Изобретение относится к автоматике и вычислительной технике и может быть использовано в специализированных устройствах вычислительной техники для моделирования процесса перемещения подвижного объекта (ПО), например, в условиях функционирования космической разведки.
Известно устройство, содержащее k+1 запоминающих устройств, блок сравнения, k цифроаналоговых преобразователей, схему управления, регистр, счетчик, селектор, k формирователей колокообразных импульсов, сумматор, преобразователь напряжения - ток и генератор тактовых импульсов [1].
Недостатком устройства являются относительно узкие функциональные возможности.
Наиболее близким к заявляемому устройству является устройство, содержащее: генератор пуассоновского потока импульсов, управляемый делитель, семь элементов И, три элемента НЕ, три элемента ИЛИ, два реверсивных счетчика, датчик случайного потока импульсов, генератор тактовых импульсов [2].
Недостатком наиболее близкого технического решения являются относительно узкие функциональные возможности, не позволяющие моделировать процесс перемещения подвижного объекта.
Требуемый технический результат - расширение функциональных возможностей путем обеспечения моделирования процесса перемещения подвижного объекта.
Требуемый технический результат достигается тем, что в устройство, содержащее первый генератор пуассоновских импульсов, первый элемент И, второй элемент И, элемент ИЛИ, генератор тактовых импульсов, элемент НЕ, выход которого соединен с первым входом первого элемента И, введены второй генератор пуассоновских импульсов, первый счетный триггер, второй счетный триггер, при этом выход первого генератора пуассоновских импульсов соединен с первым входом элемента ИЛИ, выход которого соединен с входом первого счетного триггера, выход которого соединен с первым входом второго элемента И и входом элемента НЕ, выход первого элемента И соединен с вторым входом элемента ИЛИ, выход второго элемента И соединен с входом генератора тактовых импульсов, выход которого соединен с третьим входом элемента ИЛИ, выход второго генератора пуассоновских импульсов соединен с входом второго счетного триггера, выход которого соединен со вторыми входами первого и второго элемента И.
Анализ научно-технической литературы показал, что до даты подачи заявки отсутствовали устройства с указанной совокупностью признаков.
Следовательно, предложение отвечает требованию новизны.
Кроме того, требуемый технический результат достигается всей вновь введенной совокупностью существенных признаков, которая в известной научно-технической литературе не обнаружена.
Следовательно, предложение отвечает требованию изобретательского уровня.
На чертеже представлена структурная схема устройства для моделирования процесса перемещения подвижного объекта.
Устройство для моделирования процесса перемещения подвижного объекта содержит первый генератор 1 пуассоновских импульсов, второй генератор 2 пуассоновских импульсов, генератор 3 тактовых импульсов, элемент ИЛИ 4, первый элемент И 5, второй элемент И 9, первый счетный триггер 6, второй счетный триггер 8, элемент НЕ 7, при этом выход первого генератора 1 пуассоновских импульсов соединен с первым входом элемента ИЛИ 4, выход которого соединен с входом первого счетного триггера 6, выход которого соединен с первым входом второго элемента И 9 и входом элемента НЕ 7, выход которого соединен с первым входом первого элемента И 5, выход которого соединен с вторым входом элемента ИЛИ 4, выход второго элемента И 9 соединен с входом генератора 3 тактовых импульсов, выход которого соединен с третьим входом элемента ИЛИ 4, выход второго генератора 2 пуассоновских импульсов соединен с входом второго счетного триггера 8, выход которого соединен со вторыми входами первого элемента И 5 и второго элемента И 9.
Работает устройство для моделирования процесса перемещения подвижного объекта следующим образом.
При моделировании функционирования подвижного объекта предполагается, что для повышения скрытности за счет создания неопределенности своего местоположения, подвижный объект периодически перемещается в области функционирования. То есть в процессе функционирования подвижный объект может находиться в одном из состояний: {0 - стоит, 1 - двигается}.
Для затруднения прогнозирования состояния подвижного объекта во времени, необходимо организовать процесс смены позиций таким образом, чтобы переход из одного состояния в другое осуществлялся в случайные моменты времени.
