Область техники
Настоящее изобретение относится к контроллеру запуска и способу управления запуском, которые применяются в гибридной системе транспортного средства.
Уровень техники
Контроллер запуска гибридной системы, описанный в японской выложенной патентной публикации № 2013-252725, обнаруживает угол поворота коленчатого вала, когда двигатель останавливается. Дополнительно, в контроллере запуска, заданный угловой диапазон задается в диапазон угла поворота коленчатого вала, в котором пусковой крутящий момент, требуемый для перезапуска двигателя, становится заданным значением или ниже. Если угол поворота коленчатого вала в состоянии, в котором двигатель находится в остановленном состоянии, находится за пределами заданного углового диапазона, когда двигатель перезапускается, контроллер запуска, прежде всего, реверсивно поворачивает коленчатый вал посредством мотора-генератора, и задает угол поворота коленчатого вала так, чтобы попадать в заданный угловой диапазон. После чего, контроллер запуска нормально вращает коленчатый вал посредством мотора-генератора и затем начинает впрыск топлива для перезапуска двигателя.
В контроллере запуска этого документа, если угол поворота коленчатого вала в состоянии, в котором двигатель находится в остановленном состоянии, находится за пределами заданного углового диапазона, период времени, требуемый для перезапуска двигателя, становится продолжительней пропорционально времени операции реверсивного вращения коленчатого вала. Следовательно, существует опасение, что отклик при перезапуске двигателя будет ухудшаться, и некомфортное ощущение будет возникать у водителя транспортного средства.
Сущность изобретения
Данная сущность предусмотрена для того, чтобы в упрощенной форме представить набор идей, которые дополнительно описываются ниже в подробном описании. Эта сущность не имеет намерения идентифицировать ключевые или важнейшие признаки заявленного предмета изобретения, а также не имеет намерения использоваться в качестве помощи при определении объема заявленного предмета изобретения.
В первом общем аспекте предоставляется контроллер запуска, который применяется в гибридной системе, включающей в себя двигатель, служащий в качестве источника привода транспортного средства, и мотор-генератор, соединенный с возможностью привода с двигателем. Контроллер запуска включает в себя секцию управления приводом и секцию обнаружения угла остановки. Секция управления приводом автоматически останавливает двигатель и ограничивает объем всасываемого воздуха в двигатель, останавливая впрыск топлива в двигатель, когда заданное конкретное условие удовлетворяется. Секция обнаружения угла остановки обнаруживает угол поворота коленчатого вала, когда двигатель автоматически останавливается, в качестве угла остановки. Секция управления приводом конфигурируется так, что, если угол остановки находится за пределами диапазона угла остановки для угла поворота коленчатого вала, в котором возможно перезапускать двигатель, проворачивая коленчатый вал двигателя посредством мотора-генератора, секция управления приводом проворачивает коленчатый вал двигателя посредством мотора-генератора, или перезапускает двигатель, возобновляя впрыск топлива в двигатель, прежде чем период отрицательного давления в цилиндре, который определяется как период времени, в котором давление в цилиндре двигателя является отрицательным давлением относительно атмосферного давления, проходит после начала автоматической остановки двигателя.
Во втором общем аспекте предоставляется контроллер запуска, который применяется в гибридной системе, включающей в себя двигатель, служащий в качестве источника привода транспортного средства, и мотор-генератор, соединенный с возможностью привода с двигателем. Контроллер запуска включает в себя секцию управления приводом и секцию вычисления допустимого угла. Секция управления приводом автоматически останавливает двигатель и ограничивает объем всасываемого воздуха в двигатель, останавливая впрыск топлива в двигатель, когда заданное конкретное условие удовлетворяется. Секция вычисления допустимого угла вычисляет, в качестве допустимого диапазона угла поворота коленчатого вала, диапазон угла остановки для угла поворота коленчатого вала в коленчатом вале, в котором возможно перезапускать двигатель, проворачивая коленчатый вал двигателя посредством мотора-генератора. Секция управления приводом конфигурируется так, что, если допустимый диапазон угла поворота коленчатого вала меньше или равен заданному конкретному диапазону, секция управления приводом проворачивает коленчатый вал двигателя посредством мотора-генератора, или перезапускает двигатель, возобновляя впрыск топлива в двигатель, прежде чем период отрицательного давления в цилиндре, который определяется как период времени, в котором давление в цилиндре двигателя является отрицательным давлением относительно атмосферного давления, проходит после начала автоматической остановки двигателя.
В третьем общем аспекте предоставляется способ управления запуском, который применяется в гибридной системе, включающей в себя двигатель, служащий в качестве источника привода транспортного средства, и мотор-генератор, соединенный с возможностью привода с двигателем. Способ управления запуском включает в себя: автоматическую остановку двигателя и ограничение объема всасываемого воздуха в двигатель посредством прекращения подачи топлива в двигателе, когда заданное конкретное условие удовлетворяется; обнаружение угла поворота коленчатого вала, когда двигатель автоматически останавливается, в качестве угла остановки; и если угол остановки находится за пределами диапазона угла остановки для угла поворота коленчатого вала, в котором возможно перезапускать двигатель путем проворачивания коленчатого вала двигателя посредством мотора-генератора, проворачивание коленчатого вала двигателя посредством мотора-генератора или перезапуск двигателя путем возобновления впрыска топлива в двигатель, прежде чем период отрицательного давления в цилиндре, который определяется как период времени, в котором давление в цилиндре двигателя является отрицательным давлением относительно атмосферного давления, проходит после начала автоматической остановки двигателя.
В четвертом общем аспекте предоставляется способ управления запуском, который применяется в гибридной системе, включающей в себя двигатель, служащий в качестве источника привода транспортного средства, и мотор-генератор, соединенный с возможностью привода с двигателем. Способ управления запуском включает в себя: автоматическую остановку двигателя и ограничение объема всасываемого воздуха в двигатель посредством прекращения впрыска топлива в двигателе, когда заданное конкретное условие удовлетворяется; вычисление, в качестве допустимого диапазона угла поворота коленчатого вала, диапазона угла остановки для угла поворота коленчатого вала в коленчатом вале, в котором возможно перезапускать двигатель, проворачивая коленчатый вал двигателя посредством мотора-генератора; и если допустимый диапазон угла поворота коленчатого вала меньше или равен заданному конкретному диапазону, проворачивание коленчатого вала двигателя посредством мотора-генератора или перезапуск двигателя посредством возобновления впрыска топлива в двигателе, прежде чем период отрицательного давления в цилиндре, который определяется как период времени, в котором давление в цилиндре двигателя является отрицательным давлением относительно атмосферного давления, проходит после начала автоматической остановки двигателя.
Другие признаки и аспекты будут очевидны из последующего подробного описания, чертежей и формулы изобретения.
Краткое описание чертежей
Фиг. 1 - схематичный чертеж, показывающий конфигурацию гибридной системы;
Фиг. 2 - график, показывающий соотношение между углом остановки коленчатого вала и пусковым крутящим моментом, требуемым для перезапуска двигателя, который был остановлен;
Фиг. 3 - график, показывающий соотношение между углом остановки коленчатого вала и пусковым крутящим моментом, требуемым для перезапуска двигателя, который был остановлен;
Фиг. 4 - график, показывающий соотношение между скоростью вращения двигателя и периодом отрицательного давления в цилиндре;
Фиг. 5 - блок-схема последовательности операций, показывающая процесс автоматической остановки-перезапуска посредством электронного блока управления; и
Фиг. 6 - блок-схема последовательности операций, показывающая процесс автоматической остановки-перезапуска посредством электронного блока управления.
Повсюду на чертежах и в подробном описании одинаковые ссылочные номера ссылаются на одинаковые элементы. Чертежи могут быть начерчены не в масштабе, и относительный размер, пропорции и изображение элементов на чертежах могут быть преувеличены для ясности, иллюстрации и удобства.
Подробное описание изобретения
Это описание обеспечивает исчерпывающее понимание описываемых способов, устройств и/или систем. Модификации и эквиваленты описанных способов, устройств и/или систем являются очевидными обычному специалисту в области техники. Последовательности операций являются примерными и могут быть изменены, как очевидно обычному специалисту в области техники, за исключением операций, обязательно происходящих в определенном порядке. Описания функций и конструкций, которые являются хорошо известными обычному специалисту в области техники, могут быть пропущены.
Примерные варианты осуществления могут иметь различные формы и не ограничиваются описанными примерами. Однако, описанные примеры являются полными и законченными и передают полную область охвата изобретения обычному специалисту в области техники.
Варианты осуществления настоящего изобретения будут описаны далее в данном документе. Сначала, схематичная конфигурация гибридной системы транспортного средства будет описана со ссылкой на фиг. 1.
Как показано на фиг. 1, гибридная система включает в себя четырехцилиндровый двигатель 10, который служит в качестве источника привода. В двигателе 10 впрыск топлива и сгорание топлива выполняются по очереди в каждом цилиндре. Дополнительно, цикл от начала такта впуска в цилиндрах двигателя 10 до окончания такта выпуска через такт сжатия и такт расширения (такт сгорания) определяется в качестве одного цикла сгорания (720 CA). В то же время, циклы сгорания для четырех цилиндров являются сдвинутыми друг от друга на четверть цикла (180 CA).
Двигатель 10 имеет коленчатый вал 10a, соединенный с возможностью привода с приводимыми в движение колесами через трансмиссию 11 и т.п. Коленчатый вал 10a соединяется с возможностью привода с первым шкивом 12. Приводной ремень 13 охватывает петлей первый шкив 12. Коленчатый вал 10a также соединяется с возможностью привода с гидравлическим насосом, который создает давление масла, компрессором для кондиционирования воздуха и т.п., посредством ремня, шкива, зубчатой передачи (зубчатого колеса), цепи и т.п. (не показано).
Гибридная система включает в себя мотор-генератор 20, служащий в качестве источника привода, который отличается от двигателя 10. Мотор-генератор 20 является так называемым электромотором трехфазного переменного тока. Мотор-генератор 20 имеет выходной вал 20a, соединенный с возможностью привода со вторым шкивом 14. Приводной ремень 13 охватывает петлей второй шкив 14. Следовательно, мотор-генератор 20 соединяется с возможностью привода с коленчатым валом 10a через второй шкив 14, приводной ремень 13 и первый шкив 12.
Когда мотор-генератор 20 функционирует в качестве электромотора, мотор-генератор 20 прикладывает вращающий момент ко второму шкиву 14, и его вращающий момент привносится на коленчатый вал 10a через приводной ремень 13 и первый шкив 12. В этом случае, мотор-генератор 20 помогает приводу двигателя 10. С другой стороны, когда мотор-генератор 20 функционирует как генератор мощности, крутящий момент коленчатого вала 10a привносится на выходной вал 20a мотора-генератора 20 через первый шкив 12, приводной ремень 13 и второй шкив 14. После этого, мотор-генератор 20 генерирует электричество в соответствии с вращением выходного вала 20a.
Секция 20b датчика, которая обнаруживает состояние мотора-генератора 20, включена в мотор-генератор 20. Секция 20b датчика обнаруживает входное напряжение, которое вводится в мотор-генератор 20, входной ток, температуру, скорость вращения выходного вала 20a и т.п. и затем выводит эти результаты обнаружения в качестве сигнала, указывающего информацию IM о состоянии мотора-генератора 20.
Мотор-генератор 20 соединяется с высоковольтным аккумулятором 22 через инвертор 21. Инвертор 21 является двухсторонним инвертором и преобразует AC-напряжение, сформированное мотором-генератором 20, в DC-напряжение, и затем выводит его к высоковольтному аккумулятору 22 и преобразует DC-напряжение, выведенное высоковольтным аккумулятором 22, в AC-напряжение и затем выводит его мотору-генератору 20. Хотя фиг. 1 изображает инвертор 21 в качестве компонента, отличающегося от мотора-генератора 20, инвертор 21 является встроенным внутрь корпуса мотора-генератора 20 в некоторых случаях.
