Изобретение относится к самолетам, выполненным по аэродинамической схеме «летающее крыло» и может быть использовано при создании беспилотных и пилотируемых летательных аппаратов, предназначенных для решения широкого круга задач: гражданских (перевозка грузов, пассажиров) и военных (разведывательных, ударных, требующих обеспечения малозаметности), сочетающих удовлетворительные летно-технические характеристики на дозвуковых и сверхзвуковых скоростях.
Известное техническое противоречие между требованиями к дозвуковому и сверхзвуковому режимам полета летательных аппаратов, выполненных по аэродинамической схеме «летающее крыло», конструктивно решается следующим образом.
Известен летательный аппарат, содержащий крыло-фюзеляж, реактивные двигатели, вертикальное и горизонтальное оперение [1]. Техническим результатом, на достижение которого направлено указанное техническое решение, является повышение взлетно-посадочных характеристик. Технический результат достигается посредством разворота в полете крыла-фюзеляжа на 90° в направлении взлета (посадки) за счет того, что двигатели и оперение установлены с возможностью вращения в горизонтальной плоскости, а крыло-фюзеляж выполнено таким образом, что при любом направлении движения сечение его вертикальной плоскостью, параллельной направлению движения, дает профиль, создающий подъемную силу.
Недостатками известного решения является малая эффективность горизонтального и вертикального оперения, обуславливающая неудовлетворительные характеристики устойчивости и управляемости на всех режимах полета, и наличие конструктивных элементов в виде мотогондол для размещения двигателей и оперения, уменьшающих аэродинамическое качество за счет сопротивления и увеличивающих эффективную поверхность рассеяния, т.е. повышающих радиолокационную заметность.
Наиболее близким к предлагаемому техническому решению по совпадающим признакам является «Сверхзвуковое летающее крыло» [2], представляющее из себя крыло, создающее подъемную силу при любом направлении полета. При этом для движения на малых скоростях крыло выполнено с большим удлинением, малым углом стреловидности и соответствующим профилем. В поперечном направлении, по оси, перпендикулярной оси направления полета на малых скоростях, крыло выполнено с малым удлинением, большим углом стреловидности и, соответственно, с более тонким профилем для полета на сверхзвуковых скоростях.
Указанная концепция, идея которой заключается в том, что весь летательный аппарат при переходе от дозвукового полета к сверхзвуковому и обратно разворачивается на 90 градусов, получила в технической и патентной литературе устойчивое название «сверхзвуковое двунаправленное летающее крыло» (Supersonic Bi-directional Flying Wing), что в последующем описании изобретения допускает возможность использования данного термина.
Для обеспечения разворота двунаправленного крыла прототипа при переходе от одного режима полета (дозвукового) к другому (сверхзвуковому) и обратно, крыло оснащено поворотной платформой, на которой закреплена силовая установка. Управление и стабилизацию на всех режимах полета по крену, тангажу и рысканию обеспечивает механизация крыла аэродинамическими поверхностями. Стабилизация полета на малых скоростях дополнительно обеспечивается установленными шарнирно на концах крыла с большим удлинением отклоняемыми законцовками, которые на малых скоростях занимают вертикальное положение, а при повороте крыла в режим сверхзвукового полета перемещаются в горизонтальное положение, трансформируясь в продолжение крыла с большим удлинением. Описанием к патенту предусмотрена возможность установки на поворотную платформу вместе с силовой установкой вертикальных стабилизаторов, предназначенных для управления и стабилизации полета по курсу на всех режимах полета. Так же описанием к патенту предусмотрена возможность установки на крыле-фюзеляже более одной поворотной платформы с одним или несколькими двигателями и одним или несколькими вертикальными стабилизаторами. Поворотные платформы с двигателями и стабилизаторами могут быть установлены сверху крыла-фюзеляжа, снизу, или сверху и снизу, а также с возможностью перемещения по поверхности крыла.
Прототипу присущи недостатки аналога, а именно наличие мотогондол и управляющих поверхностей в виде стабилизаторов, ухудшающих аэродинамическое качество и увеличивающих поверхность рассеяния.
Технический результат достигается тем, что в летательном аппарате, выполненном по аэродинамической схеме «двунаправленное летающее крыло», содержащем воздухозаборное устройство, расположенную в крыле силовую установку, систему управления вектором тяги, системы управления и стабилизации полета, воздухозаборное устройство установлено с возможностью поворота относительно продольной оси крыла в плоскости строительной горизонтали летательного аппарата на угол α в диапазоне от 0° до 90°, а система управления вектором тяги выполнена с возможностью изменения направления вектора тяги в плоскости строительной горизонтали на угол β=α в направлении, противоположенном направлению поворота воздухозаборного устройства.