При этом время пребывания подвижного объекта на стоянке в некоторой точке района его дислокации целесообразно распределять по показательному закону. Параметры распределения определяются обстановкой, например, от времени суток.
Предположим, что существует разведывательная система, например, система космической разведки, предназначенная для обнаружения местонахождения ПО, которая может находиться в одном из двух состояний {0 - не проводит разведку по обнаружению подвижного объекта, 1 - проводит разведку по обнаружению подвижного объекта}.
При моделировании процесса разведки по обнаружению местоположения ПО введено допущение, что моменты обнаружения ПО во времени распределены по показательному закону. Параметры распределения определяются составом группировки разведывательных средств, например их количеством.
Изменение состояний ПО происходит в случайные моменты времени, а в зависимости от того, в каком состоянии находится система разведки, дополнительно принимается решение об изменении текущего состояния ПО.
Алгоритм смены состояний ПО в районе дислокации при функционировании разведывательной системы разведки можно представить следующим образом:
- если ПО стоит и разведывательная система не проводит разведку по обнаружению ПО, то ПО стоит;
- если ПО стоит и разведывательная система проводит разведку по обнаружению ПО, то ПО стоит;
- если ПО движется и разведывательная система не проводит разведку по обнаружению ПО, то ПО движется;
- если ПО движется и разведывательная система проводит разведку по обнаружению ПО, то ПО стоит;
- если разведывательная система прекращает проводить разведку по обнаружению ПО, то ПО начинает двигаться.
Указанный алгоритм моделирования процесса перемещения подвижного объекта реализуется следующим образом.
В начальном состоянии первый счетный триггер 6, второй счетный триггер 8 находятся в состоянии логического нуля.
При запуске устройства от внешнего источника, не показанного на чертеже, в первом генераторе 1 пуассоновских импульсов и втором генераторе 2 пуассоновских импульсов возникают импульсы, в случайные моменты соответствующие пуассоновскому распределению, которые соответствуют экспоненциальному распределению интервалов времени между сменой состояний. Импульс из первого генератора 1 пуассоновских импульсов проходит через элемент ИЛИ 4 и переводит первый счетный триггер 6 из нулевого состояния в единичное состояние и наоборот. А импульс из второго генератора 2 пуассоновских импульсов переводит второй счетный триггер 8 из нулевого состояния в единичное состояние и наоборот. Состояние первого счетного триггера 6 описывает состояние ПО, а состояние второго счетного триггера 8 описывает состояние системы разведки.
Таким образом, благодаря введению новых элементов и связей достигается требуемый технический результат - расширение функциональных возможностей за счет моделирования процесса перемещения подвижного объекта.
Источники информации
1. Патент на изобретение RU №2246174.
