Изобретение относится к электротехнике, к электромагнитным механизмам, а конкретно к бесконтактным магнитным редукторам, и может быть использовано в качестве передаточного устройства в механических системах с большим ресурсом работы при ударных нагрузках. Изобретение так же относится к общему машиностроению и может быть использовано для передачи крутящего момента с бесконтактным взаимодействием звеньев для снижения уровня шума и вибраций в условиях отсутствия смазки.
Магнитный редуктор мы решили делать по распространенной схеме, которая представляет собой аналог планетарного редуктора. Магниты в центре являются «солнечной шестерней», магниты снаружи - «зубчатый венец (эпицикл)», между ними зубцы из магнитомягкого материала выполняют роль «водила».
Так, известен магнитный редуктор, содержащий статор, являющийся внешним ротором, связанным с выходным валом и который несет на поверхности внутренней стенки ряд дистантно расположенных вдоль оси его вращения постоянных магнитов, быстроходный ротор 3 расположенный коаксиально статору и связанный с входным валом и который несет на наружной поверхности ряд дистантно расположенных вдоль оси его вращения постоянных магнитов, а между статором и быстроходным ротором коаксиально им расположен тихоходный ротор, являющийся модулятором и на наружной поверхности которого размещены дистантно расположенные вдоль оси его вращения постоянные магниты (US 2011037333, H02K 7/11, опубл. 21.04.2015).
Недостаток данного решения заключается в том, что для повышения выходной мощности приходится увеличивать размеры постоянных магнитов, в частности увеличивать их длину вдоль оси вращения редуктора. А это приводит к увеличению габаритов и веса самого редуктора.
В настоящее время магнитные редукторы рассматриваются как перспективные к использованию, так как не требуют смазки, отсутствует трение и т.д. Но их размеры не всегда вписываются в встраиваемый объект. А недостаточная мощность на выходе становится в дополнение к габаритам препятствием для широкого использования этого типа редукторов в конструкциях приводов.
