Изобретение относится к летательным аппаратам тяжелее воздуха, Авиационно-Космической технике. Предназначено для постройки и эксплуатации летательных аппаратов тяжелее воздуха, который может в зависимости от модификации, значительно расширить диапазон до космических высот и скоростей, осуществлять от взлета до посадки межпланетные перелеты на атмосферные планеты, создавать сверхзвуковые и гиперзвуковые грузовые и пассажирские самолеты.
Уровень техники.
Техническая проблема расширения диапазона высот и скоростей летательных аппаратов до космических заключается в необходимости сочетания лучших дозвуковых и гиперзвуковых конфигураций крыла. Самолетостроение идет пока по пути компромисса между этими конфигурациями крыла, путем ухудшения взлетно-посадочных характеристик, урезания высот и скоростей полета, либо использования дополнительных ступеней самолето или ракетоносителей.
Уровень техники обычных самолетных технологий без использования дополнительных ракетных, самолетных ступеней в ближайшие годы не позволит достичь космических высот и скоростей.
В обычной же ракетной технологии; низкие КПД двигателей, невысокая степень многоразового использования элементов конструкции ракет, большие перегрузки и температурные нагревы конструкции определяют низкий межремонтный ресурс при многоразовом использовании, что делает доставку грузов в космос более затратным, чем в предлагаемой технологии.
Известны прототипы:
1) Главный прототип: Из уровня техники известен летательный аппарат 100 аэродинамической схемы летающее крыло, содержащий крыло толстого профиля, предназначенное для полета имеющее продольную и поперечную оси, образующее конфигурацию для полета на дозвуковой скорости и конфигурацию для полета на гиперзвуковой скорости, двигатели 108,110 и средства управления, причем крыло выполнено с возможностью для полета на дозвуковой скорости в направлении поперечной оси крыла и с возможностью для полета на гиперзвуковой скорости в направлении продольной оси крыла /Патент США 4836470, 06.06.1989, описание, столбец 4, строки 19-57, фиг. 1-6, всего на 11 с., далее Д1/.
Недостатки прототипа: Там предусматривалось управление векторами тяги многочисленных преимущественно ракетных двигателей, аэродинамические рули не предусматривались, что даже для современного развития техники непосильная задача для этого типа «ЛА». В данном типе «ЛА» в дозвуковой конфигурации будет характерна очень короткая «САХ», Средне Аэродинамическая хорда, изменение положения фокуса при повороте крыла, что создаст проблемы; центровки, устойчивости и управляемости такими «ЛА». Эти проблемы и способы их преодоления в Патенте не предлагались, поэтому полеты опытных таких образцов пока не могут быть успешными при больших углах поворота крыла. В гиперзвуковой конфигурации форма крыла у прототипа «преимущественно эллипсоидная», то есть закругленная законцовка крыла, которая станет гиперзвуковым обтекателем, поэтому будет иметь большее сопротивление, чем острая, предусмотренная изобретением.
2) Пилонный поворот только двигателей. Поворотные на 90 градусов по оси «У» Пилоны с двигателями к летающему крылу крепились. Был так же неоконченный проект Northrop Grumman Switchblade. Близкий аналог. Он имел место в рамках контракта американского агенства DARPA (Defense Advanced Research Projects Agency) с фирмой Northrop Grumman (2006 год) на разработку нового демонстратора технологий OFW (oblique flying wing), то есть косого крыла. Проект должен был представлять из себя беспилотный самолет с асимметричным поворотным крылом для длительных полетов на сверхзвуковой скорости (2М) с углом поворота крыла до 60° и размахом 61 метр. По схеме это должно было быть летающее крыло с подвесным модулем, в котором бы монтировались двигатели и спецоборудование. Недостатки прототипа: Ожидаемо, полет с поворотом прямого крыла, большого удлинения, всего на 60° при одном поворотном пилоне с двигателями столкнулся с проблемами устойчивости и управляемости, интерференции модуля с крылом. Достичь космических высот и скоростей невозможно.
Использование 2-х мотогондольных крыльев (Фиг.1) и системы управления центровками помогло бы им хоть как то ослабить эту проблему устойчивости и управляемости при полете на переходном режиме при повороте крыла на «ﮮП=60°». Хотя лучшие характеристики устойчивости и управляемости были бы при «ﮮП=90°» в сверхзвуковой конфигурации. (Фиг.4)
3) В 1970-е годы была Концепция «Flying Oblique Wing», разработанная автор R.T. Jones, art by Rick Guidice, для НАСА, там было летающее крыло с поворотными двигателями, но угол поворота был меньше 90 градусов, поэтому там принципы «симметрии» для такого типа «ЛА» не соблюдались. Недостатки прототипа: Достичь космических высот и скоростей невозможно.
4) Ракетные аналоги ракетопланы «Буран» (СССР 1984 г.в) и Space Shuttle (США 1981 г.в.) имели малую площадь крыла, и поэтому крайне урезанный диапазон высот и скоростей для пилотирования по самолетной технологии.
Недостатки прототипа: Взлет с ВПП не возможен. Из-за малой площади крыла, спуск с орбиты не позволяет избежать сильного теплового нагрева. Поэтому установленная теплозащита сильно утяжеляет конструкцию этого «ЛА». Низкое аэродинамическое качество сужает район возможного приземления.
5) Преимущества предлагаемого изобретения по сравнению с известными прототипами:
Конструктивно в полете поочередно меняются конфигурации крыла.
А. В дозвуковой конфигурации:
a) Большая площадь и толстый профиль крыла при угле 0 градусов, «ﮮП=0°», обеспечат: Высокие удельные коэффициенты полезного веса. (Соотношение полезного груза к массе конструкции), выше среднего коэффициенты удельного полезного объема. (Соотношение полезного объема к общему объему «ЛА»). Высотная программа полета за счет ухода от режимов полета с сильным нагревом конструктивных элементов, еще позволит сэкономить на весе теплозащитных материалов. Большие значения максимальной взлетной массы. Высокие Взлетно-посадочные характеристики такого крыла при угле поворота 0 градусов, П=0°», дадут относительно короткие старт и посадку с возможностью сэкономить на оборудовании взлетно-посадочной механизации, чего не могут себе позволить их аналоги со стреловидным сверхзвуковым крылом.
b) Большая площадь и длинны хорды летающего без фюзеляжного крыла даст возможность использовать свойства Экранного эффекта Земли, увеличение подъемной силы и статической устойчивости самолета по крену и углу атаки вблизи земли, на взлетно-посадочных режимах, чем самолеты классической аэродинамической схемы.
c) Известно, что большие площади прямого крыла, (незначительной стреловидности), и высокие значения коэффициента подъемной силы Cy, аэродинамического качества К(макс), уменьшают наивыгоднейшую скорость Vнв, при условии достаточно мощной силовой установке, большой разницы располагаемых и тяг потребных, значительно улучшит высотные характеристики ЛА, в частности Практический потолок ЛА и скороподъемность, по сравнению со стреловидным крылом.
d) Высокое аэродинамическое качество К(макс) по «Высотной программе полета» на всех скоростях полета, обеспечит относительно низкий удельный расход топлива.
Б. В сверхзвуковой или гиперзвуковой конфигурации,
поворот крыла до 90 градусов разворачивает крыло по Специальной программе из дозвуковой конфигурации в сверхзвуковую или гиперзвуковую, (в зависимости от коэффициента трансформации, «Τ(90»,) изменяет и оптимизирует превосходные свойства крыла дозвуковых; толстого профиля, больших площади и удлинение крыла в хорошие гиперзвуковые характеристики. Этим обеспечивается адаптация ко всем условиям полета в атмосфере заявленном диапазоне высот и скоростей.
a) За счет большей стреловидности и меньшей относительной толщине профиля крыла в этой конфигурации, значительно уменьшиться волновое сопротивление по сравнению с существующими сверхзвуковыми аналогами, влияние ударных волн будет минимальным.
b) Отсутствие фюзеляжа позволяет избежать его негативного влияния, интерферентных ударных волн волнового кризиса, на обтекание крыла при больших углах стреловидности.
c) Возможность достичь космических высот и орбит на ракетно-баллистическом режиме за пределами атмосферы.