Сущность изобретения заключается в том, что летательный аппарат, выполненный по схеме «двунаправленное летающее крыло», оснащен поворотным воздухозаборным устройством и системой изменения направления вектора тяги двигателей в плоскости строительной горизонтали летательного аппарата и поясняется чертежами, где
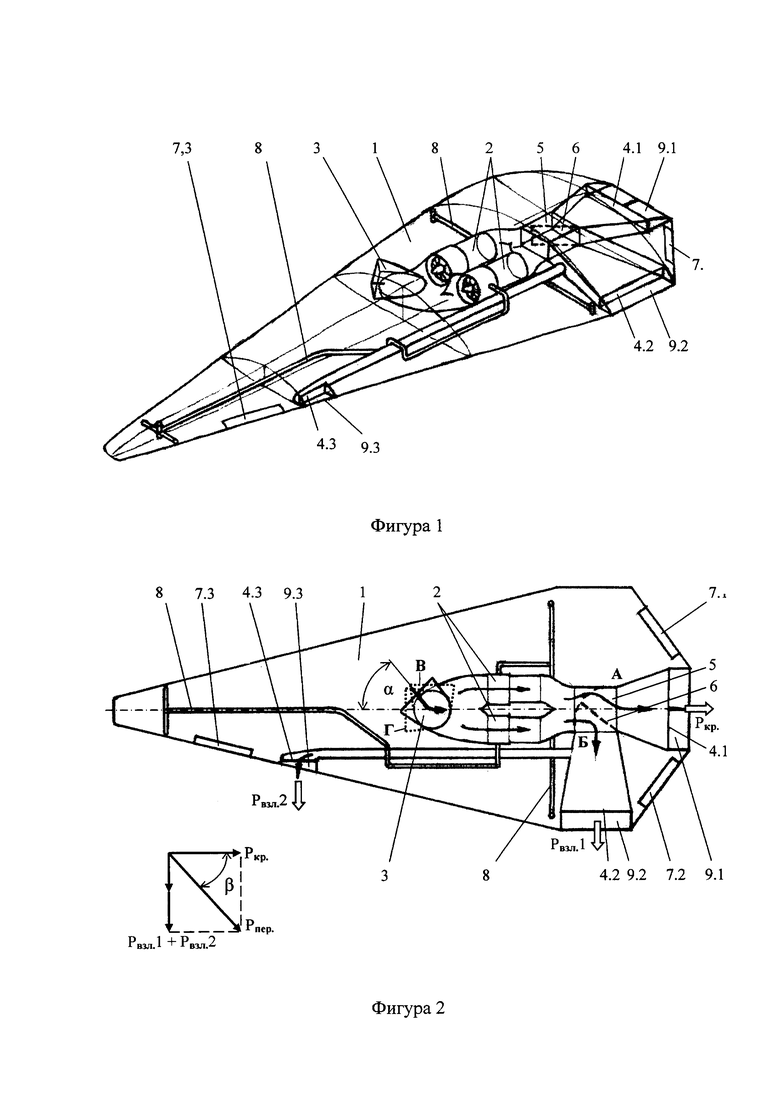
на фиг. 1 представлена схема летательного аппарата в варианте силовой установки с двумя двигателями;
на фиг. 2 - схема летательного аппарата в плоскости строительной горизонтали;
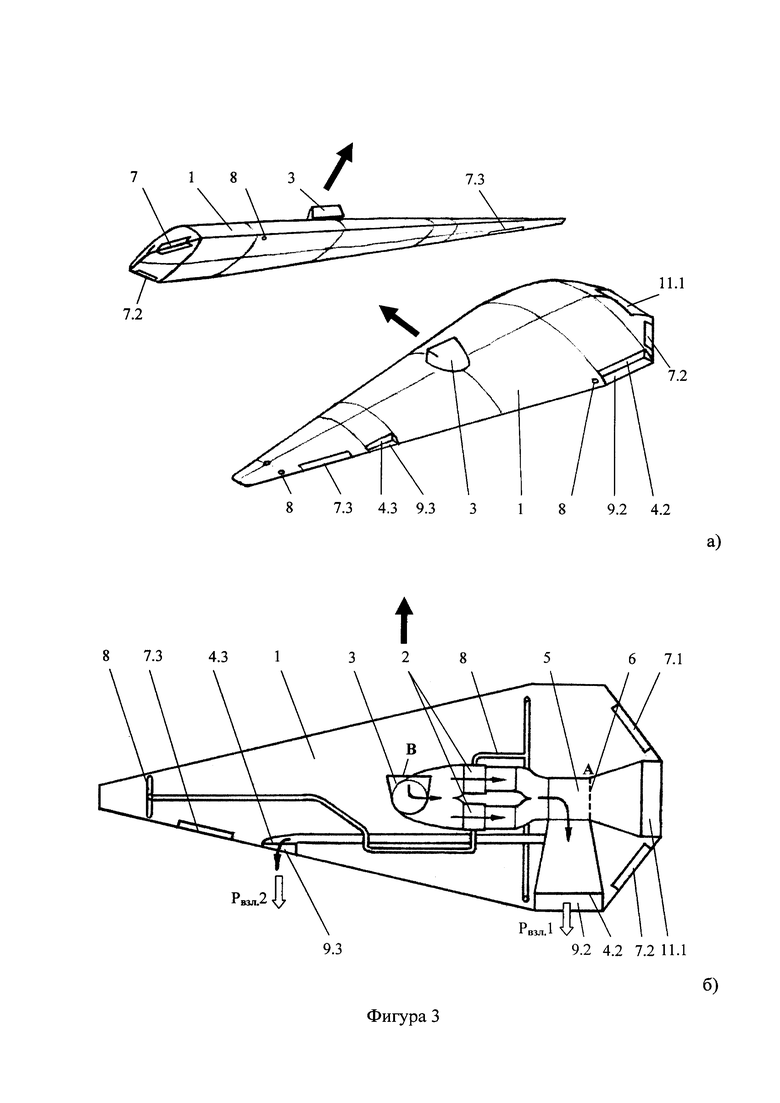
на фиг. 3а - общие виды летательного аппарата при полете в диапазоне малых скоростей (в режиме взлета - посадки);
