Предлагаемое изобретение относится к сосудам с уплотнением и компенсатором радиальных и осевых биений вала сосуда (сосуд) под давлением или вакуумированным с компенсатором радиальных и осевых биений вала сосуда (компенсатором) и может быть использовано в машиностроении, атомной, биологической, химической и электронной промышленности для уплотнения вращающихся валов сосудов, имеющих высокий уровень радиальных и осевых биений в местах уплотнения.
Известны сосуды с уплотнением вращающихся валов сосудов торцевыми уплотнениями [Уплотнения и уплотнительная техника: Справочник/ Л.А. Кондаков, А.И. Голубев, В.Б. Овандер и др. – М.: Машиностроение, 1986. - 464 с. (с. 288-350)], содержащими уплотняющие кольца, герметично сопряженные, соответственно, с валом сосуда и корпусом сосуда, плотно прижатые друг другу по торцевым поверхностям с зазором между ними равным нулю, подвижным друг относительно друга и обеспечивающим компенсацию радиального биения вала сосуда за счет радиального смещения одного из уплотняющих колец относительно другого в радиальном направлении, а компенсацию осевого биения за счет осевой деформации упругих элементов, например, сильфонов.
Недостатками устройства являются принципиальная необходимость поверхностей трения уплотняющих колец, трущихся друг о друга при вращении вала сосуда, со скоростью, определяемой частотой вращения вала и радиусом расположения точки контакта. Это порождает высокий момент трения и, соответственно, высокий уровень потерь и нагрева. К недостаткам следует отнести и износ поверхностей трения, что требует достаточно частой замены уплотняющих колец. Наличие продуктов износа уплотняющих колец ограничивает область применения торцевых уплотнений по условиям чистоты продукта в сосуде.
Известны сосуды в виде сопряженных выхлопных труб с компенсаторами смещений, например, [Патент США 5779282, F16L 27/06, Exhaust ball seal], которые содержат сферические поверхности на концевых частях двух частей выхлопной трубы, с помощью которых обеспечивается их сопряжение, компенсация погрешностей изготовления и возможность смещения выхлопной трубы относительно корпуса автомобиля за счет поворота в сферическом сочленении в радиальной плоскости при смещениях наружных частей автомобиля.
Подобные конструкции предназначены для статической компенсации погрешностей изготовления элементов системы выхлопа и конструктивно не имеют вращающихся элементов внутри указанного компенсатора.
Известен сосуд с магнитожидкостным уплотнением (МЖУ) для уплотнения вращающихся валов сосудов [А.С. 892075, F16J 15/40, Магнитно-жидкостное уплотнение]. Сосуд содержит неподвижный корпус и подвижный вал сосуда и опоры движения вала сосуда. Вал МЖУ выполнен полым, охватывающим вал сосуда, а комплекс радиальных и аксиальных зазоров между магнитопроводами, заполненными магнитной жидкостью (МЖ), обеспечивает уплотнение и компенсацию радиального и осевого биений вала сосуда, т.е. играет роль компенсатора.
Недостатком конструкции является сложность ее изготовления и сборки, требующая высокой точности изготовления деталей при ограниченном уровне компенсации биений. Вместе с тем, компенсатор связан с поверхностями сопряжения вала сосуда и вала МЖУ, вращающихся синхронно без скольжения в тангенциальном направлении.
Известен сосуд с уплотнением его вращающегося вала. В качестве уплотнения установлено МЖУ [АС 1227885, F16J 15/40], которое содержит плавающий стакан, охватывающий вал сосуда, вал уплотнения и магнитную систему МЖУ и выполняющий роль компенсатора. При этом плавающий стакан жестко связан с магнитной системой МЖУ а через подшипники с валом МЖУ и валом сосуда. При биениях вала сосуда они передаются на вал МЖУ и через подшипники МЖУ на плавающий стакан с магнитной системой. Магнитная система существенно увеличивает массу плавающего стакана, что приводит к резкому увеличению вибрационных нагрузок на подшипники МЖУ. Аналогично, компенсатор связан с поверхностями сопряжения вала сосуда и вала МЖУ, вращающихся синхронно без скольжения в тангенциальном направлении
В качестве прототипа принят сосуд с компенсатором радиальных и осевых биений вала сосуда [А.С. 1227884, F16J 15/40], содержащий неподвижный корпус и подвижный относительно него вал сосуда, опоры движения вала сосуда и уплотнение, содержащее корпус уплотнения, вал уплотнения и опору движения вала уплотнения относительно корпуса уплотнения. В качестве уплотнения выполнено МЖУ. Компенсатором служит жестко, неподвижно и герметично связанный болтами блок промежуточной втулки и втулки вала (компенсатор), одним концом герметично сопряженный с втулкой вала сосуда, а вторым - с подшипником МЖУ, являясь его опорой. Посадки в местах сопряжений определяются требованиями к посадкам подшипников и к соединениям неподвижных соединений уплотнений резиновыми кольцами. Требуемый для вращения вала МЖУ момент передается от вала сосуда к валу уплотнения через ряд деталей, в том числе и промежуточную втулку (компенсатор). Поэтому вал сосуда и вал МЖУ вращаются синхронно. Осевая компенсация биений вала сосуда осуществляется за счет кинематической подвижности в осевом направлении втулки вала сосуда. Уплотнение между ними обеспечивает резиновое кольцо.