1. Осуществление изобретения.
1) Задача изобретения:
В интересах воздушных грузовых перевозок расширить диапазон высот и скоростей «ЛА» вплоть до космических, снизить затраты топлива и материалов, улучшить грузоподьемность и взлетно-посадочные характеристики по сравнению с ракетными и самолетными технологиями. Продвинуть менее затратные самолетные технологии в освоении космического пространства.
2) Решение поставленной задачи осуществляется сочетанием лучших дозвуковых и гиперзвуковых конфигураций крыла. Было взято Крыло дозвуковой конфигурации, соответствующее принципу «не строгой симметрии», несовместимое даже со сверхзвуковыми скоростями, и был найден способ (поворотом без фюзеляжного крыла на 90 градусов), преобразовать их в хорошие характеристики сверхзвуковой, гиперзвуковой конфигурации крыла, чтобы расширить диапазон высот и скоростей вплоть до космических.
3) Технический результат настоящего изобретения обеспечивается:
I. Летательным аппаратом аэродинамической схемы летающее крыло, содержащий крыло толстого профиля, предназначенное для полета, имеющее продольную и поперечную оси, образующее конфигурацию для полета на дозвуковой скорости и конфигурацию для полета на гиперзвуковой скорости, двигатели и средства управления, упомянутое крыло выполнено с возможностью для полета на дозвуковой скорости в направлении поперечной оси крыла и с возможностью для полета на гиперзвуковой скорости в направлении продольной оси крыла, отличающийся тем, что крыло выполнено с возможностью уменьшения; относительной толщины профиля и радиусов закруглений кромок крыла, удлинения крыла, увеличения; стреловидности по передним кромкам и сужения крыла.
Согласно изобретению:
II. «ЛА» снабжается поворотными механизмами для поворота двигателей относительно крыла, или двигатели выполнены с возможностью поворота вектора тяги до 90 градусов, либо по крайней мере не менее 2 двигателей, выполненных с возможностью создать векторы тяги вдоль продольной и поперечной осей. (Фиг.1 и 3).
III. Крыло «ЛА» имеет симметрию по линиям продольной (Х) и поперечной (Z) осей, включая продольную симметрию по осям линии в 50% Средней Аэродинамической Хорды профиля крыла в плане, но эта симметрия не носит строгий характер. (Фиг.2)
Как пример, возможно можно будет использовать в дозвуковой конфигурации крыло с закругленной передней кромкой и острой задней, при условии компенсации неуравновешенных сил и крутящих моментов, хотя бы за счет изменения центровки за пределы оси симметрии, что существенно ослабит негативные последствия изменения положения фокуса при повороте крыла. Тогда сверхзвуковой экономичный набор высоты на наивыгоднейшем угле атаки и постоянном скоростном напоре (Высотной программы)не вызовет опасной разбалансировки «ЛА» при росте скорости.
IV. В зависимости от модификации, «ЛА» может быть предназначен для полетов с промежуточным углом поворотом крыла, от 0 до 90 градусов относительно оси (Y). Как пример, «ЛА» такого типа с мотогондольными крыльями (Фиг.1) может стать сверхзвуковым пассажирским самолетом с промежуточным, косым крылом.
V. Крыло «ЛА» имеет убирающиеся рули направления и сменные функции элевонов.
Без этого данный тип «ЛА» на сегодняшнем уровни техники летать не сможет. Исключение: «ЛА» с мотогондольными крыльями (Фиг.1).
VI. Применен универсальный способ; облегчения пилотирования «ЛА», ускорения обучения, переучивания летного состава в наработке практических навыков пилотирования, за счет возможности установить единую постоянную дифференциальную зависимость заданных угловых скоростей вращения крыла в зависимости от установленных величин; отклонений рулей управления и потребных усилий в рамках эксплуатационных ограничений, и на всех типах Летательных аппаратов, тренажерах.
Пояснение. Современные системы управления не предполагают такой единой дифференциальной зависимости на всех режимах пилотирования, разных типах «ЛА», поэтому пилотам при переучивании приходится длительней нарабатывать; новые навыки пилотирования, скорость и точность управляющих движений на различных режимах и разных «ЛА», добиваясь заданных угловых скоростей в различных осях «ЛА».
У некоторых типов «ЛА» в силу; конструктивных особенностей и режимов полета, могут быть опасно увеличиваться крутящие моменты при привычных отклонениях рулей управления пилотом. Так на посадке для самолетов ВКС с большой стреловидностью, привычное небольшое отклонение руля направления для пилотов с прямым крылом, может привести к развитию катастрофической ситуации. Для рассматриваемого типа «ЛА», при повороте крыла, и других режимах полета эффективность органов управления будет меняться в слишком большом диапазоне, что может привести к аварийной ситуации. Но применение этой технологии поможет даже слабо подготовленному пилоту легче справится с опасной ситуацией.
VII. «ЛА» снабжен автопилотом для полета по заданным углам атаки на 1 и 2 режимах полета.
Пояснение. Для повышения экономичности и безопасности полетов потребуется пилотирование по заданным, преимущественно на наивыгоднейших углах атаки. Для использования 2 режима полета при торможения на спуске с больших высот потребуется полет по заданному углу атаки.
VIII. «ЛА» снабжен автопилотом, который выполнен с возможностью компенсировать возникающие; динамическую и статическую неустойчивость путем гашения больших амплитуд автоколебаний при отрицательных запасах устойчивости по углу атаки, крена и скольжения.
IX. Для что для полета на гиперзвуковой скорости, преимущественно используются в дозвуковой конфигурации формы крыла в плане с острой его законцовкой, которая в гиперзвуковой конфигурации станет головным гиперзвуковым обтекателем. Такое обтекатель будет иметь меньшее сопротивление.
2. Краткое описание Чертежей.
Общее описание:
a) Примечания:
- Указаны вектора от двигателей «Рдв.дозв»- означает использование двигателя на дозвуковой скорости, при «ﮮП=0°»
- «Рдв.гип»- означает использование двигателя на сверхзвуковых и гиперзвуковых скоростях полета при «ﮮП=90°».
- Направление Рдв векторно показывает направление полета летательного аппарата в зависимости от угла поворота.
- Вектора «V,V90,Vс, Vп указывают на направление набегающего потока воздуха на «ЛА».
- Гиперзвуковая и сверхзвуковая конфигурации при «ﮮП=90°» - названы условны по визуальному соотношению длин крыла и центральной хорды.
- Все номера позиций и отдельных деталей «ЛА» неизменны во всех фигурах.
a) Фиг.1. Используются технические рисунки Мотогондольной модификации «ЛА», «многоугольного крыла» в 2 плоскостных осях; «X-Z” (вид с верху) «Y-Z» (вид с зади).
 Поз.1. Вид с верху в дозвуковой конфигурации от взлета до скорости начала поворота крыла. Угол Поворота крыла составляет «ﮮП=0°». Полет только на 2 режиме полета.
Поз.1. Вид с верху в дозвуковой конфигурации от взлета до скорости начала поворота крыла. Угол Поворота крыла составляет «ﮮП=0°». Полет только на 2 режиме полета.
Поз.4.Вид сзади во взлетной конфигурации. Угол Поворота крыла составляет «ﮮП=0°»
Поз.2. Вид с верху при изменении конфигурации за счет поворота крыла, при достижении Трансзвуковой скорости и заданной высоты полета. Или сверхзвуковой полет пассажирского «ЛА» с косым крылом, промежуточным поворотом крыла «90>«ﮮП>0°».
Поз.3. Вид с верху в сверхзвуковой, малой гиперзвуковой или большой гиперзвуковой конфигурации в зависимости от «Коэффициента трансформации», «Т» после полного поворота крыла. Полет на 1, 2 режимах при торможении с орбиты, либо орбитальный, или межпланетный полет в ракетно-маршевом режиме в безвоздушном пространстве. Обозначение деталей Фиг.1:
(1)- Крыло с редуцированным фюзеляжем.
