Настоящее изобретение в целом относится к эллиптическим тренажерам - устройствам для выполнения физических упражнений, у которых траектория движения стопы ноги тренирующегося представляет собой эллипс.
Существует тип тренажеров, приводимых в действие движением ног, имитирующим бег или ходьбу, по, как привило, замкнутой криволинейной траектории. Подобные устройства получили название „эллиптический" тренажер. Многие эллиптические тренажеры такого типа имеют большие размеры, сложную конструкцию, высокую цену и не всегда выверенные эргономические характеристики движения ног.
Задачей изобретения является разработка вариантов осуществления эллиптического тренажера.
Технический результат заключается в том, что предложенные решения содержат упрощенные механические конструкции с эргономически рассчитанными характеристиками траектории движения.
Первый вариант осуществления эллиптического тренажера включает раму, предназначенную для установки с опорой на горизонтальной поверхности. На раме имеются первая ось вращения и вторая ось вращения. Вторая ось вращения расположена впереди первой оси вращения. Первый и второй рычаги тяги, каждый из которых имеет соответственно первую и вторую точки крепления. Каждый рычаг тяги через свою первую точку крепления шарнирно соединен с первой осью вращения на раме. Каждая первая и вторая несущие тяги подстопников имеют заднюю часть, среднюю часть и переднюю часть. Задняя часть каждой несущей тяги снабжена педальной площадкой подстопника для постановки ноги тренирующегося. Средняя часть каждой несущей тяги подстопника шарнирно соединена со второй точкой крепления соответствующего рычага тяги таким образом, что возвратно-поступательное качательное движение рычагов тяги относительно рамы приводит в движение каждую из соответствующих несущих тяг подстопников по горизонтальной составляющей траектории. Кривошипный механизм шарнирно сопряжен с рамой по ее второй оси вращения. Система кривошипов вращается вокруг этой второй оси вращения. Каждая первая и вторая горизонтальные тяги имеет первый конец, соединенный с кронштейном соответствующего рычага тяги, и второй конец, соединенный с кривошипным механизмом таким образом, что вращение кривошипного механизма вокруг второй оси вращения приводит соответственно первый и второй рычаги тяги в качательное движение относительно первой оси вращения, вызывая перемещение опорных тяг подстопников по горизонтальной составляющей общей траектории движения. Первая и вторая вертикальные тяги, каждая из которых имеет первый конец, соединенный с передней частью соответствующей несущей тяги подстопника, и второй конец, соединенный с кривошипным механизмом таким образом, что вращение кривошипного механизма вокруг второй оси вращения приводит несущие тяги подстопников в качательное движение относительно рычагов тяги и педальные площадки к перемещению по вертикальной составляющей общей траектории движения. При вращении кривошипного механизма вокруг второй оси вращения педальная площадка каждой несущей тяги подстопника двигается в целом по эллиптической траектории.
В некоторых вариантах осуществления каждая из вертикальных тяг обычно расположена параллельно соответствующему рычагу тяги. В некоторых конструктивных решениях рабочая длина каждого из рычагов тяги определена как расстояние от первой точки крепления до второй точки крепления, при этом длина каждой вертикальной тяги составляет от 0,8 до 1,2 рабочей длины рычагов тяги.
В ряде реализаций каждая из несущих тяг подстопников имеют опору при движении только на соответствующий рычаг тяги и вертикальную тягу. В некоторых реализациях каждая вертикальная тяга и соответствующий ей рычаг тяги оба расположены вертикально, когда соответствующая несущая тяга подстопника находится на прохождении половины горизонтальной составляющей общей траектории движения.
В некоторых версиях вертикальные тяги в жестком исполнении своим первым концом каждая шарнирно по прямой линии соединена с соответствующей точкой крепления соответствующей несущей тяги подстопника. Своим вторым концом каждая вертикальная тяга шарнирно по прямой сопряжена с плечом кривошипа кривошипного механизма.
В некоторых версиях горизонтальные тяги в жестком исполнении каждая своим первым концом шарнирно по прямой соединена с соответствующей точкой крепления соответствующего рычага тяги. Своим вторым концом каждая [жесткая] горизонтальная тяга шарнирно по прямой сопряжена с плечом кривошипа кривошипного механизма.
В некоторых вариантах осуществления кривошипный механизм имеет первое и второе плечи кривошипа. Второй конец первой горизонтальной тяги и второй конец первой вертикальной тяги каждый шарнирно сочленен с первым плечом кривошипа. Второй конец второй горизонтальной тяги и второй конец второй вертикальной тяги каждый шарнирно сочленен со вторым плечом кривошипа. В некоторых версиях реализации шарнирное соединение между каждой горизонтальной тягой и соответствующим звеном кривошипа аксиально разнесено с шарнирным соединением между соответствующей вертикальной тягой и соответствующим звеном кривошипа. Горизонтальные тяги могут быть наружными относительно вертикальных тяг.
Ряд версий реализации предусматривает шарнирное сочленение между каждой горизонтальной тягой и соответствующим плечом кривошипа и шарнирное сочленение между соответствующей вертикальной тягой и соответствующим ей плечом кривошипа на одной общей оси. Каждая из горизонтальных тяг может выдаваться назад относительно кривошипного механизма для соединения с соответствующим рычагом тяги и находиться в горизонтальном положении, когда соответствующий рычаг тяги находится в своих крайнем переднем и крайнем заднем положениях.
В некоторых реализациях первая ось вращения расположена выше второй оси вращения.
В определенных вариантах конструкции каждый рычаг тяги имеет кронштейн, выступающий вперед относительно всего рычага тяги, для соединения с соответствующими горизонтальными тягами. Сочленение между каждой горизонтальной тягой и соответствующим кронштейном может быть выполнено регулируемым для возможности настройки длины горизонтального шага соответствующей несущей тяги подстопника.
В определенных вариантах конструкции соединение между вертикальной тягой и соответствующей несущей тягой подстопника может быть выполнено регулируемым для возможности настройки высоты вертикальной составляющей движения соответствующей педальной площадки.
В некоторых вариантах конструкции каждая горизонтальная тяга выступает назад относительно кривошипной системы в сторону соответствующего рычага тяги и обычно находится в горизонтальном положении, когда соответствующий рычаг тяги переведен в его крайнее переднее и крайнее заднее положения. Каждая горизонтальная тяга может быть шарнирно соединена с соответствующим рычагом тяги на предусмотренном для этого участке присоединения в третьей точке крепления ниже первой точки крепления. Третьи точки крепления могут быть выполнены с возможностью регулировки для настройки длины горизонтальной составляющей движения соответствующей несущей тяги подстопника.
В некоторых осуществлениях предусмотрена возможность регулирования длины горизонтальной составляющей движения несущих тяг подстопников и высоты вертикальной составляющей движения педальных площадок. Такое регулирование может быть направлено на настройку прилагаемого усилия, для чего горизонтальную и вертикальную составляющие координируют эргономически выверено.
В некоторых реализациях несущие тяги подстопников обычно занимают горизонтальное положение, когда соответствующие педальные площадки находятся на середине вертикальной составляющей траектории движения. Возможен вариант осуществления, при котором тренажер имеет в своем составе первый и второй эластичные соединительные элементы между каждой из несущих тяг подстопников и рамой.