Настоящее изобретение направлено на достижение технического результата, заключающегося в повышении выходного вращающего момента при сохранении весо-габаритных показателей.
Указанный технический результат достигается тем, что в магнитном редукторе, содержащем статор, являющийся внешним ротором, связанным с выходным валом и который несет на поверхности внутренней стенки ряд дистантно расположенных вдоль оси его вращения постоянных магнитов, быстроходный ротор расположенный коаксиально статору и связанный с входным валом и который несет на наружной поверхности ряд дистантно расположенных вдоль оси его вращения постоянных магнитов, а между статором и быстроходным ротором коаксиально им расположен тихоходный ротор, являющийся модулятором и на наружной поверхности которого размещены дистантно расположенные вдоль оси его вращения постоянные магниты, отличающийся тем, что постоянные магниты на тихоходном роторе расположены под углом к оси его вращения и наклонно к поверхности, на которой они закреплены.
Указанные признаки являются существенными и взаимосвязаны с образованием устойчивой совокупности существенных признаков, достаточной для получения требуемого технического результата.
Настоящее изобретение поясняется конкретным примером исполнения, который, наглядно демонстрирует возможность достижения требуемого технического результата.
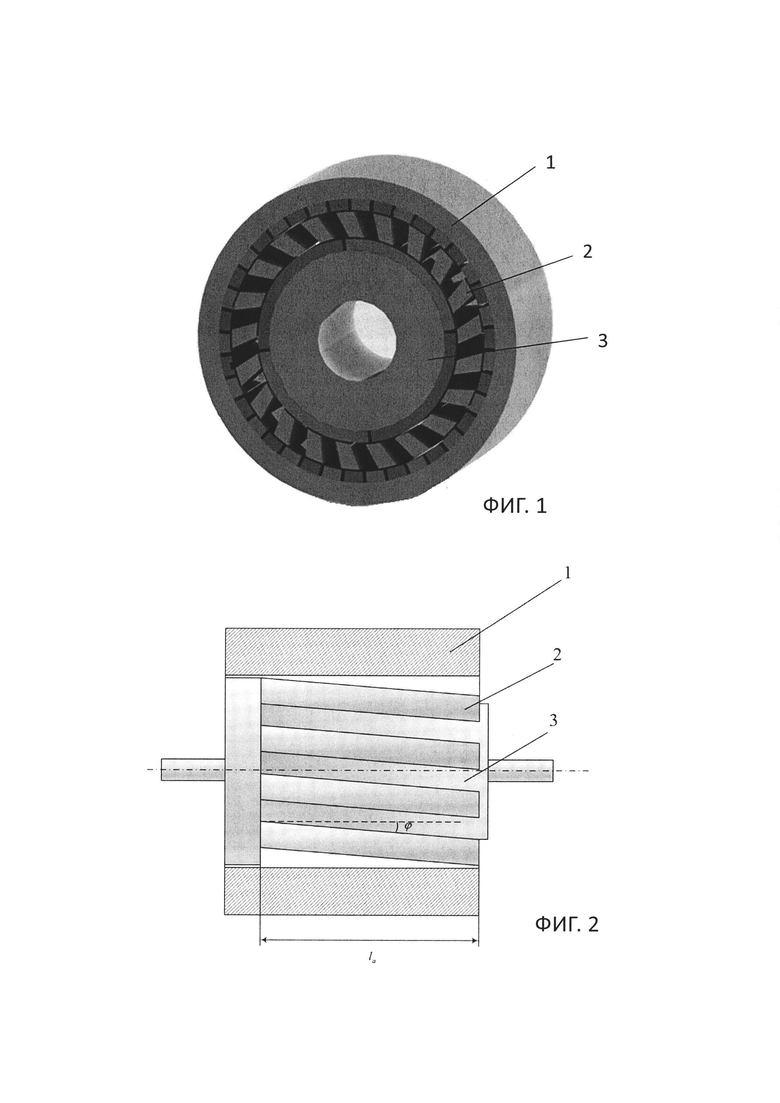
На фиг. 1 - общий вид магнитного редуктора, вид в 3D проекции;
фиг. 2 - сечение на плоскости фрагмента магнитного редуктора;
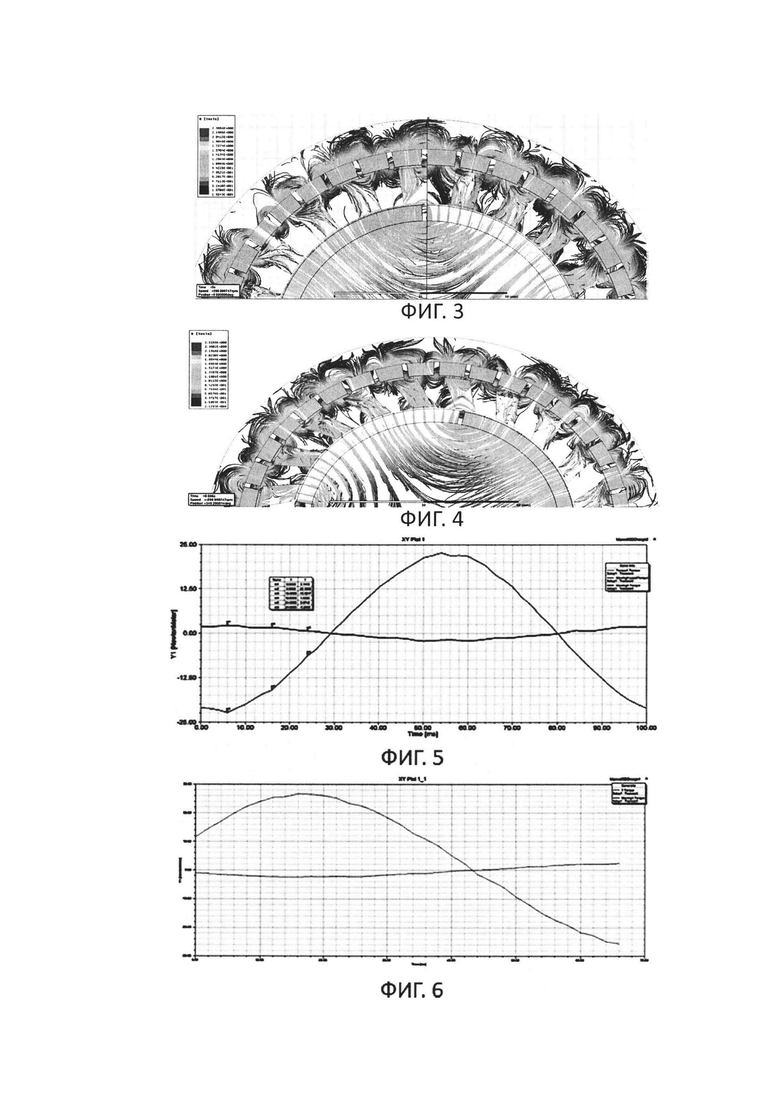
фиг. 3 - демонстрация картины магнитного поля магнитного редуктора по прототипу;
фиг. 4 - демонстрация картины магнитного поля магнитного редуктора согласно изобретения;
фиг. 5 - представлен график выходного и входного вращающих моментов магнитного редуктора по прототипу;
фиг. 6 - представлен график выходного и входного вращающих моментов магнитного редуктора согласно изобретения.