(2)-Мотогондольное крыло с двумя двигателями на концах крыльев и шасси, 2 рулями направления. Мотогондольные крылья малой дозвуковой стреловидности с турбореактивными двигателями, после поворота крыла на 90 градусов, (Поз.3.) могут быть отстыкованы и возвращены на аэродром для самостоятельной посадки. Тогда основное крыло (1) сможет запустить свои прямоточные реактивные двигатели для полета на гиперзвуковой скорости.
(3)- Поворотный пилон.
c) Фиг.2.
Поз.5. Изображен вид сверху в осях «X-Z» различных форм крыла в плане
Формы крыла в плане:
(7)-гиперболическая, (8)-ромбовидная, (9)-выпуклого многоугольная, (10)-эллиптическая, (15)- многоугольная, вогнутая.
Обозначение деталей Фиг.2:
При Варианте управления концевыми рулями элевонами-рулями высоты при повороте крыла в лево на 90 градусов, «ﮮП=-90°»:
(5)- руль высоты во взлетной, дозвуковой конфигурации гиперболического крыла, «ﮮП=0°», и элевон в гиперзвуковой конфигурации крыла, «ﮮП=90°».
(6)- элевон во взлетной, дозвуковой конфигурации, «ﮮП=0°», и руль высоты гиперзвуковой конфигурации крыла, «ﮮП=90°».
(13)- Отклоняемый дозвуковой обтекатель во взлетной, дозвуковой конфигурации, «ﮮП=0°», и элевон в гиперзвуковой конфигурациях крыла, «ﮮП=90°».
(14)- Элевон в во взлетной, дозвуковой конфигурации, «ﮮП=0°», и отклоняемый (сверх)гиперзвуковой обтекатель в гиперзвуковой конфигурации крыла, «ﮮП=90°».
Поз.6. Изображено сечение профиля А-А по продольной оси «ЛА» вид Y-Х в осях, аэродинамические точки и линии:
(С)- максимальная толщина профиля крыла во всех конфигурациях и при повороте крыла не меняется.
(Хс) Положение «С» по оси «Х», меняется с поворотом крыла.
(Уср) –толщина «САХ», Средней аэродинамической хорде.
(b1)=(l2)-хорда крыла, при угле поворота крыла «ﮮП=0°», равная размаху крыла при поворота крыла на угол 90°, «ﮮП=90°».
(b2)=(l1)-хорда крыла, после поворота крыла на угол 90°, «ﮮП=90°», равная размаху крыла при повороте крыла на угол 0°,
«ﮮП», - Угол поворота крыла измеряется по хорде крыла. «ﮮП=0°» поворот крыла 0 градусов, «ﮮП=90°» поворот крыла на 90 градусов от начального значения «ﮮП=0°». Могут быть промежуточные угля поворота.
(fмах) Максимальная кривизна профиля, меняется с поворотом крыла.
(Хfмах)- Координаты по оси «Х» точки с максимальной кривизна профиля, меняется с поворотом крыла.
(Rп)- радиус закругления передней и задней кромок крыла, должны быть (не строго) симметричны или должны отсутствовать, уменьшается с поворотом крыла.
(Ув)- максимальная толщина отрицательной кривизны (вогнутости) нижней поверхности профиля по оси «Y», при дозвуковой конфигурации, и толщина образованная отрицательным углом поперечного «V крыла», «Vкр», после поворота крыла на угол 90°, «ﮮП=90°» в гиперзвуковой конфигурации.
(11)- Средняя линия крыла меняется с поворотом крыла.
(Yср)- Положение Средней линии крыла по оси «Y».
d) Фиг.3 Сверхзвуковые или гиперзвуковые конфигурации изображены условно, в дозвуковой конфигурации меньшая хорда крыла соответствует Гиперзвуковой конфигурации, а большая дозвуковой.
Варианты Конфигураций «ЛА» в чертежах:
Поз.7- Гиперзвуковой - дозвуковой конфигурациях крыла, Летательный аппарат с крылом многоугольного, выпуклого типа типа и двумя мотогондольными крыльями, с 4 поворотными двигателями.
Поз.8- Сверхзвуковой - дозвуковой, конфигурациях крыла, Летательный аппарат с крылом ромбовидного типа, с дозвуковым и сверхзвуковым, внутри крыльевыми, двигателями с геометрическим сжатием воздуха в воздухозаборнике, исполненных без использования механизмов поворота вектора тяги двигателя.
Поз.9- Гиперзвуковой - дозвуковой конфигурациях крыла, Летательный аппарат ромбовидного типа с 2 дозвуковыми и одним Гиперзвуковым внутри крыльевыми двигателями с геометрическим сжатием воздуха в воздухозаборнике, исполненных без использования механизмов поворота вектора тяги двигателя.
Поз.10- Гиперзвуковой - дозвуковой конфигурациях крыла, Летательный аппарат с крылом гиперболического типа с 2-мя дозвуковыми и 2-мя Гиперзвуковыми внутри крыльевыми двигателями, исполненных без использования механизмов поворота вектора тяги двигателя.
Поз.11-Сверхзвуковой -дозвуковой конфигурациях крыла, Летательный аппарат с крылом гиперболического типа с одной внутри крыльевой камерой сгорания, реактором. В дозвуковой конфигурации используются 2 воздухозаборника геометрического сжатия воздуха и 2 сопла с изменяемыми векторами тяги двигателя. В гиперзвуковой конфигурации используются 2 воздухозаборника геометрического сжатия воздуха и 2 сопла с изменяемыми векторами тяги двигателя
Поз.12-Сверхзвуковой -дозвуковой конфигурациях крыла, Летательный аппарат с крылом эллиптического типа с подкрыльевыми универсальными или ракетными двигателями на поворотных пилонах.
Поз.13 - Гиперзвуковой - дозвуковой конфигурациях крыла, Летательный аппарат с крылом «усеченного эллипса», острым гиперзвуковым обтекателем, с 2 дозвуковыми, внутри крыльевые двигателями и одним ракетным не прямоточным, твердотопливным двигателем.
e) Фиг.4 - Рисунки «ЛА» с крылом ромбовидного типа в дозвуковой и промежуточной конфигурации, вид сверху в осях «X-Z» с видами сверху и с боку.
Поз.14- «ЛА» с выпущенными килями в дозвуковой, промежуточной и гиперзвуковой модификациях. Вид с верху.
Поз.15.Вид с боку (Поз.14).
Поз.16- «ЛА» с выпущенным килем только гиперзвуковой модификации. Киль из дозвуковой модификации убран в корпус «ЛА». Вид с верху.
Поз.17.Вид с боку (Поз.16).
(17)- Управляющие элементы «ЛА», элевоны с 3-мя сменяемыми функциями в зависимости от величины поворота крыла:
 В дозвуковой конфигурации «ЛА» «ﮮП=0°», когда вектор скоростного потока «V0» параллелен дозвуковой продольной оси:
В дозвуковой конфигурации «ЛА» «ﮮП=0°», когда вектор скоростного потока «V0» параллелен дозвуковой продольной оси:
(d2,с1)- рули высоты
(d1,с2)- элероны
(a1,a2,b1,b2)- отклоняемые передние кромки крыла, обеспечивают максимальное аэродинамическое качество.
(16) – Цельно поворотный, убирающийся, телескопического или веерного типа руль направления, различной формы киля в плане; треугольный эллипсоидный, трапециевидный… Задний руль направления выпущен, боковой убран.
В промежуточной конфигурации «0>ﮮП>90°», когда вектор скоростного потока (Vc) параллелен боковым сторонам крыла.
(с1,с2)- рули высоты
(b1,b2,d1,d2)- элероны
(a1,a2)- отклоняемые передние кромки крыла, обеспечивают максимальное аэродинамическое качество.
Работают все Цельно поворотные рули направления для парирования неуравновешенных аэродинамических моментов.