Высоковольтный аккумулятор 22 является литий-ионным аккумулятором. Когда мотор-генератор 20 функционирует как электромотор, высоковольтный аккумулятор 22 подает электрическую мощность мотору-генератору 20. Дополнительно, когда мотор-генератор 20 функционирует как генератор мощности, высоковольтный аккумулятор 22 снабжается и заряжается электрической мощностью от мотора-генератора 20.
Секция 22a датчика, которая обнаруживает состояние высоковольтного аккумулятора 22, является встроенной в высоковольтный аккумулятор 22. Секция 22a датчика обнаруживает напряжение между клеммами, выходной ток, температуру и т.п. высоковольтного аккумулятора 22 и выводит эти результаты обнаружения в качестве сигнала, указывающего информацию IHb о состоянии высоковольтного аккумулятора 22.
Мотор-генератор 20 соединяется с DC/DC-преобразователем 23 через инвертор 21. DC/DC-преобразователь 23 соединяется также с высоковольтным аккумулятором 22. DC/DC-преобразователь 23 понижает DC-напряжение, выводимое от инвертора 21 или от высоковольтного аккумулятора 22, до 12-15 В и выводит его. DC/DC-преобразователь 23 соединяется с низковольтным аккумулятором 24.
Низковольтный аккумулятор 24 является 12-вольтным свинцово-кислотным аккумулятором, который имеет более низкое напряжение по сравнению с высоковольтным аккумулятором 22. Низковольтный аккумулятор 24 выводит DC-напряжение 12 В, когда DC/DC-преобразователь 23 не работает, или когда выходное напряжение DC/DC-преобразователя 23 равно 12 В. Когда выходное напряжение DC/DC-преобразователя 23 выше напряжения разомкнутой цепи (OCV) низковольтного аккумулятора 24, низковольтный аккумулятор 24 снабжается и заряжается электрической мощностью от DC/DC-преобразователя 23.
Секция 24a датчика, которая обнаруживает состояние низковольтного аккумулятора 24, является встроенной в низковольтный аккумулятор 24. Секция 24a датчика обнаруживает напряжение между клеммами, выходной ток, температуру и т.п. низковольтного аккумулятора 24 и выводит эти результаты обнаружения в качестве сигнала, указывающего информацию ILb о состоянии низковольтного аккумулятора 24.
DC/DC-преобразователь 23 и низковольтный аккумулятор 24 соединяются с различными вспомогательными устройствами 25. Вспомогательные устройства 25 включают в себя лампы транспортного средства, такие как фары, сигналы поворота и подсветка салона, и устройства салона, такие как автомобильная навигационная система и динамики. Когда DC/DC-преобразователь 23 не работает, вспомогательные устройства 25 снабжаются электрической мощностью от низковольтного аккумулятора 24. Когда выходное напряжение DC/DC-преобразователя 23 выше напряжения разомкнутой цепи (OCV) низковольтного аккумулятора 24, вспомогательные устройства 25 снабжаются электрической мощностью от DC/DC-преобразователя 23.
Как показано на фиг. 1, гибридная система включает в себя электронный блок 30 управления, служащий в качестве контроллера запуска, который управляет двигателем 10, мотором-генератором 20 и т.п. Электронный блок 30 управления является схемой обработки (компьютером), который включает в себя арифметическую секцию, которая выполняет различные программы (приложения), секцию энергонезависимой памяти, в которой программы и т.п. хранятся, энергозависимую память, в которой части данных временно хранятся, когда программа выполняется, и т.п.
Электронный блок 30 управления принимает сигналы, которые указывают состояния соответствующих частей транспортного средства от различных датчиков или т.п., которые установлены в транспортном средстве. Подробно, электронный блок 30 управления принимает сигнал, указывающий угол CA поворота коленчатого вала 10a от датчика 31 угла поворота коленчатого вала. Датчик 31 угла поворота коленчатого вала обнаруживает угол CA поворота коленчатого вала 10a в единицу времени. Электронный блок 30 управления вычисляет скорость Ne вращения двигателя для двигателя 10 на основе угла CA поворота коленчатого вала, обнаруженного посредством датчика 31 угла поворота коленчатого вала. Кроме того, когда двигатель 10 автоматически останавливается, электронный блок 30 управления обнаруживает угол CA поворота коленчатого вала, обнаруженный посредством датчика 31 угла поворота коленчатого вала, когда коленчатый вал 10a останавливается, и обнаруживает этот угол CA поворота коленчатого вала в качестве угла CAs остановки. Другими словами, электронный блок 30 управления функционирует в качестве секции 30a обнаружения угла остановки.
Электронный блок 30 управления принимает сигнал, указывающий скорость SP транспортного средства, от датчика 32 скорости транспортного средства. Дополнительно, электронный блок 30 управления принимает сигнал, указывающий температуру THW хладагента двигателя 10, от датчика 33 температуры хладагента. Датчик 33 температуры хладагента присоединяется к выпускному отверстию водяной рубашки в блоке цилиндров или головке цилиндров двигателя 10. Датчик 33 температуры хладагента обнаруживает температуру хладагента в выпускном отверстии водяной рубашки в качестве температуры THW хладагента.
Электронный блок 30 управления принимает информацию IHb о состоянии от секции 22a датчика высоковольтного аккумулятора 22. Электронный блок 30 управления вычисляет состояние заряда (SOC) высоковольтного аккумулятора 22 на основе частей информации о напряжении между клеммами, выходном токе, температуре и т.п., высоковольтного аккумулятора 22, которые включены в информацию IHb о состоянии. В настоящем варианте осуществления состояние заряда высоковольтного аккумулятора 22 ссылается на отношение электрической энергии, которой высоковольтный аккумулятор 22 заряжается, когда информация IHb о состоянии вводится, относительно полностью заряженной электроэнергии высоковольтного аккумулятора 22 и представляется, например, как процентное отношение (%). Аналогично, электронный блок 30 управления принимает информацию ILb о состоянии от секции 24a датчика низковольтного аккумулятора 24. Электронный блок 30 управления вычисляет состояние заряда низковольтного аккумулятора 24 на основе информации, включенной в информацию ILb о состоянии.
Электронный блок 30 управления принимает информацию IM о состоянии от секции 20b датчика мотора-генератора 20. Электронный блок 30 управления вычисляет доступный крутящий момент Tmg мотора-генератора 20 на основе частей информации, такой как входное напряжение, входной ток, температура мотора-генератора 20 и скорость вращения выходного вала 20a, которые включены в информацию IM о состоянии и основываются на состоянии заряда высоковольтного аккумулятора 22. Другими словами, электронный блок 30 управления функционирует как секция 30b вычисления крутящего момента. Кроме того, на основе вычисленного доступного крутящего момента Tmg и т.п., электронный блок 30 управления вычисляет диапазон угла остановки для угла CA поворота коленчатого вала, в котором двигатель 10 может быть перезапущен посредством прокручивания коленчатого вала мотором-генератором 20, в качестве допустимого диапазона CAa угла поворота коленчатого вала. Другими словами, электронный блок 30 управления функционирует как секция 30c вычисления допустимого угла.
На основе сигналов, вводимых от различных датчиков и т.п., электронный блок 30 управления формирует сигнал MSen манипулирования для управления двигателем 10 и выводит сигнал MSen манипулирования двигателю 10. В двигателе 10 объем впрыска топлива из клапана впрыска топлива, через который топливо впрыскивается в цилиндр, и степень открытия дроссельной заслонки, посредством которой объем всасываемого воздуха в двигатель 10 регулируется, регулируются в соответствии с сигналом MSen манипулирования. Дополнительно, когда двигатель 10 принимает сигнал MSen манипулирования, который инструктирует автоматическую остановку двигателя 10, впрыск топлива в двигатель 10 прекращается, и дроссельная заслонка закрывается, что, в свою очередь, ограничивает объем всасываемого воздуха в двигатель 10.
На основе сигналов, вводимых от различных датчиков и т.п., электронный блок 30 управления формирует сигнал MSmg манипулирования для управления мотором-генератором 20 и выводит сигнал MSmg манипулирования мотору-генератору 20. В моторе-генераторе 20 величина разряда, когда мотор-генератор 20 функционирует как мотор, или величина формирования мощности, когда мотор-генератор 20 функционирует как генератор мощности, регулируются на основе сигнала MSmg манипулирования. Дополнительно, когда двигатель 10 перезапускается после автоматической остановки, электронный блок 30 управления выводит сигнал MSmg манипулирования, который инструктирует проворачивание коленчатого вала двигателя 10 перед началом впрыска топлива. Как описано таким образом, электронный блок 30 управления функционирует как секция 30d управления приводом, которая управляет автоматической остановкой и перезапуском двигателя 10.
Объем впрыска топлива, требуемый, чтобы предоставлять возможность работы двигателя 10 на холостом ходу, хранится в секции памяти электронного блока 30 управления при предположении, что двигатель 10 находится в заводском состоянии по умолчанию, в котором двигатель 10 не имеет износа или т.п., и что двигатель 10 находится в идеальном состоянии, в котором двигатель 10 произведен без ошибок согласно спецификациям. В настоящем варианте осуществления термин "работа на холостом ходу" обозначает состояние работы двигателя 10 при минимальной скорости Ne вращения двигателя, при которой двигатель 10 может работать независимо и непрерывно без помощи мотора-генератора 20. Дополнительно, объем впрыска топлива в идеальном состоянии и в режиме работы на холостом ходу предварительно вычисляются посредством выполнения тестов, моделирований и т.п.
Соотношение между углом остановки коленчатого вала 10a двигателя 10, находящегося в идеальном состоянии, и пусковым крутящим моментом, требуемым для перезапуска двигателя 10, который был остановлен, хранится в секции памяти электронного блока 30 управления. Как показано на фиг. 2 и 3, соотношение между углом остановки коленчатого вала 10a и пусковым крутящим моментом двигателя 10 циклически изменяется каждые 180 CA.
Подробно, пусковой крутящий момент двигателя 10 постепенно становится больше пропорционально увеличению от 0 CA угла остановки коленчатого вала 10a и достигает своего наибольшего значения при заданном угле остановки. Угол остановки коленчатого вала 10a, при котором пусковой крутящий момент максимизируется, находится, например, рядом с углом CA поворота коленчатого вала, при котором впускной клапан цилиндра, который находится в такте сжатия, когда двигатель 10 остановлен, закрывается. После того как пусковой крутящий момент максимизируется, пусковой крутящий момент двигателя 10 постепенно становится меньше пропорционально увеличению угла остановки коленчатого вала 10a и становится минимальным пусковым крутящим моментом Ts при заданном угле остановки. Угол остановки коленчатого вала 10a, при котором пусковой крутящий момент становится минимальным пусковым крутящим моментом Ts, находится, например, слегка перед углом CA поворота коленчатого вала, при котором выпускной клапан цилиндра, который находится в такте расширения, когда двигатель 10 остановлен, открывается. После этого, пусковой крутящий момент двигателя 10 постепенно становится больше пропорционально приближению к 180 CA угла остановки коленчатого вала 10a. Соотношение между углом остановки коленчатого вала 10a, находящимся в идеальном состоянии, и пусковым крутящим моментом предварительно вычисляется посредством выполнения тестов, моделирований и т.п. Электронный блок 30 управления вычисляет пусковой крутящий момент, требуемый для перезапуска двигателя на основе объема Qf впрыска топлива для двигателя 10 или на основе соотношения между углом остановки коленчатого вала 10a и пусковым крутящим моментом двигателя 10. Другими словами, электронный блок 30 управления функционирует как секция 30e вычисления пускового крутящего момента.
