Изобретение относится к автоматике и вычислительной технике и может быть использовано в специализированных устройствах вычислительной техники для моделирования процесса перемещения подвижного объекта (ПО) с учетом возможных неисправностей, например, в условиях функционирования космической разведки.
Известно устройство генератор импульсов со случайной длительностью (SU №1234832 А1), содержащее элементы задержки, триггеры, генератор импульсов, генератор равномерно распределенных случайных чисел, регистры сдвига, элементы И, дешифратор.
Недостатком устройства (SU №1234832 А1) является относительно узкие функциональные возможности.
Наиболее близким по технической сущности к заявляемому устройству является устройство для моделирования процесса перемещения подвижного объекта (RU №2385493), содержащее: два генератора пуассоновских импульсов, генератор тактовых импульсов, элемент ИЛИ, два элемента И, два счетных триггера, элемент НЕ.
Недостатком устройства для моделирования процесса перемещения подвижного объекта (RU №2385493) являются относительно узкие функциональные возможности, не позволяющие моделировать процесс перемещения подвижного объекта в условиях функционирования космической разведки с учетом возможных неисправностей.
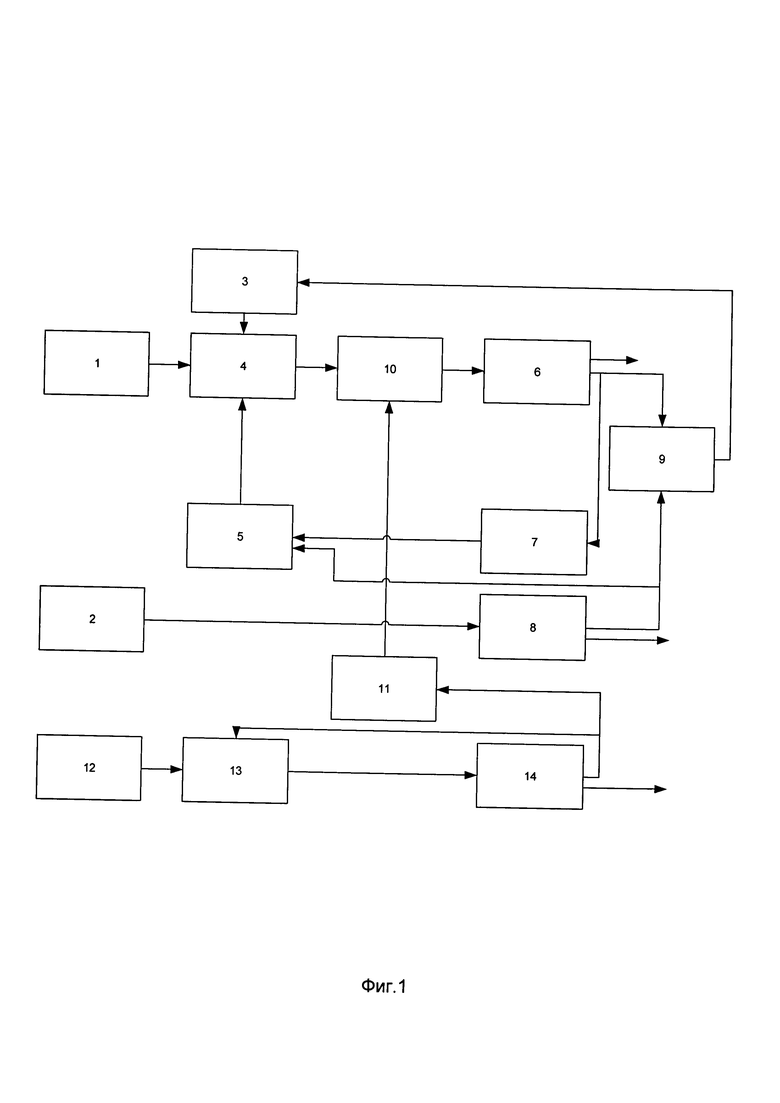
Требуемый технический результат достигается тем, что в устройство, содержащее первый генератор пуассоновских импульсов, второй генератор пуассоновских импульсов, генератор тактовых импульсов, элемент ИЛИ 4, первый элемент И, второй элемент И, первый счетный триггер, второй счетный триггер, элемент НЕ, введены генератор импульсов со случайной длительностью, второй элемент ИЛИ, третий счетный триггер, второй элемент НЕ, третий элемент И, при этом выход первого генератора пуассоновских импульсов соединен с первым входом элемент ИЛИ, выход которого соединен с входом первого счетного триггера, выход которого соединен с первым входом второго элемента И, и входом элемента НЕ, выход которого соединен с первым входом первого элемента И, выход которого соединен с вторым входом элемента ИЛИ, выход второго элемента И соединен с входом генератора тактовых импульсов, выход которого соединен с третьим входом элемента ИЛИ, выход второго генератора пуассоновских импульсов соединен с входом второго счетного триггера, выход которого соединен со вторыми входами первого элемента И и второго элемента И, выход генератора импульсов со случайной длительностью соединен со входом второго элемента ИЛИ, выход которого соединен со входом третьего счетного триггера, выход которого соединен со входом второго элемента ИЛИ и со входом второго элемента НЕ, выход второго элемента НЕ соединен со входом третьего элемента И, вход которого соединен с первым элементом ИЛИ, а выход с первым счетным триггером.
