ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к основанным на модели средствам управления печью и к способам управления печью. В частности, настоящее изобретение относится к использованию основанного на модели контроллера, управляющего печью на пылевидном угле (PC, Pulverized Coal), в которой используется избирательное некаталитическое восстановление (SNCR, Selective Non-Catalytic Reduction) газов, содержащих оксиды азота (NOx, Nitrogen Oxide). Печь может входить в состав котла.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Процессы избирательного некаталитического восстановления (SNCR) представляют собой один из способов уменьшения содержимого NOx в дымовых газах печей, образующихся в процессе сгорания, с использованием подходящего восстановителя в некаталитической среде. Поскольку для процесса SNCR не требуется катализатор в отличие от процесса избирательного каталитического восстановления (SCR, Selective Catalytic Reduction), температуры реакции для процесса SNCR должны поддерживаться в требуемых пределах. Процесс SNCR включает впрыскивание либо аммиака, либо мочевины в топку котла в местоположении, в котором температура дымового газа находится в пределах от 1400 до 2000°F (от 760 до 1090°C), для проведения реакции с оксидами азота, сформированными в ходе сгорания.
При температурах ниже 760°C NOx и аммиак не вступают в реакцию. Аммиак, который не вступает в реакцию, называется проскоком аммиака, и его наличие нежелательно, поскольку аммиак может реагировать с другими компонентами сгорания, такими как триоксид серы (SO3), в результате чего формируется аммониевая соль. Непрореагировавший аммиак может отводиться в дымовую трубу, и это нежелательно. При высоких температурах (>1090°C) аммиак начинает разлагаться на NOx и H2O. В этом случае вместо упрощения процедуры вывода из потока дымового газа имеющихся оксидов NOx создаются дополнительные оксиды NOx из аммиака. Кроме того, дополнительные сложности создает смешивание. В целом, больший объем NOx формируется в центре, а не рядом со стенами, поскольку пространство у стен холоднее, чем в центре. Вследствие этого больший объем аммиака должен находиться в центре, а меньший - рядом со стенами, в противном случае NOx в центре смешивается с недостаточным для уменьшения количеством аммиака, и происходит проскок избытка аммиака рядом со стенами.
Процесс SNCR обычно выполняется в тракте горячих дымовых газов печи, по большей части, в области путей излучения котла. На эффективность SNCR влияет нагрузка печи, загрузка угля и функционирование воздушного короба, - факторы, которые могут изменить характеристики дымового газа, например, температуру, избыток кислорода, содержание NOx и т.п. Желательно не только управлять выбросом NOx для поддержания его ниже регулируемого значения, но и уменьшать проскок аммиака, поскольку проскок аммиака также регулируется вне SNCR и в трубе установки. Кроме того, проскок аммиака представляет собой продукт отхода восстановителя NOx (в данном случае - мочевины), который увеличивает эксплуатационные расходы. Очевидно, что возникает необходимость в решении по оптимизации управления по нескольким переменным для улучшения управления выводом дымовых газов котла, которые поступают для SNCR, и непосредственно процессом SNCR для поддержания выброса NOx и проскока аммиака ниже регулируемых или более жестких промышленных предельных уровней и, в то же время, для минимизации эксплуатационных расходов на общую систему котла/SNCR.
Хотя теоретически в процессе избирательного некаталитического восстановления можно достичь той же эффективности, порядка 90%, что и при избирательном некаталитическом восстановлении (SCR), указанные практические ограничения по температуре, времени и смешиванию часто приводят к ухудшению результатов на практике. Однако экономическое преимущество избирательного некаталитического восстановления состоит в том, что в отличие избирательного каталитического восстановления затраты на катализатор отсутствуют.
Для достижения максимальных преимуществ технологии SNCR и в то же время сведения к минимуму ее недостатков возникает необходимость в решении по оптимизации управления по нескольким переменным для улучшения управления выводом дымовых газов печи, которые поступают для SNCR, и непосредственно управления процессом SNCR для поддержания выброса NOx и проскока аммиака ниже регулируемых предельных значений и, в то же время, для минимизации эксплуатационных расходов на общую систему котла/SNCR.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В данной заявке раскрывается система управления для уменьшения NOx в энергоустановке, содержащая прогнозирующий по модели контроллер; пропорциональный интегрально-дифференциальный контроллер и/или адаптивный контроллер, подчиненные прогнозирующему по модели контроллеру и функционально связанные с ним, причем пропорциональный интегрально-дифференциальный контроллер и/или адаптивный контроллер содержат цепь обратной связи; систему для уменьшения NOx, содержащую расходный бак с восстановителем NOx и водяной расходный бак, и печь для сжигания топлива, расположенную ниже по потоку от системы для уменьшения NOx и оснащенную множеством сопел, гидравлически связанных с системой для уменьшения NOx; при этом система управления электрически связана с системой для уменьшения NOx.
В данной заявке также раскрывается система управления для уменьшения NOx в энергоустановке, содержащая пропорциональный интегрально-дифференциальный контроллер и/или адаптивный контроллер; при этом пропорциональный интегрально-дифференциальный контроллер и/или адаптивный контроллер содержат цепь обратной связи; систему для уменьшения NOx, содержащую расходный бак с восстановителем NOx и водяной расходный бак, и печь для сжигания топлива, расположенную ниже по потоку от системы для уменьшения NOx и оснащенную множеством сопел, гидравлически связанных с системой для уменьшения NOx; причем система управления электрически связана с системой для уменьшения NOx.
В данной заявке также раскрывается способ, включающий предоставление из печи в прогнозирующий по модели контроллер информации, включающей по меньшей мере одно из следующего: выпуск NOx, проскок аммиака, уровень (уровни) распределения температуры в зоне реакции, требования к нагрузке печи или их комбинацию; и предоставление из прогнозирующего по модели контроллера в пропорциональный интегрально-дифференциальный контроллер и/или адаптивный контроллер управляющей информации, включающей по меньшей мере одно из следующего: отклонение распределения потока мочевины, отклонение общего несущего водного потока, высоту (высоты) впрыскивания сопел, частоту/амплитуду пульсации воды, отклонение от установленного значения NOx, отклонение от установленного значения избыточного кислорода, отклонение от установленного значения стехиометрии зоны основной горелки, отклонение от установленного значения перепада давления в воздушном коробе/печи или их комбинацию; при этом управляющая информация используется для управления вводом в печь восстановителя NOx.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
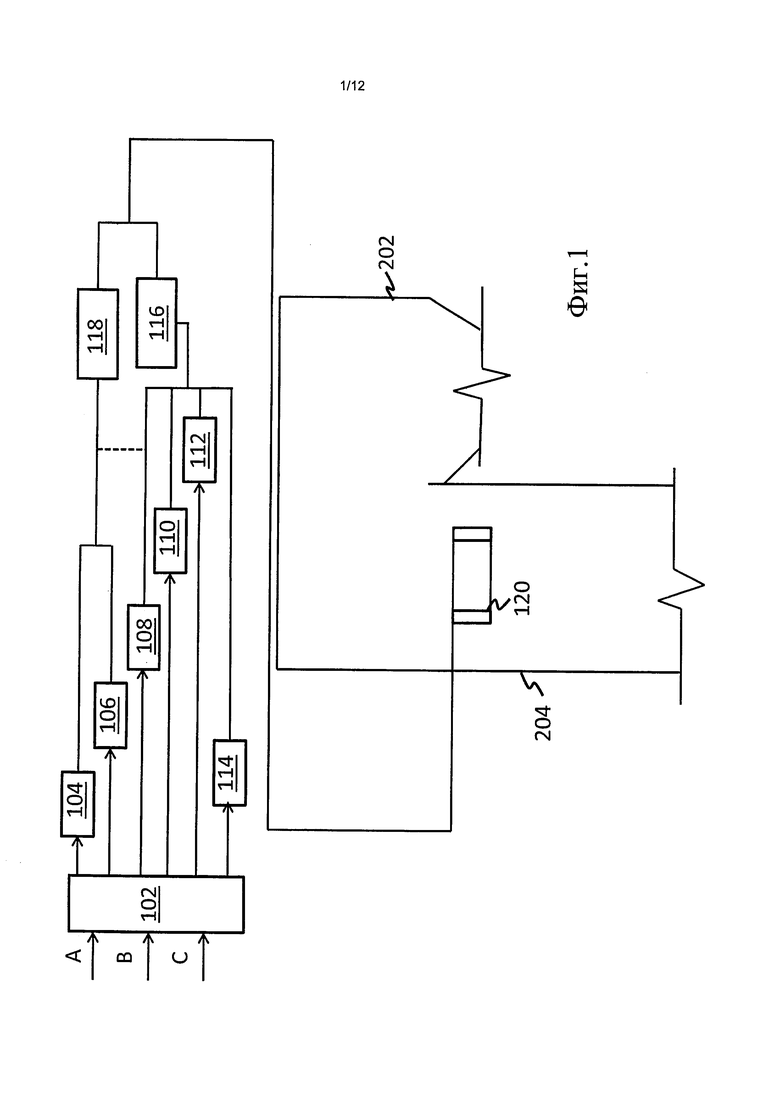
На фиг. 1 показано схематичное представление примера системы, в которой используются один или боле прогнозирующих по модели контроллеров (МРС, Model Predictive Controller) для управления множеством пропорциональных интегрально-дифференциальных контроллеров (PID, Proportional Integral Derivative Controller) для поддержки работоспособности процесса SNCR в печи, которая контактирует с системой обработки дымового газа.
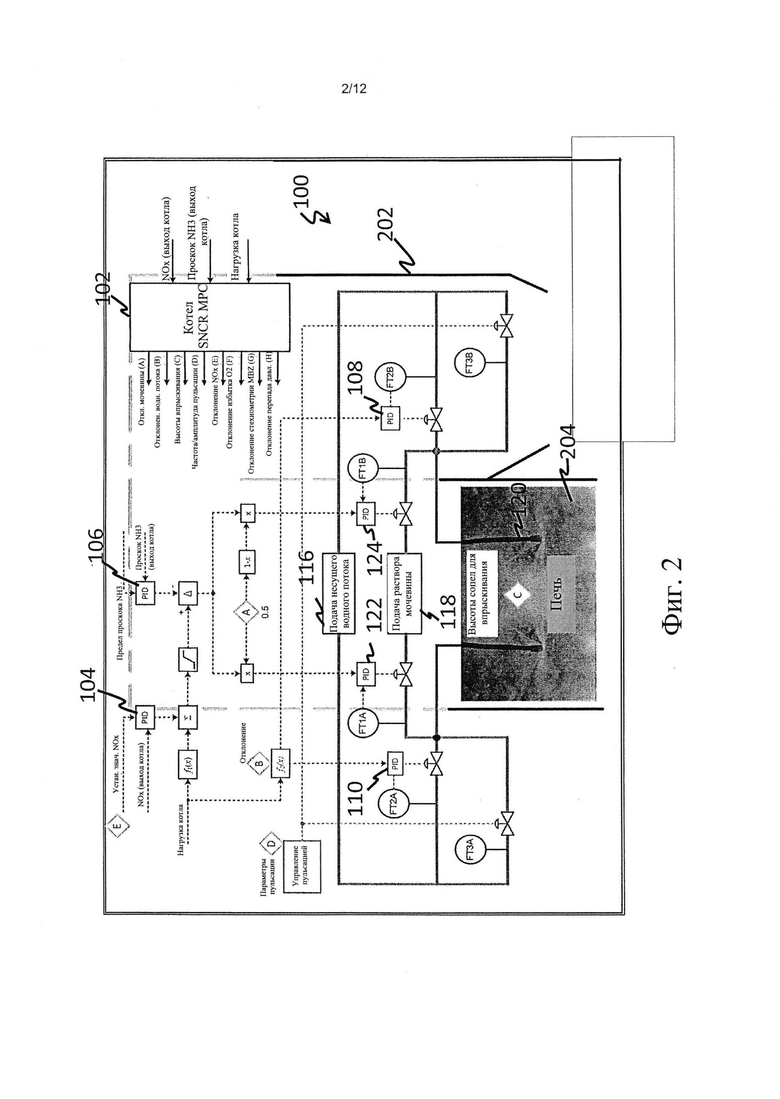
На фиг. 2 показана подробная схема примера системы, изображенной на фиг. 1.
