Изобретение относится к лазерной локации, в частности, к лазерным системам связи.
Известен способ наведения излучения на объект, заключающийся в формировании изображения объекта, определении его координат, определении наиболее яркой точки объекта и наведении на нее лазерного излучения.
К недостаткам известного способа может быть отнесена невысокая точность наведения, обусловленная рассогласованием спектров приемного и передающего каналов, ложной идентификацией объекта в присутствии помех, а также турбулентность атмосферы.
Известен также способ наведения излучения на объект, заключающийся в непрерывном подсвете объекта зондирующим лазерным излучением, приеме отраженного сигнала, формировании изображения и наведении рабочего лазерного излучения на наиболее яркую точку объекта.
К недостаткам данного способа относятся низкая скрытность, обусловленная непрерывным режимом работы лазера подсвета, и невысокая точность наведения, что связано с влиянием турбулентности среды распространения, статических неоднородностей среды для пространственно разнесенных каналов зондирующего и рабочего излучений.
В качестве прототипа выбран способ наведения излучения на объект, заключающийся в формировании изображения объекта, определении его угловых координат  , формировании вспомогательного лазерного излучения, оптически связанного с диаграммой направленности рабочего лазерного излучения, определении координат энергетического центра
, формировании вспомогательного лазерного излучения, оптически связанного с диаграммой направленности рабочего лазерного излучения, определении координат энергетического центра  вспомогательного лазерного излучения, формировании в момент времени t1 рабочего лазерного излучения в направлении
вспомогательного лазерного излучения, формировании в момент времени t1 рабочего лазерного излучения в направлении  , причем формирование вспомогательного лазерного излучения осуществляют непрерывно на длине волны, отличной от рабочей длины волны, а формирование изображения объекта осуществляют в видимом диапазоне.
, причем формирование вспомогательного лазерного излучения осуществляют непрерывно на длине волны, отличной от рабочей длины волны, а формирование изображения объекта осуществляют в видимом диапазоне.
Недостатком способа-прототипа является низкая точность, обусловленная ошибками наведения, связанными с атмосферной дисперсией и с дисперсией канала распространения, а также ошибкой, связанной с влиянием турбулентности на трассе распространения, не компенсируемой вследствие различных спектральных диапазонов приемного и передающего каналов.
Целью изобретения является повышение точности,
Цель достигается тем, что в способе наведения излучения на объект, заключающемся в формировании изображения объекта, определении его угловых координат  , формировании вспомогательного лазерного излучения, определении координат энергетического центра
, формировании вспомогательного лазерного излучения, определении координат энергетического центра  вспомогательного лазерного излучения, осуществлении отработки направления рабочего лазерного излучения с длиной волны λраб пропорционально
вспомогательного лазерного излучения, осуществлении отработки направления рабочего лазерного излучения с длиной волны λраб пропорционально  , в момент времени t1 осуществляют подсвет объекта первым импульсом зондирующего лазерного излучения с длиной волны λраб и определяют дальность до объекта, изображение объекта формируют посредством подсвета в момент времени t2 > t1 вторым импульсом зондирующего лазерного излучения, спектральной селекции и усиления отраженного от объекта зондирующего лазерного излучения, причем вспомогательное лазерное излучение формируют в момент времени tв, t2 < tв < t2 + 2R/C на длине волны λраб, , где R - дальность до объекта, C - скорость света, а формирование рабочего лазерного излучения осуществляют с временной задержкой относительно момента времени tв, меньшей времени замороженности атмосферы.
, в момент времени t1 осуществляют подсвет объекта первым импульсом зондирующего лазерного излучения с длиной волны λраб и определяют дальность до объекта, изображение объекта формируют посредством подсвета в момент времени t2 > t1 вторым импульсом зондирующего лазерного излучения, спектральной селекции и усиления отраженного от объекта зондирующего лазерного излучения, причем вспомогательное лазерное излучение формируют в момент времени tв, t2 < tв < t2 + 2R/C на длине волны λраб, , где R - дальность до объекта, C - скорость света, а формирование рабочего лазерного излучения осуществляют с временной задержкой относительно момента времени tв, меньшей времени замороженности атмосферы.
На чертеже приведена блок-схема устройства наведения излучения на объект, реализующего способ, соответствующий изобретению.
