Область техники
Варианты осуществления настоящего изобретения относятся к области техники системы управления переключением частоты вращения для транспортного средства, содержащего электромотор в качестве первичного движителя и трансмиссию.
Уровень техники
В публикации US 2009/0227417 A1 описано оборудование управления для гибридного транспортного средства, содержащее: дифференциальный механизм, имеющий первый вращательный элемент, соединенный с двигателем, второй вращательный элемент, соединенный с первым электромотором, и третий вращательный элемент, соединенный с выходным элементом; и шестеренчатую трансмиссию, соединенную с третьим вращательным элементом дифференциального механизма. Шестеренчатая трансмиссия содержит множество муфт и тормозов, каждый из которых приводится в действие посредством гидравлического актуатора. Согласно идее US 2009/0227417 A1, линия переключения передач, задающая ступени шестерен трансмиссии, изменяется таким образом, чтобы определять выполнение операции переключения передач трансмиссии, когда отклик актуатора является относительно медленным вследствие низкой температуры масла.
Согласно идее US 2009/0227417 A1, частота вращения двигателя может регулироваться оптимизированным топливоэкономичным способом посредством выполнения операции переключения передач посредством управления дифференциальным механизмом и трансмиссией в соответствии с требуемой движущей силой и скоростью транспортного средства. Тем не менее, изменение поведения транспортного средства вызывается, по меньшей мере, в небольшой степени в результате выполнения операции переключения передач. Например, частота вращения двигателя будет изменяться посредством выполнения операции переключения передач, и водитель будет испытывать некомфортное ощущение, если операция переключения передач выполняется часто. Такое изменение поведения транспортного средства, получающееся в результате выполнения операции переключения передач, также может возникать в электротранспортном средстве, в котором только электромотор используется в качестве первичного движителя.
Сущность изобретения
Аспекты вариантов осуществления настоящего изобретения задуманы с учетом вышеприведенных технических проблем, и в силу этого цель настоящего раскрытия сущности заключается в том, чтобы предоставлять систему управления переключением частоты вращения для транспортного средства, выполненную с возможностью подавлять изменение поведения транспортного средства, получающееся в результате выполнения операции переключения частоты вращения трансмиссии, и предотвращать уменьшение эффективности использования энергии, которое в ином случае может возникать, если операция переключения частоты вращения не выполняется.
Система управления переключением частоты вращения согласно примерному варианту осуществления настоящего раскрытия сущности применяется к транспортному средству, содержащему: трансмиссию; ведущее колесо, которое соединяется с трансмиссией; электромотор, в котором, по меньшей мере, любое из крутящего момента и частоты вращения изменяется посредством изменения передаточного отношения трансмиссии; и устройство накопления электричества, которое соединяется с электромотором. Чтобы достигать вышеописанных целей, согласно примерному варианту осуществления настоящего раскрытия сущности, система управления переключением частоты вращения содержит контроллер, который управляет трансмиссией. В частности, контроллер выполнен с возможностью: выбирать режим переключения передач трансмиссии из первого режима, в котором передаточное отношение трансмиссии изменяется в соответствии с рабочим состоянием транспортного средства, и второго режима, в котором передаточное отношение трансмиссии задается фиксировано равным заданному отношению; и выбирать первый режим в случае, если уровень заряда устройства накопления электричества ниже заданного уровня, и выбирать второй режим в случае, если уровень заряда устройства накопления электричества равен или выше заданного уровня.
В неограничивающем варианте осуществления, второй режим может включать в себя режим, в котором передаточное отношение трансмиссии задается фиксировано равным заданному отношению в случае, если скорость транспортного средства ниже заданного уровня, и передаточное отношение трансмиссии изменяется в случае, если скорость транспортного средства равна или выше заданного уровня.
В неограничивающем варианте осуществления, контроллер может быть дополнительно выполнен с возможностью: выбирать режим переключения передач из нормального режима переключения передач, в котором передаточное отношение трансмиссии управляется в соответствии со скоростью транспортного средства и требуемой движущей силой таким образом, что эффективность использования системы оптимизируется, и адаптивного режима, в котором передаточное отношение трансмиссии управляется таким образом, что изменение поведения транспортного средства уменьшается; адаптивный режим включает в себя первый режим и второй режим; и первый режим включает в себя режим, в котором, по меньшей мере, любое одно из передаточных отношений, доступных в нормальном режиме переключения передач, запрещается.
В неограничивающем варианте осуществления, контроллер может быть дополнительно выполнен с возможностью: вычислять величину увеличения потерь энергии, получающихся в результате приведения в движение транспортного средства в адаптивном режиме; вычислять разность между величиной рекуперативной энергии от электромотора в случае поддержания текущего передаточного отношения во время замедления транспортного средства и величиной рекуперативной энергии от электромотора в случае изменения передаточного отношения трансмиссии, чтобы увеличивать рекуперативную энергию; разрешать выполнение операции переключения частоты вращения трансмиссии во время замедления транспортного средства в случае, если разность между рекуперативными энергиями превышает величину увеличения потерь энергии; и запрещать выполнение операции переключения частоты вращения трансмиссии во время замедления транспортного средства в случае, если разность между рекуперативными энергиями меньше величины увеличения потерь энергии.
В неограничивающем варианте осуществления, контроллер может быть дополнительно выполнен с возможностью задавать передаточное отношение трансмиссии равным отношению, идентичному отношению в нормальном режиме переключения передач во время замедления транспортного средства, в случае если выполнение операции переключения частоты вращения трансмиссии разрешается во время замедления транспортного средства.
В неограничивающем варианте осуществления, электромотор может соединяться со входной стороной трансмиссии.
В неограничивающем варианте осуществления, система управления переключением частоты вращения дополнительно может содержать другой первичный движитель, который соединяется со входной стороной трансмиссии. В этом случае, электромотор может соединяться с трактом передачи крутящего момента между трансмиссией и ведущим колесом.
Таким образом, согласно примерному варианту осуществления настоящего раскрытия сущности, первый режим, в котором передаточное отношение трансмиссии изменяется в соответствии с рабочим состоянием транспортного средства, выбирается в случае, если уровень заряда устройства накопления электричества ниже заданного уровня. В силу этого, согласно примерному варианту осуществления настоящего раскрытия сущности, эффективность использования энергии не должна уменьшаться чрезмерно, когда операция переключения частоты вращения не выполняется. В отличие от этого, второй режим, в котором передаточное отношение трансмиссии задается фиксировано равным заданному отношению, выбирается в случае, если уровень заряда устройства накопления электричества равен или выше заданного уровня. В силу этого, согласно примерному варианту осуществления настоящего раскрытия сущности, изменение поведения транспортного средства, получающееся в результате выполнения операции переключения частоты вращения, может подавляться, чтобы уменьшать некомфортное ощущение пассажира. Таким образом, система управления переключением частоты вращения определяет выполнение операции переключения частоты вращения в зависимости от уровня заряда устройства накопления электричества. В силу этого, согласно примерному варианту осуществления настоящего раскрытия сущности, операция переключения частоты вращения может выполняться при уменьшении изменения поведения транспортного средства, а также предотвращении уменьшения эффективности использования энергии.
Краткое описание чертежей
Признаки, аспекты и преимущества примерных вариантов осуществления настоящего изобретения должны лучше пониматься со ссылкой на нижеприведенное описание и прилагаемые чертежи, которые не должны ограничивать изобретение каким-либо образом.
