Область техники
Настоящее изобретение относится к области рулевого управления безрельсовым транспортным средством, и более конкретно, к механизму и способу идентичного рулевого управления трапециевидным качающимся рычагом с радиальной тягой, а также многоколесному транспортному средству.
Уровень техники
В настоящее время, в технологии рулевого управления многоколесными транспортными средствами в Китае, в управлении передними колесами преобладает компенсация трапециевидной передачи, однако трапециевидное рулевое управление является технологией приблизительного рулевого управления, в математическом анализе трапециевидного рулевого управления, кривая влияния рулевого управления перекрывается только идеальным соотношением вблизи углов 3 и 35 градусов, и когда угол больше 43 градусов, увеличивается дисперсия, в результате чего происходит боковой увод шин транспортного средства при повороте (особенно во время парковки), даже с вибрацией руля и визгом.
С целью преодоления вышеуказанных недостатков, заявитель настоящей заявки подал заявку на патент 201822081420.3, в которой представлено четыре варианта осуществления изобретения, однако, так как четыре варианта имеют сложную конструкцию, необходимо дополнительно упростить конструкцию и расширить область применения в транспортных средствах.
Следовательно, актуальной задачей, требующей решения специалистами в данной области техники, является обеспечение транспортного средства, отличающегося простой конструкцией, и преодоление бокового увода колес и вибрации рулевого колеса вследствие ограничения трапециевидного рулевого управления при повороте (при парковке) транспортного средства.
Краткое описание изобретения
Для преодоления недостатков, касающихся бокового увода колес и отклонения рулевого колеса, вызванных ограничением трапециевидного рулевого управления при повороте (при парковке) транспортного средства, предложен механизм идентичного рулевого управления трапециевидным качающимся рычагом с радиальной тягой.
Более определенно технические решения настоящего изобретения описаны ниже.
Механизм идентичного рулевого управления трапециевидным качающимся рычагом с радиальной тягой, установленный в середине переднего конца кузова транспортного средства и не обладающий функцией рулевого управления задними колесами транспортного средства, включающий:
Радиальную тягу, один конец которой соединен с нижней частью рулевой колонки, при этом угол поворота рулевого колеса равен α, длина радиальной тяги (1) равна R; вращение рулевого колеса обеспечивает перемещение радиальной тяги для образования синуса sinα и косинуса cosα, вместе с тем, синус sinα и косинус cosα рассчитаны таким образом, чтобы соответствовать вращению рулевого колеса.
Трапециевидный качающийся рычаг, один конец которого перпендикулярно соединен с другим концом радиальной тяги, при этом в фиксированной точке трапециевидного качающегося рычага и радиальной тяги сформирован зафиксированный вал маятника; длина трапециевидного качающегося рычага составляет R*M/Hi, и трапециевидный качающийся рычаг выполнен с возможностью отклонения вместе с углом поворота α рулевого колеса, и одновременно создает эффект продольной компенсации косинуса (R*N/Hi)*sinα и продольное перемещение R*cosα±(R*M/HI)*sinα.
Синусоидальный шатун, выполненный в виде горизонтального стержня, расположенного в горизонтальном направлении, и имеющий две втулки, при этом зафиксированный вал маятника выполнен с возможностью вставки в первую втулку, и синусоидальный шатун вертикально расположен между радиальной тягой и трапециевидным качающимся рычагом, чтобы следовать за зафиксированным валом маятника.
Ведомую радиальную тягу, при этом один конец ведомой радиальной тяги выполнен с возможностью шарнирного крепления во второй втулке, тогда как другой конец выполнен с возможностью шарнирного крепления к раме, и ведомая радиальная тяга параллельна радиальной тяге и имеет такую же длину, и в сочетании с синусоидальным шатуном и радиальной тягой, формируется параллельный четырехзвенный шарнирный механизм.
Передаточный рычаг двумерного комплексного управления, при этом на передаточном рычаге двумерного комплексного управления расположена крестообразная прорезь, и поперечная прорезь крестообразной прорези параллельна полуосям на обеих сторонах, в то же время вертикальная прорезь крестообразной прорези параллельна продольному направлению кузова транспортного средства; и на одной стороне поперечной прорези размещен соединительный рычаг.
Качающийся рычаг векторного управления, на качающемся рычаге векторного управления расположена прорезь скольжения, и начальное положение направления установки прорези скольжения параллельно направлению расположения радиальной тяги.
Множество ползунов, первый ползун выполнен с возможностью крепления на одном конце синусоидального шатуна и скольжения в вертикальной прорези для формирования горизонтального синусоидального перемещения R*sinα передаточного рычага двумерного комплексного управления; второй ползун выполнен с возможностью шарнирного крепления на другом конце трапециевидного качающегося рычага и скольжения в поперечной прорези для создания продольного перемещения передаточного рычага двумерного комплексного управления, постоянно равного R*cosα±(R*M/Hi)*sinα, таким образом управляя передаточным рычагом двумерного комплексного управления для перемещения вверх и вниз, влево и вправо по вертикали и горизонтали; третий ползун выполнен с возможностью шарнирного соединения с одним концом соединительного рычага для образования критической контрольной точки (Gi) и скольжения в прорези скольжения.
К прорези скольжения присоединен вспомогательный рулевой вал или сплошной рулевой вал, и третий ползун выполнен с возможностью приведения в движение прорези скольжения для поворота вокруг вспомогательного рулевого вала, заставляя вспомогательный рулевой вал создавать угол поворота βi, кроме того, сплошной рулевой вал выполнен с возможностью соединения с синхронным валом-шестерней, или параллельным шатуном, или двойным шатуном кривошипного механизма; или сплошной рулевой вал непосредственно соединен и управляется качающимся рычагом векторного управления, и третий ползун выполнен с возможностью приведения в движение прорези скольжения для поворота вокруг сплошного рулевого вала для образования угла поворота βi, кроме того, сплошной рулевой вал выполнен с возможностью соединения в осевом или вертикальном направлениях с полуосью ступицы для достижения R*cosβi=R*cosα±R*M/H*sinα.
В сравнении с известным уровнем техники, раскрытое изобретение обеспечивает механизм идентичного рулевого управления трапециевидным качающимся рычагом с радиальной тягой, радиальная тяга и трапециевидный качающийся рычаг интегрированы в один корпус и расположены перпендикулярно друг другу, упрощена конструкция механизма рулевого управления, и для реализации постоянного универсального рулевого управления на основе существующего механизма трапециевидного рулевого управления транспортного средства может быть добавлен передаточный рычаг двумерного комплексного управления, что снижает стоимость изготовления, удобно для установки и безопасно и надежно при использовании. Все нормали ступиц колес и полуоси ступиц идентично указывают на одинаковый центр рулевого управления мгновенного перемещения, что исключает занос в сторону. Согласно технической схеме изобретения, до тех пор, пока позволяет подвеска, угол поворота рулевого вала может поворачиваться по полному кругу, и в данном процессе предотвращается боковой увод шины, в случае нарушения известного предела трапециевидного рулевого управления в 40 градусов, смещение компенсации косинуса приводит к продольному перемещению передаточного рычага двумерного комплексного управления, чтобы стать главной вспомогательной силой рулевого управления, и угол поворота последовательно входит во второй квадрант через прямое угловое положение, или даже продолжает поворот по полному кругу до четырех квадрантов, что является очевидным отличием между настоящим изобретением и известным трапециевидным рулевым управлением, и объектом применения рулевого управления с большим углом является, главным образом, боковая парковка на небольшой скорости обычного транспортного средства или погрузчика с вилочным захватом.
В предпочтительном варианте осуществления изобретения, длина радиальной тяги R определяется пространством для установки в кузове транспортного средства; пространство для установки отличается для различных типов транспортных средств, и расчет и выбор осуществляется в соответствии с типами транспортных средств, например, 75 мм, 105 мм или 125 мм.
В предпочтительном варианте осуществления изобретения, каждый из первого ползуна и второго ползуна имеет длину, более чем в два раза превышающую ширину поперечной прорези крестообразной прорези в случае, если первый ползун или второй ползун выскользнет из крестообразной прорези.
В предпочтительном варианте осуществления изобретения, механизм управления дополнительно включает корпус, радиальная тяга, ведомая радиальная тяга, трапециевидный качающийся рычаг, синусоидальный шатун, передаточный рычаг двумерного комплексного управления, качающийся рычаг векторного управления и ползуны, все закреплены в корпусе, и нижняя часть рулевой колонки выполнена с возможностью вставки в верхнюю часть корпуса и соединена с радиальной тягой, и вспомогательный рулевой вал выполнен с возможностью выступать из корпуса для соединения синхронного вала-шестерни или параллельного шатуна, или двойного шатуна кривошипного механизма со сплошным рулевым валом. Согласно изобретению, корпус блокирует пыль и загрязнения с внешней стороны, кроме того, в соответствующем положении вытянутого конца рулевого вала и корпуса расположен уплотнительный элемент, и для снижения рабочего сопротивления и охлаждения деталей внутри корпуса можно ввести смазочное масло в корпус.
В предпочтительном варианте осуществления изобретения, трапециевидный качающийся рычаг, передаточный рычаг двумерного комплексного управления, качающийся рычаг векторного управления и ползуны выполнены в виде двух комплектов; при этом первый комплект выполнен активным, второй комплект выполнен ведомым, и трапециевидный качающийся рычаг в первом комплекте выполнен с возможностью крепления в первой втулке и параллельно радиальной тяге; вместе с тем, трапециевидный качающийся рычаг во втором комплекте выполнен с возможностью крепления во второй втулке и параллельным трапециевидному качающемуся рычагу в первом комплекте; на другой стороне поперечной прорези передаточного рычага двумерного комплексного управления во втором комплекте выполнен соединительный рычаг, и соединительный рычаг во втором комплекте выполнен с возможностью приведения в движение качающегося рычага векторного управления во втором комплекте посредством третьего ползуна во втором комплекте, и установочные положения первого ползуна и второго ползуна во втором комплекте аналогичны установочным положениям и соединительным взаимосвязям в первом комплекте, соответственно; эффект варианта осуществления изобретения заключается в том, что левое и правое передние колеса могут получить компенсацию косинуса, и поскольку при функционировании в режиме «ведущий-ведомый» используется один синусоидальный шатун, может быть реализовано рулевое управление с острым углом.
В предпочтительном варианте осуществления изобретения, кривошипный механизм с двойным шатуном выполнен с возможностью присоединения в положении оси шарнирного соединения радиальной тяги и ведомой радиальной тяги, и кривошипный механизм с двойным шатуном сформирован путем добавления кривошипа фиксированной длины в аналогичном вертикальном относительном расположении, что радиальная тяга и ведомая радиальная тяга, и соединен с помощью шатуна кривошипа, при этом радиус кривошипа фиксированной длины является постоянным значением от R/2 до 4R/5; преимущество заключается в том, что угол поворота может быть увеличен до тупого угла на основе вышеуказанного варианта осуществления двусторонней компенсации для рулевого управления с острым углом.
