Изобретение относится к области систем для наведения лазерного луча на цель, снабженных устройствами активной визуализации, позволяющими определить местонахождение целей в данной среде, целей, потенциально являющихся воздушными или наземными, и к управлению лазерными системами наведения с использованием обратной связи.
Обычно, при активной визуализации используется свой собственный источник подсветки, традиционно импульсный лазер. Вследствие направленности излучения и используемых энергий, сигнал принимается при большом расстоянии, даже и в случае рассеивающей среды. Эти характеристики, в частности, сделали данную технологию весьма важной для проблем безопасности и обороны. Фотоны, испускаемые лазером и отражаемые различными объектами в театре военных действий, собираются фотоприемником. Совместное использование импульсного лазера и временного интервала при приеме позволяет выбрать участок пространства, содержащего представляющие интерес цели.
Важная область, в частности, это наведение систем с направленной лазерной энергией, требующее коррекции эффектов вследствие атмосферной турбулентности при свободном распространении лазерных пучков; эта турбулентность создает помехи системе и негативно влияет на ее работу в отношении точности и стабильности наведения. Кроме того, слежение за движущейся целью и одновременная коррекция оптических помех, привносимых атмосферой, требует значительной полосы пропускания при управлении (порядка 1-2 кГц) для коррекции помех с характерной длительностью приблизительно 10 мс, и требует покрытия максимально возможной пространственной области (порядка полупространства), при соблюдении операционных ограничений, таких как надежность, автономность, подвижность, время развертывания, и т.д. Для применений, требующих очень высоких уровней рабочих параметров (точность порядка микрорадиан, диапазон нескольких километров), эта коррекция приводит к необходимости измерения положения цели с высоким угловым разрешением и достаточной частотой, для гарантии первого уровня компенсации деформации волновой поверхности (явление фазового дрожания (джиттер)). Кроме того, система подсветки должна работать на длине волны, близкой, но отличающейся от длины волны лазерной системы наведения.
Могут быть процитированы другие примеры применений, например, выполнение оптической связи в свободном пространстве между неподвижной наземной станцией и летящим объектом в воздухе или в пространстве, или, например, для способа сварки на больших расстояниях, что часто бывает на судоверфях при сборке больших частей и когда текущие решения проблемы предполагают использование сварочных станций в контакте с частями, или в непосредственной близости к собираемым частям.
В настоящее время существует решение, используемое в телескопах, проблемы коррекции эффектов, обусловленных этими атмосферными помехами. Однако, астрономические приборы имеют другие операционные характеристики. В частности, объект наведения обычно подобен точке и неподвижен (или перемещается очень медленно), что отличается от случая целей, предполагаемых для лазерных систем наведения. Кроме того, требуется и дневное, и ночное их функционирование.
Следовательно, имеется потребность в системе для наведения лазерного луча на цель, которая одновременно удовлетворяет вышеупомянутому набору требований, в отношении точности, диапазона, и стабильности наведения, доступной области обзора, оптовой и системной стоимости.
Предлагаемое решение основано на опто-механической архитектуре, в которой наведение разделяется на две стадии, одна из которых обозначается грубой стадией, и другая обозначается точной стадией, и первая обеспечивает угловое покрытие, а вторая обеспечивает окончательную точность. Кроме того, стадия грубого наведения позволяет использовать активное отображение, которое позволяет задействовать точное наведение.
Более определенно, предмет изобретения - оптическая система для наведения лазерного луча на цель через атмосферу. Прежде всего, она отличается тем, что включает в себя четыре оптических канала:
- канал пассивной визуализации со вспомогательной камерой, пригодной для получения изображений цели, и управляющее устройство грубого наведения, связанное с этой камерой;
- канал подсветки с импульсным источником подсветки и средством временной синхронизации,
и тем, что канал пассивной визуализации и канал подсветки включают в себя первое общее оптическое устройство грубого наведения;
- канал исполнительного элемента с лазерным источником большой мощности;
- канал активной визуализации с:
высокоскоростной камерой, синхронизированной с импульсным источником подсветки средством временной синхронизации;
средство для согласования высокоскоростной камеры с лазерным источником большой мощности; и
устройство управления точным наведением, связанное с этой камерой,
и тем, что канал активной визуализации и канал исполнительного элемента формируют пару и включают в себя
- второе общее оптическое устройство грубого наведения, первое и второе оптические устройства грубого наведения, управляемые управляющим устройством грубого наведения или управляющим устройством точного наведения в зависимости от операционной фазы в последовательности пусковых операций;
- общее оптическое устройство точного наведения, управляемое устройством управления точным наведением;
- сводящее оптическое устройство, снабженное средством наведения,
и тем, что управляющее устройство грубого наведения связано с управляющим устройством точного наведения.
Сводящее оптическое устройство предпочтительно расположено между общим оптическим устройством точного наведения и вторым оптическим устройством грубого наведения.
В соответствии с одним признаком изобретения, оптическая система наведения содержит первое устройство для наложения канала пассивной визуализации и канала подсветки, которые расположены между первым оптическим устройством грубого наведения и лазерным источником подсветки и вторым устройством для наложения канала активной визуализации и канала большой мощности, которые расположены между устройством точного наведения и лазерным источником большой мощности.
Оптическая система наведения опционально содержит другие пары каналов активной визуализации и каналов исполнительного элемента, которые размещены параллельно; управляющее устройство точного наведения каждого канала активной визуализации связано с устройством управления грубого наведения пассивного канала визуализации.