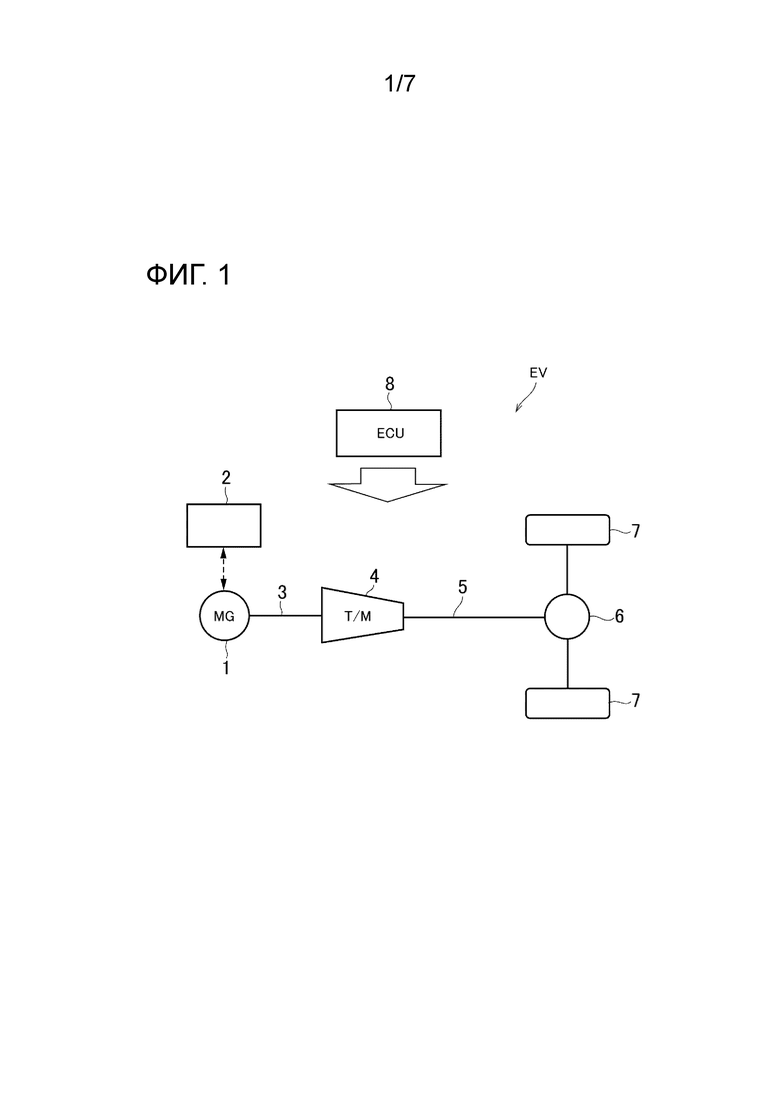
Фиг. 1 является схематичной иллюстрацией, показывающей один пример конструкции транспортного средства, к которому применяется система управления переключением частоты вращения согласно варианту осуществления настоящего раскрытия сущности;
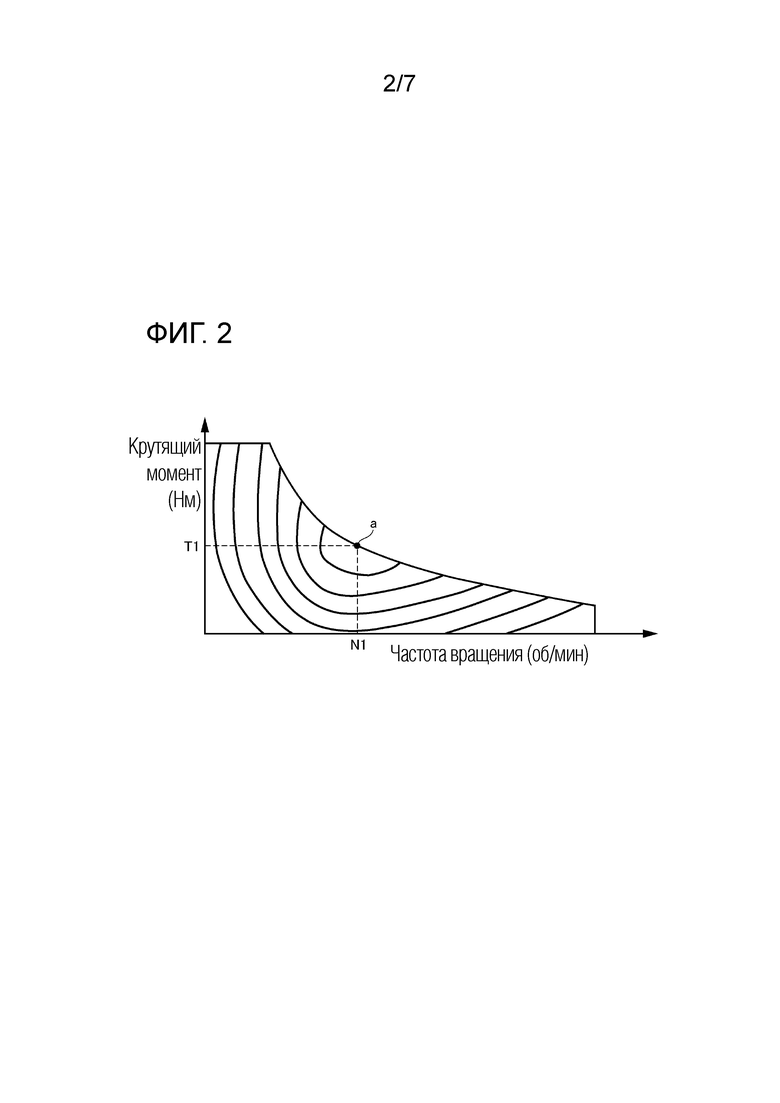
Фиг. 2 показывает карту, определяющую взаимосвязь между рабочей точкой электромотора и эффективностью использования энергии;
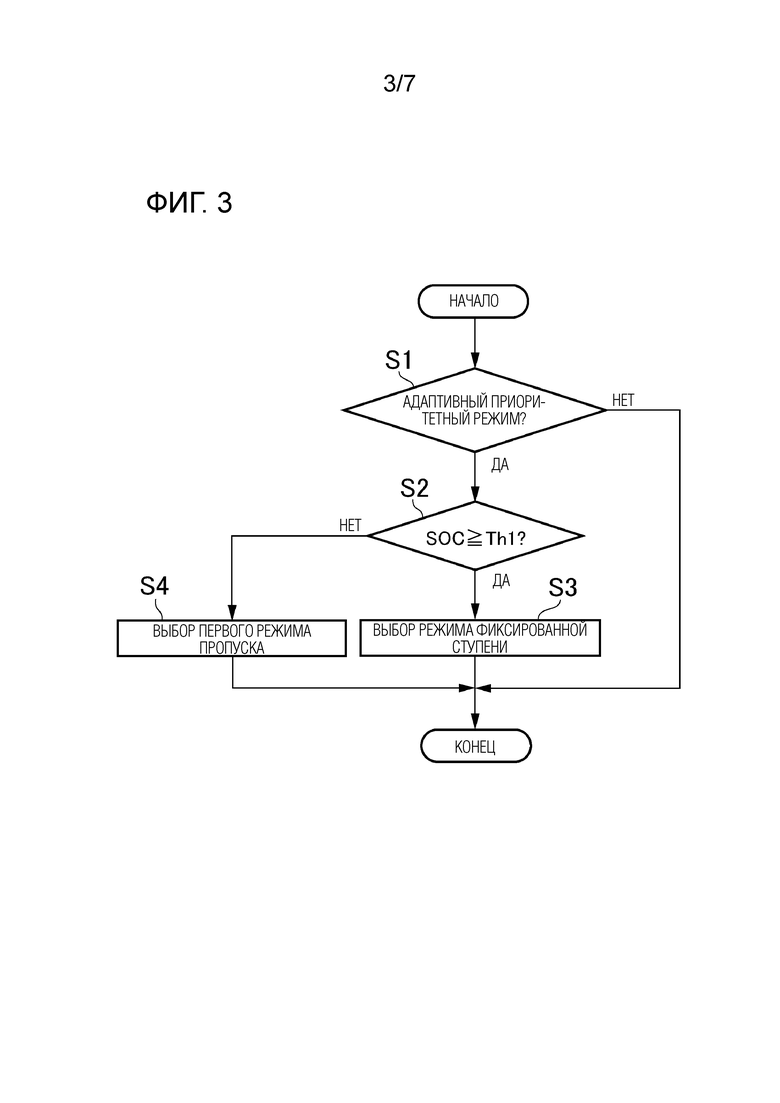
Фиг. 3 является блок-схемой последовательности операций способа, показывающей один пример процедуры, которая должна выполняться посредством системы управления переключением скоростей согласно варианту осуществления настоящего раскрытия сущности;
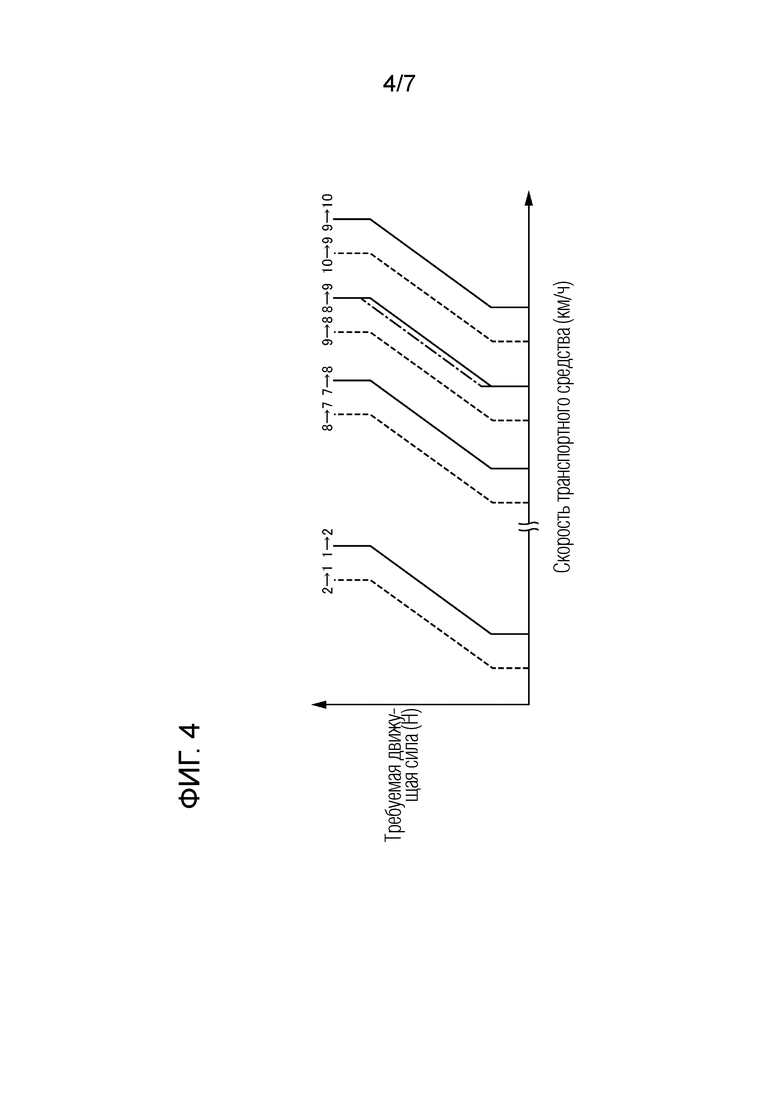
Фиг. 4 показывает один пример карты переключения передач;
Фиг. 5 является блок-схемой последовательности операций способа, показывающей один пример процедуры, которая должна выполняться посредством системы управления переключением частоты вращения, применяемой к транспортному средству, которое может приводиться в движение в диапазоне высоких скоростей;
Фиг. 6 является блок-схемой последовательности операций способа, показывающей процедуру, которая должна выполняться посредством системы управления переключением частоты вращения во время замедления транспортного средства; и
Фиг. 7 является схематичной иллюстрацией, показывающей другой пример конструкции транспортного средства, к которому применяется система управления переключением частоты вращения согласно варианту осуществления настоящего раскрытия сущности.
