Изобретение относится к автоматическому регулированию, предназначено для систем автоматического наблюдения и сопровождения за подвижными объектами в пространстве преимущественно с качающегося основания и может быть использовано для управления воздушным движением.
Известна телевизионно-оптическая система сопровождения со следящим стробом, содержащая телевизионную камеру, устройство обработки видеосигнала, решающее устройство, привод наведения [1] (Барсуков Ф.И., Величкин А.И., Сухарев А.Д. Телевизионные системы летательных аппаратов. - М.: Советское радио, 1979. - 256 с., стр.232, рис.7.17, аналог).
Недостатком данной телевизионной системы является недостаточная точность сопровождения целей с подвижного основания из-за отсутствия системы стабилизации оптической линии визирования и, как следствие, наличие динамической инерционности исполнительного привода и контура электронного слежения. Эта система неспособна к автоматическому захвату объекта на автосопровождение.
Известна также телевизионно-оптическая система [2] (Грязин Г.Н. Оптико-электронные системы для обзора пространства: Системы телевидения. Л., Машиностроение, Ленинградское отделение. - 1988, стр.8, 9, рис.4, аналог), содержащая последовательно соединенные телевизионный датчик, устройство усиления и обработки сигнала, вычислительное устройство (в совокупности образующие пеленгатор) и исполнительный орган. Исполнительный орган, выполняющий функции блока наведения и стабилизации, кинематически связан с оптико-электронным (телевизионным) датчиком пеленгатора.
В известной системе переход в автоматический режим осуществляется посредством предварительного разворота пеленгатора на предназначенный для сопровождения объект таким образом, чтобы он оказался в пределах окна захвата внутри поля зрения. Однако при увеличении угловых скоростей и ускорений визирования объекта вероятность перехода в автоматический режим сопровождения падает. Это объясняется, с одной стороны, падением контраста изображения объекта, перемещающегося относительно растра (см. Грязин Г.Н. Оптико-электронные системы для обзора пространства: Системы телевидения. Л., Машиностроение, Ленинградское отделение. - 1988, стр.209-212), с другой стороны, если предварительный разворот пеленгатора осуществляется в полуавтоматическом режиме с участием человека-оператора, увеличиваются ошибки сопровождения высокоскоростного объекта оператором в силу ограниченности его динамических характеристик, приводящих к недопустимым переходным процессам в оптико-электронной системе, вызывающим срыв автосопровождения [3] (Цибулевский И.Е. Человек как звено следящей системы. - М., Наука, 1981. - 288 с.).
Недостатком оптических систем сопровождения является их высокая чувствительность к метеоусловиям и оптическим помехам, таким как атмосферная дымка, туман, дымопылевые помехи, засветки от ярких источников света и т.д., что объясняется работой телекамеры в видимой области спектра.
Известен радиолокатор сопровождения, содержащий передатчик, приемник, последовательно соединенные антенну, двигатель вращения облучателя, генератор опорных напряжений, блок выделения сигналов ошибки, устройство наведения и стабилизации [4] (Динамика следящих приводов. /Под ред. Л.В. Рабиновича. - М.: Машиностроение, 1982. - 496 с., стр.132, рис.2.26), [5] (Радиолокационные устройства. / Под ред. В.В.Григорина-Рябова. - М.: Советское радио. - 1970, стр.570, рис.21.12, аналог).
Недостатком радиолокатора является чувствительность к средствам радиоэлектронного излучения и затруднительность работы при малых углах места из-за близости подстилающей поверхности.
Наиболее близкой по технической сущности к изобретению является свободная от основных недостатков телевизионной и радиолокационной систем известная интегрированная локационно-оптическая автоматическая система сопровождения подвижных объектов с заданной точностью, преимущественно с подвижного основания, которая состоит из последовательно соединенных оптико-электронного пеленгатора, блока управления оптико-электронной системы, последовательно соединенных устройства автоматического сопровождения, цифровой приборной системы, содержащей последовательно соединенные преобразователь «код-напряжение», второй коммутатор, интегрирующий привод и механическую передачу, второй выход которой подключен ко второму входу преобразователя «код-напряжение» и устройства наведения и стабилизации, включающего последовательно соединенные преобразователь стабилизированных координат в нестабилизированные, приборную следящую систему преобразователя координат и привод наведения и стабилизации, а также блок коррекции сигнала задающей скорости приборной следящей системы преобразователя координат, вход которого соединен со вторым выходом приборной следящей системы преобразователя координат, а выход - со вторым входом привода наведения и стабилизации, контура подслеживания выходного сигнала устройства автоматического сопровождения за выходом устройства наведения и стабилизации, содержащего последовательно соединенные первый блок сравнения, блок формирования траектории подслеживания, первый коммутатор и второй блок сравнения, и дополнительный преобразователь нестабилизированных координат в стабилизированные. Локационный и оптико-электронный пеленгаторы механически соединены между собой и имеют кинематическую связь с выходным валом устройства наведения и стабилизации, а их вторые выходы подключены соответственно к первому и второму входу формирователя логики режимов, первый и второй выходы которого подключены соответственно к управляющим входам первого и второго коммутаторов. При этом второй выход локационного пеленгатора соединен со вторым входом второго блока сравнения, выход которого соединен со входом устройства автоматического сопровождения, а выход устройства автоматического сопровождения одновременно соединен с первым входом первого блока сравнения, второй выход устройства наведения и стабилизации соединен со входом дополнительного преобразователя нестабилизированных координат в стабилизированные, выход которого соединен со вторым входом первого блока сравнения, а выход блока управления оптико-электронной системы соединен со вторым входом второго коммутатора.
Устройство автоматического сопровождения содержит последовательно соединенные первый интегратор, блок сравнения, второй интегратор, а также усиливающий элемент, входом соединенный с входом первого интегратора, а выходом - со вторым входом блока сравнения, причем входом устройства автоматического сопровождения является вход первого интегратора, а выходом - выход второго интегратора [6] (Патент РФ №2321020, МПК7 G01S 13/66, G01S 17/66 - прототип).
В известной интегрированной автоматической системе сопровождения повышена точность сопровождения наблюдаемого объекта и обеспечивается устойчивое сопровождение объекта за счет возможности перехода сопровождения с локационного режима в оптический и обратно.
Названная интегрированная автоматическая система сопровождения объединяет достоинства двух пеленгаторов локационного и телевизионного. Система обеспечивает автоматизацию захвата на автосопровождение в оптическом и локационном режимах. Однако ее недостатком является низкая точность сопровождения визируемых объектов в момент переключения пеленгаторов и необходимость применения специальных средств коррекции, обеспечивающих плавное без скачков и колебаний движение выходного вала устройства наведения и стабилизации. В момент переключения пеленгаторов на вход устройства наведения и стабилизации поступает ступенчатый входной сигнал. В результате переходного процесса возникают большие угловые скорости пеленгаторов относительно сопровождаемого объекта, и из-за ограниченной частоты опроса датчиков и запаздывания в обработке сигналов точность выделения координат подвижного объекта снижается, возможна его кратковременная потеря. Необходимость плавного без скачков наведения телевизионного пеленгатора объясняется типом используемого чувствительного элемента в конструкции телевизионного пеленгатора, работающего на принципе накопления заряда, который предполагает отсутствие перемещений проекции цели на фотокатоде чувствительного элемента оптического пеленгатора относительно установившегося положения. При наличии колебаний проекции цели возникает явление «размытия» изображения цели на видеоконтрольном устройстве, что приводит к искажению образа цели на фотокатоде чувствительного элемента оптико-электронного пеленгатора и, в конечном счете, возможна потеря сопровождения подвижного объекта.