Конкретное время X1, в которое необходимо вычислять период отрицательного давления в цилиндре, в котором давление в цилиндре двигателя 10 является отрицательным давлением относительно атмосферного давления после начала автоматической остановки двигателя 10, хранится в секции памяти электронного блока 30 управления. Подробно, как показано на фиг. 4. свежий всасываемый воздух не подается в цилиндр двигателя 10 после момента времени t1, в который автоматическая остановка двигателя 10 начинается, так что впрыск топлива прекращается, и в который дроссельная заслонка закрывается. С другой стороны, коленчатый вал 10a продолжает вращаться в течение некоторого времени вследствие инерции, и газ в цилиндре выпускается в качестве выхлопного газа. Следовательно, когда автоматическая остановка двигателя 10 начинается, давление в цилиндре становится отрицательным давлением относительно атмосферного давления. Хотя внутренность цилиндра остается в состоянии отрицательного давления в течение некоторого времени после момента времени t2, в который коленчатый вал 10a полностью останавливается, газ протекает в цилиндр из небольшого зазора между внутренней периферийной поверхностью цилиндра и поршнем или из зазора дроссельной заслонки. Следовательно, давление в цилиндре постепенно приближается к атмосферному давлению, после того как коленчатый вал 10a полностью останавливается, и давление в цилиндре становится практически равным атмосферному давлению после момента времени t3.
В настоящем варианте осуществления период времени с момента времени t2, в который вращение коленчатого вала 10a полностью останавливается, так что скорость Ne вращения двигателя для двигателя 10 достигает нуля, пока давление в цилиндре не станет равным атмосферному давлению, хранится в секции памяти электронного блока 30 управления в качестве конкретного времени X1. Другими словами, момент времени, в который конкретное время X1 проходит с момента времени t2, в который скорость Ne вращения двигателя для двигателя 10 достигает нуля, является предельным временем t3 проворачивания коленчатого вала. Конкретное время X1 (предельное время t3 проворачивания коленчатого вала) надлежащим образом определяется в соответствии со спецификациями двигателя 10, спецификациями мотора-генератора 20 и сочетания двигателя 10 и мотора-генератора 20. Конкретное время X1 предварительно вычисляется посредством выполнения тестов, моделирований и т.п. и равно, например, нескольким секундам.
Далее, будет предоставлено описание процесса автоматической остановки-перезапуска двигателя 10 посредством электронного блока 30 управления. В состоянии, в котором двигатель 10 работает (состояние, в котором двигатель 10 автоматически не остановлен), следующий процесс автоматической остановки-перезапуска циклически выполняется в каждом заданном периоде управления.
Когда процесс автоматической остановки-перезапуска начинается, процесс электронного блока 30 управления переходит к этапу S11, как показано на фиг. 5. На этапе S11 электронный блок 30 управления определяет, находится ли двигатель 10 в режиме работы на холостом ходу. Подробно, электронный блок 30 управления определяет, что двигатель 10 находится в режиме работы на холостом ходу при удовлетворении условия, что скорость Ne вращения двигателя для двигателя 10 ниже или равна заданной скорости вращения, условие, что температура THW охлаждающей жидкости выше или равна заданной температуре, условие, что состояние заряда высоковольтного аккумулятора 22 выше или равно заданному значению, условие, что состояние заряда низковольтного аккумулятора 24 выше или равно заданному значению, условие, что нагрузка неэлектрических вспомогательных устройств (например, компрессора для кондиционирования воздуха) соединенных с возможностью привода с коленчатым валом 10a меньше или равно заданному значению и т.п. Если электронный блок 30 управления определяет, что двигатель 10 не находится в режиме работы на холостом ходу (Нет на этапе S11), процесс электронного блока 30 управления пропускает этапы S12-S14, описанные позже, и переходит к этапу S15. Если электронный блок 30 управления определяет, что двигатель 10 находится в режиме холостого хода (Да на этапе S11), процесс электронного блока 30 управления переходит к этапу S12.
На этапе S12, на основе объема Qf впрыска топлива двигателя 10, когда этап S12 выполняется, электронный блок 30 управления вычисляет минимальный пусковой крутящий момент Ts, требуемый для перезапуска двигателя 10, если двигатель 10 автоматически останавливается. Подробно, как показано на фиг. 3, соотношение между углом остановки коленчатого вала 10a двигателя 10, который находится в идеальном состоянии, и пусковым крутящим моментом, требуемым для перезапуска двигателя 10, который был остановлен, сохраняется в секции памяти электронного блока 30 управления, и минимальный пусковой крутящий момент Ts1 также предварительно сохраняется в ней. Дополнительно, объем впрыска топлива, требуемого для работы двигателя 10 на холостом ходу, находящегося в идеальном состоянии, сохраняется в секции памяти электронного блока 30 управления. Если отложения и т.п. накапливаются на цилиндре или на поршне двигателя 10, так что сопротивление трения становится большим, минимальный пусковой крутящий момент Ts, требуемый для перезапуска двигателя 10, становится больше минимального пускового крутящего момента Ts1 в идеальном состоянии, как показано на фиг. 3 (показано на фиг. 3 как минимальные пусковые крутящие моменты Ts2 и Ts3). Дополнительно, объем впрыска топлива, требуемого для работы двигателя 10 на холостом ходу, также становится больше. Дополнительно, существует положительная корреляция между приращением минимального пускового крутящего момента Ts и приращением объема впрыска топлива, требуемого для работы двигателя 10 на холостом ходу. Следовательно, электронный блок 30 управления вычисляет минимальный пусковой крутящий момент Ts, так что чем больше превышение объема Qf впрыска топлива двигателя 10, когда этап S12 выполняется относительно предварительно сохраненного объема впрыска топлива, тем больше становится превышение минимального пускового крутящего момента Ts относительно предварительно сохраненного минимального пускового крутящего момента Ts1 в идеальном состоянии. После вычисления минимального пускового крутящего момента Ts процесс электронного блока 30 управления переходит к этапу S13.
На этапе S13 электронный блок 30 управления вычисляет доступный крутящий момент Tmg мотора-генератора 20 на основе информации IM о состоянии, отправленной из секции 20b датчика мотора-генератора 20, и информации IHb о состоянии, отправленной из секции 22a датчика высоковольтного аккумулятора 22. Подробно, на основе информации IM о состоянии, электронный блок 30 управления идентифицирует соотношение между скоростью вращения выходного вала 20a мотора-генератора 20 и входным током. Например, доступный крутящий момент Tmg, вычисленный посредством электронного блока 30 управления, становится меньше пропорционально уменьшению скорости вращения выходного вала 20a для некоторого входного тока. Кроме того, на основе информации IHb о состоянии, электронный блок 30 управления вычисляет состояние заряда высоковольтного аккумулятора 22. Если это состояние заряда ниже или равно некоторому значению, доступный крутящий момент Tmg, вычисленный посредством электронного блока 30 управления, становится меньше пропорционально уменьшению состояния заряда. После вычисления доступного крутящего момента Tmg процесс электронного блока 30 управления переходит к этапу S14.
На этапе S14 электронный блок 30 управления определяет, действительно ли значение, полученное вычитанием минимального пускового крутящего момента Ts из доступного крутящего момента Tmg, больше или равно пороговому значению Tx. Даже если ошибка вычисления в доступном крутящем моменте Tmg или в минимальном пусковом крутящем моменте Ts возникает, пороговое значение Tx предварительно устанавливается в положительное значение, так что электронный блок 30 управления может определять, что доступный крутящий момент Tmg больше минимального пускового крутящего момента Ts. Если электронный блок 30 управления определяет, что значение, полученное вычитанием минимального пускового крутящего момента Ts из доступного крутящего момента Tmg меньше порогового значения Tx (Нет на этапе S14), последовательности этапов процесса автоматической остановки-перезапуска заканчиваются. Другими словами, в этом случае, автоматическая остановка двигателя 10 запрещается, и автоматическая остановка не выполняется. Если электронный блок 30 управления определяет, что значение, полученное вычитанием минимального пускового крутящего момента Ts из доступного крутящего момента Tmg, больше или равно пороговому значению Tx (Да на этапе S14), процесс электронного блока 30 управления переходит к этапу S15.
На этапе S15 электронный блок 30 управления определяет, все ли условия для автоматической остановки двигателя 10 удовлетворяются. Условия для автоматической остановки двигателя 10 включают в себя условие, что скорость SP транспортного средства, обнаруженная посредством датчика 32 скорости транспортного средства, ниже или равна заданной скорости, условие, что скорость Ne вращения двигателя для двигателя 10 ниже или равна заданной скорости вращения, условие, что педаль акселератора транспортного средства не нажата, условие, что нагрузка неэлектрического вспомогательного устройства, соединенного с возможностью привода с коленчатым валом 10a, меньше или равна заданному значению, условие, что состояние заряда высоковольтного аккумулятора 22 выше или равно некоторому значению, условие, что состояние заряда низковольтного аккумулятора 24 выше или равно некоторому значению, и т.п. Если электронный блок 30 управления определяет, что, по меньшей мере, одно из условий для автоматической остановки двигателя 10 не удовлетворяется (Нет на этапе S15), последовательности этапов процесса автоматической остановки-перезапуска заканчиваются. Другими словами, в этом случае, двигатель 10 автоматически не останавливается. Если электронный блок 30 управления определяет, что все условия для автоматической остановки двигателя 10 удовлетворяются (Да на этапе S15), процесс электронного блока 30 управления переходит к этапу S16.
На этапе S16 электронный блок 30 управления выводит сигнал MSen манипулирования двигателю 10, и, в результате, впрыск топлива в двигателе 10 прекращается, и дроссельная заслонка закрывается. Другими словами, электронный блок 30 управления начинает автоматическую остановку двигателя 10. После того как этап S16 начинается, двигатель 10 не работает, и, следовательно, этап S11 никогда не начинается, даже если заданный период управления прошел. После того как этап S16 выполняется, процесс электронного блока 30 управления переходит к этапу S17.
На этапе S17 электронный блок 30 управления выводит сигнал MSmg манипулирования мотору-генератору 20 и прикладывает крутящий момент к мотору-генератору 20 или к коленчатому валу 10a, и, в результате, угол остановки коленчатого вала 10a регулируется. Режим работы коленчатого вала 10a отображается, когда двигатель 10 останавливается, изменяется вследствие незначительного, зависящего от времени изменения двигателя 10, незначительного изменения во внешнем окружении и т.п. Следовательно, в некоторых случаях, угол остановки, при котором остановка фактически происходит, отклоняется приблизительно от нескольких градусов до нескольких десятков градусов от целевого угла остановки, даже если угол остановки коленчатого вала 10a регулируется, как описано выше. После того как этап S17 выполняется, процесс электронного блока 30 управления переходит к этапу S18.
На этапе S18, на основе угла CA поворота коленчатого вала, обнаруженного посредством датчика 31 угла поворота коленчатого вала, электронный блок 30 управления вычисляет абсолютное значение величины уменьшения скорости Ne вращения двигателя для двигателя 10 в единицу времени в качестве величины ΔNe изменения. После этого, на основе вычисленной величины ΔNe изменения, электронный блок 30 управления повторно вычисляет минимальный пусковой крутящий момент Ts. Подробно, электронный блок 30 управления вычисляет минимальный пусковой крутящий момент Ts как большее значение пропорционально к увеличению в величине ΔNe изменения (пропорционально увеличению в сниженной скорости для скорости Ne вращения двигателя). На этапе S19, следующим за этапом S18, электронный блок 30 управления вычисляет доступный крутящий момент Tmg мотора-генератора 20. Способ вычисления доступного крутящего момента Tmg на этапе S19 является таким же, что и способ вычисления, описанный на этапе S13. После вычисления доступного крутящего момента Tmg процесс электронного блока 30 управления переходит к этапу S20.
На этапе S20, на основе минимального пускового крутящего момента Ts, вычисленного на этапе S18 и на основе доступного крутящего момента Tmg, вычисленного на этапе S19, электронный блок 30 управления вычисляет диапазон угла остановки для угла CA поворота коленчатого вала, в котором двигатель 10 может быть перезапущен путем проворачивания посредством мотора-генератора 20, в качестве допустимого диапазона CAa угла поворота коленчатого вала. Подробно, электронный блок 30 управления вычисляет разницу между минимальным пусковым крутящим моментом Ts1 в идеальном состоянии, который хранится в секции памяти, и минимальным пусковым крутящим моментом Ts, вычисленным на этапе S18. После этого, электронный блок 30 управления вычисляет значение, полученное посредством перевода соотношения между углом остановки коленчатого вала 10a и пусковым крутящим моментом в идеальном состоянии, так что крутящий момент становится больше пропорционально вышеупомянутой разнице, в качестве соотношения между углом остановки коленчатого вала 10a и пусковым крутящим моментом, когда этап S20 выполняется. Кроме того, электронный блок 30 управления сравнивает соотношение между углом остановки коленчатого вала 10a и пусковым крутящим моментом, вычисленным, как конкрето выше с доступным крутящим моментом Tmg, и вычисляет диапазон, в котором пусковой крутящий момент становится меньше или равен доступному крутящему моменту Tmg, в качестве допустимого диапазона CAa угла поворота коленчатого вала. После этого процесс электронного блока 30 управления переходит к этапу S21, показанному на фиг. 6.