В предпочтительном варианте осуществления изобретения, трапециевидный качающийся рычаг, передаточный рычаг двумерного комплексного управления, качающийся рычаг векторного управления и ползуны выполнены в виде двух комплектов; при этом передаточный рычаг двумерного комплексного управления в первом комплекте расположен на верхнем уровне рядом с рамой, в то время, как передаточный рычаг двумерного комплексного управления во втором комплекте установлен на более низком уровне относительно передаточного рычага двумерного комплексного управления в первом комплекте для обеспечения начального положения α = β = 0; кривошипный подшипник конце трапециевидных качающихся рычагов в первой группе выполнена с возможностью прохождения через нижнюю часть второго ползуна, присоединения к трапециевидному качающемуся рычагу второго комплекта и, следовательно, соединения для приведения в движение второго ползуна во втором комплекте; и первый ползун второго комплекта закреплен на другом конце синусоидального шатуна и выполнен с возможностью перемещения вместе с радиальной тягой и синусоидальным шатуном; длина трапециевидного качающегося рычага второго комплекта в два раза превышает длину трапециевидного качающегося рычага первой группы, и трапециевидные качающиеся рычаги двух комплектов соответственно соединены cо вторыми ползунами; при этом ведомая радиальная тяга выполнена с возможностью замены плавающим вертикальным каналом, расположенным на раме, и плавающий вертикальный канал выполнен с возможностью соединения и управления синусоидальным шатуном для удерживания параллельно оси, при этом плавающий вертикальный канал включает горизонтальный плавающий канал, неподвижно соединенный с рамой и параллельный оси, и вертикальный плавающий канал, расположенный перпендикулярно относительно горизонтального плавающего канала; в горизонтальном плавающем канале выполнен поперечный четвертый ползун, и горизонтальный плавающий канал соединен с вертикальным плавающим каналом посредством поперечного четвертого ползуна; продольный пятый ползун расположен с возможностью скольжения в вертикальном плавающем канале, продольный пятый ползун соединен с первым ползуном; или поперечный четвертый ползун вертикально неподвижно соединен с продольным пятым ползуном, который соединен с возможностью скольжения с вертикальным плавающим каналом, и поперечный четвертый ползун соединен с возможностью скольжения с горизонтальным плавающим каналом, и вертикальный плавающий канал неподвижно соединен с синусоидальным шатуном; поперечный четвертый ползун проходит в близком расположении друг к другу с обеих сторон, и верхний конец поперечного четвертого ползуна проходит ниже вертикальной прорези передаточного рычага двумерного комплексного управления первого комплекта, и нижний конец поперечного четвертого ползуна проходит выше вертикальной прорези передаточного рычага двумерного комплексного управления второго комплекта и параллельно противоположной стороне квадратной рамы вместе с синусоидальным шатуном; плавающий вертикальный канал выполнен с возможностью управления синусоидальным шатуном для перемещения относительно плавающего вертикального канала в горизонтальном и вертикальном направлениях. Данный вариант осуществления двусторонней компенсации косинуса левого и правого передних колес применим для внедорожников с шасси высокой проходимости за счет многоуровневого размещения механизмов на обеих сторонах, а также удобен для обеспечения герметичности в корпусе.
В предпочтительном варианте осуществления изобретения, эффект рулевого управления рулевого механизма рассчитан на управление направлением вектора левого переднего, левого заднего, правого переднего и правого заднего колес и прорезей скольжения, которые регулируют длину рычага векторного управления, при этом прорези скольжения, которые регулируют длину рычага векторного управления, относятся к прорези скольжения рычага векторного управления, вертикальной прорези и вертикальному плавающему каналу, и на одной стороне прорезей скольжения, которые регулируют длину рычага векторного управления, неподвижно установлен потенциометр, и потенциометр представляет собой потенциометр постоянного тока сопротивления скольжению или бесконтактный потенциометр переменного тока с датчиком Холла, и клемма управления рельсовой направляющей потенциометра сопротивления скольжению или конец натянутого шнура подвижной катушки бесконтактного потенциометра с датчиком Холла соединен с блоками скольжения, которые смещены вдоль прорезей скольжения. Напряжение движущего целевого значения, соответствующее начальному нулевому положению каждого потенциометра, представляет собой стандартный радиус R; для каждой ведущей полуоси, реализующей векторное звено дифференциала с электронным управлением, необходимо установить потенциометр в соответствующем положении, чтобы соответственно получить напряжение целевого значения, необходимое для рулевого механизма векторного звена дифференциала с электрическим управлением.
В транспортном средстве без механизма компенсации трапециевидного качающегося рычага с тягой, вектор левого переднего колеса равен длине R соответствующей радиальной тяги, при этом потенциометр имеет фиксированную длину и может быть заменен стандартным резистором в различных местах, и теоретически, вектор левого заднего колеса представляет собой перемещение R* cosα в вертикальном плавающем канале, если требуется дифференциальная передача левых задних колес, то необходимо установить плавающий канал, пятый ползун соединен с вертикальным плавающим каналом, или первый ползун заключен в вертикальный плавающий канал, на одной стороне вертикального плавающего канала размещен потенциометр, и конец управления потенциометра соединен посредством подшипника скольжения, к которому фактически добавлен вертикальный плавающий канал на основании фигуры 1, или на основании ФИГ. 4 и ФИГ. 5 исключен второй комплект механизмов компенсации для нижнего перекрытия, при этом вектор правого переднего колеса представляет собой вектор перемещения, соответствующий ключевой контрольной точке Gi в правом канале, и вектор правого заднего колеса представляет перемещение cosβi, то есть вертикальное перемещение от точки пересечения поперечного и вертикального каналов к центру рулевого вала. В то время, как в транспортном средстве, в котором на двух передних колесах установлен механизм компенсации трапециевидного качающегося рычага с радиальной тягой, например, как на ФИГ. 2, ФИГ. 4 и ФИГ. 5, вектор левого переднего колеса соответствует перемещению ключевой контрольной точки Gi в левой прорези скольжения, и вектор левого заднего колеса соответствует левой вертикальной прорези R*cosβi (т.е. на потенциометре, установленном на одной стороне вертикальных прорезей, зафиксировано вертикальное перемещение точки пересечения поперечной прорези и вертикальной прорези от центра рулевого вала, клемма управления рельсовой направляющей, к которой присоединена контактная щетка, или конец натянутого шнура подвижной катушки потенциометра с датчиком Холла присоединен к нижнему концу поперечного четвертого ползуна, который вертикально пересекает вертикальную прорезь и следует в поперечном направлении). И правое переднее колесо соответствует перемещению ключевой контрольной точки Gi в правом канале, и правое заднее колесо соответствует перемещению в правой вертикальной прорези R * cosβi (т.е. на потенциометре, установленном на одной стороне вертикального канала, зафиксировано вертикальное перемещение точки пересечения поперечного и вертикального каналов от центра рулевого вала, клемма управления рельсовой направляющей, к которой присоединена контактная щетка, или конец натянутого шнура подвижной катушки потенциометра с датчиком Холла присоединен к нижнему концу поперечного четвертого ползуна, который вертикально пересекает вертикальную прорезь и следует в поперечном направлении), соответствующий подшипник скольжения соединен с регулируемым концом управления управляющего потенциометра, а именно щеткой потенциометра сопротивления скольжению или концом шнура подвижной катушки потенциометра с датчиком Холла.
Напряжение, полученное с помощью потенциометра сопротивления скольжению или бесконтактного потенциометра с датчиком Холла, представляющее собой целевое значение напряжения дифференциала с электронным управлением транспортного средства, сравнивается с измеренным напряжением тахометрического генератора, для управления сервоприводом дифференциала с помощью отрицательной обратной связи после усиления дифференциального электрического сигнала используется сравнительный контур уравновешивания потенциалов диода с двумя выводами. В предпочтительном варианте осуществления изобретения, направление вектора всех колес всегда согласуется с векторным электронным дифференциальным регулированием, которое представляет собой дифференциальный режим управления, не обеспечиваемый известным трапециевидным рулевым управлением, и может адаптироваться к различным дорогам путем регулирования базового значения сопротивления и управления чувствительностью, реагировать быстрее, чем электронная блокировка дифференциала EATON, и позволяет не превышать среднюю угловую скорость внутренней полуоси колеса.
Представлено многоколесное транспортное средство, которое включает кузов транспортного средства, вышеуказанный механизм управления и предохранительный ограничитель, при этом предохранительный ограничитель включает кулачковый механизм корректирования давления пружины и высокоскоростной предохранительный механизм ограничения угла поворота, которые последовательно закреплены на рулевой колонке от верхней части к нижней; реагирующий на давление датчик сопротивления выполнен с возможностью вставки в отделяемую часть стержня вала рулевой колонки и зазор между радиальной тягой и обеими сторонам выемки кольцевого диска, и соответственно соединен посредством проводов с управляющими контурами усилителя рулевого механизма транспортного средства по часовой стрелке и против часовой стрелки, и рулевая колонка, соответствующая нижнему концу выемки кольцевого диска, соединена с возможностью движения со стрежнем вращающегося вала радиальной тяги посредством вращающегося карданного вала; реечное рулевое управление с червячным валом является вспомогательным для рулевого механизма транспортного средства, управляемого реагирующим на давление датчиком сопротивления, или зацепляющаяся шестерня со спиральным стержнем непосредственно соединена с вращающимся валом-шестерней, выполненным на радиальной тяге для приведения в движение вспомогательной системы рулевого управления; осевой центр сплошного рулевого вала вертикально соединен с полуосью ступицы транспортного средства, и предохранительный ограничитель используется для ограничения угла поворота α рулевого колеса до значения менее 3 градусов, если скорость транспортного средства больше 80 км/ч.
По сравнению с известным уровнем техники, изобретение, касающееся многоколесного транспортного средства, позволяет упростить конструкцию механизма рулевого управления за счет того, что радиальная тяга и трапециевидный качающийся рычаг интегрированы в одно целое и расположены перпендикулярно друг другу, и на основании существующего механизма трапециевидного рулевого управления транспортного средства, может быть реализовано универсальное рулевое управление путем добавления передаточного рычага двумерного комплексного управления, что снижает стоимость изготовления, удобно для установки и безопасно и надежно при использовании. Все нормали ступиц колес и полуоси ступиц идентично указывают на тот же центр рулевого управления мгновенного перемещения, что исключает занос в сторону. Согласно изобретению, до тех пор, пока позволяет подвеска, угол поворота рулевого вала может поворачиваться по полному кругу, и в данном процессе предотвращен боковой увод шины.
При выходе за пределы известного ограничения трапециевидного рулевого управления в 40 градусов, смещение компенсации косинуса приводит к продольному перемещению передаточного рычага двумерного комплексного управления, чтобы стать главной вспомогательной силой рулевого управления, и угол поворота последовательно входит во второй квадрант через прямое угловое положение, или даже продолжает поворот по полному кругу до четырех квадрантов, что является очевидным отличием между изобретением и известным трапециевидным рулевым управлением, и объектом применения рулевого управления с большим углом, главным образом, является боковая парковка на низкой скорости обычного транспортного средства или погрузчика с вилочным захватом.
При этом кулачковый механизм корректирования давления пружины включает пружину, прижимную пластину, направляющий стержень и восьмигранный кулачок, один конец пружины соединен с кузовом транспортного средства, другой конец соединен с прижимной пластиной, и направляющий стержень закреплен рядом со стороной пружины прижимной пластины, и другой конец пружины закреплен на направляющем стержне; восьмигранный кулачок имеет восемь плоскостей, которые закреплены на рулевой колонке и соприкасаются с прижимной пластиной; пружина толкает прижимную пластину и направляющий стержень для сжатия восьмигранного кулачка с надлежащим давлением и разделения полного круга угла поворота α рулевого вала на восемь частей, с -35 ~ + 35 градусами в качестве начальной поверхности. В процессе ручной разблокировки водителем состояния управления рулевым колесом, угол поворота автоматически сбрасывается до наиболее близкого и безопасного угла поворота при текущем угле поворота, например, прямая с нулевым углом, рулевое управление с фиксированным кругом под углом 45 градусов, поворот на месте под прямым углом и т.д., для обеспечения того, что момент корректирования восьмигранного кулачка характеризуется силой давления 2-5 Н на ручку рулевого колеса, и достигается цель механического корректирования рулевого колеса.