В гиперзвуковой конфигурации «ﮮП=90°», когда вектор скоростного потока «V90» параллелен новой продольной оси «ЛА»
(b2,с2)- рули высоты
(b1 с1)- элероны
(a1,d1,a2,d2)- отклоняемые передние кромки крыла, обеспечивают максимальное аэродинамическое качество.
Работает только задний руль направления, а боковой складывается в корпус.
Для этого типа «ЛА» будет характерно Сложная управляемость, плохая динамическая и отрицательная статическая устойчивость при повороте крыла, вызванная следующими факторами:
- Смена функций элевонов в системе управление «ЛА»
- Перераспределение площадей с одинаковыми функциями этих элементов,
- изменение расстояний от этих элементов до центра тяжести, плеч аэродинамических моментов,
- изменение положений аэродинамического фокуса и центра тяжести.
Следовательно, при повороте крыла на 90 градусов, будет изменение величин и направлений управляющих крутящих моментов от управляющих элементов при одинаковых отклонениях органов управления и прикладываемых усилий.
Поэтому для этого типа «ЛА» потребуется новые функции автопилота:
Обеспечить единую, унифицированную для всех «ЛА», тренажеров, постоянную дифференциальную зависимость заданных угловых скоростей вращения крыла по всем аэродинамическим осям в зависимости от установленных величин; отклонений ручек управления и потребных усилий, с учетом положения текущих передних кромок и автоматической смены функций управляющих элементов, и в рамках эксплуатационных углов; атак, скольжений, кренов, и перегрузок на всех режимах полета, включая безвоздушные за счет маневровых ракетных двигателей.
(χ2,χ1) Стреловидности крыла по передним кромкам в дозвуковой и гиперзвуковой конфигурации крыла.
Аэродинамические, геометрические характеристики крыла в различных Вариантах управления «ЛА» при повороте крыла отображенных на чертежах:
Обычная центровка. (Фиг.4)
(Хт1)- Положение центра тяжести в дозвуковой конфигурации около 20%САХ. Сложно будет обеспечить для такого типа «ЛА».
(ХF1) – Положение фокуса в дозвуковой конфигурации.
(ХЗУ1)- Положительный Запас устойчивости по углу атаки (ХЗУ1= ХF1– Хт1) в дозвуковой конфигурации обычно для транспортной авиации он составляет до 20%САХ.
(ХF2) – Положение фокуса в гиперзвуковой конфигурации, после поворота на 90 градусов, куда он переместится по эллипсоидной траектории. Тогда происходит разбалансировка «ЛА», образуя неуравновешенные крутящие моменты по аэродинамическим осям:
В начале, нарастающие моменты; крена по оси «Х», и скольжения по оси «Y» против поворота крыла, и сильный кабрирующий момент по оси «Z», отягощенный отрицательным запасом устойчивости по перегрузке, потому что центр тяжести в проекции оказывается позади фокуса.
Без контрмер это будет Катастрофическая ситуация.
(Хт2)- Новое конечное положение центра тяжести после поворота крыла на 90 градусов, куда нужно его переместить из точки «Хт1», чтобы избежать катастрофической ситуации.
Обеспечивается:
- Изменением положения Центра тяжести на промежуточное между «Хт1» и «Хт2» перед поворотом крыла.
- Выработкой и перекачиванием топлива, свободным перетеканием топлива через управляемые отверстия секций баков с топливом за счет крена и тангажа, перемещением груза, крыльевой механизацией,
- Уменьшением Полной аэродинамической результирующей силы «R», приложенной в фокусе «ЛА», полет с около нулевой перегрузкой.
- Новыми функциями автопилота с дублированными системами.
Альтернативная центровка.
В этом типе «ЛА» перед поворотом крыла, чем ближе центр тяжести будет к линии «САХ», тем меньше будут значения неуравновешенных аэродинамических моментов, упомянутых выше, тем меньше надо будет перемещать грузы и топливо для сохранения положений центра тяжести в эксплуатационных границах. Необходимо подобрать профиль, конфигурацию «ЛА» с задним положением Фокуса. Перед поворотом следует переместить центровку между точками «Хт2 и Хт1» в зависимости от коэффициента трансформации «Т», как можно ближе к точке пересечения линий хорды и размаха крыла.
То есть в период поворота крыла все равно получится «ЛА» с отрицательным запасом устойчивости по перегрузке. В ручном управлении на пологом снижении поворот крыла осуществлять на около нулевых, отрицательных углах атаки, которые снизят неуравновешенные аэродинамические крутящие моменты до приемлемых, за счет уменьшения полной аэродинамической силы «R» при перемещении положения фокуса «ЛА». Возникающую раскачку «ЛА» уменьшать двойными короткими движениями ручки управления, ранее отработанных на тренажере. И после поворота крыла на 90 градусов, положение центра масс должно обеспечить управляемость «ЛА», запустить внутри крыльевые гиперзвуковые двигатели, если используется такая конфигурация. Их запуск до окончания изменения центровки создаст неуравновешенный крутящий момент вокруг оси «Y». Далее разгон до сверхзвука для обеспечения положительного запаса устойчивости по перегрузке, от волнового перемещения положения фокуса «ЛА» назад до (ХF3). И только после этого можно далее перейти к набору высоты и разгону скорости.
(Хт3) - Положение центра тяжести в дозвуковой конфигурации позади фокуса(ХF1).
(Хт4)- Положение центра тяжести в гиперзвуковой конфигурации, при повороте крыла на 90 градусов. Когда запас устойчивости по углам атаки станет около нулевым, отрицательным. (ХЗУ1=ХF1–Хт1) Будут проявляться неустойчивость по углу атаки, возникающие отклонения, автоколебания которой, могут быть погашены новой функцией автопилота. После поворота крыла на 90, за счет выработки и перекачки, перелива топлива можно вернуть запас устойчивости по перегрузке в заданные эксплуатационные значения.
(ХF3) Новое положение фокуса «ЛА» при разгоне скорости на сверхзвуке после полного поворота крыла. Переместит фокус «ЛА» на 20-27% САХ назад, увеличивая положительный запас устойчивости по перегрузке.
3. Теоретическое обоснование этого типа «ЛА».
1) Характеристики крыла. Описание (Фиг.2).
Наиболее характерные формы крыла в плане (Поз.5) для этой схемы Летающего крыла, вписываются в ромб;
(15)- многоугольная, вогнутая (7)-гиперболическая, (8)-ромбовидная, (9)-выпуклого многоугольная, (10)-эллиптическая, (Поз.13)эллиптическая усеченная.
(Поз.6) Разрезы крыла в плане А-А.
2) По Принципам симметрии:
a) Симметрии по линиям аэродинамических осей; продольной «Х» и поперечной «Z». Из-за поворота крыла на угол 90 градусов, необходимо применять правила симметрии по линиям аэродинамических осей; продольной «Х» и поперечной «Z» крыла в плане и его профиля, где традиционный фюзеляж использоваться не может.
b) «Не строгой симметрии», означает возможность небольшой асимметрии, «Труды МАИ». Выпуск № 82 УДК 533.6.013.413 «Численное моделирование аэродинамической асимметрии и способ обеспечения боковой устойчивости маневренного самолета.» Предусматривает возможность некоторой асимметрии, при соответствующей компенсации дисбаланса балансировочных сил и моментов на всех режимах полета.
3) По форме крыла в плане и его профиля.
4) Тогда исходя из принципа симметрии, любые крылья этого типа «ЛА» можно вписать в ромб. То есть все типы крыльев в плане этого типа «ЛА» будут иметь определенные зависимости от свойств Ромба.
При повороте крыла на «ﮮП=90°» получим: b1=l2 , b2=l1, (ф.1), где
b1 и l1- центральная хорда и размах крыла до поворота крыла ﮮП=0°,
l2 и b2- центральная хорда и размах крыла после поворота крыла ﮮП=90°.