Подробное описание предпочтительных вариантов осуществления
Далее поясняются варианты осуществления настоящего изобретения со ссылками на прилагаемые чертежи. Система управления переключением частоты вращения согласно варианту осуществления настоящего изобретения может применяться к электротранспортному средству EV, в котором электромотор 1, имеющий функцию выработки, используется в качестве первичного движителя. Например, синхронный электромотор с постоянными магнитами может приспосабливаться в качестве электромотора 1, и электромотор 1 соединяется с устройством 2 накопления электричества, включающим в себя аккумулятор и конденсатор, через инвертор и преобразователь (ни один из которых не проиллюстрирован). Электромотор 1 может работать в качестве электромотора, чтобы формировать движущий крутящий момент посредством подачи электричества из устройства 2 накопления электричества в электромотор 1. Электромотор 1 также может работать в качестве генератора для того, чтобы формировать рекуперативный крутящий момент. В этом случае, электричество, вырабатываемое посредством электромотора 1, накапливается в устройстве 2 накопления электричества.
Шестеренчатая трансмиссия 4 (называемая "T/M" на фиг. 1) соединяется с выходным валом 3 электромотора 1. Ступень зубчатой передачи (или передаточное отношение) трансмиссии 4 может выбираться из множества ступеней различных передаточных отношений посредством манипулирования зацепляющими устройствами, включающими в себя муфту и тормоз. В транспортном средстве EV, показанном на фиг. 1, ступень переднего хода трансмиссии 4 может выбираться от первой ступени до десятой ступени.
Выходной вал 5 трансмиссии 4 соединяется с парой ведущих колес 7 через зубчатую передачу, включающую в себя блок 6 дифференциала. В транспортном средстве EV, показанном на фиг. 1, в силу этого передаточное отношение между электромотором 1 и ведущим колесом 7 может изменяться произвольно посредством переключения ступени зубчатой передачи трансмиссии 4. Другими словами, крутящий момент и частота вращения электромотора 1 могут изменяться посредством переключения ступени зубчатой передачи трансмиссии 4.
Транспортное средство EV содержит электронный модуль 8 управления (в дальнейшем сокращенно "ECU") в качестве контроллера для того, чтобы управлять электромотором 1 и трансмиссией 4. ECU 8 сконфигурирован как имеющий микрокомпьютер в качестве своей основной составляющей, и сигналы определения из различных датчиков отправляются в ECU 8. ECU 8 определяет целевую частоту вращения и целевой крутящий момент электромотора 1 на основе входных сигналов и формул, а также карт, установленных в ECU 8, и определяет целевую ступень трансмиссии 4 на основе определенной целевой частоты вращения и крутящего момента электромотора 1. Например, ECU 8 принимает сигналы определения скорости транспортного средства, частоты вращения электромотора 1, нажатия педали акселератора (не показана), нажатия педали тормоза (не показана), уровня заряда (в дальнейшем сокращенно "SOC") устройства 2 накопления электричества, температуры устройства 2 накопления электричества, температуры электромотора 1 и т.д.
Эффективность использования энергии электромотора 1 варьируется в зависимости от выходного крутящего момента и частоты вращения. Например, эффективность использования энергии электромотора 1 оптимизируется в рабочей точке a на карте, показанной на фиг. 2, в которой частота вращения электромотора 1 составляет N1, и крутящий момент электромотора 1 составляет T1. Таким образом, эффективность использования энергии электромотора 1 уменьшается с отклонением частоты вращения электромотора 1 от N1 или отклонением крутящего момента электромотора 1 от T1. Такие характеристики электромотора 1 сохраняются в ECU 8. В частности, эффективность использования энергии электромотора 1 вычисляется как выходная мощность (т.е. произведение частоты вращения и крутящего момента) электромотора 1 относительно электрической мощности, подаваемой в электромотор 1.
Трансмиссия 4 содержит множество шестерней, и частота вращения и крутящий момент каждой шестерни варьируется в зависимости от ступени зубчатой передачи. Следовательно, абсолютная величина инерционного крутящего момента каждой шестерни и потерь мощности в месте зацепления между шестернями варьируется посредством переключения ступени зубчатой передачи трансмиссии 4, и как результат, эффективность передачи мощности трансмиссии 4 должна изменяться.
По этой причине, в принципе, ступени зубчатой передачи трансмиссии 4 задаются таким образом, чтобы оптимизировать полную эффективность использования энергии системы, включающую в себя эффективность использования энергии электромотора 1 и эффективность передачи мощности трансмиссии 4.
При переключении ступени зубчатой передачи трансмиссии 4, крутящий момент, доставленный из электромотора 1 на ведущие колеса 7, временно падает, чтобы изменять поведение транспортного средства EV как результат изменения состояния(й) зацепления зацепляющего устройства. Такое изменение поведения транспортного средства EV может быть нежелательным для водителя, и водитель может испытывать некомфортное ощущение. В отличие от этого, если ступень зубчатой передачи трансмиссии 4 не переключается, такое изменение поведения транспортного средства EV может уменьшаться, но полная эффективность использования энергии транспортного средства EV также может уменьшаться, за счет этого увеличивая потребление электроэнергии.
Чтобы предотвращать такой недостаток, согласно примерному варианту осуществления, система управления переключением частоты вращения выполнена с возможностью переключать режим переключения передач между двумя режимами, чтобы различать частоту для того, чтобы выполнять операцию переключения частоты вращения, или способ определения выполнения операции переключения частоты вращения, в зависимости от уровня SOC устройства 2 накопления электричества. Один пример процедуры для переключения режима переключения передач показан на фиг. 3. Процедура, показанная на фиг. 3, устанавливается в ECU 8, и ECU 8 выполняет каждый этап процедуры, показанной на фиг. 3, на основе данных, передаваемых в ECU 8.
На этапе S1, определяется то, выбирается или нет адаптивный приоритетный режим в данный момент. Адаптивный приоритетный режим представляет собой общий термин рабочего режима транспортного средства EV, который является устойчивым к изменению поведения транспортного средства. Например, с учетом того, что рабочий режим может выбираться из множества режимов, в которых способ изменения движущего крутящего момента и способ выполнения операции переключения частоты вращения отличаются, адаптивный режим соответствует спортивному режиму, в котором движущий крутящий момент изменяется быстро в ответ на операцию с акселератором. Аналогично, в случае если пассажир перевозится посредством автономного транспортного средства, которое может работать автономно без манипулирования акселератором, тормозом, рулем вручную, пассажир может не быть устойчивым к изменению поведения транспортного средства. Следовательно, в этом случае, адаптивный режим соответствует рабочему режиму автономного транспортного средства для перевозки пассажира. В автономном транспортном средстве, существование пассажира может обнаруживаться посредством датчика давления и т.п.
Если адаптивный режим не выбирается таким образом, что ответ этапа S1 представляет собой "Нет", процедура возвращается. В этом случае, выбирается нормальный режим переключения передач. В нормальном режиме переключения передач, ступень зубчатой передачи трансмиссии 4 выбирается с обращением к карте переключения передач, которая подготавливается таким образом, чтобы оптимизировать полную эффективность использования энергии транспортного средства EV. В частности, карта переключения передач определяет линии переключения "вверх" и линии переключения "вниз", и операция переключения передач трансмиссии 4 выполняется, когда рабочая точка транспортного средства EV, регулируемая посредством скорости транспортного средства и требуемой движущей силы, сдвигается вдоль линии переключения "вверх" или линии переключения "вниз".
Один пример карты переключения передач показан на фиг. 4. На карте, показанной на фиг. 4, вертикальная ось представляет требуемую движущую силу, и горизонтальная ось представляет скорость транспортного средства, каждая пунктирная кривая представляет собой линию переключения "вниз", и каждая сплошная кривая представляет собой линию переключения "вверх". Например, переключение "вверх" трансмиссии 4 выполняется, когда скорость транспортного средства увеличивается таким образом, что рабочая точка сдвигается вдоль линии переключения "вверх" слева направо на фиг. 4, либо когда требуемая движущая сила уменьшается таким образом, что рабочая точка сдвигается вниз от верхней части на фиг. 4. Как результат, ступень зубчатой передачи трансмиссии 4 переключается на ступень зубчатой передачи на одну ступень выше текущей ступени зубчатой передачи. В отличие от этого, переключение "вниз" трансмиссии 4 выполняется, когда скорость транспортного средства уменьшается таким образом, что рабочая точка сдвигается вдоль линии переключения "вниз" справа налево на фиг. 4, либо когда требуемая движущая сила увеличивается таким образом, что рабочая точка сдвигается вверх от нижней части на фиг. 4. Как результат, ступень зубчатой передачи трансмиссии 4 переключается на ступень зубчатой передачи на одну ступень ниже текущей ступени зубчатой передачи.
