Изобретение относится к авиационной технике, а точнее к беспилотным летательным аппаратам (БПЛА).
Известен ряд беспилотных летательных аппаратов различных возможностей.
Известен беспилотный летательный аппарат (БПЛА), содержащий фюзеляж, силовую установку, включающую один или несколько воздушно-реактивных двигателей (ВРД) с отклонением вектора тяги, оперение, несущие плоскости, шасси, систему управления, реализующую одновременно аэродинамическое и тягово-моментное управление движением аппарата и угловым положением его строительной оси в пространстве, и бортовое оборудование. Аппарат имеет короткое трапециевидное крыло. Изобретение направлено на расширение функциональных возможностей путем повышения маневренности (Пат. RU 2181333 С2, (51) МПК B64D 27/20, B64D 33/02). Ввиду большого количества механизации и переразмеренного вертикального оперения БПЛА имеет низкую весовую отдачу, и, следовательно, высокую цену эксплуатации. Система управления не исключает негативного влияния помех радиосвязи и возможности несанкционированного управления полетом.
Известен комплекс малоразмерной воздушной мишени Е95 разработанный и изготавливаемый ЗАО «Эникс», г. Казань (http://www.enics.ru). Этот комплекс включает в себя малоразмерную радиоуправляемую воздушную мишень Е95М, выполненную в виде БПЛА, с пульсирующим воздушно-реактивным двигателем. БПЛА данного комплекса имеет аэродинамическую схему с прямым крылом большого удлинения, которая не обеспечивает летательному аппарату достаточной скорости и маневренности. Кроме того, полет данного БПЛА выполняется с коррекцией по ГНСС, но у командной радиолинии аппарата отсутствует защита от ГНСС-снуфинга, что снижает надежность и увеличивает риск нештатного полета.
Известен многорежимный беспилотный летательный аппарат аэродинамической схемы низкоплан, с верхним расположением двигателя, имеющий тяговые и геометрические характеристики, позволяющие аппарату летать в широком диапазоне скоростей (значения не указаны). Основной особенностью данного аппарата является опора в виде упругой посадочной лыжи расположенная в нижней части его корпуса. (Пат. RU 2327604 С1, МПК В64С]. Низкопланная схема имеет более высокое аэродинамическое сопротивление самолета в сравнении с другими схемами вследствие неблагоприятного взаимного влияния (интерференции). Кроме того, данная конструкция имеет недостатки в виде пикирующего момента, возникающего вследствие большой дистанции между центром масс аппарата и осью тяги двигателя, который необходимо компенсировать. Кроме того, применение в данной конфигурации лыжного шасси исключает возможность посадки аппарата на большинство поверхностей.
Известна малогабаритная беспилотная авиационная система, включающая БПЛА модульной конструкции самолетного типа. (Пат. RU 2473455 С2, (51) МПК, В64С 39/02). Система предназначена для воздушного наблюдения и разведки с возможностью передачи информации, получаемой бортовыми датчиками беспилотного летательного аппарата, на наземную станцию управления в реальном масштабе времени. БПЛА имеет силовую установку, расположенную в фюзеляже и снабженную двигателем с воздушным винтом. Скорость горизонтального полета беспилотного летательного аппарата невысока и составляет 60-110 км/час, максимальная высота полета над уровнем моря - до 3000 метров, продолжительность полета - до 1,5 часов, радиус действия - до 70 километров.
Существует большое разнообразие БПЛА различного типа. Практически все схемы компоновки самолета и типы фюзеляжей, которые встречаются в пилотируемой авиации, применимы и в беспилотной, но схемы, силовые установки, системы управления направлены для решения специфики конкретной задачи.
В основу настоящего изобретения положена задача создания малоразмерного беспилотного летательного аппарата, предназначенного для использования на значительном расстоянии (150-180 км) с высокой дозвуковой скоростью (650-750 км/час) с небольшой полезной нагрузкой (10-12 кг) при высокой надежности управления полетом с исключением возможности его несанкционированного управления и снижении полетных эксплуатационных затрат.
Техническим результатом является высокая надежность полетов и высокая весовая отдача.