Каждый рычаг тяги далее может быть оснащен рукоятью, продляющей его вверх, начиная от первой точки крепления.
Краткое описание чертежей.
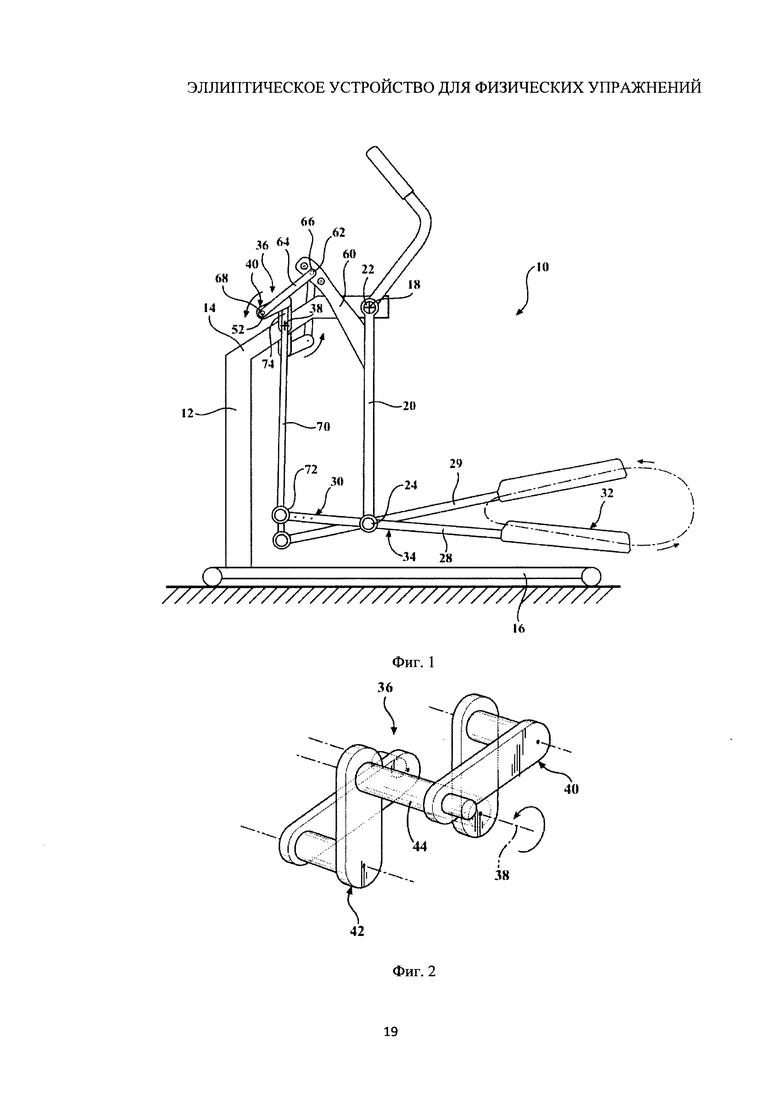
На фиг. 1 показана боковая вертикальная проекция варианта осуществления эллиптического тренажера по настоящему изобретению;
на фиг. 2 дан вид в перспективе кривошипного механизма, применимого в некоторых вариантах осуществления настоящего изобретения;
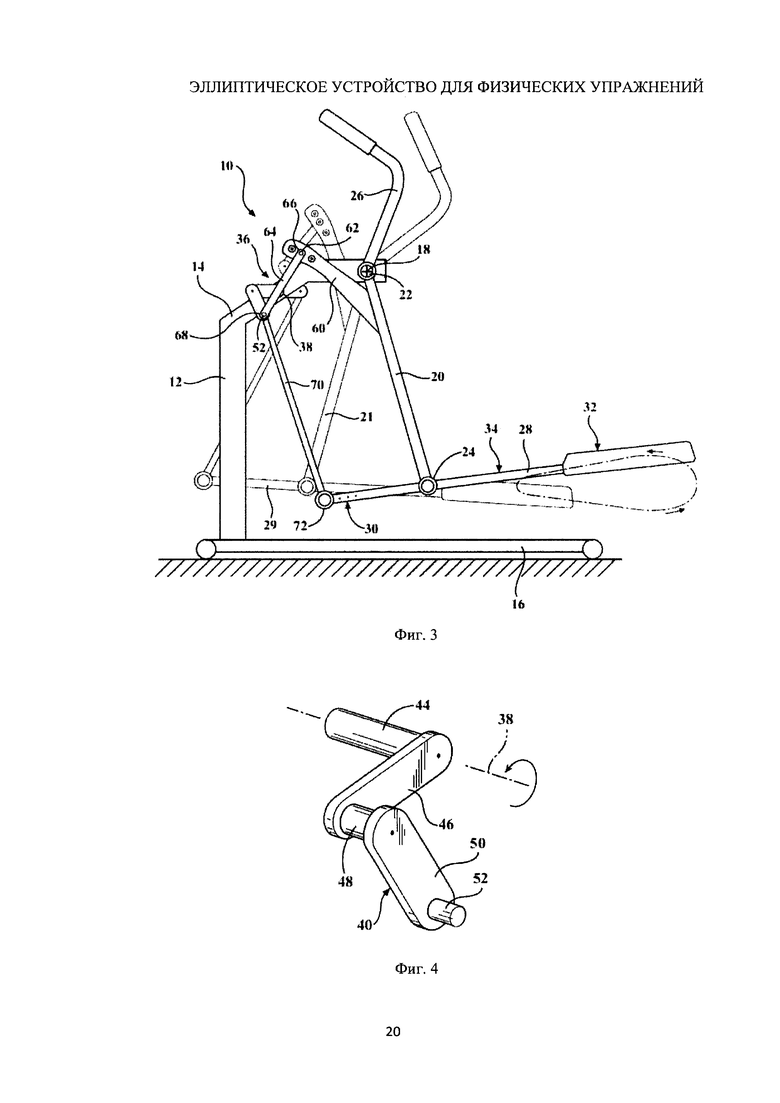
на фиг. 3 показана боковая вертикальная проекция первого варианта осуществления эллиптического тренажера с подвижными элементами, установленными в положении, отличающемся от положения на фиг. 1;