В противном случае, если адаптивный режим выбирается в данный момент таким образом, что ответ этапа S1 представляет собой "Да", процедура переходит к этапу S2, чтобы определять то, равен или выше либо нет уровень SOC устройства 2 накопления электричества порогового уровня Th1. Например, пороговый уровень Th1 может задаваться равным самому нижнему уровню устройства 2 накопления электричества, допустимому предельному уровню (выше самого нижнего уровня) устройства 2 накопления электричества, при котором можно предотвращать повреждение устройства 2 накопления электричества, или требуемому уровню, на котором может обеспечиваться требуемая энергия для того, чтобы двигаться из текущего местоположения в пункт назначения. Здесь, уровень SOC устройства 2 накопления электричества может получаться, например, на основе выходного напряжения устройства 2 накопления электричества.
Если уровень SOC устройства 2 накопления электричества равен или выше порогового уровня Th1 таким образом, что ответ этапа S2 представляет собой "Да", процедура переходит к этапу S3, чтобы выбирать режим фиксированной ступени, соответствующий второму режиму примерного варианта осуществления, и после этого возвращается. В режиме фиксированной ступени, ступень зубчатой передачи трансмиссии 4 фиксируется как заданная ступень. Таким образом, операция переключения передач трансмиссии 4 запрещается. Согласно примерному варианту осуществления, в частности, ступень зубчатой передачи трансмиссии 4 фиксируется как первая ступень переднего хода в режиме фиксированной ступени. В режиме фиксированной ступени, крутящий момент электромотора 1 управляется в соответствии с требуемой движущей силой.
В отличие от этого, если уровень SOC устройства 2 накопления электричества ниже порогового уровня Th1 таким образом, что ответ этапа S2 представляет собой "Нет", процедура переходит к этапу S4, чтобы выбирать первый режим пропуска, соответствующий первому режиму примерного варианта осуществления, и после этого возвращается. В первом режиме пропуска, число выбираемых ступеней зубчатой передачи уменьшается по сравнению с нормальным режимом переключения передач. Согласно примерному варианту осуществления, в частности, только нечетные ступени переднего хода, такие как первая ступень, третья ступень, пятая ступень, седьмая ступень и девятая ступень, доступны в первом режиме пропуска. В этом случае, даже если рабочая точка сдвигается вдоль линии переключения "вверх" или линии переключения "вниз" ступени зубчатой передачи, запрещенной в первом режиме пропуска, команда переключения передач не должна передаваться. Необязательно, может подготавливаться другая карта переключения передач, которая должна использоваться в первом режиме пропуска.
Первый режим пропуска выбирается, чтобы подавлять увеличение потребления электроэнергии при подавлении изменения поведения транспортного средства EV, получающегося в результате выполнения операции переключения передач. Тем не менее, для пассажира затруднительно считывать изменение поведения транспортного средства EV, получающееся в результате выполнения операции переключения передач во время приведения в движение на высокой скорости. Следовательно, только вторая ступень переднего хода также может запрещаться в первом режиме пропуска вместо запрета всех четных ступеней переднего хода. Таким образом, в первом режиме пропуска, по меньшей мере, любая одна из ступеней зубчатой передачи (или передаточных отношений), доступных в нормальном режиме переключения передач, запрещается.
В первом режиме пропуска, операция переключения передач может выполняться таким образом, чтобы переключать ступень зубчатой передачи на целевую ступень через запрещенную ступень, и в этом случае, ширина варьирования передаточного отношения увеличивается по сравнению с нормальным режимом переключения передач. Следовательно, изменение поведения транспортного средства EV должно увеличиваться. В силу этого, в первом режиме пропуска, выполнение операции переключения передач может осуществляться на основе значения требуемой движущей силы, вычисленного посредством суммирования заданного значения с требуемой движущей силой, полученной, например, на основе нажатия педали акселератора, при одновременном обращении к карте переключения передач для нормального режима переключения передач. Например, определение выполнять операцию переключения передач с восьмой ступени переднего хода на девятую ступень переднего хода выполняется, когда скорость транспортного средства увеличивается вдоль штрихпунктирной линии, показанной на фиг. 4, либо когда требуемая движущая сила уменьшается вдоль штрихпунктирной линии, показанной на фиг. 4. Другими словами, выполнение операции переключения передач осуществляется раньше по сравнению с нормальным режимом переключения передач, за счет этого уменьшая изменение поведения транспортного средства EV.
Таким образом, в случае если уровень SOC устройства 2 накопления электричества равен или выше порогового уровня Th1 в адаптивном приоритетном режиме, изменение поведения транспортного средства EV, получающееся в результате выполнения операции переключения передач, может уменьшаться посредством выбора режима фиксированной ступени. В отличие от этого, в случае если уровень SOC устройства 2 накопления электричества ниже порогового уровня Th1 в адаптивном приоритетном режиме, частота выполнения операции переключения передач может уменьшаться посредством выбора первого режима пропуска. В этом случае, чрезмерное уменьшение эффективности использования энергии также может предотвращаться без выполнения операции переключения передач. В силу этого, согласно примерному варианту осуществления, операция переключения передач может выполняться при уменьшении изменения поведения транспортного средства EV, а также предотвращении уменьшения эффективности использования энергии.
Как описано выше, для пассажира затруднительно считывать изменение поведения транспортного средства EV, получающееся в результате выполнения операции переключения передач во время приведения в движение на высокой скорости. Следовательно, с учетом того, что транспортное средство EV представляет собой спортивный автомобиль, который может приводиться в движение в диапазоне высоких скоростей, может разрешаться выполнение операции переключения передач в диапазоне высоких скоростей, даже если уровень SOC устройства 2 накопления электричества равен или выше порогового уровня Th1.
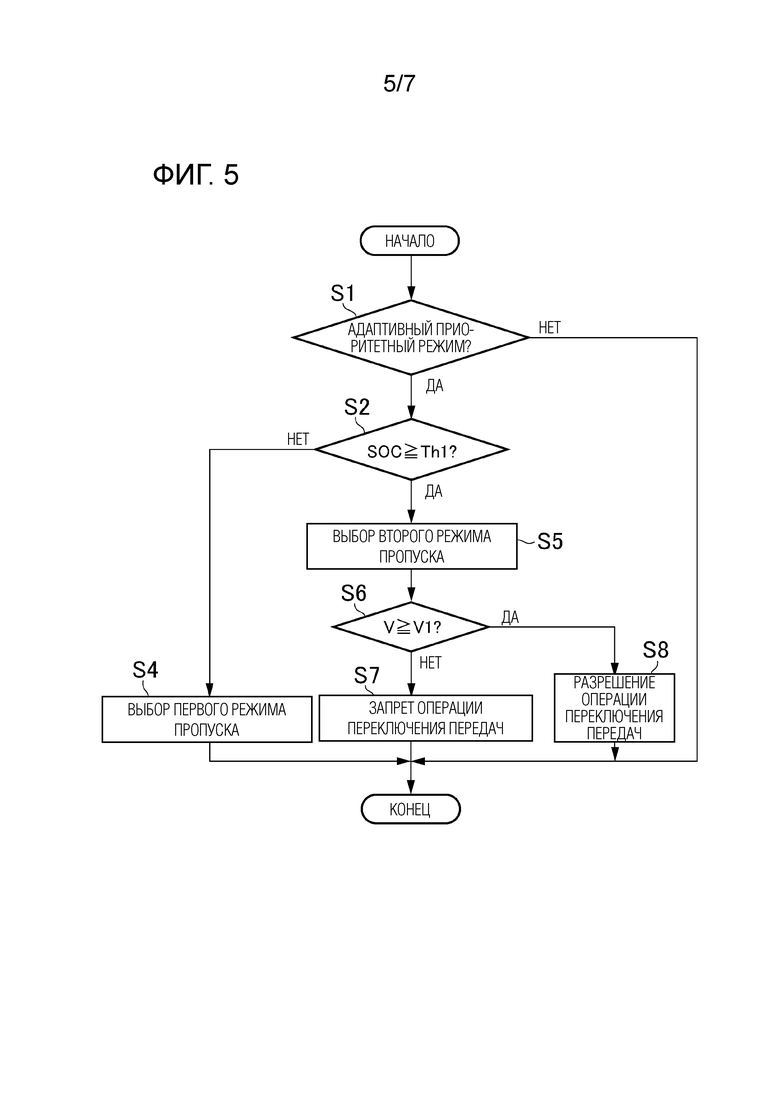
С этой целью, система управления переключением частоты вращения согласно примерному варианту осуществления дополнительно выполнена с возможностью выполнять процедуру, показанную на фиг. 5. На фиг. 5, общие номера этапов назначаются этапам, общим с этапами процедуры, показанной на фиг. 3. В процедуре, показанной на фиг. 5, если уровень SOC устройства 2 накопления электричества равен или выше порогового уровня Th1 таким образом, что ответ этапа S2 представляет собой "Да", процедура переходит к этапу S5, чтобы выбирать второй режим пропуска, также соответствующий второму режиму примерного варианта осуществления. Во втором режиме пропуска, число выбираемых ступеней зубчатой передачи (или передаточных отношений) меньше числа в первом режиме пропуска. Здесь, поясняется доступность выполнения операции переключения передач после этапа S6 для удобства.