В высокоскоростном предохранительном механизме ограничения угла поворота, тахометрический генератор, установленный на каждой ведущей полуоси, создает средний векторный дифференциальный источник питания, и источник питания приводит в движение механизм вольтметра, на вращающемся валу конструкции вольтметра расположена пара ограничительных вилок, и между внутренней стороной ограничительной вилки и радиальной тягой на направляющей колонке оставлен определенный зазор, когда радиус радиальной тяги равен 80 мм, на одной стороне допускается зазор только в 4.2 мм, и допускается угол поворота только плюс или минус 3 градуса, и в обычном статическом состоянии ограничительной вилки, приводимой в движение с помощью вольтметра, ограничительные вилки близки к горизонтальному состоянию, и отсутствует ограничение угла поворота радиальной тяги, и когда скорость транспортного средства увеличивается, механизм вольтметра поворачивает ограничительную вилку и постепенно опускается вниз и стремится к вертикальному положению. Когда скорость транспортного средства ниже 10 км/ч, угол отклонения ограничительной вилки меньше 30 градусов, ограничительная вилка не ограничена контактом с основанием радиальной тяги, и угол поворота является произвольным; когда скорость транспортного средства достигает 50 км/ч, ограничительная вилка достигает положения угла отклонения в 60 градусов, допустимый угол поворота левого зазора составляет плюс или минус 6.05 градусов, и когда скорость транспортного средства превышает 80 км/ч, ограничительная вилка поворачивается вертикально. Зазор (4.2 мм) дистального конца радиальной тяги допускает поворот только на плюс или минус 3 градуса, и центробежная сила при повороте транспортного средства равна умноженному на 0.4 ускорению свободного падения, что входит в безопасный диапазон центростремительной силы, создаваемой силой трения дороги (как правило, система трения дороги составляет 0.45 ~ 0.6). В установочном положении реагирующего на давление датчика сопротивления, стержень вала рулевой колонки отсоединен, и реагирующий на давление датчик сопротивления вставлен между двумя сторонами радиальной тяги и короткой колонки на кольцевом диске, два реагирующих на давление датчика сопротивления выполнены с возможностью управления вспомогательным усилием по часовой стрелке и против часовой стрелки, соответственно. Таким образом, реализуется управление избыточным усилием рулевого управления угла поворота рулевого колеса, и обеспечивается безопасность транспортного средства.
Представлен способ управления для механизма идентичного рулевого управления трапециевидным качающимся рычагом с радиальной тягой, при этом способ включает: образование прямоугольного треугольника путем вертикального размещения радиальной тяги и трапециевидного качающегося рычага, при этом радиальная тяга представляет собой ребро скручивания прямоугольного треугольника, трапециевидный качающийся рычаг представляет собой ребро зацепления, и выносная линия хордовое ребро указывает на центр рулевого управления рамы, центр рулевого управления рамы представляет собой неподвижную ось, которая не принимает участие в рулевом управлении; поворот угла α рулевого колеса равен 90 градусам для того, чтобы перемещающийся центр рулевого управления совпал с точкой центра рулевого управления рамы, при этом ребро зацепления отклоняется вместе с ребром скручивания, и продольное перемещение верхней части ребра зацепления равно R*cosβ=R*cosα+(R*M/H)*sinα, что представляет собой универсальную формулу рулевого управления, выведенную из формулы рулевого управления Аккермана; шарнирное соединение конца трапециевидного качающегося рычага, который также представляет собой верхнюю часть ребра зацепления, с поперечной прорезью передаточного рычага двумерного комплексного управления для регулирования продольного перемещения косинуса, при этом поперечная прорезь соединена со вторым ползуном; шарнирное соединение концевого подшипника радиальной тяги, который также представляет собой точку пересечения ребра скручивания и прямоугольного треугольника, с синусоидальным шатуном для регулирования синусоидального перемещения, при этом синусоидальный шатун соединен с первым ползуном, и затем соединение вертикальной прорези для передачи синусоидального перемещения вертикальной прорези, и управление передаточным рычагом двумерного комплексного управления в горизонтальном и вертикальном направлениях; шарнирное соединение двумерной комплексной критической контрольной точки Gi с третьим ползуном через соединительный рычаг с помощью передаточного рычага двумерного комплексного управления, таким образом создавая угол поворота (βi) за счет подвижного управления прорезью скольжения; образование эллиптического указателя отклонения путем комбинации прямоугольного треугольника с радиальной тягой и крестообразной прорези передаточного рычага двумерного комплексного управления.
В способе изобретения, вершина прямоугольного треугольника с внешней стороны крестообразной прорези выполнена в качестве неподвижной оси вращения и начала полярных координат, и при условии удерживания поперечной и вертикальной прорези крестообразной прорези эллиптического указателя горизонтальной и вертикальной, эллиптический указатель выполнен с возможностью вращения как единое целое, когда приводится в движение прямоугольным треугольником, и использует точку пересечения Gi крестообразной прорези в качестве щетки для выведения эллипса отклонения.
Краткое описание чертежей
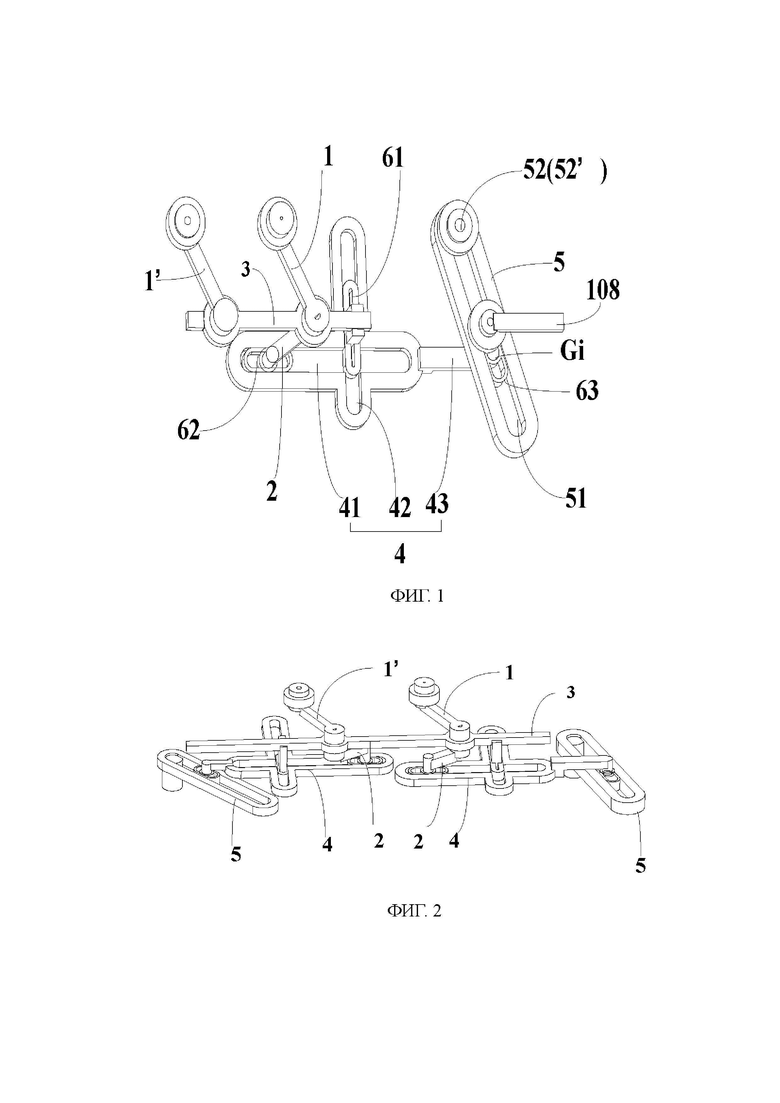
ФИГ. 1 представляет собой принципиальное структурное изображение одного варианта осуществления механизма идентичного рулевого управления трапециевидным качающимся рычагом с радиальной тягой с односторонней компенсацией косинуса правого переднего колеса.
ФИГ. 2 представляет собой принципиальное структурное изображение одного варианта осуществления однорядного расположения механизма идентичного рулевого управления трапециевидным качающимся рычагом с радиальной тягой с двусторонней компенсацией косинуса левого и правого колес.
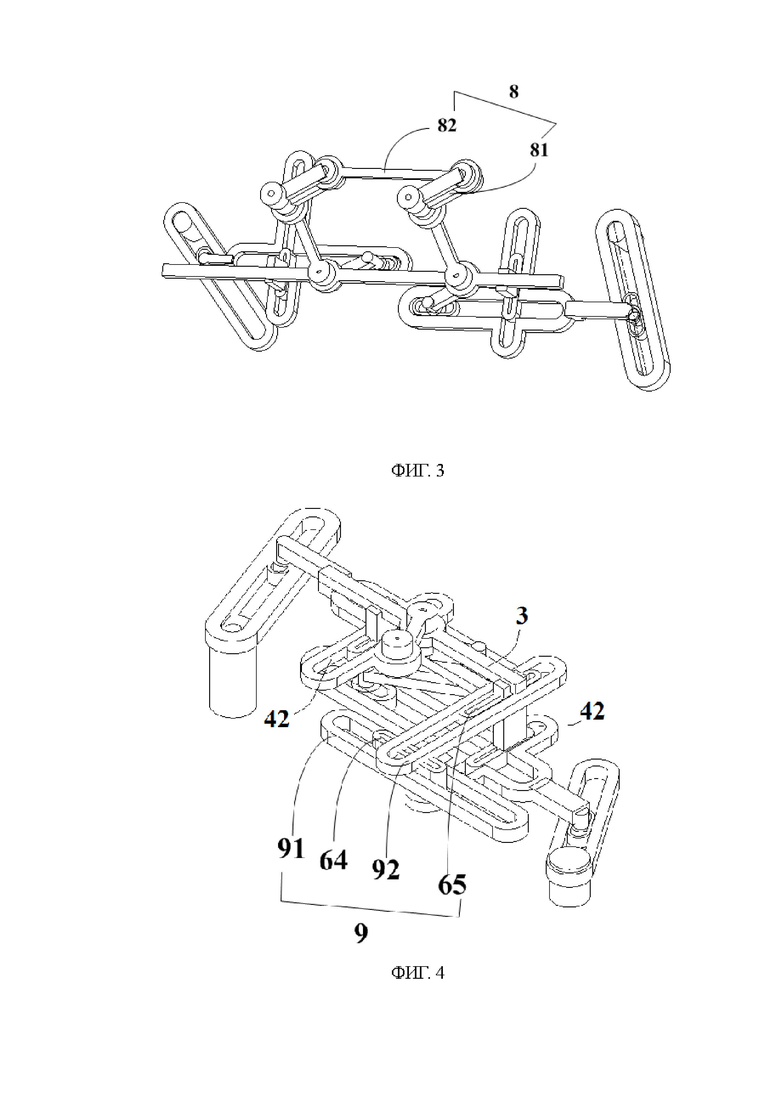
ФИГ. 3 представляет собой принципиальное структурное изображение другого варианта осуществления однорядного расположения механизма идентичного рулевого управления трапециевидным качающимся рычагом с радиальной тягой с двусторонней компенсацией косинуса левого и правого колес.
ФИГ. 4 представляет собой принципиальное структурное изображение одного варианта осуществления перекрывающего расположения механизма идентичного рулевого управления трапециевидным качающимся рычагом с радиальной тягой с двусторонней компенсацией косинуса левого и правого колес.