на фиг. 3б - схема летательного аппарата в плоскости строительной горизонтали при полете в диапазоне малых скоростей;
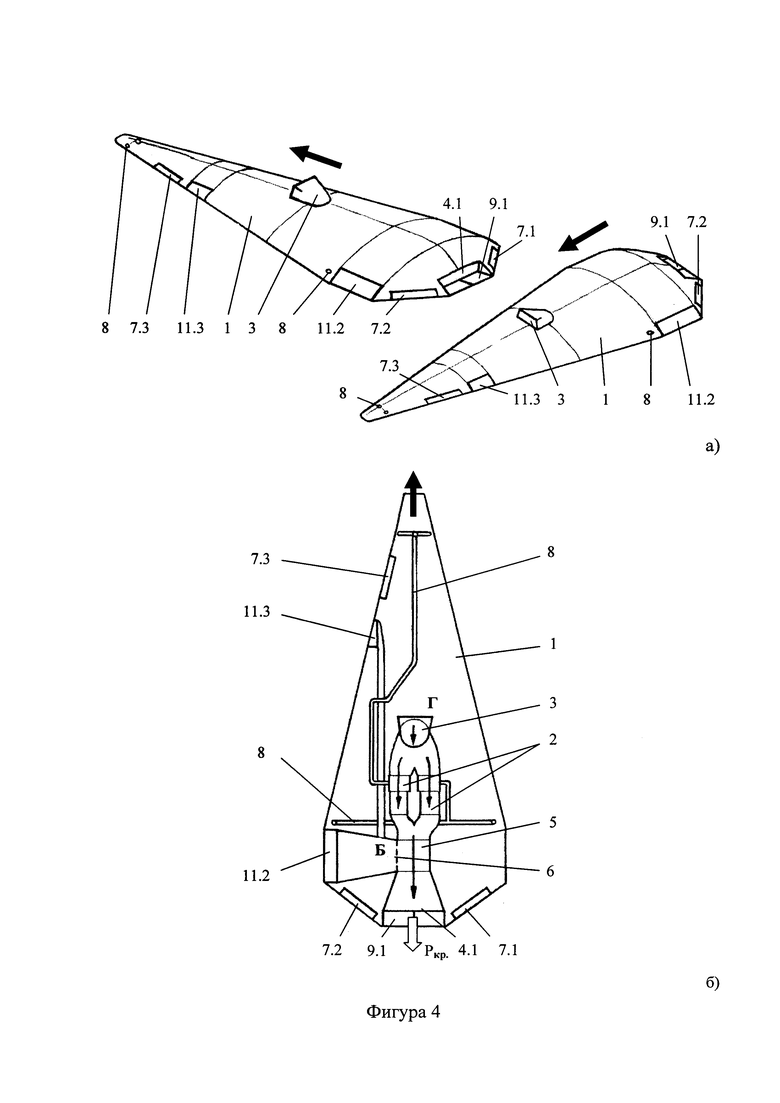
на фиг. 4а - общие виды летательного аппарата в диапазоне сверхзвуковых скоростей;
на фиг. 4б - схема летательного аппарата в плоскости строительной горизонтали при полете в диапазоне сверхзвуковых скоростей;
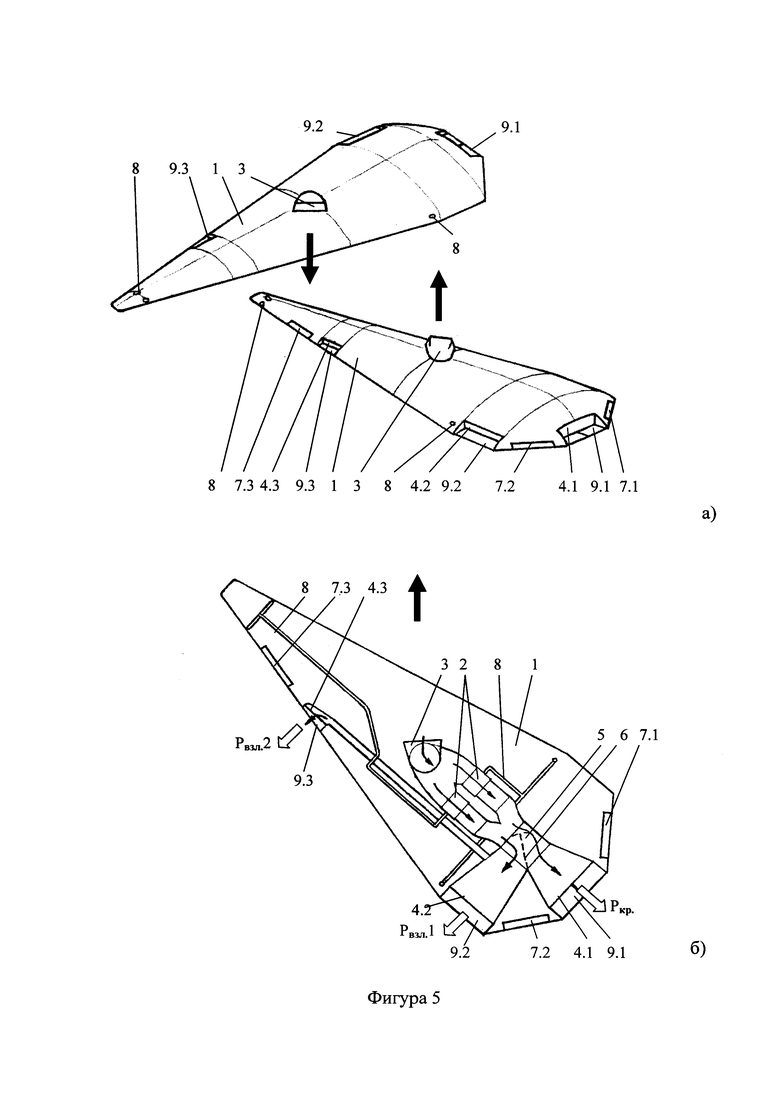
на фиг. 5а - общие виды летательного аппарата при переходном режиме движения (от дозвуковых скоростей к сверхзвуковым и обратно);
на фиг. 5б - схема летательного аппарата в плане при переходном режиме движения;
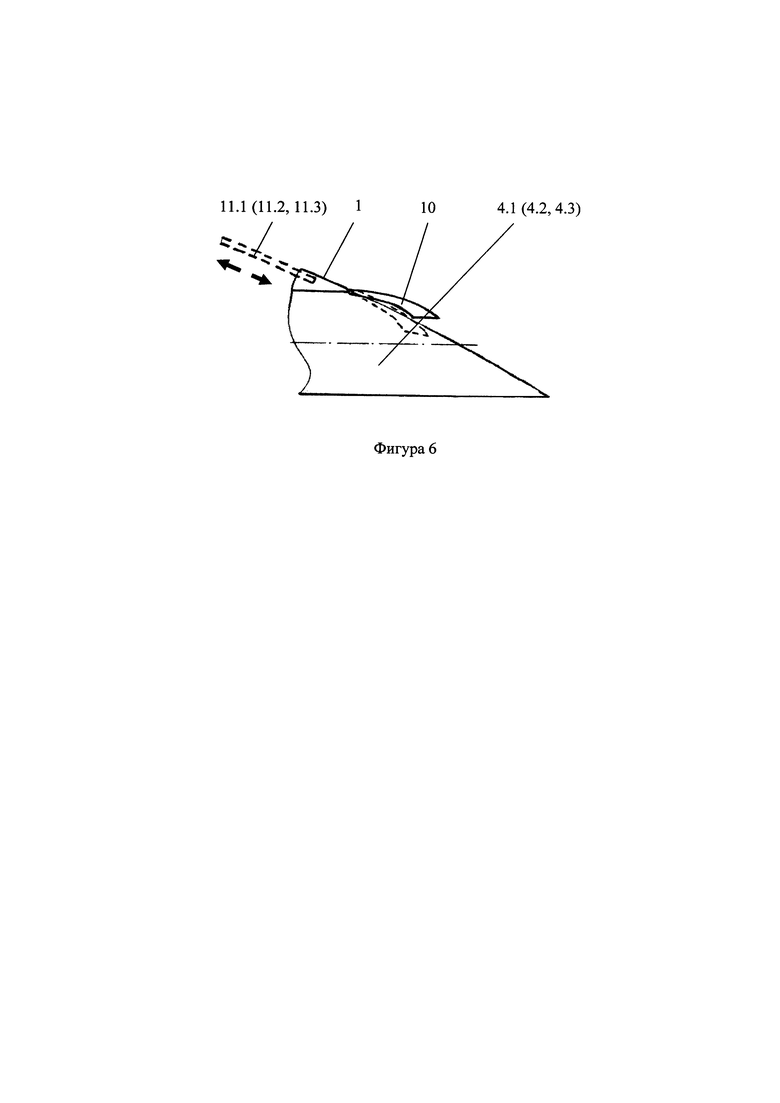
на фиг. 6 представлен вариант технического решения устройства газодинамического управления летательным аппаратом. На чертежах обозначено:
1. Двунаправленное крыло летательного аппарата;
2. Двигатели силовой установки летательного аппарата;
3. Воздухозаборное устройство;
4. Реактивные сопла;
5. Система управления вектором тяги силовой установки;
6. Поворотная заслонка системы управления вектором тяги;
7. Аэродинамические поверхности управления и стабилизации полета;
8. Система струйного управления и стабилизации полета;
9. Система газодинамического управления;
10. Регулируемая створка системы газодинамического управления;
11. Выдвижные створки.