На этапе S21 электронный блок 30 управления определяет, больше ли допустимый диапазон CAa угла поворота коленчатого вала, вычисленный на этапе S20, заданного конкретного диапазона CAx. Конкретный диапазон CAx фиксируется с учетом ошибок обнаружения датчика 31 угла поворота коленчатого вала или т.п. и равен, например, от нескольких градусов до десятков градусов. Если электронный блок 30 управления определяет, что допустимый диапазон CAa угла поворота коленчатого вала меньше или равен конкретному диапазону CAx (Нет на этапе S21), процесс электронного блока 30 управления переходит к этапу S22.
На этапе S22 электронный блок 30 управления предоставляет возможность мотору-генератору 20 функционировать в качестве мотора и проворачивает коленчатый вал двигателя 10 (вращает коленчатый вал 10a), выводя сигнал MSmg манипулирования к мотору-генератору 20 не позднее предельного времени t3 проворачивания коленчатого вала. В настоящем варианте осуществления каждый этап процесса выполняется в единицах нескольких миллисекунд до нескольких сотен миллисекунд самое большее. С другой стороны, приблизительно от одной секунды до нескольких секунд тратится от начала автоматической остановки двигателя 10 до завершения остановки коленчатого вала 10a. Следовательно, когда процесс достигает этапа S22 через этап S21, коленчатый вал 10a еще не был остановлен или, альтернативно, только что был остановлен. Дополнительно, конкретное время X1 устанавливается в несколько секунд. Следовательно, в настоящем варианте осуществления, этап S22 выполняется, и, в результате, в двигателе 10 надежно проворачивается коленчатый вал не позднее предельного времени t3 проворачивания коленчатого вала. На этапе S23 следом за этим электронный блок 30 управления выводит сигнал MSen манипулирования двигателю 10, и, в результате, впрыск топлива возобновляется в двигатель 10. В это время, дроссельная заслонка также открывается в ответ на возобновление впрыска топлива. После этого, последовательности этапов процесса автоматической остановки-перезапуска прекращаются. В этом случае, двигатель 10 перезапускается, прежде чем коленчатый вал 10a полностью останавливается, хотя автоматическая остановка двигателя 10 начинается.
С другой стороны, если электронный блок 30 управления определяет на этапе S21, что допустимый диапазон CAa угла поворота коленчатого вала больше конкретного диапазона CAx (Да на этапе S21), процесс электронного блока 30 управления переходит к этапу S24.
На этапе S24 электронный блок 30 управления ожидает, пока коленчатый вал 10a не остановится. После этого угол CA поворота коленчатого вала, когда коленчатый вал 10a останавливается, обнаруживается в качестве угла CAs остановки. Если угол CAs остановки был обнаружен (Да на этапе S24), процесс электронного блока 30 управления переходит к этапу S25.
На этапе S25 электронный блок 30 управления сравнивает угол CAs остановки, обнаруженный на этапе S24, с допустимым диапазоном CAs угла поворота коленчатого вала, вычисленным на этапе S20. После этого электронный блок 30 управления определяет, попадает ли угол CAs остановки в допустимый диапазон CAa угла поворота коленчатого вала. Если электронный блок 30 управления определяет, что угол CAs остановки попадает в допустимый диапазон CAa угла поворота коленчатого вала (Да на этапе S25), процесс электронного блока 30 управления переходит к этапу S26.
На этапе S26 электронный блок 30 управления определяет, существует ли запрос на перезапуск двигателя 10, который был автоматически остановлен. В настоящем предпочтительном варианте осуществления запрос на перезапуск двигателя 10 выполняется с учетом того факта, что, по меньшей мере, одно из вышеупомянутых условий для автоматической остановки двигателя 10 больше не удовлетворяется. Если электронный блок 30 управления определяет, что не существует запрос на перезапуск двигателя 10 (Нет на этапе S26), электронный блок 30 управления выполняет этап S26 снова. Другими словами, электронный блок 30 управления ожидает, пока запрос на перезапуск двигателя 10 не будет выполнен. С другой стороны, если электронный блок 30 управления определяет, что существует запрос на перезапуск двигателя 10 (Да на этапе S26), процесс электронного блока 30 управления переходит к этапу S27.
На этапе S27 электронный блок 30 управления предоставляет возможность мотору-генератору 20 функционировать в качестве мотора и проворачивает коленчатый вал двигателя 10 (вращает коленчатый вал 10a), выводя сигнал MSmg манипулирования мотору-генератору 20. В соответствии с этим, электронный блок 30 управления выводит сигнал MSen манипулирования двигателю 10, и, в результате, впрыск топлива возобновляется в двигателе 10, и дроссельная заслонка открывается. Другими словами, электронный блок 30 управления перезапускает двигатель 10, который был автоматически остановлен. После этого, последовательности этапов процесса автоматической остановки-перезапуска прекращаются.
С другой стороны, если угол CAs остановки не может быть обнаружен на этапе S24 (Нет на этапе S24), процесс электронного блока 30 управления переходит к этапу S28. Например, случай, в котором сигнал от датчика 31 угла поворота коленчатого вала теряется вследствие того, что датчик 31 угла поворота коленчатого вала находится в нерабочем состоянии, или случай, в котором заметно ненормальное значение показывается вследствие того, что шумы накладываются на сигнал, выдаваемый от датчика 31 угла поворота коленчатого вала, может быть предположен в качестве ситуации, в которой угол CAs остановки не может быть вычислен. Аналогично, если электронный блок 30 управления определяет на этапе S25, что угол CAs остановки находится за пределами допустимого диапазона CAs угла поворота коленчатого вала (Нет на этапе S25), процесс электронного блока 30 управления переходит к этапу S28.
На этапе S28 электронный блок 30 управления предоставляет возможность мотору-генератору 20 функционировать в качестве мотора и проворачивает коленчатый вал двигателя 10, выводя сигнал MSmg манипулирования к мотору-генератору 20 не позднее предельного значения t3 времени проворачивания коленчатого вала. В настоящем предпочтительном варианте осуществления этап S28 выполняется без времени ожидания следом за этапом S24 или следом за этапом S25. Дополнительно, каждый этап процесса выполняется в единицах от нескольких миллисекунд до нескольких сотен миллисекунд самое большее. С другой стороны, конкретное время X1 устанавливается в несколько секунд. Следовательно, в настоящем варианте осуществления, этап S28 выполняется, и, в результате, двигатель 10 надежно проворачивает коленчатый вал не позднее предельного времени t3 проворачивания коленчатого вала. Следом за этапом S28 процесс электронного блока 30 управления переходит к этапу S29.
На этапе S29 электронный блок 30 управления определяет, существует ли запрос на перезапуск двигателя 10, который был автоматически остановлен. Это содержимое определения является таким же как и в процессе, выполненном на этапе S26. Если электронный блок 30 управления определяет, что существует запрос на перезапуск двигателя 10 (Да на этапе S29), процесс электронного блока 30 управления переходит к этапу S30.
На этапе S30 электронный блок 30 управления выводит сигнал MSen манипулирования двигателю 10, и, в результате, впрыск топлива возобновляется в двигатель 10. В это время, дроссельная заслонка также открывается в ответ на возобновление впрыска топлива. После этого, последовательности этапов процесса автоматической остановки-перезапуска прекращаются. В этом случае, двигатель 10 перезапускается в состоянии, в котором коленчатый вал 10a вращается посредством мотора-генератора 20, хотя автоматическая остановка двигателя 10 выполняется.
С другой стороны, если электронный блок 30 управления определяет на этапе S29, что не существует запрос на перезапуск двигателя 10 (Нет на этапе S29), процесс электронного блока 30 управления переходит к этапу S31. На этапе S31 электронный блок 30 управления определяет, может ли отрицательное давление быть сформировано в каждом цилиндре двигателя 10, предоставляя возможность мотору-генератору 20 проворачивать коленчатый вал двигателя 10. Подробно, электронный блок 30 управления определяет, что отрицательное давление может быть сформировано, если состояние заряда высоковольтного аккумулятора 22 выше или равно заданному некоторому значению. Если электронный блок 30 управления определяет, что отрицательное давление не может быть сформировано, процесс электронного блока 30 управления переходит к этапу S30, и двигатель 10 перезапускается. Другими словами, в этом случае, двигатель 10 перезапускается независимо от присутствия или отсутствия запроса на перезапуск двигателя 10.
С другой стороны, если электронный блок 30 управления определяет на этапе S31, что отрицательное давление может быть сформировано (Да на этапе S31), процесс электронного блока 30 управления переходит к этапу S32. На этапе S32, проворачивание коленчатого вала двигателя 10 посредством мотора-генератора 20, который был запущен на этапе S28, упомянутом выше, непрерывно выполняется. После этого, процесс электронного блока 30 управления переходит к этапу S33.
На этапе S33 электронный блок 30 управления определяет, было ли состояние отрицательного давления относительно атмосферного давления повторно сформировано в каждом цилиндре двигателя 10. Подробно, на основе угла CA поворота коленчатого вала, обнаруженного посредством датчика 31 угла поворота коленчатого вала, электронный блок 30 управления определяет, прошел ли конкретный период времени после начала проворачивания коленчатого вала двигателя 10 посредством мотора-генератора 20, на этапе S28. В настоящем варианте осуществления конкретный период определяется как период времени с момента, когда коленчатый вал двигателя 10 проворачивается посредством мотора-генератора 20, до момента, когда коленчатый вал 10a двигателя поворачивается на некоторый угол. Этот некоторый угол равен, например, от нескольких сотен до нескольких тысяч градусов (равен нескольким оборотам коленчатого вала 10a). Если конкретный период не прошел после начала проворачивания коленчатого вала двигателя 10, электронный блок 30 управления определяет, что отрицательное давление еще не было сформировано (Нет на этапе S33), и процесс электронного блока 30 управления возвращается к этапу S31. С другой стороны, если конкретный период прошел после начала проворачивания коленчатого вала двигателя 10, электронный блок 30 управления определяет, что отрицательное давление было сформировано (Да на этапе S33), и процесс электронного блока 30 управления переходит к этапу S17, показанному на фиг. 5. После этого, электронный блок 30 управления повторно выполняет процесс этапа S17 и этапов, следующих за этапом S17.
Действие и преимущества настоящего варианта осуществления теперь будут описаны.
При предоставлении возможности проворачивания коленчатого вала двигателя 10, который был автоматически остановлен, посредством мотора-генератора 20 как в вышеупомянутом варианте осуществления, предпочтительно формировать конфигурацию, в которой проворачивание коленчатого вала может быть начато посредством мотора-генератора 20 независимо от угла CAs остановки коленчатого вала 10a. Следовательно, мотор-генератор 20, в целом, проектируется так, что доступный крутящий момент Tmg1 мотора-генератора 20 превышает пусковой крутящий момент независимо от угла CAs остановки коленчатого вала 10a, когда ухудшение не произошло в выходных характеристиках мотора-генератора 20, и когда состояние заряда высоковольтного аккумулятора 22, который подает электрическую мощность к мотору-генератору 20, является достаточным (например, не менее 50%), как показано на фиг. 2.