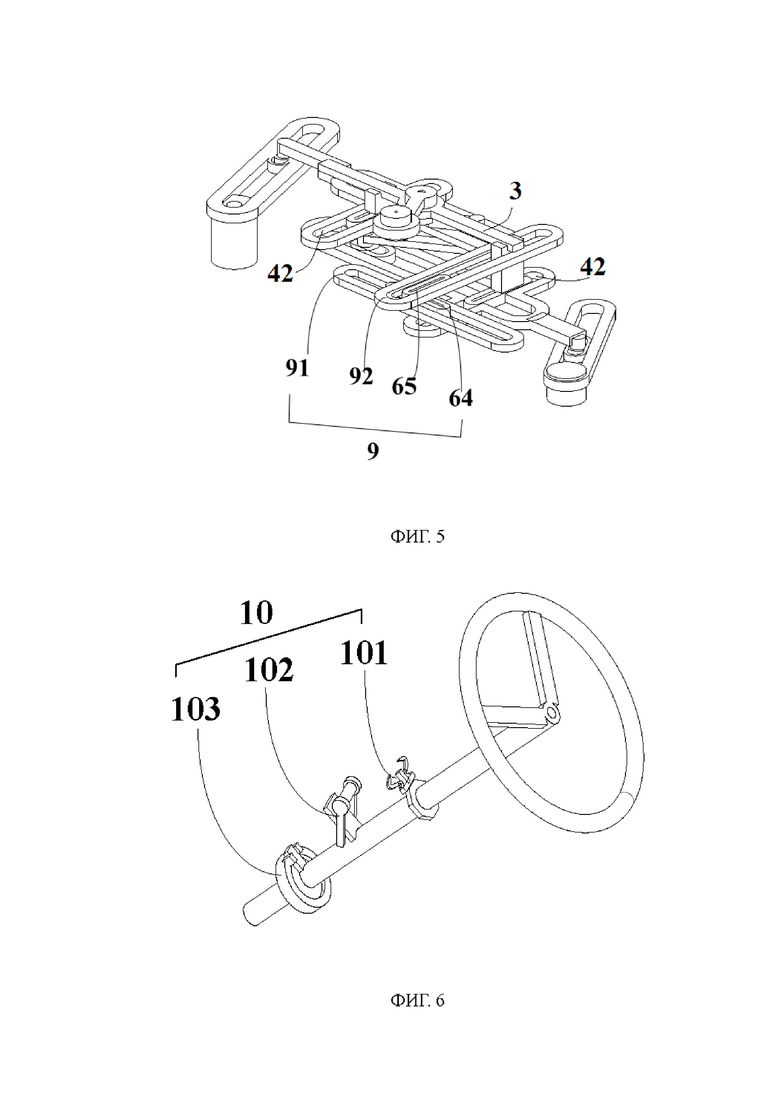
ФИГ. 5 представляет собой принципиальное структурное изображение другого варианта осуществления расположения слоями механизма идентичного рулевого управления трапециевидным качающимся рычагом с радиальной тягой с двусторонней компенсацией косинуса левого и правого колес.
ФИГ. 6 представляет собой принципиальное изображение установочного положения предохранительного ограничителя на многоколесном транспортном средстве.
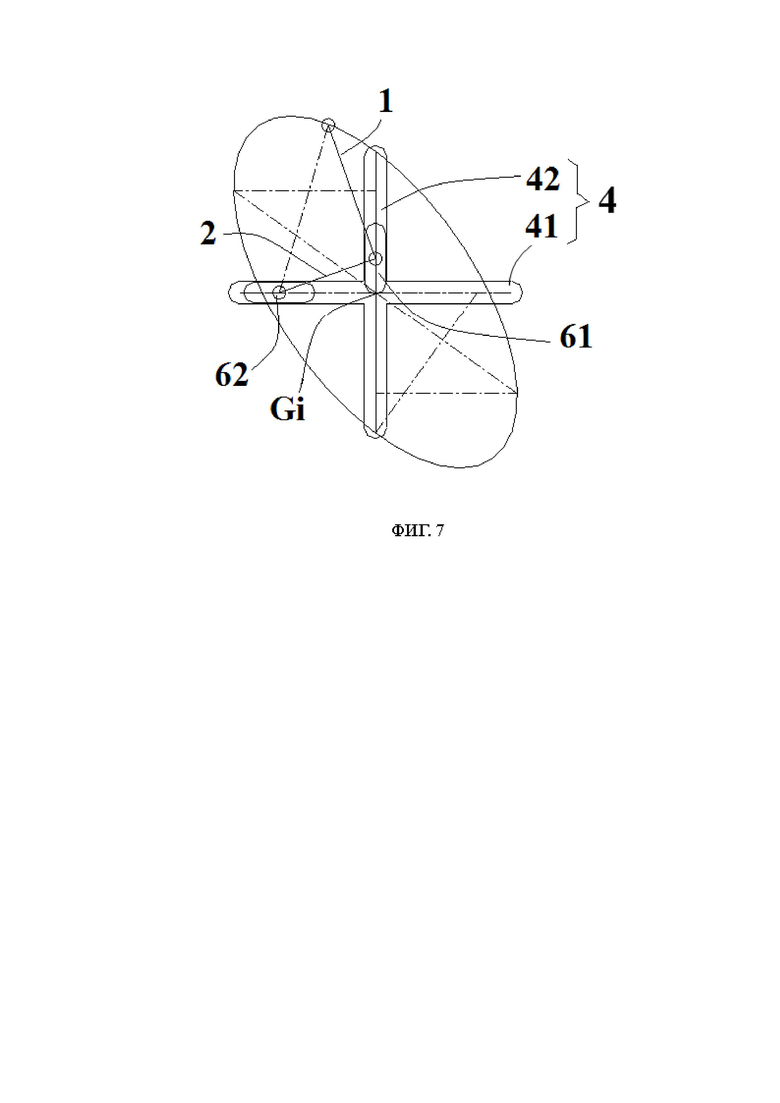
ФИГ. 7 представляет собой принципиальное изображение механизма идентичного рулевого управления для трапециевидного качающегося рычага с радиальной тягой.
Подробное описание вариантов осуществления изобретения
Ниже подробно описано изобретение вместе с конкретными вариантами осуществления, что не следует рассматривать как ограничение объема его охраны.
Ссылаясь на ФИГ. 1, настоящее изобретение обеспечивает вариант осуществления односторонней компенсации правого колеса, механизм идентичного рулевого управления трапециевидным качающимся рычагом 2, составляющим единое целое с радиальной тягой 1, установленный в середине переднего конца кузова транспортного средства и не обладающий функцией рулевого управления задними колесами транспортного средства, включающий:
Радиальную тягу 1, один конец радиальной тяги 1 соединен с нижней частью рулевой колонки, при этом угол поворота рулевого колеса равен α, длина радиальной тяги 1 равна R; вращение рулевого колеса обеспечивает перемещение радиальной тяги 1 для образования синуса sinα и косинуса cosα, вместе с тем, синус sinα и косинус cosα рассчитаны таким образом, чтобы соответствовать вращению рулевого колеса.
Трапециевидный качающийся рычаг 2, один конец трапециевидного качающегося рычага перпендикулярно соединен с другим концом радиальной тяги 1, при этом в фиксированной точке трапециевидного качающегося рычага и радиальной тяги сформирован зафиксированный вал маятника; длина трапециевидного качающегося рычага 2 равна R*M/Hi, и трапециевидный качающийся рычаг выполнен с возможностью отклонения вместе с углом поворота α рулевого колеса, и одновременно создает эффект продольной компенсации косинуса (R*N/Hi)*sinα и продольное перемещение R*cosα±(R*M/HI)*sinα.
Синусоидальный шатун 3, синусоидальный шатун 3 выполнен в виде горизонтального стержня, расположенного в горизонтальном направлении, и имеет две втулки, при этом зафиксированный вал маятника выполнен с возможностью вставки в первую втулку, и синусоидальный шатун 3 вертикально расположен между радиальной тягой 1 и трапециевидным качающимся рычагом 2, чтобы следовать за зафиксированным валом маятника.
Ведомую радиальную тягу 1’, при этом один конец ведомой радиальной тяги 1’ выполнен с возможностью шарнирного крепления во второй втулке, вместе с тем, другой конец выполнен с возможностью шарнирного крепления к раме, и ведомая радиальная тяга 1’ параллельна радиальной тяге 1 и имеет такую же длину, и в сочетании с синусоидальным шатуном 3 и радиальной тягой 1, формируется параллельный четырехзвенный шарнирный механизм.
Передаточный рычаг двумерного комплексного управления 4, при этом на передаточном рычаге двумерного комплексного управления 4 расположена крестообразная прорезь, и поперечная прорезь 41 крестообразной прорези параллельна полуосям на обеих сторонах, вместе с тем вертикальная прорезь 42 крестообразной прорези параллельна продольному направлению кузова транспортного средства; и на одной стороне поперечной прорези 41 выполнен соединительный рычаг 43.
Качающийся рычаг векторного управления 5, на качающемся рычаге векторного управления 5 расположена прорезь скольжения 51, и начальное положение направления установки прорези скольжения 51 параллельно направлению расположения радиальной тяги 1.
Множество ползунов, первый ползун 61 выполнен с возможностью крепления на одном конце синусоидального шатуна 3 и скольжения в вертикальной прорези 42 для формирования горизонтального синусоидального перемещения R*sinα передаточного рычага двумерного комплексного управления 4; второй ползун 62 выполнен с возможностью шарнирного крепления на другом конце трапециевидного качающегося рычага 2 и скольжения в поперечной прорези 41 для создания продольного перемещения передаточного рычага двумерного комплексного управления 4, постоянно равного R*cosα±(R*M/Hi)*sinα, таким образом управляя передаточным рычагом двумерного комплексного управления 4 для перемещения вверх и вниз, влево и вправо по вертикали и горизонтали; третий ползун 63 выполнен с возможностью шарнирного соединения с одним концом соединительного рычага 43 для образования критической контрольной точки (Gi) и скольжения в прорези скольжения 51.
К прорези скольжения 51 присоединен вспомогательный рулевой вал 52’ или сплошной рулевой вал 52, и третий ползун 63 выполнен с возможностью приведения в движение прорези скольжения 51 для поворота вокруг вспомогательного рулевого вала 52’, заставляя вспомогательный рулевой вал 52’ создавать угол поворота βi, кроме того, сплошной рулевой вал 52 выполнен с возможностью соединения с синхронным валом-шестерней или параллельным шатуном 108, или двойным шатуном кривошипного механизма; или сплошной рулевой вал 52 непосредственно соединен и управляется качающимся рычагом векторного управления 5, и третий ползун 63 выполнен с возможностью приведения в движение прорези скольжения 51 для поворота вокруг сплошного рулевого вала 52 для образования угла поворота βi, таким образом, сплошной рулевой вал 52 выполнен с возможностью соединения в осевом и вертикальном направлениях с полуосью ступицы для достижения R*cosβi=R*cosα±R*M/H*sinα.
В варианте осуществления изобретения, радиальная тяга и трапециевидный качающийся рычаг интегрированы в один корпус и расположены перпендикулярно друг другу, упрощена конструкция механизма рулевого управления, и для реализации постоянного универсального рулевого управления на основании существующего механизма трапециевидного рулевого управления транспортного средства может быть добавлен передаточный рычаг двумерного комплексного рулевого управления, что снижает стоимость изготовления, удобно для установки и безопасно и надежно при использовании. Все нормали ступиц колес и полуоси ступиц идентично указывают на аналогичный центр рулевого управления мгновенного перемещения, что исключает занос в сторону. Согласно технической схеме изобретения, до тех пор, пока позволяет подвеска, угол поворота рулевого вала может поворачиваться по полному кругу, и в данном процессе предотвращается боковой увод шины, в случае нарушения известного предела трапециевидного рулевого управления в 40 градусов, смещение компенсации косинуса приводит к продольному перемещению передаточного рычага двумерного комплексного управления, чтобы стать главной вспомогательной силой рулевого управления, и угол поворота последовательно входит во второй квадрант через прямое угловое положение, или даже продолжает поворот по полному кругу до четырех квадрантов, что является очевидным отличием между настоящим изобретением и известным трапециевидным рулевым управлением, и объектом применения рулевого управления с большим углом является, главным образом, боковая парковка на низкой скорости обычного транспортного средства или погрузчика с вилочным захватом.