Задачей предлагаемого изобретения является повышение точности и устойчивости сопровождения автоматической системой подвижных объектов в установившемся и переходном режимах за счет исключения скачков по положению и по скорости при переключении структур системы сопровождения с локационной в оптическую и обратно.
Решение указанной задачи достигается за счет того, что в систему сопровождения подвижных объектов, содержащую локационный и оптико-электронный пеленгаторы, первые выходы которых соединены соответственно с первым и вторым входами формирователя логики режимов, предназначенного для обеспечения перехода сопровождения подвижных объектов с локационного режима в оптический и обратно, первый и второй коммутаторы, управляющие входы которых соединены соответственно с первым и вторым выходом формирователя логики режимов, первый преобразователь координат из нестабилизированной системы координат в стабилизированную, устройство наведения и стабилизации, включающее последовательно соединенные преобразователь стабилизированных координат в нестабилизированные и привод наведения и стабилизации, при этом локационный и оптико-электронный пеленгаторы механически соединены друг с другом и кинематически связаны с выходом устройства наведения и стабилизации, дополнительно введены последовательно соединенные первый блок коррекции и первый сумматор, последовательно соединенные телевизионный автомат, второй преобразователь нестабилизированных координат в стабилизированные и второй блок коррекции, а также масштабный усилитель, выход которого соединен с первым входом первого коммутатора, при этом второй выход оптико-электронного пеленгатора соединен с входом масштабного усилителя и входом телевизионного автомата, второй выход которого соединен с входом оптико-электронного пеленгатора, второй выход локационного пеленгатора подключен ко второму входу первого коммутатора, выход которого соединен с входом первого преобразователя нестабилизированных координат в стабилизированные, выходом соединенного с входом первого блока коррекции, вход второго коммутатора соединен с выходом второго блока коррекции, а выход - со вторым входом первого сумматора, выход которого подключен к входу устройства наведения и стабилизации.
Телевизионный автомат содержит последовательно соединенные задающее устройство, вычислительное устройство и электронное исполнительное устройство, выход которого соединен со вторым входом задающего устройства, причем входом телевизионного автомата является первый вход задающего устройства, а первым и вторым выходами соответственно - выход электронного исполнительного устройства и второй выход вычислительного устройства.
Второй блок коррекции содержит последовательно соединенные блок сравнения, первый усилитель с переменным коэффициентом усиления, первый интегратор, второй сумматор, второй интегратор, третий сумматор и оператор дискретного преобразования, а также второй усилитель с переменным коэффициентом усиления, вход которого подключен к выходу блока сравнения, а выход - ко второму входу второго сумматора, выход первого интегратора соединен со вторым входом третьего сумматора, а выход оператора дискретного преобразования - со вторым входом блока сравнения, причем входом второго блока коррекции является первый вход блока сравнения, а выходом - выход второго интегратора.
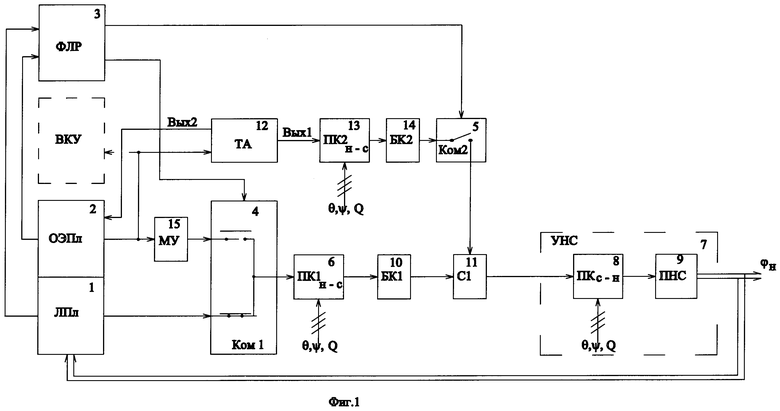
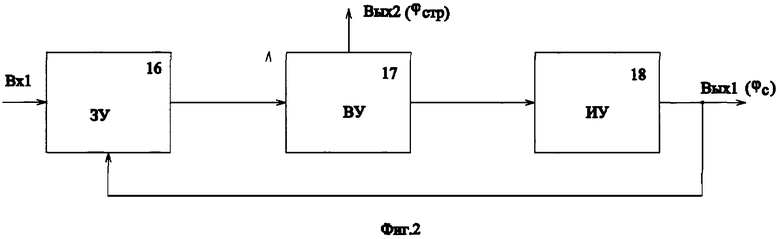
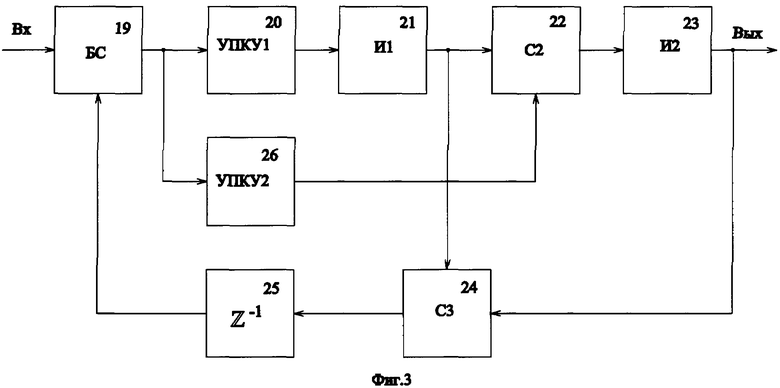
В качестве иллюстрации на фиг.1 приведена функциональная схема для одного канала предлагаемой системы сопровождения, фиг.2 - функциональная схема телевизионного автомата, фиг.3 - функциональная схема второго блока коррекции, фиг.4 - изображение объекта на видеоконтрольном устройстве оптико-электронной системы сопровождения (ОЭСС), фиг.5 - измерительная и следящая системы координат ОЭСС, фиг.6, 7 - изображение объекта и строба на экране видеоконтрольного устройства при различных дальностях.
Система сопровождения состоит из локационного 1 (ЛПл) и оптико-электронного 2 (ОЭПл) пеленгаторов, формирователя логики режимов 3 (ФЛР), первого 4 (Ком1) и второго 5 (Ком2) коммутаторов, первого преобразователя координат из нестабилизированной системы координат в стабилизированную 6 (ПК1Н-C), устройства наведения и стабилизации 7 (УНС), состоящего из последовательно соединенных преобразователя координат из стабилизированной системы координат в нестабилизированную 8 (ПКС-H) и привода наведения и стабилизации 9 (ПНС), последовательно соединенных первого блока коррекции 10 (БК1) и первого сумматора 11 (С1), последовательно соединенных телевизионного автомата 12 (ТА), второго преобразователя координат из нестабилизированной системы координат в стабилизированную 13 (ПК2Н-C), второго блок коррекции 14 (БК2), масштабного усилителя 15 (МУ).