Затем на этапе S6 определяется то, равна или выше либо нет скорость V транспортного средства заданной скорости V1. Например, заданная скорость V1 может задаваться равной уровню, соответствующему верхней предельной скорости транспортного средства, при котором верхняя предельная скорость задается равной относительно низкой скорости. Вместо этого, заданная скорость V1 также может задаваться равной уровню, при котором для пассажира затруднительно считывать изменение поведения транспортного средства EV, получающееся в результате выполнения операции переключения передач. Такой уровень скорости может определяться на основе результата эксперимента.
Если скорость V транспортного средства ниже заданной скорости V1 таким образом, что ответ этапа S6 представляет собой "Нет", процедура переходит к этапу S7, чтобы запрещать выполнение операции переключения передач, и после этого возвращается. В этом случае, ступень зубчатой передачи поддерживается в качестве ступени, аналогичной режиму фиксированной ступени (например, в качестве первой ступени переднего хода). В отличие от этого, если скорость V транспортного средства равна или выше заданной скорости V1 таким образом, что ответ этапа S6 представляет собой "Да", процедура переходит к этапу S8, чтобы разрешать выполнение операции переключения передач, и после этого возвращается. В этом случае, ступень зубчатой передачи трансмиссии 4 выбирается с обращением к карте переключения передач для нормального режима переключения передач. В этом случае, в частности, ступень зубчатой передачи выбирается, например, только из восьмой ступени переднего хода, девятой ступени переднего хода и десятой ступени переднего хода, доступных в диапазоне скоростей выше заданной скорости V1. Таким образом, во втором режиме пропуска, ступень зубчатой передачи поддерживается в качестве первой ступени переднего хода в случае, если скорость V транспортного средства ниже заданной скорости V1, и ступень зубчатой передачи выбирается из восьмой-десятой ступеней переднего хода в случае, если скорость V транспортного средства равна или выше заданной скорости V1.
Таким образом, во втором режиме пропуска, изменение поведения транспортного средства EV подавляется предпочтительно по сравнению с эффективностью использования энергии в диапазоне низких скоростей, в котором водитель легко ощущает изменение поведения транспортного средства EV. В отличие от этого, в диапазоне высоких скоростей, в котором для водителя затруднительно считывать изменение поведения транспортного средства EV, или поведение транспортного средства EV значительно не изменяется посредством операции переключения передач, уменьшение эффективности использования энергии предпочтительно предотвращается. Таким образом, согласно примерному варианту осуществления, операция переключения передач может выполняться при уменьшении изменения поведения транспортного средства EV, а также предотвращении уменьшения эффективности использования энергии.
Согласно примерному варианту осуществления, в случае если потери энергии увеличиваются в адаптивном режиме по сравнению с нормальным режимом переключения передач, операция переключения передач разрешается во время замедления транспортного средства EV при удовлетворении заданного условия. В частности, рабочая точка регулируется таким образом, чтобы оптимизировать эффективность использования энергии во время замедления транспортного средства EV при удовлетворении заданного условия.
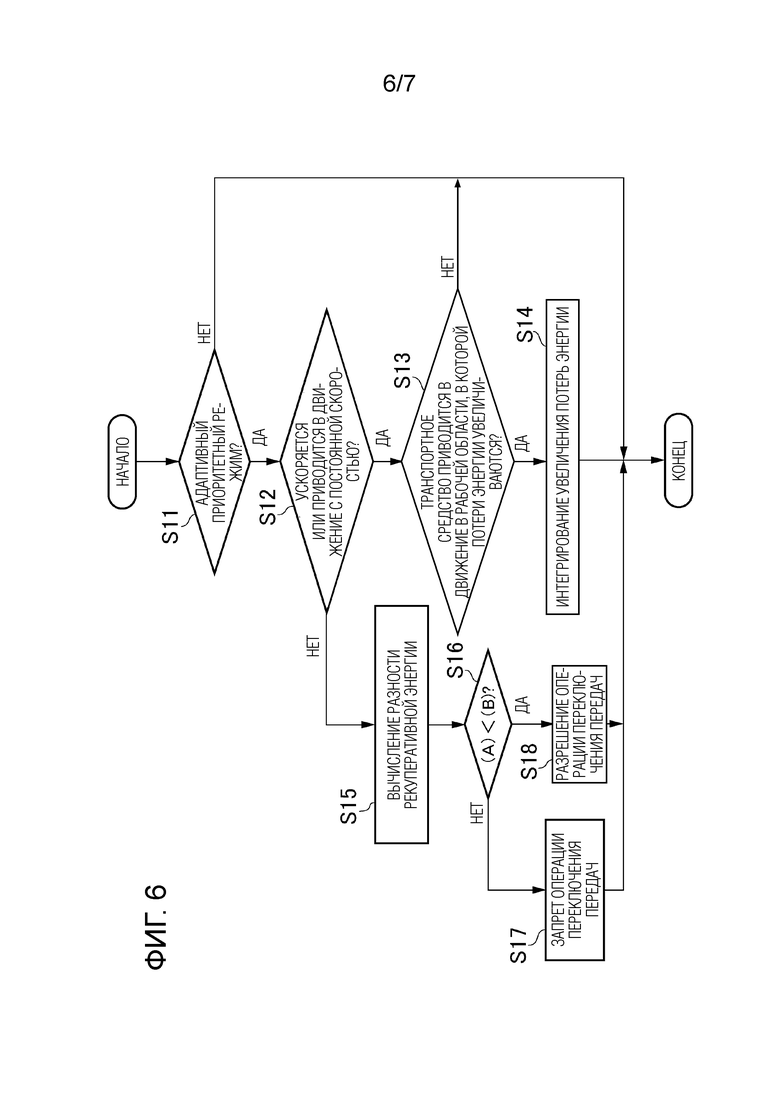
С этой целью, система управления переключением частоты вращения дополнительно выполнена с возможностью выполнять процедуру, показанную на фиг. 6. В процедуре, показанной на фиг. 6, на этапе S11, определяется то, выбирается или нет адаптивный приоритетный режим в данный момент. Такое определение на этапе S11 является аналогичным этапу S1 процедур, показанных на фиг. 3 и 5.
Если адаптивный режим не выбирается таким образом, что ответ этапа S11 представляет собой "Нет", процедура возвращается. В этом случае, выбирается нормальный режим переключения передач. В отличие от этого, если адаптивный режим выбирается в данный момент таким образом, что ответ этапа S11 представляет собой "Да", процедура переходит к этапу S12, чтобы определять то, ускоряется или приводится в движение либо нет транспортное средство EV с постоянной скоростью. Таким образом, на этапе S12, определяется то, запрашивается или нет движущая сила, чтобы приводить в движение транспортное средство EV. Следовательно, например, такое определение на этапе S12 может выполняться на основе того факта, что требуемая движущая сила больше нуля.
Если транспортное средство EV ускоряется или приводится в движение с постоянной скоростью таким образом, что ответ этапа S12 представляет собой "Да", процедура переходит к этапу S13, чтобы определять то, приводится или нет транспортное средство EV в движение в рабочей области, в которой потери энергии увеличиваются, как результат выбора режима фиксированной ступени, первого режима пропуска или второго режима пропуска. В частности, рабочая область транспортного средства EV регулируется посредством скорости транспортного средства и требуемой движущей силы. Например, такое определение на этапе S13 может выполняться на основе того, отличается или нет ступень зубчатой передачи, выбранная в режиме фиксированной ступени, первом режиме пропуска или втором режиме пропуска, от ступени зубчатой передачи, которая должна выбираться в нормальном режиме переключения передач. Вместо этого, такое определение на этапе S13 может выполняться на основе того, отличается или нет вычисленная рабочая точка электромотора 1 в режиме фиксированной ступени, первом режиме пропуска или втором режиме пропуска от вычисленной рабочей точки электромотора 1 для случая, в котором выбирается нормальный режим переключения передач.
Если транспортное средство EV не приводится в движение в рабочей области, в которой потери энергии увеличиваются таким образом, что ответ этапа S13 представляет собой "Нет", процедура возвращается. В отличие от этого, если транспортное средство EV приводится в движение в рабочей области, в которой потери энергии увеличиваются таким образом, что ответ этапа S13 представляет собой "Да", процедура переходит к этапу S14, чтобы вычислять величину увеличения потерь энергии, и после этого возвращается. В частности, эффективность использования энергии в режиме фиксированной ступени, первом режиме пропуска или втором режиме пропуска вычитается из эффективности использования энергии для случая, в котором выбирается нормальный режим переключения передач. Затем величина (A) увеличения потерь энергии вычисляется посредством интегрирования во времени вычисленной разности эффективности использования энергии. Такая вычисленная величина (A) увеличения потерь энергии сохраняется в ECU 8.