Сплошными жирными стрелками обозначено направление движения летательного аппарата; сплошными тонкими стрелками - направление движения воздуха и выхлопных газов в газовых трактах воздухозаборного устройства 3, двигателей 2, системы управления вектором тяги 5; штриховой тонкой стрелкой - направление перемещения выдвижных створок 11; фигурными стрелками - направление тяги от реактивных сопел 4.
Летательный аппарат содержит:
- двунаправленное летающее крыло 1, являющееся одновременно фюзеляжем летательного аппарата;
- расположенную в крыле силовую установку, состоящую из одного или более реактивных двигателей 2;
- воздухозаборное устройство 3, установленное с возможностью поворота относительно продольной оси в плоскости строительной горизонтали летательного аппарата на угол α в диапазоне от 0° до 90°. Воздухозаборное устройство может быть оснащено необходимыми средствами механизации для изменения расхода воздуха при разных режимах полета (на чертежах не показано);
- систему управления вектором тяги 5 с поворотной заслонкой 6, выполненную с возможностью изменения направления вектора тяги двигателей 2 в плоскости строительной горизонтали летательного аппарата на угол β=α в направлении, противоположенном повороту воздухозаборного устройства 3. Система управления вектором тяги включает в себя также реактивное сопло 4.1 и расположенные перпендикулярно ему в плоскости строительной горизонтали летательного аппарата и параллельно друг другу реактивные сопла 4.2 и 4.3. При этом газы для организации тяги через сопло 4.3 могут отбираться как показано на чертежах из газового тракта сопла 4.2, или из системы 5 управления вектором тяги, или непосредственно за камерами сгорания или от компрессоров двигателей 2. Величина тяги Рвзл.2 регулируется изменением расхода рабочего тела, обеспечиваемого изменением площади сечения газового тракта реактивного сопла 4.3;
- систему аэродинамического управления и стабилизации летательного аппарата, включающую механизацию крыла в виде управляющих аэродинамических поверхностей 7.1, 7.2, 7.3 по задним для каждого взаимоперпендикулярного направления полета кромкам крыла 1;
- систему струйного управления и стабилизации полета 8 посредством струйных рулей (на чертежах выделенными позициями не обозначены). Воздух или газ для струйных рулей может отбираться от компрессоров или за турбинами двигателей 2, или от специальных газогенераторов (на чертежах не показаны). Стабилизирующие и управляющие моменты создаются путем дифференциального изменения площадей сечений реактивных сопел струйных рулей, обеспечивающего соответствующее изменение расхода рабочего тела;
- систему газодинамического управления 9,1, 9.2, 9.3, включающую регулируемые створки 10;
- выдвижные створки 11,1, 11.2, 11.3, выполненные без нарушения геометрической целостности аэродинамических обводов крыла 1 в выдвинутом положении.
Летательный аппарат работает следующим образом.
Взлет, посадка, движение на дозвуковых скоростях (фиг. 3а, 3б) осуществляется при конфигурации двунаправленного крыла 1 летательного аппарата, когда воздухозаборное устройство 3 находится в положении «В», а поворотная заслонка 6 системы управления вектором тяги 5 в положении «А». Тяга РВзл.1+Рвзл.2 обеспечивается через реактивные сопла 4.2 и 4.3. Ниша незадействованного в создании тяги сопла 4.1 закрыта выдвижной створкой 11.1. При этом двунаправленное крыло 1 имеет максимальное удлинение, минимальную стреловидность и максимальную относительную толщину профиля, то есть максимальную подъемную силу.
Крейсерский полет на сверхзвуковых скоростях осуществляется в конфигурации крыла 1 (фиг. 4а, 4б), когда воздухозаборное устройство 3 находится в положении «Г», а поворотная заслонка 6 в положении «Б». Тяга Ркр. обеспечивается через реактивное сопло 4.1. Ниша незадействованных в создании тяги сопел 4.2 и 4.3 закрыты выдвижными створкам 11.2 и 11.3. При этом двунаправленное крыло 1 имеет минимальное удлинение, максимальную стреловидность и минимальную относительную толщину профиля, то есть минимальное лобовое сопротивление.