Указанный блок компенсируют радиальное биение вала сосуда за счет выборки зазоров только в месте уплотнения втулки вала на валу сосуда и в месте установки промежуточной втулки в подшипник за счет выборки зазора в подшипнике и зазоров в местах посадок подшипника. Так как указанные зазоры малы, а компенсация осуществляется лишь за счет выборки указанных зазоров, как показано ниже, требуется значительная длина компенсатора в осевом направлении. Это обстоятельство сужает диапазон компенсируемых радиальных биений вала сосуда и приводит к увеличению габаритов сосуда.
Задачей предлагаемого изобретения расширение диапазона компенсации радиальных и осевых биений валов герметичных сосудов при уменьшении габаритов компенсатора.
Технический результат, достигаемый данным изобретением, заключается в уменьшении габаритов компенсатора, особенно вдоль его оси вращения (длины) при существенном увеличении компенсируемых радиальных и осевых биений вала сосуда при передаче валу МЖУ требуемого для его вращения момента и практическом исключении воздействия на вал МЖУ радиальных и осевых нагрузок от вала сосуда. Уменьшение осевых габаритов компенсатора сокращает и габариты сосуда.
Технический результат достигается за счет того, что в сосуде с уплотнением и компенсатором радиальных Δr и осевых Δа биений вала сосуда (сосуд), содержащем неподвижный корпус сосуда, вал сосуда, опоры движения вала сосуда, уплотнение вала сосуда, содержащее корпус уплотнения, вал уплотнения и опоры движения вала уплотнения относительно корпуса уплотнения и компенсатор радиальных и осевых биений вала сосуда (компенсатор), вал уплотнения и компенсатор выполнены полыми, охватывающими вал сосуда, при этом корпус сосуда и корпус уплотнения, а также вал сосуда и вал уплотнения герметично, с помощью уплотнительных элементов, сопряжены между собой, и, по крайней мере, одно из указанных соединений сопряжено между собой подвижно через две крайних поверхности сопряжения компенсатора, при этом компенсатор выполнен из n=1, 2, 3 … частей, n-1 части которых герметично и подвижно сопряженных между собой через указанные уплотнительные элементы, компенсатор и две указанных подвижных поверхностей сопряжения содержит k=n+1 пар подвижных друг относительно друга поверхностей сопряжений (пар), при этом указанные поверхности пар выполнены в виде поверхностей вращения и/или плоскими, образующими кинематические пары [Кожевников С.Н., Есипенко Я.И., Раскин Я.М. Механизмы. Справочник. - М.: Машиностроение, 1976. - 784 с. (с. 18-36, с. 53-74)], с.53-74)], имеющими максимально допустимые кинематические подвижности пар для данной конструкции и геометрии сосуда: вращательные θti mах и/или поступательные -  и/или плоские - θfi mах и/или сферические - θsi mах, где 1≤i≤k, в пределах указанных максимально допустимых кинематических подвижностей пар возможны радиальные rk и осевые аk перемещения вала сосуда, при этом поверхности сопряжений каждой пары расположены друг относительно друга с зазорами 0≤δmi≤δmi mах, где δmi mах - максимально допустимые зазоры между поверхностями сопряжения для указанных уплотнительных элементов, обеспечивающими возможность дополнительных подвижностей пар и образуют максимально допустимые подвижности пар за счет изменения зазора - вращательные - θGtimax и/или поступательные -