В соответствии с другим признаком изобретения, пара каналов - канал активной визуализации и канал исполнительного элемента, установлены на структуре в заданной, предпочтительно прямолинейной, конфигурации, и сама структура установлена на устройстве для поворота структуры.
Архитектура системы в соответствии с изобретением позволяет использовать любые лазеры большой мощности для получения желаемого эффекта.
Она также позволяет использовать элементы небольшого размера, которые проще стандартизировать и, следовательно, получить, тем самым, снижение стоимости реализации, предоставив систему с высокой степенью модульности, следовательно, с облегченной интеграцией и обслуживанием.
Другой предмет изобретения - это способ для отслеживания цели через атмосферу посредством системы наведения, такой как описана выше, отличающийся тем, что он включает в себя следующие этапы:
- ориентации первого и каждого второго устройства грубого наведения в заданном направлении;
- когда цель присутствует в поле обзора вспомогательной камеры, синхронизации и стабилизации контура грубого слежения;
- как только цель обнаружена и отслеживается, управление первым устройством грубого наведения и каждым вторым устройством грубого наведения допускается устройством управления грубого наведения;
- активизации лазерного источника подсветки;
- как только подсветка активизирована, каждая высокоскоростная камера поставляет видео поток на связанное устройство управления точного наведения для синхронизации и стабилизации каждого контура точного слежения;
- каждое второе устройство грубого наведения тогда управляется управляющим устройством точного наведения его пары, которое впоследствии управляет и устройством грубого наведения и устройством точного наведения;
- как только каждое второе устройство грубого наведения согласовано с управляющим устройством точного наведения данной пары, управляющее устройство грубого наведения впоследствии управляет только первым устройством грубого наведения;
- при управлении пуском системы, активизации лазеров большой мощности и отслеживания цели на основании активного отображения, предоставляемого высокоскоростными камерами и устройствами точного и грубого наведения, так, чтобы каждый лазерный источник большой мощности был наведен.
Другие признаки и преимущества изобретения станут очевидными при чтении нижеследующего подробного описания, приводимого посредством не ограничивающего примера и в связи с сопровождающими чертежами, на которых:
Фиг.1 схематично изображает пример системы наведения в соответствии с изобретением, снабженной множественными парами каналов активной визуализации и каналов исполнительного элемента;
Фиг.2 представляет блок-схему последовательности операций, показывающая этапы способа функционирования системы в соответствии с изобретением;
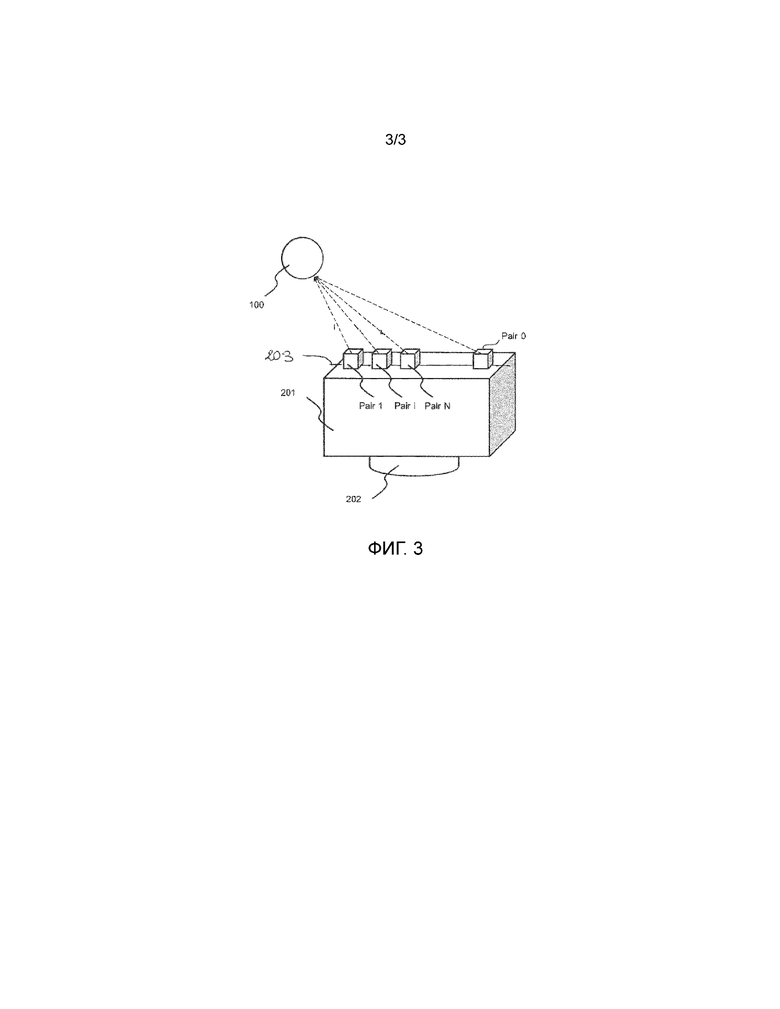
Фиг.3 схематически представляет пример системы наведения в соответствии с изобретением, установленной на поворотной сборке.
На чертежах одни и те же элементы имеют те же самые обозначения.