на фиг. 4 дан вид в перспективе одиночного плеча кривошипа кривошипного механизма на фиг. 2;
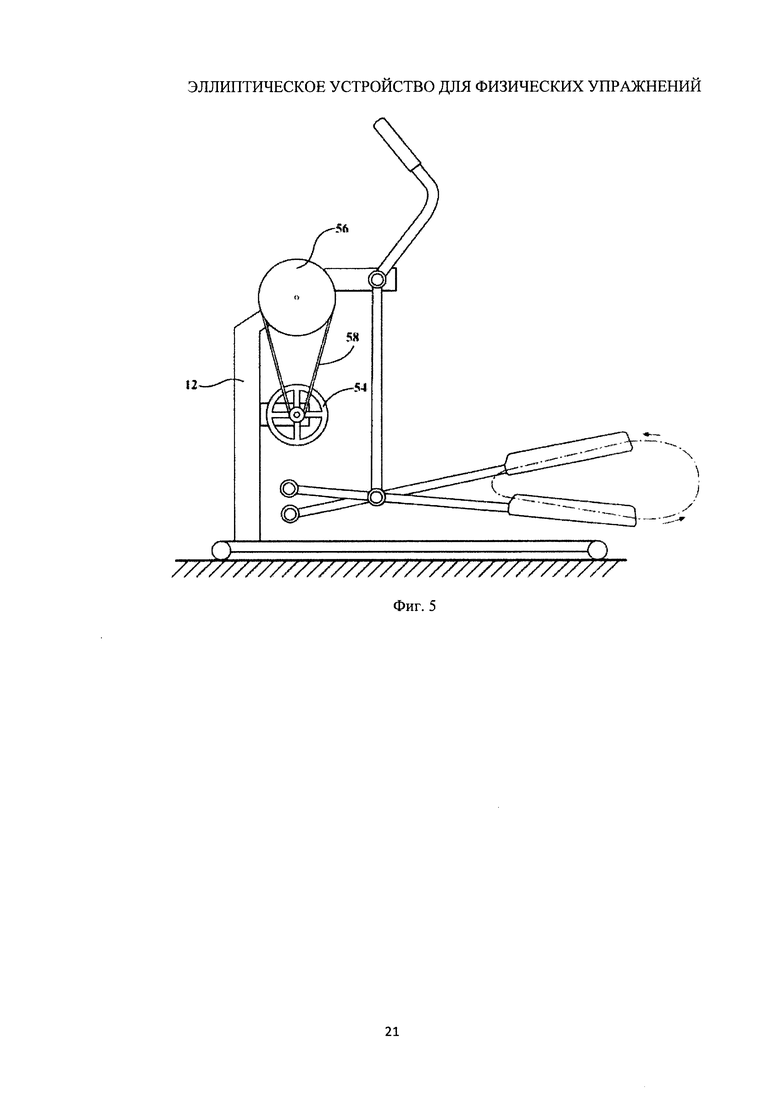
на фиг. 5 показана боковая вертикальная проекция эллиптического тренажера, осуществленного по настоящему изобретению в варианте с маховиковой системой;
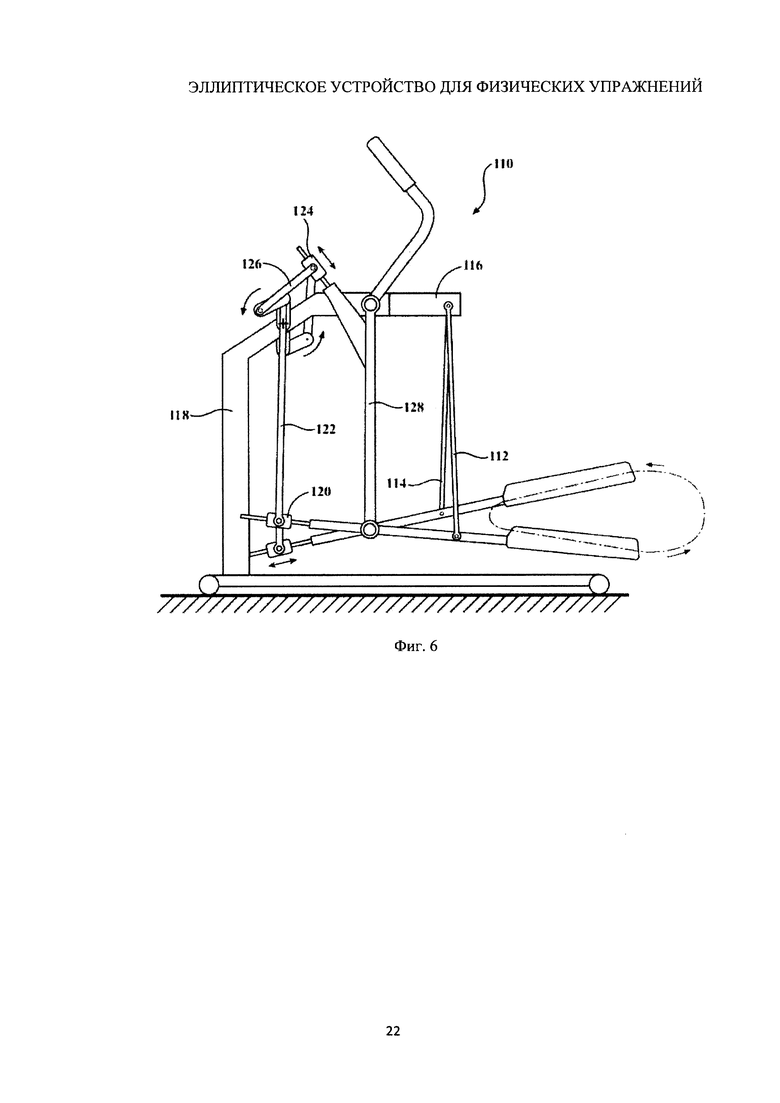
на фиг. 6 показана боковая вертикальная проекция одного из вариантов осуществления эллиптического тренажера по настоящему изобретению; и
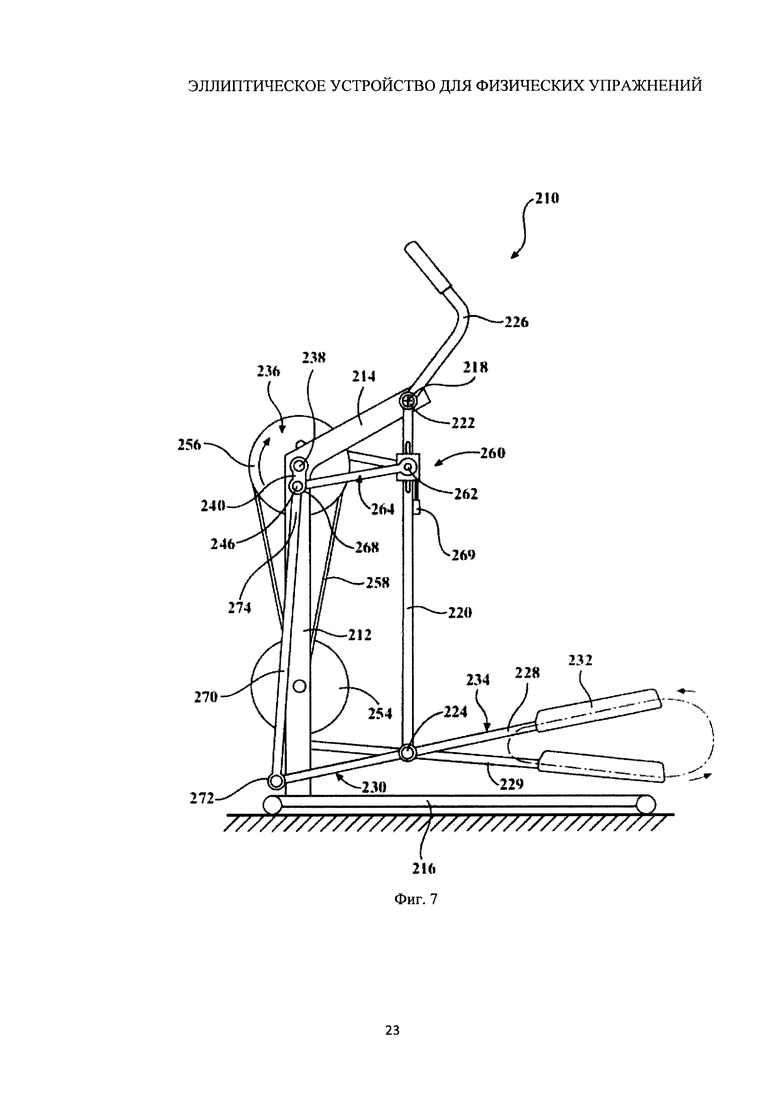
на фиг. 7 показана боковая вертикальная проекция другого варианта осуществления эллиптического тренажера по настоящему изобретению.