В переходном режиме движения (от дозвуковых скоростей к сверхзвуковым) воздухозаборное устройство 3 двунаправленного крыла 1 поворачивается в плоскости строительной горизонтали летательного аппарата относительно его продольной оси из положения «В» в положение «Г» (фиг. 1, 2, 5а, 5б). Одновременно поворотная заслонка 6 системы управления вектором тяги 5 поворачивается из положения «А» в положение «Б». Согласование поворота воздухозаборного устройства 3 и поворотной заслонки 6 осуществляется в автоматическом режиме и обеспечивается бортовыми компьютерами (на чертежах не показано). Это позволяет создать суммарную составляющую векторов тяги (Ркр., Рвзл.1 и Рвзл.2 от реактивных сопел 4.1, 4.2 и 4.3) Рпер., направленную противоположено направлению воздухозаборного устройства 3 и отклоненную в каждый момент переходного режима движения от продольной оси летательного аппарата на угол β, равный угу а поворота воздухозаборного устройства 3, что обеспечивает движение летательного аппарата в переходном режиме полета. При переходе от сверхзвуковых скоростей к дозвуковым воздухозаборное устройство 3 поворачивается из положения «Г» в положение «В» и поворотная заслонка 8 соответственно - из положения «Б» в положение «А».
Управление и стабилизация полета на разных режимах полета осуществляется согласованно системами аэродинамического управления 7.1, 7.2, и 7.3, газодинамического управления 9.1, 9.2 и 9.3 и струйного управления 8.
Поворотное в плоскости строительной горизонтали заявляемого летательного аппарата воздухозаборное устройство 3 функционально является обратным аналогом выходных устройств двигателей самолетов вертикального взлета и посадки и конструктивно может быть выполнено, например, аналогично поворотным в вертикальной плоскости соплам турбовентиляторного двигателя Rolls Royce Pegasus, устанавливаемого на всех модификациях самолета Harrier [3]. То есть конструкция поворотного воздухозаборного устройства 3 реализуется посредством общеизвестных технических средств. Средства механизации воздухозаборных устройств (изменения внутренней геометрии в зависимости от условий полета) для изменения расхода воздуха так же общеизвестны [4] и применяются в ряде конструкций известных самолетов (например Boeing Х-32 Direct-Lift Break, США).
Система изменения направления вектора тяги 5 двигателей 2 в плоскости строительной горизонтали летательного аппарата может быть выполнена аналогично известным устройствам для изменения направления тяги в вертикальной плоскости в конструкциях двигателей летательных аппаратов вертикального взлета-посадки [5] и используемых в конструкциях экспериментальных и серийных самолетов, таких как Як-38, Як-141, Hawker Siddeley Harrier, Harrier AV-8A, SLockheed Martin F-35 Lightning II [6]. Устройство изменения направления тяги с использованием поворотной заслонки 6, аналогичное представленному на чертежах предлагаемого изобретения, реализовано для перераспределения струи выхлопных газов между параллельно установленными выхлопными патрубками силовой установки летательного аппарата [7]. Таким образом, система изменения направления вектора тяги заявляемого летательного аппарата в плоскости строительной горизонтали реализуется использованием общеизвестных технических средств.
Газодинамическое управление траекторией движения летательного аппарата осуществляется отклонением реактивной струи, например, с помощью газовых рулей - поворотных пластин, установленных на выходе из сопла. Представленное на фиг. 6 решение является одной из известных схем управлением вектором тяги с плоским соплом, его особенность состоит в том, что отклонение струи происходит одной регулируемой створкой 10, к которой струя прилипает за счет «эффекта Коанда» [8]. Подобные устройства хорошо исследованы, в том числе отечественными [9] и зарубежными [10] специалистами, реализованы в проектах перспективных самолетов (МиГ-ХХ, Су-Т6ВМ), отработаны на экспериментальных (Су-27ПС) и серийных (F-22 Raptor, Lockheed F-117 Night Hawk) самодлетов [11]. Таким образом, принципиальная возможность газодинамического управления и стабилизации полета заявляемого летательного аппарата обеспечены общеизвестными техническими средствами.
Возможность стабилизации и управления полетом летательного аппарата по курсу, тангажу и крену посредством использования системы струйного управления 8 так же обеспечивается общеизвестными техническими решениями [12], реализованными на экспериментальных (Як-141, North American Х-15) и серийных (Як-38, Harrier AV-8A) самолетах.
Возможность стабилизации и управления полетом летательного аппарата аэродинамическими методами с использованием управляющих аэродинамических поверхностей 7.1, 7.2, 7.3 - элеронов, элевонов, интерцепторов, закрылков, спойлеров и пр. [13], в том числе без использования вертикальных стабилизаторов (экспериментальные самолеты Boeing Х-36, серийные изделия Northrop В-2 Spirit) так же обеспечена общеизвестными техническими средствами.