Поставленная задача решается и технический результат достигается тем, что малоразмерный беспилотный летательный аппарат БПЛА содержит: планер самолетного типа «бесхвостка» из композиционного материала, содержащий фюзеляж и крыло стреловидной формы с обводами, образованными аэродинамическими профилями NASAM, при этом крыло может иметь легкосъемные отъемные части с элевонами, вертикальное оперение с рулями направления, установленное на законцовках крыла, или быть неразъемно закреплено с фюзеляжем, и иметь поворотные части симметричного профиля; двигатель, расположенный за фюзеляжем на проставке-воздухозаборнике; устройство управления полетом в виде пилотажно-навигационного комплекса, обеспечивающего автономный полет по запрограммированным координатам, посредствам данным бортовых инерционных датчиков и данных ГНСС, исключая возможность несанкционированного управления полетом, при этом для воздействия на управляющие органы применена электрическая система управления.
Крыло, имеющее отъемные части с элевонами, вертикальное оперение с рулями направления, может быть выполнено с аэродинамической круткой вокруг продольной оси крыла до - 2°
Целесообразно чтобы отъемная часть крыла была легкосъемной, ее крепление было выполнено посредством моментного узла, образуемого фиксацией шплинтовочным элементом трубчатого лонжерона отъемной части крыла во втулке фюзеляжа и дополнительно, посредством узла воспринимающего перерезывающую нагрузку, выполненного в виде короткого штыря, выходящего из отъемной части крыла вставленного во втулку, закрепленную в фюзеляже.
В дальнейшем данное изобретение поясняется описанием его выполнения и сопровождается чертежами, на которых:
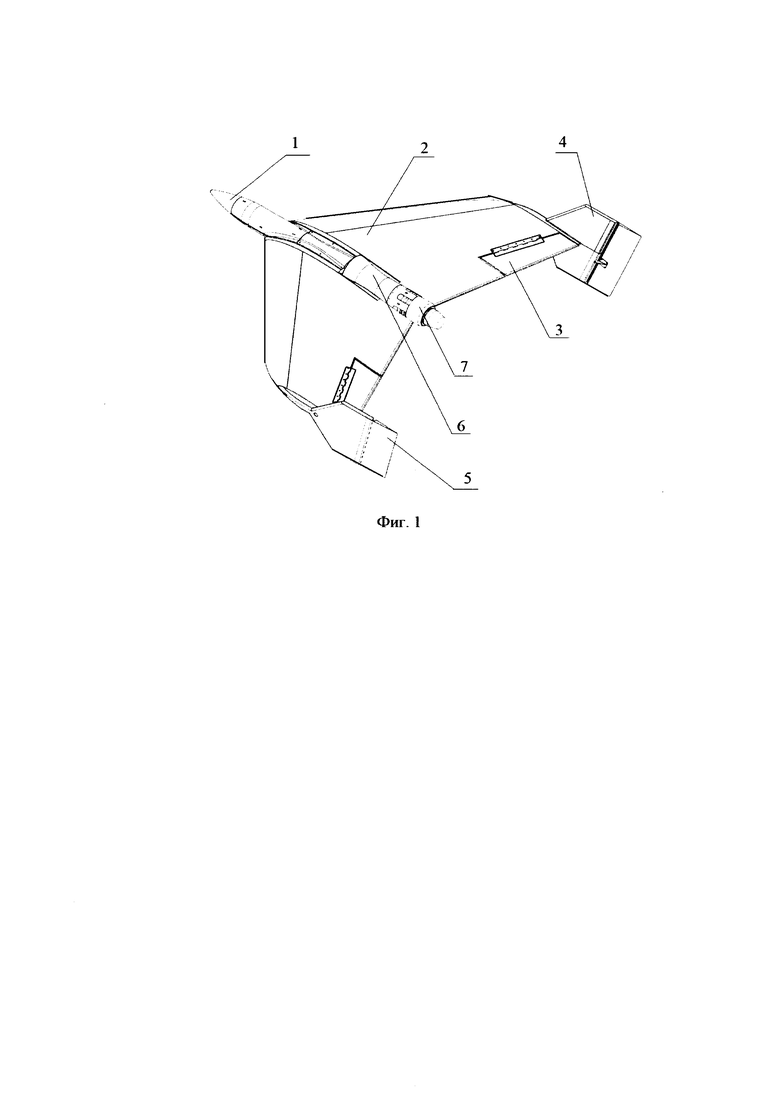
на фиг. 1 показан вариант исполнения БПЛА с отъемной частью крыла (вид в изометрии)
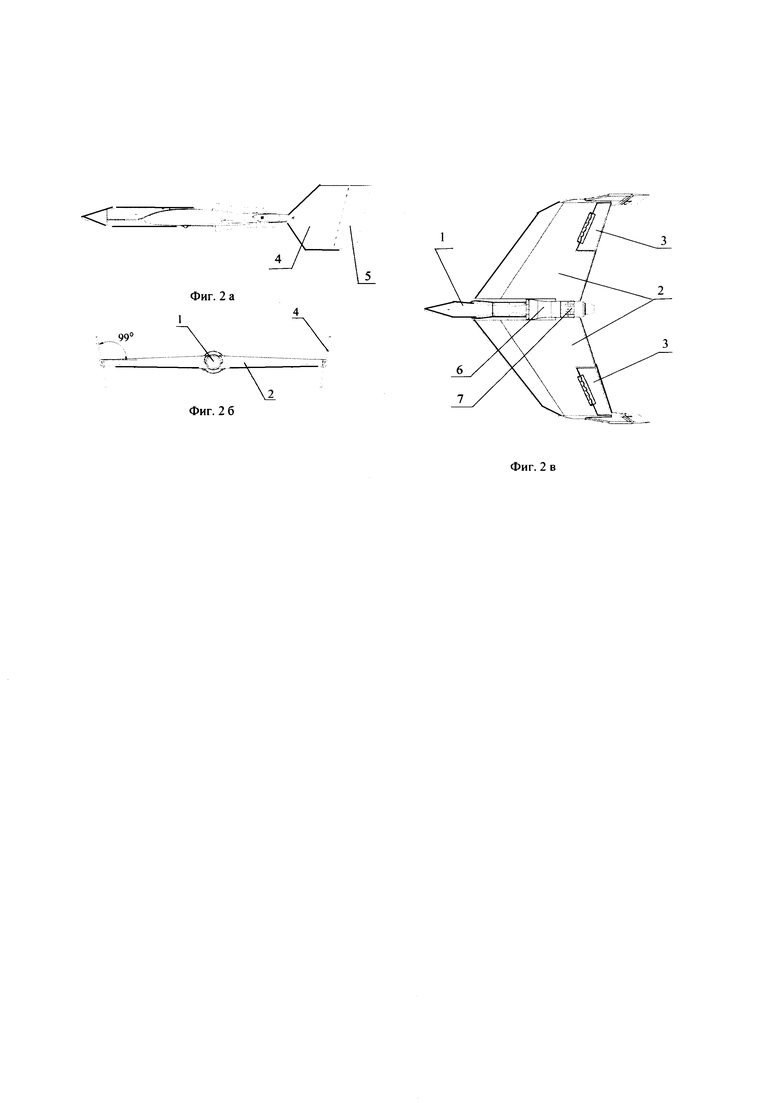
на фиг. 2 вид БПЛА фиг. 1 в проекциях: на фиг. 2а представлен БПЛА (вид сбоку) на фиг. 2б представлен БПЛА (вид спереди) на фиг.2в показан БПЛА (вид в плане)
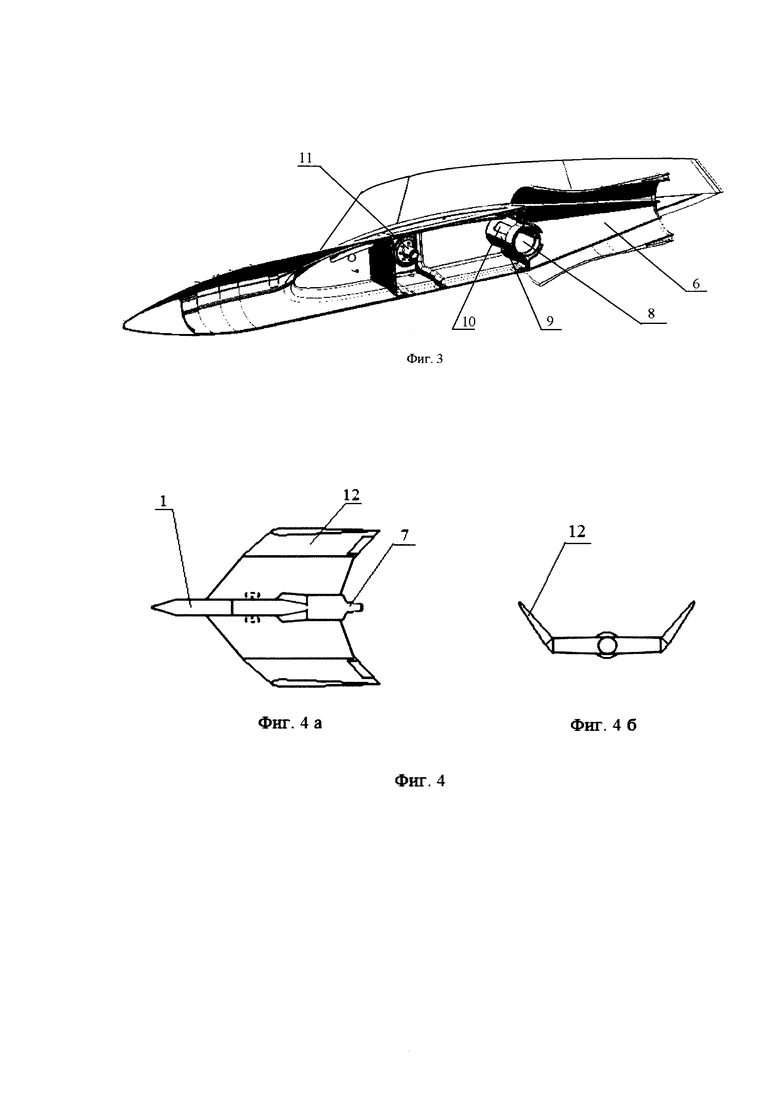
на фиг.3 показан фрагмент БПЛА фиг.1 иллюстрирующий соединение фюзеляжа и отъемной части крыла
фиг. 4 показан вариант исполнения БПЛА со складываемой частью крыла:
на фиг. 4а представлен БПЛА (вид в плане);
на фиг. 4б представлен БПЛА (вид спереди), иллюстрирующий сложение крыла.
Малоразмерный беспилотный летательный аппарат (БПЛА), согласно изобретению, устроен следующим образом.
Аэродинамическая схема беспилотного летательного аппарата представляет собой планер (моноплан) самолетного типа «бесхвостка» со стреловидным крылом размахом около 2-х метров из композиционного материала, содержащий фюзеляж 1 и крыло стреловидной формы с обводами, образованными аэродинамическими профилями NASAM.
Крыло, в одном варианте выполнения, может иметь легкосъемные отъемные части с элевонами, вертикальное оперение с рулями направления, установленное на законцовках крыла, что далее описано и иллюстрируется фиг. 1-3, или, в другом варианте, быть неразъемно закреплено с фюзеляжем, и иметь поворотные части симметричного профиля, что далее описано и иллюстрируется фиг. 4. Оба варианта обеспечивают устойчивость и управляемость аппарата в полете.
Фюзеляж 1 содержит приборный отсек, отсек полезной нагрузки, магистрали топливной системы и системы управления. В отъемной части крыла 2 размещен топливный бак (не показаны на чертежах).
В качестве композиционного материала может быть использован материал Т-10-14 на связующем ЭД-20.
БПЛА одержит двигатель 7, расположенный за фюзеляжем 1 на проставке-воздухозаборнике 6.
В качестве двигателя 7 используют турбореактивный или поршневой двигатель.
Поршневой двигатель имеет расход топлива ниже турбореактивного, это позволяет достичь максимальной дальности полета (до 200 км), относительно турбореактивного (до 170 км). Проставка-воздухозаборник 6 адаптируется под конкретный тип закрепляемого на ней двигателя 7.