Телевизионный автомат состоит из последовательно соединенных задающего устройства 16 (ЗУ), вычислительного устройства 17 (ВУ), электронного исполнительного устройства 18 (ИУ).
Второй блок коррекции состоит из последовательно соединенных блока сравнения 19 (БС), первого усилителя с переменным коэффициентом усиления 20 (УПКУ1), первого интегратора 21 (И1), второго сумматора 22 (С2), второго интегратора 23 (И2), третьего сумматора 24 (С3), оператора дискретного преобразования 25 (Z-1), а также второго усилителя с переменным коэффициентом усиления 26 (УПКУ2).
Все используемые составные части системы сопровождения являются известными, либо могут быть получены из известных устройств путем их объединения известными методами.
Оптико-электронный пеленгатор может быть выполнен как это описано в [1] (Барсуков Ф.И., Величкин А.И., Сухарев А.Д. Телевизионные системы летательных аппаратов. - М., Советское радио, 1979). Локационный пеленгатор может быть взят аналогичным [7] (Максимов М.В., Горгонов Г.И. Радиоэлектронные системы самонаведения. - М., Радио и связь, 1982, стр.219, рис.6.1), можно также использовать и лазерную локационную установку. Коммутаторы могут быть реализованы на герконах, реле, электронных ключах и т.п. Блок сравнения, сумматор, а также масштабный усилитель могут быть реализованы на операционных усилителях [8] (Тетельбаум И.И., Шнейдер Ю.Р. 400 схем для АВМ. - М., Энергия, 1978) или цифровых микросхемах. Формирователь логики режимов может быть изготовлен на базе логических микросхем [9] (Павлов В.В. Управляющие устройства логического типа. - М., Энергия, 1968). Преобразователь координат из стабилизированной системы координат в нестабилизированную и из нестабилизированной системы координат в стабилизированную могут быть сделаны, как это описано в [10] (Ривкин С.С. Стабилизация измерительных устройств на качающемся основании. - М., Наука, 1978). Устройство наведения и стабилизации может быть реализовано как в прототипе, на базе гидравлических, электрических двигателей и сервоприводов как описано в [11] (Чиликин М.Г., Сандлер А.С. Общий курс электропривода. - М., Энергоиздат, 1981). При необходимости работы при больших углах возвышения или существенных значениях амплитуды качек, когда система может потерять устойчивость в результате возникновения положительных перекрестных связей из-за несовпадения измерительной и исполнительной систем координат УНС дополняется преобразователем координат. Например, УНС может представлять собой последовательно соединенные преобразователь координат из стабилизированной системы координат пеленгатора в нестабилизированную систему координат сервопривода и сам привод наведения и стабилизации совместно с механической передачей. Выходной вал привода наведения и стабилизации ПНС при этом является выходным валом устройства наведения и стабилизации. Блоки коррекции БК1, БК2 при известных требованиях к системе сопровождения могут быть сформированы по правилам, изложенным в [12] (Бессекерский В.А., Попов Е.П. Теория систем автоматического регулирования. - М., Наука, 1973) с реализацией аппаратной части на основе методов, приведенных в [8] (Тетельбаум И.И., Шнейдер Ю.Р. 400 схем для АВМ. - М., Энергия, 1978), синтез параметров БК1 в виде ПИД-регулятора и примеры реализации и моделирования регулятора в составе динамической системы приведены в [13, 14] (Герман-Галкин С.Г. Компьютерное моделирование полупроводниковых систем в MATLAB 6.0: Учебное пособие. - С-Пб.: КОРОНА принт, 2001. - 320 с., Ануфриев И.Е. Самоучитель MatLad 5.3/6.х - С-Пб.: БХВ-Петербург, 2003.- 736 с.: ил.). Первое и второе устройство с переменным коэффициентом усиления УПКУ1, УПКУ2 могут быть реализованы программно или на операционных усилителях в соответствии с рекомендациям [15] (Чернов В.Г. Устройства ввода вывода аналоговой информации для цифровых систем сбора и обработки данных. - М., Машиностроение, 1988. - 184 с., стр.33, рис.20). Вычислительное устройство ВУ может быть реализовано на базе быстродействующих сигнальных процессорах как это описано в [16] Руководство пользователя по сигнальным микропроцессорам семейства ADSP 2100 / Пер. с англ. О.В.Луневой; под ред. А.Д.Викторова, С-Пб. Гос. ун-т. - С-Пб., 1997. - 520 с. Реализация и работа электронного исполнительного устройства ИЭУ телевизионного автомата подробно описаны в [1] Барсуков Ф.И., Величкин А.И., Сухарев А.Д. Телевизионные системы летательных аппаратов. - М.: Советское радио, 1979. - 256 с.
Работа системы осуществляется следующим образом. Пеленгаторы 1, 2 ведут слежение за целью одновременно и выдают сигналы, пропорциональные угловому отклонению сопровождаемой цели от линии визирования независимо один от другого. Устойчивость сопровождения цели и возможность восстановления сопровождения в автоматическом режиме в случае перерыва оптической связи или потери объекта пеленгатором обеспечивается построением структуры системы сопровождения подвижных объектов. Система сопровождения включает в себя локационный и оптико-электронный пеленгаторы, механически соединенные между собой и имеющие кинематическую связь с выходным валом устройства наведения и стабилизации. Пеленгаторы также последовательно соединены с формирователем логики режимов, подключенным к управляющим входам коммутаторов. Формирователь логики режимов 3 анализирует наличие признака автосопровождения в обоих каналах и выдает сигнал управления на первый и второй коммутаторы 4, 5, которые обеспечивают переход сопровождения с локационного режима в оптический и обратно переключением структур с помощью контактов коммутаторов. Коммутаторы могут находиться в двух состояниях - включенном или выключенном. Включен - режим управления УНС от ЛПл, отключен - режим управления УНС от ОЭПл.
Локационный режим сопровождения объектов обеспечивается структурой контура, включающего приемник, передатчик, антенный переключатель, синхронизатор системы сопровождения по дальности и угловым координатам и устройство наведения и стабилизации. Приемник, передатчик, антенный переключатель, синхронизатор системы сопровождения по угловым координатам в совокупности представляют собой локационный пеленгатор. Локационный пеленгатор определяет положение цели относительно оси диаграммы направленности антенны. Сигналы о положении цели после звена коррекции 10 (БК1) подаются на вход устройства наведения и стабилизации 7 (УНС), и оно осуществляет разворот локационного пеленгатора до тех пор, пока цель не окажется на оси диаграммы направленности. УНС позволяет также компенсировать качки носителя.
Оптический режим сопровождения система обеспечивает структурой, содержащей последовательно соединенные телевизионный датчик, устройство усиления и обработки видеосигнала, вычислительное устройство в совокупности образующее оптико-электронный пеленгатор 2 ОЭПл, устройство коррекции 10 (БК1) и 7 (УНС). Исполнительный орган УНС 7 общий для ЛПл и ОЭПл. С учетом того, что управляющие сигналы содержат информацию о качках носителя, исполнительный орган выполняет функции устройства наведения и стабилизации и кинематически связан с оптико-электронным датчиком пеленгатора.