Тогда получим характеристики крыла этих типов «ЛА»:
a. Τ(90)- коэффициент трансформации конфигурации при повороте крыла на 90 градусов. Τ(90)= b2/b1=l1/l2, (ф.2)
b2= Τ(90)*b1, (ф.3)
Ɩ2= Τ(90)*l1, (ф.4)
b. Удлинение крыла λ1=l1/S2, λ2=l2/S2= Τ90*Ɩ1/S2=Τ90*λ1,
λ2=Τ(90)*λ1 (ф.5)
c. Площадь крыла ромба S=1/2*l1*b1
d. Относительная толщина профиля
Č1=Смах/b1,Č2=Смах/b2= Смах/(b1*Τ(90))= Č1/Τ(90), Č2=Č1/Τ(90) (ф.6)
e. Сужение крыла ɳ=b1/b0 для гиперзвуковой скорости законцовка крыла должна стать гиперзвуковым острым головным обтекателем, поэтому сужение будет всегда большим.
Относительное сужение ђ1=(b1-b0)/Ɩ1=b1/l1,
ђ2 = b2/l2=(b1/Τ(90))/(Τ(90)*l1)=ђ1/Τ(90)2 (ф.7) для каждого типа крыла в плане свое, но в соответствующих пропорциях.
f. Радиусы закругления передней и задней кромки при повороте крыла до 90 градусов уменьшаются, и при повороте на 90 градусов радиусы закругления будут ровны нулю градусов.
g. Стреловидность крыла по передним кромкам крыла
Из свойств прямоугольного треугольника, для ромбовидного крыла Фиг.2.Поз.5
χ2+χ1=90, (ф.8) χ2=tg(l1/2:b1/2)=tg(l1/b1)=tg(Τ(90)) χ1=сtg(Τ(90)) (ф.9) для остальных типов «ЛА» пропорции углов стреловидности от Τ(90) сохранятся, только по другим тригонометрическим формулам.
Примерная задача по конструированию некоторых свойств этого типа «ЛА»:
Дано: Известны дозвуковые толстые профили с относительной толщиной Č1=0,12.
Произвольно зададим Č2=0,01, Для сверхзвукового профиля,
а для гиперзвукового (Č2=0,005).
Необходимый угол стреловидности сверхзвукового и гиперзвукового крыла по передним кромкам χ2=75 и 80 градусов соответственно.
Задача: расширить диапазон высот и скоростей.
Решение: Тогда согласно (ф.9) для ромбовидного такого типа крыла понадобится взлетный угол стреловидности χ2=15 для сверхзвуковой и χ2=10 градусов по передним кромкам для гиперзвуковой скорости.
Можно выбирать любой дозвуковой работоспособный толстый профиль по условиям нестрогой симметрии, с высокими значениями «Су» и «К(макс)». Тогда относительная толщина профиля составит Č2=0,01=0,12/Τ(90), а для гиперзвуковой конфигурации Č2=0,005=0,12/Τ(90), тогда необходимый коэффициент трансформации будет равен Τ(90)=Č1/Č2=0,12/0,01=12, и для гиперзвуковой конфигурации Τ(90)=Č1/Č2=0,12/0,005=24, то есть во взлетной конфигурации, где угол поворота крыла равен 0 градусов, («ﮮП=0°»), размах крыла должна быть в 12 раз, а для гиперзвука в 24 раза больше, чем длинна хорды чтобы изменить относительную толщину дозвукового профиля с 0,12 до сверхзвукового Č2=0,01 или гиперзвуковых Č2=0,005.
Примечания:
- Возможны полеты с косым крылом, тогда для расчетов возможен и промежуточный коэффициент трансформации конфигурации, например Τ(60).
- Взлет и посадку обеспечит дозвуковая конфигурация крыла, расширение диапазонов высот и скоростей лучше обеспечит гиперзвуковая конфигурация летательного аппарата этого типа.
- Чем ниже нужно значения относительной толщины профиля, при толстом профиле крыла после поворота крыла на угле 90 градусов, в зависимости от коэффициента трансформации конфигурации, Τ(90)=b/l», тем больше должен быть размах и удлинения крыла на взлете при «ﮮП=0°», тем выше аэродинамическое качество и практический потолок, ниже удельный расход топлива дозвуковой конфигурации крыла. Поэтому от Τ(90) зависит вид конфигурации при повороте крыла либо сверхзвуковая, или гиперзвуковая.
- Чем больше относительная толщина профиля в «Дозвуковой конфигурации», тем больше удельный объем и удельный вес полезной нагрузки может быть. Сверхтолстые профили крыла будут востребованы в этой аэродинамической схеме.
5) Устойчивость и управляемость «ЛА» (Фиг.4):
На устойчивость и управляемость этого типа «ЛА» влияют 2 фактора:
a) При росте скорости до сверхзвуковой, волновой кризис из точки «ХF2» перемещает назад по оси «Х» на 20% «САХ» положение фокуса в точку «ХF3», увеличивая запас устойчивости «Хзу».
b) При повороте крыла на угол «ﮮП=90°»,фокус перемещается по эллипсоидной траектории с точки «ХF1» в «ХF2», поэтому относительно центра масс, меняется запас устойчивости по углам; атаки, крена, скольжения создавая на ранее сбалансированном «ЛА», неуравновешенные моменты по осям «Х,У,Z».
i. В традиционном способе обеспечения устойчивости по углу атаки на оси «Х» располагается; фокус «ХF1» на 25% «САХ», центр масс «ХТ1» хотя бы на 20% «САХ», потом при повороте крыла за счет перекачки топлива и смещения груза нужно центр масс переместить в точку «ХТ2», далее волновой кризис переместит фокус в точку «ХF3» 50% «САХ», при обратном повороте крыла операцию по перекачке топлива и смещению груза придется повторить в обратном порядке. Обеспечить центровки, и запаса устойчивости в таких параметрах технически весьма сложно.
ii. Альтернативный способ обеспечения устойчивости по углу атаки. Фокус располагается в «ХF1» на 25% «САХ», если не найдется профиль с более задней центровкой. «Центр масс» пустого самолета в точке «ХТ1», а во взлетной по оси «Х» от «ХТ3» до «ХF3» 50% «САХ», создавая отрицательный запас устойчивости по углу атаки «Хзу1».
Тогда пилотирование надо осуществлять не по углу тангажа, а по углу атаки. Летчик ручкой управления задает необходимый угол атаки, а автопилот по несложному алгоритму его сохраняет в некоторых пределах колебаний. Пилотировать без автоколебаний на этих режимах (с отрицательным запасом устойчивости) невозможно, но уменьшить амплитуды таких колебаний до незначительных- реально возможно. Там амплитуда будет зависеть от точности измерения угла атаки, времени запаздывания реакции автопилота, величины отрицательного запаса устойчивости, совершенства программы автопилота, и никак не будет зависеть от реакции и ошибок летчика. При повороте крыла «ﮮП=90°», путем порядка выработки и перекачки топлива «Центр масс» должен переместиться в точку «ХТ4» что при фокусе «F3» 50% «САХ» на «М>1» обеспечит достаточный положительный запас устойчивости по перегрузке и уберет все остальные неуравновешенные крутящие моменты. При возвращении на землю, пустой «ЛА» должен иметь центровку «ХТ1» и достаточный положительный запас устойчивости по углам атаки.
6) Система управления на примере крыла ромбовидного типа крыла (Фиг.4) включающую в себя:
a) Интерцепторы для разных конфигураций крыла.
b) 2 поворотных руля направления - (16) (Фиг.4.) С точки зрения их эффективности целесообразно использовать телескопически, по секционно выдвигающиеся, полностью поворотные, рули направления на верхней и нижней поверхностях крыла в зависимости от угла поворота крыла. Находящиеся на оси «Х», позади центра тяжести и на максимальном расстоянии от него. При повороте крыла по компьютерной программе рули направления поэтапно и полностью убираются в плоскость крыла.
a. При «ﮮП=0°» руль направления «Дозвуковой конфигурации» выдвинут полностью. Руль направления «Сверхзвуковой конфигурации» убран полностью. ( Фиг.1)
b. При «ﮮП=λ2» стреловидный руль направления «Сверхзвуковой конфигурации» полностью выдвигается, а «Дозвуковой» руль направления поэтапно и полностью убирается в крыло. ( Фиг.2)
c) Элевоны со всех 4 сторон «ЛА»; а1,а2,b1,b2,c1,c2,d1,d2- деталь (17) (Фиг.4) подчиняющуюся этим же «принципам симметрии» и «Τ(90)», каждая из сторон состоит как минимум из 2 независимо управляемых секций с возможностью фиксации определенного угла отклонения или отклонения в ограниченном диапазоне углов.