В противном случае, если транспортное средство EV замедляется таким образом, что ответ этапа S12 представляет собой "Нет", процедура переходит к этапу S15, чтобы вычислять разность (B) рекуперативной энергии. На этапе S15, в частности, величина рекуперативной энергии для случая, в котором транспортное средство EV останавливается только посредством тормозного крутящего момента, сформированного посредством электромотора 1, при поддержании текущей ступени зубчатой передачи, вычисляется с учетом эффективности рекуперации электромотора 1. Аналогично, величина рекуперативной энергии для случая, в котором транспортное средство EV останавливается только посредством тормозного крутящего момента, сформированного посредством электромотора 1, при переключении ступени зубчатой передачи таким образом, чтобы оптимизировать эффективность использования энергии, вычисляется с учетом эффективности рекуперации электромотора 1. Затем разность (B) между этими величинами рекуперативных энергий вычисляется. Таким образом, на этапе S15, величина увеличения энергии, которая может рекуперироваться, вычисляется на основе разности между эффективностью рекуперации для случая, в котором операция переключения передач выполняется, и эффективностью рекуперации для случая, в котором операция переключения передач не выполняется. Тем не менее, если нормальный режим переключения передач выбирается до начала замедления транспортного средства EV, замедление транспортного средства EV может начинаться на ступени зубчатой передачи, которая не может выбираться в режиме фиксированной ступени, первом режиме пропуска или втором режиме пропуска. Следовательно, в этом случае, вышеуказанная текущая ступень зубчатой передачи не ограничена ступенями зубчатой передачи, выбираемыми в режиме фиксированной ступени, первом режиме пропуска или втором режиме пропуска.
Затем на этапе S16 определяется то, превышает или нет разность (B) рекуперативной энергии величину (A) увеличения потерь энергии, вычисленную на этапе S14. Если разность (B) рекуперативной энергии меньше величины (A) увеличения потерь энергии таким образом, что ответ этапа S16 представляет собой "Нет", процедура переходит к этапу S17, чтобы запрещать операцию переключения передач, и после этого возвращается. Например, если третья ступень переднего хода выбирается при начале замедления транспортного средства EV, транспортное средство EV замедляется при поддержании третьей ступени переднего хода.
В отличие от этого, если разность (B) рекуперативной энергии превышает величину (A) увеличения потерь энергии таким образом, что ответ этапа S16 представляет собой "Да", процедура переходит к этапу S18, чтобы разрешать выполнение операции переключения передач, и после этого возвращается. На этапе S18, в частности, величина рекуперативной энергии увеличивается посредством приведения в действие электромотора 1 в рабочей точке при высокой эффективности. С этой целью, операция переключения передач выполняется в соответствии со скоростью транспортного средства и т.д. между ступенями зубчатой передачи, включающими в себя ступени, не доступные в первом режиме пропуска, и т.д. Таким образом, если ответ этапа S16 представляет собой "Да", операция переключения передач выполняется аналогично нормальному режиму переключения передач.
Таким образом, согласно примерному варианту осуществления, доступность выполнения операции переключения передач во время замедления транспортного средства EV определяется на основе величины (A) увеличения потерь энергии, получающихся в результате выбора режима фиксированной ступени, первого режима пропуска или второго режима пропуска. В силу этого, согласно примерному варианту осуществления, электромотору 1 разрешается приводиться в действие в рабочей точке при высокой эффективности при соответствующем условии. По этой причине, ширина варьирования уровня SOC устройства 2 накопления электричества может уменьшаться, чтобы ограничивать повреждение устройства 2 накопления электричества. Помимо этого, операция переключения передач запрещается в случае, если разность (B) рекуперативной энергии меньше величины (A) увеличения потерь энергии. В этом случае, изменение поведения транспортного средства EV, получающееся в результате выполнения операции переключения передач, может подавляться. В силу этого, за счет такого выполнения процедуры, показанной на фиг. 6, транспортное средство EV может приводиться в движение адаптивно при уменьшении потребления электроэнергии.
Система управления переключением частоты вращения согласно примерному варианту осуществления также может применяться к последовательно-параллельному гибридному транспортному средству, показанному на фиг. 7. В транспортном средстве HV, показанном на фиг. 7, первичный движитель содержит двигатель 9, управляющий электромотор 10 и приводной электромотор 11. Вид электромотора, идентичный электромотору 1, может использоваться в качестве управляющего электромотора 10 и приводного электромотора 11, соответственно.
Механизм 13 деления мощности соединяется с выходным валом 12 двигателя 9 таким образом, что выходной крутящий момент двигателя 9 распределяется на управляющий электромотор 10 и ведущие колеса 7. В примере, показанном на фиг. 7, планетарный зубчатый механизм с сателлитами одного типа, адаптированный с возможностью выполнять дифференциальное действие, используется в качестве механизма 13 деления мощности. В частности, механизм 13 деления мощности содержит солнечную шестерню S, коронную шестерню R в качестве шестерни внутреннего зацепления, которая размещается концентрически с солнечной шестерней S, множество планетарных шестерен P, размещенных между солнечной шестерней S и коронной шестерней R, и водило C, поддерживающее планетарные шестерни P вращающимся способом. Вместо этого, планетарный зубчатый механизм с сателлитами двух типов и планетарный зубчатый механизм Равиньо также могут использоваться в качестве механизма 13 деления мощности. Помимо этого, сложный планетарный зубчатый механизм, который может изменять коэффициент деления крутящего момента на управляющий электромотор 10 и ведущие колеса 7 посредством избирательного соединения множества планетарных зубчатых механизмов через муфту и т.п., также может использоваться в качестве механизма 13 деления мощности.
Управляющий электромотор 10 соединяется с солнечной шестерней S, и двигатель 9 соединяется с водилом C. При передаче выходного крутящего момента двигателя 9 в коронную шестерню R управляющий электромотор 10 формирует реактивный крутящий момент. Таким образом, в механизме 13 деления мощности, водило C служит в качестве входного элемента, солнечная шестерня S служит в качестве реактивного элемента, и коронная шестерня R служит в качестве выходного элемента. Двигатель 9 может соединяться с водилом C не только непосредственно, но также и косвенно через зубчатый механизм или преобразователь крутящего момента для варьирования крутящего момента двигателя 9 или демпфирующий механизм для демпфирования пульсации крутящего момента двигателя 9.
Выходная шестерня 14 формируется на внешней периферийной поверхности коронной шестерни R. Ведомая шестерня 15 садится в один конец обратного вала 16, идущий параллельно выходному валу 12 двигателя 9, таким образом, что она вводится в зацепление с выходной шестерней 14, и ведущая шестерня 19 садится в другой конец обратного вала 16, таким образом, что она вводится в зацепление с коронной шестерней 18 блока 17 дифференциала. Ведущая шестерня 19 диаметрально меньше коронной шестерни 18 таким образом, что крутящий момент ведущей шестерни 19 доставляется в блок 17 дифференциала при умножении. Крутящий момент, доставляемый в блок 17 дифференциала, распределяется на пару ведущих колес 7 через каждый ведущий вал 20.
Приводной электромотор 11, соответствующий "электромотору" примерного варианта осуществления, соединяется с ведомой шестерней 15. В частности, приводной электромотор 11 размещается таким образом, что выходной вал 21 (или вал ротора) приводного электромотора 11 идет параллельно выходному валу 12 двигателя 9 и обратному валу 16, и выходная шестерня 22, которая диаметрально меньше ведомой шестерни 15, садится в концевой фрагмент выходного вала 21 таким образом, что она вводится в зацепление с ведомой шестерней 15. Таким образом, выходной крутящий момент приводного электромотора 11 передается в ведомую шестерню 15 при умножении.
Управляющий электромотор 10 и приводной электромотор 11 отдельно соединяются с устройством 2 накопления электричества, включающим в себя аккумулятор и конденсатор таким образом, что электричество, вырабатываемое посредством управляющего электромотора 10 или приводного электромотора 11, накапливается в устройстве 2 накопления электричества, и электричество подается в управляющий электромотор 10 и приводной электромотор 11, соответственно. Помимо этого, электричество, вырабатываемое посредством одного из управляющего электромотора 10 и приводного электромотора 11, может подаваться в другой из управляющего электромотора 10 и приводного электромотора 11.
Чтобы управлять двигателем 9, управляющим электромотором 10, приводным электромотором 11 и т.д., транспортное средство HV, показанное на фиг. 7 также содержит ECU 8. Как описано выше, ECU 8 сконфигурирован как имеющий микрокомпьютер в качестве своей основной составляющей, и сигналы определения из различных датчиков отправляются в ECU 8. ECU 8 определяет целевые частоты вращения и целевые крутящие моменты двигателя 9, управляющего электромотора 10 и приводного электромотора 11 на основе входных сигналов и формул, а также карт, установленных в ECU 8, и передает сигналы команд управления в двигатель 9, управляющий электромотор 10 и приводной электромотор 11, чтобы достигать целевых частот вращения и целевых крутящих моментов. Например, ECU 8 принимает сигналы определения скорости транспортного средства, частоты вращения выходного вала 12 двигателя 9 (или водила C), частоты вращения управляющего электромотора 10 и приводного электромотора 11, нажатия педали акселератора (не показана), нажатия педали тормоза (не показана), уровня SOC устройства 2 накопления электричества, температуры устройства 2 накопления электричества, температур управляющего электромотора 10 и приводного электромотора 11 и т.д.