Возможен случай, в котором зависящее от времени ухудшение возникает в выходных характеристиках мотора-генератора 20, даже если мотор-генератор 20 проектируется, как описано выше. В этом случае, например, доступный крутящий момент Tmg мотора-генератора 20 понижается с доступного крутящего момента Tmg1, при котором зависящее от времени ухудшение не возникает, до доступного крутящего момента Tmg2, как показано на фиг. 2. Следовательно, разница между доступным крутящим моментом Tmg2 и минимальным пусковым крутящим моментом Ts становится меньше разницы между доступным крутящим моментом Tmg1 и минимальным пусковым крутящим моментом Ts. Дополнительно, доступный крутящий момент Tmg2 превышает пусковой крутящий момент только в допустимом диапазоне CAa1 угла поворота коленчатого вала от угла A1 остановки до угла A2 остановки, и допустимый диапазон CAa угла поворота коленчатого вала становится более узким.
Кроме того, если состояние заряда высоковольтного аккумулятора 22 является небольшим, и если выходное напряжение или выходной ток, которые могут быть выведены мотору-генератору 20, становятся меньшими, доступный крутящий момент Tmg мотора-генератора 20 снижается до меньшего доступного крутящего момента Tmg3. В результате, разница между доступным крутящим моментом Tmg3 и минимальным пусковым крутящим моментом Ts становится даже меньшей. Дополнительно, доступный крутящий момент Tmg3 превышает пусковой крутящий момент только в допустимом диапазоне CAa2 угла поворота коленчатого вала для угла A3 остановки до угла A4 остановки, и допустимый диапазон CAa угла поворота коленчатого вала становится еще более узким.
С другой стороны, существует случай, в котором изменение происходит в пусковом крутящем моменте в двигателе 10, даже если изменение не вызывается в выходных характеристиках мотора-генератора 20, как описано выше. Подробно, пусковой крутящий момент становится более значительным по сравнению с пусковым крутящим моментом в идеальном состоянии, если отложения накапливаются на различных частях, таких как цилиндры и поршни двигателя 10, так что сопротивление трения становится более значительным, как показано на фиг. 3. В результате, как показано на фиг. 3, минимальный пусковой крутящий момент Ts двигателя 10 увеличивается от минимального пускового крутящего момента Ts1 в идеальном состоянии пропорционально увеличению в величине накопления отложений, как показано посредством минимального пускового крутящего момента Ts2 и посредством минимального пускового крутящего момента Ts3. В результате, разница между доступным крутящим моментом Tmg и минимальным пусковым крутящим моментом Ts становится меньшей. Дополнительно, доступный диапазон CAa угла поворота коленчатого вала становится более узким, как показано посредством допустимого диапазона CAa3 угла поворота коленчатого вала от угла B1 остановки до угла B2 остановки и посредством допустимого диапазона CAa4 угла поворота коленчатого вала от угла B3 остановки до угла B4 остановки.
В вышеупомянутом варианте осуществления двигатель 10 автоматически не останавливается, если значение, полученное вычитанием минимального пускового крутящего момента Ts из доступного крутящего момента Tmg, меньше порогового значения Tx (см. этап S14 на фиг. 5). Другими словами, автоматическая остановка двигателя 10 запрещается, если допустимый диапазон CAa угла поворота коленчатого вала является очень узким или не существует. Следовательно, автоматическая остановка двигателя 10 не происходит несмотря на тот факт, что коленчатый вал двигателя 10 не может быть провернут посредством мотора-генератора 20.
В качестве примера, является возможным то, что коленчатый вал двигателя 10 может быть провернут посредством мотора-генератора 20, если угол CAs остановки коленчатого вала 10a, когда двигатель 10 остановлен, находится в допустимом диапазоне CAa угла поворота коленчатого вала. Однако, если допустимый диапазон CAa угла поворота коленчатого вала является очень узким, вероятность того, что угол CAs остановки попадет в допустимый диапазон CAa угла поворота коленчатого вала, является низкой. Дополнительно, некоторая ошибка может возникать, когда угол CAs остановки обнаруживается, как описано выше. Следовательно, даже если угол CAs остановки попадает в допустимый диапазон CAa угла поворота коленчатого вала с точки зрения значения обнаружения датчика 31 угла поворота коленчатого вала, вероятность того, что угол CAs остановки фактического коленчатого вала 10a будет отклоняться от допустимого диапазона CAa угла поворота коленчатого вала, является высокой, если допустимый диапазон CAa угла поворота коленчатого вала является узким.
В вышеупомянутом варианте осуществления коленчатый вал двигателя 10 проворачивается посредством мотора-генератора 20, если допустимый диапазон CAa угла поворота коленчатого вала меньше или равен конкретному диапазону CAx (см. этап S21 и этап S22 на фиг. 6). Следовательно, коленчатый вал 10a ограничивается от остановки с углом CAs остановки, при котором коленчатый вал двигателя 10 не может быть провернут посредством мотора-генератора 20.
В вышеупомянутом варианте осуществления определяется, попадает ли угол CAs остановки в допустимый диапазон CAa угла поворота коленчатого вала, когда допустимый диапазон CAa угла поворота коленчатого вала шире конкретного диапазона CAx. Если угол CAs остановки находится за пределами допустимого диапазона CAa угла поворота коленчатого вала, становится невозможно начинать проворачивание коленчатого вала двигателя 10 посредством мотора-генератора 20.
В этом аспекте, в вышеупомянутом варианте осуществления, если угол CAs остановки находится за пределами допустимого диапазона CAa угла поворота коленчатого вала, коленчатый вал двигателя 10 проворачивается посредством мотора-генератора 20, прежде чем период отрицательного давления в цилиндре проходит с момента, когда автоматическая остановка двигателя 10 начинается. Если коленчатый вал двигателя 10 проворачивается таким образом, коленчатый вал 10a никогда не останавливается под углом CAs остановки, при котором перезапуск не может быть выполнен посредством мотора-генератора 20. Следовательно, время не тратится на регулировку позиции остановки коленчатого вала 10a. В результате, если существует запрос на перезапуск двигателя 10, возможно быстро перезапускать двигатель 10.
В периоде отрицательного давления в цилиндре давление в цилиндре двигателя 10 является отрицательным давлением относительно атмосферного давления. Следовательно, возможно вращать коленчатый вал 10a с помощью отрицательного давления внутри цилиндра. Следовательно, если период находится в этом периоде отрицательного давления в цилиндре, возможно начинать проворачивание коленчатого вала двигателя 10 посредством мотора-генератора 20, даже если угол CAs остановки коленчатого вала 10a находится за пределами допустимого диапазона CAa угла поворота коленчатого вала.
В вышеупомянутом варианте осуществления минимальный пусковой крутящий момент Ts вычисляется на основе объема Qf впрыска топлива перед началом автоматической остановки двигателя 10 (перед этапом S16). С другой стороны, после начала автоматической остановки двигателя 10, минимальный пусковой крутящий момент Ts вычисляется с помощью величины ΔNe изменения в единицу времени для скорости Ne вращения двигателя. Величина ΔNe изменения скорости Ne вращения двигателя более непосредственно отражает трение или т.п. между поршнем и цилиндром в двигателе 10 в сравнении с объемом Qf впрыска топлива. Другими словами, величина ΔNe изменения скорости Ne вращения двигателя имеет высокую корреляцию относительно пускового крутящего момента. Опора на характеризуемую таким образом величину ΔNe изменения скорости Ne вращения двигателя делает возможным более точное вычисление допустимого диапазона CAa угла поворота коленчатого вала.
В вышеупомянутом варианте осуществления, когда проворачивание коленчатого вала двигателя 10 посредством мотора-генератора 20 начинается в периоде отрицательного давления в цилиндре двигателя 10, проворачивание коленчатого вала непрерывно выполняется, и отрицательное давление повторно формируется в цилиндре двигателя 10, если существует место в состоянии заряда высоковольтного аккумулятора 22. Если отрицательное давление повторно формируется в цилиндре двигателя 10 посредством непрерывного выполнения проворачивания коленчатого вала в течение или сверх конкретного времени, проворачивание коленчатого вала останавливается. Следовательно, состояние заряда высоковольтного аккумулятора 22 ограничивается от чрезмерного понижения для того, чтобы мотор-генератор 20 непрерывно проворачивал коленчатый вал двигателя 10. Дополнительно, когда проворачивание коленчатого вала двигателя 10 останавливается, отрицательное давление повторно формируется, как описано выше, и, следовательно, возможно опять создавать ситуацию, в которой двигатель 10 был автоматически остановлен. Выполняемое таким образом управление делает возможным снова выполнять последовательность этапов процесса, последующего за началом автоматической остановки двигателя 10.
С другой стороны, если состояние заряда высоковольтного аккумулятора 22 ниже или равно некоторому значению после начала проворачивания коленчатого вала двигателя 10 посредством мотора-генератора 20 в периоде отрицательного давления в цилиндре двигателя 10, впрыск топлива в двигатель 10 возобновляется, и двигатель 10 перезапускается. Другими словами, если ситуация, в которой коленчатый вал двигателя 10 проворачивается посредством мотора-генератора 20, продолжается в течение длительного времени, впрыск топлива в двигатель 10 возобновляется. Следовательно, для того, чтобы мотор-генератор 20 непрерывно проворачивал коленчатый вал двигателя 10, возможно ограничивать состояние заряда высоковольтного аккумулятора 22 от чрезмерного снижения.
Настоящий вариант осуществления может быть модифицирован следующим образом. Настоящий вариант осуществления и последующие модификации могут быть объединены, пока объединенные модификации остаются технически согласующимися друг с другом.
Режим, в котором двигатель 10 и мотор-генератор 20 соединяются с возможностью привода вместе, не ограничивается вышеупомянутым вариантом осуществления. Дополнительно, механизм замедления состоит, например, из множества зубчатых передач, муфты сцепления, которая соединяет/разъединяет путь передачи приводного усилия, и т.п., в дополнение к первому шкиву 12, приводному ремню 13 и второму шкиву 14, может быть вставлен между двигателем 10 и мотором-генератором 20.
Выходное напряжение высоковольтного аккумулятора 22 и выходное напряжение низковольтного аккумулятора 24 не имеют значения. Дополнительно, выходное напряжение низковольтного аккумулятора 24 необязательно должно быть ниже выходного напряжения высоковольтного аккумулятора 22, и оба выходных напряжения могут быть равны друг другу.
Вид высоковольтного аккумулятора 22 и вид низковольтного аккумулятора 24 не ограничиваются примерами вышеупомянутого варианта осуществления. Например, никель-водородный аккумулятор, NAS-аккумулятор, полностью твердотельный аккумулятор и т.п., помимо литий-ионного аккумулятора и свинцово-кислотного аккумулятора, могут быть применены в качестве высоковольтного аккумулятора 22 и низковольтного аккумулятора 24.
Мотор-генератор, который, главным образом, помогает движущему крутящему моменту двигателя 10, и мотор-генератор, который, главным образом, генерирует электричество посредством крутящего момента от двигателя 10, могут быть предусмотрены отдельно. В этом случае, рекомендуется применять процесс автоматической остановки-перезапуска вышеупомянутого варианта осуществления на моторе-генераторе, который содействует движущему крутящему моменту двигателя 10.
В вышеупомянутом варианте осуществления угол CAs остановки коленчатого вала 10a может быть прогнозным углом CAs остановки без ограничения обнаружением угла CA поворота коленчатого вала, когда коленчатый вал 10a фактически останавливается. Другими словами, прогнозный угол CAs остановки может быть углом CAs остановки, обнаруженным посредством секции 30a обнаружения угла остановки электронного блока 30 управления. Например, возможно прогнозировать угол CAs остановки коленчатого вала 10a, когда двигатель 10 автоматически останавливается, на основе угла CA поворота коленчатого вала, обнаруженного посредством датчика 31 угла поворота коленчатого вала или на основе изменения в скорости Ne вращения двигателя после начала автоматической остановки двигателя 10. В этой модификации возможно выполнять процесс, включающий в себя этап S24 и этапы, следующие за этапом S24, без ожидания остановки коленчатого вала 10a.
