Изобретение относится к автоматике и вычислительной технике и может быть использовано в робототехнических комплексах военного назначения, состоящих из группы подвижных объектов (ПО) с централизованной системой управления в условиях функционирования космической разведки.
Известно устройство, содержащее k+1 запоминающих устройств, блок сравнения, k цифроаналоговых преобразователей, схему управления, регистр, счетчик, селектор, k формирователей колоколообразных импульсов, сумматор, преобразователь напряжения - ток и генератор тактовых импульсов [1]. Недостатком устройства являются относительно узкие функциональные возможности.
Наиболее близким к заявляемому устройству является устройство, содержащее первый генератор пуассоновских импульсов, второй генератор пуассоновских импульсов, генератор тактовых импульсов, элемент ИЛИ, первый элемент И, второй элемент И, первый счетный триггер, второй счетный триггер, элемент НЕ, при этом выход первого генератора пуассоновских импульсов соединен с первым входом элемента ИЛИ, выход которого соединен с входом первого счетного триггера, выход которого соединен с первым входом второго элемента И и входом элемента НЕ, выход которого соединен с первым входом первого элемента И, выход которого соединен с вторым входом элемента ИЛИ, выход второго элемента И соединен с входом генератора 3 тактовых импульсов, выход которого соединен с третьим входом элемента ИЛИ, выход второго генератора пуассоновских импульсов соединен с входом второго счетного триггера, выход которого соединен со вторыми входами первого элемента и второго элемента И [2].
Недостатком наиболее близкого технического решения являются относительно узкие функциональные возможности, не позволяющие определять оптимальные значения параметров процесса передвижения группы подвижных объектов.
Требуемый технический результат - расширение функциональных возможностей путем обеспечения возможности определять оптимальные значения параметров процесса передвижения группы подвижных объектов.
Требуемый технический результат достигается тем, что в устройство, содержащее первый генератор пуассоновских импульсов, первый элемент И, второй элемент И, элемент ИЛИ, генератор тактовых импульсов, элемент НЕ, второй генератор пуассоновских импульсов и счетный триггер введены блок из n счетных триггеров, второй элемент НЕ, третий элемент НЕ, третий элемент И, сумматор, блок сравнения, блок ввода значения интенсивности и блок изменения интенсивности, при этом выход блока ввода значения интенсивности соединен с входом первого генератора пуассоновских импульсов, n выходов которого соединены с первым входом элемента ИЛИ, n выходов которого соединены с входом блока из n счетных триггеров, n выходов которого соединены с входом третьего элемента НЕ, первым входом второго элемента И и входом первого элемента НЕ, выход которого соединен с первым входом первого элемента И, выход первого элемента И соединен со вторым входом элемента ИЛИ, выход второго элемента И соединен с входом генератора тактовых импульсов, выход которого соединен с третьим входом элемента ИЛИ, n выходов третьего элемента НЕ соединены с входом третьего элемента И, n выходов которого соединены со входом сумматора, выход сумматора соединен со входом блока сравнения, при этом выход блока сравнения соединен с блоком изменения интенсивности, выход которого соединен с блоком ввода интенсивности, выход второго генератора пуассоновских импульсов соединен с входом счетного триггера, первый выход которого соединен со вторым элементом НЕ, выход которого соединен со вторым входом первого элемента И, второй выход счетного триггера соединен со вторым входом второго элемента И, третий выход - со вторым входом третьего элемента И.
Предлагаемое техническое решение может быть реализовано с помощью известных элементов цифровой техники, следовательно, оно отвечает критерию промышленной применимости.