Сопровождение подвижной цели происходит следующим образом. После того, как по сигналу от внешней системы пеленгатор развернут в направлении цели с точностью, достаточной для взятия ее на сопровождение, пеленгатор осуществляет захват цели и начинает вырабатывать условные координаты цели относительно оптической оси или оси антенны радиолокатора. Для того чтобы исключить из сигнала составляющую от качки и уменьшить перекрестные связи между каналами, сигнал с выхода пеленгатора пересчитывают в стабилизированную систему координат, например, по зависимостям (1)


δε, δβ - сигналы рассогласования в нестабилизированной системе координат;
δεc, δβc - сигналы рассогласования в стабилизированной системе координат;
γ - угол скрутки нестабилизированной системы координат ([10], стр.138).
Полученный в пеленгаторе сигнал через коммутатор и преобразователь координат поступает на вход корректирующего устройства БК1 (10), где над ним проводятся такие операции, чтобы, обеспечивая устойчивость системы управления, добиться требуемых параметров по точности и характеристикам переходных процессов ([12] Бессекерский В.А., Попов Е.П. Теория систем автоматического регулирования. - М., Наука, 1973).
Поскольку диаграмма направленности луча (1-2 град.) локационного пеленгатора (1) существенно больше величины следящего строба (1-5 мрад) оптико-электронного пеленгатора (2) и, как правило, превышает по величине погрешность целеуказания, первоначально объект берется на автосопровождение локационным пеленгатором. Он выдает признак автосопровождения объекта в формирователь логики режимов (3), который обеспечивает подключение сигнала со второго выхода ЛПл через контакты первого коммутатора после коррекции в БК1 (10) ко входу устройства наведения и стабилизации УНС (7). Выходной вал УНС разворачивает пеленгаторы (1, 2) или их передающие устройства в сторону цели таким образом, чтобы цель оказалась на оси диаграммы направленности ЛПл (1). Поступающие на вход УНС (7) стабилизированные координаты визируемой цели преобразуются в нестабилизироканные в преобразователе координат (8). Он может быть реализован, например, с использованием зависимостей, предложенных ([10] Ривкин С.С. Стабилизация измерительных устройств на качающемся основании. - М., Наука, 1978)




где εH, gH - углы наведения УНС в нестабилизированной системе координат;
εC, βC - углы наведения УНС в стабилизированной системе координат;
Q, ψ, θ - углы курса, тангажа и крена носителя соответственно.
Следует отметить, углы качек носителя используются также в преобразователе координат из нестабилизированной системы координат в стабилизированную 6 для расчета угла скрутки γ наряду со стабилизированными координатами. Поскольку использование этой информации очевидно, и она может быть получена от внешней системы или выработана самой системой сопровождения, подробно эти связи не описываются.
Однако погрешность определения координат цели с помощью ЛПл (1) существенно выше, чем с помощью ОЭПл (2). Поэтому целесообразно перевести управление устройством наведения и стабилизации (7) на сигнал от ОЭПл (2). Для этого необходимо обеспечить попадание изображения от цели в часть поля зрения ОЭПл (2), соответствующую стробу. Поскольку процессу сопровождения, особенно за высокоскоростными целями с быстродвижущегося носителя, присущи динамические ошибки, необходимо обеспечить перемещение следящего строба по полю зрения в соответствии с текущей величиной ошибки. Когда изображение объекта оказывается в стробе и сигнал от него становится отличным от фона, ОЭПл (2) выдает в ФЛР (3) информацию об этом со своего первого выхода. ФЛР (3) подключает с помощью первого коммутатора Ком 1 (4) вход УНС (7) через масштабный усилитель 15 (МУ) к выходу ОЭПл (2) и отключает сигнал с выхода ЛПл от управляющего входа УНС. В этом режиме выходной вал УНС (7) стремится развернуть пеленгатор так, чтобы изображение цели оказалось в центре растра, соответствующем положению оптической оси ОЭПл (2). Точность слежения за целью возрастает. Дополнительный эффект повышения точности определения координат достигается за счет того, что сигнал от УНС подается на контур следящего строба, при этом сигнал УНС выполняет роль компенсирующей связи, разгружающей контур следящего строба.
Система сопровождения имеет два основных контура сопровождения:
- контур с локационным пеленгатором (ЛПл) 1;
- контур с оптико-электронным пеленгатором (ОЭПл) 2;
В предлагаемой локационно-оптической системе сопровождения с электроприводом антенны зеркального типа структура системы управления построена с косвенной системой стабилизации, в которой качки носителя замеряются автономным гироскопическим прибором носителя и передаются на вход системы сопровождения по системе функциональных связей. Отличительной особенностью системы сопровождения является использование одной структуры контура управления для локационного и оптического режимов. При работе локационного или оптического режимов используются общие: устройство наведения и стабилизации 7 и блок коррекции 10. Для обеспечения одинаковости динамических характеристик в канал оптического пеленгатора введен масштабный усилитель 15, выравнивающий крутизны пеленгаторов.
Качество наведения на подвижную цель (время регулирования, перерегулирование) и динамическая точность в системе сопровождения обеспечиваются за счет блока коррекции (БК1) 10. БК1 выполнен в виде интегродифференцирующего фильтра 9 [13] Герман-Галкин С.Г. Компьютерное моделирование полупроводниковых систем в MATLAB 6.0: Учебное пособие. - С-Пб.: КОРОНА принт, 2001. - 320 с.) и имеет в своем составе два интегратора, и создает в контуре сопровождения (радиолокационном, оптическом) астатизм второго порядка по управлению. Введение астатизма второго порядка в контур сопровождения подвижного объекта обеспечивает требуемые точностные характеристики контура сопровождения радиолокационной системы, а повышенные динамические характеристики оптической системы сопровождения обеспечены организацией в контуре сопровождения многоканального управления (грубый и точный канал управления).
Такое построение системы сопровождения, в отличие от прототипа, в котором для каждой системы управления используются свои цепи коррекции и своя структура каждого контура управления, исключает скачки по скорости и по положению при переключении структур с локационного в оптический и обратно. Такой эффект в поведении системы сопровождения объясняется тем, что интеграторы общего для обеих систем блока коррекции БК1 «заряжены», их уровень сигнала соответствует фактической скорости и ускорению работы исполнительного органа системы сопровождения, и при переключении структур исключаются переходные процессы, обусловленные приведением цепей коррекции переключаемой структуры к фактическому уровню работы системы.
Повышенная точность подвижного объекта обеспечивается оптико-электронной системой сопровождения (ОЭСС).
Система состоит из 2-х контуров(каналов) управления:
- грубого канала, который обеспечивает движение телевизионно-оптического прибора;
- точного канала, обеспечивающего движение следящего строба или следящего растра, обрамляющего сопровождаемый объект.