Процесс этапов S21-S23 в вышеупомянутом варианте осуществления может быть пропущен, и может быть определено, попадает ли угол CAs остановки в допустимый диапазон CAa угла поворота коленчатого вала, независимо от размера допустимого диапазона CAa угла поворота коленчатого вала (этап S25 может быть выполнен). Если высокая точность может ожидаться в качестве точности обнаружения угла CAs остановки, может быть предпочтительным уменьшать нагрузку обработки электронного блока 30 управления, пропуская процесс этапов S21-S23 в некоторых случаях.
Процесс этапа S31 в вышеупомянутом варианте осуществления может быть пропущен, и проворачивание коленчатого вала двигателя 10 посредством мотора-генератора 20 может непрерывно выполняться независимо от состояния заряда высоковольтного аккумулятора 22. Период времени автоматической остановки двигателя 10, предполагаемый в вышеупомянутом варианте осуществления, равен приблизительно от нескольких минут до десяти с лишним минут самое большее. Дополнительно, состояние заряда высоковольтного аккумулятора 22 управляется так, чтобы попадать в некоторый диапазон (например, 40-70%), в то время как двигатель 10 работает. Следовательно, если максимальное состояние заряда (полное состояние заряда) высоковольтного аккумулятора 22 является надлежащим образом большим, возможно ограничивать состояние заряда высоковольтного аккумулятора 22 от чрезмерного понижения, даже если проворачивание коленчатого вала двигателя 10 посредством мотора-генератора 20 непрерывно выполняется. Дополнительно, если электронное вспомогательное устройство, приводимое в действие посредством высоковольтного аккумулятора 22, не оказывает значительного влияния на движение транспортного средства, даже если состояние заряда высоковольтного аккумулятора 22 чрезмерно понижается, проблема не возникает, даже если проворачивание коленчатого вала двигателя 10 посредством мотора-генератора 20 непрерывно выполняется.
В вышеупомянутом варианте осуществления, если проворачивание коленчатого вала двигателя 10 посредством мотора-генератора 20 начинается в периоде отрицательного давления в цилиндре, впрыск топлива в двигатель 10 может быть возобновлен, и двигатель 10 может быть перезапущен независимо от присутствия или отсутствия запроса перезапуска. Например, когда максимальное состояние заряда высоковольтного аккумулятора 22 является небольшим, состояние заряда высоковольтного аккумулятора 22 склонно снижаться, если проворачивание коленчатого вала посредством мотора-генератора 20 непрерывно выполняется. В этом случае, также эффективным является перезапуск двигателя 10 независимо от состояния заряда высоковольтного аккумулятора 22.
На этапе S14 вышеупомянутого варианта осуществления пороговое значение Tx может быть надлежащим образом изменено, если пороговое значение Tx равно нулю или более. Если пороговое значение Tx установлено в большое значение, вероятность того, что фактический угол остановки коленчатого вала 10a будет размещаться за пределами допустимого диапазона CAa угла поворота коленчатого вала, будет снижена, несмотря на тот факт, что определение этапа S14 является утвердительным. С другой стороны, если пороговое значение Tx устанавливается в небольшое значение, возможность разрешения автоматической остановки двигателя 10 будет увеличиваться.
На этапе S14 вышеупомянутого варианта осуществления допустимо вычитать максимальное значение (максимальный пусковой крутящий момент) пускового крутящего момента двигателя 10 из доступного крутящего момента Tmg мотора-генератора 20 и выполнять сравнение между результирующим значением вычитания и другим пороговым значением, отличающимся от порогового значения Tx. Пусковой крутящий момент смещается в сторону высокого крутящего момента вследствие накопления отложений и т.п. в двигателе 10, как показано на фиг. 3. Следовательно, минимальный пусковой крутящий момент и максимальный пусковой крутящий момент двигателя 10 изменяются вместе друг с другом. Следовательно, также возможно выполнять косвенное сравнение между минимальным пусковым крутящим моментом Ts и пороговым значением Tx, сравнивая значение, полученное вычитанием максимального пускового крутящего момента из доступного крутящего момента Tmg, с пороговым значением.
В вышеупомянутом варианте осуществления минимальный пусковой крутящий момент может быть вычислен на основе объема Qf впрыска топлива, когда двигатель 10 находится в заданном состоянии привода, не считая нахождение в режиме работы на холостом ходу, вместо вычисления минимального пускового крутящего момента Ts на основе объема Qf впрыска топлива, когда двигатель 10 находится в режиме работы на холостом ходу. Например, заданное состояние привода включает в себя состояние, в котором параметры, такие как степень открытия дроссельной заслонки и скорость Ne вращения двигателя в двигателе 10, которые влияют на состояние сгорания в двигателе 10, делаются постоянными. На основе объема Qf впрыска топлива в этом состоянии минимальный пусковой крутящий момент Ts может также быть вычислен.
В вышеупомянутом варианте осуществления процесс этапов S11-S14 может быть пропущен. Пропуск процесса этапов S11-S14 не вызовет проблему, если является маловероятным, что доступный крутящий момент Tmg станет меньше минимального пускового крутящего момента Ts, даже если доступный крутящий момент Tmg мотора-генератора 20 или пусковой крутящий момент двигателя 10 изменяется отчасти, так как разница между доступным крутящим моментом Tmg мотора-генератора 20 и пусковым крутящим моментом двигателя 10 является большой.
Способ вычисления минимального пускового крутящего момента Ts не ограничивается примером вышеупомянутого варианта осуществления. Например, скорость Ne вращения двигателя для двигателя 10 устанавливается в заданную скорость вращения посредством приложения крутящего момента к коленчатому валу 10a от мотора-генератора 20 в состоянии, в котором объем впрыска топлива в двигатель 10 является постоянным без изменения. Если трение в двигателе 10 является большим, и, следовательно, минимальный пусковой крутящий момент Ts является большим, выходной крутящий момент мотора-генератора 20, когда операция управления выполняется, как описано выше, также становится большим. Следовательно, также возможно вычислять минимальный пусковой крутящий момент Ts на основе выходного напряжения или выходного тока мотора-генератора 20 в это время.
Любой способ вычисления допустимого диапазона CAa угла поворота коленчатого вала может быть применен. Например, допустимо отклонять минимальный пусковой крутящий момент Ts, вычисленный на этапе S12, и вычислять допустимый диапазон CAa угла поворота коленчатого вала на основе результирующего значения отклонения вместо вычисления минимального пускового крутящего момента Ts на этапе S18 на основе величины ΔNe скорости Ne вращения двигателя.
Дополнительно, например, доступный диапазон CAa угла поворота коленчатого вала может быть вычислен на основе интегрального значения расстояния движения транспортного средства. Является возможным, что величина накопления отложений в двигателе 10 или ухудшения в выходных характеристиках мотора-генератора 20 имеет корреляцию с интегральным значением расстояния движения транспортного средства. Следовательно, некоторая степень точности может ожидаться, даже когда допустимый диапазон CAa угла поворота коленчатого вала вычисляется на основе интегрального значения расстояния движения.
В дополнение к этому, допустимый диапазон CAa угла поворота коленчатого вала может попадать в заданный фиксированный диапазон, если процесс этапов S21-S23 пропускается.
В вышеупомянутом варианте осуществления допустимый диапазон CAa угла поворота коленчатого вала необязательно требуется вычислять. Например, выражение отношения или т.п., в котором минимальный пусковой крутящий момент Ts двигателя 10, доступный крутящий момент Tmg мотора-генератора 20 и угол CAs остановки коленчатого вала 10a определяются в качестве переменных, предварительно сохраняется в секции памяти электронного блока 30 управления. После этого, на основе значения, полученного посредством этого выражения отношения, может быть определено, находится ли угол CAs остановки в пределах или за пределами диапазона угла остановки для угла поворота коленчатого вала, в котором двигатель 10 может быть прокручен и перезапущен посредством мотора-генератора 20.
Период отрицательного давления в цилиндре может быть фиксированным в качестве конкретного времени от момента времени t1, в котором впрыск топлива остановлен, и дроссельная заслонка закрыта в двигателе 10, вместо фиксации периода отрицательного давления в цилиндре на основе конкретного времени X1 от момента времени t2, в котором коленчатый вал 10a остановлен.
Хотя конкретное время X1 устанавливается в период времени, проходящего с момента времени t2, в котором коленчатый вал 10a останавливается в вышеупомянутом варианте осуществления, настоящее изобретение не ограничивается этим. Например, конкретное время X1 может быть определено как период времени, после того как скорость вращения коленчатого вала 10a (скорость Ne вращения двигателя) достигла заданной скорости вращения.
Хотя конкретное время X1 устанавливается в период времени до тех пор, пока давление в цилиндре двигателя 10 не становится равным атмосферному давлению в вышеупомянутом варианте осуществления, настоящее изобретение не ограничивается этим. Например, конкретное время X1 может быть установлено в период времени до тех пор, пока давление в цилиндре двигателя 10 не станет ниже на предписанное давление по сравнению с атмосферным давлением. В зависимости от характеристик двигателя 10 или мотора-генератора 20, является вероятным, что коленчатый вал двигателя 10 все еще не может быть прокручен посредством мотора-генератора 20 в состоянии, в котором давление в цилиндре двигателя 10 отчасти меньше атмосферного давления. В этом случае коленчатый вал двигателя 10 может быть надежно прокручен посредством установки конкретного времени X1 как в этой модификации.
Хотя конкретный период, в котором давление в цилиндре двигателя 10 опять становится отрицательным давлением, определяется как период времени до тех пор, пока коленчатый вал 10a не повернется на некоторый угол в вышеупомянутом варианте осуществления, это может быть настройкой, определяемой по времени. Если конкретный период определяется по времени, предпочтительным является применение, по меньшей мере, например, приблизительно от нескольких сотен миллисекунд до нескольких секунд.
Хотя двигатель 10 проворачивается мотором-генератором 20 не позднее предельного времени t3 проворачивания коленчатого вала, и затем двигатель 10 перезапускается посредством возобновления впрыска топлива в вышеупомянутом варианте осуществления, проворачивание коленчатого вала двигателя 10 посредством мотора-генератора 20 может быть пропущено. Например, если это происходит непосредственно после начала автоматической остановки двигателя 10, коленчатый вал 10a все еще вращается. Если это период времени, в котором коленчатый вал 10a все еще не был полностью остановлен, как конкрето выше, существует возможность для перезапуска двигателя 10 посредством лишь возобновления впрыска топлива без проворачивания коленчатого вала.
Если определяется, что допустимый диапазон CAa угла поворота коленчатого вала больше конкретного диапазона CAx на этапе S21 вышеупомянутого варианта осуществления, процесс этапов S24-S33, последующих за ним, может быть пропущен. В этом варианте осуществления, если определяется, что допустимый диапазон CAa угла поворота коленчатого вала больше конкретного диапазона CAx, рекомендуется останавливать коленчатый вал 10a, как он есть, и перезапускать двигатель 10 в соответствии с запросом перезапуска.
В двигателе 10 существует конфигурация, такая как электрический впускной клапан, которая приспособлена для регулировки степени открытия (величины подъема) впускного клапана, которая отличается от вращения коленчатого вала 10a. Если двигатель 10 является сконфигурированным таким образом двигателем, также является возможным ограничивать объем всасываемого воздуха в двигатель 10 посредством уменьшения степени открытия впускного клапана, вместо или в дополнение к закрытию дроссельной заслонки, когда двигатель 10 автоматически останавливается.
Если возможно предоставлять возможность транспортному средству двигаться только посредством крутящего момента от мотора-генератора 20 без изменения состояния, в котором впрыск топлива двигателя 10 был остановлен в вышеупомянутом варианте осуществления, транспортному средству может быть предоставлена возможность двигаться посредством крутящего момента от мотора-генератора 20, вместо возобновления впрыска топлива, после того как коленчатый вал двигателя 10 проворачивается посредством мотора-генератора 20.