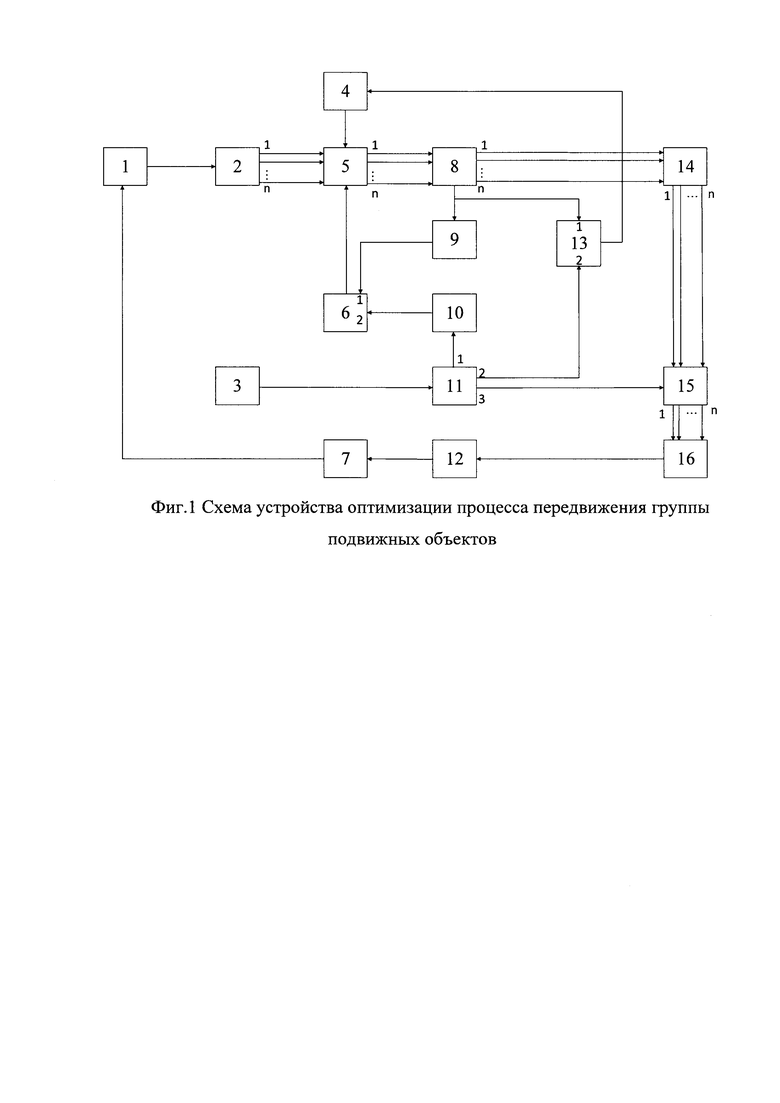
На чертеже представлена структурная схема устройства оптимизации процесса передвижения группы подвижных объектов (фиг. 1).
Устройство оптимизации процесса передвижения группы подвижных объектов содержит блок ввода интенсивности 1 первый генератор 2 пуассоновских импульсов, второй генератор 3 пуассоновских импульсов, генератор 4 тактовых импульсов, элемент ИЛИ 5, первый элемент И 6, блок изменения интенсивности 7, блок из n счетных триггеров 8, первый элемент НЕ 9, второй элемент НЕ 10, счетный триггер 11, блок сравнения 12, второй элемент И 13, третий элемент НЕ 14, третий элемент И 15, сумматор 16, при этом выход блока ввода значения интенсивности соединен с входом первого генератора 2 пуассоновских импульсов, n выходов которого соединены с первым входом элемента ИЛИ 5, n выходов которого соединены с входом блока 8 из n счетных триггеров, n выходов которого соединены с входом третьего элемента НЕ 14, первым входом второго элемента И 13 и входом первого элемента НЕ 9, выход которого соединен с первым входом первого элемента И 6. Выход первого элемента И 6 соединен со вторым входом элемента ИЛИ 5. Выход второго элемента И 13 соединен с входом генератора 4 тактовых импульсов, выход которого соединен с третьим входом элемента ИЛИ 5. n выходов третьего элемента НЕ 14 соединены с входом третьего элемента И 15, n выходов которого соединены со входом сумматора 16. Выход сумматора 16 соединен со входом блока 12 сравнения, при этом выход блока 12 сравнения соединен с блоком 7 изменения интенсивности, выход которого соединен с блоком 1 ввода интенсивности. Выход второго генератора 3 пуассоновских импульсов соединен с входом счетного триггера 11, первый выход которого соединен со вторым элементом НЕ 10, выход которого соединен со вторым входом первого элемента И 6; второй выход счетного триггера 11 соединен со вторым входом второго элемента И 13, третий выход - со вторым входом третьего элемента И 15.