Устройство наведения излучения на объект содержит источник рабочего лазерного излучения 1, источник зондирующего лазерного излучения 2, источник вспомогательного лазерного излучения 3, селектор угловых мод 4 с первым объективом 5, первым светоделителем 6 и модулятором 7, второй объектив 8, третий (приемный) объектив 9, квантовый усилитель 10, фотоприемное устройство 11, блок обработки 12, блок определения дальности 13, формирователь временных интервалов (ФВИ) 14, коммутатор 15, вычитающее устройство 16, привод опорно-поворотного устройства (ОПУ) 17, блок управления 18 приводом ОПУ, поворотное зеркало 19, реотражатель 20, затвор 21, второй светоделитель 22, блоки накачки 23, 24, 25 соответственно источников рабочего, зондирующего и вспомогательного лазерных излучений, блок управления 26 квантового усилителя.
Устройство наведения излучения на объект работает следующим образом.
По данным внешнего целеуказания (ЦУ) ожидаемые координаты объекта поступают в блок управления 18 приводом ОПУ 17, который вырабатывает управляющее воздействие на привод ОПУ 17, выходы двигателей которого через редукторы подключены к ОПУ, несущему поворотное зеркало 19. В результате зеркало 19 ориентируется таким образом, чтобы линия визирования была выставлена в точку ожидания.
В момент времени t1 ФВИ 14 формирует импульс запуска, по которому осуществляют накачку активной среды источника зондирующего лазерного излучения 2 с помощью блок накачки 24. Источник зондирующего лазерного излучения 2 формирует импульс с длиной волны λ = λраб, который через объективы 8 и 5 проходит в передающий канал, образованный элементами 1, 22, 19, и подсвечивают объект. Отраженное от объекта излучение через поворотное зеркало 19, второй светоделитель 22, открытый затвор 21, приемный объектив 9, квантовый усилитель 10 поступает на фотоприемное устройство 11.
Зарегистрированное излучение поступает на блок определения дальности 13, определяющий временной интервал δ t между посылкой и приемом первого импульса зондирующего лазерного излучения. Очевидно, что δ t = 2R/C, где C - скорость распространения излучения, R - дальность до объекта. Полученное значение дальности вводится в ФВИ 14, где используется при формировании временного цикла работы устройства.
После поступления сигнала δ t формируют второй импульс зондирующего лазерного излучения в момент времени t2. С временной задержкой Δτ < δt относительно t2 формируют импульс вспомогательного лазерного излучения длительностью τВ. . Излучение источника вспомогательного лазерного излучения 3, формируемого после накачки его блока накачки 25, отражаясь от первого светоделителя 6, поступает на модулятор 7 селектора угловых мод 4 и подсвечивает его излучением на рабочей длине волны λраб. . Модулятор 7 может быть выполнен в виде матричного пространственно-временного модулятора света. Отраженное от него излучение проходит через первый объектив 5 и невозбужденную активную среду источника рабочего лазерного излучения 1. Отражаясь от второго светоделителя 22, вспомогательное лазерное излучение поступает на реотражатель 20 и после отражения от него - в приемный канал
Приемный объектив 9 фокусирует вспомогательное лазерное излучение на фотоприемное устройство 11. Зарегистрированный сигнал поступает на блок обработки 12, реализующий операцию определения координат наиболее яркой точки объекта путем разделения потока излучения на N парциальных потоков и выделения максимального из них. В результате определяются координаты энергетического центра пучка вспомогательного лазерного излучения  характеризующие величину углового рассогласования визирных осей приемного и передающего каналов.
характеризующие величину углового рассогласования визирных осей приемного и передающего каналов.
В момент времени  в приемный канал поступает отраженный от объекта второй импульс зондирующего лазерного излучения. Формируемое изображение объекта используют для определения его угловых координат
в приемный канал поступает отраженный от объекта второй импульс зондирующего лазерного излучения. Формируемое изображение объекта используют для определения его угловых координат  в блоке обработки 12. Полученные координаты
в блоке обработки 12. Полученные координаты  поступают на коммутатор 15, откуда подаются на первый вход вычитающего устройства 16, на второй вход которого подаются полученные ранее координаты энергетического центра вспомогательного лазерного излучения
поступают на коммутатор 15, откуда подаются на первый вход вычитающего устройства 16, на второй вход которого подаются полученные ранее координаты энергетического центра вспомогательного лазерного излучения  . На выходе вычитающего устройства 16 формируется сигнал управления модулятором 7, пропорциональный
. На выходе вычитающего устройства 16 формируется сигнал управления модулятором 7, пропорциональный  необходимый для коррекции направления оси рабочего лазерного излучения.