Рабочий режим транспортного средства HV может выбираться из гибридного режима (в дальнейшем сокращенно "HV-режим") и режим электротранспортного средства (в дальнейшем сокращенно "EV-режим"). В HV-режиме, транспортное средство HV приводится в движение посредством формирования движущего крутящего момента посредством двигателя 9 при формировании движущего крутящего момента посредством приводного электромотора 11 (или управляющего электромотора 10) согласно потребности. Во время приведения в движение в HV-режиме, требуемая мощность приведения в движение вычисляется, например, на основе нажатия педали акселератора, и после этого целевая частота вращения двигателя вычисляется в соответствии с требуемой мощностью приведения в движение. Как описано выше, механизм 13 деления мощности выполнен с возможностью передавать крутящий момент двигателя 9 в коронную шестерню R посредством установления реактивного крутящего момента посредством управляющего электромотора 10. Таким образом, частота вращения двигателя 9 может управляться произвольно посредством управления частотой вращения управляющего электромотора 10. С этой целью, целевая частота вращения управляющего электромотора 10 определяется в соответствии с такой вычисленной целевой частотой вращения двигателя. Поскольку частота вращения управляющего электромотора 10 может управляться непрерывно, частота вращения двигателя 9 также может управляться непрерывно. Таким образом, механизм 13 деления мощности может служить в качестве бесступенчатой трансмиссии, и, соответственно, механизм 13 деления мощности соответствует "трансмиссии" примерного варианта осуществления.
При управлении частотой вращения управляющего электромотора 10 таким образом, чтобы регулировать частоту вращения двигателя 9 до целевой частоты вращения при установлении реактивного крутящего момента посредством управляющего электромотора 10, чтобы передавать крутящий момент двигателя 9 в коронную шестерню R, управляющий электромотор 10 служит в качестве электромотора или генератора в соответствии со скоростью транспортного средства и целевой частотой вращения двигателя. В частности, в случае если управляющий электромотор 10 устанавливает реактивный крутящий момент в таком направлении, чтобы увеличивать частоту вращения управляющего электромотора 10, управляющий электромотор 10 служит в качестве электромотора. В отличие от этого, в случае если управляющий электромотор 10 устанавливает реактивный крутящий момент в таком направлении, чтобы уменьшать частоту вращения управляющего электромотора 10, управляющий электромотор 10 служит в качестве генератора.
В случае если управляющий электромотор 10 служит в качестве электромотора, выходная мощность управляющего электромотора 10 суммируется с выходной мощностью двигателя 9 и доставляется в коронную шестерню R. В отличие от этого, в случае если управляющий электромотор 10 служит в качестве генератора, выходная мощность двигателя 9 частично транслируется в электрическую мощность посредством управляющего электромотора 10. Таким образом, выходная мощность двигателя 9 уменьшается с возможностью доставляться в коронную шестерню R.
Крутящий момент приводного электромотора 11 управляется в соответствии с разностью между требуемой движущей силой (или движущим крутящим моментом), чтобы приводить в движение транспортное средство HV, вычисленной, например, на основе нажатия педали акселератора, и крутящим моментом, доставляемым в коронную шестерню R. Например, в случае если требуемый движущий крутящий момент для того, чтобы приводить в движение транспортное средство HV, не может достигаться посредством крутящего момента, доставляемого в коронную шестерню R, приводной электромотор 11 работает в качестве электромотора, чтобы прикладывать крутящий момент к ведомой шестерне 15. В отличие от этого, в случае если крутящий момент, доставляемый в коронную шестерню R, превышает требуемый движущий крутящий момент для того, чтобы приводить в движение транспортное средство HV, приводной электромотор 11 работает в качестве генератора для того, чтобы уменьшать крутящий момент в ведомой шестерне 15. Таким образом, приводной электромотор 11 служит в качестве вспомогательного электромотора.
В случае изменения передаточного отношения механизма 13 деления мощности при поддержании выходной мощности двигателя 9 равной постоянной мощности, частота вращения двигателя 9 изменяется, за счет этого изменяя выходной крутящий момент двигателя 9. Как результат, выходной крутящий момент механизма 13 деления мощности изменяется. Следовательно, в этом случае, выходной крутящий момент приводного электромотора 11 изменяется в соответствии с выходным крутящим моментом механизма 13 деления мощности. В частности, крутящий момент приводного электромотора 11 изменяется посредством изменения передаточного отношения механизма 13 деления мощности.
В EV-режиме, транспортное средство HV приводится в движение посредством формирования движущего крутящего момента только посредством приводного электромотора 11, и необязательно формировать движущий крутящий момент посредством двигателя 9 и управляющего электромотора 10. В этой ситуации, крутящий момент трения двигателя 9 увеличивается больше инерционного крутящего момента и крутящего момента от зубцовых гармонических помех поля управляющего электромотора 10; в силу чего двигатель 9 останавливается, и управляющий электромотор 10 работает на холостом ходу. В EV-режиме, если необходимо приводить в действие двигатель 9, чтобы, например, прогревать двигатель 9, управляющий электромотор 10 может работать на холостом ходу без подачи электричества в управляющий электромотор 10 при приведении в действие двигателя 9.
В HV-режиме, полная эффективность использования энергии транспортного средства HV изменяется в зависимости от эффективности использования энергии в соответствии с рабочей точкой двигателя 9, эффективности использования энергии управляющего электромотора 10, эффективности использования энергии приводного электромотора 11 и эффективности передачи мощности в соответствии с частотами вращения и крутящими моментами шестерней. Следовательно, в принципе, крутящие моменты и частоты вращения двигателя 9, управляющего электромотора 10 и приводного электромотора 11 управляются таким образом, чтобы оптимизировать полную эффективность использования энергии транспортного средства HV.
Тем не менее, хотя механизм 13 деления мощности служит в качестве бесступенчатой трансмиссии, если требуемая движущая сила значительно изменяется, и в силу этого передаточное отношение механизма 13 деления мощности резко изменяется, поведение транспортного средства HV должно изменяться посредством резкого изменения частоты вращения двигателя 9. Такое изменение поведения транспортного средства HV может быть нежелательным для водителя, и водитель может испытывать некомфортное ощущение. В этой ситуации, если передаточное отношение механизма 13 деления мощности не изменяется, изменение поведения транспортного средства HV может подавляться, но полная эффективность использования энергии транспортного средства HV уменьшается. Следовательно, расход топлива и потребление электроэнергии должны увеличиваться.
Чтобы не допускать таких недостатков, в транспортном средстве HV, также предпочтительно определять то, следует или нет выполнять операцию переключения частоты вращения механизма 13 деления мощности в соответствии с уровнем SOC устройства 2 накопления электричества. С этой целью, режим фиксированной ступени, первый режим пропуска и второй режим пропуска процедур, показанных на фиг. 3 и 5, могут модифицироваться, как пояснено ниже.
В частности, режим фиксированной ступени может модифицироваться на режим фиксированного отношения, в котором передаточное отношение механизма 13 деления мощности поддерживается равным заданному отношению. В этом случае, чтобы предотвращать уменьшение частоты вращения двигателя 9 до частоты вращения останова в диапазоне низких скоростей, предпочтительно задавать передаточное отношение механизма 13 деления мощности фиксировано равным отношению, сравнимому с передаточным отношением на первой ступени переднего хода шестеренчатой трансмиссии 4, показанной на фиг. 1.
В транспортном средстве HV, показанном на фиг. 7, требуемая движущая сила достигается посредством уменьшения крутящего момента двигателя 9 при увеличении крутящего момента приводного электромотора 11 либо посредством увеличения крутящего момента двигателя 9 при уменьшении крутящего момента приводного электромотора 11. В силу этого, в режиме фиксированного отношения, уменьшение полной эффективности использования энергии транспортного средства HV может не допускаться посредством управления крутящими моментами двигателя 9 и приводного электромотора 11.
Изменение поведения транспортного средства HV, получающееся в результате выполнения операции переключения частоты вращения механизма 13 деления мощности в качестве бесступенчатой трансмиссии, меньше изменения транспортного средства, имеющего шестеренчатую трансмиссию, и частота такого изменения поведения транспортного средства HV ниже частоты в транспортном средстве, имеющем шестеренчатую трансмиссию. Следовательно, первый режим пропуска может заменяться посредством нормального режима переключения передач, в котором операция переключения частоты вращения выполняется таким образом, чтобы оптимизировать эффективность использования системы. В частности, в случае применения системы управления переключением частоты вращения согласно примерному варианту осуществления к транспортному средству HV, показанному на фиг. 7, система управления переключением частоты вращения выбирает режим фиксированного отношения, если уровень SOC устройства 2 накопления электричества равен или выше порогового уровня Th1. Следовательно, уменьшение эффективности использования энергии в транспортном средстве HV может не допускаться, и изменение поведения транспортного средства HV может уменьшаться.
Второй режим пропуска может заменяться посредством режима, в котором передаточное отношение задается фиксировано равным передаточному отношению в режиме фиксированного отношения, если уровень SOC устройства 2 накопления электричества ниже порогового уровня Th1, и передаточное отношение управляется таким образом, чтобы оптимизировать эффективность использования системы в соответствии с требуемой движущей силой и скоростью транспортного средства, если уровень SOC устройства 2 накопления электричества равен или выше порогового уровня Th1. В случае если уровень SOC устройства 2 накопления электричества равен или выше порогового уровня Th1, передаточное отношение может изменяться не только ступенчато, но также и непрерывно.