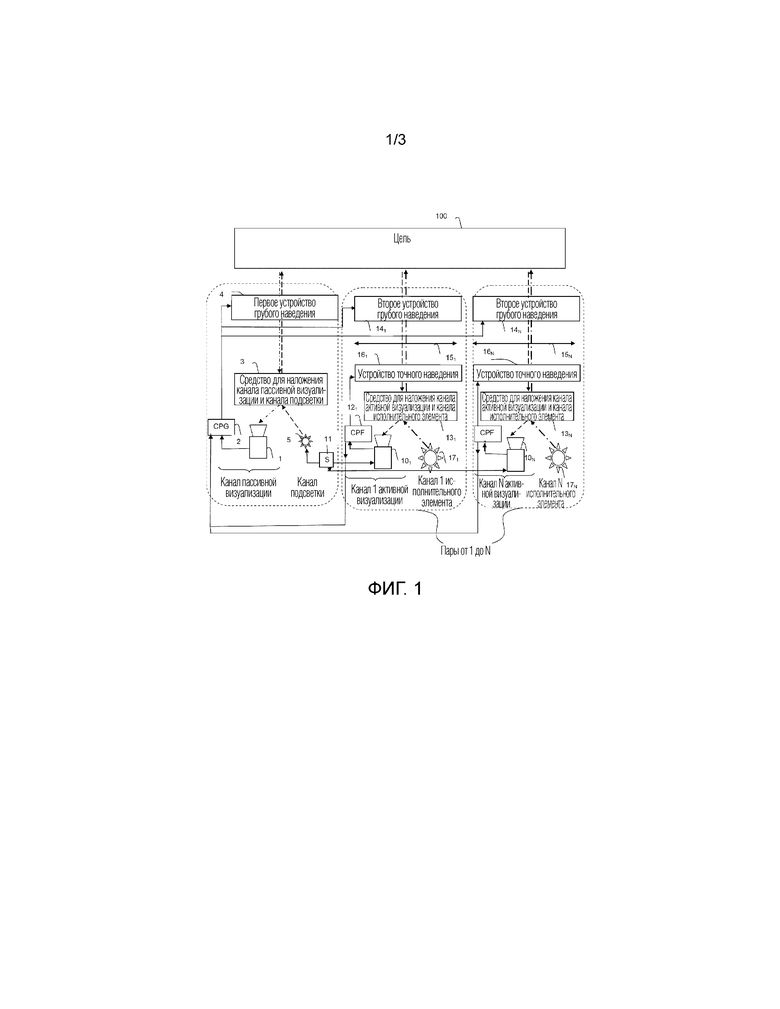
Со ссылкой на Фиг.1, описывается пример оптической системы для лазерного наведения на цель 100 через атмосферу в соответствии с изобретением. Система включает в себя четыре канала:
- канал пассивной визуализации со вспомогательной камерой 1 широкого поля обзора (например, приблизительно 3°), предназначенной для получения изображений цели 100, и управляющее устройство 2 грубого наведения, связанное с этой камерой, причем устройство снабжено измерителем отклонения;
- канал подсветки с высокоскоростным импульсным источником 5 подсветки, действующим в ближнем инфракрасном диапазоне (SWIR: 0,8 мкм-3 мкм), например, на длине волны, гарантирующей безопасность глаз (1,5 мкм), и имеющей поле обзора, меньшее, поля обзора камеры широкого поля обзора (несколько миллирадиан, например), и средство 11 временной синхронизации для синхронизации высокоскоростной камеры 101 (канала активной визуализации, описанный ниже) с источником 5 подсветки.
Эти каналы пассивной визуализации и подсветки включают в себя первое общее оптическое устройство 4 грубого наведения, причем это устройство управляется с использованием обратной связи в соответствии с заданными значениями, создаваемыми измерителем отклонения на основе изображений, возникающих от вспомогательной камеры 1.
Два других канала:
- канал исполнительного элемента с лазерным источником 171 большой мощности, также обозначаемый как канал большой мощности;
- канал активной визуализации с:
камерой 101, синхронизированной с источником 5 подсветки и имеющей поле обзора, которое равно таковому для источника подсветки; в частности, подсветка, которая намного шире, чем поле обзора, неэффективно, тогда как подсветка, которая намного уже, чем поле обзора, не обеспечивает достаточной однородности;
средство (не показано) для согласования высокоскоростной камеры с лазерным источником; и
устройство 121 управления точным наведением, связанное с этой камерой 101 и снабженное измерителем отклонения; управляющее устройство 2 грубого наведения связано с управляющим устройством 121 точного наведения.
Эти два канала - канал активной визуализации и канал исполнительного элемента, формируют пару и включают в себя:
второе общее оптическое устройство 141 грубого наведения, причем устройство также управляется с использованием обратной связи в соответствии с заданными значениями, создаваемыми измерителем отклонения на основе изображений, возникающих из вспомогательной камеры 1 затем в соответствии с таковым из высокоскоростной камеры 101, как будет видно ниже; первое и второе оптические устройства 4 и 141 грубого наведения идентичны и управляются устройством 2 управления грубого наведения;
общее устройство 121 точного наведения, причем устройство управляется с использованием обратной связи в соответствии с заданными значениями, создаваемыми измерителем отклонения на основе изображений, возникающих из высокоскоростной камеры 101, причем устройство расположено между вторым устройством 141 грубого наведения и лазерным источником большой мощности, и управляется управляющим устройством 121 точного наведения;
сводящее оптическое устройство 151, снабженное средством наведения.
Для коррекции атмосферных помех, полоса частот которых равна частоте Тайлора атмосферы, а именно, порядка 100 Гц, параметры цели в отношении точности точного наведения составляют порядок микрорадиан, что относительно полосы отслеживания составляет порядок килогерца. Следующие элементы обычно могут быть использованы для получения рабочих параметров такого уровня.