Сущность изобретения поясняется чертежом, где на фиг. 1 представлен возможный вариант построения устройства для моделирования процесса перемещения подвижного объекта с учетом возможных неисправностей, который содержит:
1 - первый генератор пуассоновских импульсов;
2 - второй генератор пуассоновских импульсов;
3 - генератор тактовых импульсов;
4 - элемент ИЛИ;
5 - первый элемент И;
6 - первый счетный триггер;
7 - элемент НЕ;
8 - второй счетный триггер;
9 - второй элемент И;
10 - третий элемент И;
11 - второй элемент НЕ;
12 - генератор импульсов со случайной длительностью;
13 - второй элемент ИЛИ;
14 - третий счетный триггер.
Работает устройство для моделирования процесса перемещения подвижного объекта с учетом возможных неисправностей следующим образом: при моделировании функционирования подвижного объекта с учетом возможных неисправностей предполагается, что для повышения скрытности за счет создания неопределенности своего местоположения, подвижный объект периодически перемещается в области функционирования. То есть, в процессе функционирования подвижный объект может находиться в одном из состояний: {0 - стоит, 1 - двигается}.
Для затруднения прогнозирования состояния подвижного объекта во времени, необходимо организовать процесс смены позиций таким образом, чтобы переход из одного состояния в другое осуществлялся в случайные моменты времени.
При этом время пребывания подвижного объекта на стоянке в некоторой точке района его дислокации целесообразно распределять по показательному закону. Параметры распределения определяются обстановкой, например, от времени суток.
Предположим что, существует разведывательная система, например, система космической разведки, предназначенная для обнаружения местонахождения ПО, которая может находиться в одном из двух состояний {0 - не проводит разведку по обнаружению подвижного объекта, 1 - проводить разведку по обнаружению подвижного объекта}, а так же допустим, что во время функционирования ПО может возникнуть неисправность, приводящая к его вынужденной остановке {0 - ПО в исправном состоянии, движение возможно, 1 - ПО в неисправном состоянии, движение невозможно}. Возникновение неисправностей целесообразно распределять по экспоненциальному закону. Параметры распределения определяются временем наработки на отказ.
При моделировании процесса разведки по обнаружению местоположения ПО введено допущение, что моменты обнаружения ПО во времени распределены по показательному закону. Параметры распределения определяются составом группировки разведывательных средств, например, их количеством.
Изменение состояний ПО происходит в случайные моменты времени, а в зависимости от того в каком состоянии находится система разведки, дополнительно принимается решение об изменении текущего состояния ПО.
Алгоритм смены состояний ПО в районе дислокации при функционировании разведывательной системы разведки можно представить следующим образом:
1. Если ПО исправно (0) и КА совершает пролет вне ПР (0) и ПО стоит (0), то ПО стоит (0).