2. Патент на изобретение RU №98113690.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования процесса перемещения подвижного объекта в условиях функционирования космической разведки с учетом возможных неисправностей | 2019 |
|
RU2726834C1 |
| Устройство оптимизации процесса передвижения группы подвижных объектов | 2018 |
|
RU2707140C1 |
| Устройство для моделирования процесса поддержания сложного технического объекта в готовности к применению по назначению | 2019 |
|
RU2718967C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ СИСТЕМЫ РАДИОСВЯЗИ | 1998 |
|
RU2156032C2 |
| Устройство для моделирования деятельности человека-оператора | 1990 |
|
SU1783541A1 |
| СПОСОБ И УСТРОЙСТВО ОЦЕНКИ РАЗВЕДЫВАТЕЛЬНОЙ ДОСТУПНОСТИ УЗЛОВ КОММУТАЦИИ СЕТИ РАДИОСВЯЗИ | 2020 |
|
RU2751583C1 |
| Генератор случайного процесса | 1984 |
|
SU1234833A1 |
| Генератор случайного процесса | 1983 |
|
SU1087992A1 |
| Генератор случайных импульсов | 1979 |
|
SU875381A1 |
| Генератор равномерно распределенныхСлучАйНыХ иНТЕРВАлОВ ВРЕМЕНи | 1979 |
|
SU845154A1 |
Устройство для моделирования процесса перемещения подвижного объекта относится к автоматике и вычислительной технике и может быть использовано в специализированных устройствах вычислительной техники для моделирования процесса перемещения подвижного объекта, например, в условиях функционирования космической разведки. Требуемый технический результат заключается в расширении функциональных возможностей в устройстве, содержащем два генератора пуассоновских импульсов, генератор тактовых импульсов, элемент ИЛИ, два элемента И, два счетных триггера, элемент НЕ. 1 ил.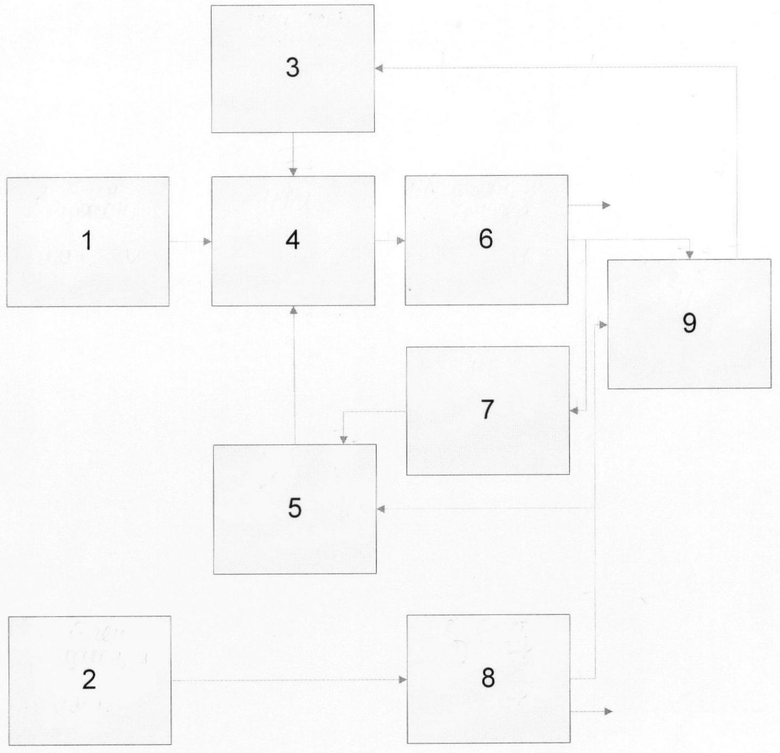
Устройство для моделирования процесса перемещения подвижного объекта, содержащее первый генератор пуассоновских импульсов, первый элемент И, второй элемент И, элемент ИЛИ, генератор тактовых импульсов, элемент НЕ, выход которого соединен с первым входом первого элемента И, отличающееся тем, что введены второй генератор пуассоновских импульсов, первый счетный триггер, второй счетный триггер, при этом выход первого генератора пуассоновских импульсов соединен с первым входом элемента ИЛИ, выход которого соединен с входом первого счетного триггера, выход которого соединен с первым входом второго элемента И и входом элемента НЕ, выход первого элемента И соединен с вторым входом элемента ИЛИ, выход второго элемента И соединен с входом генератора тактовых импульсов, выход которого соединен с третьим входом элемента ИЛИ, выход второго генератора пуассоновских импульсов соединен с входом второго счетного триггера, выход которого соединен со вторыми входами первого и второго элемента И.
| RU 98113690 А, 10.05.2000 | |||
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ПРОЦЕССА ПЕРЕМЕЩЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2005 |
|
RU2298825C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ПРОЦЕССА ОБНАРУЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2006 |
|
RU2320013C1 |
| JP 2006146807 A, 08.06.2006 | |||
| ГЕНЕРАТОР ПУАССОНОВСКОГО ИМПУЛЬСНОГО ПОТОКА | 2003 |
|
RU2246174C1 |
| JP 2005301651 A, 27.10.2005. | |||