Устройство управления полетом выполнено в виде пилотажно-навигационного комплекса (ПНК), включающего систему автоматического управления, которая обеспечивает полет по запрограммированным координатам, посредством данных бортовых инерционных датчиков и данных ГНСС. При этом для воздействия на управляющие органы применена электрическая система управления. Устройство управления работает автономно и исключает возможность несанкционированного управления полетом.
БПЛА имеет собственное устройство запуска в виде пусковой установки. Пусковая установка может быть выполнена в виде пневмо-полиспастной системы, обеспечивающей начальную скорость полета 20 м/с.
На фиг. 1 и фиг. 2 показан беспилотный летательный аппарат в варианте исполнения крыла с отъемной частью. По бокам фюзеляжа 1 закрепляются легкосъемные отъемные части 2 крыла с элевонами 3. На законцовках отъемных частей 2 под углом в поперечном отношении установлено вертикальное оперение 4, содержащее руль направления 5.
На фиг. 3 показано крепление отъемной части крыла 2 с фюзеляжем 1 посредством моментного узла, который образуется фиксацией шплинтовочным элементом 10 трубчатого лонжерона 8 отъемной части крыла во втулке фюзеляжа 9 и второго узла, образованного фиксацией короткого штыря (не показан), выходящего из отъемной части крыла во
Ниже более подробно рассматриваются примеры вариантов осуществления БПЛА.
Малоразмерный беспилотный летательный аппарат имеет следующие параметры:

В одном варианте крыло выполнено стреловидной формы, с аэродинамической круткой вокруг продольной оси крыла до - 2°, обводами образованными аэродинамическими профилями NASAM-6 мод. С=9,7% и NASAM-6 С=12% с большой стреловидностью по передней кромке. Это позволяет оптимизировать срыв потока, а также реализовать малые значения относительных толщин крыла при больших значениях абсолютных высот крыла, особенно в корневой части, что снижает прирост силы лобового сопротивления.
Такая конструкция создает аэродинамическую подъемную силу наилучшим образом, что позволяет максимально повысить аэродинамическую эффективность и обеспечивает высокую маневренность.
Отъемная часть крыла выполнена легкосъемной посредством моментного узла, образуемого фиксацией шплинтовочным элементом 8 трубчатого лонжерона 9 отъемной части крыла во втулке 10 фюзеляжа и дополнительно, посредством узла воспринимающего перерезывающую нагрузку, выполненного в виде короткого штыря 11, выходящего из отъемной части крыла вставленного во втулку, закрепленную в фюзеляже (фиг. 3).
На законцовках крыла под углом 99 градусов закреплено вертикальное оперение 4, которое имеет рули направления 5 со следующими параметрами:


Управление БПЛА по крену и тангажу реализовано элевонами 7 со следующими параметрами:
Фюзеляж 1 содержит приборный отсек, отсек полезной нагрузки, магистрали топливной системы и системы управления.
Конструкция планера БПЛА выполнена из композиционного материала. Т-10-14 на связующем ЭД-20.
Отсек полезной нагрузки, расположен в носовой части фюзеляжа 1 и имеет размеры: диаметр 122 мм, длину 600 мм. Максимальная масса полезной нагрузки в виде груза или оборудования мониторинга - не более 12 кг.
Двигатель 7 турбореактивный с тягой от 20 до 40 кгс расположен за фюзеляжем. Такое расположение максимально снижает аэродинамическое сопротивление и способствует достижения крейсерской скорости до 700 км/ч, маневренности и перегрузки 8G.
Устройство управления полетом выполнено в виде пилотажно-навигационного комплекса (ПНК), расположенного в средней части фюзеляжа 1, и включает программу автономного полета по заранее запрограммированным координатам для некоторого количества промежуточных точек полета, по данным получаемых от ГНСС и по данным инерциальных датчиков.