Электронный блок 30 управления не ограничивается блоком, который выполняет программную обработку по всем процессам, выполняемым им. Например, электронный блок 30 управления может включать в себя, по меньшей мере, часть процессов, выполняемых посредством программного обеспечения в настоящем варианте осуществления, в качестве процесса, который выполняется посредством аппаратных схем, предназначенных для выполнения этих процессов (таких как ASIC). Т.е., электронный блок 30 управления может быть модифицирован, пока он имеет какую-либо конфигурацию из следующих конфигураций (a)-(c). (a) Конфигурация, включающая в себя процессор, который выполняет все из вышеописанных процессов согласно программам, и устройство хранения программ, такое как ROM, которое хранит программы. (b) Конфигурация, включающая в себя процессор и устройство хранения программ, которое выполняет часть вышеописанных процессов согласно программам, и специализированную аппаратную схему, которая выполняет остальные процессы. (c) Конфигурация, включающая в себя специализированную аппаратную схему, которая выполняет все из вышеописанных процессов. Может быть предусмотрено множество схем программной обработки, каждая из которых включает в себя процессор и устройство хранения программ, и множество специализированных аппаратных схем. Т.е., вышеописанные процессы могут выполняться любым образом, пока процессы выполняются схемой обработки, которая включает в себя, по меньшей мере, одну из множества из одной или более схем программной обработки и множества из одной или более специализированных аппаратных схем.
Различные изменения в форме и деталях могут быть выполнены в примерах выше без отступления от духа и рамок формулы изобретения и ее эквивалентов. Примеры существуют только ради описания, а не в целях ограничения. Описания отличительных признаков в каждом примере должно рассматриваться как применимое к аналогичным отличительным признакам или аспектам в других примерах. Подходящие результаты могут быть достигнуты, если последовательности операций выполняются в другом порядке, и/или если компоненты в описанной системе, архитектуре, устройстве или схеме объединяются по-другому, и/или заменяются или дополняются другими компонентами или их эквивалентами. Рамки открытия не определяются подробным описанием, а формулой изобретения и ее эквивалентами. Все вариации в рамках формулы изобретения и ее эквивалентов включены в изобретение.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ЗАПУСКОМ ДВИГАТЕЛЯ ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2560222C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2624481C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА И ТРАНСПОРТНОЕ СРЕДСТВО, ОСНАЩЕННОЕ УСТРОЙСТВОМ УПРАВЛЕНИЯ | 2015 |
|
RU2659600C1 |
| СИСТЕМА СИЛОВОЙ ПЕРЕДАЧИ | 2020 |
|
RU2742307C1 |
| СПОСОБ УПРАВЛЕНИЯ МОТОРОМ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО УПРАВЛЕНИЯ ДВИГАТЕЛЕМ И МОТОРОМ ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2735193C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ЗАПУСКА ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2017 |
|
RU2731985C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2018 |
|
RU2690296C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ЗАПУСКА ДВИГАТЕЛЯ | 2014 |
|
RU2638118C2 |
| ГИБРИДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ ЕГО УПРАВЛЕНИЯ | 2020 |
|
RU2741526C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ ТЕМПЕРАТУРОЙ КАТАЛИЗАТОРА ТРАНСПОРТНОГО СРЕДСТВА | 2020 |
|
RU2747342C1 |
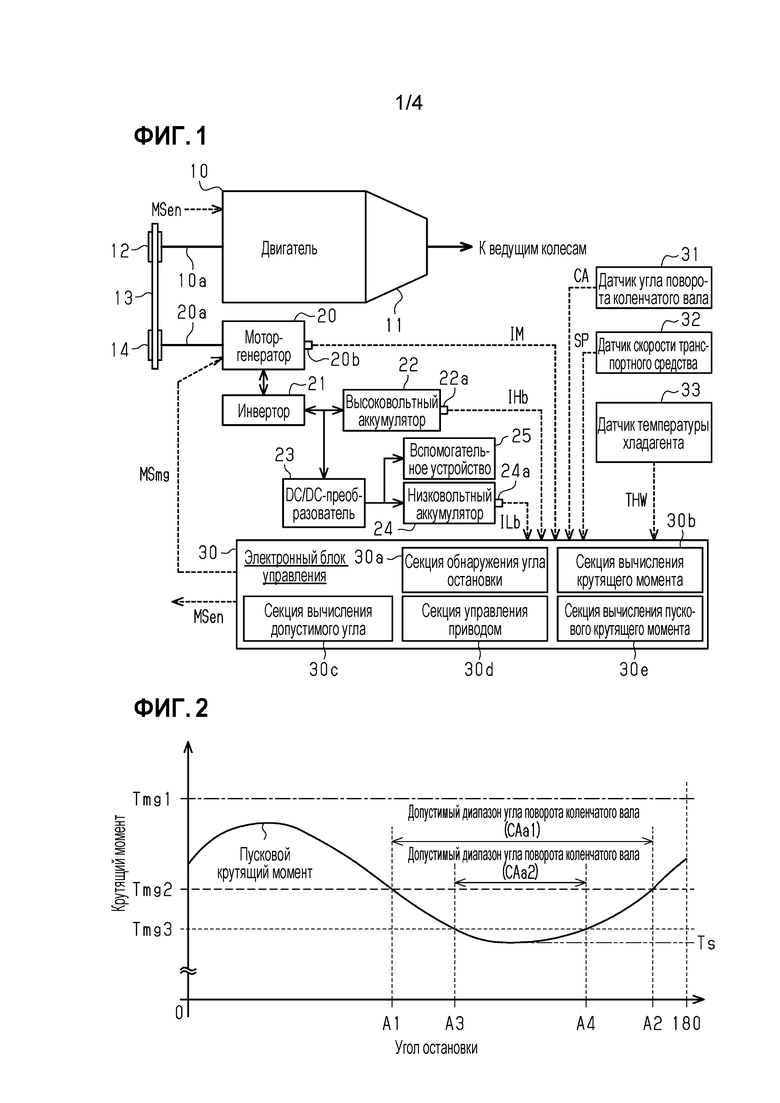
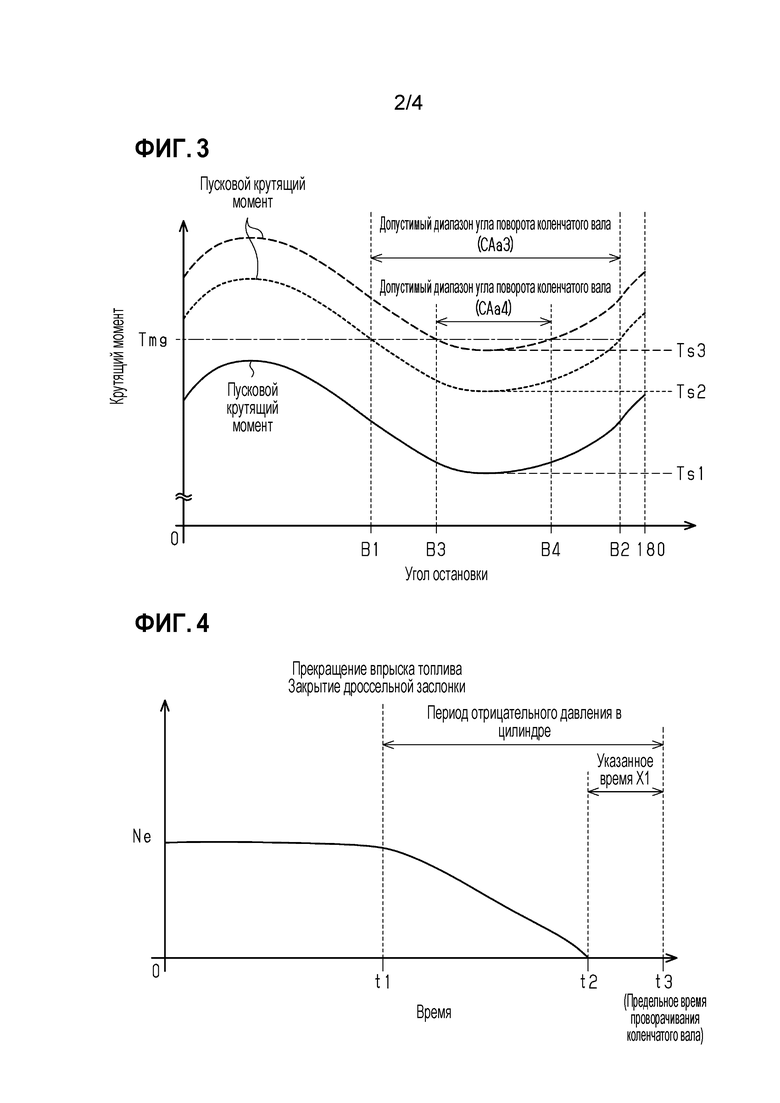
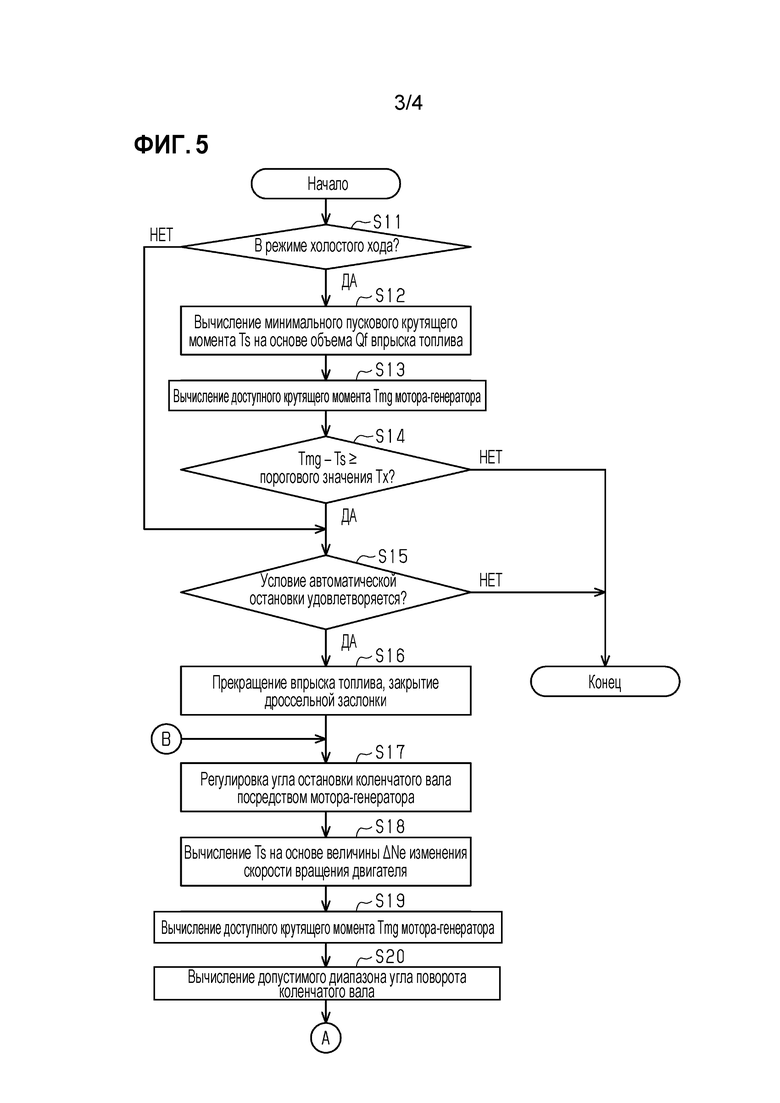
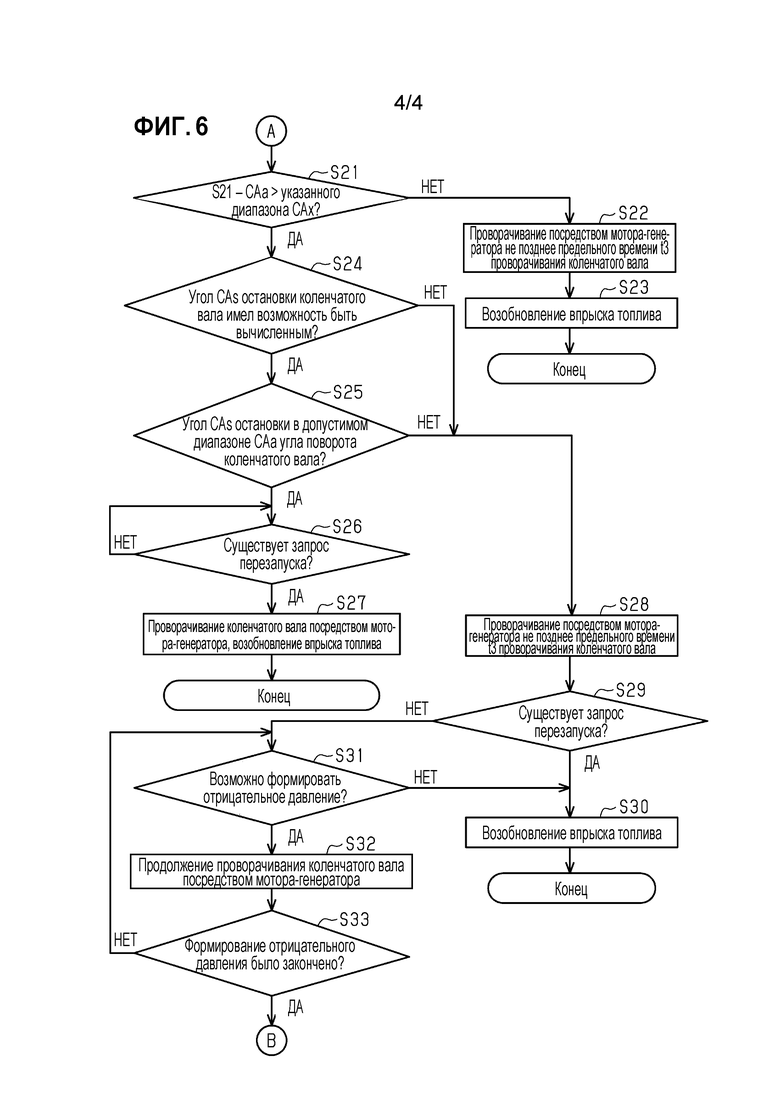
Изобретение относится к гибридному транспортному средству. Контроллер запуска, применяемый в гибридной системе, содержит секцию управления приводом, которая автоматически останавливает двигатель и ограничивает объем всасываемого в него воздуха, останавливая впрыск топлива, при удовлетворении заданного условия и секцию обнаружения угла остановки поворота коленчатого вала, когда двигатель автоматически останавливается. Секция управления приводом выполнена так, что, если угол остановки находится за пределами диапазона угла поворота коленчатого вала, в котором возможно перезапускать двигатель, проворачивая коленчатый вал посредством мотора-генератора, проворачивает коленчатый вал посредством мотора-генератора или перезапускает двигатель, возобновляя впрыск топлива в двигатель, прежде чем период отрицательного давления в цилиндре, определяемый как период времени, в котором давление в цилиндре является отрицательным относительно атмосферного давления, проходит после начала автоматической остановки двигателя. Повышается комфорт. 4 н. и 4 з.п. ф-лы, 6 ил.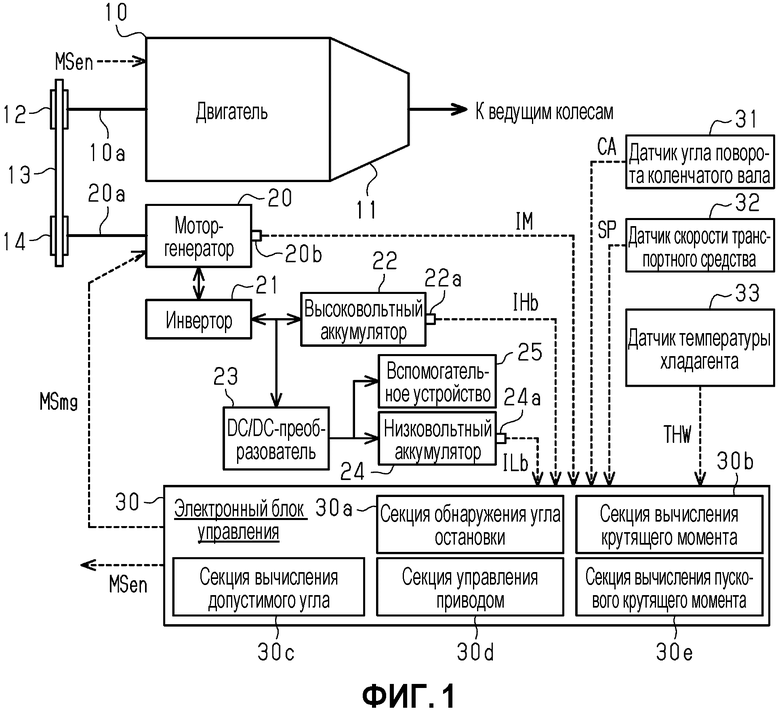
1. Контроллер запуска, применяемый в гибридной системе, включающей в себя двигатель, служащий в качестве источника привода транспортного средства, и мотор-генератор, соединенный с возможностью привода с двигателем, при этом контроллер запуска содержит:
секцию управления приводом, которая автоматически останавливает двигатель и ограничивает объем всасываемого воздуха в двигатель, останавливая впрыск топлива в двигатель, когда удовлетворяется заданное конкретное условие; и
секцию обнаружения угла остановки, которая обнаруживает угол поворота коленчатого вала, когда двигатель автоматически останавливается, в качестве угла остановки,
причем секция управления приводом выполнена таким образом, что, если угол остановки находится за пределами диапазона угла остановки для угла поворота коленчатого вала, в котором возможно перезапускать двигатель, проворачивая коленчатый вал двигателя посредством мотора-генератора, секция управления приводом проворачивает коленчатый вал двигателя посредством мотора-генератора, или перезапускает двигатель, возобновляя впрыск топлива в двигатель, прежде чем период отрицательного давления в цилиндре, который определяется как период времени, в котором давление в цилиндре двигателя является отрицательным давлением относительно атмосферного давления, проходит после начала автоматической остановки двигателя.
2. Контроллер запуска, применяемый в гибридной системе, включающей в себя двигатель, служащий в качестве источника привода транспортного средства, и мотор-генератор, соединенный с возможностью привода с двигателем, при этом контроллер запуска содержит:
секцию управления приводом, которая автоматически останавливает двигатель и ограничивает объем всасываемого воздуха в двигатель, останавливая впрыск топлива в двигатель, когда удовлетворяется заданное конкретное условие; и
секцию вычисления допустимого угла, которая вычисляет, в качестве допустимого диапазона угла поворота коленчатого вала, диапазон угла остановки для угла поворота коленчатого вала в коленчатом вале, в котором возможно перезапускать двигатель, проворачивая коленчатый вал двигателя посредством мотора-генератора,
причем секция управления приводом выполнена таким образом, что, если допустимый диапазон угла поворота коленчатого вала меньше или равен заданному конкретному диапазону, секция управления приводом проворачивает коленчатый вал двигателя посредством мотора-генератора, или перезапускает двигатель, возобновляя впрыск топлива в двигатель, прежде чем период отрицательного давления в цилиндре, который определяется как период времени, в котором давление в цилиндре двигателя является отрицательным давлением относительно атмосферного давления, проходит после начала автоматической остановки двигателя.
3. Контроллер запуска по п. 2, дополнительно содержащий секцию вычисления крутящего момента, которая вычисляет доступный крутящий момент мотора-генератора,
при этом секция вычисления допустимого угла выполнена с возможностью вычисления допустимого диапазона угла поворота коленчатого вала на основе доступного крутящего момента и величины изменения скорости вращения двигателя для двигателя в единицу времени, когда двигатель автоматически останавливается.
4. Контроллер запуска по любому из пп. 1-3, дополнительно содержащий:
секцию вычисления крутящего момента, которая вычисляет доступный крутящий момент мотора-генератора; и
секцию вычисления пускового крутящего момента, которая вычисляет пусковой крутящий момент, требуемый для перезапуска двигателя на основе объема впрыска топлива, когда двигатель находится в заданном состоянии привода,
при этом секция управления приводом выполнена с возможностью запрета автоматической остановки двигателя независимо от конкретного условия, если значение, полученное вычитанием минимального крутящего момента для пускового крутящего момента из доступного крутящего момента, меньше заданного порогового значения.
5. Контроллер запуска по любому из пп. 1-3, в котором секция управления приводом выполнена с возможностью автоматической остановки двигателя, останавливая проворачивание коленчатого вала двигателя посредством мотора-генератора, если конкретный период проходит, который предварительно определяется в качестве периода времени, в котором давление в цилиндре двигателя опять становится отрицательным давлением относительно атмосферного давления, после того как коленчатый вал двигателя проворачивается посредством мотора-генератора, прежде чем проходит период отрицательного давления в цилиндре.
6. Контроллер запуска по любому из пп. 1-3, в котором секция управления приводом выполнена с возможностью возобновления впрыска топлива в двигателе и перезапуска двигателя, если состояние заряда аккумулятора, который подает электрическую мощность к мотору-генератору, ниже или равно некоторому значению, после того как коленчатый вал двигателя проворачивается посредством мотора-генератора, прежде чем период отрицательного давления в цилиндре проходит.
7. Способ управления запуском, применяемый в гибридной системе, включающей в себя двигатель, служащий в качестве источника привода транспортного средства, и мотор-генератор, соединенный с возможностью привода с двигателем, причем способ управления запуском включает этапы, на которых:
автоматически останавливают двигатель и ограничивают объем всасываемого воздуха в двигатель, прекращая впрыск топлива в двигатель, когда удовлетворяется заданное конкретное условие;
обнаруживают угол поворота коленчатого вала, когда двигатель автоматически останавливается, в качестве угла остановки; и,
если угол остановки находится за пределами диапазона угла остановки для угла поворота коленчатого вала, в котором возможно перезапускать двигатель, проворачивая коленчатый вал двигателя посредством мотора-генератора, проворачивают коленчатый вал двигателя посредством мотора-генератора, или перезапускают двигатель, возобновляя впрыск топлива в двигатель, прежде чем период отрицательного давления в цилиндре, который определяется как период времени, в котором давление в цилиндре двигателя является отрицательным давлением относительно атмосферного давления, проходит после начала автоматической остановки двигателя.
8. Способ управления запуском, применяемый в гибридной системе, включающей в себя двигатель, служащий в качестве источника привода транспортного средства, и мотор-генератор, соединенный с возможностью привода с двигателем, причем способ управления запуском включает этапы, на которых:
автоматически останавливают двигатель и ограничивают объем всасываемого воздуха в двигатель, прекращая впрыск топлива в двигатель, когда удовлетворяется заданное конкретное условие;
вычисляют, в качестве допустимого диапазона угла поворота коленчатого вала, диапазон угла остановки для угла поворота коленчатого вала в коленчатом вале, в котором возможно перезапускать двигатель, проворачивая коленчатый вал двигателя посредством мотора-генератора; и,
если допустимый диапазон угла поворота коленчатого вала меньше или равен заданному конкретному диапазону, проворачивают коленчатый вал двигателя посредством мотора-генератора или перезапускают двигатель, возобновляя впрыск топлива в двигатель, прежде чем период отрицательного давления в цилиндре, который определяется как период времени, в котором давление в цилиндре двигателя является отрицательным давлением относительно атмосферного давления, проходит после начала автоматической остановки двигателя.
| JP 2013252725 A, 19.12.2013 | |||
| JP 2004124753 A, 22.04.2004 | |||
| СПОСОБ И СИСТЕМА ДЛЯ ЗАПУСКА ДВИГАТЕЛЯ | 2014 |
|
RU2638118C2 |
| СПОСОБ ЗАПУСКА ДВИГАТЕЛЯ (ВАРИАНТЫ) И СИСТЕМА ЗАПУСКА ДВИГАТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА С ГИБРИДНЫМ ПРИВОДОМ | 2013 |
|
RU2640162C2 |
| СПОСОБ ЗАПУСКА ДВИГАТЕЛЯ (ВАРИАНТЫ) И СИСТЕМА ЗАПУСКА ДВИГАТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА С ГИБРИДНЫМ ПРИВОДОМ | 2013 |
|
RU2606160C2 |