Функции элевонов, управляемых секций:
- Задние элевоны по оси «Х» управляют ЛА по крену и тангажу.
- Передние элевоны выполняют функции отклоняемых кромок крыла для получения «Кмах». В особых случаях, как дополнительные рули управления по крену и тангажу.
- Дополнительные функции элевонов; на взлете передние и задние элевоны выполняют роль взлетно-посадочной механизации, за счет резерва в углах отклонений.
В связи с изменением полетных конфигураций путем поворота крыла на 90 градусов вокруг оси «У», Фиг.4 для сохранения удовлетворительной управляемости необходима поэтапная смена функций элевонов, управляемых секций. В полете в зависимости от угла поворота крыла, «ﮮП=0-90°», элевоны (передние и задние) рулей высоты и крена (левые и правые), постепенно меняются своими функциями до достижения угла поворота «ﮮП=90°» согласно компьютерной программе:
a. «Дозвуковой конфигурация» «ﮮП=0°» Задние элевоны крена (d1 и c2), тангажа (d2 и c1), передние элевоны отклоняющихся кромок (а1 и а2, b1 и b2).
b. Поворот крыла на угол «ﮮП= λ2/2» Задними элевонами крена и тангажа станут (с1 и c2), а передними элевоны отклоняющихся кромок (а1 и а2).
c. Дальнейший поворот еще на угол «λ1/2», когда «ﮮП=λ2+λ1/2» Задними элевонами крена станут (с1 и b1), тангажа (с2 и b2), а передними элевоны отклоняющихся кромок (а1,а2,d1,d2) «Сверхзвуковой конфигурации». В случае необходимости можно задействовать элевоны передние кромки для балансировки системы управления «ЛА».
d) Перед поворотом крыла закончить изменение положение центра тяжести до среднего между дозвуковой и гиперзвуковой конфигурацией крыла. Во время поворота крыла на малом снижении уменьшить углы атаки (перегрузку) до минимально возможных, что уменьшит неуравновешенные крутящие моменты от взаиморасположения Фокуса и центра масс.
Не допускать перегрузок и очень быстрого роста числа «М» чтобы не возникали большие резкие неуравновешенные моменты по осям по осям «Х,У,Z», от неравномерного развития волнового кризиса, которые будет сложно парировать рулями управления.
e) «Автопилот» обоснование новых функций:
a. Автопилотный комплекс должен уметь решать следующие задачи;
- выполнять полет от взлета до посадки в автоматическом и полуавтоматическом режиме. В любой момент нажатием кнопки возвращаться к заданному в программе плану полета.
- на взлете сохранять заданный летчиком или программой взлетный угол атаки.
- набирать высоту на наивыгоднейшем угле атаки, с дублирующей системой контроля по наивыгоднейшей скорости (расчетной),
- гасить колебания до заданных значений, компенсировать динамическую и статическую неустойчивость на всех режимах полета и по всем осям,
- соблюдать порядок выработки топлива, управлять перекачкой топлива для заданного изменения положения точки центра масс.
- пилотировать на втором режиме полета при «ﮮП=90°» для гашения скорости и высоты при снижении с околоземных орбит полета,
В целях безопасности полетов:
b. Из-за большого диапазона высот и скоростей полета, переходных режимов требуется по программе для каждого режима ограничить максимально-разрешенные углы атаки, крена и скольжения, и их угловые скорости. Поэтому летчик даже при полном отклонении рулей не должен превысить заданные для этого режима полета угловые скорости, критические углы атаки, крена и скольжения, за счет создания компьютером неиспользуемого резерва углов отклонений каждой секции элевонов для каждого из режимов полета.
c. Во время смены функций системы управления креном и тангажом летательного аппарата, сохранять привычный для летчика способ управления размерами разрешенных угловых скоростей вокруг осей «Х, У, Z,».
d. Для обеспечения условий управляемости данным типом «ЛА» и лучшей натренированности летчика, быстрой наработки навыков при переучивании, усилия и углы отклонения ручки управления летательным аппаратом и педалями должны соответствовать определенным заданным угловым скоростям аэродинамическим осям «X,Y,Z» на всех летательных аппаратах по всем скоростям и высотам. Нужна единая для всех типов «ЛА» постоянная дифференциальную зависимость заданных угловых скоростей вращения крыла по всем аэродинамическим осям в зависимости от величин; отклонений рулей управления и потребных усилий.
7) Высотный полет этого типа «ЛА».
Известна формула подъемной силы Y= Cy 
G= Cyнв*( p *Vнв2*S)/2 где угол атаки Су, скорость полета Vпол могут быть наивыгоднейшими, а аэродинамическое качество максимальным «К(макс)». С ростом высоты уменьшается плотность воздуха «p», поэтому для пилотирования на «Vнв», для «К(макс)», нужно сохранять скоростной напор постоянным. Тогда снижение плотности воздуха из-за набора высоты должно компенсироваться пропорциональным ростом значения квадрата наивыгоднейшей скорости («Vнв2»). То есть с ростом высоты, потребная наивыгоднейшая скорость «Vнв» будет все время расти. (Фиг.1 Поз.1) Примерно на высоте Н=40- 60 км, «Vнв» достигнет определенного значения числа «М», где начнется волновой кризис с увеличения «Кмах». Здесь и начать поворот крыла до 90 градусов, изменяя угол стреловидности крыла, чтобы сохранить «К(макс)» от роста числа «М». (Поз.2) Тогда полный поворот крыла окончится до дальнейшего развития волнового кризиса на нижней поверхности крыла. Дальнейший разгон скорости в наборе высоты и преодоление неблагоприятных последствий; развития волнового кризиса в гиперзвуковой конфигурации при угле поворота крыла «ﮮП=90°». (Поз.3)
Такой полет после поворота крыла на 90 градусов в самом начале волнового кризиса обеспечат минимальные потери устойчивости и управляемости этого типа «ЛА». (Исключение составляют летательные аппараты с мотогондольными крыльями их потери устойчивости и управляемости будут еще меньше, поэтому возможны их полеты на промежуточных углах поворота крыла, с косым крылом.)
Большие площади крыла, полет на наивыгоднейшем угле атаки уменьшит расход топлива и переместит развитие волнового кризиса на большие высоты полета, где нагрев отдельных элементов конструкции ЛА от развития волнового кризиса окажется уже незначительным. Это позволит использовать больше легкие и не тугоплавкие материалы, сэкономить на теплозащите и располагать прямо на крыле солнечные панели для выработки электроэнергии.
4. Высотная Программа полета, для «ЛА» включает в себя;
1) - 1 этап; (Фиг.1 Поз.4,1) угол поворота крыла «ﮮП=0°» взлет на угле атаки взлетном, «Vвзл», с компенсацией статической и динамической неустойчивости по углу атаки за счет полуавтоматического или автоматического режима автопилота. Набор высоты за счет выдерживания наивыгоднейшего угла атаки «Vнв», и постоянного значения скоростного напора в диапазоне скоростей; наивыгоднейшей и наивыгоднейшей набора высоты, до достижения «Кмах» от числа «М», (начала волнового кризиса на верней поверхности крыла), заблаговременно начав изменять центровку «ЛА», чтобы уменьшить его разбалансировку из-за изменения положения фокуса при повороте крыла, (Фиг.4).