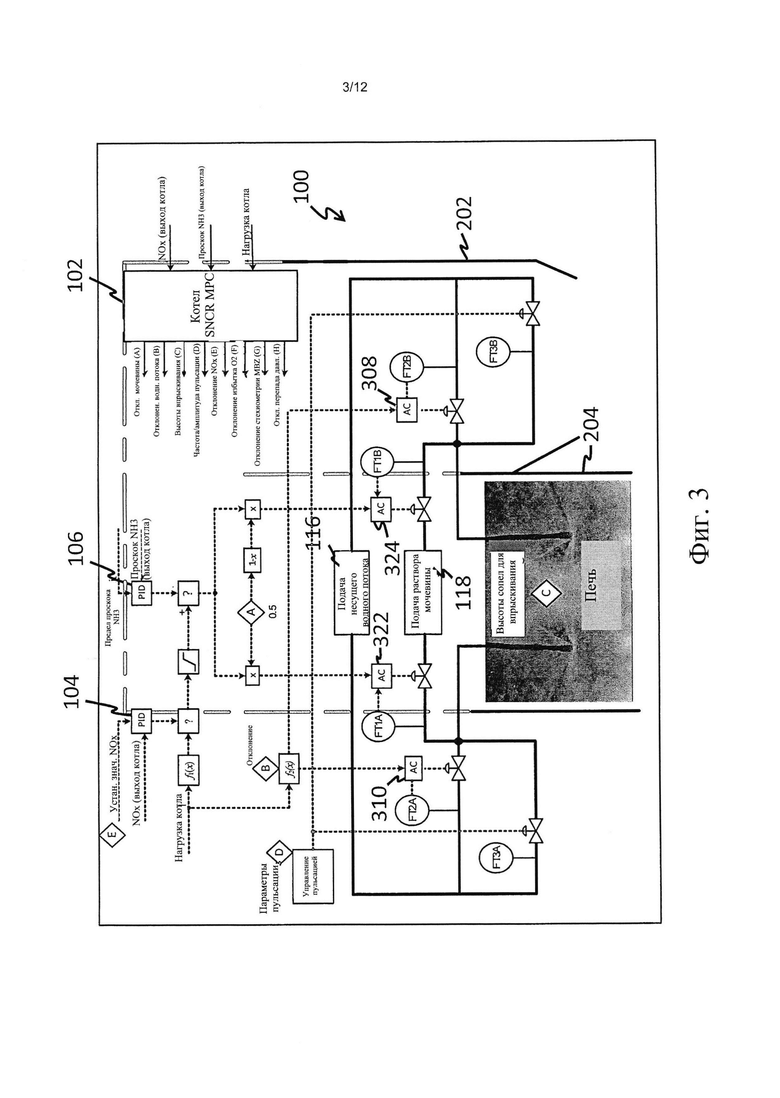
На фиг. 3 показана подробная схема примера системы, изображенной на фиг. 1, в которой контроллеры PID заменены адаптивными контроллерами.
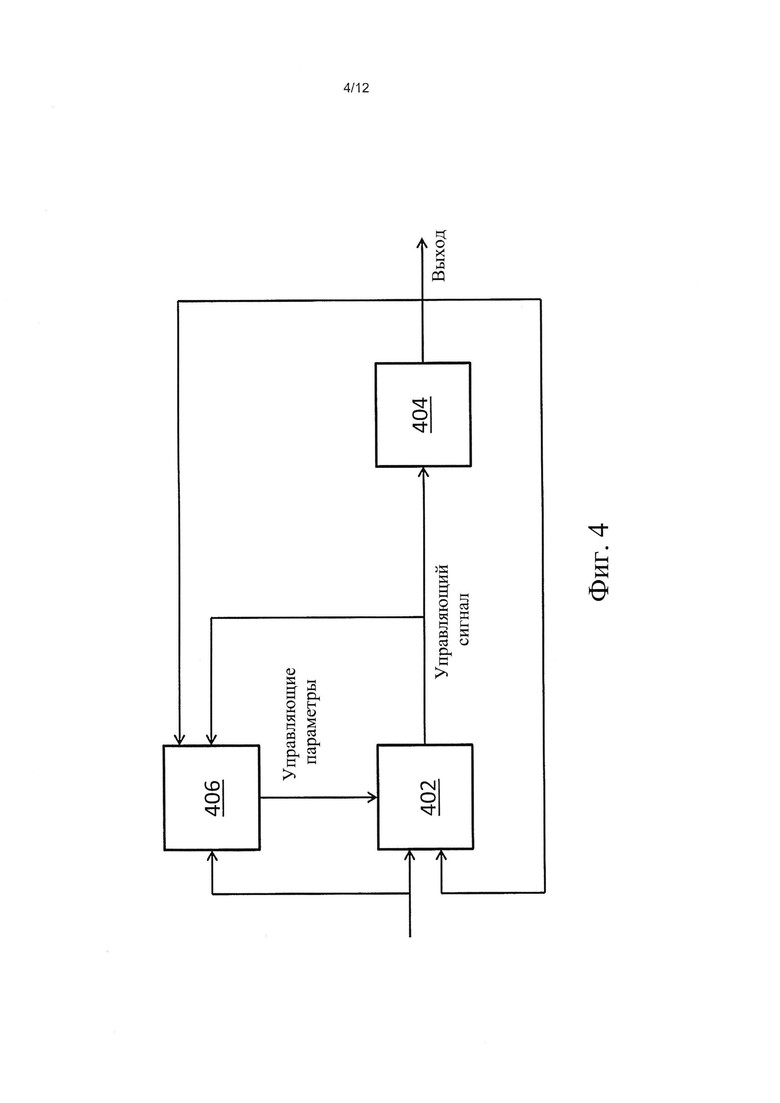
На фиг. 4 показан один из режимов работы адаптивного управления.
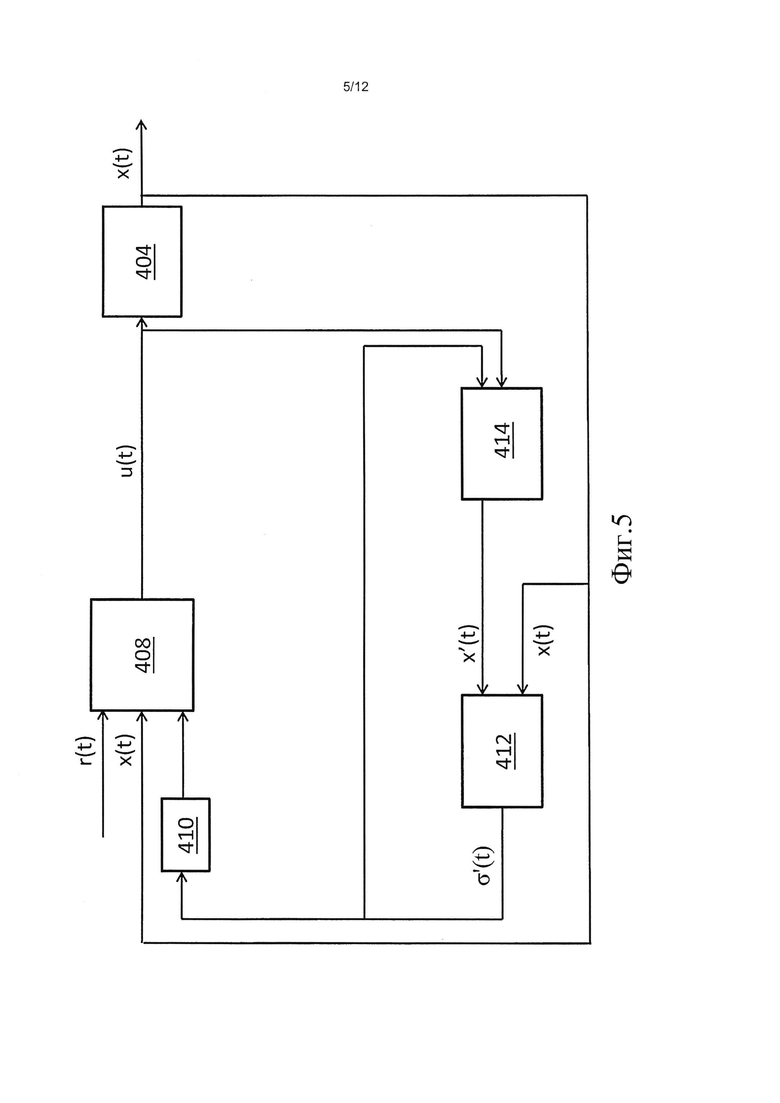
На фиг. 5 показан другой режим работы адаптивного управления.
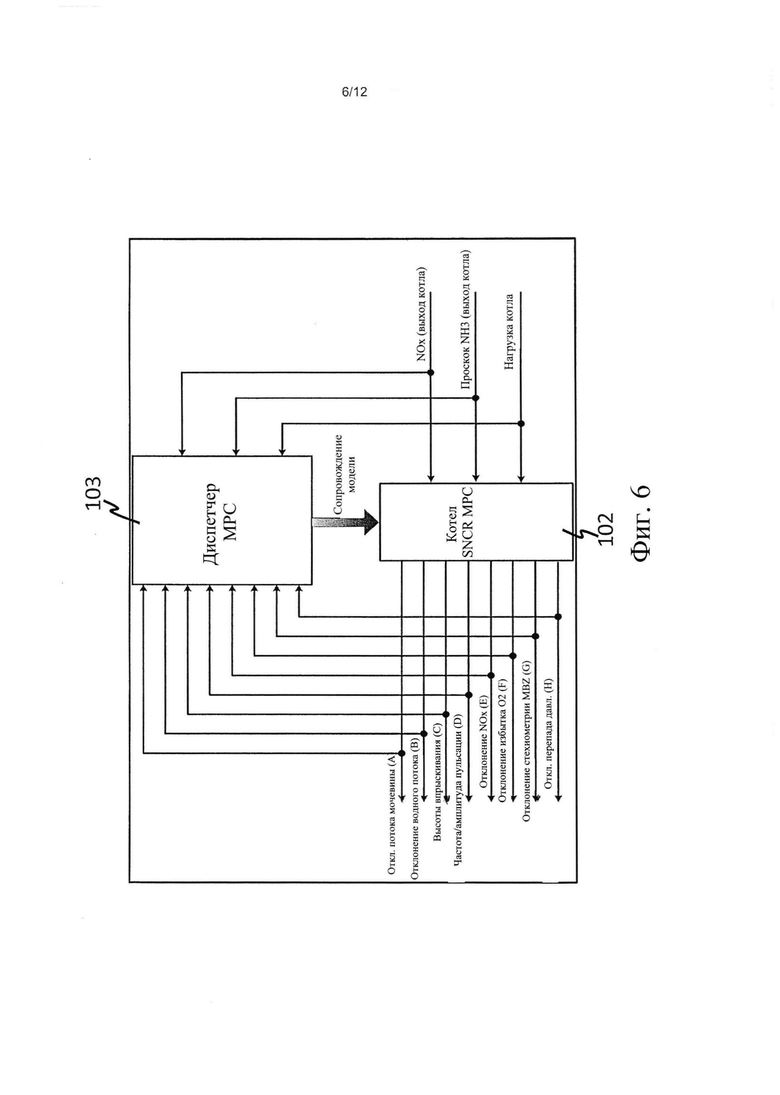
На фиг. 6 показана схема использования адаптивного механизма для выполнения оценки эффективности прогнозирующего по модели контроллера на основе мгновенных измерений.
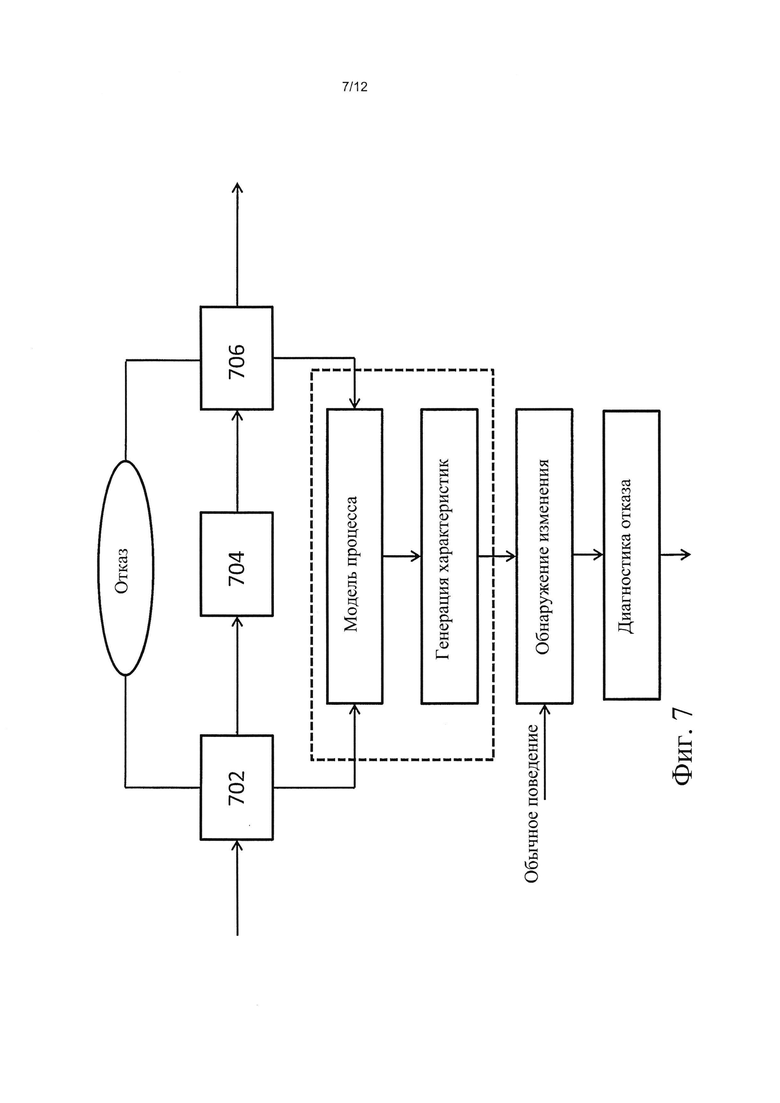
На фиг. 7 показана базовая структура обнаружения отказов на основе модели.