Согласно изобретения предлагается разработка магнитного редуктора, а именно бесконтактный магнитный преобразователь и может быть использован в качестве передаточного устройства в механических системах с большим ресурсом работы при ударных нагрузках. Суть применения магнитного редуктора связано с улучшением характеристик магнитного редуктора, которые позволяют облегчить его изготовление и улучшить удельные энергетические характеристики.
Особенностью магнитного редуктора является измененная геометрия модулятора, которая имеет скошенное исполнение как в радиальном, так и в осевом направлении.
Технический результат достигается применением ферромагнитного модулятора скошенного исполнения и расположение постоянных магнитов под углом к оси вращения.
Магнитный редуктор (фиг. 1) представляет собой устройство, состоящее из трех основных звеньев: статора 1, тихоходного ротора, являющегося модулятором 2, и быстроходного ротора 3. Статор 1, являющийся внешним ротором, может быть связан с выходным валом и несет на поверхности внутренней стенки ряд дистантно расположенных вдоль оси его вращения постоянных магнитов. Эти постоянные магниты условно выполнены в виде брусков параллелепипедной формы, расположенных строго вдоль оси вращения статора 1.
Быстроходный ротор 3 расположен коаксиально статору 1 и несет на наружной поверхности ряд дистантно расположенных вдоль оси его вращения постоянных магнитов. Быстроходный ротор 3 связан с входным валом. Эти постоянные магниты условно выполнены в виде брусков параллелепипедной формы, расположенных строго вдоль оси вращения статора 1. Эти постоянные магниты условно выполнены в виде брусков параллелепипедной формы, расположенных строго вдоль оси ротора 3.
Между статором и быстроходным ротором коаксиально им расположен тихоходный ротор, являющийся модулятором 2, на наружной поверхности которого размещены дистантно расположенные вдоль оси его вращения постоянные магниты. При этом эти магниты условно выполнены в виде брусков параллелепипедной формы и расположены вдоль оси вращения модулятора 2.
В этой части магнитный редуктор повторяет классическую схему магнитных редукторов, в том числе и конструкцию по прототипу.
Особенностью заявленного изобретения является новая схема расположения постоянных магнитов на наружной поверхности тихоходного ротора (фиг. 1 и 2). Бруски постоянных магнитов расположены под углом к оси вращения модулятора и наклонно к поверхности, на которой они закреплены. При таком исполнении постоянных магнитов увеличивается их длина и соответственно поле взаимодействия с магнитами других элементов редуктора.
Вращающий момент внешнего ротора управления является результатом взаимодействия магнитного потока на тихоходном роторе и эквивалентного поверхностного тока на внешнем роторе управления и может быть записан следующим выражением:

где R - радиус;  - длина активной части магнитного редуктора.
- длина активной части магнитного редуктора.

где p2 - число пар полюсов внешнего ротора управления; pk - число ферромагнитных сегментов на тихоходном звене; p3 - число пар полюсов быстроходного ротора;  - амплитудное значение момента, которое выражается соотношением:
- амплитудное значение момента, которое выражается соотношением:

где  ,
,  - амплитуда второй и третьей гармоники МДС; ϕ - угловое смещение сегментов модулятора относительно оси вращения быстроходного звена магнитного редуктора.
- амплитуда второй и третьей гармоники МДС; ϕ - угловое смещение сегментов модулятора относительно оси вращения быстроходного звена магнитного редуктора.
Из анализа данного уравнения следует, что  зависит от геометрических размеров и соответствующих роторов редуктора и свойств магнитов и модулятора.
зависит от геометрических размеров и соответствующих роторов редуктора и свойств магнитов и модулятора.
Изменение формы модулятора позволило повысить длину его активной части  без изменения его габаритов. Это позволяет повысить выходной вращающий момент и обеспечить по сравнению с традиционным исполнением модулятора более высокое значение выходного момента.
без изменения его габаритов. Это позволяет повысить выходной вращающий момент и обеспечить по сравнению с традиционным исполнением модулятора более высокое значение выходного момента.