необходимый для коррекции направления оси рабочего лазерного излучения.
После отработки управляющего воздействия, спустя интервал времени Δ t (например, априорно заданный), подается сигнал на накачку активной среды (блок 23) источника рабочего лазерного излучения 1. При этом интервал Δ t выбран меньшим времени замороженности атмосферы. Это позволяет считать, что в силу малого временного интервала Δ t, не превышающего интервал корреляции временных флуктуаций турбулентной среды распространения излучения, ее искажения (фазовые и амплитудные неоднородности) при распространении отраженного от объекта второго импульса зондирующего лазерного излучения и при формировании рабочего лазерного излучения сильно коррелированы. Поэтому фазовые неоднородности наклона волнового фронта одинаковы при распространении отраженного от объекта второго импульса зондирующего лазерного излучения и при прохождении рабочего лазерного излучения.
Формирование рабочего лазерного излучения в заданном направлении осуществляется путем подачи управляющего воздействия на элемент разложения модулятора 7, соответствующий угловому направлению  Генерация рабочего лазерного излучения приводит к формированию совокупности угловых мод внутри некоторого телесного угла, из которых селектором угловых мод 4 будет выделена только мода, соответствующая угловому направлению
Генерация рабочего лазерного излучения приводит к формированию совокупности угловых мод внутри некоторого телесного угла, из которых селектором угловых мод 4 будет выделена только мода, соответствующая угловому направлению  Усиленное рабочее лазерное излучение через второй светоделитель 22 и поворотное зеркало 19 направляется на объект. Для того чтобы приемный канал не подвергался воздействию излучения, затвор 21 закрывают и снимают накачку с усилителя 10, что обеспечивается подачей соответствующего управляющего сигнала с ФВИ 14.
Усиленное рабочее лазерное излучение через второй светоделитель 22 и поворотное зеркало 19 направляется на объект. Для того чтобы приемный канал не подвергался воздействию излучения, затвор 21 закрывают и снимают накачку с усилителя 10, что обеспечивается подачей соответствующего управляющего сигнала с ФВИ 14.
Вследствие совмещения спектрального диапазона работы приемного и передающего каналов обеспечивается устранение влияния дисперсии среды распространения. А поскольку определение положения визирной оси передающего канала относительно визирной оси приемного канала, определение координат объекта и формирование рабочего лазерного излучения осуществляется за время, меньшее времени замороженности атмосферы, то ошибки наведения, обусловленные неоднородностями среды распространения, исключаются.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ ИЗЛУЧЕНИЯ НА ДВИЖУЩИЙСЯ ОБЪЕКТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2125279C1 |
| СПОСОБ ДОСТАВКИ ИЗЛУЧЕНИЯ НА ДВИЖУЩИЙСЯ ОБЪЕКТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2191406C1 |
| СПОСОБ ДОСТАВКИ ИЗЛУЧЕНИЯ НА ДВИЖУЩИЙСЯ ОБЪЕКТ И КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2124740C1 |
| ЛАЗЕРНОЕ УСТРОЙСТВО КОНТРОЛЯ ОКОЛОЗЕМНОГО КОСМИЧЕСКОГО ПРОСТРАНСТВА | 2012 |
|
RU2502647C1 |
| СПОСОБ ЛАЗЕРНОЙ ЛОКАЦИИ И ЛАЗЕРНОЕ ЛОКАЦИОННОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2183841C1 |
| СПОСОБ ЛАЗЕРНОЙ ЛОКАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2152056C1 |
| СПОСОБ ДОСТАВКИ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ НА ДВИЖУЩИЙСЯ ОБЪЕКТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2541505C2 |
| ПРИБОР ДЛЯ ДНЕВНОГО И НОЧНОГО НАБЛЮДЕНИЯ И ПРИЦЕЛИВАНИЯ | 2006 |
|
RU2310219C1 |
| СПОСОБ ДОСТАВКИ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ НА ОБЪЕКТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2270523C1 |
| СПОСОБ НАВЕДЕНИЯ НА УДАЛЕННЫЙ ОБЪЕКТ ИМПУЛЬСНОГО ЭЛЕКТРОМАГНИТНОГО ИЗЛУЧЕНИЯ | 2014 |
|
RU2589763C2 |
Использование: в лазерной локации, в частности, в лазерных системах связи. Сущность: в способе наведения излучения на объект, заключающемся в формировании изображения объекта, определении его угловых координат  формировании вспомогательного лазерного излучения, определении координат
формировании вспомогательного лазерного излучения, определении координат  его энергетического центра и отработке направления рабочего лазерного излучения пропорционально
его энергетического центра и отработке направления рабочего лазерного излучения пропорционально  в момент времени t1 осуществляют подсвет объекта первым импульсом зондирующего лазерного излучения и определяют дальность R до объекта, изображение объекта формируют посредством подсвета в момент времени t2 больше t1 вторым импульсом зондирующего лазерного излучения, а вспомогательное лазерное излучение формируют в момент времени tв, t2 меньше tв, меньше 2R/C, где C - скорость света, а формирование рабочего лазерного излучения осуществляют с временной задержкой относительно момента времени tв, меньшей времени замороженности атмосферы. 1 ил.