Данное изобретение раскрыто посредством рассмотрения ряда конкретных вариантов осуществления, при этом для специалистов в данной области техники очевидно, что представленная концепция подразумевает возможность вариантов конструктивных решений, модификаций и изменений. Специалистам в рассматриваемой сфере понятно, что эллиптический тренажер выполнен из расчета постановки пользователем ступни каждой ноги на отдельную педальную площадку и выполнения движения ног по закрытой эллиптической траектории. Как правило, эллиптический тренажер снабжен левой и правой педальными площадками для опоры, соответственно, левой и правой стоп ног пользователя. Правый и левый элементы тренажера, как правило, в целом одинаковы, хотя конструкция устройства допускает, что две такие педальные площадки могут быть разведены по фазе движения на 180 градусов. Таким образом, когда одна педальная площадка подается назад, вторая педальная площадка перемещается вперед. Предлагаемое здесь изобретение описано со ссылкой только на одну половину набора комплектующих с учетом, что парный ему набор комплектующих имеет идентичную конструкцию. Кроме этого, следует понимать, что термин „эллиптический" здесь не ограничен его математическим значением, а использован в более широком смысле, относящемся к описанию замкнутой траектории движения с криволинейными участками. Горизонтальная составляющая некоторых таких эллиптических траекторий движения имеет большую длину, чем вертикальная составляющая.
Фиг. 1 представляет собой боковую вертикальную проекцию первого варианта конструктивного решения эллиптического тренажера 10 согласно настоящему изобретению. Устройство включает раму 12 для опоры и закрепления других компонентов устройства на горизонтальной поверхности, такой как пол. У данной рамы можно определить наличие верхней части 14 и нижней части 16, при этом нижняя часть выполняет функцию опоры на горизонтальную поверхность, в то время как верхняя часть несет на себе различные компоненты устройства 10. Рама 12, как правило, выполнена из металла и/или композитных материалов, при этом могут быть применены любые материалы. В верхней части 14 рамы 12 расположена первая ось вращения 18. У рамы 12 можно определить наличие передней части, расположенной впереди первой оси вращения 18, в левой части фиг. 1. Верхняя часть 14 рамы в данном конструктивном решении не имеет сколько-нибудь значительного выступа назад за пределы первой оси вращения 18.
Каждый из пары рычагов тяги соединен с рамой с возможностью качания вокруг первой оси вращения 18. Первый рычаг тяги 20 показан в среднем положении своего движения, где он всегда расположен вертикально. При таком положении второй рычаг тяги также всегда расположен вертикально и строго за первым рычагом тяги 20, в силу чего он не виден на фиг. 1. Фиг. 3 представляет собой аналогичный вид сбоку с разницей в положении рычагов тяги. А именно, левый рычаг тяги 20 отведен движением качания в условное заднее положение, в то время как правый рычаг тяги 21 перемещен движением качания в переднее положение, в результате чего видны оба рычага тяги. Для упрощения описания все левые и все правые элементы конструкции могут быть названы соответственно первыми и вторыми компонентами.
На рычаге тяги 20 можно определить наличие первой точки крепления 22 в его вершине и второй точки крепления 24 в его основании. В первой точке крепления 22 рычаг тяги 20 шарнирно соединен с первой осью вращения 18 на раме 12. В иллюстрируемом варианте осуществления рычаг тяги 20 далее включает рукоять 26, отходящую вверх от первой точки крепления 22.
Далее, тренажер 10 включает первую несущую тягу подстопника 28 и вторую несущую тягу подстопника 29. Каждая несущая тяга подстопника 28 и 29 шарнирно соединена с соответствующим первым и вторым рычагом тяги 20 и 21. Несущая тяга подстопника 28 может быть условно разделена на переднюю часть 30, заднюю часть 32 и среднюю часть 34, расположенную между передней и задней частями. Как показано на фиг., средняя часть 34 несущей тяги подстопника 28 шарнирно соединена с основанием рычага тяги 20 в его второй точке крепления 24. Задняя часть 32 несущей тяги подстопника 28 снабжена педальной площадкой подстопника для опоры ноги пользователя. Следует уточнить, что ссылки на переднюю и заднюю части этого элемента конструкции сделаны для указания направления, куда обращен занимающийся на тренажере 10. Пользователь, ставя ноги на подстопники педальных площадок на опорных тягах, обращен лицом к рукоятям 26. На фиг. 1 и 3 „перед" находится слева, „зад" - справа.
Кривошипный механизм 36 шарнирно соединен с рамой 12 с возможностью вращения вокруг второй оси вращения 38 на раме. В иллюстрируемом варианте осуществления вторая ось вращения 38 находится впереди первой оси вращения 18, расположенной на верхней части 14 рамы 12. Это означает, что вторая ось вращения 38 также расположена в передней части рамы. В иллюстрируемом конструктивном решении вторая ось вращения 38 находится немного ниже перед первой осью вращения 18. На фиг. 2 представлен вид в перспективе варианта конструкции кривошипного механизма 36 для применения в некоторых вариантах осуществления настоящего изобретения. Кривошипный механизм 36 имеет первое плечо кривошипа 40 и второе плечо кривошипа 42, оба из которых соединены с центральным элементом 44. Центральный элемент 44 расположен вдоль второй оси вращения 38 и вращается вокруг нее.
На фиг. 4 представлен вид в перспективе части кривошипного механизма, включающей центральный элемент 44 и первое плечо кривошипа 40. Первое плечо кривошипа 40 показано в положении поворота под углом, иным, чем на фиг. 2. На фиг. 4 хорошо видно, что плечо кривошипа 40 имеет внутренний элемент 46, радиально отходящий от центрального элемента 44. Внутренняя цапфа 48 выступает перпендикулярно относительно поверхности внешнего конца внутреннего элемента 46 и образует точку крепления вертикальной тяги, что подробнее будет описано ниже. Один конец плеча кривошипа 40 с внешней поверхностью 50 соединен со вторым концом внутренней цапфы 48 и продолжен от нее в плоскости, параллельной внутреннему элементу 46, но под некоторым углом к нему. На противоположном конце внешней поверхности 50 перпендикулярно к ней выступает внешняя цапфа 52. Внешняя цапфа 52 образует точку крепления горизонтальной тяги, что описано ниже. Цапфы 48 и 52 образуют точки крепления на плече кривошипа 40. В данном конструктивном решении оси вращения, проходящие через точки крепления 48 и 52 разнесены относительно друг друга. Специалистам в данной области понятно, что подобное разнесение осей обеспечивает желаемую траекторию движения.