Высокоскоростная камера 101 работает в ближнем инфракрасном диапазоне (SWIR) при скорости передачи кадров, более, чем один килогерц, например 2 кГц; его разрешающая способность составляет, по меньшей мере, 256×256 пикселей. Управляющее устройство 121 точного наведения и устройство 161 точного наведения работают при скоростях, соответствующих таковой для высокоскоростной камеры.
Источник 5 подсветки поставляет последовательность импульсов, с плотностью потока обычно более чем 10 мДж, и работает на длине волны 1,5 мкм из-за необходимости обеспечения безопасности глаза. Он охватывает поле обзора, равное таковому для высокоскоростной камеры 101, а именно, несколько мрад, например, 5 мрад. Для оптимизации отношения сигнал-шум высокоскоростной камеры, этот лазерный пучок пульсирует со скоростью повторения, которая синхронизирована со скоростью передачи кадров высокоскоростной камеры, посредством использования, например, блока 11 тактовой синхронизации. Этот лазерный пучок обычно пульсирует со скоростью повторения, которая является целым кратным числом скорости передачи кадров высокоскоростной камеры (CHC).
Например, источник 5 подсветки может включать в себя лазер подсветки, поставляющий энергию порядка 250 миллиджоулей в импульсах, длительность которых имеет порядок 500 наносекунд, и связанный с высокоскоростной камерой, имеющей открытое временное окно порядка длительности импульса источника подсветки со спектральной шириной фильтра приблизительно 10 нанометров. Эта архитектура источника подсветки+высокоскоростная камера представляет собой структуру, подходящую для удовлетворения требуемых критериев по диапазону и размерам обрабатываемых объектов.
Такой источник подсветки 5 описан в патенте EP 2 283 548. Он излучает в спектральной области около 1,5 мкм в спектральном окне длин волн Δλ=±2 нм и поставляет энергию в импульсах 250 мДж при частоте 2 кГц. Этот источник также связан с оптическим устройством (увеличения), который подстраивает подсвечиваемое поле обзора для цели и для расстояния подсветки, и поле обзора потенциально изменяется от 1,5 мрад до 5 мрад.
Вспомогательная камера 1 работает, например, в диапазоне IR2 (3 мкм-5 мкм).
Лазер 171 большой мощности работает при мощности, которая может составлять приблизительно от одного киловатта и до многих десятков киловатт в ближнем инфракрасном диапазоне (1,07 мкм, например).
Камеры 1, 101, источник 5 подсветки и источник 171 большой мощности предпочтительно устанавливаются неподвижными.
Устройства 4 и 141 грубого наведения имеют, по меньшей мере, две степени свободы; обычно это оптические блоки с зеркалами, которые могут быть ориентированы, с одним-четырьмя плоскими зеркалами, два зеркала для перископа или четыре зеркала для оптического шарнира.
Устройство 161 точного наведения имеет, по меньшей мере, две степени свободы; обычно это одно или более зеркал, помещенных на монтажные опоры, снабженных пьезоэлектрическими приводами, или стеклянная пластина, помещенная на монтажные опоры, снабженные гальванометрическими приводами.
Эти устройства 4 и 141 грубого наведения могут быть обращены к полусферическому полю обзора, а именно, к полю обзора 360° в отношении азимута и от -10° до +90° в отношении угла места, с ограничением или без ограничения на число поворотов. Таким образом, независимо от траектории объекта выше горизонта, этот объект может быть отслежен системой наведения в соответствии с изобретением.
Сводящее оптическое устройство 151 снабжено средством наведения, которое объединяется со вторым устройством 141 грубого наведения и устройством 161 точного наведения для формирования изображения цели 100 на высокоскоростной камере 101 и для наведения лазера 171 большой мощности на цель 100. Это средство представляет собой, например, параболическое зеркало, установленное на тройку линейных приводов или последовательности линз, установленные на кулачковом барабане.
Для того, чтобы первое оптическое устройство 4 грубого наведения было общим для пассивной визуализации и каналов подсветки, первое устройство 3 для наложения этих двух каналов (общее для этих двух каналов) добавляется между первым устройством грубого наведения и лазерным источником подсветки.
Аналогично, для того, чтобы второе оптическое устройство 141 грубого наведения, устройство 161 точного наведения и сводящее устройство 151 были общими для активной визуализации и каналов исполнительного элемента, второе устройство 131 для наложения этих двух каналов (общее для этих двух каналов) добавляется между устройством точного наведения и лазерным источником большой мощности. Оно преимущественно располагается насколько возможно близко к высокоскоростной камере 101 и к источнику 171 большой мощности.
Этими средствами наложения обычно являются:
- дихроичная пластина; или
- дифракционная решетка, используемая в режиме отражения; или
- голографическое зеркало, такое как используется в коллиматорном дисплее; или
- перфорированное зеркало, такое как описано в патентах WO2009077361A1 и WO2009077360A1. Последнее устройство позволяет достигнуть разделения лазера большой мощности и высокоскоростных активных отображающих каналов независимо от длин волны.
Для обеспечения полной требуемой мощности системы, при поддержании стоимости, надежности, и для обеспечения ремонтопригодности, преимущественно используются множественные лазерные источники большой мощности. Пары каналов активной визуализации и каналов исполнительного элемента тогда увеличиваются, сохраняя только единственный канал пассивной визуализации и единственный канал подсветки, как показано на Фиг.1, на котором также показаны от 1 до N пар активной визуализации и каналов исполнительного элемента, где N≥2.
