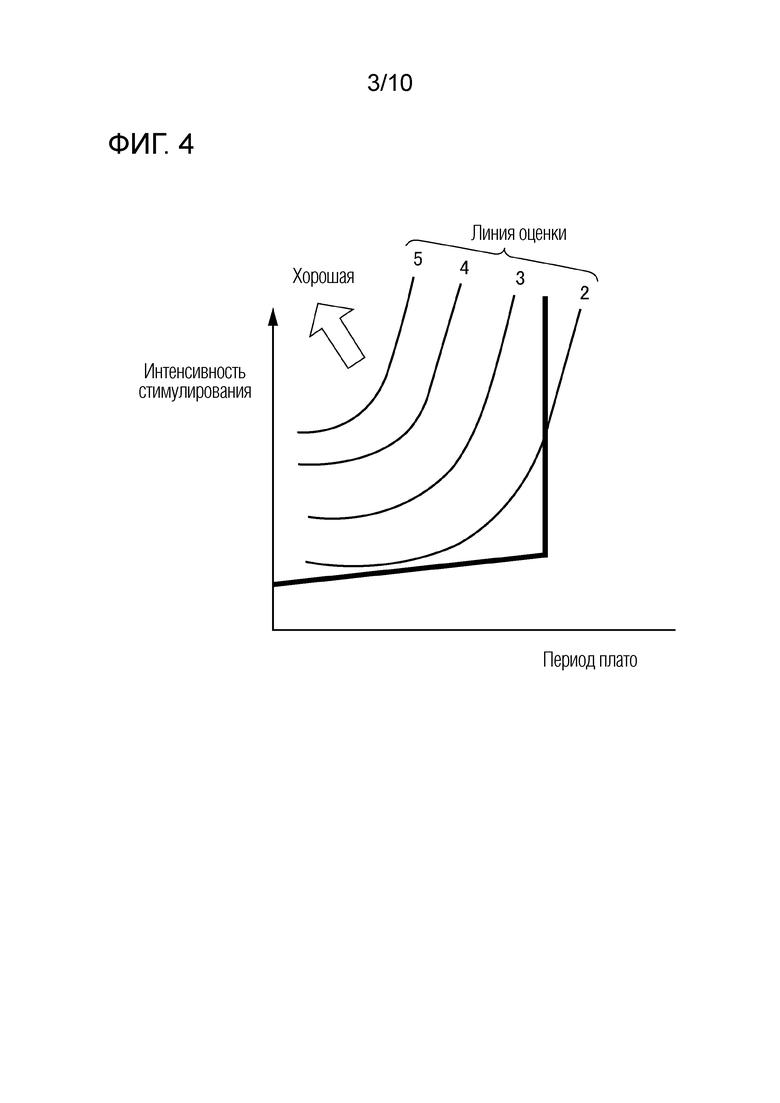
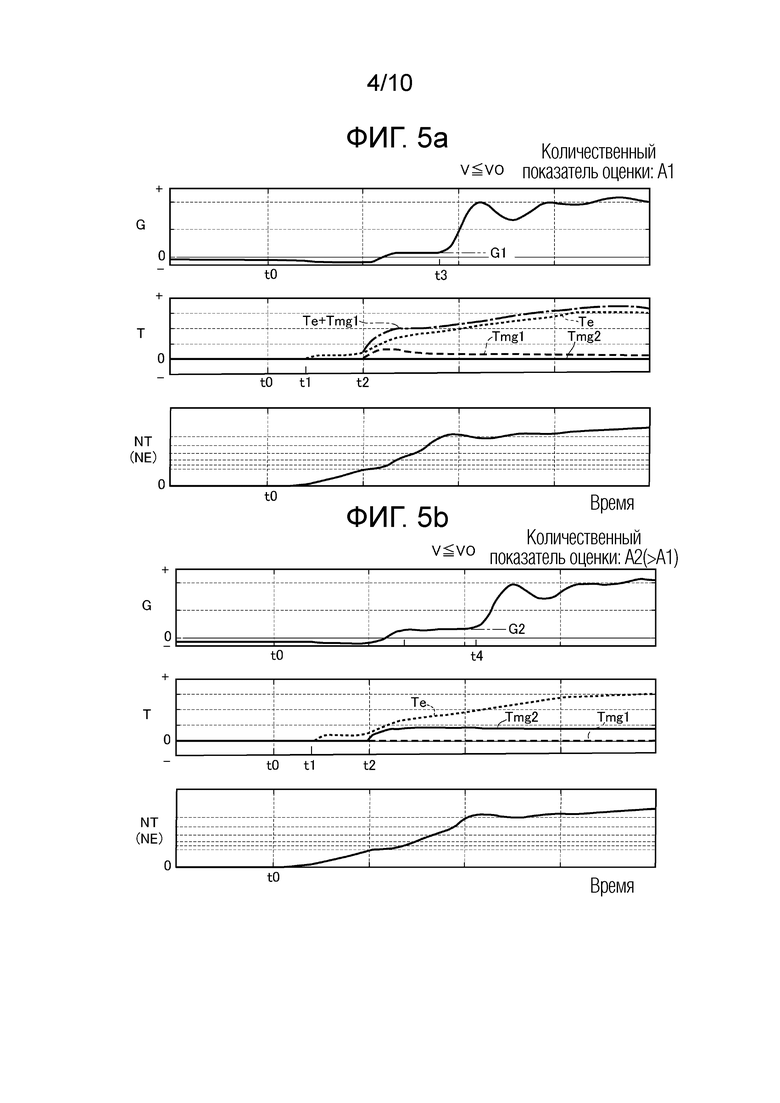
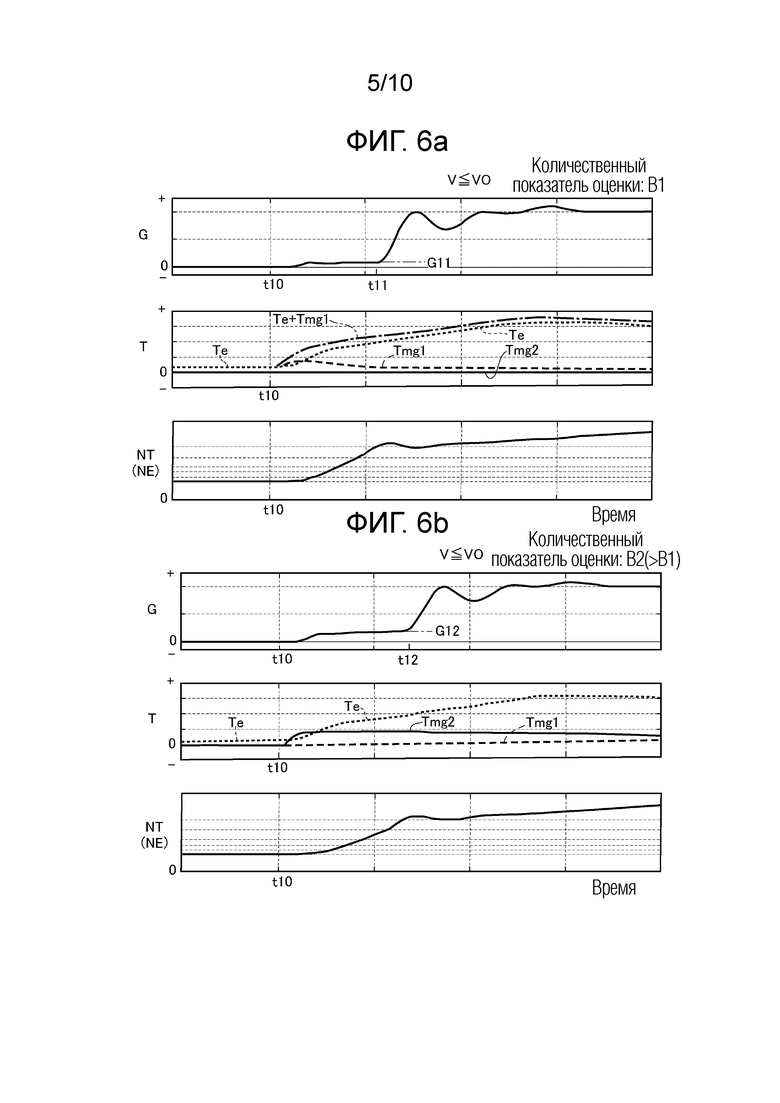
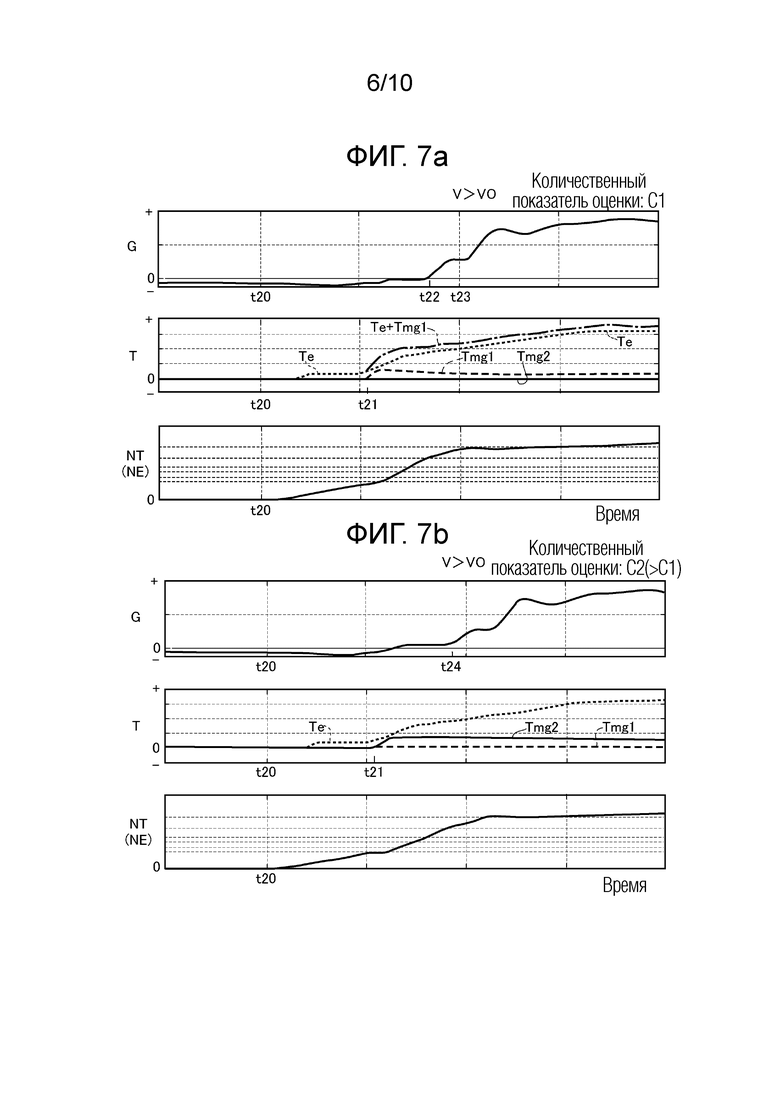
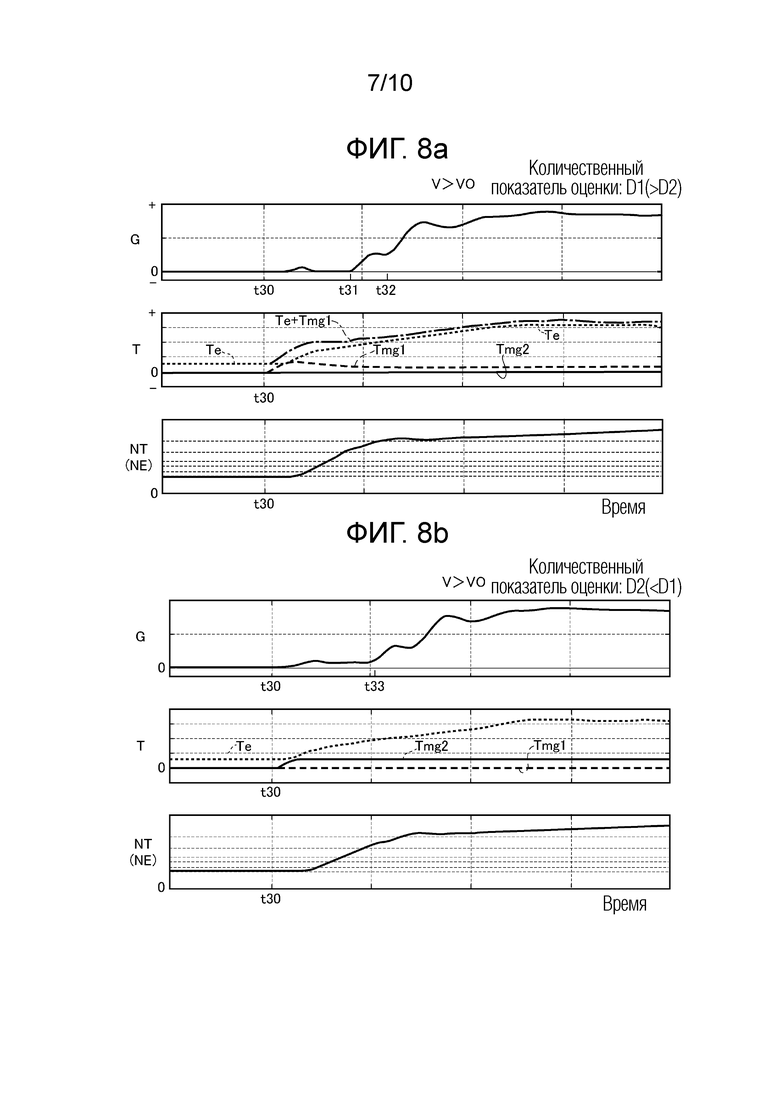

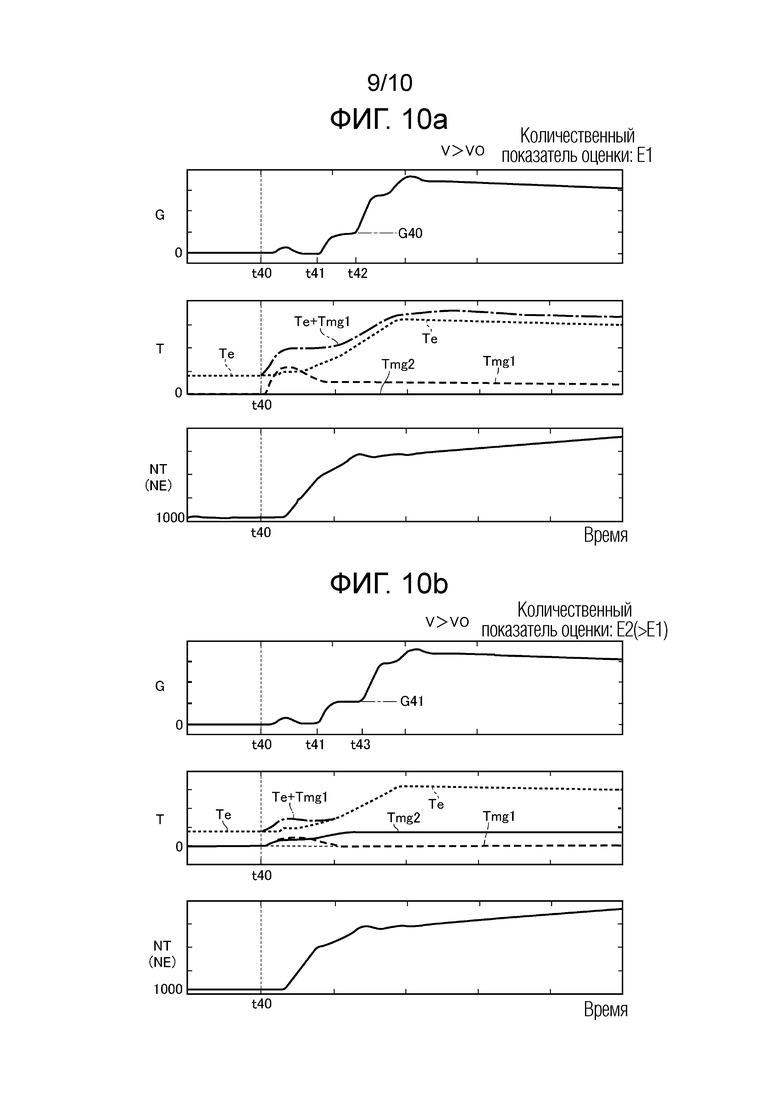
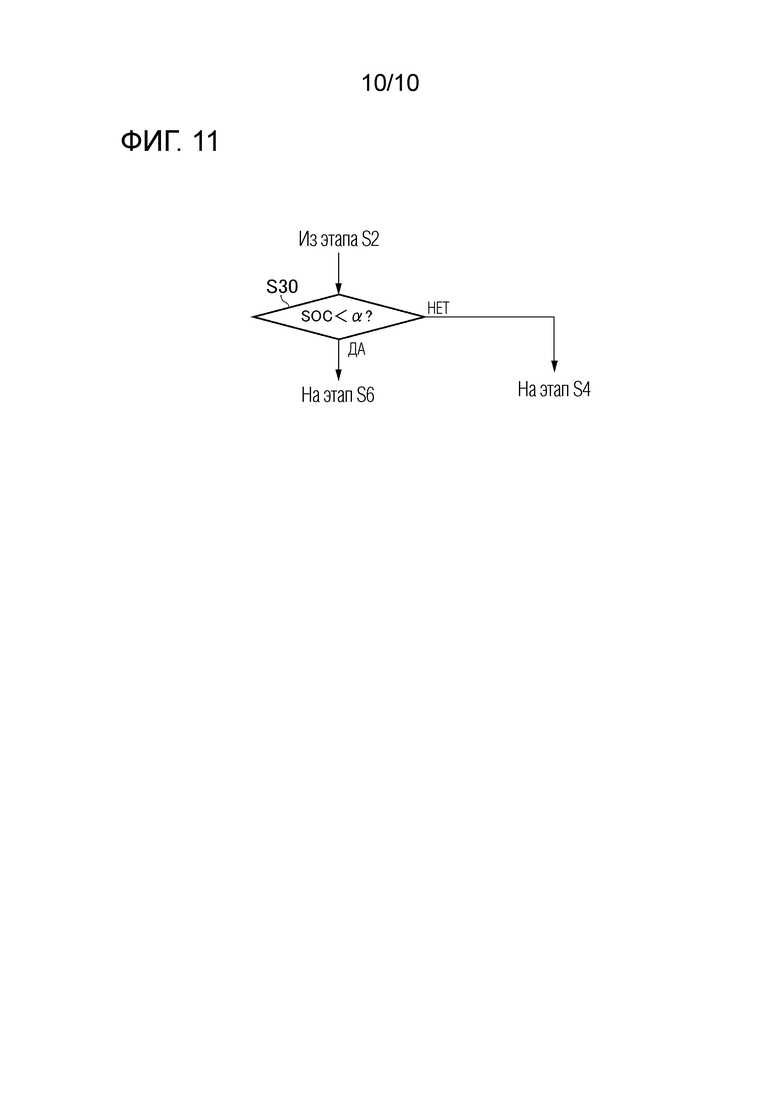
Изобретение относится к гибридным транспортным средствам. Система управления приводом гибридного транспортного средства, в котором двигатель и первый электромотор соединены с входной