Примеры многоконтурных систем, рассмотренные в [4], показывают, что если какое либо воздействие охвачено не одним, а несколькими контурами, то каждый из контуров может быть использован для уменьшения ошибки, вызванной данным воздействием. Поэтому с целью повышения точности относительно управляющего воздействия использована структура, имеющая два контура, охватывающих это воздействие. Координатой, расположенной за точкой приложения управления, является ошибка системы. Тракт прямой цепи системы W и жесткая отрицательная обратная связь по положению образуют первый основной контур, охватывающий управление. Чтобы ввести еще один контур, охватывающий управляющее воздействие, необходимо взять сигнал, несущий информацию об ошибке, подать его на вход нового специально образованного тракта и затем выходной сигнал этого тракта ввести в силовую часть системы. Дополнительный контур имеет собственный вход в силовую часть и доступные измерению и используемые для корректирующих связей внутренние координаты силовой части. Такой принцип повышения точности следящей системы относительно управляющего воздействия называется принципом разветвления силового тракта следящей системы, и сама система выполняется по двухканальной итеративной структуре. При этом следящая система имеет два контура. Первый контур включает пеленгационное устройство, приводимое в движение только от двигателя своего привода. Этот следящий контур условно называется грубым. Пеленгационное устройство грубого контура измеряет рассогласование между направлением вектора дальности и положением вала (платформы) грубого канала. Следящий контур канала по отклонению - ошибке называют точным или корректирующим. Пеленгационное устройство приводится двигателем грубого канала по сигналам грубого и точного контуров и измеряет рассогласование между направлением вектора дальности и положением следящего вала системы в целом.
Таким образом, итеративная структура следящей системы в целом имеет два независимых контура управления, причем управляющим воздействием точного канала является ошибка грубого канала, т.е систему в целом можно рассматривать как соединение двух независимых следящих контуров, образующих некоторую эквивалентную систему в целом, которая обладает определенными динамическими свойствами.
Для структурной схемы фиг.1 можно записать систему дифференциальных уравнений в операторной форме


Исключая из этой системы уравнений все переменные кроме θ и φВ, получаем передаточную функцию ошибки системы в целом

или 
где  - передаточная функция ошибки грубого канала;
- передаточная функция ошибки грубого канала;
 - передаточная функция ошибки точного канала.
- передаточная функция ошибки точного канала.
Анализ выражения 3 показывает, что порядок астатизма системы в целом равен сумме порядков астатизма грубого и точного каналов, а добротность системы в целом равна произведению добротностей каналов, что в итоге обеспечивает повышенную точность работы двухканальной итеративной системы.
Учитывая (фиг.1), что канал грубого отсчета, отрабатывающий управляющее воздействие, замкнут по положению, а суммирование сигналов по управлению φНГ и по отклонению φHT производится на выходе, причем WОБЩ=1, двухканальные следящие системы оказываются малочувствительными к отклонениям параметров и нелинейностям характеристик элементов системы. Одновременно, наличие пеленгационного устройства грубого канала позволяет реализовать канал связи по управлению с непосредственным его измерением, при этом увеличение суммарного астатизма системы по управлению и добротности двухканальной системы позволяет обеспечивать характеристики точности системы без использования инвариантного управления, не требуется дифференциатор в канале связи по управлению, что существенно облегчает получение высокой динамической точности даже при относительно высоких уровнях помех на выходе пеленгационного устройства. Указанные особенности двухканальных систем с итеративной иерархической структурой делают их особенно перспективными для применения в системах высокой точности.
Функциональная схема точного канала ОЭСС включает в себя пеленгатор ОЭПл 2, телевизионный автомат ТА 12, второй преобразователь координат ПК2Н-С 13, второй блок коррекции БК2 14, представляющий собой настраиваемый фильтр с полиноминальной функцией для расчета резонансной частоты фильтра, второй коммутатор Ком2 5, устройство наведения и стабилизации 7. Функциональная схема грубого канала ОЭСС включает в себя пеленгатор ОЭПл 2, масштабный усилитель МУ 15, первый преобразователь координат ПК1Н-С 6, первый блок коррекции БК1 10, устройство наведения и стабилизации УНС 7. Сложение сигналов управлений каналов грубого и точного отсчета производится в первом сумматоре С1 11.
В ОЭСС со следящим стробом, развертка проекции изображения осуществляется по всей рабочей поверхности светочувствительного слоя передающей трубки. Слежение за целью осуществляется специальным (следящим) стробом (окном слежения), который может просматриваться на вспомогательном видеоконтрольном устройстве (ВКУ), см. фиг.1.
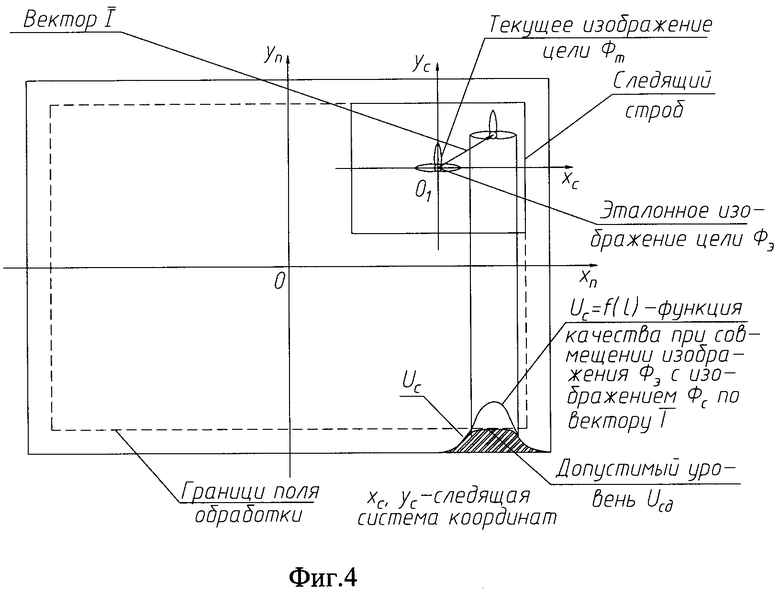
Изображение объекта (например, самолета) на видеоконтрольном устройстве оптической (телевизионной) системы сопровождения со следящим стробом (растром) с измерительной хп, уп и следящей хс, ус системами координат приведены на фиг.4.
При смещении цели следящий строб перемещается электронным исполнительным устройством ЭИУ 18 вслед за сопровождаемой целью, в виде специального изображения (перекрестия, засвеченного или затемненного квадрата и т.д.).
Следящий строб или перекрестие определяет положение начала следящей системы координат. За движением объекта следит строб. Одновременно поворачивается и телевизионно-оптический пеленгатор ОЭПл 2 для сближения центра камеры с центром строба.
При совместной работе контуров грубого и точного слежения обеспечивается высокоточное сопровождение.
Работа телевизионного автомата заключается в следующем: задающее устройство ЗУ 16 имеет в памяти изображение характерных объектов. Видеосигнал с телевизионного датчика оптического прибора поступает на устройство усиления и обработки видеосигнала телевизионной камеры, в котором проводится совмещение сигнала по времени и уровню, его обработка и ввод в вычислительное устройство ВУ 17.