Все каналы активной визуализации и каналы исполнительного элемента включают в себя те же самые функциональные элементы, но эти элементы могут быть произведены по-разному (например, в отношении мощности, поля обзора, технологии устройства наведения, и т.д.). Все высокоскоростные камеры от 101 до 10N активных отображающих каналов синхронизированы с единственным источником 5 подсветки из канала подсветки.
Каждый пучок 171 (до 17N) лазера большой мощности наводится на цель 100 посредством его собственного грубого наведения 141 (до 14N), точного наведения 161 (до 16N) и сводящих устройств 151 (до 15N).
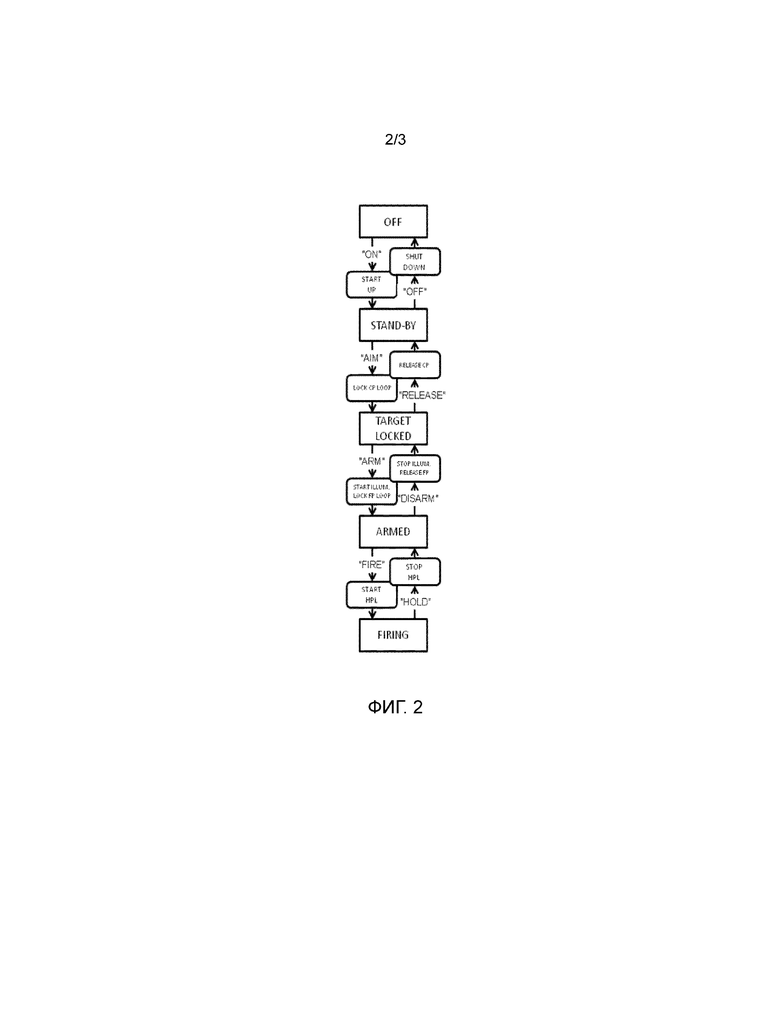
Типичная операционная последовательность описывается ниже в отношении блок-схемы последовательности операций на Фиг.2, при этом в качестве примера системы наведения взята система с множественными парами каналов активной визуализации и каналов исполнительного элемента. На этом чертеже состояния системы показаны в остроугольных прямоугольниках, этапы способа - в скругленных прямоугольниках, и команды показаны между кавычками "...".
В начальном OFF состоянии, оптическая лазерная система наведения не включена, и не снабжается питанием, все подвижные элементы, например, устройства наведения, находятся в конфигурации хранения, и все устройства управления отключены.
Этап START-UP заключается в подаче питания на систему, инициализации некоторых тестирований запуска, помещения подвижных элементов в конфигурацию "резервирования", и инициализации устройств управления. Это задается командой "ON" (включения)системы.
В состоянии STAND-BY, система находится в режиме резервирования. Из этого состояния, оператор может выполнить автоматизированную диагностику, обратиться к режиму конфигурации системы, или иначе продолжить операционную последовательность.
Состояние LOCK CP (грубое наведение) LOOP заключается в ориентации устройств 4, 141 до 14N грубого наведения в заданном направлении, либо на основании внешнего указания объекта (DO радар), либо иначе выполняя процедуру поиска, в частности, посредством измерителя отклонения устройства 2 грубого управления, либо иначе ручным наведением оператором. Вслед за этим предварительным наведением:
- если цель присутствует в поле обзора вспомогательной камеры 1 и распознана, контур грубого слежения (CP LOOP) синхронизируется устройством 2 управления грубого наведения и стабилизируется; переходы системы в состояние TARGET LOOKED;
- если цель не может быть захвачена, система возвращается к резервированию после задержки, задаваемой в параметрах настройки.
Этот этап задается командой "AIM", или иначе полной потерей синхронизации из более позднего состояния.
В состоянии TARGET LOOKED, цель 100 обнаружена, и система успешно ее захватила. Все устройства 4, 141 (до 14N) грубого и 161 (до 16N) точного наведения управляются с использованием обратной связи в соответствии с изображениями, возникающими из вспомогательной камеры 1: все вторые устройства 141 (до 14N) грубого наведения одновременно наводятся на цель 100 устройством 2 управления грубого наведения.