2. Если ПО неисправно (1) и КА совершает пролет вне ПР (0), то ПО стоит (0).
3. Если ПО исправно (0) и КА ведет разведку в ПР (1) и ПО стоит (0), то ПО стоит (0).
4. Если ПО неисправно (1) и КА ведет разведку в ПР (1), то ПО стоит (0).
5. Если ПО исправно (0) и ПО едет (1) и КА совершает пролет вне ПР (0), то ПО едет (1).
6. Если ПО исправно (0) и ПО едет (1) и КА ведет разведку в ПР (1), то ПО стоит (0).
7. Как только КА прекращает разведку (1->0) в ПР, если ПО исправно (0), то ПУ начинает ехать (0->1).
8. Как только КА прекращает разведку (1->0) в ПР, если ПО неисправно (1), то ПО стоит (0).
Указанный алгоритм моделирования процесса перемещения подвижного объекта с учетом возможных неисправностей реализуется следующим образом: в начальном состоянии первый счетный триггер 6, второй счетный триггер 8, третий счетный триггер 14 находятся в состоянии логического нуля.
При запуске устройства от внешнего источника, не показанного на чертеже, в первом генераторе 1 пуассоновских импульсов и втором генераторе 2 пуассоновских импульсов возникают импульсы, в случайные моменты соответствующие пуассоновскому распределению, которые соответствуют экспоненциальному распределению интервалов времени между сменой состояний. В генераторе 12 импульсов со случайной длительностью возникают импульсы, в случайные моменты времени, которые соответствуют экспоненциальному распределению времени наработки на отказ. Импульс из первого генератора 1 пуассоновских импульсов проходит через элемент ИЛИ 4 и переводит первый счетный триггер 6 из нулевого состояния в единичное состояние и наоборот. Импульс из второго генератора 2 пуассоновских импульсов переводит второй счетный триггер 8 из нулевого состояния в единичное состояние и наоборот. А импульс из генератор импульсов со случайной длительностью 12 проходит через элемент ИЛИ 13 и переводит третий счетный триггер 14 из нулевого состояния в единичное. Состояние первого счетного триггера 6 и третьего счетного триггера 14 описывают состояние ПО, а состояние второго счетного триггера 8 описывает состояние системы разведки.
Таким образом, благодаря введению новых элементов и связей достигается требуемый технический результат - расширение функциональных возможностей за счет моделирования процесса перемещения подвижного объекта с учетом возникновения неисправностей.
Источники информации принятые во внимание
1. SU №1234832 А1 1986 г.
2. RU №2385493 2007 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ПРОЦЕССА ПЕРЕМЕЩЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2008 |
|
RU2385493C1 |
| Устройство оптимизации процесса передвижения группы подвижных объектов | 2018 |
|
RU2707140C1 |
| Устройство для моделирования систем массового обслуживания | 1989 |
|
SU1691850A2 |
| Устройство для моделирования процесса поддержания сложного технического объекта в готовности к применению по назначению | 2019 |
|
RU2718967C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ СИСТЕМЫ РАДИОСВЯЗИ | 1998 |
|
RU2156032C2 |
| Устройство для моделирования деятельности человека-оператора | 1990 |