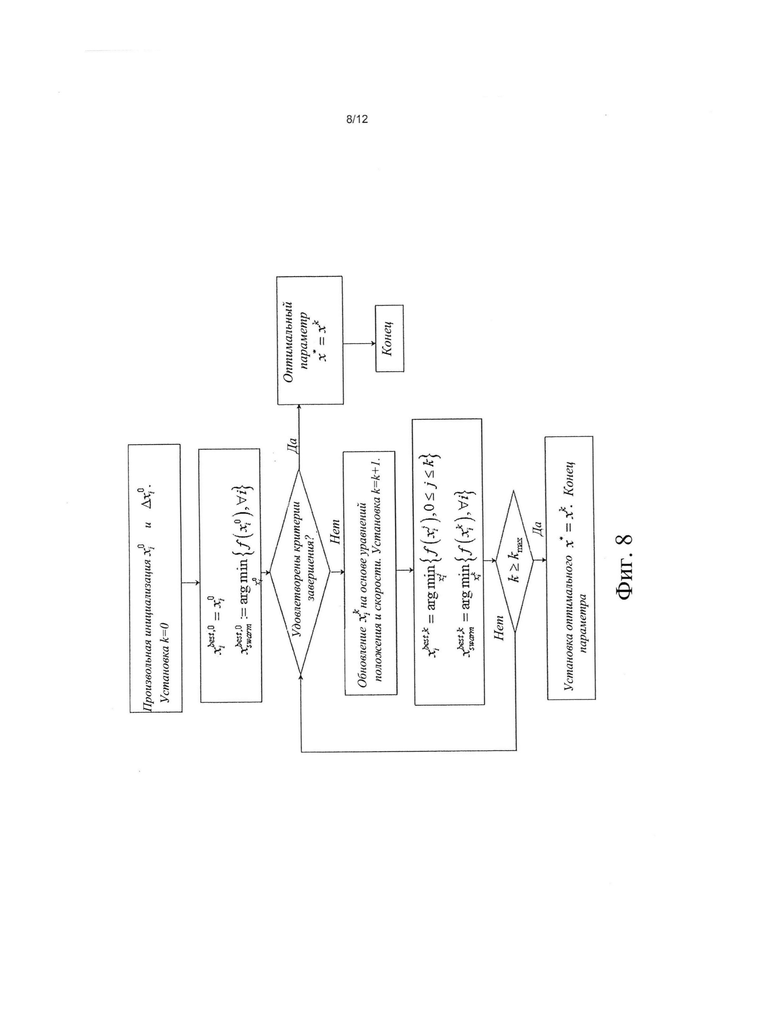
На фиг. 8 показана логическая схема оптимизации по сгустку частиц.
На фиг. 9 показан способ использования раскрываемой системы управления в печи для уменьшения NOx.
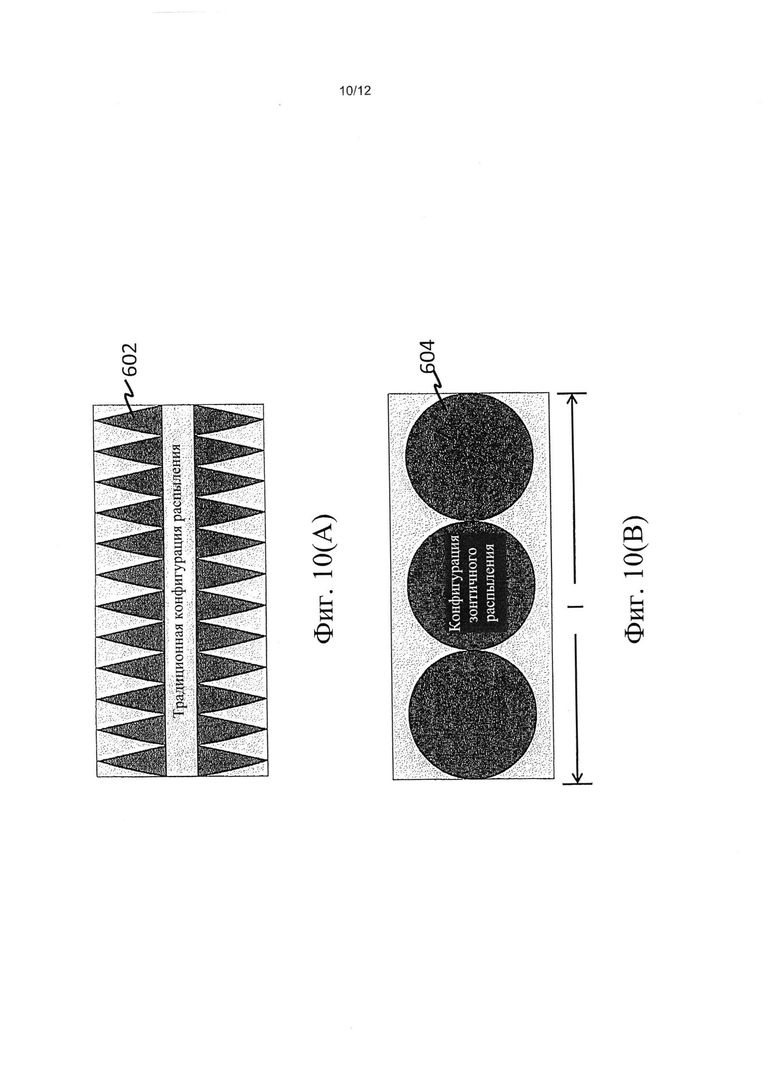
На фиг. 10(A) показаны традиционные профили распыления NOx для печей, оснащенных соплами в боковых стенах.
На фиг. 10(B) показаны профили распыления NOx для печей с соплами в своде печи или, в альтернативном варианте, с соплами вдоль оси по длине печи.
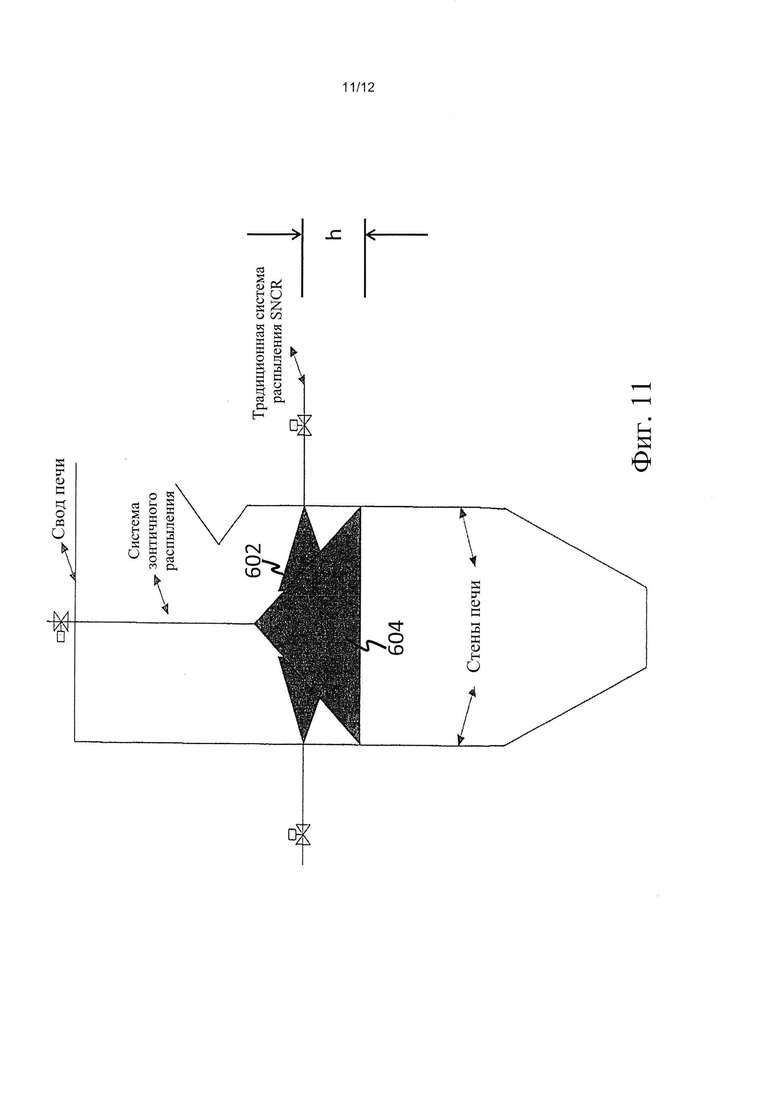
На фиг. 11 показана печь с соплами в боковой стене, а также вдоль оси по длине печи.
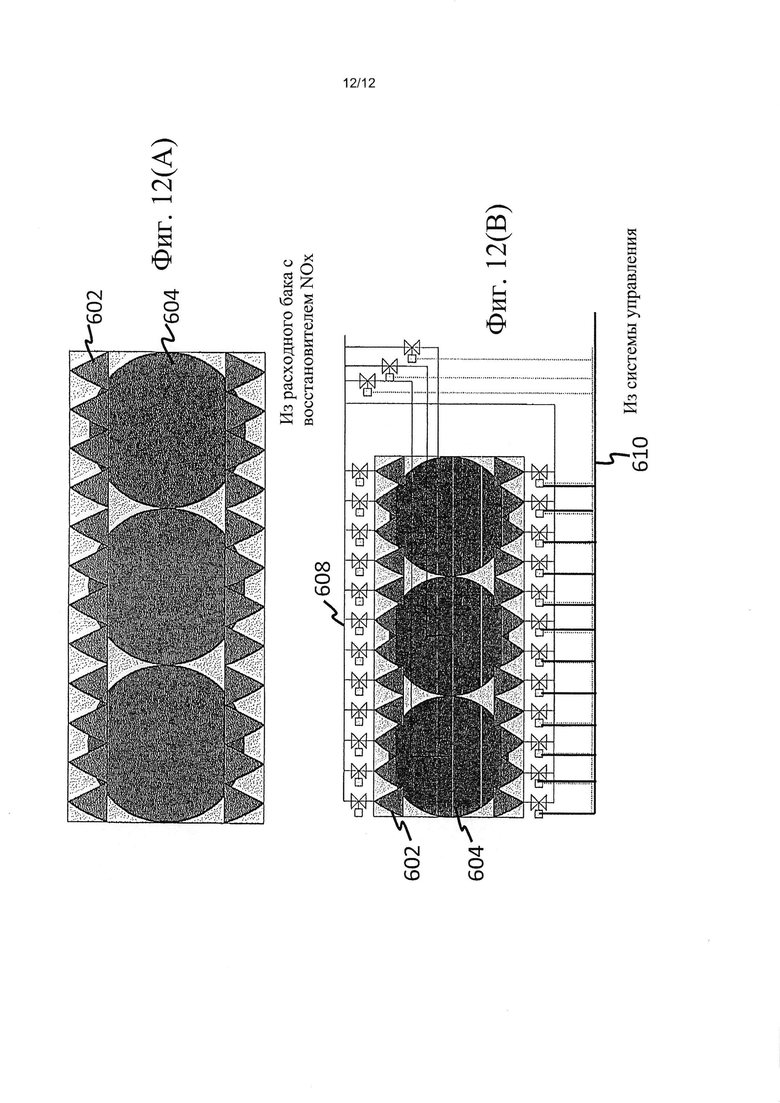
На фиг. 12(A) показана гибридная конфигурация распыления в печи со стороны свода печи.
На фиг. 12(B) показана система поставки восстановителя NOx и система управления, используемая для уменьшения выделения NOx в печи.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Далее настоящее изобретение описывается более подробно со ссылкой на прилагаемые чертежи, на которых показаны различные варианты его осуществления. Однако изобретение может быть реализовано с использованием множества других вариантов, и возможности его реализации не должны ограничиваться приведенными в этом описании вариантами. Точнее, эти варианты осуществления приведены, для того чтобы раскрытие изобретения было всесторонним и полным для специалистов в этой области техники. В этом описании одинаковые цифровые позиции соответствуют одинаковым элементам.