Этап START ILLUM/LOCK FP (точное наведение) LOOP заключается в активизации лазерного источника 5 подсветки и в синхронизации каждого контура точного наведения. Как только подсветка активизирована, устройство 161 (до 16N) точного наведения каждой пары каналов высокой мощности и каналов активной визуализации ориентируется в его доступном поле обзора, пока цель 100 присутствует в поле обзора высокоскоростной камеры 101 (до 10N) и распознается; контур точного слежения тогда связывается с управляющим устройством 121 (до 12N) точного наведения посредством его измерителя отклонения и высокоскоростной камеры 101 (до 10N), которая синхронизирована с источником 5 подсветки.
В каждом канале большой мощности, управление вторым устройством 141 (до 14N) грубого наведения затем допускается управляющим устройством 121 (до 12N) точного наведения, которое становится ведущим для устройства 2 управления грубого наведения. Последнее затем только создает команду для устройств грубого наведения на основе заданных значений, предоставляемых управлением точного наведения, которое управляет и грубым наведением и точным наведением их соответствующих каналов.
Этот этап задается командой "ARM" системы или потерей точного отслеживания.
В состоянии ARMED цель отслеживается на основании активной визуализации. Как отмечено для предыдущего этапа, каждый канал большой мощности автономен относительно управления его устройством 141 (до 14N) грубого наведения и его устройством 161 (до 16N) точного наведения. Канал пассивной визуализации и, следовательно, первое устройство 4 грубого наведения остается под управлением устройства 2 управления грубого наведения для наведения подсветки 5. Таким образом, в этом состоянии, управляющее устройство 2 грубого наведения принимает заданные значения наведения для каждого второго устройства грубого наведения от соответствующих устройств управления точного наведения и создает соответственные команды для соответствующих устройств грубого наведения; оно также продолжает принимать видео поток, возникающий от пассивной вспомогательной (с широким полем обзора) камеры, и создает команду для первого устройства грубого наведения посредством его измерителя отклонения. Управляющее устройство грубого наведения, поэтому, все еще остается ведущим относительно первого устройства грубого наведения канала пассивной визуализации и канала подсветки, и ведомым относительно вторых устройств грубого наведения всех других каналов.
Именно к этому состоянию система возвращается в случае нарушения безопасности во время операции пуска.
Этап START HPL (лазер большой мощности) заключается в активизации каждого мощного лазерного источника 171 (до 17N). Это задается командой "FIRE" системы.
В состоянии FIRING, каждый лазерный источник большой мощности активизируется и наводится на цель 100 посредством высокоскоростной камеры 101 (до 10N), устройств 161 (до 16N) точного и грубого 141 (до 14N) наведения и сводящего устройства 151 (до 15N) его канала.
Этап STOP HPL заключается в отключении каждого лазерного источника 171 (до 17N) большой мощности. Это задается командой "HOLD" системы, блокировкой времени таймера безопасности, или потерей вспомогательного канала, что одновременно отключает все источники питания, или прерыванием в системе безопасности, или прерыванием точного отслеживания, что может отключить только данный канал большой мощности и подать сигнал тревоги.
Система возвращается в состояние ARMED как описано выше, в котором источник подсветки активизирован, и управление наведением каждой пары от 1 до N выполняется их соответствующим управляющим устройством 121 (до 12N) точного наведения, и управление наведением пары 0 выполняется устройством 2 управления грубого наведения.
В случае нарушения безопасности во время операции пуска, система возвращается к этому состоянию ARMED.
Этап STOP ILLUM./RELEASE заключается, в этом порядке, в передаче управления устройствами 4, 141 (до 14N) грубого наведения к управлению 2 грубого наведения, разъединению контуров точного наведения и отключению подсветки.
Это выполняется командой "DISARM" системы, и она тогда возвращается в состояние TARGET LOOKED, описанное выше.
Этап RELEASE CP LOOP заключается в выполнении грубого отслеживания для возврата к состоянию STAND-BY. Устройства 4, 141 (до 14N) грубого наведения помещаются в конфигурацию резервирования.
Это задается командой "RELEASE".
Этап SHUT DOWN заключается в отключении электропитания системы, инициализации некоторых тестов отключения и помещения подвижных элементов в сложенную конфигурацию.
Это задается командой "OFF" системы.
Для гарантии того, что пучки (в частности, пучки большой мощности) объединялись на цели, контроль управляет геометрией системы относительно ее цели для предоставления, на каждый канал, элементов коррекции, так, чтобы каждый канал наводился на ту же самую точку на цели, или наоборот, чтобы различные пары каналов активной визуализации и каналов большой мощности наводились на различные точки (различные эффекты) на той же самой цели.
Для уменьшения эффекта потенциального экранирования между различными устройствами наведения, который становится более существенным с увеличением числа N пар каналов, набор каналов включается в одну и ту же структуру 201, показанную на Фиг.3: это типичный стандартный контейнер, который был опционально изменен. Он может быть установлен как вращающийся вокруг вертикальной оси посредством устройства 202 для вращения структуры вокруг одной или нескольких его осей, позволяя, например, перемещение от -90° до +90° относительно нейтральной оси системы. Это ротационное устройство 202 может быть поворотным столом или шарнирным соединением, снабженными приводами для поворота структуры. Кроме того, эта сборка каналов помещается в конфигурацию, минимизирующую риски экранирования, предполагая движение цели 100 относительно системы: устройства наведения преимущественно устанавливаются вдоль продольной медианной линии 203 верхней стенки контейнера. Поворотный стол 202 и схема установки устройств наведения позволяет системе работать в любом направлении в доступном полушарии. Следовательно, оператор может конфигурировать систему в таком положении, чтобы экранировки можно было избежать в необходимом направлении (направление цели).