Как будет рассмотрено дальше, рычаги тяги и опорные тяги подстопников соединены с кривошипным механизмом таким образом, что вращение системы кривошипов приводит в движение педальные площадки подстопников 32 по замкнутой, как правило, эллиптической, траектории. На фиг. 5 показан вид тренажера, иллюстрирующий применение маховика 54, вращательно закрепленного на раме 12. Шкив 56 составляет часть или сопряжен с кривошипным механизмом 36 и соединен ремнем 58 с маховиком 54. Маховик 54 и/или шкив 56 могут быть дополнены нагрузочным элементом, например, устройством электрического или фрикционного сопротивления. Возможны варианты, при которых маховик и/или нагрузочный элемент интегрированы в систему кривошипов 36 или сопряжены тем или иным способом с остальным оборудованием устройства.
Возвращаясь к фиг. 1 и 3, рассмотрим, что каждый из обоих рычагов тяги снабжен кронштейном 60, выступающим вперед от основного рычага тяги 20 непосредственно под первой точкой крепления 22. На кронштейне 60 определена третья точка крепления 62. В третьей точке крепления 62 к кронштейну 60 рычага тяги 20 по прямой линии поворотно присоединен первый конец горизонтальной тяги 64. Второй конец 68 горизонтальной тяги 64 прямолинейно поворотно соединен с внешней цапфой 52 на плече кривошипа 40. Горизонтальная тяга 64 может быть в жестком исполнении. При рассмотрении фиг. 1 и 3 понятно, что при вращении кривошипного механизма относительно второй оси вращения 38 горизонтальная тяга 64 толкает и тянет рычаг тяги 20 таким образом, что он совершает возвратно-поступательные качательные движения относительно первой оси вращения 18. Это приводит опорную тягу подстопника 28 в движение по горизонтальной составляющей траектории. Как показано на чертежах, на кронштейне 60 может быть предусмотрено несколько точек крепления для изменения места шарнирного соединения первого конца 66 горизонтальной тяги 64 с кронштейном 60. Путем изменения точки соединения меняют длину горизонтальной составляющей движения опорной тяги подстопника.
Первая вертикальная тяга 70 имеет первый конец 72, шарнирно соединенный с передней частью 30 несущей тяги подстопника 28. Первая вертикальная тяга 70 имеет второй конец 74, шарнирно соединенный с кривошипным механизмом 36. Это соединение трудно различить на чертежах фиг. из-за формы плеча кривошипа 40. Второй конец 74 шарнирно соединен с внутренней цапфой 48 плеча кривошипа 40. Как показано на фиг. 1, вертикальная тяга 70, как правило, вытянута вертикально и параллельна рычагу тяги 20, когда соответствующая несущая тяга подстопника 28 находится на середине горизонтальной составляющей траектории движения. Как показано на фиг. 3, вертикальная тяга 70 находится под углом к вертикали, когда соответствующую несущую тягу подстопника 28 переводят в заднее положение. При этом вертикальная тяга 70 обычно остается параллельной основному рычагу тяги 20. Также показано, что вертикальная тяга 70 имеет длину, одинаковую с рычагом тяги 20. Можно определить, что протяженность рабочей длины рычага 20 заключена между первой точкой крепления 22 и второй точкой крепления 24. В некоторых вариантах технических решений длина вертикальной тяги 70 равна рабочей длине рычага тяги 20. В некоторых вариантах технических решений длина вертикальной тяги 70 составляет от 0,8 до 1,2 рабочей длины рычага тяги 20. Такое согласование обеспечивает общую параллелограммную конфигурацию рычажного механизма и желаемую траекторию движения.
Кривошипный механизм 36, вращаясь вокруг второй оси вращения 38, приводит вертикальную тягу 70 в движение вверх и вниз, вращательно перемещая соответствующую несущую тягу подстопника 28 относительно второй точки крепления 24 на рычаге тяги 20 и таким образом формируя вертикальный отрезок траектории движения педальной площадки с подстопником 32 на несущей тяге 28. Как показано на чертежах, передняя часть 30 несущей тяги подстопника 28 может иметь несколько точек крепления вертикальной тяги 70. Изменением положения точки крепления может варьироваться высота вертикальной составляющей траектории движения педальной площадки с подстопником 32. Вертикальная тяга 70 может быть в жестком исполнении с прямыми концами, шарнирно соединенными с несущей тягой подстопника 28 и плечом кривошипа 40, соответственно. Технически грамотному специалисту понятно, что при вращении кривошипного механизма 36 вокруг второй оси вращения 38 согласованное положение горизонтальных и вертикальных тяг формирует в целом эллиптическую траекторию движения педальных площадок с подстопниками на несущих тягах.
На фиг. 6 представлен вариант 110 конструктивного решения тренажера. Это конструктивное решение сходно с предшествующими конструктивными решениями, но содержит первый эластичный элемент 112 и второй эластичный элемент 114. Нижний конец каждого эластичного элемента соединен с соответствующей несущей тягой подстопника, при этом верхний конец соединен с задней частью 116 рамы 118 устройства 110. Такие эластичные элементы могут выполнять роль противовеса весу пользователя, оказывающего воздействие на педальные площадки несущих тяга подстопников. Эти эластичные элементы могут быть растяжимы, на допустимую для применяемого эластичного материала длину или выполнены в форме эластичного шнура или жгута с растяжимым компонентом типа пружины. Допустимо применение самых различных растяжимых компонентов. Такие растяжимые компоненты применимы в других вариантах конструктивного решения данного изобретения.
На фиг. 7 представлен альтернативный вариант 210 осуществления тренажера по настоящему изобретению. В данной версии устройство работает аналогично предыдущим вариантам осуществления, однако имеет иные кривошипную и рычажную конструкции. Устройство 210 включает раму 212, имеющую нижнюю часть 216, выполняющую роль опоры на горизонтальную поверхность, и верхнюю часть 214, несущую различные компоненты устройства 210. В верхней части 214 рамы 212 определена первая ось вращения 218. У рамы 212 можно определить наличие передней части, расположенной впереди первой оси вращения 218, в левой части фиг. 6. Верхняя часть 214 рамы в данном конструктивном решении не имеет сколько-нибудь значительного выступа назад за пределы первой оси вращения 218, однако в альтернативном варианте может иметь выступ назад для крепления эластичных элементов, как на фиг. 6.
К раме 212 шарнирно присоединена пара рычагов тяги для качания относительно первой оси вращения 218. Первый рычаг тяги 220 показан в середине его траектории движения, где он обычно занимает вертикальное положение. При таком положении второй рычаг тяги также всегда расположен вертикально и строго за первым рычагом тяги 220, в силу чего он не виден на фиг. 6. Специалистам понятно, что рычаги тяги, качающиеся относительно оси 218 таким образом, что основания рычагов тяги двигаются вперед и назад, как описано в случае первого варианта осуществления.