Следует принимать во внимание, что если в тексте есть указание на расположение одного элемента "на" другом элементе, то указанный элемент может находиться непосредственно на другом элементе, или между этими элементами могут присутствовать промежуточные элементы. В отличие от этого, если указано, что элемент "непосредственно находится на" другом элементе, то промежуточные элементы отсутствуют. В данном описании сочетание "и/или" используется для обозначения любой комбинации или всех комбинаций одного или более соответствующих перечисляемых элементов.
Следует принимать во внимание, что хотя термины «первый», «второй», «третий» и т.д. могут использоваться для описания различных элементов, компонентов, областей, уровней и/или секций, эти элементы, компоненты, области, уровни и/или секции не должны ограничиваться данными терминами. Указанные термины используются только для того, чтобы отличить один элемент, компонент, область, уровень или секцию от другого элемента, компонента, области, уровня или секции. Таким образом, первый элемент, компонент, область, уровень или секция, обсуждаемые ниже, могут называться вторым элементом, компонентом, уровнем, областью или секцией в пределах сущности настоящего изобретения.
Терминология, применяемая в этом описании, используется только с целью описания конкретных вариантов осуществления изобретения и не предназначена для его ограничения. В рамках этого описания единственное число также включает формы множественного числа, если явно не указано иное. Кроме того, следует понимать, что термины "содержит" и/или "содержащий", или "включает", и/или "включающий", используемые в этом описании, указывают на наличие изложенных признаков, диапазонов, целых чисел, шагов, операций, элементов и/или компонентов, но не исключают наличие или добавление одного или более других признаков, диапазонов, целых чисел, шагов, операций, элементов, компонентов и/или группы этих элементов.
Кроме того, относительные понятия, такие как "ниже" или "низ" и "выше" или "верх" могут использоваться для описания взаимосвязи одного элемента с другим в соответствии с изображениями, представленными на чертежах. Следует принимать во внимание, что относительные понятия охватывают различные ориентации устройства в дополнение к тем ориентациям, что показаны на чертежах. Например, если устройство на одном из чертежей перевернуто, элементы, описываемые как находящиеся "ниже" других элементов, должны теперь находиться "выше" других элементов. Пример понятия "ниже", таким образом, может охватывать ориентацию как в "нижнем", так и в "верхнем" положении в зависимости от конкретной ориентации на чертеже. Таким же образом, если устройство на одном из чертежей перевернуто, элементы, описываемые как находящиеся "ниже" других элементов или "под" ними, должны теперь находиться "над" другими элементами. Таким образом, термины "ниже" или "под" могут охватывать как нахождение выше, так и нахождение ниже другого элемента.
Если не указано иное, все термины, используемые в данном описании (включая технические и научные термины), имеют значение, обычно понимаемое специалистом в области техники, к которой относится настоящее изобретение. Следует также принимать во внимание, что значение терминов, определяемое в традиционно используемых словарях, не должно противоречить их значению в контексте соответствующей области техники и раскрытия настоящего изобретения и не должно интерпретироваться в идеализированном или полностью формальном смысле, если в этом описании явно не указано иное.
Примеры осуществления настоящего изобретения описываются со ссылкой на показанные на чертежах поперечные сечения, которые представляют собой схемы моделей вариантов осуществления настоящего изобретения. Таким образом, формы элементов, показанных на чертежах, могут изменяться в результате, например, применения производственных технологий и/или допусков. Соответственно, описанные варианты осуществления изобретения не следует толковать как ограничивающие конкретные формы областей теми, что показаны на чертежах, но эти варианты должны рассматриваться как допускающие отклонения, например, в процессе производства. Например, область, показанная или описанная как плоская, обычно может иметь шероховатости и/или нелинейные участки. Помимо этого, показанные острые углы могут быть закруглены. Таким образом, области, показанные на чертежах, по существу являются схематическими представлениями, и не предполагается, что их формы изображены точно и ограничивают объем изобретения.
В этом описании раскрывается система управления и способ управления функционированием печи в энергоустановке, в которой используется процесс избирательного некаталитического восстановления (SCNR) ниже по потоку от печи таким образом, чтобы управлять дымовыми газами, образуемыми в печи и поступающими на вход процесса SNCR. Печь может входить в состав котла. Согласно одному из примеров осуществления настоящего изобретения печь является частью пылеугольного (PC) котла. В системе управления используется решение по оптимизации управления по нескольким переменным для обеспечения выброса NOx и проскока аммиака ниже регулируемых или промышленных предельных уровней и, в то же время, для минимизации эксплуатационных расходов на общую систему котла/SNCR.
Текущие зонтичные системы управления процессом SNCR для котла на ископаемом топливе содержат набор управляющих контроллеров PID, поддерживающих выполнение процесса SNCR. В данном изобретении для оптимизации рабочих характеристик SNCR используется контроллер, осуществляющий управление на основе модели (например, прогнозирующий по модели контроллер (МРС)). Ввиду того, что процессы управления топливом / воздушной средой печи и SNCR взаимосвязаны, желательно решать проблему оптимизации управления с точки зрения интегрированных SNCR и печи так, чтобы обеспечить решение по оптимальному управлению для объединенной системы печь - SNCR.
Таким образом, система управления включает структуру управления процессом оптимизации на основе модели как для печи, так и для процесса SNCR и, помимо других усовершенствованных механизмов, использует автоматическую настройку (адаптивную настройку) для дальнейшего улучшения средств управления на основе данных, сгенерированных в ходе выполнения процесса. Адаптивные средства управления и отказоустойчивые средства управления обычно рассматриваются как дополняющие друг друга структуры. Согласно раскрытию настоящего изобретения адаптивное управление интегрируется с отказоустойчивым управлением, в результате чего осуществляется управление автоматической настройкой с использованием таких способов оптимизации, как алгоритмы оптимизации по сгустку частиц (PSO, Particle Swarm Optimization), позволяющие улучшить структуры МРС с целью повышения качества управления системой.
Преимущество подробно описываемой здесь системы управления состоит в том, что подход, основанный на сочетании механизмов адаптивного и отказоустойчивого управления, упрощает управление, улучшает в целом его эффективность и повышает надежность интегрированных средств управления компонента печь-SNCR энергоустановки. Текущий процесс SNCR почти полностью основывается на использовании базовых контроллеров PID для управления объемом оксидов NOx, выпускаемых из энергоустановки. В настоящее время настройка с помощью контроллера PID и стандартного контроллера МРС основывается на способе ручной настройки. Автоматическая настройка с использованием усовершенствованного алгоритма оптимизации по сгустку частиц при малых затратах в значительной степени повышает эффективность настройки. В известном уровне техники интегрированные средства управления для печи и SNCR не используются.
В соответствии с одним из вариантов осуществления настоящего изобретения система управления содержит уровень прогнозируемого по модели управления (МРС, Model Predictive Control) для управления другими контроллерами, такими как пропорциональные интегрально-дифференциальные контроллеры (PID). Контроллер МРС называется диспетчером МРС, поскольку он наблюдает за информацией, передаваемой в энергоустановку контроллерами PID, и управляет этой информацией. В соответствии с другим вариантом осуществления изобретения некоторые или все контроллеры PID заменяются адаптивными контроллерами, способными модифицировать поведение системы на основе динамических изменений процесса и характера этих изменений во время работы энергоустановки. Вкратце, уровень диспетчера МРС и уровень PID и/или адаптивного управления находятся в отношении ведущий-ведомый, при этом уровень PID и/или уровень адаптивного управления является подчиненным по отношению к уровню МРС.
Согласно одному из вариантов осуществления изобретения на уровне диспетчера МРС используется отказоустойчивая логика, для того чтобы обеспечить диспетчерское управление уровнями PID и/или уровнями адаптивного управления. Отказоустойчивость представляет собой свойство, которое позволяет системе управления (и, следовательно, энергоустановке) продолжать корректное функционирование в случае отказа (одного или более отказов) некоторых из своих компонентов. Согласно одному из вариантов осуществления изобретения, если качество работы значительно снижается, то это снижение пропорционально серьезности отказа, в отличие от традиционно разработанных систем, в которых даже мелкие отказы могут вызвать выход из строя всей системы.
Согласно другому варианту осуществления изобретения система управления использует способы оптимизации, такие как оптимизация по сгустку частиц (PSO), для эффективной автоматической настройки (называемой также "автонастройкой") с целью выполнения уровнями МРС улучшенного диспетчерского управления уровнями PID и/или уровнями адаптивного управления. В этом варианте осуществления изобретения, который включает оптимизацию всех уровней управления, для точной настройки основных параметров МРС предлагается использовать алгоритм многоцелевой оптимизации по сгустку частиц (MOPSO, Multi-Objective Particle Swarm Optimization).
Согласно другому варианту осуществления изобретения используется подробно описываемая здесь система управления доставкой восстановителя NOx, поступающего в печь через впускной канал (или систему впускных каналов) в верхней части печи. Система управления упрощает управление высотой сопел, объемом или расходом восстановителя NOx, объемом или расходом воды и концентрацией восстановителя NOx, поставляемого в печь. Этот способ управления позволяет поддерживать в пределах установленных предельных значений выбросы NOx в атмосферу или проскок аммиака, которые могут произойти на энергоустановке вне зависимости от рабочих условий на этой установке.
Технология SNCR привлекательна благодаря низким капитальным и эксплуатационным расходам, простоте конструкции, системе, не использующей катализатора, простоте размещения в существующих энергосистемах, применимости ко всем типам стационарного оборудования с огневым нагревом, независимости в значительной степени от летучей золы и удобству использования с другими технологиями управления выбросом NOx. Процесс SNCR управляется в расположенных ниже по потоку секциях печи (например, в расположенных ниже по потоку секциях процесса сгорания в котле). В процессе функционирования системы сгорания в печи осуществляется контроль кислорода и ступенчатая подача воздуха, что влияет на распределение потоков дымового газа, температуры и мольную долевую концентрацию относительных соединений и радикалов в зонах реакции SNCR. Таким образом, желательно рассматривать не только непосредственно оптимизацию зонтичного процесса SNCR, но также применять интегрированную оптимизацию процессов сгорания в печи и SNCR с использованием подхода управления по нескольким переменным.
В соответствии с одним из вариантов осуществления настоящего изобретения система управления содержит контроллер МРС, который управляет множеством пропорциональных интегрально-дифференциальных контроллеров (PID) для обеспечения выполнения процесса SNCR.
На фиг. 1 и 2 показано схематическое представление примера системы 100, в которой используются один или более контроллеров МРС 102 для управления множеством пропорциональных интегрально-дифференциальных контроллеров (PID) 104, 106, 108, 110, 112, 114 и т.д. для обеспечения выполнения процесса SNCR в печи 204, которая контактирует с системой 202 обработки дымового газа. На фиг 1 показана упрощенная схема системы 100, которая подробно изображена на фиг. 2. Схема оптимизации управления общей интегрированной системой печь - SNCR показана на фиг. 2.
Система 202 обработки дымового газа расположена ниже по потоку от печи 204. Печь 204 гидравлически связана с турбиной (не показана на чертеже), которая используется для управления генератором (не показан на чертеже) для выработки энергии. Согласно одному из вариантов осуществления изобретения печь 204 может представлять собой часть пылеугольного (PC) котла. Требования к турбине определяют нагрузку печи, которая компенсируется различными способами, один из которых заключается в управлении объемом топлива, подаваемого в печь.
В печи 204 находится впускной канал 120 (также обычно называемый соплом), через который в печь вводится восстановитель NOx (например, аммиак или мочевина). Контроллеры PID 104, 106, 108, 110, 112, 114 электрически соединены с контроллером МРС 102, а также с водяным расходным баком 116 и расходным баком 118 с восстановителем NOx. Водяной расходный бак 116 и расходный бак 118 с восстановителем гидравлически связаны с печью 204 и находятся выше по потоку. Водяной расходный бак 116 обеспечивает воду, в то время как расходный бак 118 с восстановителем NOx обеспечивает восстановитель NOx, и оба этих компонента объединяются в требуемых пропорциях и вводятся в печь 204 через сопло 120 для уменьшения до требуемого уровня NOx в потоке дымового газа. Согласно варианту осуществления изобретения другой катализатор(ы) не используется в процессе уменьшения NOx. Желательное значение оксидов NOx, выпущенных в атмосферу, обычно не превосходит регламентированное значение, установленное природоохранными органами.
Контроллер МРС 102 содержит блоки моделирования, оценки и оптимизации, каждый из которых описан в заявке на патент США №8,755,916, содержание которой полностью включено в настоящую заявку посредством ссылки. Хотя контроллер МРС 102, показанный на фиг. 1, соединен с печью 204 через контроллеры PID 104, 106 108 110 и т.д., он может быть непосредственно связан с другими компонентами энергоустановки. Например, он может быть связан с любыми другими меньшими компонентами установки, например с печью, и может функционировать для управления этими меньшими компонентами установки.