Хотя изобретение было описано вместе с конкретными вариантами реализации, совершенно очевидно, что оно никоим образом не ограничивается ими, и что оно содержит все технические эквиваленты описанных средств, а также и их комбинаций, если последние находятся в пределах объема притязаний изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛАЗЕРНАЯ СИСТЕМА ДЛЯ ПОЛУЧЕНИЯ ВЫСОКИХ, СООТВЕТСТВЕННО КОМПАКТНЫХ, ПЛОТНОСТЕЙ МОЩНОСТИ НА ОБЪЕКТЕ | 2011 |
|
RU2549742C2 |
| ПАНОРАМНЫЙ ПРИБОР НАБЛЮДЕНИЯ КОМАНДИРА | 2018 |
|
RU2682141C1 |
| БОРТОВОЙ ТЕРМИНАЛ ЛАЗЕРНОЙ СВЯЗИ | 2025 |
|
RU2841366C1 |
| Способ обзорной пассивной однопозиционной моноимпульсной трёхкоординатной угломерно-разностно-доплеровской локации перемещающихся в пространстве радиоизлучающих объектов | 2017 |
|
RU2661357C1 |
| Бистатический лазерный монитор | 2021 |
|
RU2755256C1 |
| СИСТЕМА ПРИЦЕЛИВАНИЯ ОРУЖИЯ | 2021 |
|
RU2784528C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ ОПТИКО-ЛОКАЦИОННАЯ СИСТЕМА | 2008 |
|
RU2372628C1 |
| СПОСОБ ФОРМИРОВАНИЯ СФЕРОПАНОРАМНОГО ПОЛЯ ЗРЕНИЯ ПРИБОРОВ НАБЛЮДЕНИЯ И ПРИЦЕЛИВАНИЯ | 2020 |
|
RU2740472C2 |
| ПОДВИЖНАЯ БОЕВАЯ МАШИНА С КОМПЛЕКСОМ ПРОТИВОДЕЙСТВИЯ УПРАВЛЯЕМОМУ, САМОНАВОДЯЩЕМУСЯ ОРУЖИЮ И АРТИЛЛЕРИЙСКОМУ ОРУЖИЮ С ЛАЗЕРНЫМИ ДАЛЬНОМЕРАМИ | 1998 |
|
RU2151360C1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2388010C1 |
Изобретение относится к области систем для наведения лазерного луча на цель. Заявленная оптическая система для наведения лазерного луча на цель через атмосферу включает в себя четыре оптических канала: канал пассивной визуализации со вспомогательной камерой (1), связанной с устройством (2) управления грубым наведением; канал подсветки с импульсным источником (5) подсветки и средством (11) временной синхронизации, эти каналы включают в себя первое общее оптическое устройство (4) грубого наведения; канал исполнительного элемента с лазерным источником большой мощности (171); канал активной визуализации с высокоскоростной камерой (101), синхронизированной с источником (5) подсветки средством (11) синхронизации и связанной с устройством (121) управления точным наведением; средство для согласования высокоскоростной камеры (101) с лазерным источником большой мощности (171). Причем канал активной визуализации и канал исполнительного элемента формируют пару и включают в себя: второе общее оптическое устройство (141) грубого наведения, устройства грубого наведения, управляемые управляющим устройством (2) грубого наведения; общее оптическое устройство (161) точного наведения, управляемое устройством (121) управления точным наведением; и управляющее устройство (2) грубого наведения связано с управляющим устройством (121) точного наведения. Технический результат – повышение точности диапазона, стабильности наведения и доступной области обзора. 2 н. и 7 з.п. ф-лы, 3 ил.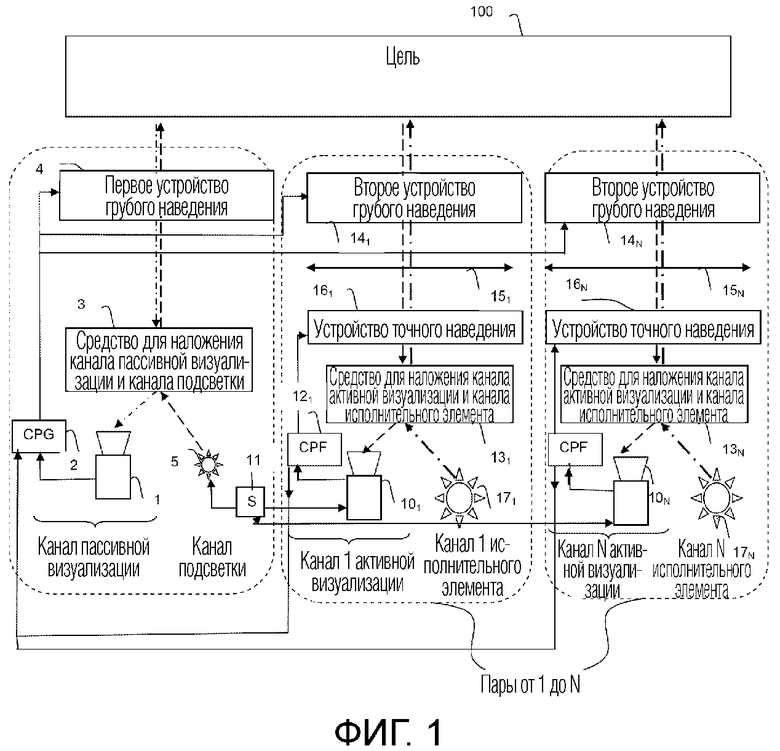
1. Оптическая система для наведения лазерного луча на цель (100) через атмосферу, отличающаяся тем, что она включает в себя четыре оптических канала:
- канал пассивной визуализации со вспомогательной камерой (1), выполненной с возможностью получения изображений цели, и управляющее устройство (2) грубого наведения, связанное с этой камерой;
- канал подсветки с импульсным источником (5) подсветки и средством (11) временной синхронизации;
канал пассивной визуализации и канал подсветки, включающие в себя первое общее оптическое устройство (4) грубого наведения, связанное с управляющим устройством (2) грубого наведения;
- канал исполнительного элемента с лазерным источником большой мощности (171);
- канал активной визуализации с:
высокоскоростной камерой (101), синхронизированной с источником (5) подсветки средством (11) временной синхронизации;
средство для согласования высокоскоростной камеры (101) с лазерным источником большой мощности (171); и
устройство (121) управления точным наведением, связанное с этой высокоскоростной камерой,
и тем, что и канал исполнительного элемента, и канал активной визуализации формируют пару (пара 1) и включают в себя