2) - 2 этап. (Поз.2). Примерно на высоте 40-60 км. Это самый опасный из-за изменения положения аэродинамического фокуса, перестройки системы управления и развития волнового кризиса.
a) Сохраняя «Кмах» от числа «М», изменять угол поворота крыла «ﮮП=0°-90°»,с изменением стреловидности крыла, с таким расчетом, чтобы при росте скорости сохранять «Кмах» от числа «М» за счет роста стреловидности крыла, не допуская перегрузок, больших углов атак и скольжения, снижаться до достижения угла поворота «ﮮП=90°». Тогда нерасчетного усиления влияния Волнового кризиса не будет. Далее набор высоты на «Vнв» за счет выдерживания постоянного значения скоростного напора в диапазоне уже сверхзвуковых скоростей; наивыгоднейшей и наивыгоднейшей набора высоты, (с учетом поправок изменений коэффициентов подъемной силы и сопротивления от числа «М», изменения веса летательного аппарата), до гиперзвуковых скоростей полета, (Фиг.1.Поз.2).
b) Переключения функций рулей крена и тангажа, рулей направления «ЛА» по осям «Х», «У», «Z» должна осуществляться по аналогичным программам, указанных в п.5.п.п. 5) и 6), на как можно большой высоте для снижения влияния волнового кризиса при смене рулей управления и с соответствующим изменением режима работы автопилота. Возможно, поворот крыла с разгоном скорости придется производить на около нулевых углах атаки. Самая безопасная перестройка систем управления будет при использовании мотогондольных крыльев управления.
c) Программная перестройкой системы устойчивости, (изменения центра масс «ЛА» за счет программы выработки и перекачки, перелива топлива, смещения положения груза).
3) -3 этап; ракетно-баллистический «ﮮП=90°», влияние атмосферы на волновой кризис, на нагрев и создание подъемной силы станет не существенным, ничтожным, и возможен только ракетный (с окислителем, рабочим телом) режим работы двигателя, разгон до необходимых космических скоростей и орбит, (Фиг.1 Поз.3.)
4) - 4 этап; снижение с орбиты, «ﮮП=90°», после импульсного торможения с выключенным двигателем, войти в высокие слои атмосферы на гиперзвуковой скорости, где пилотируя на докритических углах атаки, гасить скорость и высоту, используя второй режим полета, используя интерцепторы для выравнивания неуравновешенных крутящих моментов и уточнения захода на посадку, не допуская критических углов атаки, (Фиг.1 Поз.3).
5) -5 этап; после перехода на дозвуковую скорость с необходимым запасом высоты, перед заходом на посадку изменить угол поворота крыла до «ﮮП=0°», дозвуковой конфигурации, (Фиг.1 Поз.2)при необходимости уточнения расчета на посадку включить двигатель, (не используя полет на 2 режимах при «ﮮП=0°»), выпустить шасси и совершить посадку. (Фиг.1 Поз.1,4) Эта программа позволит за счет низких скоростей по отдельным высотам полета сэкономить; на топливе, теплозащите, снизить потерю устойчивости и управляемости летающего крыла, в полете на опасных переходных режимах.
Примечание: Возможна аварийная посадка на водную поверхность только при «ﮮП=90°» в «Сверхзвуковой или Гиперзвуковой конфигурации».
5. Общие недостатки этого типа «ЛА» и меры борьбы с ними:
1) Эта технология новая, сложная требует поэтапных испытаний крыла в различных режимах и планах крыла, симметричных профилей, модернизации автопилотных систем, нового типа датчиков углов атак, создания универсальных двигателей для всех высот и скоростей полета, накопления опыта.
2) Толстый профиль крыла создавая большие значения подъемной силы, склонен к резкому срыву потока, Симметричным по продольной оси «Z» профиль крыла с закруглением носовой и хвостовой части крыла еще ухудшит этот процесс.
Цитата из журнала «Авиапонорама» статья Валерия Вождаева «Профиль крыла обеспечивает аэродинамическое совершенство и малую ЭПР ЛА» При уменьшении радиуса закругления носка профиля сокращается линейный участок зависимости коэффициента подъемной силы Сy от угла атаки, что приводит к снижению Су, Крыло с любой формой срединной поверхности, которая обеспечит нулевой перепад давления на острой передней кромке, будет эквивалентно по аэродинамическому качеству крылу с плавно обтекаемой затупленной передней кромкой при одном угле атаки или при одном значении коэффициента подъемной силы.
Меры борьбы:
a). Запретить полет на втором режиме при угле поворота крыла 0 градусов. Для полетов на большой стреловидности, при сходе с орбиты земли на использовании аэродинамическом торможении это ограничение можно снять. Сделать режим торможения при снижении с орбиты только на угле поворота крыла 90 градусов.
b). Для уменьшения перетекания по задней закругленной кромке крыла, можно применить симметричную двояковыпуклость профиля крыла.
c. Использовать толстый профиль с острой отклоняющейся кромкой крыла по способу Валерия Вождаева сделав на передней кромке нулевой перепад давления на наивыгоднейшем угле атаки крыла.
3) На трансзвуковом развитии волнового кризиса, смещении фокуса, при повороте крыла с 0 до 90 градусов, в момент, когда устойчивость и управляемость снижены, даже при небольших увеличениях угла атаки и скольжения, могут возникнуть резкие скачки ударных волн, что может привезти к разнице подъемных сил на левой и правой части полу крыльев, и крутящему моменту по оси «Х» «Z», нежелательным и опасным колебательным процессам. При повороте крыла ухудшатся характеристики устойчивости и управляемости, создавая опасный режим полета.
Меры борьбы:
Поворот крыла до «ﮮП=90°» осуществлять на приросте «К(макс)» в начале волнового кризиса, не допуская его углубления, путем поворота крыла, изменения стреловидности. То есть разгон числа «М» должен быть на «К(макс)», и сопровождаться оптимальным ростом стреловидности крыла за счет его поворота крыла до «ﮮП=90°». В этом случае поворот крыла до «ﮮП=90°» должен закончится еще в самом начале волнового кризиса, чтобы уже в сверхзвуковой или гиперзвуковом конфигурации крыла продолжить преодолевать опасную фазу волнового кризиса. Там баланс сил восстановится. А небольшие возникающие крутящие моменты должны парироваться отклонением рулей управления до полного поворота крыла на 90 градусов.
4) Использование Геометрической крутки законцовок крыла нежелательно. Можно использовать симметричную вогнутость на нижней поверхности профиля. Использование вогнутого профиля крыла при повороте крыла станет отрицательной дозвуковой поперечной V(крыла).
5) Автопилоты не использовались, как система обеспечения статической и динамической устойчивости «ЛА», и для пилотирования по углу атаки.
6) При ракетно-баллистическом режиме, с подкрылевым размещением двигателей перед переходом к ракетно-маршевому режиму горячие газы от двигателей будут подходить близко к крылу, могут вызвать перегрев без фюзеляжного крыла, плохо влиять на другие двигатели.
Меры борьбы:
Устраняется отклонением вектора тяг двигателей в безопасные направления.
7) Большое удлинение крыла утяжелит вес продольных силовых элементов, (лонжеронов).
Меры борьбы:
Компенсировать равномерным распределением нагрузок по всей длине крыла и на всех режимах полета. Уменьшить эксплуатационные перегрузки до нормативов транспортной авиации.
Источники:
Л-1 Ригмант В. АНТ-20 «Максим Горький» // Авиация и космонавтика. 1997. №11-12. С.65-67.
Л-2 Котельников В. Пассажирский самолет ПС-124 // Авиация и космонавтика. 2011. №3 С.10-19.
Л-3 Матулевич Б. Гигант воздушного океана // Гражданская авиация. 1994. №6. С. 38-39.
Л-4 Котельников В. Эпоха гигантов // Авиамастер. 2004. №6. С. 20-22.
Л-5 «Аэродинамическая компоновка и характеристики летательных аппаратов.» Под общей редакцией М.И. Ништа. М. Машиностроение, 1991, с. 154/.
Л-6 Бауэрс П. Летательные аппараты нетрадиционных схем: Пер. с англ. -М.: Мир, 1991. -320 с., ил.