Двунаправленное крыло-фюзеляж может быть выполнено асимметричным, как представлено на чертежах предлагаемого изобретения, так и симметричным - аналогично техническим решениям аналога и прототипа. Вопросы управления и стабилизации ассиметричными самолетами решены и реализованы в летающих конструкциях, например таких, как Supermarine S.6A (Великобритания, 1929 г.) [14]; Blohm & Voss BV 141 (Германия, 1938 г. ) [15]; Rutan Model 202 Boomerang (США, 1996 г.) [16].
Следует отметить, что любой неоднодвигательный самолет в режиме аварийного полета или посадки с одним или несколькими неработающими двигателями является асимметричным и поддерживает удовлетворительную управляемость, достаточную для достижения посадочной полосы и совершения посадки.
Вопросы управляемости самолета с несимметрично расположенным по отношению к направлению полета крылом и в режиме перехода крыла из симметричного положения в несимметричное реализованы в летающей модели беспилотного летательного аппарата Oblique Wing Research Aircraft (OWRA RPW, США, 1970 г. ), в экспериментальном пилотируемом самолете Ames Dryden-1 (AD-1, США, 1982 г., реализация технического решения по пат. США №3971535 [17]) [18].
Таким образом, управляемость и стабилизация полета предложенного летательного аппарата обеспечены общеизвестными техническими средствами и могут быть реализованы как каждым по отдельности, так и комплексом представленных средств. Современные цифровые системы согласования действия устройств управления и стабилизации также общеизвестны и осуществлены в приведенных выше конструкциях самолетов.
Совокупность отличительных признаков предлагаемого изобретения (установка воздухозаборного устройства и системы управления вектором тяги с возможностью согласованного поворота воздухозаборного устройства и изменения направления вектора тяги относительно продольной оси в плоскости строительной горизонтали летательного аппарата) обеспечивает возможность исключения из конструкции летательного аппарата, выполненного по аэродинамической схеме «двунаправленное летающее крыло» конструктивных элементов, не участвующих в создании подъемной силы и увеличивающих эффективную поверхность рассеяния.
Таким образом, использование предлагаемого технического решения обеспечивает улучшение аэродинамического качества «двунаправленного летающего крыла» на дозвуковых и сверхзвуковых режимах полета и уменьшение радиолокационной заметности.
Источники информации
1. Летательный аппарат. Заявка на выдачу авторского свидетельства СССР №2787386/23 (087629) от 14.06.1979 г., М. Кл.3 В64С 3/40.
2. Сверхзвуковое летающее крыло. Патент США 20120037751 А1, 2012 г.
3. Rolls Royce Pegasus. Авиационная энциклопедия «Уголок неба». URL: http://airwar.ru/enc/engines/pegasus.html. Дата обращения 01.06.2018.
4. Кравченко И.В., Христофоров И.Л. Силовые установки летательных аппаратов. Издательство МАИ, 2003.
5. В.Ф. Павленко. Силовые установки летательных аппаратов вертикального взлета и посадки. М.: Машиностроение, 1972.
6. Перехватчик с вертикальным взлетом Як-141. Армии и Солдаты. Военная энциклопедия / Авиация / Военная авиация в период с 1961 по 1990 г. URL: http://armedman.ru/samoletyi/1961-1990-samoletyi/perehvatchik-s-vertikalnyim-vzletom-yak-141.html. Дата обращения 30.05.2018.
7. Выходное устройство авиационного двигателя и группы авиационных двигателей силовой установки (варианты). Патент РФ №2641341 МПК B64D 33/04, F02K 1/11, Опубликовано: 17.01.2018. Бюл. №2).
8. П. Булат. На пути к пятому и шестому поколению. Часть V. Пламенный мотор для 5-го поколения. URL: http://otvaga2004.ru/kaleydoskop/kaleydoskop-air/5-6-pokoleniye-5/. Дата обращения 15.05.2018.
9. В.Т. Калугин. Аэрогазодинамика органов управления полетом летательных аппаратов. Издательство МГТУ им. Н.Э. Баумана. С 688, 2004.
10. Sedwick Т.A. Investigation of Non-Symmetric Two-Dimensional Nozzle Installed in Twin-Engine Tactical AircraftV/AIAA Paper №75-1319.1975.
11. Реактивное сопло в авиации. URL: http://avia-simply.ru/reaktivnoe-soplo-v-aviacii/. Дата обращения 02.05.2018.
12. Проектирование самолета. URL: http://www.taginvest.ru/ samolet/50.pl. Дата обращения 08.05.2018.
13. Г.И. Житомирский. Конструкция самолетов. М.: Машиностроение, 416 с. 1995.
14. В.А. Бакурский. Самые быстрые самолеты или гонка за призраком скорости. Москва, ИЛБИ, 218 с. 2000.
15. На кривой кобыле: асимметричный самолет.URL: https://www. popmech.ru/weapon/10528-na-krivoy-kobyle-asimmetrichnyy-samolet/. Дата обращения 17.05.2018.