В варианте осуществления изобретения, показанном на фиг. 1 и 2, контроллер МРС 102 принимает входные сигналы (X), относящиеся к объему оксидов NOx, выпущенных в потоке дымового газа на выходе печи, проскоку аммиака (Y) на выходе печи и нагрузке (Z) печи. Эти входные сигналы также называются переменными контроллера или переменными возмущения. Информация, полученная на основе этих входных сигналов, используется для наблюдения за функционированием соответствующих контроллеров PID.
Согласно одному из вариантов осуществления изобретения контроллер МРС 102 может содержать блок линейного или нелинейного динамического моделирования и имитации на основе первых главных уравнений, таких как баланс массы, импульса и энергии. Кроме того, в структуре гибридной динамической модели, которая объединяет упрощенные первые главные модели с моделями, управляемыми данными, используются эмпирические способы моделирования, такие как нелинейные нейронные сети. В примере осуществления настоящего изобретения контроллер МРС воздействует на компоненты системы управления энергоустановкой, например на имеющиеся пропорциональные интегрально-дифференциальные контроллеры (PID), для дополнения и/или замены текущих систем управления установкой на средства управления, прогнозирующие на основе модели, с возможностями оптимизации. Более конкретно, блок моделирования МРС 102 включает блок нелинейной модели установившегося состояния и один или более блоков линейной или нелинейной динамических моделей. Кроме того, модель установившегося состояния и/или динамическая модель могут применять способы адаптивного, нечеткого моделирования и/или моделирования с использованием нейронной сети, и/или первые главные способы моделирования для моделирования комплексных, нелинейных, многофазных потоков и химических реакций в энергоустановке на ископаемом топливе.
Как было указано выше, контроллер МРС 102 находится с контроллерами PID 104, 106, 108, 110, 112 и 114 во взаимоотношении "ведущий-ведомый". Контроллеры PID управляются контроллером МРС 102, то есть МРС 102 по отношению к PID выполняет функцию управления. Каждый из контроллеров PID содержит механизм управляющей цепи обратной связи (показанный на фиг. 2), который включает контроллер PID, манометр (или устройство измерения параметров потока) и клапан, активируемый информацией, принятой из контроллера PID. Контроллер PID рассчитывает величину ошибки как разность между измеренной переменной процесса и требуемым установленным значением. Контроллер пытается минимизировать ошибку путем регулировки процесса с использованием регулируемой переменной. В алгоритме PID задействованы три отдельных постоянных параметра, и он, соответственно, иногда называется трехчленным управлением с использованием пропорциональной, интегральной и дифференциальной величин, обозначаемых Р, I и D. Проще говоря, эти величины могут интерпретироваться в терминах времени: Р зависит от присутствующей ошибки, I - от накопления предшествующих ошибок, и D представляет собой прогнозирование последующих ошибок на основе текущей скорости изменения. Взвешенная сумма этих трех действий используется для регулирования процесса с помощью таких элементов управления, как позиция регулирующего клапана, амортизатор или мощность, подаваемая в нагревательный элемент.
Контроллер PID 104 принимает управляющую информацию об установленном значении NOx, в то время как контроллер PID 106 принимает из того же контроллера МРС 102 управляющую информацию о проскоке аммиака. Управляющая информация из контроллеров PID 104 и 106 затем подается в расходный бак 118 с восстановителем NOx. Контроллер PID 108 подает управляющую информацию о нагрузке печи, принятую из контроллера МРС 102, в водяной расходный бак 116, а также в расходный бак 118 с восстановителем NOx. Контроллер PID 110 подает импульсную управляющую информацию в сопла, используемые для ввода восстановителя NOx в печь, контроллер PID 112 подает информацию об установленном значении кислорода в систему регулирования подачи воздуха (не показана на чертеже), в то время как контроллер PID 114 подает информацию о стехиометрии зоны основной горелки (MBZ, Main Burner Zone). Хотя на фиг. 1 показано шесть контроллеров PID, контроллер МРС может предоставлять информацию семи или более контроллерам PID. Согласно варианту осуществления изобретения контроллер МРС может предоставлять управляющую информацию еще одному контроллеру PID, который управляет перепадом давления (DP, Differential Pressure) в воздушном коробе/печи.
Контроллеры PID предоставляют управляющую информацию для клапанов (не показанных на фиг. 1, но изображенных на фиг. 2), которые управляют отношением воды к восстановителю NOx в сопле 120. Каналы, по которым поступает вода и восстановитель NOx, также оснащены манометрами (не показанными на чертеже), которые подают информацию обратной связи в контроллеры PID.
В целом, как показано на фиг. 1, контроллеры PID позволяют управлять регулируемыми переменными, сгенерированными контроллером МРС, такими как отклонение распределения потока мочевины, отклонение общего несущего водного потока, высота (высоты) впрыскивания сопел, частота/амплитуда пульсации воды, отклонение от установленного значения NOx, отклонение от установленного значения избыточного кислорода, отклонение от установленного значения стехиометрии зоны основной горелки, отклонение от установленного значения перепада давления в воздушном коробе/печи и т.п., или их комбинация. Контроллер МРС управляет общими ограничениями в системе 100, такими как выпуск NOx, проскок аммиака, уровень (уровни) распределения температуры в зоне реакции, с учетом переменных возмущения, таких как требования к нагрузке печи.
Как указывалось выше, контроллер МРС может содержать блок оценки, который может использоваться для оценки переменных состояния, таких как уровень и распределение температуры в зоне реакции SNCR, распределения NO, NO2 и NH3 в зоне реакции SNCR, уровень и распределение O2 в зоне реакции SNCR, конфигурация и распределение потока в зоне реакции SNCR, продолжительность обработки и т.п. Переменные состояния могут оцениваться с использованием либо блока (блоков) оценки на основе динамических моделей анализа в пространстве состояний, либо механизмов обратного вычисления, основанных, например, на вычислительных гидродинамических моделях (дифференциальных уравнениях в частных производных, дифференциальных алгебраических уравнениях и т.п.). Для измерения таких переменных состояния процесса желательно использовать системы физических датчиков, однако их может не быть. Системы физических датчиков, которые позволяют измерять часть перечисленных переменных для предоставления начальных и граничных условий, могут быть полезны при численной реконструкции распределения температур, параметров потока и компонентов дымового газа в зоне реакции.
На фиг. 2 более подробно показана система, изображенная на фиг. 1. На фиг. 2 показаны дополнительные контроллеры PID 122 и 124, которые электрически связаны с контроллерами PID 104 и 106. Эти контроллеры PID 122 и 124 электрически связаны с клапанами, которые определяют объем раствора мочевины (восстановителя 118 NOx), поступающего (совместно с водой из водяного расходного бака 116) в сопла 120 в печи 204. Импульсная система управления (см. параметры пульсации (D)) и информация о нагрузке печи, получаемая из контроллера МРС 102, электрически соединена с клапанами, которые управляют объемом воды, поступающей из водяного расходного бака. Как показано на фиг. 2, система 100 содержит ряд клапанов и манометров, которые электрически или гидравлически связаны с контроллерами PID для улучшения управления процессом уменьшения NOx.
На фиг. 3 показана система 100, изображенная на фиг. 2, в которой некоторые контроллеры PID заменены адаптивными контроллерами. Если сравнить фиг. 2 и 3, то можно заметить, что контроллеры PID 110, 122, 124 и 108 заменены адаптивными контроллерами 310, 322, 324 и 308, соответственно. В целом, контроллер PID представляет собой контроллер, основанный на определении ошибки, который реагирует только на отклонение переменной процесса от своего установленного значения. Контроллер PID также является контроллером с одним входом и одним выходом (SISO, Single-Input-Single-Output), то есть он просто следит за переменной процесса в цепи управления и не учитывает поведение других переменных процесса в других цепях управления. Однако между определенными переменными процесса в энергоустановке, безусловно, существует сложное взаимодействие и взаимосвязь, которые не могут простым образом обрабатываться контроллерами PID.
Упомянутый выше контроллер МРС сконструирован для сбора характеристик в различных цепях обратной связи и регулировки соответствующих установленных значений с целью поиска оптимальной рабочей точки. Контроллеры PID могут не обеспечивать требуемую быструю реакцию. Для повышения эффективности каждой отдельной петли управления вместо стандартных контроллеров PID могут применяться адаптивные контроллеры PID или контроллеры PID с адаптивными механизмами.
Как показано на фиг. 3, адаптивные контроллеры заменяют некоторые типовые контроллеры PID, показанные на фиг. 2. Адаптивный контроллер является контроллером, который может модифицировать свое поведение в ответ на изменения динамических свойств процесса и характера помех. Адаптивный контроллер становится нелинейным благодаря механизму регулировки параметров. Сущность адаптивного контроллера заключается в способе регулировки своих параметров для соответствия требованиям изменяющейся среды управления. Адаптивный контроллер содержит самонастраивающиеся адаптивные средства управления, нейроадаптивные средства управления, нейронную сеть (NN, Neural Network), вейвлетную сеть или их комбинацию.
Адаптивные контроллеры 308, 310, 322 и 324 могут использоваться для управления цепями обратной связи, которые связаны с помощью двух различных средств. Эти средства описываются ниже со ссылкой на фиг. 4 и 5. В одном из способов задействуется алгоритм регулировки параметров для обновления параметров управления в соответствии с рабочими условиями, как показано на фиг. 4. Преимущество такой структуры состоит в том, что по-прежнему остаются исходные контроллеры PID, в то время как их параметры обновляются с помощью алгоритма регулировки параметров. Другой вариант состоит в замене контроллеров PID на усовершенствованные адаптивные контроллеры, такие как адаптивные контроллеры L1, показанные на фиг. 5. В такой интегрированной структуре можно одновременно реализовать схему и выполнение адаптивного алгоритма и регулировки управляющего выхода. Сущность структуры адаптивного механизма для процесса SNCR состоит в улучшении реакций критических переменных процесса и в быстром и стабильном достижении цели управления.
Как показано на фиг. 4, система 400 содержит установку 404, которая включает, помимо прочих компонентов, печь и систему обработки дымового газа. Выходная информация (например, содержание NOx, проскок аммиака, нагрузка печи и т.п.) из установки возвращается по цепи обратной связи в модуль 406 регулировки параметров и в контроллер 402. Согласно одному из вариантов осуществления изобретения установка 404, контроллер 402 и модуль 406 регулировки параметров функционально связаны друг с другом. В соответствии с другим вариантом осуществления настоящего изобретения установка 404, контроллер 402 и модуль 406 регулировки параметров связаны друг с другом электрически и/или гидравлически. Между контроллером 402 и модулем 406 регулировки параметров также существует вторая цепь обратной связи.
Установка 404 принимает эксплуатационную информацию из контроллера 402. Согласно одному из вариантов осуществления изобретения эксплуатационная информация включает информацию об установленных значениях (помимо прочих параметров управления), либо запрограммированных непосредственно в контроллере 402, либо, в альтернативном варианте, полученных из контроллера МРС (не показан на чертеже). Как показано на фиг. 4, информация об установленных значениях, принимаемая из контроллера 402, дополняется информацией о параметрах управления, принимаемой из модуля 406 регулировки параметров. Модуль 406 регулировки параметров использует алгоритм регулировки параметров для обновления параметров управления, таких как установленное значение, в соответствии с рабочими условиями, в то время как контроллер сохраняет исходные рабочие установленные значения. Преимущество использования этого режима адаптивного управления заключается в том, что управляющая информация может регулироваться в процессе работы установки (без каких-либо простоев) с целью компенсации различных сценариев выполнения процесса (например, отличие условий нагрузки, изменения в местной законодательной базе и т.п.).
На фиг. 5 показан другой сценарий адаптивного управления, в котором контроллеры PID заменены усовершенствованными адаптивными контроллерами. Как показано на фиг. 5, установка 404 электрически и/или гидравлически связана с модулем 408 алгоритма управления, модулем 412 адаптивного алгоритма и модулем 414 прогнозирования состояний. Модуль 408 алгоритма управления находится в первой цепи обратной связи с установкой 404 и во второй цепи обратной связи с модулем 414 прогнозирования состояний и модулем 412 адаптивного алгоритма. Модуль 412 адаптивного алгоритма и модуль 414 прогнозирования состояний находятся друг с другом в третьей цепи обратной связи. Управляющие инструкции, принятые из контроллера 412 адаптивного алгоритма, могут фильтроваться перед приемом модулем 408 алгоритма управления.