Работает устройство оптимизации процесса передвижения группы подвижных объектов следующим образом.
Оптимизация процесса передвижения группы подвижных объектов производится посредством выбора оптимального значения параметров, определяющих порядок передвижения группы подвижных объектов, на основе моделирования функционирования группы однородных подвижных объектов.
При моделировании функционирования группы однородных подвижных объектов предполагается, что для повышения скрытности за счет создания неопределенности своего местоположения, группа подвижных объектов периодически перемещается в области функционирования. То есть в процессе функционирования каждый из подвижных объектов в группе может находиться в одном из состояний: {0 - стоит, 1 - двигается}.
Для затруднения прогнозирования состояния группы подвижных объектов во времени, необходимо организовать процесс смены позиций таким образом, чтобы обеспечить скрытное функционирование требуемого количества объектов в группе (не менее k объектов из n), при этом минимизировать количество передвижения объектов (с целью сохранения их моторесурса).
Также предполагается, что объекты могут изменять свое состояние (начинать движение либо останавливаться на позиции) в зависимости от того, осуществляется в данный момент их наблюдение системой разведки или нет.
Порядок смены позиций определяется параметром  - интенсивность смены состояния подвижного объекта (величина обратная среднему времени нахождения на позиции).
- интенсивность смены состояния подвижного объекта (величина обратная среднему времени нахождения на позиции).
Время пребывания каждого из объектов на позиции в данном случае будет являться случайной величиной, распределенной по показательному закону в параметром  .
.
Функционирование группы однородных подвижных объектов осуществляется в условиях воздействия системы космической разведки, предназначенной для установления местонахождения каждого ПО в группе, которая может находиться в одном из двух состояний {0 - не проводит разведку по обнаружению подвижного объекта, 1 - проводит разведку по обнаружению подвижного объекта}.
При моделировании процесса разведки по обнаружению местоположения каждого ПО введено допущение, что моменты обнаружения ПО во времени распределены по показательному закону. Параметры распределения определяются составом группировки разведывательных средств, например, их количеством.
Изменение состояний каждого ПО в группе происходит в случайные моменты времени, а в зависимости от того, в каком состоянии находится система разведки, дополнительно принимается решение об изменении текущего состояния каждого ПО.
Алгоритм смены состояний ПО в районе дислокации при функционировании разведывательной системы можно представить следующим образом:
- если ПО стоит и разведывательная система не проводит разведку по обнаружению ПО, то ПО стоит;
- если ПО стоит и разведывательная система проводит разведку по обнаружению ПО, то ПО стоит;
- если ПО движется и разведывательная система не проводит разведку по обнаружению ПО, то ПО движется;
- если ПО движется и разведывательная система проводит разведку по обнаружению ПО, то ПО стоит;
- если разведывательная система прекращает проводить разведку по обнаружению ПО, то ПО начинает двигаться.
Подвижный объекты считается обнаруженным, если он стоит и наблюдается системой разведки противника.
Количество обнаруженных объектов в группе находится в зависимости от значения параметра  - интенсивности смены состояний подвижных объектов.
- интенсивности смены состояний подвижных объектов.
Предлагается проводить оценивание количества обнаруженных объектов для текущего значения интенсивности смены состояний подвижных объектов, и если количество не обнаруженных объектов меньше k, увеличивать интенсивность смены состояния подвижных объектов на заданный шаг  , после чего повторно проводить моделирование и оценку результатов функционирования группы однородных подвижных объектов. Процесс повторяется итерационно, до обеспечения требуемой эффективности функционирования группы однородных подвижных объектов - обеспечения скрытного функционирования не менее k объектов.
, после чего повторно проводить моделирование и оценку результатов функционирования группы однородных подвижных объектов. Процесс повторяется итерационно, до обеспечения требуемой эффективности функционирования группы однородных подвижных объектов - обеспечения скрытного функционирования не менее k объектов.