Защита от помех и исключение возможности несанкционированного управления полетом (ГНСС-снуфинга) реализовано следующим образом: при отсутствии данных от ГНСС или подмене этих данных (резкое изменение собственных координат или координат заданных точек) полет выполняется с помощью инерциальных датчиков ПНК. Таким образом на протяжении дальнейшего полета данные полученные от ГНСС сопоставляются с расчетными значениями координат, с учетом перемещения БПЛА. При совпадении расчетных значений координат с вновь получаемыми от ГНСС, в пределах погрешности системы автоматического управления, полет продолжается с коррекцией по ГНСС. При этом для воздействия на управляющие органы применена электрическая система управления
На фиг. 4 показан БПЛА в другом варианте выполнения крыла. БПЛА имеет крыло, которое неразъемно закреплено с фюзеляжем 1 и имеет поворотные части 12 симметричного профиля, которые могут складываться и отсоединяться. Увеличение весовой отдачи и минимизация аэродинамического сопротивления в этом варианте возможна за счет того, что вместо вертикального оперения 4 устойчивость и управляемость аппарата после запуска обеспечивается поворотной частью 12 крыла, имеющей симметричный профиль. С ростом скорости требуемая площадь крыла уменьшается в квадратичной зависимости.
Конструкция крыла позволяет оптимизировать срыв потока, а также реализовать малые значения относительных толщин крыла при больших значениях абсолютных высот крыла, особенно в корневой части, что снижает прирост силы лобового сопротивления.
Также конструкция создает аэродинамическую подъемную силу наилучшим образом, что позволяет максимально повысить аэродинамическую эффективность и обеспечивает высокую маневренность.
Аэродинамическая схема крыла и аэродинамическая компоновка всех механизмов вкупе позволяет достичь требуемых характеристик полета с минимальным количеством элементов механизации и веса БПЛА, гармонизировать устойчивость, аэродинамическое управление и маневренность БПЛА при увеличении весовой отдачи, а, следовательно, снижении цены эксплуатации. Вышеуказанное может способствовать достижению высокой весовой отдачи (около 25%).
Пусковая установка выполнена в виде пневмо-полиспастной системы, обеспечивающей начальную скорость полета 20 м/с. Для обеспечения мобильности БПЛА пусковая установка транспортируется и применяется по назначению установленной на шасси (прицепа или автомобиля «КАМАЗ»). При этом, БПЛА перевозится в таре, с отсоединенными отъемной частью 2, вертикальным оперением 4, отсоединяемые поворотные части 12 и разъемами магистралей топливной системы и системы управления. Это позволяет осуществлять запуск БПЛА практически из любой местности, с обеспечением высоких показателей мобильности.
Изобретение позволяет достичь высокой надежности полетов исключением возможности несанкционированного управления полетом защитой от помех и ГНСС-снуфинга с одновременным достижением высокой весовой отдачей, и, следовательно, снижением эксплуатационных затрат.
Изобретение может быть использовано для перевозки грузов весом до 12 кг на расстояние до 200 км, со скоростью до 750 км/час. Изобретение может быть использовано также для решения других задач, например, для мониторинга различных объектов, в широком диапазоне скоростей, на значительном удалении.