16. Burt Rutan 202 Boomerang. URL: https://gunm.ru/burt-rutan-202-boomerang/. Дата обращения 30.05.2018.
17. Сверхзвуковой самолет с наклонным крылом. Патент США 3971535 А, 1976.
18. Самолеты с поворотным крылом. URL: https://www.popmech.ru/ weapon/15340-s-krylom-napereves/. Дата обращения 17.05.2018.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ (ЛАВВП), ГИБРИДНАЯ ЭЛЕКТРОСИЛОВАЯ УСТАНОВКА (ГЭУ) ДЛЯ ЛАВВП И СПОСОБ ФУНКЦИОНИРОВАНИЯ ЛАВВП С ГЭУ (ВАРИАНТЫ) | 2019 |
|
RU2715823C1 |
| ДИСКОЛЁТ КРИШТОПА (ДЛК), ГИБРИДНАЯ СИЛОВАЯ УСТАНОВКА (ГСУ) ДЛЯ ДЛК И СПОСОБ ФУНКЦИОНИРОВАНИЯ ДЛК С ГСУ (ВАРИАНТЫ) | 2019 |
|
RU2714553C1 |
| Летательный аппарат короткого взлета и посадки с газодинамическим управлением | 2018 |
|
RU2711760C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2014 |
|
RU2577824C1 |
| ГИПЕРЗВУКОВОЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2012 |
|
RU2509035C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ (ВАРИАНТЫ) | 2012 |
|
RU2486105C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ТИПА ЛЕТАЮЩЕЕ КРЫЛО | 2019 |
|
RU2744692C2 |
| САМОЛЕТ ИНТЕГРАЛЬНОЙ АЭРОДИНАМИЧЕСКОЙ КОМПОНОВКИ | 2010 |
|
RU2440916C1 |
| Малоразмерный беспилотный летательный аппарат | 2023 |
|
RU2812634C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ДВУХМЕСТНЫЙ МАЛОЗАМЕТНЫЙ САМОЛЕТ | 2023 |
|
RU2807624C1 |
Изобретение относится к самолетам, выполненным по аэродинамической схеме «летающее крыло». Летательный аппарат содержит воздухозаборное устройство, расположенную в крыле силовую установку, систему управления вектором тяги реактивных двигателей силовой установки, системы управления и стабилизации полета. Воздухозаборное устройство установлено с возможностью поворота относительно продольной оси крыла в плоскости его строительной горизонтали на угол α в диапазоне от 0° до 90°. Система управления выполнена с возможностью изменения направления вектора тяги в плоскости строительной горизонтали на угол β=α в направлении, противоположном направлению поворота воздухозаборного устройства. Изобретение направлено на улучшение аэродинамического качества на всех режимах полета и уменьшение радиолокационной заметности летательного аппарата. 6 ил.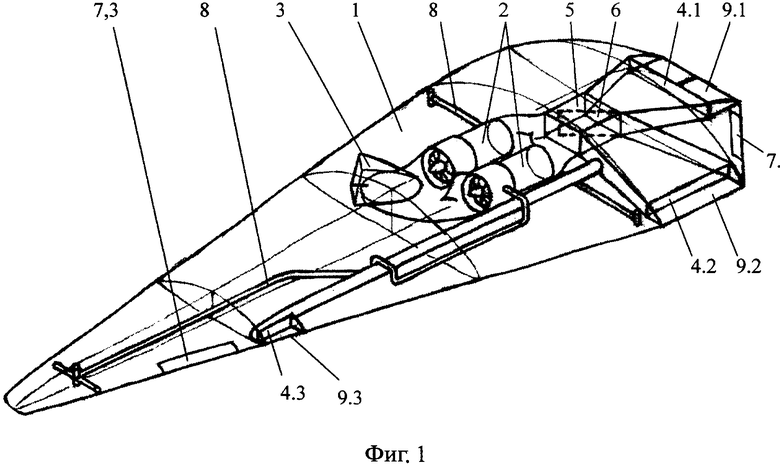
Летательный аппарат, выполненный по аэродинамической схеме «двунаправленное летающее крыло», содержащий воздухозаборное устройство, расположенную в крыле силовую установку, систему управления вектором тяги, системы управления и стабилизации полета, отличающийся тем, что воздухозаборное устройство установлено с возможностью поворота относительно продольной оси крыла в плоскости его строительной горизонтали на угол α в диапазоне от 0° до 90°, а система управления вектором тяги выполнена с возможностью изменения направления вектора тяги в плоскости строительной горизонтали на угол β=α в направлении, противоположном направлению поворота воздухозаборного устройства.
| US 20120037751 A1, 16.02.2012 | |||
| JP 2008149735 A, 03.07.2008 | |||
| US 0006568635 B2, 27.05.2003 | |||
| US 0004836470 A1, 06.06.1989 | |||
| СПОСОБ ПОЛЕТА САМОЛЕТА И САМОЛЕТ | 1992 |
|
RU2036823C1 |