Величина полученного параметра  считается оптимальным способом управления процессом передвижения группы подвижных объектов.
считается оптимальным способом управления процессом передвижения группы подвижных объектов.
Указанная последовательность оптимизации процесса передвижения группы подвижных объектов реализуется следующим образом.
В начальном состоянии в блоке ввода интенсивности 1 введено текущее (начальное) значение параметра  , в блоке сравнения 12 задано требуемого количество не обнаруженных объектов k, блок из n счетных триггеров 8, второй счетный триггер 11 находятся в состоянии логического нуля.
, в блоке сравнения 12 задано требуемого количество не обнаруженных объектов k, блок из n счетных триггеров 8, второй счетный триггер 11 находятся в состоянии логического нуля.
При запуске устройства от внешнего источника, не показанного на чертеже, в первом генераторе 2 пуассоновских импульсов и втором генераторе 3 пуассоновских импульсов возникают импульсы, в случайные моменты, соответствующие пуассоновскому распределению, которые соответствуют экспоненциальному распределению интервалов времени между сменой состояний каждого из n подвижных объектов.
Импульс из первого генератора 2 пуассоновских импульсов проходит через элемент ИЛИ 5 и переводит счетные триггеры в блоке 8 из нулевого состояния в единичное состояние и наоборот. Импульс из второго генератора 3 пуассоновских импульсов переводит счетный триггер 11 из нулевого состояния в единичное состояние и наоборот. Состояние n счетных триггеров в блоке 8 описывает состояние группы ПО, а состояние счетного триггера 11 описывает состояние системы космической разведки.
Генератор тактовых импульсов 4, элемент И 6, первый элемент НЕ 9, второй элемент НЕ 10, элемент И 13 реализуют описанный выше алгоритм смены состояний ПО в районе дислокации в зависимости от смены состояний разведывательной системы противника.
Если i-й элемент блока счетных триггеров 8 находится в единичном состоянии и счетный триггер 11 переходит в единичное состояние, элемент И 13 выдает единичный сигнал и инициализирует генератор тактовых импульсов 4, который в свою очередь вызывает смену состояния и i-гo элемента блока счетных триггеров 8. Этому соответствует ситуация, когда i-й подвижный объект движется и наблюдается системой разведки. Согласно алгоритму i-й объект должен остановиться.
Если счетный триггер 11 переходит в нулевое состояние и i-й элемент блока счетных триггеров 8 находится в нулевом состояние, элементы НЕ 9 и 10 преобразуют эти нулевые сигналы в единичные. Соответственно блок И 6 выдает единичные сигнал, который инициализирует смену состояния и i-ro элемента блока счетных триггеров 8. Этому соответствует ситуация - когда разведывательная система прекращает проводить разведку по обнаружению ПО, то ПО начинает двигаться.
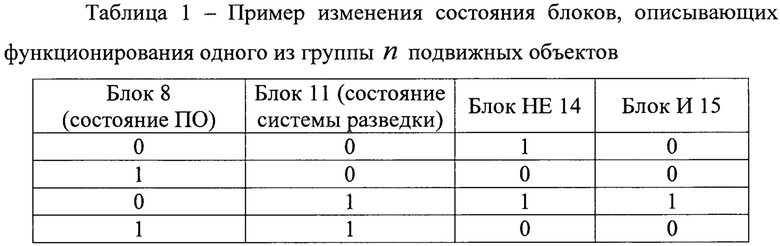
В блоке И 15 для каждого из т подвижных объектов формируется сигнал «1», если соответствующий объект не обнаружен системой разведки противника, то есть объект стоит, а система разведки ведет наблюдение (таблица 1).
В сумматоре 16 осуществляется расчет количества не обнаруженных подвижных объектов.
Далее в блоке сравнения 12 сравнивается количество не обнаруженных объектов с требуемым, если количество не обнаруженных объектов менее требуемого, в блок изменения интенсивности 7 формирует сигнал на увеличение параметра  на величину шага
на величину шага  .
.