Вычислительное устройство ВУ 17 извлекает необходимый информационный параметр и сравнивает его текущее значение с заданным, поступающим с ЗУ 16.
Вычислительное устройство ВУ 17 обеспечивает преобразование временного интервала, пропорционального отклонению проекции объекта на фотокатоде трубки от начала измерительной системы координат, связанной с этой поверхностью (разверткой), в соответствующий электрический сигнал.
Результирующий сигнал поступает на электронное исполнительное устройство ЭИУ 18, с которого поступает отрицательная обратная связь на ЗУ 16, замыкающая контур телевизионного автомата сопровождения ТА 12.
Выходная координата системы ТА 12 ϑс тождественна φс(ϑc=φс). Сопровождение происходит при изменяющихся параметрах объекта наблюдения.
В запоминающем устройстве имеется образ цели в виде точки, которая обрамляется самой малой рамкой строба. Всего имеется 8 рамок строба. Разрешающая способность оптической системы сопровождения определяется ценой деления, равной одному машинному элементу развертки. Для самой малой рамки строба цена машинного элемента 0,13 мрад, а самой большой - 1,36 мрад. Размер рамки строба по мере приближения цели к носителю увеличивается.
В ЗУ 16 происходит перезапись изображения цели по мере приближения ее к носителю.
Перезапись изображения производиться, если функция качества (ток фотокатода принимающей трубки ОЭСС) уменьшается ниже заданной границы (фиг.4). По величине и форме сигнала U=f(l) судят о коэффициенте пропускания атмосферы и оптики, и о наличии и величине шумов. По этой зависимости производят настройку и приемку изготовленных автоматов сопровождения.
Вычислительное устройство ВУ 16 может быть 3-х типов:
- устройство, обеспечивающее слежение (решение) за малоразмерными точечными целями;
- слежение за одним из краев площади цели;
- слежение за геометрическим центром проекции цели.
Часто используются также устройства, обеспечивающие на первом этапе слежение за точечной целью с последующим переходом на слежение за геометрическим центром площади проекции цели. Наибольшее распространение в решающих устройствах третьего вида, обеспечивающих слежение за геометрическим центром, получили амплитудный, логический и корреляционный методы обработки видеосигнала.
При амплитудном логическом методе видеосигнал представляет собой напряжение, пропорциональное только разности между яркостью цели и яркостью прилегающего к объекту участка фона. Для получения такого сигнала используется метод обращения к среднему уровню фона (средней яркости), пропорционально которому вырабатывается опорное напряжение.
Этот метод эффективен, если сопровождаемая цель наблюдается на сравнительно равномерном фоне (к примеру, самолет на чистом небе).
Если же цель находится на сложном фоне, этот метод дает большие ошибки. С приближением цели к носителю размер ее на фотокатоде передающей трубки будет увеличиваться, поэтому уменьшается крутизна пеленгационной характеристики пеленгатора (зависимость напряжения рассогласования от угла отклонения цели от линии визирования), что приводит к уменьшению чувствительности по угловым отклонениям. Этих недостатков лишен корреляционный метод обработки видеосигнала.
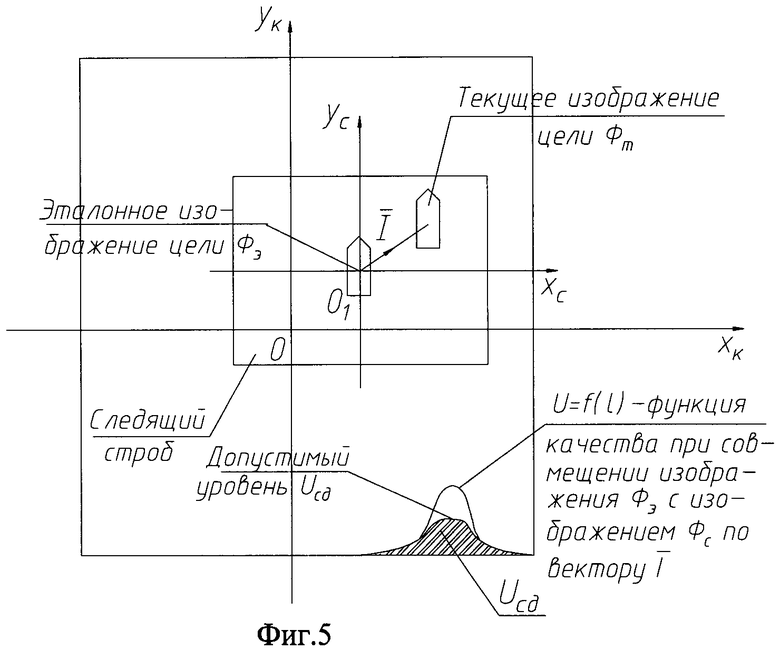
Измерение угловых координат цели корреляционными телевизионными системами производится на сравнении двух изображений (видеосигналов от них) одного и того же оптического сюжета: эталонного, полученного ранее и текущего, получаемого в процессе наведения ОЭСС.
Эталонное (заданное) изображение в виде видеосигнала характеризует требуемое положение наблюдаемой цели по отношению к полю зрения телевизионной камеры, а видеосигнал от текущего изображения характеризует истинное положение этой цели в поле зрения камеры.
Сравнение видеосигналов от эталонного и текущего изображений путем определения их взаимно корреляционной функции позволяет установить отклонение текущего положения цели от требуемого. При значительных отклонениях взаимно корреляционная функция характеризуется выражением (при достаточно большой площади кадра Q)


где l - расстояние на местности между двумя точками, в которых измеряются яркости (B1 и В2);
В - яркость.
При малых значениях этого отклонения заданное и текущее изображения практически совпадают, и нормированная взаимно корреляционная функция определяется выражением

В ОЭСС корреляционного типа информацией является относительное смещение текущего и эталонного изображений. Поэтому необходимо устранить влияние колебаний камеры на изображение цели путем стабилизации углового положения камеры.
К достоинствам ОЭСС корреляционного типа относится их способность обеспечить наведение на малоконтрастные хорошо замаскированные объекты. Недостатками их является их сложность.
Измерительная хк, ук и следящая хс, ус системы координат телевизионной системы сопровождения цели приведены на фиг.5.
Нормированная корреляционная функция изображения имеет вид

где W(B1, B2) - двумерная плотность вероятности яркости;
l - расстояние на местности между точками, в которых измеряются яркости B1 и В2.
При сопровождении визируемого объекта оптической (телевизионной) системой возможны два варианта начала работы:
1) наблюдаемая цель имеет определенную форму. Из запоминающего устройства выбирается соответствующий эталон изображения;
2) наблюдаемая цель находится на большом удалении и является точечной координатой.
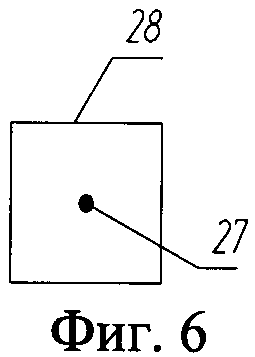
Эталон - самая малая рамка строба с точкой в качестве цели. Изображение цели и строба на экране ТА 12 приведены на фиг.6, где
27 - изображение объекта при большой дальности Д≥8 км;
28 - изображение строба.