Л-7 Павлов С.Н., Марков С.И., Семёнов А.Г. Концепция сверхзвукового пассажирского самолёта средней дальности с крылом ассиметрично изменяемой стреловидности. // XXIX Неделя науки СПбГПУ. Ч.II: Материалы межвузовской научной конференции. СПб.: Изд-во СПбГПУ, 2001, 101 с. -С. 46 -47.
Л-8 Павлов С.Н., Марков С.И., Семёнов А.Г. Концепция истребителя-бомбардировщика с крылом ассиметрично изменяемой стреловидности. // XXIX Неделя науки СПбГПУ. Ч.II: Материалы межвузовской научной конференции. СПб.: Изд-во СПбГПУ, 2001, 101 с. - С. 46-47.
Л-9 Сайт Федерального института промышленной собственности.
| название | год | авторы | номер документа |
|---|---|---|---|
| Водно-воздушное транспортное средство | 2021 |
|
RU2785913C2 |
| Способ подготовки дистанционных боевых действий | 2023 |
|
RU2812501C1 |
| КОСМИЧЕСКИЙ АППАРАТ ДЛЯ СПУСКА С ОРБИТЫ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ И СПОСОБ ЕГО СПУСКА С ОРБИТЫ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ | 2005 |
|
RU2334656C2 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2005 |
|
RU2288140C1 |
| Сверхзвуковой летательный аппарат. | 2015 |
|
RU2613747C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2014 |
|
RU2577824C1 |
| ДВУХСТУПЕНЧАТАЯ АЭРОКОСМИЧЕСКАЯ СИСТЕМА /ВАРИАНТЫ/ | 2012 |
|
RU2529121C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ (ВАРИАНТЫ) | 2012 |
|
RU2486105C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2012 |
|
RU2495796C1 |
| Универсальный реактивный двигатель (УРД) | 2019 |
|
RU2754976C2 |
Летательный аппарат аэродинамической схемы летающее крыло содержит крыло толстого профиля, предназначенное для полета, имеющее продольную и поперечную оси, образующее конфигурацию для полета на дозвуковой скорости и конфигурацию для полета на гиперзвуковой скорости, двигатели и средства управления. Крыло выполнено с возможностью для полета на дозвуковой скорости в направлении поперечной оси крыла и с возможностью для полета на гиперзвуковой скорости в направлении продольной оси крыла. Крыло выполнено с возможностью уменьшения относительной толщины профиля и радиусов закруглений кромок крыла, удлинения крыла, увеличения стреловидности по передним кромкам и сужения крыла. Изобретение направлено на расширение арсенала технических средств. 7 з.п. ф-лы, 4 ил.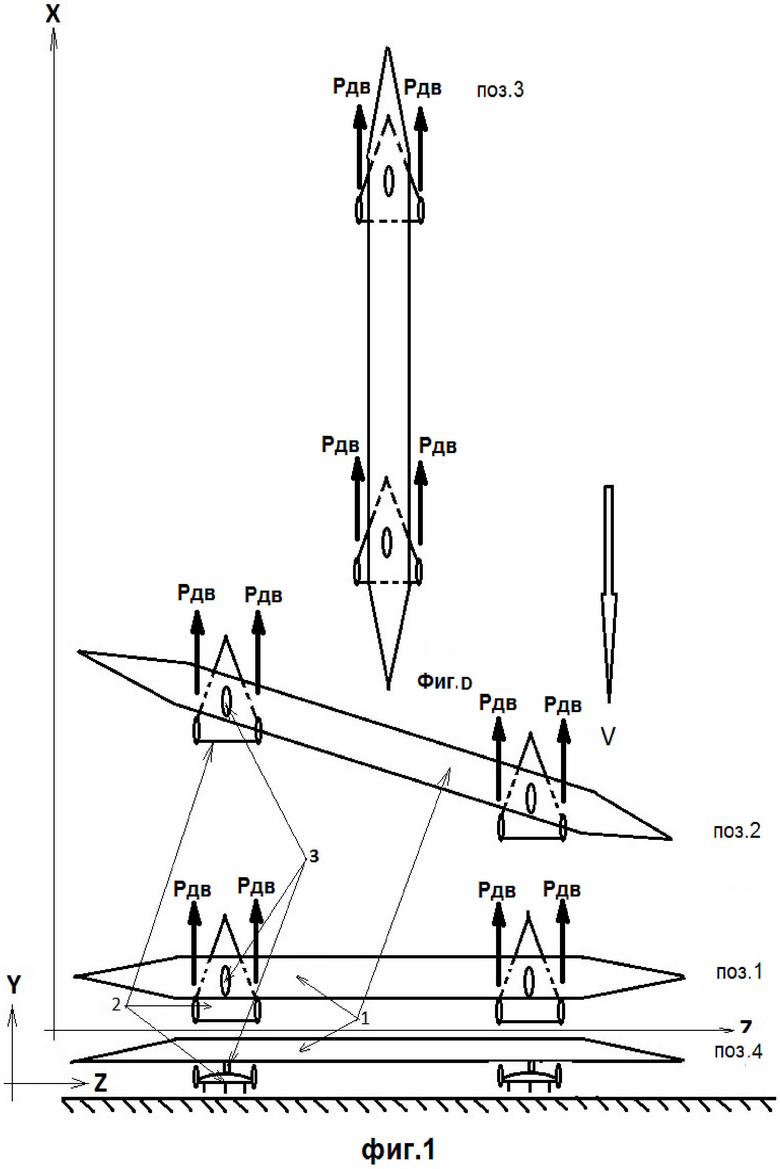
1. Летательный аппарат аэродинамической схемы летающее крыло, содержащий крыло толстого профиля, предназначенное для полета, имеющее продольную и поперечную оси, образующее конфигурацию для полета на дозвуковой скорости и конфигурацию для полета на гиперзвуковой скорости, двигатели и средства управления, упомянутое крыло выполнено с возможностью для полета на дозвуковой скорости в направлении поперечной оси крыла и с возможностью для полета на гиперзвуковой скорости в направлении продольной оси крыла, отличающийся тем, что крыло выполнено с возможностью уменьшения относительной толщины профиля и радиусов закруглений кромок крыла, удлинения крыла, увеличения стреловидности по передним кромкам и сужения крыла.
2. Летательный аппарат по п.1, отличающийся тем, что он снабжен поворотными механизмами для поворота двигателей относительно крыла, или двигатели выполнены с возможностью поворота вектора тяги до 90 градусов, либо по крайней мере не менее двух двигателей выполнены с возможностью создать векторы тяги вдоль продольной и поперечной осей.
3. Летательный аппарат по п.1, отличающийся тем, что крыло имеет симметрию по линиям продольной (Х) и поперечной (Z) осей, включая продольную симметрию по осям линии в 50% Средней Аэродинамической Хорды профиля крыла в плане.
4. Летательный аппарат по п.1, отличающийся тем, что в зависимости от модификации может быть предназначен для полетов с промежуточным углом поворота крыла от 0 до 90 градусов относительно оси (Y).
5. Летательный аппарат по п.1, отличающийся тем, что крыло имеет убирающиеся рули направления и сменные функции элевонов.
6. Летательный аппарат по п.1, отличающийся тем, что он снабжен автопилотом для полета по заданным углам атаки на дозвуковой скорости и на гиперзвуковой скорости полета.
7. Летательный аппарат по п.1, отличающийся тем, что он снабжен автопилотом, который выполнен с возможностью компенсировать возникающие динамическую и статическую неустойчивость путем гашения больших амплитуд автоколебаний при отрицательных запасах устойчивости по углу атаки, крена и скольжения.
8. Летательный аппарат по п.1, отличающийся тем, что для полета на гиперзвуковой скорости преимущественно используются в дозвуковой конфигурации формы крыла в плане с острой его законцовкой, которая в гиперзвуковой конфигурации станет головным гиперзвуковым обтекателем.
| US 0004836470 A1, 06.06.1989 | |||
| US 20120037751 A1, 16.02.2012 | |||
| RU 2006141575 A, 27.05.2008. |