В предпочтительном варианте осуществления изобретения, длина радиальной тяги 1 R определяется пространством для установки в кузове транспортного средства, пространство для установки отличается для различных типов транспортных средств, и расчет и выбор осуществляется в соответствии с типами транспортных средств, например, 75 мм, 105 мм или 125 мм.
В предпочтительном варианте осуществления изобретения, каждый из первого ползуна 61 и второго ползуна 62 имеет длину, более чем в два раза превышающую ширину поперечной прорези крестообразной прорези, в случае, если первый ползун 61 или второй ползун 62 выскользнет из крестообразной прорези.
В предпочтительном варианте осуществления изобретения, механизм управления дополнительно включает корпус, радиальная тяга 1, ведомая радиальная тяга 1', трапециевидный качающийся рычаг 2, синусоидальный шатун 3, передаточный рычаг двумерного комплексного управления 4, качающийся рычаг векторного управления 5 и ползуны, все закреплены в корпусе, и нижняя часть рулевой колонки выполнена с возможностью вставки в верхнюю часть корпуса и соединена с радиальной тягой 1, и вспомогательный рулевой вал 52' выполнен с возможностью выступать из корпуса для соединения синхронного вала-шестерни или параллельного шатуна 108, или двойного шатуна кривошипного механизма со сплошным рулевым валом 52. В варианте осуществления изобретения, корпус блокирует пыль и загрязнения с внешней стороны, кроме того, в соответствующем положении вытянутого конца рулевого вала и корпуса расположен уплотнительный элемент, и для снижения рабочего сопротивления и охлаждения деталей внутри корпуса можно ввести смазочное масло в корпус.
Ссылаясь на ФИГ. 2, трапециевидный качающийся рычаг 2, передаточный рычаг двумерного комплексного управления 4, качающийся рычаг векторного управления 5 и ползуны выполнены в виде двух комплектов; при этом первый комплект выполнен активным, второй комплект выполнен ведомым, и трапециевидный качающийся рычаг 2 в первом комплекте выполнен с возможностью крепления в первой втулке и параллельно радиальной тяге 1; вместе с тем, трапециевидный качающийся рычаг 2 во втором комплекте выполнен с возможностью крепления во второй втулке и параллельным трапециевидному качающемуся рычагу 2 в первом комплекте; на другой стороне поперечной прорези 41 передаточного рычага двумерного комплексного управления 4 во втором комплекте выполнен соединительный рычаг, и соединительный рычаг во втором комплекте выполнен с возможностью приведения в движение качающегося рычага векторного управления 5 во втором комплекте посредством третьего ползуна 63 во втором комплекте, и установочные положения первого ползуна 61 и второго ползуна 62 во втором комплекте аналогичны установочным положениям и соединительным взаимосвязям в первом комплекте, соответственно; эффект варианта осуществления изобретения заключается в том, что может быть получена компенсация косинуса левого и правого передних колес, и поскольку при функционировании в режиме «ведущий-ведомый» используется один синусоидальный шатун 3, может быть реализовано рулевое управление с острым углом.
В предпочтительном варианте осуществления изобретения, ссылаясь на ФИГ. 3, на основании ФИГ. 2, кривошипный механизм с двойным шатуном выполнен с возможностью присоединения в положении оси шарнирного соединения радиальной тяги 1 и ведомой радиальной тяги 1’, и кривошипный механизм с двойным шатуном образован путем добавления кривошипа 81 фиксированной длины в аналогичном вертикальном относительном расположении, что радиальная тяга 1 и ведомая радиальная тяга 1’, и соединен с помощью шатуна кривошипа 82, при этом радиус кривошипа 81 фиксированной длины является постоянным значением от R/2 до 4R/5; преимущество заключается в том, что угол поворота может быть увеличен до тупого угла на основе вышеуказанного варианта осуществления двусторонней компенсации для рулевого управления с острым углом.
В предпочтительном варианте осуществления изобретения, ссылаясь на ФИГ. 4 и ФИГ. 5, трапециевидный качающийся рычаг 2, передаточный рычаг двумерного комплексного управления 4, качающийся рычаг векторного управления 5 и ползуны выполнены в виде двух комплектов; при этом передаточный рычаг двумерного комплексного управления 4 в первом комплекте расположен на верхнем уровне рядом с рамой, в то время, как передаточный рычаг двумерного комплексного управления 4 во втором комплекте установлен на более низком уровне относительно передаточного рычага двумерного комплексного управления 4 в первом комплекте для обеспечения начального положения α = β = 0; кривошипный подшипник на конце трапециевидных качающихся рычагов 2 в первой группе выполнен с возможностью прохождения через нижнюю часть второго ползуна 62, присоединения к трапециевидному качающемуся рычагу 2 второго комплекта и, следовательно, соединения для приведения в движение второго ползуна 62 во втором комплекте; и первый ползун 61 второго комплекта закреплен на другом конце синусоидального шатуна 3 и выполнен с возможностью перемещения вместе с радиальной тягой 1 и синусоидальным шатуном 3; длина трапециевидного качающегося рычага 2 второго комплекта в два раза больше длины трапециевидного качающегося рычага 2 первой группы, и трапециевидные качающиеся рычаги двух комплектов соответственно соединены со вторыми ползунами 62; при этом, ведомая радиальная тяга 1' выполнена с возможностью замены плавающим вертикальным каналом 9, расположенным на раме, и плавающий вертикальный канал 9 выполнен с возможностью соединения и управления синусоидальным шатуном 3 для удерживания параллельно оси, при этом плавающий вертикальный канал 9 включает горизонтальный плавающий канал 91, неподвижно соединенный с рамой и параллельный оси, и вертикальный плавающий канал 92, расположенный перпендикулярно относительно горизонтального плавающего канала 91; в горизонтальном плавающем канале 91 выполнен поперечный четвертый ползун 64, и горизонтальный плавающий канал 91 соединен с вертикальным плавающим каналом 92 посредством поперечного четвертого ползуна 64; в вертикальном плавающем канале 92 расположен с возможностью скольжения продольный пятый ползун 65, продольный пятый ползун 65 соединен с первым ползуном 61; или поперечный четвертый ползун 64 вертикально неподвижно соединен с продольным пятым ползуном 65, который соединен с возможностью скольжения с вертикальным плавающим каналом 92, и поперечный четвертый ползун 64 соединен с возможностью скольжения с горизонтальным плавающим каналом 91, и вертикальный плавающий канал 92 неподвижно соединен с синусоидальным шатуном 3; поперечный четвертый ползун 64 проходит в близком расположении друг к другу на обеих сторонах, и верхний конец поперечного четвертого ползуна 64 проходит ниже вертикальной прорези 42 передаточного рычага двумерного комплексного управления 4 первого комплекта, и нижний конец поперечного четвертого ползуна 64 проходит выше вертикальной прорези 42 передаточного рычага двумерного комплексного управления 4 второго комплекта и параллельно противоположной стороне квадратной рамы вместе с синусоидальным шатуном; плавающий вертикальный канал 9 выполнен с возможностью управления синусоидальным шатуном 3 для перемещения относительно плавающего вертикального канала в горизонтальном и вертикальном направлениях. Данный вариант осуществления двусторонней компенсации косинуса левого и правого передних колес применим для внедорожников с шасси высокой проходимости за счет многоуровневого размещения механизмов на обеих сторонах, а также удобен для обеспечения герметичности в корпусе.
В варианте осуществления переднеприводного транспортного средства городского типа, как показано на ФИГ. 1, транспортного средства без механизма компенсации трапециевидного качающегося рычага с тягой для левого переднего колеса, вектор левого переднего колеса равен длине R соответствующей радиальной тяги 1 (потенциометр имеет фиксированную длину и может быть заменен фиксированным стандартным резистором в различных местах), и вектор правого переднего колеса представляет собой вектор перемещения шарнирно соединенного третьего ползуна 63, соответствующего ключевой контрольной точке Gi в правой прорези скольжения 51. На одной стороне прорези скольжения 51 установлен потенциометр сопротивления скольжению или бесконтактный потенциометр с датчиком Холла, и клемма управления рельсовой направляющей, к которой присоединена контактная щетка, или конец шнура подвижной катушки потенциометра с датчиком Холла соединен с третьим ползуном 63 совместно с подшипником критической контрольной точки, при условии, что источником питания является средний источник питания, сформированный тахометрическим генератором, приводимым в действие левой и правой полуосями, целевое значение напряжения дифференциала с электрическим регулированием ведущей полуоси правого переднего колеса получено от потенциометра, и напряжение целевого значения дифференциала с электронным регулированием ведущей полуоси левого переднего колеса получено от фиксированного стандартного резистора, осуществляется сравнение с измеренным напряжением генератора измерения скорости ведущей полуоси передних колес на обеих сторонах, в сравнительном контуре уравновешивания потенциалов диода с двумя выводами, управление сервоприводом дифференциала осуществляется с помощью отрицательной обратной связью при усилении дифференциального электрического сигнала. Это стандарт городского внедорожника с векторным звеном дифференциала электронного управления, заднее колесо представляет собой неподвижное промежуточное зубчатое колесо, прицеп допускается при подъеме передних колес.
Например, в полноприводном транспортном средстве, механизм рулевого управления полноприводного транспортного средства управляет направлением вектора переднего колеса, а также длиной вектора полноприводного управления.
В транспортном средстве без механизма компенсации трапециевидного качающегося рычага с тягой в левом переднем колесе, вектор левого переднего колеса равен длине R соответствующей радиальной тяги (при этом потенциометр имеет фиксированную длину и может быть заменен стандартным резистором в различных местах), и теоретически, вектор левого заднего колеса представляет собой перемещение R* cosα в вертикальном плавающем канале 92 (если требуется дифференциальная передача левых задних колес, необходимо установить плавающий канал, пятый ползун 65 соединен с вертикальным плавающим каналом 92, или первый ползун 61 заключен в вертикальном плавающем канале 92, на одной стороне вертикального плавающего канала 92 размещен потенциометр, клемма управления потенциометра соединена посредством подшипника пятого ползуна 65 или первого ползуна 61, к которому фактически добавлен вертикальный плавающий канал 92 на основании фигуры 1, или на основании ФИГ. 4 и ФИГ. 5 исключен второй комплект механизмов компенсации для нижнего перекрытия), при этом вектор правого переднего колеса представляет собой вектор перемещения, соответствующий ключевой контрольной точке Gi в правой прорези скольжения 51 (на одной стороне прорези скольжения 51 установлен потенциометр сопротивления скольжению или бесконтактный потенциометр с датчиком Холла, и клемма управления рельсовой направляющей, к которой присоединена контактная щетка, или конец шнура подвижной катушки потенциометра с датчиком Холла соединен с третьим ползуном 63), и вектор правого заднего колеса представляет перемещение R*cosβi правой вертикальной прорези, т.е. вертикальное перемещение от точки пересечения поперечной и вертикальной прорезей к центру рулевого вала (на одной стороне правой вертикальной прорези 42 установлен потенциометр, клемма управления рельсовой направляющей, к которой присоединена контактная щетка, или конец шнура подвижной катушки потенциометра с датчиком Холла соединен с верхним концом поперечного четвертого ползуна 64, проходящего до положения точки пересечения правой вертикальной прорези 42).