стороной автоматической трансмиссии и второй электромотор соединен с ведущими колесами, содержит контроллер, который управляет первым и вторым электромоторами. Контроллер вычисляет требуемую движущую силу и выполняет управление помощью, чтобы повышать входную частоту вращения для автоматической трансмиссии посредством первого электромотора, и второе управление помощью, чтобы увеличивать выходной крутящий момент второго электромотора. Улучшается ускорение транспортного средства. 9 з.п. ф-лы, 11 ил., 1 табл.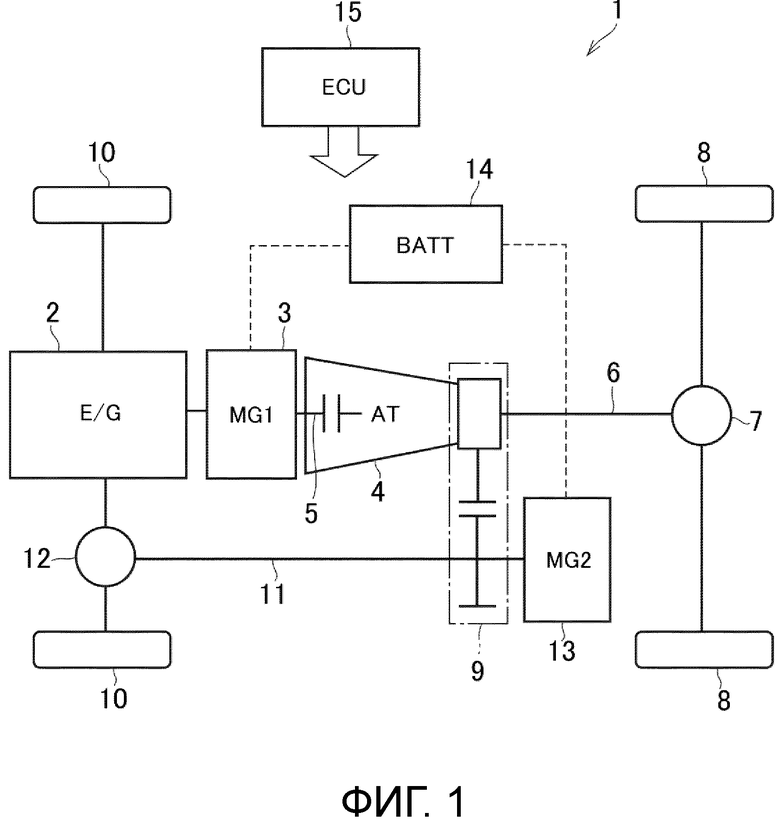
1. Система управления приводом гибридного транспортного средства, в котором двигатель и первый электромотор соединены с входной стороной автоматической трансмиссии и второй электромотор соединен с ведущими колесами, содержащая:
контроллер, который управляет первым электромотором и вторым электромотором,
при этом контроллер выполнен с возможностью:
- вычисления требуемой движущей силы и
- выполнения избирательного управления для избирательного выполнения первого управления помощью, чтобы повышать входную частоту вращения для автоматической трансмиссии посредством первого электромотора, и второго управления помощью, чтобы увеличивать выходной крутящий момент второго электромотора, таким образом увеличивая движущую силу, чтобы приводить в движение гибридное транспортное средство, на основе требуемой движущей силы.
2. Система управления для гибридного транспортного средства по п. 1, в которой контроллер дополнительно выполнен с возможностью:
- выполнения определения требуемого ускорения, чтобы определять то, намеревается или нет водитель ускорять гибридное транспортное средство,
- выполнения определения движущей силы на предмет того, является или нет выходной крутящий момент, который может формироваться посредством второго электромотора, недостаточным для того, чтобы достигать требуемой движущей силы, чтобы ускорять гибридное транспортное средство после выполнения определения требуемого ускорения,
- выбора первого управления помощью, когда выходной крутящий момент, который может формироваться посредством второго электромотора, является недостаточным для того, чтобы достигать требуемой движущей силы, и
- выбора второго управления помощью, когда второму электромотору разрешается формировать выходной крутящий момент для того, чтобы достигать требуемой движущей силы.