Модуль 408 алгоритма управления предоставляет входную информацию u(t) для установки 404. Входная информация u(t) состоит из выходной информации x(t), принятой из установки 404, информации σ'(t) адаптивного алгоритма, полученной из модуля 412 адаптивного алгоритма, которая включает выходную информацию x(t) и информацию x'(t) прогнозирования состояний, полученную из модуля 414 прогнозирования состояний. Модуль 408 алгоритма управления также принимает установленное значение r(t) в качестве независимой информации о процессе. Входная информация u(t), принятая установкой 404 из модуля 408 алгоритма управления, представляет собой, таким образом, сумму выходной информации x(t), информации σ'(t) модуля адаптивного алгоритма, информации x'(t) прогнозирования состояний и установленного значения r(t). Информация σ'(t) модуля адаптивного алгоритма, информация x'(t) прогнозирования состояний и установленное значение r(t) могут использоваться для улучшения управления процессом во время работы установки с целью компенсации различных сценариев выполнения процесса (например, отличие условий нагрузки, изменения в местной законодательной базе и т.п.).
В этой структуре интегрированного типа можно одновременно обеспечить схему и реализацию адаптивного алгоритма и регулировки управляющего выхода. Сущность структуры адаптивного механизма для процесса SNCR состоит в улучшении реакции критических переменных процесса и в быстром и стабильном достижении цели управления.
Адаптивный механизм может применяться к реализации прогнозируемого по модели управления для системы печь - SNCR. Мотивацией для этой заявки служит плохая эффективность начальной модели при наличии изменений в системе. Например, прогнозируемое по модели управление обычно используется каскадно с контроллерами PID. Настройка контроллеров PID изменяет динамические характеристики системы и, таким образом, оказывает влияние на точность прогнозирования по модели. Ручная перенастройка и/или перестройка модели может оказаться затратной, что ограничивает эффективность МРС.
Объединение прогнозируемого по модели управления и адаптивного механизма предназначено для улучшения эффективности системы управления, содержащей один контроллер МРС. Как показано на фиг. 6, адаптивный механизм обеспечивает оценку эффективности прогнозируемого по модели управления на основе текущих измерений, и этот механизм активируется, как только разность между прогнозом по модели и результатом измерения превышает допустимое отклонение. Как показано на фиг. 6, диспетчер 103 прогнозируемого по модели управления находится в цепи обратной связи с прогнозирующим по модели контроллером 102, показанным на фиг. 1, 2 и 3. Согласно одному из вариантов осуществления изобретения диспетчер 103 прогнозируемого по модели управления принимает информацию, относящуюся к регулируемым переменным, и измеряет соответствующую информацию, относящуюся к управляемым переменным и переменным возмущения. Если информация, относящаяся к регулируемым переменным, управляемым переменным или переменным возмущения чрезмерно изменяется по сравнению с заданными величинами, то диспетчер 103 прогнозируемого по модели управления осуществляет повторную калибровку соответствующих параметров для прогнозирующего по модели контроллера 102. Регулируемые переменные, управляемые переменные либо переменные возмущения могут переустанавливаться в зависимости от амплитуды и направления отклонения от заданных значений.
Успешное выполнение любого приложения прогнозируемого по модели управления зависит от того, насколько хорошо модель процесса подходит для целей управления. Необходимо искать компромисс между точностью модели процесса и постоянным обновлением модели, для того чтобы обеспечить непрерывное выполнение прогнозируемого по модели управления в приемлемом диапазоне с минимальным количеством обновлений модели. В терминах сопровождения модели важно обеспечить режим, в котором контроллер не возбуждает некорректно смоделированные высокочастотные динамические характеристики. Модель должна обладать точностью в пределах полосы частот системы.
В целом, обслуживание прогнозирующего по модели контроллера 102 диспетчером 103 прогнозируемого по модели управления позволяет реализовать механизм для регулировки начальных моделей таким образом, чтобы они обеспечивали лучшее соответствие процессу, а также могли компенсировать изменения, которые могут происходить в ходе выполнения процесса, путем адаптации параметров модели в диапазоне частот, необходимом для достижения компромисса между эффективностью и надежностью работы прогнозирующего по модели контроллера.
Как указывалось выше, в системе 100 также могут применяться отказоустойчивые механизмы. Отказ определяется как недопустимое отклонение по меньшей мере одного характеристического свойства переменной от приемлемого поведения или характеристики. Таким образом, отказ представляет собой состояние, которое может привести к сбою или выходу системы из строя. Целью отказоустойчивого механизма является указание на нежелательные или недопустимые состояния процесса и принятие соответствующих мер, позволяющих системе в случае частичной неисправности компонентов продолжать, возможно, на пониженном уровне, намеченную работу без полного отключения системы.
Отказоустойчивая структура позволяет системе продолжать, возможно, на пониженном уровне, намеченную работу, и не отключаться полностью, в случае неисправности некоторых частей системы. Термин используется для описания компьютерных систем, разработанных для продолжения в той или иной степени полнофункциональной работы, возможно со снижением производительности или увеличением времени отклика, в случае возникновения некоторых частичных неисправностей. Другими словами, система в целом (то есть энергоустановка) не прекращает функционирование из-за проблем, возникающих либо с аппаратным, либо с программным обеспечением.
В пределах отдельной системы отказоустойчивость может достигаться путем предупреждения исключительных условий и построения системы, которая бы могла противодействовать им, и, в целом, - направлена на достижение саморегулируемости таким образом, чтобы восстанавливать безошибочное состояние. Однако, если последствия системной неисправности являются катастрофическими, или затраты на то, чтобы обеспечить достаточный уровень надежности, слишком велики, наилучшим решением может быть использование некоторых форм дублирования. В любом случае, если последствия системной ошибки столь катастрофические, система способна использовать возврат к безопасному режиму. Восстановление может представлять собой откат, включающий действия пользователя, если участие пользователей предусмотрено в цикле возврата.
Для того чтобы обеспечить работоспособность процесса с определенным уровнем отклонения, в первую очередь требуется обнаружить наличие отказа и определить, в каком месте системы он произошел. Например, основанная на модели технология обнаружения отказа предназначена для обнаружения отказа процесса путем использования определенного типа модели, как показано на фиг. 7. Раннее обнаружение небольших отказов включает определение резкого характера изменений во времени, диагностику отказов в исполнительном механизме, компонентах процесса или датчиках, а также обнаружение отказов в замкнутых циклах.
На фиг. 7 показана базовая структура обнаружения отказов на основе модели. На основе измеренных входного сигнала U и выходного сигнала Y алгоритм обнаружения генерирует остаточную разность между моделью и процессом. Блок-схема, показанная на фиг. 7, может применяться к любому исполнительному механизму (такому как клапан или насос, используемый в энергоустановке, показанной на фиг. 1, 2 и/или 3). Как показано на фиг. 7, входной сигнал U, подаваемый на исполнительный механизм 702, генерирует в исполнительном механизме отклик Y, который либо находится в пределах, предполагаемых контроллером (не показан на чертеже), либо выходит за эти пределы. Отклик из исполнительного механизма 702 обнаруживается датчиком 706. Если отклик выходит за предполагаемые пределы, то принимается решение о том, что этот отклик ошибочный, и система пытается диагностировать причину отказа, а именно, вызван ли этот отказ исполнительным механизмом 702, процессом 704 или датчиком 706. Отказоустойчивые модели могут применяться к любым контроллерам (то есть контроллеру МРС, контроллеру PID и/или адаптивным контроллерам), показанным на фиг. 1, 2 и 3.
Входной сигнал U и выходной сигнал Y также передаются в модель процесса, которая генерирует требуемые характеристики для управления системой. В результате генерации характеристик процессу 704 и датчику 706 предоставляется информация для определения, произошел ли отказ.
Целью генерации характеристик является обнаружение параметров модели и оцененных состояний. Если остаток находится в пределах заранее заданного допуска, то процесс по-прежнему может выполняться с запасом надежности. Если остаток превышает допуск, обнаруживается и диагностируется отказ системы с целью выработки инструкций для дальнейшего осуществления управления и/или операций.
Для управления и функционирования SNCR и системы печь - SNCR, (основанная на модели) отказоустойчивость может обеспечивать индикацию текущего рабочего состояния, а также предоставлять дополнительные решения для текущих средств управления при наличии системных отказов. Ввод в действие такой системы позволяет поддерживать функционирование в безопасном диапазоне в течение более длительного периода времени.
Согласно одному из вариантов осуществления настоящего изобретения вышеупомянутые контроллеры могут автоматически настраиваться с использованием способа, основанного на оптимизации по сгустку частиц (PSO) и реализованного в средстве настройки оптимизации. PSO представляет собой способ стохастической оптимизации, основанный на имитации социального поведения птичьих или рыбьих стай. В алгоритме используется роевой интеллект для нахождения наилучшего местоположения в пространстве поиска. Предлагаемая автонастройка по этой схеме может проводиться с помощью двух шагов. PSO может применяться к любому из контроллеров (то есть к контроллеру МРС, контроллеру PID и/или адаптивным контроллерам), показанным на фиг. 1, 2 и 3. Этот способ может использоваться для автоматической настройки любых управляющих операций (то есть для управления исполнительными механизмами, датчиками и т.п.), выполняемых вышеупомянутыми контроллерами.
Первый шаг может осуществляться путем имитации, если доступна динамическая модель (модели). Второй шаг предназначен для выполнения настройки в интерактивном режиме. В структурах вышеупомянутой системы управления, в которой задействованы контроллеры МРС и PID (например, показанные на фиг. 1, 2 и 3), настройка может выполняться путем начальной настройки контроллера PID с последующей настройкой контроллеров МРС и, наконец, - путем одновременной настройки параметров общей системы управления MPC/PID.
Целевые функции требуется устанавливать по-разному для каждого из трех случаев (при этом в первом случае задействуется настройка контроллера PID, во втором случае задействуется настройка контроллера МРС, и в третьем случае задействуется одновременная настройка параметров общей системы MPC/PID). В первом случае, при настройке PID, проблема оптимизации определяется для одновременного нахождения наилучшего набора параметров управления для каждого контроллера PID с целью получения оптимальной эффективности управления (наименьшая ошибка относительно установленного значения, минимальная длительность переходного процесса, минимальное отклонение регулируемой величины от заданного значения и т.п.) для всех управляющих контроллеров PID. После точной настройки PID алгоритм автонастройки, основанный на оптимизации PSO, применяется к уровню диспетчерского управления МРС для оптимизации целевых весовых констант и изменяющихся горизонтов прогнозирования и управления МРС. PSO активирует МРС для максимизации своей эффективности в условиях определенных системных ограничений. После шагов отдельной настройки PID и МРС выполняется оптимизация интегрированной структуры управления PC-SNCR MPC/PID для добавления взаимодействия, которое не учитывается в процессе каждой из отдельных настроек. Цель оптимизации заключается в объединении общих требований к эффективности управления и достижении компромисса между эффективностью настройки PID и МРС. Автонастройка может в значительной степени сэкономить время ввода в эксплуатацию, и в результате она дешевле других способов управления. Кроме того, оптимально настроенные контроллеры могут поддерживать улучшенное и более устойчивое управление. Алгоритм автонастройки PSO показан на фиг. 8.
С помощью PSO можно одновременно настраивать МРС и PID для достижения оптимальной эффективности управления. Основанная на оптимизации PSO настройка протестирована на имитаторе динамических характеристик печи и оборудовании испытания сжигания в печи. Алгоритм PSO обладает следующими преимуществами: i) для его реализации требуется только несколько строк компьютерного кода, ii) способ поиска, основанный не на градиентной информации, а на величинах целевой функции, упрощает использование алгоритма, iii) он не дорогой с точки зрения вычислений, поскольку для него требуется небольшой объем памяти и невысокая скорость CPU, iv) в отличие от обычных детерминистических способов решения проблемы эффективности, этот алгоритм не требует строгих предположений, таких как линейность, дифференцируемость, выпуклость, отделимость или отсутствие ограничений, и v) его решение не зависит от начальных состояний частиц, что может обеспечивать значительное преимущество при решении проблем инженерного проектирования на основе подходов оптимизации.
Преимущество раскрываемой в этом описании системы управления состоит в том, что она может настраиваться для работы в существующих энергоустановках, которые содержат другие системы управления. Вкратце, она может использоваться в старых энергоустановках, в которых отсутствует подробно описываемое оборудование управления, или, в альтернативном варианте, она может настраиваться для работы в энергоустановках, в которых оборудование управления установлено частично (например, только контроллеры PID).
Раскрываемая в этом описании система может использоваться для управления объемом оксидов NOx, образуемых в печи котла. Котлы содержат трубчатые стены, ограничивающие внутреннее пространство; топливо, такое как уголь, нефть, отходы, подается во внутреннее пространство печи и сжигается с использованием окислителя, например воздуха или кислорода. В процессе сгорания образуются дымовые газы, обогащенные оксидами NOx, объем которых нужно уменьшить ниже регулируемых пределов, перед их выпуском в атмосферу.