|
SU1783541A1 |
| Устройство для моделирования робота-манипулятора | 1987 |
|
SU1441414A1 |
| Генератор равномерно распределенныхСлучАйНыХ иНТЕРВАлОВ ВРЕМЕНи | 1979 |
|
SU845154A1 |
| Генератор случайного процесса | 1983 |
|
SU1138802A1 |
| Устройство для поиска неисправностей в логических узлах | 1981 |
|
SU970283A1 |
Изобретение относится к автоматике и вычислительной технике. Технический результат заключается в расширении арсенала средств. Устройство для моделирования процесса перемещения подвижного объекта в условиях функционирования космической разведки с учетом возможных неисправностей содержит первый генератор пуассоновских импульсов, второй генератор пуассоновских импульсов, генератор тактовых импульсов, элемент ИЛИ, первый элемент И, первый счетный триггер, элемент НЕ, второй счетный триггер, второй элемент И, третий элемент И, второй элемент НЕ, генератор импульсов со случайной длительностью, второй элемент ИЛИ, третий счетный триггер. 1 ил.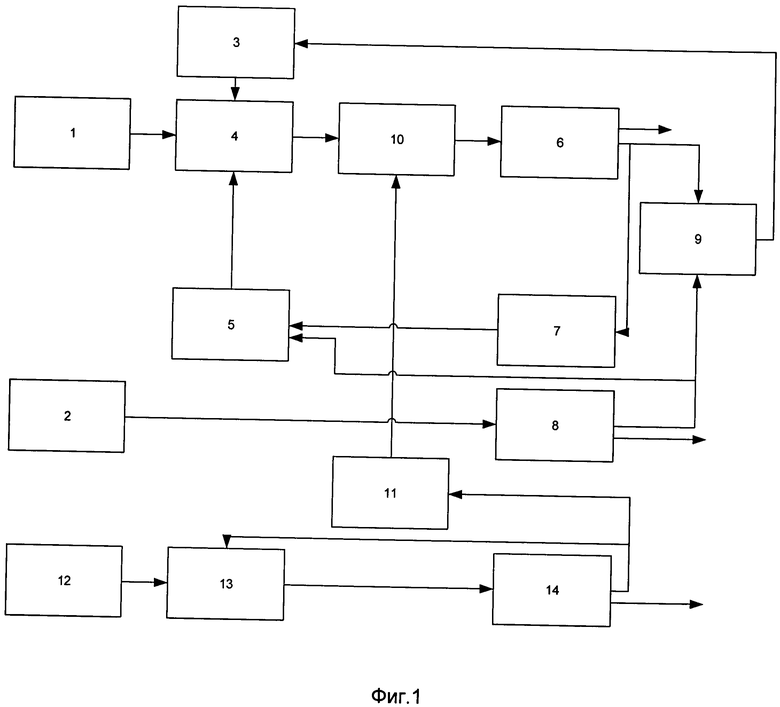
Устройство для моделирования процесса перемещения подвижного объекта, содержащее: два генератора пуассоновских импульсов, генератор тактовых импульсов, элемент ИЛИ, два элемента И, два счетных триггера, элемент НЕ, отличающееся тем, что в него дополнительно введены генератор импульсов со случайной длительностью, второй элемент ИЛИ, третий счетный триггер, второй элемент НЕ, третий элемент И, при этом выход первого генератора пуассоновских импульсов соединен с первым входом элемента ИЛИ, выход которого соединен с входом первого счетного триггера, выход которого соединен с первым входом второго элемента И и входом элемента НЕ, выход которого соединен с первым входом первого элемента И, выход которого соединен с вторым входом элемента ИЛИ, выход второго элемента И соединен с входом генератора тактовых импульсов, выход которого соединен с третьим входом элемента ИЛИ, выход второго генератора пуассоновских импульсов соединен с входом второго счетного триггера, выход которого соединен со вторыми входами первого элемента И и второго элемента И, выход генератора импульсов со случайной длительностью соединен со входом второго элемента ИЛИ, выход которого соединен со входом третьего счетного триггера, выход которого соединен со входом второго элемента ИЛИ и со входом второго элемента НЕ, выход второго элемента НЕ соединен со входом третьего элемента И, вход которого соединен с первым элементом ИЛИ, а выход - с первым счетным триггером.
| Устройство оптимизации процесса передвижения группы подвижных объектов | 2018 |
|
RU2707140C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ПРОЦЕССА ПЕРЕМЕЩЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2008 |
|
RU2385493C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ПРОЦЕССА ПЕРЕМЕЩЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2005 |
|
RU2298825C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ПРОЦЕССА ОБНАРУЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2006 |
|
RU2320013C1 |
| JP 2006146807 A, 08.06.2006. | |||