в момент времени t1 осуществляют подсвет объекта первым импульсом зондирующего лазерного излучения и определяют дальность R до объекта, изображение объекта формируют посредством подсвета в момент времени t2 больше t1 вторым импульсом зондирующего лазерного излучения, а вспомогательное лазерное излучение формируют в момент времени tв, t2 меньше tв, меньше 2R/C, где C - скорость света, а формирование рабочего лазерного излучения осуществляют с временной задержкой относительно момента времени tв, меньшей времени замороженности атмосферы. 1 ил.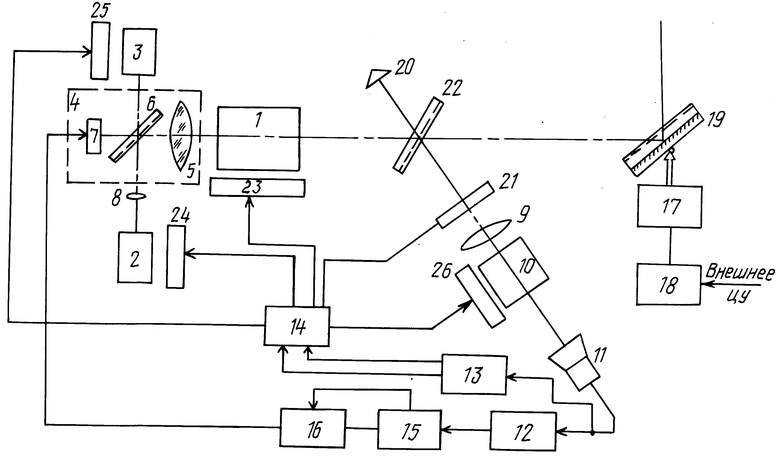
Способ наведения излучения на объект, заключающийся в формировании изображения объекта, определении его угловых координат  формировании вспомогательного лазерного излучения, определении координат энергетического центра
формировании вспомогательного лазерного излучения, определении координат энергетического центра  вспомогательного лазерного излучения, осуществление отработки направления рабочего лазерного излучения с длиной волны λраб пропорционально
вспомогательного лазерного излучения, осуществление отработки направления рабочего лазерного излучения с длиной волны λраб пропорционально  отличающийся тем, что в момент времени t1 осуществляют подсвет объекта первым импульсом зондирующего лазерного излучения с длиной волны λраб и определяют дальность до объекта, изображение объекта формируют посредством подсвета в момент времени t2 > t1 вторым импульсом зондирующего лазерного излучения, спектральной селекции и усиления отраженного от объекта зондирующего лазерного излучения, причем вспомогательное лазерное излучение формируют в момент времени tb, t2 < tb < t2 + 2R/C на длине волны λраб, где R - дальность до объекта, C - скорость света, а формирование рабочего лазерного излучения осуществляют с временной задержкой относительно момента времени tb, меньшей времени замороженности атмосферы.
отличающийся тем, что в момент времени t1 осуществляют подсвет объекта первым импульсом зондирующего лазерного излучения с длиной волны λраб и определяют дальность до объекта, изображение объекта формируют посредством подсвета в момент времени t2 > t1 вторым импульсом зондирующего лазерного излучения, спектральной селекции и усиления отраженного от объекта зондирующего лазерного излучения, причем вспомогательное лазерное излучение формируют в момент времени tb, t2 < tb < t2 + 2R/C на длине волны λраб, где R - дальность до объекта, C - скорость света, а формирование рабочего лазерного излучения осуществляют с временной задержкой относительно момента времени tb, меньшей времени замороженности атмосферы.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СПОСОБ ПРОИЗВОДСТВА ПРУЖИННОГО ШТЫРЯ | 0 |
|
SU321891A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ | 0 |
|
SU270526A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