| название | год | авторы | номер документа |
|---|---|---|---|
| Беспилотный летательный аппарат вертикального взлета и посадки | 2021 |
|
RU2771536C1 |
| Беспилотный летательный аппарат вертикального взлета и посадки | 2021 |
|
RU2767390C1 |
| Высокоскоростной беспилотный летательный аппарат | 2021 |
|
RU2787906C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2005 |
|
RU2288140C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2021 |
|
RU2754277C1 |
| УДАРНЫЙ АВИАЦИОННЫЙ КОМПЛЕКС С БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2022 |
|
RU2810821C1 |
| Беспилотный летательный аппарат | 2023 |
|
RU2812164C1 |
| Беспилотный летательный аппарат | 2023 |
|
RU2818209C1 |
| ТЯЖЕЛЫЙ СКОРОСТНОЙ ВИНТОКРЫЛ | 2016 |
|
RU2608122C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ КОРОТКОГО ВЗЛЕТА И ПОСАДКИ | 2015 |
|
RU2606216C1 |
Малоразмерный беспилотный летательный аппарат, предназначенный для транспортировки небольшой полезной нагрузки с высокой дозвуковой скоростью на расстояние. При этом малоразмерный беспилотный летательный аппарат содержит планер самолетного типа «бесхвостка» из композиционного материала, содержащий фюзеляж и крыло стреловидной формы. При этом крыло выполнено либо в виде легкосъемных отъемных частей с элевонами и вертикального оперения с рулями направления, установленного на законцовках крыла, либо в виде частей, которые неразъемно закреплены с фюзеляжем и имеют поворотные части с рулями направления, размещенные на законцовках крыла. При этом летательный аппарат также содержит двигатель, расположенный за фюзеляжем на проставке-воздухозаборнике. Устройство управления полетом в виде пилотажно-навигационного комплекса (ПНК) включает автоматическую систему управления, которая обеспечивает полет по запрограммированным координатам, осуществляемый по данным инерциальной системы и данным глобальной навигационной спутниковой системы (ГНСС), а также обеспечивает автономный полет в том числе при отсутствии данных от ГНСС или подмене данных (ГНСС-снуфинге). При этом для воздействия на управляющие органы применена электрическая система управления. Летательный аппарат также снабжен парашютом для посадки. Техническим результатом является высокая надежность полетов и высокая весовая отдача. 5 з.п. ф-лы, 4 ил.
1. Малоразмерный беспилотный летательный аппарат, предназначенный для транспортировки небольшой полезной нагрузки с высокой дозвуковой скоростью на расстояние, отличающийся тем, что содержит: планер самолетного типа «бесхвостка» из композиционного материала, содержащий фюзеляж и крыло стреловидной формы, при этом крыло выполнено либо в виде легкосъемных отъемных частей с элевонами и вертикального оперения с рулями направления, установленного на законцовках крыла, либо в виде частей, которые неразъемно закреплены с фюзеляжем и имеют поворотные части с рулями направления, размещенные на законцовках крыла, при этом летательный аппарат также содержит двигатель, расположенный за фюзеляжем на проставке-воздухозаборнике; устройство управления полетом в виде пилотажно-навигационного комплекса (ПНК), включающего автоматическую систему управления, которая обеспечивает полет по запрограммированным координатам, осуществляемый по данным инерциальной системы и данным глобальной навигационной спутниковой системы (ГНСС), а также обеспечивает автономный полет в том числе при отсутствии данных от ГНСС или подмене данных (ГНСС-снуфинге), при этом для воздействия на управляющие органы применена электрическая система управления; летательный аппарат также снабжен парашютом для посадки.
2. Малоразмерный беспилотный летательный аппарат по п. 1, отличающийся тем, что крыло имеющее отъемные части с элевонами, вертикальное оперение с рулями направления, выполнено с аэродинамической круткой вокруг продольной оси крыла до - 2°.
3. Малоразмерный беспилотный летательный аппарат по п. 1 отличающийся тем, что содержит приборный отсек, отсек полезной нагрузки, магистрали топливной системы и системы управления, размещенные в фюзеляже, и топливный бак, размещенный в отъемной части крыла.
4. Малоразмерный беспилотный летательный аппарат по п. 1, отличающийся тем, что отъемная часть крыла имеет легкосъемное крепление посредством моментного узла, образуемого фиксацией шплинтовочным элементом трубчатого лонжерона отъемной части крыла во втулке фюзеляжа и дополнительно, посредством узла, воспринимающего перерезывающую нагрузку, выполненного в виде короткого штыря, выходящего из отъемной части крыла, вставленного во втулку, закрепленную в фюзеляже.
5. Малоразмерный беспилотный летательный аппарат по п. 1, отличающийся тем, что в качестве композиционного материала используют материал Т-10-14 на связующем ЭД-20.
6. Малоразмерный беспилотный летательный аппарат по п. 1, отличающийся тем, что используют турбореактивный или поршневой двигатель.
| WO 2019134714 A1, 11.07.2019 | |||
| EP 3728029 A1, 28.10.2020 | |||
| US 2022119113 A1, 21.04.2022 | |||
| CN 12389628 A, 23.02.2021 | |||
| US 2020180760 A1, 11.06.2020 | |||
| CN 109866914 A, 11.06.2019. |