На рычаге тяги 20 можно определить наличие первой точки крепления 222 в его вершине и второй точки крепления 224 в его основании. Рычаг тяги 220 в первой точке крепления 222 шарнирно соединен с первой осью вращения 218 на раме 212. В иллюстрируемом варианте осуществления рычаг тяги 220 далее включает рукоять 226, отходящую вверх от первой точки крепления 222.
Далее, тренажер 210 включает первую несущую тягу подстопника 228 и вторую несущую тягу подстопника 229. Каждая несущая тяга подстопника 228 и 229 шарнирно соединена с соответствующим первым и вторым рычагом тяги. Несущая тяга подстопника 228 может быть условно разделена на переднюю часть 230, заднюю часть 232 и среднюю часть 234, расположенную между передней и задней частями. Как показано, средняя часть 234 несущей тяги подстопника 228 шарнирно соединена с основанием рычага тяги 220 во второй точке крепления 224. Задняя часть 232 несущей тяги подстопника 228 снабжена педальной площадкой подстопника для опоры ноги пользователя.
Кривошипный механизм 236 шарнирно соединен с рамой 212 с возможностью вращения вокруг второй оси вращения 238 на раме. В иллюстрируемом варианте осуществления вторая ось вращения 238 находится впереди первой оси вращения 218, расположенной на верхней части 214 рамы 212. Это означает, что вторая ось вращения 238 также расположена в передней части рамы. В иллюстрируемом конструктивном решении вторая ось вращения находится немного ниже перед первой осью вращения 218. Кривошипный механизм 236 имеет первое плечо кривошипа 240 и второе плечо кривошипа 242 (расположено диаметрально противоположно плечу кривошипа 240 и на фиг. не показано), оба из которых соединены с центральным валом, проходящим вдоль и вращающимся вокруг второй оси вращения 238.
В отличие от предыдущих конструктивных решений каждое плечо кривошипного механизма 236 может иметь только один участок присоединения тяг. Для плеча 240 участок присоединения обозначен как 246. Ниже более подробно будет описано, что, как вертикальная, так и горизонтальная, тяги шарнирно соединены с этим участком 246 плеча кривошипа 240 таким образом, что они обе вращаются вокруг общей оси, которая может являться цапфой. Это упрощает конструкцию устройства 210.
Рычаги тяги и опорные тяги подстопников соединены с кривошипным механизмом 236 таким образом, что вращение системы кривошипов приводит в движение педальные площадки подстопников 232 по замкнутой, как правило эллиптической, траектории. Маховик 254 может быть вращательно закреплен на раме 212, при этом шкив 256 образует часть кривошипного механизма 236, в котором маховик и шкив соединены ремнем 258. Маховик 254 и/или шкив 256 могут быть дополнены нагрузочным элементом, таким как устройство электрического или фрикционного сопротивления. Предусмотрены варианты, при которых маховик и/или нагрузочный элемент встроены в систему кривошипов 236 или сопряжены каким-либо способом с остальным оборудованием устройства.
Рычаг тяги 220 имеет участок крепления тяги 260, расположенный немного ниже первой точки крепления 222. На участке 260 крепления тяги определена третья точка крепления 262. Первый конец горизонтальной тяги 264 напрямую поворотно соединен с третьей точкой крепления 262 рычага тяги 220. Второй прямой конец 268 горизонтальной тяги 264 поворотно соединен с плечом кривошипа 240 на участке крепления 246. Горизонтальная тяга 264 может быть жесткой. При рассмотрении фигуры 7 понятно, что вращение кривошипного механизма 236 вокруг второй оси вращения 238 приводит в движение горизонтальную тягу 264, которая толкает и тянуть рычаг тяги 220 таким образом, что он совершает возвратно-поступательные движения относительно первой оси вращения 218. Это приводит опорную тягу подстопника 228 в движение по горизонтальной составляющей траектории. В некоторых вариантах реализации положение третьей точки крепления 262 может быть регулируемым по высоте в пределах участка крепления тяги 260. Изменением этого положения меняют длину горизонтальной составляющей движения несущей тяга подстопника. В иллюстрируемом варианте осуществления устройство снабжено механизмом регулировки 269 третьей точки крепления по высоте. Такой регулировочный механизм может представлять собой ручной или электрический привод, например, червячный, который двигает ползун. Положение третьей точки крепления на обоих рычагах тяги предпочтительно регулировать по одной высоте. Также могут быть использованы другие способы регулировки.
Как показано, каждая горизонтальная тяга 264 направлена назад от кривошипного механизма 236 к соответствующему рычагу тяги. Можно сказать, что горизонтальные тяги расположены в основном горизонтально. Специалистам понятно, что когда противоположные рычаги тяги находятся в крайнем переднем и заднем положениях, горизонтальные тяги будут близки к горизонтальному положению, а в середине траектории движения, как показано на фиг. 7, они отклонены от горизонтали.
Первая вертикальная тяга 270 имеет первый конец 272, вращательно соединенный с передней частью 230 первой несущей тяги подстопника 228. Вертикальная тяга 270 имеет второй конец 274, вращательно соединенный с кривошипным механизмом 236 на участке присоединения 246. Как показано на фиг. 7, вертикальная тяга 270 проходит в целом вертикально и в целом параллельно основному рычагу тяги 220, когда соответствующая несущая тяга подстопника 228 находится в середине горизонтальной составляющей своей траектории. Специалистам понятно, что вертикальная тяга 270 расположена под углом к вертикали, когда соответствующая несущая тяга подстопника 228 проходить вблизи ее заднего положения. Однако в целом вертикальная тяга 270 остается параллельной основному рычагу тяги 220. Также видно, что вертикальная тяга 270 имеет длину, соразмерную длине рычага тяги 220. В частности, можно сказать, что рычаг тяги 220 имеет рабочую длину, определяемую между первой точкой крепления 222 и второй точкой крепления 224. В некоторых вариантах конструкции длина вертикальной тяги 270 равна рабочей длине рычага тяги 220. Согласно некоторым конструктивным решениям длина тяги 270 составляет в пределах от 0,8 до 1,2 рабочей длины рычага тяги 220. Такое согласование обеспечивает общую параллелограммную конфиг.цию рычажного механизма и желаемую траекторию движения.
Кривошипный механизм 236, вращаясь вокруг второй оси вращения 238, приводит вертикальную тягу 270 в движение вверх и вниз, вращательно перемещая соответствующую несущую тягу подстопника 228 относительно второй точки крепления 224 на рычаге тяги 220 и таким образом формируя вертикальный отрезок траектории движения педальной площадки с подстопником 232 на несущей тяге 228. Передняя часть 230 несущей тяги подстопника 228 может иметь несколько точек крепления вертикальной тяги 270, и может быть снабжена регулировочным механизмом, подобным механизму 269. Изменением положения точки крепления может варьироваться высота вертикальной составляющей траектории движения педальной площадки с подстопником 232. Вертикальная тяга 270 может быть в жестком исполнении с прямыми концами, шарнирно соединенными с несущей тягой подстопника 228 и плечом кривошипа 240, соответственно. Технически грамотному специалисту понятно, что при вращении кривошипного механизма 236 вокруг второй оси вращения 238 согласованное положение горизонтальных и вертикальных тяг формирует в целом эллиптическую траекторию движения педальных площадок с подстопниками на несущих тягах.
Для специалистов с техническим опытом очевидно, что в вариантах осуществления на фиг. 1-7 несущие тяги подстопников имеют полностью подвесное крепление. В случаях фиг. 1-4 и 7 несущие тяги подстопников имеют опору только на рычаги тяги и вертикальные тяги. Говоря иначе, вся опора размещена впереди педальных площадок подстопников, и никакая опора не предусмотрена позади крепления к рычагу тяги. На фиг. 6 подвеска дополнительно обеспечивается эластичным элементом, закрепленным позади рычага тяги. Многие из существующих эллиптических тренажеров снабжены беговой дорожкой или педальными площадками или опорами подстопников, удерживаемыми снизу. Иллюстрируемые варианты осуществления не имеют такой несущей дорожки или опоры снизу.
Фиг. 6 иллюстрирует произвольный подход к реализации с возможностью регулирования горизонтальной и/или вертикальной амплитуды движения устройства. Регулятор 120 размещен на передней части несущей тяги подстопника с закрепляемой здесь же вертикальной тягой 122. Регулятор 120 перемещают вперед-назад, настраивая амплитуду движения по вертикали. Другой регулятор 124 размещен на горизонтальной тяге 126 в месте соединения с рычагом тяги 128. Регулятор 124 перемещают внутрь и наружу, настраивая амплитуду движения по горизонтали. Регуляторы 120 и 124 могут быть выполнены в разнообразных видах, например, винтовыми, с механическим или гидравлическим приводом. Дальнейшие варианты остаются на усмотрение специалистов в данной области. Регуляторы 120 и 124 могут представлять собой элементы ручной регулировки любой разновидности. В некоторых версиях реализации настоящего изобретения регуляторы выполнены с возможностью скоординированной настройки вертикальной и горизонтальной составляющих траектории. Применимы также другие подходы к регулированию горизонтальной и/или вертикальной амплитуд, например, корректировка положения крепления тяг к кривошипному механизму.
В то время как показанные на чертежах горизонтальная и вертикальная тяги прямолинейно вращательно подсоединены к плечам кривошипа и к соответствующим рычагам тяги и несущим тягам подстопников, альтернативные варианты осуществления настоящего изобретения предусматривают возможность непрямолинейного присоединения, например, с помощью угловых рычагов или других непрямых соединительных элементов с одного или обоих концов. В то же время прямолинейные шарнирные соединения в некоторых вариантах конструкции предпочтительны.
Выше описано раскрытие ряда возможных частных случаев осуществления настоящего изобретения. Для специалистов в данной области техники очевидна возможность других вариантов осуществления, модификации и изменений раскрытой здесь технической сути. Вышеизложенное не является ограничением для практической реализации данного изобретения. Так, каждый из раскрытых здесь признаков любого из вариантов реализации взаимосочетаем и применим с каждым из признаков любого другого варианта реализации. Объем изобретения, включая все аналоги, определен его формулой, представленной ниже.
Настоящее изобретение в целом относится к эллиптическим тренажерам - устройствам для выполнения физических упражнений, у которых траектория движения стопы ноги тренирующегося представляет собой эллипс. Эллиптический тренажер, имеющий рычаги тяги, шарнирно соединенные с рамой, и несущие тяги педальных подстопников, шарнирно прикрепленные к рычагам тяги. Горизонтальные тяги соединяют рычаги тяги с кривошипным механизмом, а вертикальные тяги соединяют с кривошипным механизмом несущие тяги подстопников таким образом, что вращение кривошипного механизма приводит в движение педальные площадки с подстопниками по общей в целом эллиптической траектории. 24 з.п. ф-лы, 7 ил.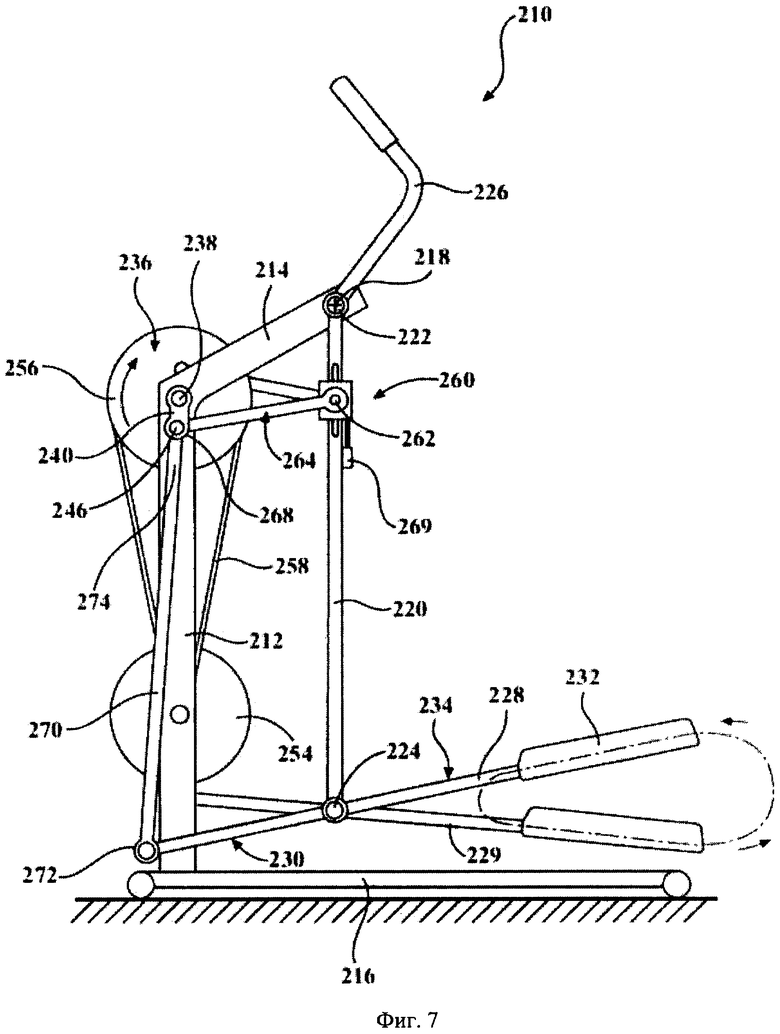
1. Эллиптический тренажер, содержащий раму для установки с опорой на горизонтальную поверхность, имеющую первую ось вращения и вторую ось вращения, из которых вторая ось вращения расположена впереди первой оси вращения; первый и второй рычаги тяги, имеющие первую и вторую точки крепления каждый, шарнирно соединенные через первую точку крепления с первой осью вращения рамы каждый; первую и вторую несущие тяги подстопников, имеющие заднюю часть, среднюю часть и переднюю часть каждая, при этом задняя часть каждой несущей тяги несет педальную площадку подстопника для постановки ноги пользователя, средняя часть каждой несущей тяги подстопника шарнирно соединена со второй точкой крепления соответствующего рычага тяги таким образом, что возвратно-поступательное качательное движение рычагов тяги относительно рамы приводит в движение каждую из соответствующих несущих тяг подстопников по горизонтальной составляющей траектории; кривошипный механизм, шарнирно сопряженный с рамой по ее второй оси вращения с возможностью вращения вокруг этой оси; первую и вторую горизонтальные тяги, каждая из которых имеет первый конец, соединенный с соответствующим рычагом тяги, и второй конец, соединенный с кривошипным механизмом таким образом, что вращение кривошипного механизма вокруг второй оси вращения приводит соответственно первый и второй рычаги тяги в качательное движение относительно первой оси вращения, вызывая перемещение опорных тяг подстопников по горизонтальной составляющей общей траектории движения; первую и вторую вертикальные тяги, каждая из которых имеет первый конец, соединенный с передней частью соответствующей несущей тяги подстопника, и второй конец, соединенный с кривошипным механизмом таким образом, что вращение кривошипного механизма вокруг второй оси вращения приводит несущие тяги подстопников в качательное движение относительно рычагов тяги и педальные площадки к перемещению по вертикальной составляющей общей траектории движения, педальная площадка каждой несущей тяги подстопника выполнена с возможностью движения по эллиптической траектории при вращении кривошипного механизма вокруг второй оси вращения.
2. Тренажер по п. 1, в котором каждая из вертикальных тяг расположена параллельно соответствующему рычагу тяги.
3. Тренажер по п. 2, в котором рабочая длина каждого из рычагов тяги определена как расстояние от первой точки крепления до второй точки крепления; и длина каждой вертикальной тяги составляет от 0,8 до 1,2 рабочей длины рычагов тяги.
4. Тренажер по п. 1, в котором несущие тяги подстопников имеют опору при движении только на соответствующий рычаг тяги и вертикальную тягу.
5. Тренажер по п. 1, в котором каждая вертикальная тяга и соответствующий ей рычаг тяги расположены вертикально, когда соответствующая несущая тяга подстопника находится на середине горизонтальной составляющей общей траектории движения.
6. Тренажер по п. 1, в котором вертикальные тяги имеют жесткое исполнение; первый конец каждой вертикальной тяги шарнирно прямолинейно соединен с соответствующим концом соответствующей несущей тяги подстопника; и второй конец каждой вертикальной тяги шарнирно прямолинейно сопряжен с плечом кривошипа кривошипного механизма.
7. Тренажер по п. 1, в котором горизонтальные тяги имеют жесткое исполнение; первый конец каждой горизонтальной тяги шарнирно прямолинейно соединен с соответствующим концом соответствующего рычага тяги; и второй конец каждой горизонтальной тяги шарнирно прямолинейно сопряжен с плечом кривошипа кривошипного механизма.
8. Тренажер по п. 1, в котором кривошипный механизм имеет первое и второе плечи кривошипа; второй конец первой горизонтальной тяги и второй конец первой вертикальной тяги каждый шарнирно сочленен с первым плечом кривошипа; и второй конец второй горизонтальной тяги и второй конец второй вертикальной тяги каждый шарнирно сочленен со вторым плечом кривошипа.
9. Тренажер по п. 8, в котором шарнирное соединение между каждой горизонтальной тягой и соответствующим звеном кривошипа аксиально разнесено с шарнирным соединением между соответствующей вертикальной тягой и соответствующим звеном кривошипа.
10. Тренажер по п. 9, в котором горизонтальные тяги могут находиться снаружи относительно вертикальных тяг.
11. Тренажер по п. 8, в котором шарнирное сочленение между каждой горизонтальной тягой и соответствующим плечом кривошипа и шарнирное сочленение между соответствующей вертикальной тягой и соответствующим ей плечом кривошипа размещены на одной общей оси.
12. Тренажер по п. 11, в котором каждая из горизонтальных тяг выступает назад относительно кривошипного механизма для соединения с соответствующим рычагом тяги и находится в горизонтальном положении, когда соответствующий рычаг тяги находится в своих крайнем переднем и крайнем заднем положениях.
13. Тренажер по п. 1, в котором первая ось вращения расположена выше второй оси вращения.
14. Тренажер по п. 1, в котором каждый рычаг тяги имеет кронштейн, выступающий вперед относительно всего рычага тяги, для соединения с соответствующими горизонтальными тягами.
15. Тренажер по п. 14, в котором сочленение между каждой горизонтальной тягой и соответствующим кронштейном выполнено регулируемым для настройки длины горизонтального шага соответствующей несущей тяги подстопника.
16. Тренажер по п. 1, в котором соединение между вертикальной тягой и соответствующей несущей тягой подстопника может быть выполнено регулируемым для возможности настройки высоты вертикальной составляющей движения соответствующей педальной площадки.
17. Тренажер по п. 1, в котором каждая горизонтальная тяга выступает назад относительно кривошипной системы в сторону соответствующего рычага тяги и обычно находится в горизонтальном положении, когда соответствующие рычаги тяги переведены в их крайнее переднее и крайнее заднее положения.
18. Тренажер по п. 17, в котором каждая горизонтальная тяга шарнирно соединена с соответствующим рычагом тяги на предусмотренном для этого участке присоединения в третьей точке крепления ниже первой точки крепления.
19. Тренажер по п. 18, в котором третьи точки крепления выполнены с возможностью регулировки для настройки длины горизонтальной составляющей движения соответствующей несущей тяги подстопника.
20. Тренажер по п. 1, который выполнен с возможностью регулирования длины горизонтальной составляющей движения несущих тяг подстопников и высоты вертикальной составляющей движения педальных площадок.
21. Тренажер по п. 20, который выполнен с возможностью скоординированного регулирования горизонтальной и вертикальной составляющих траектории движения с помощью электропривода.
22. Тренажер по п. 1, в котором несущие тяги подстопников расположены горизонтально, когда каждая соответствующая педальная площадка находится на середине вертикальной составляющей траектории движения.
23. Тренажер по п. 1, который дополнительно включает первый и второй эластичные элементы, каждый из которых натянут между соответствующими несущими тягами подстопников и рамой.
24. Тренажер по п. 1, в котором каждый рычаг снабжен рукоятью, продляющей его вверх от первой точки крепления.
25. Тренажер по п. 1, в котором кривошипный механизм включает первое и второе плечи кривошипа, каждое из которых имеет две точки крепления.
| US 7651445 B1, 16.01.2010 | |||
| Способ интенсификации экстракционных процессов | 1957 |
|
SU109669A1 |
| US 2006172865 A1, 03.08.2006 | |||
| US 7214168 B2, 08.05.2007 | |||
| US 5186697 A, 16.02.1993 | |||
| ПРОПРИОЦЕПТИВНОЕ/КИНЕСТЕТИЧЕСКОЕ УСТРОЙСТВО И СПОСОБ | 2003 |
|
RU2343946C2 |