- второе общее оптическое устройство (141) грубого наведения, первые общие оптические устройства (4) грубого наведения, связанные с управляющим устройством (2) грубого наведения;
- общее оптическое устройство (161) точного наведения, управляемое устройством (121) управления точным наведением;
- сводящее оптическое устройство (151), снабженное средством наведения,
и тем, что управляющее устройство (2) грубого наведения связано с управляющим устройством (121) точного наведения.
2. Оптическая система для отслеживания цели по п.1, отличающаяся тем, что сводящее оптическое устройство (151) расположено между общим оптическим устройством (161) точного наведения и вторым оптическим устройством грубого наведения (141).
3. Оптическая система для отслеживания цели по одному из предыдущих пунктов, отличающаяся тем, что она содержит первое устройство (3) для наложения канала пассивной визуализации и канала подсветки, которые расположены между первым оптическим устройством (4) грубого наведения и лазерным источником (5) подсветки.
4. Оптическая система для отслеживания цели по одному из предыдущих пунктов, отличающаяся тем, что она содержит второе устройство (131) для наложения канала активной визуализации и канала большой мощности, которые расположены между устройством (161) точного наведения и лазерным источником (171) большой мощности.
5. Оптическая система для отслеживания цели по одному из предыдущих пунктов, отличающаяся тем, что она содержит другие пары каналов активной визуализации и каналов исполнительного элемента (пары от 1 до N), которые размещены параллельно, и тем, что управляющее устройство (2) грубого наведения связано с управляющим устройством (121, …, 12N) точного наведения каждого канала активной визуализации.
6. Оптическая система для отслеживания цели по предыдущему пункту, отличающаяся тем, что пары каналов - активной визуализации и исполнительного элемента, установлены на структуре (201) в заданной конфигурации, и тем, что структура сама по себе установлена на устройстве (202) для вращения структуры.
7. Оптическая система для отслеживания цели по предыдущему пункту, отличающаяся тем, что конфигурация является прямолинейной.
8. Способ для отслеживания цели (100) через атмосферу посредством системы наведения по одному из предыдущих пунктов, отличающийся тем, что он включает в себя следующие этапы:
- ориентации первого и каждого второго устройства грубого наведения в заданном направлении;
- когда цель присутствует в поле обзора вспомогательной камеры, синхронизации и стабилизации контура грубого слежения;
- как только цель обнаружена и отслеживается, управление первым устройством грубого наведения и каждым вторым устройством грубого наведения допускается устройством управления грубого наведения;
- активизации лазерного источника подсветки;
- как только подсветка активизирована, каждая высокоскоростная камера поставляет видео поток на связанное устройство управления точного наведения, позволяя синхронизировать и стабилизировать каждый контур точного слежения;
- каждое второе устройство грубого наведения тогда управляется управляющим устройством точного наведения его пары, которое впоследствии управляет и вторым устройством грубого наведения и устройством точного наведения;
- как только каждое второе устройство грубого наведения согласовано с управляющим устройством точного наведения рассматриваемой пары, управляющее устройство грубого наведения впоследствии управляет только первым устройством грубого наведения;
- при управлении пуском системы, активизации лазеров большой мощности и отслеживания цели на основании активной визуализации, предоставляемой высокоскоростными камерами и устройствами точного и грубого наведения, так, чтобы каждый лазерный источник большой мощности был наведен.
9. Способ по п. 8, отличающийся тем, что направление грубого наведения определяется внешним указанием объекта, или выполнением режима поиска, или ручным наведением оператором.
| US 20110253910 A1, 20.10.2011 | |||
| US 20110103410 A1, 05.05.2011 | |||
| СПОСОБ НАВЕДЕНИЯ ИЗЛУЧЕНИЯ НА ОБЪЕКТ | 1991 |
|
RU2110079C1 |
| EP 2283548 A1, 16.02.2011 | |||
| US 8415600 B2, 09.04.2013. | |||