Процесс повторяется до обеспечения требуемого количества не обнаруженных объектов.
Таким образом, в предложенном устройстве достигается требуемый технический результат, заключающийся в определении оптимальных значений параметров процесса передвижения группы подвижных объектов.
Использованные источники
1. Патент на изобретение RU №2246174, опубликован 10.02.2005.
2. Патент на изобретение RU №2385493, опубликован 27.03.2010.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ПРОЦЕССА ПЕРЕМЕЩЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2008 |
|
RU2385493C1 |
| Устройство для моделирования процесса перемещения подвижного объекта в условиях функционирования космической разведки с учетом возможных неисправностей | 2019 |
|
RU2726834C1 |
| Устройство для моделирования деятельности человека-оператора | 1990 |
|
SU1783541A1 |
| Генератор случайного потока импульсов | 1988 |
|
SU1587625A2 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ КАТАЛОГА РАЗВЕДКИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2007 |
|
RU2353970C1 |
| Устройство для контроля аналоговых объектов | 1988 |
|
SU1522239A1 |
| Генератор случайного процесса | 1984 |
|
SU1234833A1 |
| Устройство для моделирования распределения приоритетов | 1986 |
|
SU1352499A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ СИСТЕМЫ РАДИОСВЯЗИ | 1998 |
|
RU2156032C2 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ СУДОВ | 1991 |
|
RU2042212C1 |
Изобретение относится к автоматике и вычислительной технике и может быть использовано в робототехнических комплексах военного назначения, состоящих из группы подвижных объектов с централизованной системой управления в условиях функционирования космической разведки. Технический результат заключается в расширении арсенала средств того же назначения для определения групп подвижных объектов. Устройство содержит генератор тактовых импульсов, два генератора пуассоновских импульсов, три элемента НЕ, один элемент ИЛИ, три элемента И, один блок из n счетных триггеров, один счетный триггер, один сумматор, один блок сравнения, один блок изменения интенсивности и один блок ввода интенсивности. 1 ил., 1 табл.
Устройство оптимизации процесса передвижения группы подвижных объектов, содержащее первый генератор пуассоновских импульсов, первый элемент И, второй элемент И, элемент ИЛИ, генератор тактовых импульсов, элемент НЕ, второй генератор пуассоновских импульсов и счетный триггер, отличающееся тем, что введены блок из n счетных триггеров, второй элемент НЕ, третий элемент НЕ, третий элемент И, сумматор, блок сравнения, блок ввода значения интенсивности и блок изменения интенсивности, при этом выход блока ввода значения интенсивности соединен с входом первого генератора пуассоновских импульсов, n выходов которого соединены с первым входом элемента ИЛИ, n выходов которого соединены с входом блока из n счетных триггеров, n выходов которого соединены с входом третьего элемента НЕ, первым входом второго элемента И и входом первого элемента НЕ, выход которого соединен с первым входом первого элемента И, выход первого элемента И соединен со вторым входом элемента ИЛИ, выход второго элемента И соединен с входом генератора тактовых импульсов, выход которого соединен с третьим входом элемента ИЛИ, n выходов третьего элемента НЕ соединены с входом третьего элемента И, n выходов которого соединены со входом сумматора, выход сумматора соединен со входом блока сравнения, при этом выход блока сравнения соединен с блоком изменения интенсивности, выход которого соединен с блоком ввода интенсивности, выход второго генератора пуассоновских импульсов соединен с входом счетного триггера, первый выход которого соединен со вторым элементом НЕ, выход которого соединен со вторым входом первого элемента И, второй выход счетного триггера соединен со вторым входом второго элемента И, третий выход - со вторым входом третьего элемента И.
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ПРОЦЕССА ПЕРЕМЕЩЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2008 |
|
RU2385493C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ КАТАЛОГА РАЗВЕДКИ РАЗНОТИПНЫХ ПОДВИЖНЫХ ОБЪЕКТОВ | 2013 |
|
RU2544761C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ПРОЦЕССА ПРИНЯТИЯ РЕШЕНИЙ | 2004 |
|
RU2262131C1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |