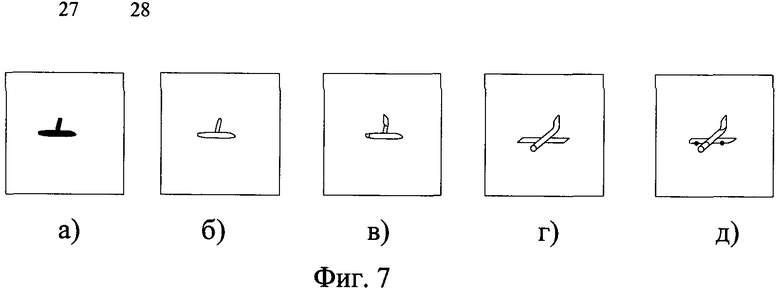
Рассмотрим работу для второго этапа работы. Изображение объекта и строба на экране телевизионного автомата при дальности Д менее 5 км приведены на фиг.7, причем фрагменты а), б), в), г), д), изображающие строб и цель, расположены с учетом приближения цели к пеленгатору так, что дальность от пеленгатора до цели на фрагменте а) больше дальности от пеленгатора до цели, чем на фрагменте б) и т.д., то есть Да>Дб>Дс>Дг>Дг.
В процессе сопровождения при приближении цели будет выявляться его конфигурация. Тогда автоматически будет осуществляться перезапись эталона. При увеличении размеров визируемой цели автоматически возрастет размер обрамляющей рамки строба. Наиболее сложную работу электронно-оптическая система выполняет при выборе и захвате на автосопровождение цели. Заложенные в память алгоритмы распознавания носят интеллектуальный характер.
Сигнал с выхода телевизионного автомата после преобразования во втором преобразователе координат 13 поступает на вход настраиваемого второго корректирующего фильтра БК2 14. Фильтр обеспечивает устойчивость и подавление резонансной частоты и помех в контуре точного отсчета оптической системы сопровождения и построен на базе (α,β)-фильтра с тем отличием, что коэффициенты фильтра являются функцией скорости и ускорения входной координаты.
Управляющим сигналом для расчета переменных коэффициентов к1 и к2 УПКУ1 20 и УПКУ2 26 настраиваемого корректирующего фильтра БК2 14 является резонансная частота фильтра, которая, в свою очередь, рассчитывается по ряду точек скоростного режима работы.
Методика формирования переменных коэффициентов к1 и к2 сводится к следующему. Назначаются крайние значения коэффициентов к1 и к2 настраиваемого корректирующего фильтра БК2 14, по которым определяются крайние резонансные частоты (α,β)-фильтра, соответствующие минимально-нулевой и максимальной скоростям входного воздействия arctg, которые для конкретного объекта управления обеспечивают в системе требуемое подавление помех на малых скоростях и допустимую ошибку слежения на высоких скоростях. Далее назначаются ряд пар коэффициентов к1 и к2 и соответствующие им резонансные частоты в назначенном интервале и определяются допустимые скорости входного воздействия arctg, например, по модели системы в пакете MatLab ([14] Ануфриев И.Е. Самоучитель MatLad 5.3/6.х - С-Пб.: БХВ-Петербург, 2003. - 736 с.: ил.). Для определенности назначим совместно с крайними резонансными частотами пять точек отсчета и получим точки функции ωpi=f(ωвxi), i=1, 2, …, 5. Назначим функцию связи f(ωвхi) в виде полинома. Если принять xi=ωвхi, yi=ωpi, то получаем систему уравнений для расчета коэффициентов полинома A0, A1, …, А4

Однако одной скорости входного воздействия arctg недостаточно для формирования переменных коэффициентов к1 и к2, поскольку требуется достижение точности слежения при гармонических маневрах объекта. Поэтому вторым входным аргументом для получения ωр будет являться угловое ускорение х=(ωвх+kε·fε(εвх)). Коэффициент кε и функция fε(εbx) подбираются из условия минимальной ошибки отработки гармонического воздействия на доминирующей частоте (ω=(0.8-1.2) с-1) в диапазонах малых (порядка 0.02-0.03 радиана) и больших (порядка 0.25-0.35 радиана) амплитуд.
Собственно коэффициенты к1 и к2 по полученной частоте ωр рассчитываются известным способом, приведенным ниже.
Передаточная функция (ПФ) (α,β)-фильтра имеет вид



где T - период дискретности системы, a=ξ/τ, 
откуда при ξ=0.7 получаем упрощенное значение а≈ωр.
Из (9) получаем: 
Таким образом, по (11) и (12) при известном Т, назначенной ξ=0.7 (например) и полученной ωр формируются переменные коэффициенты к1 и к2 настраиваемого фильтра (БК2) 14.
Для устойчивой работы телевизионного автомата ТА 12 в условиях эксплуатации координата строба φстр с одного из выходов вычислительного устройства ВУ 17 подается в устройство обработки видеосигнала оптического пеленгатора 2, в котором происходит сравнение задающей координаты строба и текущей координаты строба с выхода вычислительного устройства ВУ 17. После сравнения текущей и задающей координаты строба из сигнала управления исключаются импульсные (кратковременные) сигналы помех, значительно превышающие по уровню сигналы управления, поступающие на входы телевизионного автомата и видеоконтрольного устройства. Такая логика формирования управляющего воздействия на ТА 12 позволяет исключить пропадание цели на экране ВКУ и соответственно уменьшает вероятность срыва автосопровождения цели, обусловленное появлением случайных помех в сигнале управления точного канала оптической системы управления.
Таким образом, в предлагаемой системе сопровождения подвижных объектов обеспечивается плавное без скачков и колебаний переключение структур за счет использования единого блока коррекции БК1 10 и устройства наведения и стабилизации УНС 7. Повышается устойчивость сопровождения объекта за счет обеспечения возможности перехода сопровождения с локационного режима в оптический и обратно. Повышается надежность работы системы сопровождения, так как из оптической системы исключается блок коррекции. Локационный и грубый контур оптической системы имеют одинаковые динамические характеристики, что упрощает настройку и отладку систем в процессе эксплуатации. Сдача и отладка систем проводится по одинаковой методике с единым контрольно-измерительным оборудованием. Кроме того, обеспечено дополнительное увеличение точности работы оптической системы сопровождения введением точного контура слежения с использование телевизионного автомата.
Источники информации
1. Барсуков Ф.И., Величкин А.И., Сухарев А.Д. Телевизионные системы летательных аппаратов. - М., Советское радио, 1979. - 256 с., аналог.
2. Грязин Г.Н. Оптико-электронные системы для обзора пространства: Системы телевидения. - Л.: Машиностроение, Ленинградское отд., 1988. - 224 с.
3. Цибулевский И.Е. Человек как звено следящей системы. - М., Наука, 1981. - 288 с., аналог.
4. Динамика следящих приводов. / Под ред. Л.В.Рабиновича.- М.: Машиностроение, 1982. - 496 с., стр.132, рис.2.26, аналог.
5. Радиолокационные устройства. / Под ред. В.В.Григорина-Рябова. - М.: Советское радио, 1970. - 680 с., стр.570, рис 21.12, аналог.