В полноприводном варианте осуществления, на обеих сторонах на передних колесах установлен механизм компенсации трапециевидного качающегося рычага с радиальной тягой, показанный на ФИГ. 2, ФИГ. 4 и ФИГ.5, вектор левого переднего колеса соответствует перемещению ключевой контрольной точки Gi в левой прорези скольжения 51, и вектор левого заднего колеса соответствует левой вертикальной прорези 42 R*cosβi (т.е. на потенциометре, установленном на одной стороне вертикальных прорезей 42, зафиксировано вертикальное перемещение точки пересечения поперечной прорези и вертикальной прорези 42 от центра рулевого вала, клемма управления рельсовой направляющей, к которой присоединена контактная щетка, или конец натянутого шнура подвижной катушки потенциометра с датчиком Холла соединен с нижним концом поперечного четвертого ползуна 64, который вертикально пересекает вертикальную прорезь 42 и следует в поперечном направлении). И правое переднее колесо соответствует перемещению ключевой контрольной точки Gi в правой прорези скольжения 51, (на одной стороне прорези скольжения 51 установлен потенциометр сопротивления скольжению или бесконтактный потенциометр с датчиком Холла, и клемма управления рельсовой направляющей, к которой присоединена контактная щетка, или конец шнура подвижной катушки потенциометра с датчиком Холла соединен с третьим ползуном 63), и правое заднее колесо соответствует перемещению в правой вертикальной прорези 42 R * cosβi (т.е. на потенциометре, установленном на одной стороне вертикальной прорези 42, зафиксировано вертикальное перемещение точки пересечения поперечной и вертикальной прорези 42 от центра рулевого вала, клемма управления рельсовой направляющей, к которой присоединена контактная щетка, или конец натянутого шнура подвижной катушки потенциометра с датчиком Холла соединен с нижним концом поперечного четвертого ползуна 64, который вертикально пересекает вертикальную прорезь 42 и следует в поперечном направлении), соответствующий подшипник скольжения соединен с регулируемым концом управления управляющего потенциометра, а именно щеткой потенциометра сопротивления скольжению или концом шнура подвижной катушки потенциометра с датчиком Холла. Напряжение движущего целевого значения, соответствующего начальному нулевому положению каждого потенциометра представляет собой стандартный радиус R.
В варианте рулевого управления передними колесами без привода и задними колесами с приводом, приводные устройства для рулевого управления передними колесами и задними колесами требуют только исключения потенциометра вектора привода передних колес и сохранения в полноприводном варианте транспортного средства. В процессе рулевого управления с большим углом, дифференциал с электронным управлением заднего колеса становится основным фактором мощности рулевого управления.
Средний источник питания формируется посредством выпрямления тахометрических генераторов, которые участвуют в управлении движением, и осуществляется перераспределение потенциометра сопротивления скольжению или бесконтактного потенциометра с датчиком Холла от напряжения среднего источника питания пропорционально длине вектора. Полученное напряжение представляет собой целевое значение напряжения, соответствующее дифференциалу с электронным регулированием ведущей полуоси, и в сравнении с измеренным потенциалом тахометрического генератора, для управления сервоприводом дифференциала с помощью отрицательной обратной связи после усиления дифференциального электрического сигнала используется сравнительный контур уравновешивания потенциалов диода с двумя выводами. В сервоприводе скорости дифференциала, можно выбрать несколько опций, таких как электронное предельное скольжение тормозной муфты, распределение мощности управления электронным переключением питания двигателя ступицы или электронное бесступенчатое изменение скорости бесступенчатой трансмиссии (CVT), электронное бесступенчатое переключение передач трансмиссии гидравлического насоса с планетарной передачей и т.д.
Вектор направления всех колес всегда согласуется с векторным дифференциальным электронным регулированием, которое представляет собой дифференциальный режим управления, не обеспечиваемый известным трапециевидным рулевым управлением, и может адаптироваться к различным дорогам путем регулирования базового значения сопротивления и управления чувствительностью, реагировать быстрее, чем электронная блокировка дифференциала EATON, и позволяет не превышать среднюю угловую скорость внутренней полуоси колеса.
Представлено многоколесное транспортное средство, которое включает кузов транспортного средства, вышеуказанный механизм управления и предохранительный ограничитель 10, при этом предохранительный ограничитель 10 включает кулачковый механизм корректирования давления пружины 101 и высокоскоростной предохранительный механизм ограничения угла поворота 102, которые последовательно закреплены на рулевой колонке от верхней части к нижней части; реагирующий на давление датчик сопротивления 103 выполнен с возможностью вставки в отсоединяемую часть стержня вала рулевой колонки и зазор между радиальной тягой 1 и двумя сторонами выемки кольцевого диска, и соответственно соединен посредством проводов с управляющими контурами усилителя рулевого механизма транспортного средства по часовой стрелке и против часовой стрелки, и рулевая колонка, соответствующая нижнему концу выемки кольцевого диска, соединена с возможностью движения со стержнем вращающегося вала радиальной тяги 1 посредством вращающегося карданного вала; реечное рулевое управление с червячным валом является вспомогательным для рулевого механизма транспортного средства, управляемого реагирующим на давление датчиком сопротивления 103, или зацепляющаяся шестерня со спиральным стержнем непосредственно соединена с вращающимся валом-шестерней, выполненным на радиальной тяге 1 для приведения в движение вспомогательной системы рулевого управления; осевой центр сплошного рулевого вала вертикально соединен с полуосью ступицы транспортного средства, и предохранительный ограничитель 10 используется для ограничения угла поворота α рулевого колеса до значения менее 3 градусов, если скорость транспортного средства превышает 80 км/ч.
В предпочтительном варианте осуществления изобретения, кулачковый механизм корректирования давления пружины 101 включает пружину, прижимную пластину, направляющий стержень и восьмигранный кулачок, один конец пружины соединен с кузовом транспортного средства, другой конец соединен с прижимной пластиной, и направляющий стержень закреплен рядом со стороной пружины прижимной пластины, и другой конец пружины закреплен на направляющем стержне; восьмигранный кулачок имеет восемь плоскостей, которые закреплены на рулевой колонке и соприкасаются с прижимной пластиной; пружина толкает прижимную пластину и направляющий стержень для сжатия восьмигранного кулачка с надлежащим давлением и разделения полного круга угла поворота α рулевого вала на восемь частей, с -35 ~ + 35 градусами в качестве начальной поверхности. В процессе ручной разблокировки водителем состояния управления рулевым колесом, угол поворота автоматически сбрасывается до наиболее близкого и безопасного угла поворота при текущем угле поворота, например, прямая с нулевым углом, рулевое управление с фиксированным кругом под углом 45 градусов, поворот на месте под прямым углом и т.д., для обеспечения того, что момент корректирования восьмигранного кулачка характеризуется силой давления 2-5 Н на ручку рулевого колеса, и достигается цель механического корректирования рулевого колеса.
В предпочтительном варианте осуществления изобретения, в высокоскоростном предохранительном механизме ограничения угла поворота 102, тахометрический генератор, установленный на каждой ведущей полуоси, создает средний векторный дифференциальный источник питания, и источник питания приводит в движение механизм вольтметра, на вращающемся валу конструкции вольтметра расположена пара ограничительных вилок, и между внутренней стороной ограничительной вилки и радиальной тягой на направляющей колонке оставлен определенный зазор, когда радиус радиальной тяги равен 80 мм, на одной стороне допускается зазор только в 4.2 мм, и допускается угол поворота только плюс или минус 3 градуса, и в обычном статическом состоянии ограничительной вилки, приводимой в движение с помощью вольтметра, ограничительные вилки близки к горизонтальному состоянию, и отсутствует ограничение угла поворота радиальной тяги, и когда скорость транспортного средства увеличивается, механизм вольтметра поворачивает ограничительную вилку и постепенно опускается вниз и стремится к вертикальному положению. Когда скорость транспортного средства ниже 10 км/ч, угол отклонения ограничительной вилки меньше 30 градусов, ограничительная вилка не ограничена контактом с основанием радиальной тяги, и угол поворота является произвольным; когда скорость транспортного средства достигает 50 км/ч, ограничительная вилка достигает положения угла отклонения в 60 градусов, допустимый угол поворота левого зазора составляет плюс или минус 6.05 градусов, и когда скорость транспортного средства превышает 80 км/ч, ограничительная вилка поворачивается вертикально. Зазор (4.2 мм) дистального конца радиальной тяги допускает поворот только на плюс или минус 3 градуса, и центробежная сила при повороте транспортного средства равна умноженному на 0.4 ускорению свободного падения, что входит в безопасный диапазон центростремительной силы, создаваемой силой трения дороги (как правило, система трения дороги составляет 0.45 ~ 0.6). В установочном положении реагирующего на давление датчика сопротивления 103, стержень вала рулевой колонки отсоединен, и реагирующий на давление датчик сопротивления 103 вставлен между двумя сторонами радиальной тяги и короткой колонки на кольцевом диске, два реагирующих на давление датчика сопротивления 103 выполнены с возможностью управления вспомогательным усилием по часовой стрелке и против часовой стрелки, соответственно. Таким образом, реализуется управление избыточным усилием рулевого управления угла поворота рулевого колеса, и обеспечивается безопасность транспортного средства.
В вышеуказанном варианте осуществления изобретения, вершина прямоугольного треугольника с внешней стороны крестообразной прорези выполнена в качестве неподвижной оси вращения и начала полярных координат, и при условии удерживания поперечной и вертикальной прорези крестообразной прорези эллиптического указателя горизонтальным и вертикальным, эллиптический указатель выполнен с возможностью вращения как единое целое, когда приводится в движение прямоугольным треугольником, и использует точку пересечения Gi крестообразной прорези в качестве щетки для выведения эллипса отклонения.
В частности, ссылаясь на ФИГ. 7, представлен способ управления для механизма идентичного рулевого управления трапециевидным качающимся рычагом с радиальной тягой, при этом способ включает: образование прямоугольного треугольника путем вертикального размещения радиальной тяги 1 и трапециевидного качающегося рычага 2, при этом радиальная тяга 1 представляет собой ребро скручивания прямоугольного треугольника, трапециевидный качающийся рычаг 2 представляет собой ребро зацепления, и выносная линия хордовое ребро указывает на центр рулевого управления рамы, центр рулевого управления рамы представляет собой неподвижную ось, которая не принимает участие в рулевом управлении; поворот угла α рулевого колеса равен 90 градусам для того, чтобы перемещающийся центр рулевого управления совпал с точкой центра рулевого управления рамы, при этом ребро зацепления отклоняется вместе с ребром скручивания, и продольное перемещение верхней части ребра зацепления равно R*cosβ=R*cosα+(R*M/H)*sinα, что представляет собой универсальную формулу рулевого управления, выведенную из формулы рулевого управления Аккермана; шарнирное соединение конца трапециевидного качающегося рычага 2, который также представляет собой верхнюю часть ребра зацепления, с поперечной прорезью 41 передаточного рычага двумерного комплексного управления 4 для регулирования продольного перемещения косинуса, при этом поперечная прорезь 41 соединена со вторым ползуном 62; шарнирное соединение концевого подшипника радиальной тяги, который также представляет собой точку пересечения ребра скручивания и прямоугольного треугольника, с синусоидальным шатуном 3 для регулирования синусоидального перемещения, при этом синусоидальный шатун 3 соединен с первым ползуном 61, и затем соединение вертикальной прорези 42 для передачи синусоидального перемещения вертикальной прорези 42, и управление передаточным рычагом двумерного комплексного управления 4 в горизонтальном и вертикальном направлениях; шарнирное соединение двумерной комплексной критической контрольной точки Gi с третьим ползуном 63 через соединительный рычаг с помощью передаточного рычага двумерного комплексного управления 4, таким образом создавая угол поворота (βi) за счет подвижного управления прорезью скольжения 51; образование эллиптического указателя отклонения путем комбинации прямоугольного треугольника с радиальной тягой 1 и крестообразной прорези передаточного рычага двумерного комплексного управления 4.