Магнитный редуктор работает следующим образом. Постоянные магниты 1 ротора быстрого вращения и полюсные наконечники 2 создают в рабочих зазорах синусоидально распределенную магнитную индукцию. Максимальное по модулю значение магнитной индукции достигается посередине полюсных наконечников. В рабочих зазорах напротив середин постоянных магнитов радиальная составляющая магнитной индукции равна нулю.
При вращении ротора быстрого вращения со скоростью 001 волна магнитной индукции вращается с той же угловой скоростью. При этом полые магниты, связанные с тихоходным ротором, при отсутствии момента нагрузки будут занимать положение, при котором в зоне максимума модуля магнитной индукции эти магниты занимают угловое положение, совпадающее с угловым положением магнитов на магнитопроводе статора 1. При повороте быстроходного ротора на одно полюсное деление тихоходный ротор также повернется на одно деление. Работа заявленного магнитного редуктора не отличается от алгоритма работы классического магнитного редуктора и редуктора по прототипу.
Но мощностные параметры магнитного редуктора зависят от длины активной части модулятора. Увеличение этой длины прямо связано с увеличением размеров по длине постоянных магнитов, но это приводит к увеличению габаритов редуктора и его веса. Для сохранения габаритов и веса устройства предложено изменить схему расположения постоянных магнитов на наружной поверхности модулятора - не вдоль оси вращения, а с поперечным смещением под наклоном к наружной поверхности, на которой они закреплены, и под углом к оси вращения модулятора. При таком исполнении длина каждого постоянного магнита увеличивается, что создает увеличенную по длине активную часть модулятора.
Были изготовлены два опытных образца: первый - классическая схема магнитного редуктора с расположением всех постоянных магнитов вдоль оси вращения элементов редуктора, второй - согласно изобретению, в котором постоянные магниты на тихоходном роторе расположены с поперечным смещением под наклоном к наружной поверхности, на которой они закреплены, и под углом к оси вращения модулятора. Оба редуктора имели совпадающие размеры по габаритам и практически одинаковый вес.
Были сделаны снимки распределения магнитных полей у редуктора классической конструкции (фиг. 3) и редуктора с модифицированным модулятором (фиг. 4). Из снимков видно, что насыщенность магнитного поля на фиг. 4 существенно выше аналогичной картины распределения магнитных вихрей на фиг. 3. Это указывает на то, что на выходном элементе редуктора реализуется больший по величине выходной вращающий момент (примерно на 10-15%). Проведенные расчеты, результаты которых представлена на графиках на фиг. 5 и 6 (соответственно, для редуктора классической конструкции и для редуктора с модифицированным модулятором) расчеты подтвердили реальное увеличение выходного вращающего момента на 10-15%. Кривая, исходящая из нулевой координаты и простирающаяся примерно горизонтально показывает входной момент, а дугооборазная кривая показывает изменение выходного момента.