6. Патент РФ на изобретение №2321020, МПК G01S 13/66, 2008 г., прототип.
7. Максимов М.В., Горгонов Г.И. Радиоэлектронные системы самонаведения. - М., Радио и связь, 1982. - 304 с.
8. Тетельбаум И.И., Шнейдер Ю.Р. 400 схем для АВМ. - М., Энергия, 1978. - 246 с., ил.
9. Павлов В.В. Управляющие устройства логического типа. - М., Энергия, 1968.
10. Ривкин С.С. Стабилизация измерительных устройств на качающемся основании. - М., Наука, 1978. - 320 с., ил.
11. Чиликин М.Г., Сандлер А.С. Общий курс электропривода. - М., Энергоиздат, 1981. - 576 с.
12. Бессекерский В.А., Попов Е.П. Теория систем автоматического регулирования. - М., Наука, 1973. - 768 с.
13. Герман-Галкин С.Г. Компьютерное моделирование полупроводниковых систем в MATLAB 6.0: Учебное пособие. - С-Пб.: КОРОНА принт, 2001. - 320 с.
14. Ануфриев И.Е. Самоучитель MatLad 5.3/6.х - С-Пб.: БХВ-Петербург, 2003. - 736 с., ил.
15. Чернов В.Г. Устройства ввода вывода аналоговой информации для цифровых систем сбора и обработки данных. - М., Машиностроение, 1988. - 184 с.
16. Руководство пользователя по сигнальным микропроцессорам семейства ADSP 2100. / Пер. с англ. О.В.Луневой; под ред. А.Д.Викторова, С-Пб. Гос. ун-т. - С-Пб., 1997. - 520 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМБИНИРОВАННАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2389041C2 |
| ИНТЕГРИРОВАННАЯ НАБЛЮДАТЕЛЬНАЯ СИСТЕМА СОПРОВОЖДЕНИЯ | 2007 |
|
RU2327188C1 |
| СЛЕДЯЩАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2381524C1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ | 2007 |
|
RU2364886C1 |
| СЛЕДЯЩАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2325671C1 |
| ИНТЕГРИРОВАННАЯ АВТОМАТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ | 2012 |
|
RU2498345C1 |
| ИНТЕГРИРОВАННАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ АВТОМАТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2321020C1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ | 2000 |
|
RU2197002C2 |
| СЛЕДЯЩАЯ СИСТЕМА | 2003 |
|
RU2252435C2 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА СОПРОВОЖДЕНИЯ | 2000 |
|
RU2191407C2 |
Система сопровождения подвижных объектов в пространстве преимущественно с качающегося основания может быть использована для управления воздушным движением. Достигаемый технический результат изобретения заключается в повышении точности и устойчивости сопровождения автоматической системой подвижных объектов в установившемся и переходном режимах за счет исключения скачков по положению и по скорости при переключении структур системы сопровождения с локационной в оптическую и обратно. Указанный результат достигается за счет того, что система сопровождения содержит функционально связанные между собой локационный и оптико-электронный пеленгаторы, формирователь логики режимов, два коммутатора, два преобразователя координат из нестабилизированной системы координат в стабилизированную, устройство наведения и стабилизации, при этом локационный и оптико-электронный пеленгаторы механически соединены между собой и имеют кинематическую связь с выходным валом устройства наведения и стабилизации, содержит также два блока коррекции, первый сумматор, телевизионный автомат и масштабный усилитель, определенным образом соединенные между собой. 2 з.п. ф-лы, 7 ил.
1. Система сопровождения подвижных объектов, содержащая локационный и оптико-электронный пеленгаторы, первые выходы которых соединены соответственно с первым и вторым входами формирователя логики режимов, предназначенного для обеспечения перехода сопровождения подвижных объектов с локационного режима в оптический, и обратно, первый и второй коммутаторы, управляющие входы которых соединены соответственно с первым и вторым выходами формирователя логики режимов, первый преобразователь координат из нестабилизированной системы координат в стабилизированную, устройство наведения и стабилизации, включающее последовательно соединенные преобразователь стабилизированных координат в нестабилизированные и привод наведения и стабилизации, при этом локационный и оптико-электронный пеленгаторы механически соединены друг с другом и кинематически связаны с выходом устройства наведения и стабилизации, отличающаяся тем, что в нее дополнительно введены последовательно соединенные первый блок коррекции и первый сумматор, последовательно соединенные телевизионный автомат, второй преобразователь нестабилизированных координат в стабилизированные и второй блок коррекции, а также масштабный усилитель, выход которого соединен с первым входом первого коммутатора, при этом второй выход оптико-электронного пеленгатора соединен с входом масштабного усилителя и входом телевизионного автомата, второй выход которого соединен с входом оптико-электронного пеленгатора, второй выход локационного пеленгатора подключен ко второму входу первого коммутатора, выход которого соединен с входом первого преобразователя нестабилизированных координат в стабилизированные, выходом соединенного с входом первого блока коррекции, вход второго коммутатора соединен с выходом второго блока коррекции, а выход - с вторым входом первого сумматора, выход которого подключен к входу устройства наведения и стабилизации.
2. Система по п.1, отличающаяся тем, что телевизионный автомат содержит последовательно соединенные задающее устройство, вычислительное устройство и электронное исполнительное устройство, выход которого соединен со вторым входом задающего устройства, причем входом телевизионного автомата является первый вход задающего устройства, а первым и вторым выходами - соответственно выход электронного исполнительного устройства и второй выход вычислительного устройства.
3. Система по п.1, отличающаяся тем, что второй блок коррекции содержит последовательно соединенные блок сравнения, первый усилитель с переменным коэффициентом усиления, первый интегратор, второй сумматор, второй интегратор, третий сумматор и оператор дискретного преобразования, а также второй усилитель с переменным коэффициентом усиления, вход которого подключен к выходу блока сравнения, а выход - ко второму входу второго сумматора, выход первого интегратора соединен со вторым входом третьего сумматора, а выход оператора дискретного преобразования - со вторым входом блока сравнения, причем входом второго блока коррекции является первый вход блока сравнения, а выходом - выход второго интегратора.
| ИНТЕГРИРОВАННАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ АВТОМАТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2321020C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТА И ОПТИКО-ЭЛЕКТРОННОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2251712C1 |
| RU 93021672 A, 27.09.1995 | |||
| СЛЕДЯЩАЯ ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА | 2003 |
|
RU2248009C2 |
| СПОСОБ УПРАВЛЕНИЯ РИСОВАРКОЙ, РАБОТАЮЩЕЙ ПОД ДАВЛЕНИЕМ, И РИСОВАРКА, РАБОТАЮЩАЯ ПОД ДАВЛЕНИЕМ, ДЛЯ ОСУЩЕСТВЛЕНИЯ ТАКОГО СПОСОБА | 2013 |
|
RU2659882C2 |
| KR 100770431 B1, 26.10.2007 | |||
| Контрольно-сортировочный автоматический прибор для листовых материалов | 1947 |
|
SU75679A1 |
| WO 2007127291 A2, 08.11.2007. | |||