| название | год | авторы | номер документа |
|---|---|---|---|
| Стабилизирующее буксирное устройство одноосного прицепа с регулируемым наклоном шкворня | 2021 |
|
RU2771088C1 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ И ТЯЖЕЛОЕ ТРАНСПОРТНОЕ СРЕДСТВО КОЛЕСНОГО ТИПА С НЕЗАВИСИМОЙ ПОДВЕСКОЙ | 2014 |
|
RU2634738C2 |
| МНОГООПОРНАЯ ШАГАЮЩАЯ МАШИНА | 2003 |
|
RU2258624C2 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ С ПРИВОДОМ НА ПЕРЕДНИЕ И ЗАДНИЕ КОЛЕСА | 1992 |
|
RU2032569C1 |
| ЛОПАСТНОЕ КОЛЕСО С ОДНИМ ОБОДОМ ДЛЯ ВЕТРОТУРБИННОЙ ГЕНЕРАТОРНОЙ УСТАНОВКИ | 2015 |
|
RU2687546C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ | 2004 |
|
RU2271955C1 |
| ПРОПУЛЬСИВНЫЙ КОМПЛЕКС ТОРПЕДЫ, СПОСОБ РАБОТЫ И ВАРИАНТЫ ДВИЖИТЕЛЯ | 2020 |
|
RU2757339C1 |
| КУЛЬТИВАТОР | 1995 |
|
RU2090025C1 |
| КОЛЯСКА ДЛЯ ЛИЦ С ОГРАНИЧЕННЫМИ ФИЗИЧЕСКИМИ ВОЗМОЖНОСТЯМИ | 2024 |
|
RU2840843C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2008 |
|
RU2392166C1 |
Группа изобретений относится к вариантам выполнения механизма и способу идентичного рулевого управления трапециевидным качающимся рычагом с радиальной тягой, а также к многоколесному транспортному средству. Трапециевидный качающийся рычаг с радиальной тягой имеет форму прямоугольного треугольника, и в сочетании с передаточным рычагом двумерного комплексного управления крестообразной прорези, сформированной поперечной прорезью и вертикальной прорезью, образован эллиптический указатель; с помощью ползунов в поперечной прорези регулируется продольное перемещение косинуса, и поперечное перемещение синуса может контролироваться путем соединения ползунов в вертикальной прорези после шарнирного соединения прямоугольного концевого подшипника с шатунами, концевой подшипник на передаточном рычаге двумерного комплексного управления, а именно подшипник ключевой контрольной точки, описывает эллиптическую траекторию отклонения, и шарнирный ползун с подшипником ключевой контрольной точки соединен с качающимся рычагом векторного управления для образования угла поворота βi. Обеспечивается простота конструкции и преодоление бокового увода колес и вибрации рулевого колеса вследствие ограничения трапециевидного рулевого управления при повороте и при парковке транспортного средства. 4 н. и 6 з.п. ф-лы, 7 ил.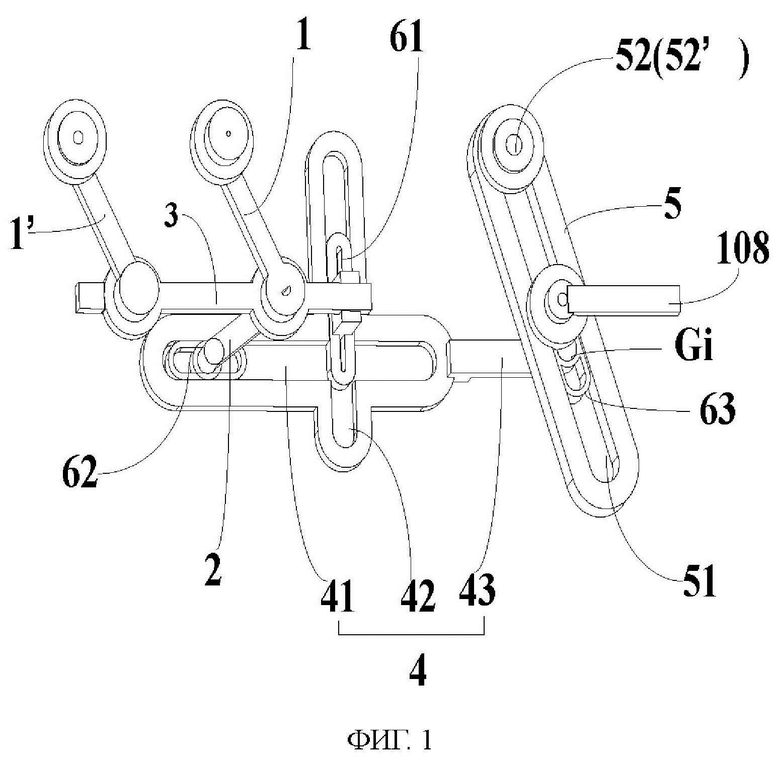
1. Механизм идентичного рулевого управления трапециевидным качающимся рычагом с радиальной тягой, установленный в середине переднего конца кузова транспортного средства, не обладающий функцией рулевого управления задними колесами транспортного средства, включающий:
радиальную тягу, один конец которой соединен с нижней частью рулевой колонки, при этом угол поворота рулевого колеса равен α, длина радиальной тяги равна R; вращение рулевого колеса обеспечивает перемещение радиальной тяги для создания синуса sinα и косинуса cosα, вместе с тем синус sinα и косинус cosα рассчитаны таким образом, чтобы соответствовать вращению рулевого колеса;
трапециевидный качающийся рычаг, один конец которого перпендикулярно соединен с другим концом радиальной тяги, при этом в фиксированной точке трапециевидного качающегося рычага и радиальной тяги сформирован зафиксированный вал маятника; длина трапециевидного качающегося рычага составляет R*M/Hi, и трапециевидный качающийся рычаг выполнен с возможностью отклонения вместе с углом α рулевого колеса и обеспечения эффекта продольной компенсации косинуса (R*N/Hi)*sinα и продольного перемещения R*cosα±(R*M/HI)*sinα;
синусоидальный шатун, выполненный в виде горизонтального стержня, расположенного в горизонтальном направлении, и имеющий две втулки, при этом зафиксированный вал маятника выполнен с возможностью вставки в первую втулку, и синусоидальный шатун вертикально расположен между радиальной тягой и трапециевидным качающимся рычагом, чтобы следовать за зафиксированным валом маятника;
ведомую радиальную тягу, при этом один конец ведомой радиальной тяги выполнен с возможностью шарнирного крепления во второй втулке, в то время как другой конец выполнен с возможностью шарнирного крепления к раме, и ведомая радиальная тяга параллельна радиальной тяге и имеет такую же длину, и в сочетании с синусоидальным шатуном и радиальной тягой формирует параллельный четырехзвенный шарнирный механизм;
передаточный рычаг двумерного комплексного управления, при этом на передаточном рычаге двумерного комплексного управления расположена крестообразная прорезь, и поперечная прорезь крестообразной прорези параллельна полуосям на обеих сторонах, в то время как вертикальная прорезь крестообразной прорези параллельна продольному направлению кузова транспортного средства; и на одной стороне поперечной прорези выполнен соединительный рычаг;
качающийся рычаг векторного управления, на котором выполнена прорезь скольжения, и начальное положение направления установки прорези скольжения параллельно направлению расположения радиальной тяги;
множество ползунов, первый из которых выполнен с возможностью крепления на одном конце синусоидального шатуна и скольжения в вертикальной прорези для формирования горизонтального синусоидального перемещения R*sinα передаточного рычага двумерного комплексного управления; второй ползун выполнен с возможностью шарнирного крепления на другом конце трапециевидного качающегося рычага и скольжения в поперечной прорези для создания продольного перемещения передаточного рычага двумерного комплексного управления, постоянно равного R*cosα±(R*M/Hi)*sinα, таким образом управляя передаточным рычагом двумерного комплексного управления для перемещения вверх и вниз, влево и вправо по вертикали и горизонтали; третий ползун выполнен с возможностью шарнирного соединения с одним концом соединительного рычага для образования критической контрольной точки (Gi) и скольжения в прорези скольжения; к прорези скольжения присоединен вспомогательный рулевой вал или сплошной рулевой вал, и третий ползун выполнен с возможностью приведения в движение прорези скольжения для поворота вокруг вспомогательного рулевого вала, заставляя вспомогательный рулевой вал создавать угол поворота βi, кроме того, сплошной рулевой вал выполнен с возможностью соединения с синхронным валом-шестерней или параллельным шатуном, или двойным шатуном кривошипного механизма; или сплошной рулевой вал непосредственно соединен и выполнен с возможностью управления качающимся рычагом векторного управления, и третий ползун выполнен с возможностью приведения в движение прорези скольжения для поворота вокруг сплошного рулевого вала для создания угла поворота βi, а сплошной рулевой вал выполнен с возможностью соединения в осевом и вертикальном направлениях с полуосью ступицы для достижения R*cosβi=R*cosα±R*M/H*sinα.
2. Механизм управления по п. 1, отличающийся тем, что длина радиальной тяги R определена пространством для установки в кузове транспортного средства.
3. Механизм управления по п. 1, отличающийся тем, что каждый из первого ползуна и второго ползуна имеет длину, более чем в два раза превышающую ширину поперечной прорези крестообразной прорези.
4. Механизм управления по п. 1, дополнительно включающий: корпус; в котором закреплены радиальная тяга, ведомая радиальная тяга, трапециевидный качающийся рычаг, синусоидальный шатун, передаточный рычаг двумерного комплексного управления, качающийся рычаг векторного управления и ползуны; нижняя часть рулевой колонки выполнена с возможностью вставки в верхнюю часть корпуса и соединена с радиальной тягой; и вспомогательный рулевой вал выполнен с возможностью выхода из корпуса для соединения синхронного вала-шестерни или параллельного шатуна, или двойного шатуна кривошипного механизма со сплошным рулевым валом.
5. Механизм управления по любому из пп. 1-4, отличающийся тем, что трапециевидный качающийся рычаг, передаточный рычаг двумерного комплексного управления, качающийся рычаг векторного управления и ползуны выполнены в виде двух комплектов; первый комплект выполнен активным, второй комплект выполнен ведомым, и трапециевидный качающийся рычаг в первом комплекте выполнен с возможностью крепления в первой втулке и параллельно радиальной тяге; в то время как трапециевидный качающийся рычаг во втором комплекте выполнен с возможностью крепления во второй втулке и параллельным трапециевидному качающемуся рычагу в первом комплекте; на другой стороне поперечной прорези передаточного рычага двумерного комплексного управления во втором комплекте выполнен соединительный рычаг, и соединительный рычаг во втором комплекте выполнен с возможностью приведения в движения качающегося рычага векторного управления во втором комплекте посредством третьего ползуна во втором комплекте, и установочные положения первого ползуна и второго ползуна во втором комплекте аналогичны установочным положениям и соединительным взаимосвязям в первом комплекте соответственно.
6. Механизм управления по п. 5, отличающийся тем, что кривошипный механизм с двойным шатуном выполнен с возможностью присоединения в положении оси шарнирного соединения радиальной тяги и ведомой радиальной тяги, и кривошипный механизм с двойным шатуном образован путем добавления кривошипов фиксированной длины в аналогичном вертикальном относительном расположении, что и радиальная тяга и ведомая радиальная тяга, и соединенных с помощью шатуна кривошипа, при этом радиус кривошипа фиксированной длины является постоянным значением от R/2 до 4R/5.