3. Система управления для гибридного транспортного средства по п. 2, в которой
определение требуемого ускорения выполняется на основе увеличения требуемой движущей силы и удовлетворения, чтобы выполнять переключение передач "вниз" автоматической трансмиссии, и
первое управление помощью выполняется для того, чтобы способствовать выполнению переключения передач "вниз" посредством повышения входной частоты вращения посредством первого электромотора.
4. Система управления для гибридного транспортного средства по п. 2 или 3, в которой определение движущей силы выполняется на основе того факта, что скорость гибридного транспортного средства выше опорной скорости.
5. Система управления для гибридного транспортного средства по п. 2 или 3, в которой определение движущей силы включает в себя определение того, выше или нет скорость гибридного транспортного средства опорной скорости, и того, является или нет требуемая движущая сила постоянной для того, обеспечивать движение в режиме оптимального регулирования скорости гибридного транспортного средства непосредственно перед тем, как ускорение запрашивается.
6. Система управления для гибридного транспортного средства по п. 2 или 3, дополнительно содержащая:
устройство накопления электричества, которое подает электричество в первый электромотор и второй электромотор,
при этом определение движущей силы включает в себя определение того, ниже или нет уровень заряда устройства накопления электричества уровня, на котором второму электромотору разрешается вырабатывать требуемую мощность, чтобы выполнять второе управление помощью.
7. Система управления для гибридного транспортного средства по любому из пп. 1-3, в которой контроллер дополнительно выполнен с возможностью запрещения выполнения второго управления помощью посредством второго электромотора во время выполнения первого управления помощью посредством первого электромотора.
8. Система управления для гибридного транспортного средства по любому из пп. 1-3, в которой контроллер дополнительно выполнен с возможностью прекращения подачи электрической мощности во второй электромотор при повышении входной частоты вращения посредством первого электромотора.
9. Система управления для гибридного транспортного средства по п. 2, в которой контроллер дополнительно выполнен с возможностью:
- определения того, представляет собой переключение передач "вниз", которое должно выполняться в ответ на увеличение требуемого ускорения, или нет пошаговое переключение передач для того, чтобы переключать ступень зубчатой передачи автоматической трансмиссии на целевую ступень, которая находится на две или более ступеней ниже текущей ступени, через промежуточную ступень,
- выполнения первого управления помощью, чтобы способствовать выполнению переключения передач "вниз" посредством повышения входной частоты вращения для автоматической трансмиссии посредством первого электромотора до завершения переключения передач "вниз", если выполнение пошагового переключения передач определяется, и
- выполнения второго управления помощью, чтобы приводить в действие второй электромотор при переключении ступени зубчатой передачи с промежуточной ступени на целевую ступень.
10. Система управления для гибридного транспортного средства по любому из пп. 1-3 и 9, в которой
гибридное транспортное средство содержит передние колеса, с которыми соединен второй электромотор, задние колеса, на которые передается крутящий момент от автоматической трансмиссии, и раздаточную коробку, которая передает крутящий момент, полученный от автоматической трансмиссии, на передние колеса, и
второй электромотор соединен с раздаточной коробкой.
| JP 3707258 B2, 19.10.2005 | |||
| JP 2017048916 А, 09.03.2017 | |||
| JP 2017155779 А, 07.09.2017 | |||
| ФИЛЬКИН Н.М | |||
| ГИБРИДНЫЙ АВТОМОБИЛЬ | |||
| ОСНОВЫ ПРОЕКТИРОВАНИЯ, КОНСТРУИРОВАНИЯ И РАСЧЕТА | |||
| УЧЕБНОЕ ПОСОБИЕ / Н.М.ФИЛЬКИН, В.А.УМНЯШКИН, Р.С.МУЗАФАРОВ | |||
| - М | |||
| : ФОРУМ : ИНФРА-М, 2017 | |||
| Русская печь | 1919 |
|
SU240A1 |
| - (ВЫСШЕЕ ОБРАЗОВАНРИЕ | |||
| БАКАЛАВРИАТ) | |||
| ОВСЯННИКОВ Е.М | |||
| БОРТОВЫЕ ИСТОЧНИКИ И | |||