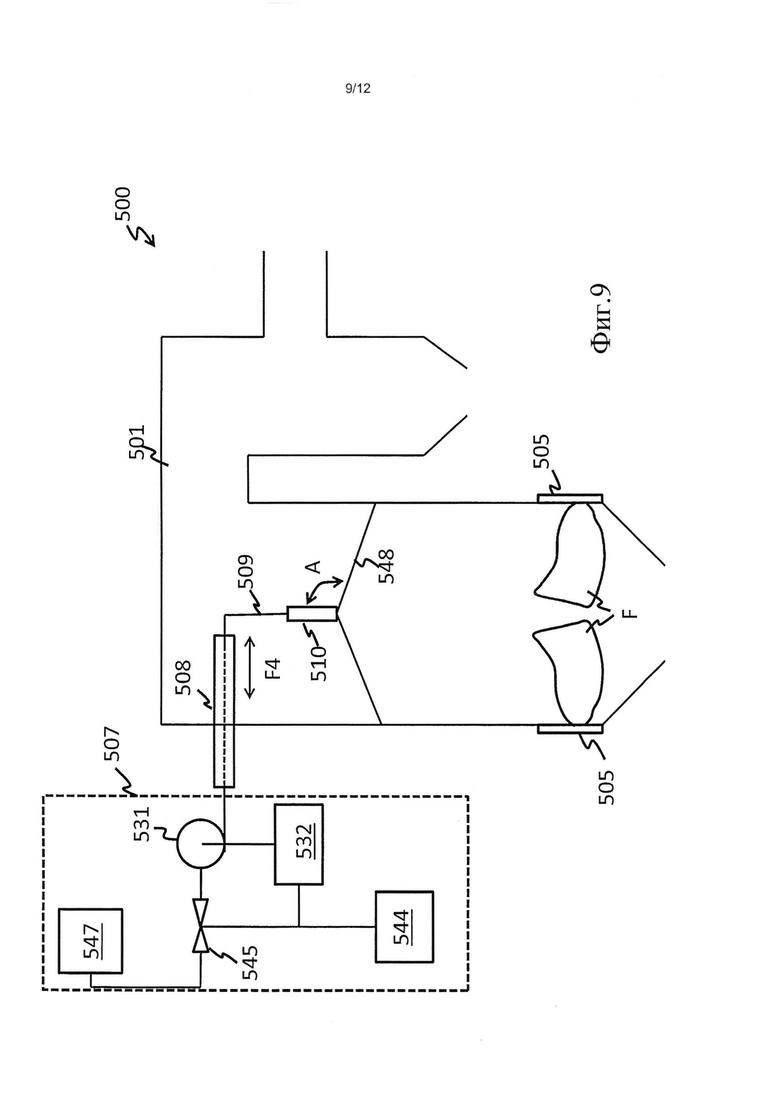
На фиг. 9 показан один из примеров варианта осуществления котла, оснащенного системой 500 для уменьшения NOx, через которую в котел вводится восстановитель для уменьшения объема оксидов NOx, выделяемых в атмосферу. Различные структурные и рабочие характеристики системы 500 подробно описываются в патентах США № Р14/350-0, Р14/394-0 и Р14/395-0, которые поданы одновременно и содержание которых полностью включено в настоящую заявку посредством ссылки. Система для уменьшения NOx управляется вышеупомянутой системой 100 управления, показанной на фиг. 1-8.
В состав системы 500 входит котел 501, содержащий боковые трубчатые стены 502, ограничивающие внутреннее пространство 503, и кровлю 504. Топливо, такое как уголь, и окислитель, например воздух или кислород, подаются в котел через горелки 505.
Котел также оснащен устройством 507 для избирательного некаталитического восстановления (SNCR); устройство 507 содержит трубу 508, через которую пропускается шланг 509, оснащенный по меньшей мере соплом 510; как показано на чертеже, предпочтительно сопло находится в конечной части шланга, которая располагается во внутреннем пространстве 503. Устройство 507 также содержит механизм 511 управления шлангом в трубе 508. Хотя на фиг. 9 показан пример двухпроходного котла, в котором устройство 507 связано с первым проходом, следует отметить, что может использоваться котел любого типа, и устройство 507 может располагаться в любом месте, в котором температуры достаточны для корректного выполнения реакции избирательного некаталитического восстановления. Предпочтительно, труба 508 проникает во внутреннее пространство 503 из боковой трубчатой стены 505 котла. Таким образом, длина шланга, размещенного во внутреннем пространстве 503, меньше, чем в том случае, если бы труба свисала с кровли 504 котла, вследствие чего реактив, проходящий через шланг в процессе функционирования, не испаряется или по меньшей мере не подвергается испарению в значительной степени, перед тем как он достигнет сопла 510. Предпочтительно труба 508 располагается по существу горизонтально во внутреннем пространстве 503. Система 500 также содержит расходный бак 547 с восстановителем NOx, заполненный раствором аммиака или мочевиной с водой.
Топливо и окислитель подаются во внутреннее пространство 503, и топливо сжигается, в результате чего образуется пламя F и дымовой газ G, который выпускается через котел. Дымовой газ содержит оксиды NOx (в основном NO и в меньших объемах NO2), которые необходимо, по меньшей мере частично, удалить. Труба 508 вводится во внутреннее пространство 503 через боковое отверстие боковой трубчатой стены 502; отверстие может использоваться для различных целей, например в качестве смотрового отверстия или специализированного отверстия. Из трубы 508 шланг 509 и сопло 510 свисают во внутреннее пространство 503. Позиция сопла может регулироваться как по горизонтали, так и по вертикали. Позиция сопла 510 регулируется по вертикали для впрыскивания восстановителя NOx в области, в которых температура наилучшим образом подходит для реакции избирательного некаталитического восстановления. Вертикальная регулировка может выполняться путем управления мотором 532, приводящим в действие колеса 531 (то есть шкив) для протягивания/вытягивания шланга 509 через трубу 508. Это позволяет требуемым образом регулировать вертикальную позицию сопла 510 в пространстве 503 для уменьшения выбросов NOx в атмосферу.
Существуют различные возможности впрыскивания восстановителя NOx через сопло 510. Предпочтительно реактив впрыскивается через коническую поверхность 548, например через прорезь, однако он также может впрыскиваться через множество форсунок с одним отверстием, каждое из которых находится на конической поверхности. Предпочтительно угол А между шлангом 509 и потоком, впрыскиваемым через сопло 510, находится в диапазоне 0°<А<180°, но более предпочтительно этот угол находится в диапазоне 90°<А<180°. Поперечное сечение профиля впрыскивания восстановителя NOx, если смотреть со стороны нижней части печи, может представлять собой круг, эллипс, квадрат, прямоугольник или многоугольник (с числом сторон n=4 или более). Кроме того, могут использоваться другие геометрические формы поперечного сечения, охватывающие противолежащие конические сечения, противолежащие треугольные сечения и т.п. Если используется круговое поперечное сечение, процесс SNCR называется процессом "зонтичного SNCR".
Впрыскивание предпочтительно осуществлять через коническое пространство 48, определяющее угол А в диапазоне 90°-180°, поскольку это позволяет распылять реактив в областях с равномерной температурой. Фактически, во внутреннем пространстве 503 температура уменьшается ближе к боковым трубчатым стенам 502 и в верхнем направлении (то есть в отдалении от пламени); таким образом, изотерма имеет форму колокола с краями, направленными вниз вблизи боковых трубчатых стен 502. Таким образом, впрыскивание через коническое пространство, в направлении вниз, с вершиной в верхней части позволяет реактиву, в отличие от других конфигураций, пересекать дымовой газ, температура которого по существу равномерна или в большей степени равномерна.
Вышеупомянутая система 544 электрически и/или гидравлически связана с клапаном 545, который гидравлически связан с расходным баком 547 с восстановителем NOx. Система 544 управления также электрически связана с мотором 532, который взаимодействует со шкивом 531, регулирующим вертикальную позицию сопла 510 через трубу 508.
Вышеупомянутая система управления позволяет изменять объем восстановителя NOx, а также концентрацию восстановителя в водном носителе, который вводится в пространство 503 котла с помощью клапана 545. Кроме того, высота сопла 510 может управляться посредством мотора 532 и колеса 531.
Согласно одному из вариантов осуществления поддержания, как показано на фиг. 2 и 3, система управления управляет пульсирующей подачей восстановителя NOx в пространство 503 котла. Преимущество использования системы для уменьшения NOx совместно с системой управления, раскрываемой в этом описании, состоит в том, что она может настраиваться для работы в существующих энергоустановках.
Хотя на фиг. 9 показано распыляющее восстановитель NOx сопло 510, расположенное вдоль оси по длине котла 501, возможны другие местоположения сопла в котле, которые могут использоваться для равномерного и более эффективного удаления NOx из потока дымового газа. Согласно одному из вариантов осуществления изобретения может использоваться множество различных сопел, расположенных в различных позициях котла и упрощающих эффективное и равномерное поглощение NOx из потока дымового газа.
На фиг. 10(A) и 10(B) показаны различные конфигурации распыления восстановителей NOx (если смотреть вниз над распыляющим соплом или с верхней точки котла), обычно используемые в котлах. На фиг. 10(A) показано множество сопел, расположенных в стене котла, каждое из которых выводит распылитель, уменьшающий NOx, в области 602 треугольного поперечного сечения, если смотреть над распыляющим соплом. На фиг. 10(B) показано множество сопел, расположенных вдоль центральной оси, разделяющей котел на две половины по длине (l), и каждое из этих сопел выводит распылитель, уменьшающий NOx, в области 604 кругового поперечного сечения, если смотреть над распыляющим соплом.
На фиг. 11 показана гибридная конфигурация сопел, в которую включены оба местоположения сопел - сопел, расположенных в стенах печи, а также вдоль оси по длине печи. На фиг. 11 показан разрез печи, оснащенной множеством сопел, расположенных в боковых стенах печи, которые формируют область 602 треугольного сечения, если смотреть над распыляющим соплом, при этом в то же время печь оснащена множеством сопел, расположенных вдоль оси по длине печи, и каждое из этих сопел выводит распылитель, уменьшающий NOx, в области 604 кругового поперечного сечения, если смотреть над распыляющим соплом. Показанная на фиг. 11 высота "h" между двумя различными конфигурациями распыления может регулироваться путем изменения высоты распыляющих сопел, как подробно разъяснялось со ссылкой на фиг. 9. Система управления, описанная выше, может использоваться для управления интенсивностью распыления из различных сопел (например, различные сопла могут распылять восстановитель NOx с различными скоростями, различными частотами пульсации и/или различными концентрациями) в зависимости от их местоположений.
Геометрическая объединенная конфигурация распыления, если смотреть над распыляющими соплами, показана на фиг. 12(A). Объединенная конфигурация распыления представляет собой комбинацию треугольников (формируемых распыляющими соплами в стенах) и кругов (формируемых распыляющими соплами, расположенными по оси). Эта конкретная конфигурация распыления удобна, поскольку наибольшая концентрация восстановителя NOx сфокусирована в центре котла, где максимальна концентрация NOx, и концентрация восстановителя NOx уменьшается по направлению к стенам котла, где концентрация NOx минимальна. Вкратце, эта конфигурация позволяет добиться большей концентрации восстановителя NOx в центре, а не у стен котла.
На фиг. 12(B) показан пример схемы линий поставки для управления и доставки восстановителя NOx в печь при использовании гибридной конфигурации распыления с целью уменьшения оксидов NOx, образованных в печи. Линия 608 представляет собой трубопровод для жидкости, который доставляет восстановитель NOx в сопла в стене, которые расположены вдоль оси, как подробно показано на фиг. 12(A), в то время как линия 610 является линией электросвязи, которая устанавливает соединение между клапанами и системой управления. Система управления определяет содержимое распылителя, расход, частоту распыления и объем распылителя, доставляемого из сопел в стене, а также из сопел на осевой линии. Различные параметры распылителя, определяемые системой управления, основаны на измерениях NOx и проскока аммиака, выполненных в местоположении выпуска дымового газа, и последующих командах контроля, принятых из управляющего контроллера МРС. Расход во всей системе может управляться общим клапаном 620, который при необходимости может быть включен, выключен или может находиться в промежуточной позиции. Хотя клапан 620 (или его эквивалент), который управляет общим расходом восстановителя NOx, поступающего в печь, не показан на фиг. 1, 2 и 3, предполагается, что он также входит в состав системы.
Согласно варианту осуществления настоящего изобретения система управления может использоваться для доставки одного из двух распылителей в пульсирующем формате, в то время как другой распылитель непрерывно доставляется в печь. Частота пульсации двух распылителей также может изменяться. В соответствии с вариантом осуществления настоящего изобретения частота пульсации одного из распылителей может быть выше, чем у другого. Согласно другому варианту осуществления настоящего изобретения подача из одного из двух распылителей может прекращаться, в то время как другой может функционировать для уменьшения объема оксидов NOx, выделяемых в атмосферу. Управление функционированием распылителей также может выполняться другим образом: из сопел на боковой стене осуществляется треугольное распыление, в то время как включено зонтичное распыление, и наоборот.