Во время замедления транспортного средства HV, тормозной крутящий момент двигателя устанавливается в соответствии с насосными потерями и крутящим моментом трения двигателя 9 посредством прекращения подачи топлива в двигатель 9, и управляющий электромотор 10 устанавливает реактивный крутящий момент для того, чтобы доставлять тормозной крутящий момент двигателя в ведущие колеса 7. Помимо этого, приводной электромотор 11 работает в качестве генератора для того, чтобы прикладывать тормозной крутящий момент к ведущим колесам 7 в зависимости от частоты вращения двигателя 9. Поскольку частота вращения приводного электромотора 11 во время замедления изменяется в зависимости от скорости транспортного средства, эффективность выработки (т.е. эффективность использования энергии) регулируется посредством рекуперативного крутящего момента приводного электромотора 11. Во время замедления транспортного средства HV, отношение между тормозным крутящим моментом двигателя и тормозным крутящим моментом приводного электромотора 11 может изменяться посредством управления передаточным отношением механизма 13 деления мощности.
Соответственно, в случае если ответ этапа S16 представляет собой "Да" во время замедления транспортного средства HV таким образом, что выполнение операции переключения частоты вращения разрешается, передаточное отношение механизма 13 деления мощности управляется таким образом, что приводной электромотор 11 формирует тормозной крутящий момент, который может оптимизировать эффективность выработки приводного электромотора 11. В частности, рабочая точка приводного электромотора 11 сдвигается посредством управления передаточным отношением механизма 13 деления мощности, чтобы изменять требуемый крутящий момент приводного электромотора 11. В этой ситуации, текущее передаточное отношение не может превышать отношение, которое может оптимизировать эффективность выработки приводного электромотора 11. Таким образом, в случае если операция переключения частоты вращения разрешается на этапе S18, операция переключения частоты вращения не ограничена переключением "вверх" для уменьшения передаточного отношения.
Как описано выше, система управления переключением частоты вращения согласно примерному варианту осуществления может применяться не только к транспортному средству, в котором трансмиссия размещается между электромотором и ведущими колесами, но также и к транспортному средству, в котором трансмиссия размещается между двигателем и ведущим колесом, и электромотор соединяется с выходным валом трансмиссии. Трансмиссия может представлять собой не только шестеренчатую трансмиссию, которая изменяет передаточное отношение ступенчато, но также и бесступенчатую трансмиссию, которая изменяет передаточное отношение непрерывно. Следовательно, система управления переключением частоты вращения согласно примерному варианту осуществления может применяться к транспортному средству, в котором как двигатель, так и электромотор размещаются на входной стороне трансмиссии и к последовательному гибридному транспортному средству, в котором двигатель соединяется с генератором, и электромотор, приводимый в действие посредством электричества, подаваемого из генератора, соединяется с трансмиссией. Дополнительно, система управления переключением частоты вращения согласно примерному варианту осуществления также может применяться к транспортному средству, в котором другое электромотор, служащий в качестве первичного движителя, соединяется с выходным валом трансмиссии, размещаемой между электромотором и ведущими колесами, и к транспортному средству со встроенным в колесо электромотором, в котором электромотор в качестве первичного движителя и трансмиссии размещается, соответственно, в каждом колесе.
Кроме того, система управления переключением частоты вращения согласно примерному варианту осуществления также может применяться к транспортному средству, в котором адаптивный приоритетный режим не доступен. В этом случае, режим фиксированной ступени (или режим фиксированного отношения) и второй режим пропуска должны выбираться в случае, если уровень SOC устройства 2 накопления электричества равен или выше порогового уровня Th1, и нормальный режим переключения передач должен выбираться в случае, если уровень SOC устройства 2 накопления электричества ниже порогового уровня Th1.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПРИВЕДЕНИЯ В ДВИЖЕНИЕ ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2585501C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ УСТРОЙСТВА ПЕРЕДАЧИ ДИНАМИЧЕСКОЙ МОЩНОСТИ | 2016 |
|
RU2625813C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖУЩЕЙ СИЛОЙ ТРАНСПОРТНОГО СРЕДСТВА | 2018 |
|
RU2694387C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2668448C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСМИССИЕЙ ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2664117C1 |
| Модуль привода для гибридного транспортного средства | 2018 |
|
RU2683136C1 |
| УСТРОЙСТВО ПЕРЕДАЧИ МОЩНОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2540197C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА С ЭЛЕКТРОПРИВОДОМ | 2014 |
|
RU2659151C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2670503C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСМИССИЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2699521C2 |

Система управления переключением частоты вращения, которая подавляет изменение поведения транспортного средства и предотвращает уменьшение эффективности использования энергии. Система управления переключением частоты вращения применяется к транспортному средству, содержащему: трансмиссию; колесо, соединенное с трансмиссией; электромотор, в котором крутящий момент или частота вращения изменяется посредством изменения передаточного отношения трансмиссии; и устройство накопления электричества, соединенное с электромотором. Контроллер выполнен с возможностью выбирать первый режим, если уровень SOC устройства накопления электричества ниже заданного уровня, и выбирать второй режим, если уровень SOC устройства накопления электричества равен или выше заданного уровня. 5 з.п. ф-лы, 7 ил.
1. Система управления переключением частоты вращения для транспортного средства, содержащая:
трансмиссию;
ведущее колесо, которое соединено с трансмиссией;
электромотор, в котором, по меньшей мере, любое одно из крутящего момента и частоты вращения изменяется посредством изменения передаточного отношения трансмиссии;
устройство накопления электричества, которое соединено с электромотором; и
контроллер, который управляет трансмиссией, при этом контроллер выполнен с возможностью:
выбора режима переключения передач трансмиссии из первого режима, в котором передаточное отношение трансмиссии изменяется в соответствии с рабочим состоянием транспортного средства, и второго режима, в котором передаточное отношение трансмиссии задается фиксированно равным заданному отношению, и
выбора первого режима в случае, если уровень заряда устройства накопления электричества ниже заданного уровня, и выбора второго режима в случае, если уровень заряда устройства накопления электричества равен или выше заданного уровня, отличающаяся тем, что
контроллер дополнительно выполнен с возможностью выбора режима переключения передач трансмиссии из нормального режима переключения передач, в котором передаточное отношение трансмиссии управляется в соответствии со скоростью транспортного средства и требуемой движущей силой таким образом, что оптимизируется эффективность использования системы, и адаптивного режима, в котором передаточное отношение трансмиссии управляется таким образом, что уменьшается изменение поведения транспортного средства,
при этом адаптивный режим включает в себя первый режим и второй режим, и
первый режим включает в себя режим, в котором запрещается, по меньшей мере, любое одно из передаточных отношений, доступных в нормальном режиме переключения передач;
причем контроллер дополнительно выполнен с возможностью:
вычисления величины увеличения потерь энергии, получающихся в результате приведения в движение транспортного средства в адаптивном режиме,
вычисления разности между величиной рекуперативной энергии от электромотора в случае поддержания текущего передаточного отношения во время замедления транспортного средства и величиной рекуперативной энергии от электромотора в случае изменения передаточного отношения трансмиссии, чтобы увеличивать рекуперативную энергию,
разрешения выполнения операции переключения частоты вращения трансмиссии во время замедления транспортного средства в случае, если разность между рекуперативными энергиями превышает величину увеличения потерь энергии, и
запрещения выполнения операции переключения частоты вращения трансмиссии во время замедления транспортного средства в случае, если разность между рекуперативными энергиями меньше величины увеличения потерь энергии.
2. Система управления переключением частоты вращения для транспортного средства по п. 1, отличающаяся тем, что второй режим включает в себя режим, в котором передаточное отношение трансмиссии задается фиксированно равным заданному отношению в случае, если скорость транспортного средства ниже заданного уровня, и передаточное отношение трансмиссии изменяется в случае, если скорость транспортного средства равна или выше заданного уровня.
3. Система управления переключением частоты вращения для транспортного средства по п. 2, отличающаяся тем, что контроллер дополнительно выполнен с возможностью задания передаточного отношения трансмиссии равным отношению, идентичному отношению в нормальном режиме переключения передач во время замедления транспортного средства, в случае если выполнение операции переключения частоты вращения трансмиссии разрешается во время замедления транспортного средства.
4. Система управления переключением частоты вращения для транспортного средства по п. 1, отличающаяся тем, что контроллер дополнительно выполнен с возможностью задания передаточного отношения трансмиссии равным отношению, идентичному отношению в нормальном режиме переключения передач во время замедления транспортного средства, в случае если выполнение операции переключения частоты вращения трансмиссии разрешается во время замедления транспортного средства.
5. Система управления переключением частоты вращения для транспортного средства по любому из пп. 1-4, отличающаяся тем, что электромотор соединен с входной стороной трансмиссии.
6. Система управления переключением частоты вращения для транспортного средства по любому из пп. 1-4, отличающаяся тем, что она дополнительно содержит:
другой первичный движитель, который соединен с входной стороной трансмиссии,
при этом электромотор соединен с трактом передачи крутящего момента между трансмиссией и ведущим колесом.
| US 2016107637 A1, 21.04.2016 | |||
| Блок-контейнер | 1989 |
|
SU1738948A1 |
| JP 2009113670 A, 28.05.2009 | |||
| JP 2010111191 A, 20.05.2010 | |||
| US 5873426 A, 23.02.1999. | |||