7. Механизм идентичного рулевого управления трапециевидным качающимся рычагом с радиальной тягой, установленный в середине переднего конца кузова транспортного средства, не обладающий функцией рулевого управления задними колесами транспортного средства, включающий:
радиальную тягу, один конец которой соединен с нижней частью рулевой колонки, при этом угол поворота рулевого колеса равен α, длина радиальной тяги равна R; вращение рулевого колеса обеспечивает перемещение радиальной тяги для создания синуса sinα и косинуса cosα, вместе с тем синус sinα и косинус cosα рассчитаны таким образом, чтобы соответствовать вращению рулевого колеса;
трапециевидный качающийся рычаг, один конец которого перпендикулярно соединен с другим концом радиальной тяги, при этом в фиксированной точке трапециевидного качающегося рычага и радиальной тяги сформирован зафиксированный вал маятника; длина трапециевидного качающегося рычага составляет R*M/Hi, и трапециевидный качающийся рычаг выполнен с возможностью отклонения вместе с углом α рулевого колеса и обеспечения эффекта продольной компенсации косинуса (R*N/Hi)*sinα и продольного перемещения R*cosα±(R*M/HI)*sinα;
синусоидальный шатун, выполненный в виде горизонтального стержня, расположенного в горизонтальном направлении, и имеющий две втулки, при этом зафиксированный вал маятника выполнен с возможностью вставки в первую втулку, и синусоидальный шатун вертикально расположен между радиальной тягой и трапециевидным качающимся рычагом, чтобы следовать за зафиксированным валом маятника;
плавающий вертикальный канал, расположенный на раме, выполненный с возможностью соединения и управления синусоидальным шатуном для удерживания параллельно оси, при этом плавающий вертикальный канал включает горизонтальный плавающий канал, неподвижно соединенный с рамой и параллельный оси, и вертикальный плавающий канал, расположенный перпендикулярно относительно горизонтального плавающего канала;
передаточный рычаг двумерного комплексного управления, при этом на передаточном рычаге двумерного комплексного управления расположена крестообразная прорезь, и поперечная прорезь крестообразной прорези параллельна полуосям на обеих сторонах, в то время как вертикальная прорезь крестообразной прорези параллельна продольному направлению кузова транспортного средства;
качающийся рычаг векторного управления, на котором выполнена прорезь скольжения, и начальное положение направления установки прорези скольжения параллельно направлению расположения радиальной тяги;
множество ползунов, первый из которых выполнен с возможностью крепления на одном конце синусоидального шатуна и скольжения в вертикальной прорези для формирования горизонтального синусоидального перемещения R*sinα передаточного рычага двумерного комплексного управления; второй ползун выполнен с возможностью шарнирного крепления на другом конце трапециевидного качающегося рычага и скольжения в поперечной прорези для создания продольного перемещения передаточного рычага двумерного комплексного управления, постоянно равного R*cosα±(R*M/Hi)*sinα, таким образом управляя передаточным рычагом двумерного комплексного управления для перемещения вверх и вниз, влево и вправо по вертикали и горизонтали; третий ползун выполнен с возможностью шарнирного соединения с одним концом соединительного рычага для образования критической контрольной точки (Gi) и скольжения в прорези скольжения; к прорези скольжения присоединен вспомогательный рулевой вал или сплошной рулевой вал, и третий ползун выполнен с возможностью приведения в движение прорези скольжения для поворота вокруг вспомогательного рулевого вала, заставляя вспомогательный рулевой вал создавать угол поворота βi, кроме того, сплошной рулевой вал выполнен с возможностью соединения с синхронным валом-шестерней или параллельным шатуном, или двойным шатуном кривошипного механизма; или сплошной рулевой вал непосредственно соединен и выполнен с возможностью управления качающимся рычагом векторного управления, и третий ползун выполнен с возможностью приведения в движение прорези скольжения для поворота вокруг сплошного рулевого вала для создания угла поворота βi, а сплошной рулевой вал выполнен с возможностью соединения в осевом и вертикальном направлениях с полуосью ступицы для достижения R*cosβi=R*cosα±R*M/H*sinα,
при этом трапециевидный качающийся рычаг, передаточный рычаг двумерного комплексного управления, качающийся рычаг векторного управления и ползуны выполнены в виде двух комплектов, и передаточный рычаг двумерного комплексного управления в первом комплекте расположен на верхнем уровне рядом с рамой, в то время как передаточный рычаг двумерного комплексного управления во втором комплекте установлен на более низком уровнем относительно передаточного рычага двумерного комплексного управления в первом комплекте для обеспечения начального положения α=β=0; кривошипный подшипник на конце трапециевидных качающихся рычагов в первой группе выполнен с возможностью прохождения через нижнюю часть второго ползуна, соединения с трапециевидным качающимся рычагом второго комплекта и, следовательно, соединения для приведения в движение второго ползуна во втором комплекте; и первый ползун второго комплекта закреплен на другом конце синусоидального шатуна и выполнен с возможностью перемещения вместе с радиальной тягой и синусоидальным шатуном; длина трапециевидного качающегося рычага второго комплекта в два раза больше длины трапециевидного качающегося рычага первой группы, и трапециевидные качающиеся рычаги двух комплектов соответственно соединены со вторыми ползунами;
в горизонтальном плавающем канале выполнен поперечный четвертый ползун, и горизонтальный плавающий канал соединен с вертикальным плавающим каналом посредством поперечного четвертого ползуна; в вертикальном плавающем канале расположен с возможностью скольжения продольный пятый ползун, продольный пятый ползун соединен с первым ползуном; или поперечный четвертый ползун вертикально неподвижно соединен с продольным пятым ползуном, который соединен с возможностью скольжения с вертикальным плавающим каналом, и поперечный четвертый ползун соединен с возможностью скольжения с горизонтальным плавающим каналом, и вертикальный плавающий канал неподвижно соединен с синусоидальным шатуном; поперечный четвертый ползун выполнен в близком расположении друг к другу с обеих сторон, и верхний конец поперечного четвертого ползуна выполнен ниже вертикальной прорези передаточного рычага двумерного комплексного управления первого комплекта, и нижний конец поперечного четвертого ползуна выполнен выше вертикальной прорези передаточного рычага двумерного комплексного управления второго комплекта и параллельно противоположной стороне квадратной рамы вместе с синусоидальным шатуном; плавающий вертикальный канал выполнен с возможностью управления синусоидальным шатуном для перемещения относительно плавающего вертикального канала в горизонтальном и вертикальном направлениях.
8. Механизм управления по п. 7, отличающийся тем, что эффект рулевого управления рулевого механизма рассчитан на управление направлением вектора левого переднего, левого заднего, правого переднего и правого заднего колес и прорезями скольжения, регулирующими длину рычага векторного управления, при этом прорези скольжения, регулирующие длину рычага векторного управления относятся к прорези скольжения рычага векторного управления, вертикальной прорези и вертикальному плавающему каналу, и на одной стороне прорезей скольжения, которые регулируют длину рычага векторного управления, неподвижно установлен потенциометр, и потенциометр представляет собой потенциометр прямого тока сопротивления скольжению или бесконтактный потенциометр переменного тока с датчиком Холла, и клемма управления рельсовой направляющей потенциометра сопротивления скольжению или конец натянутого шнура подвижной катушки бесконтактного потенциометра с датчиком Холла соединен с блоками скольжения, которые смещены вдоль прорезей скольжения, напряжение движущего целевого значения, соответствующее начальному нулевому положению каждого потенциометра, равно стандартному радиусу R; для каждой ведущей полуоси, реализующей векторное звено дифференциала с электронным управлением, с возможностью установки потенциометра в соответствующем положении для получения целевого значения напряжения, требуемого для рулевого механизма векторного звена дифференциала с электрическим управлением.
9. Многоколесное транспортное средство, включающее: кузов транспортного средства, механизм управления транспортного средства по п. 1 или 7 и предохранительный ограничитель; при этом предохранительный ограничитель включает кулачковый механизм корректирования давления пружины и высокоскоростной предохранительный механизм ограничения угла поворота, которые последовательно закреплены на рулевой колонке от верхней части к нижней части; реагирующий на давление датчик сопротивления выполнен с возможностью вставки в отсоединяемую часть стержня вала рулевой колонки и зазор между радиальной тягой и двумя сторонами выемки кольцевого диска и соответственно соединен посредством проводов с управляющими контурами усилителя рулевого механизма транспортного средства по часовой стрелке и против часовой стрелки, и рулевая колонка, соответствующая нижнему концу выемки кольцевого диска, соединена со стержнем вращающегося вала радиальной тяги посредством вращающегося карданного вала; рулевой механизм транспортного средства, управляемый реагирующим на давление датчиком сопротивления дополнен реечным рулевым управлением с червячным валом или зацепляющейся шестерней со спиральным стержнем, непосредственно соединенной с вращающимся валом-шестерней, выполненным на радиальной тяге для приведения в движение вспомогательной системы рулевого управления; осевой центр сплошного рулевого вала вертикально соединен с полуосью ступицы транспортного средства, и предохранительный ограничитель выполнен для ограничения угла поворота α рулевого колеса до значения менее 3 градусов, когда скорость транспортного средства больше 80 км/ч.
10. Способ управления для механизма идентичного рулевого управления трапециевидным качающимся рычагом с радиальной тягой, включающий: образование прямоугольного треугольника путем вертикального расположения радиальной тяги и трапециевидного качающегося рычага, при этом радиальная тяга представляет собой ребро скручивания прямоугольного треугольника, трапециевидный качающийся рычаг представляет собой ребро зацепления, и выносная линия хордового ребра указывает на центр рулевого управления рамы, представляющего собой неподвижную ось, которая не принимает участие в рулевом управлении; поворот угла α рулевого колеса равен 90 градусам для того, чтобы перемещающийся центр рулевого управления совпал с точкой центра рулевого управления рамы, при этом ребро зацепления отклоняется вместе ребром скручивания, и продольное перемещение верхней части ребра зацепления равно R*cosβ=R*cosα+(R*M/H)*sinα, что представляет собой универсальную формулу рулевого управления, выведенную из формулы рулевого управления Аккермана; шарнирное соединение конца трапециевидного качающегося рычага, который также представляет собой верхнюю часть ребра зацепления, с поперечной прорезью передаточного рычага двумерного комплексного управления для регулирования продольного перемещения косинуса, при этом поперечная прорезь соединена со вторым ползуном; шарнирное соединение концевого подшипника радиальной тяги, который также представляет собой точку пересечения ребра скручивания и прямоугольного треугольника, с синусоидальным шатуном для регулирования синусоидального перемещения, при этом синусоидальный шатун соединен с первым ползуном, и затем соединение вертикальной прорези для передачи синусоидального перемещения вертикальной прорези, и управление передаточным рычагом двумерного комплексного управления в горизонтальном и вертикальном направлениях; шарнирное соединение двумерной комплексной критической контрольной точки Gi с третьим ползуном через соединительный рычаг с помощью передаточного рычага двумерного комплексного управления, таким образом создавая угол поворота (βi) за счет подвижного управления прорезью скольжения; образование эллиптического указателя отклонения путем комбинации прямоугольного треугольника с радиальной тягой и крестообразной прорези передаточного рычага двумерного комплексного управления.
| CN 204623555 U, 09.09.2015 | |||
| CN 206734393 U, 12.12.2017 | |||
| CN 104670303 A, 03.06.2015 | |||
| CN 104443025 A, 25.03.2015 | |||
| US 2010326762 A1, 30.12.2010. |