Если обычные системы для удаления NOx (в которых восстановитель NOx доставляется из сопел в боковых стенах) устраняют от 20 до 50% массовой доли оксидов NOx, находящихся в потоке дымового газа, печи с гибридными конфигурациями могут устранять от 40 до 60% массовой доли оксидов NOx, находящихся в потоке дымового газа. Система доставки NOx (с помощью сопел, расположенных в стенах и по оси) и система управления, которая создает гибридную конфигурацию, могут настраиваться для работы в существующих энергоустановках. Например, если печь оснащена соплами в боковых стенах, она может быть настроена для использования сопел вдоль оси, или наоборот. Система управления (с уровнем диспетчера МРС и подчиненным адаптивным уровнем управления/PID, подробно описанными выше) может затем добавляться в систему для уменьшения NOx для существенного улучшения возможностей устранения NOx в энергоустановке при одновременном повышении ее эффективности.
Преимущество системы управления, раскрытой в этом описании, заключается в структуре управления процессом оптимизации на основе модели как для печи, так и для процесса SNCR и в использовании автоматической настройки (адаптивной настройки), помимо других усовершенствованных механизмов управления, для дальнейшего улучшения средств управления на основе данных, сформированных в ходе выполнения процесса. Адаптивные и отказоустойчивые средства управления, которые обычно используются в качестве отдельных конструкций управления, объединяются друг с другом для повышения общей эффективности и надежности интегрированных средств управления компонента печь-SNCR в энергоустановке. Интеграция адаптивных средств управления с отказоустойчивыми средствами управления и алгоритмами оптимизации по сгустку частиц улучшают конструкцию МРС и обеспечивают повышенное качество управления системой с меньшими затратами путем применения некаталитического восстановления NOx.
Следует отметить, что все указанные в этом описании диапазоны включают предельные значения. Цифровые величины различных диапазонов комбинируются.
Термин "содержащий" включает в себя термины "состоящий из" и "состоящий главным образом из".
Термин "и/или" включает в себя как "и", так и "или". Например, "А и/или В" интерпретируется как А, В или А и В.
Хотя изобретение было описано со ссылкой на некоторые варианты его осуществления, специалистам в этой области техники должно быть понятно, что могут быть произведены различные изменения, и элементы могут быть заменены другими эквивалентными элементами в пределах сущности изобретения. Кроме того, в вариантах осуществления настоящего изобретения может быть сделано множество изменений в пределах сущности изобретения для адаптации к конкретной ситуации или имеющимся средствам. Следовательно, подразумевается, что изобретение не должно быть ограничено конкретными вариантами его осуществления, раскрытыми в качестве предпочтительных вариантов осуществления изобретения, и включает в себя все варианты осуществления изобретения, охватываемые приложенной формулой изобретения.
Изобретение относится к области управления печами для сжигания топлива. Система управления для уменьшения NOx в энергоустановке содержит прогнозирующий по модели контроллер, пропорциональный интегрально-дифференциальный контроллер и/или адаптивный контроллер, которые подчинены прогнозирующему по модели контроллеру, функционально связаны с ним и содержат цепь обратной связи. В изобретении также содержится система для уменьшения NOx, содержащая расходный бак с восстановителем NOx и водяной расходный бак. При этом печь для сжигания топлива расположена ниже по потоку от системы для уменьшения NOx и оснащена множеством сопел, гидравлически связанных с системой для уменьшения NOx. Система управления электрически связана с системой для уменьшения NOx. Технический результат – уменьшение количества NOx в отходящих от печи газах. 3 н. и 22 з.п. ф-лы, 12 ил.
1. Система управления для управления количеством оксидов азота (NOx) в дымовых газах печи для сжигания топлива в энергоустановке, содержащая
прогнозирующий по модели контроллер,
пропорциональный интегрально-дифференциальный контроллер и/или адаптивный контроллер, подчиненные прогнозирующему по модели контроллеру и функционально связанные с ним,
систему для уменьшения NOx, содержащую расходный бак с восстановителем NOx и водяной расходный бак, гидравлически связанные с множеством сопел, которыми оснащена
печь для сжигания топлива, расположенная ниже по потоку от системы для уменьшения NOx, при этом система управления электрически связана с системой для уменьшения NOx,
при этом упомянутый расходный бак с восстановителем NOx и упомянутый водяной расходный бак связаны с соплами печи посредством каналов, оснащенных манометрами или устройствами измерения расхода, которые подают сигнал обратной связи в упомянутые пропорциональный интегрально-дифференциальный контроллер и/или адаптивный контроллер, при этом
упомянутые каналы также оснащены клапанами, активируемыми упомянутыми пропорциональным интегрально-дифференциальным контроллером и/или адаптивным контроллером, так что упомянутые манометр или устройство измерения расхода, пропорциональный интегрально-дифференциальный контроллер и/или адаптивный контроллер и клапан составляют цепь обратной связи.
2. Система управления по п. 1, отличающаяся тем, что прогнозирующий по модели контроллер управляет общими системными ограничениями, включающими выпуск NOx, проскок аммиака, уровень распределения температуры в зоне реакции, требования к нагрузке печи или их комбинацию.
3. Система управления по п. 1, отличающаяся тем, что она снабжена множеством пропорциональных интегрально-дифференциальных контроллеров, каждый из которых содержит цепь обратной связи, при этом пропорциональные интегрально-дифференциальные контроллеры управляют регулируемыми переменными, которые представляют собой распределение потока мочевины, общий несущий водный поток, высоту впрыскивания сопел, частоту или амплитуду пульсации воды, количество NOx, количество избыточного кислорода, стехиометрию зоны основной горелки, перепад давления в воздушном коробе или печи или их комбинацию.
4. Система управления по п. 1, отличающаяся тем, что прогнозирующий по модели контроллер использует отказоустойчивую логику.
5. Система управления по п. 1, отличающаяся тем, что адаптивный контроллер модифицирует поведение системы на основе динамических изменений процесса во время работы печи.
6. Система управления по п. 1, отличающаяся тем, что прогнозирующий по модели контроллер содержит блок оценки, который оценивает переменные состояния, представляющие собой уровень и распределение температуры в зоне реакции избирательного некаталитического восстановления (SNCR), распределения NO, NO2 и NH3 в зоне реакции SNCR, уровень и распределение O2 в зоне реакции SNCR, распределение потока в зоне реакции SNCR, продолжительность обработки и конфигурацию потока.
7. Система управления по п. 1, отличающаяся тем, что адаптивный контроллер использует алгоритм регулировки параметров для обновления параметров управления в соответствии с рабочими условиями.
8. Система управления по п. 1, отличающаяся тем, что адаптивный контроллер является адаптивным контроллером L1, который содержит модуль алгоритма управления, модуль адаптивного алгоритма и модуль прогнозирования состояний.
9. Система управления по п. 1, отличающаяся тем, что адаптивный контроллер содержит самонастраивающиеся адаптивные средства управления, нейроадаптивные средства управления, нейронную сеть, вейвлетную сеть или их комбинацию.
10. Система управления по п. 1, отличающаяся тем, что она снабжена диспетчером прогнозирующего по модели контроллера, который использует адаптивный механизм, обеспечивающий оценку эффективности прогнозирующего по модели контроллера на основе текущих измерений, при этом диспетчер прогнозирующего по модели контроллера активирует адаптивный механизм, как только обнаруживается, что разность между прогнозом по модели и результатом измерения превышает допустимое отклонение прогноза по модели.
11. Система управления по п. 1, отличающаяся тем, что она снабжена модулем оптимизации для воздействия на автоматическую настройку прогнозирующего по модели контроллера.
12. Система управления по п. 1, отличающаяся тем, что она выполнена с возможностью определения количества восстановителей NOx и воды, вводимых в печь соответственно из расходного бака с восстановителем NO и водяного расходного бака, при этом восстановитель NOx и вода доставляются в печь с перерывами.
13. Система управления по п. 12, отличающаяся тем, что восстановитель NOx и вода вводятся в печь через множество сопел, расположенных в боковой стене и в своде печи.
14. Система управления по п. 13, отличающаяся тем, что высота сопла изменяется в зависимости от управляющего сигнала, принятого из прогнозирующего по модели контроллера.
15. Система управления по п. 13, отличающаяся тем, что геометрическая форма поперечного сечения распыления восстановителя NOx представляет собой комбинацию треугольников и кругов, если смотреть сверху над соплами.
16. Система управления для управления количеством оксидов азота (NOx) в дымовых газах печи для сжигания топлива в энергоустановке, содержащая
пропорциональный интегрально-дифференциальный контроллер и/или адаптивный контроллер;
систему для уменьшения NOx, содержащую расходный бак с восстановителем NOx и водяной расходный бак, гидравлически связанные с множеством сопел, которыми оснащена
печь для сжигания топлива, расположенная ниже по потоку от системы для уменьшения NOx, при этом система управления электрически связана с системой для уменьшения NOx,
при этом упомянутый расходный бак с восстановителем NOx и упомянутый водяной расходный бак связаны с соплами печи посредством каналов, оснащенных манометрами или устройствами измерения расхода, которые подают сигнал обратной связи в упомянутые пропорциональный интегрально-дифференциальный контроллер и/или адаптивный контроллер, при этом
упомянутые каналы оснащены клапанами, активируемыми упомянутыми пропорциональным интегрально-дифференциальным контроллером и/или адаптивным контроллером, так что упомянутые манометр или устройство измерения расхода, пропорциональный интегрально-дифференциальный контроллер и/или адаптивный контроллер и клапан составляют цепь обратной связи.
17. Система управления по п. 16, отличающаяся тем, что она снабжена множеством пропорциональных интегрально-дифференциальных контроллеров, каждый из которых содержит цепь обратной связи; при этом пропорциональные интегрально-дифференциальные контроллеры управляют регулируемыми переменными, которые представляют собой распределение потока мочевины, общий несущий водный поток, высоту впрыскивания сопел, частоту или амплитуду пульсации воды, количество NOx, количество избыточного кислорода, стехиометрию зоны основной горелки, перепад давления в воздушном коробе или печи или их комбинацию.
18. Система управления по п. 16, отличающаяся тем, что адаптивный контроллер модифицирует поведение системы на основе динамических изменений процесса во время работы печи.
19. Система управления по п. 16, отличающаяся тем, что адаптивный контроллер использует алгоритм регулировки параметров для обновления параметров управления в соответствии с рабочими условиями.
20. Система управления по п. 16, отличающаяся тем, что адаптивный контроллер является адаптивным контроллером L1, который содержит модуль алгоритма управления, модуль адаптивного алгоритма и модуль прогнозирования состояний.
21. Система управления по п. 16, отличающаяся тем, что адаптивный контроллер содержит самонастраивающиеся адаптивные средства управления, нейроадаптивные средства управления, нейронную сеть, вейвлетную сеть или их комбинацию.
22. Система управления по п. 16, отличающаяся тем, что она выполнена с возможностью определения количества восстановителей NOx и воды, вводимых в печь соответственно из расходного бака с восстановителем NO и водяного расходного бака, при этом восстановитель NOx и вода доставляются в печь с перерывами.
23. Система управления по п. 22, отличающаяся тем, что восстановитель NOx и вода вводятся в печь через множество сопел, расположенных в боковой стене и в своде печи.
24. Система управления по п. 23, отличающаяся тем, что высота сопла изменяется в зависимости от управляющего сигнала, принятого из прогнозирующего по модели контроллера.
25. Способ управления количеством оксидов азота (NOx) в дымовых газах печи для сжигания топлива в энергоустановке, включающий:
предоставление из печи в прогнозирующий по модели контроллер информации, включающей по меньшей мере одно из следующего: выпуск NOx, проскок аммиака, уровень распределения температуры в зоне реакции, требования к нагрузке печи или их комбинацию; и
предоставление из прогнозирующего по модели контроллера в пропорциональный интегрально-дифференциальный контроллер и/или адаптивный контроллер управляющего сигнала, включающего по меньшей мере одно из следующего: отклонение распределения потока мочевины, отклонение общего несущего водного потока, высоту впрыскивания сопел, частоту или амплитуду пульсации воды, отклонение от установленного значения NOx, отклонение от установленного значения избыточного кислорода, отклонение от установленного значения стехиометрии зоны основной горелки, отклонение от установленного значения перепада давления в воздушном коробе или печи или их комбинацию, при этом управляющий сигнал используют для управления вводом в печь восстановителя NOx.
| US 6403046 B1, 11.06.2002 | |||
| WO 03105997 A1, 24.12.2003 | |||
| US 5853683 A, 29.12.1998 | |||
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| ПРОТЯЖНАЯ ПЕЧЬ ДЛЯ НАНЕСЕНИЯ ЛЕГКОПЛАВКИХ ПОКРЫТИЙ НА ИЗДЕЛИЯ И СПОСОБ ЕЕ ОТОПЛЕНИЯ | 1988 |
|
SU1570443A3 |