Настоящее изобретение промышленно применимо и может быть реализовано на предприятиях общего машиностроения как механизм для передачи крутящего момента с бесконтактным взаимодействием звеньев для снижения уровня шума и вибраций в условиях отсутствия смазки. Изменение схемы расположения постоянных магнитов на тихоходном роторе, выполняющем функцию модулятора, позволяет без увеличения габаритных размеров самого редуктора повысить выходной вращающий момент.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТНАЯ ПЕРЕДАЧА (ВАРИАНТЫ) И ЭЛЕКТРОГЕНЕРАТОР, СОДЕРЖАЩИЙ МАГНИТНУЮ ПЕРЕДАЧУ | 2022 |
|
RU2794076C1 |
| Магнитный редуктор | 2017 |
|
RU2651335C1 |
| Вентильный двигатель индукторного типа со встроенным магнитным редуктором | 2023 |
|
RU2818789C1 |
| Планетарный магнитный редуктор | 2018 |
|
RU2699238C1 |
| Тихоходный вентильный двигатель индукторного типа со встроенным магнитным редуктором | 2021 |
|
RU2787007C1 |
| Электромагнитная передача с катящимся ротором | 2021 |
|
RU2768365C1 |
| МАГНИТОЭЛЕКТРИЧЕСКИЙ ВЕНТИЛЬНЫЙ ДВИГАТЕЛЬ СО ВСТРОЕННЫМ МАГНИТНЫМ РЕДУКТОРОМ (ВАРИАНТЫ) | 2018 |
|
RU2704239C1 |
| Электромагнитный редуктор | 2019 |
|
RU2717820C1 |
| ЭЛЕКТРОМАГНИТНЫЙ РЕДУКТОР | 2016 |
|
RU2630482C1 |
| СТАТОРНЫЙ МАГНИТНЫЙ РЕДУКТОР-МУЛЬТИПЛИКАТОР УЗЯКОВА С ВНУТРЕННИМ ЗАЦЕПЛЕНИЕМ | 2017 |
|
RU2654656C1 |
Изобретение относится к области электротехники. Технический результат - повышение выходного вращающего момента. Магнитный редуктор содержит статор, являющийся внешним ротором, связанным с выходным валом, который несет на поверхности внутренней стенки ряд дистантно расположенных вдоль оси его вращения постоянных магнитов, быстроходный ротор, расположенный коаксиально статору и связанный с входным валом, который несет на наружной поверхности ряд дистантно расположенных вдоль оси его вращения постоянных магнитов. Между статором и быстроходным ротором коаксиально им расположен тихоходный ротор, являющийся модулятором, на наружной поверхности которого размещены дистантно расположенные вдоль оси его вращения постоянные магниты. При этом постоянные магниты на тихоходном роторе расположены под углом к оси его вращения и наклонно к поверхности, на которой они закреплены. 6 ил.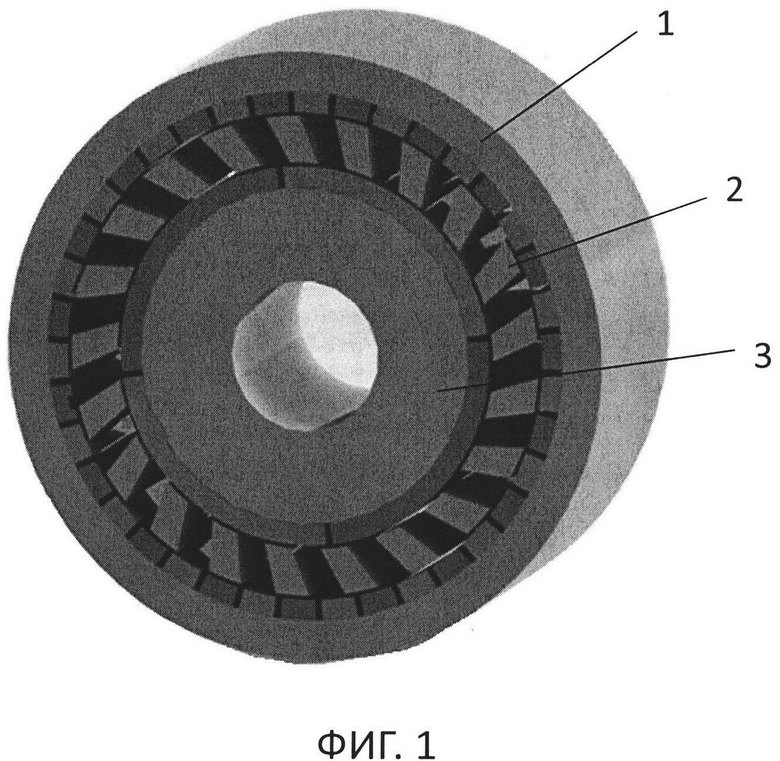
Магнитный редуктор, содержащий статор, являющийся внешним ротором, связанным с выходным валом и который несет на поверхности внутренней стенки ряд дистантно расположенных вдоль оси его вращения постоянных магнитов, быстроходный ротор расположенный коаксиально статору и связанный с входным валом и который несет на наружной поверхности ряд дистантно расположенных вдоль оси его вращения постоянных магнитов, а между статором и быстроходным ротором коаксиально им расположен тихоходный ротор, являющийся модулятором, и на наружной поверхности которого размещены дистантно расположенные вдоль оси его вращения постоянные магниты, отличающийся тем, что постоянные магниты на тихоходном роторе расположены под углом к оси его вращения и наклонно к поверхности, на которой они закреплены.
| US 2011037333 A1, 17.02.2011 | |||
| WO 2007125284 A1, 08.11.2007 | |||
| МАГНИТНЫЙ РЕДУКТОР | 2011 |
|
RU2474033C1 |
| СООСНЫЙ МАГНИТНЫЙ РЕДУКТОР-МУЛЬТИПЛИКАТОР УЗЯКОВА | 2015 |
|
RU2579443C2 |
| ЭЛЕКТРОМАГНИТНЫЙ ДВИГАТЕЛЬ (ВАРИАНТЫ) | 2000 |
|
RU2176845C1 |
| Двигатель внутреннего горения с предкамерой и камерой для сжатия добавочного количества воздуха | 1932 |
|
SU35487A1 |
| Индуктор электрической машины | 1987 |
|
SU1510050A1 |