и/или плоские - θfi mах и/или сферические - θsi mах, где 1≤i≤k, в пределах указанных максимально допустимых кинематических подвижностей пар возможны радиальные rk и осевые аk перемещения вала сосуда, при этом поверхности сопряжений каждой пары расположены друг относительно друга с зазорами 0≤δmi≤δmi mах, где δmi mах - максимально допустимые зазоры между поверхностями сопряжения для указанных уплотнительных элементов, обеспечивающими возможность дополнительных подвижностей пар и образуют максимально допустимые подвижности пар за счет изменения зазора - вращательные - θGtimax и/или поступательные -  и/или плоские - θGfimax и/или сферические - θGsimax, в пределах которых возможны дополнительные радиальные rG и осевые aG перемещения вала сосуда, при этом в пределах указанных кинематических и дополнительных подвижностей пар суммарные радиальные и осевые перемещения вала сосуда обеспечивают выполнение условий
и/или плоские - θGfimax и/или сферические - θGsimax, в пределах которых возможны дополнительные радиальные rG и осевые aG перемещения вала сосуда, при этом в пределах указанных кинематических и дополнительных подвижностей пар суммарные радиальные и осевые перемещения вала сосуда обеспечивают выполнение условий

и

Возможны варианты расположения герметичных неподвижных и подвижных сопряжений компенсатора между валом сосуда и валом уплотнения и между корпусом сосуда и корпусом уплотнения или одновременного использования подвижных сопряжений между указанными валами и корпусами. Компенсатор может быть расположен снизу и сверху, внутри и снаружи от МЖУ. Во всех вариантах поверхности сопряжения выполнены в виде поверхностей вращения и/или плоскими, то есть быть, например, сферическими, коническими, цилиндрическими, тороидальными и другими, определяемыми видом образующих и/или плоскими с любым сочетанием их сопряжений. Например, пары сопряжения могут быть образованы поверхностями сфера - сфера или сфера - цилиндр или плоскость - плоскость или плоскость - тороид или цилиндр - цилиндр и т.д. Численные значения в виде возможных углов поворота, радиального и осевого смещений зависят от вида сопрягаемых поверхностей в парах и от конструктивных особенностей сосуда. Выбор вида поверхностей пар зависит от параметров и геометрии сосуда и уровня допускаемых радиальных и осевых биений вала сосуда.
Сущность изобретения поясняется чертежами, где показаны.
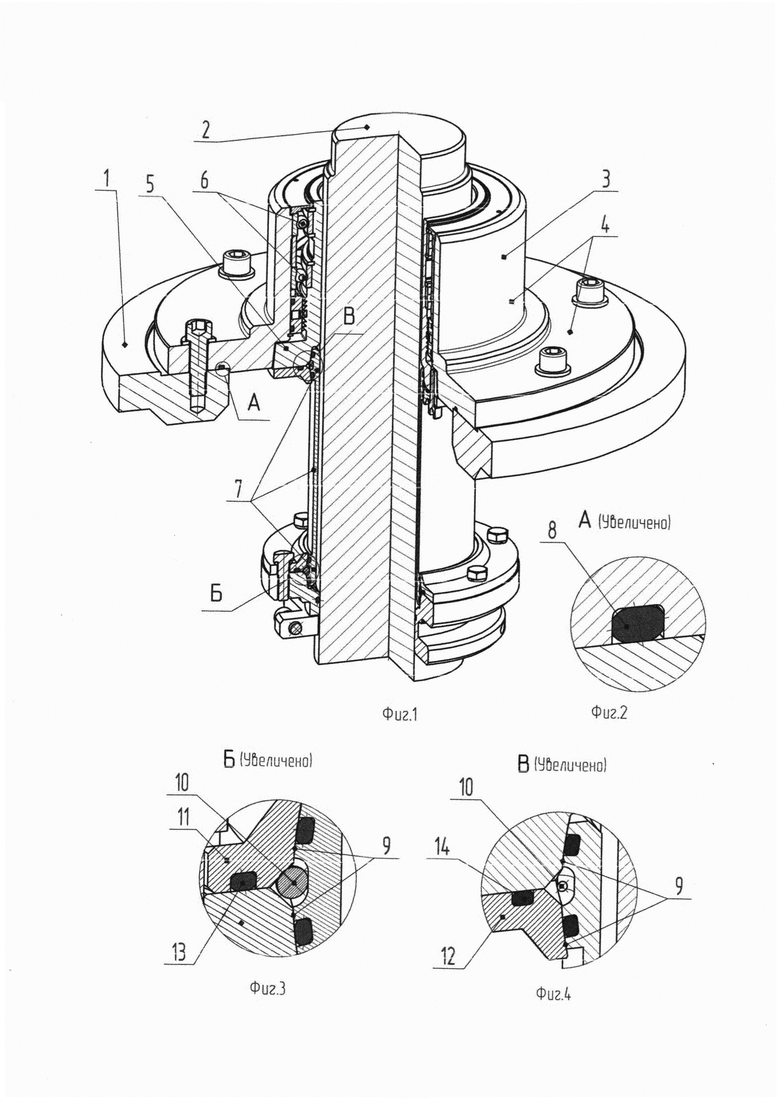
На фиг. 1 - продольный разрез сосуда в области МЖУ и компенсатора, установленного между валом сосуда и валом уплотнения снизу от МЖУ.
На фиг. 2, 3, 4 - увеличенные изображения конструкции по фиг. 1 в местах расположения уплотнительных элементов. На фиг. 2 вариант неподвижного и герметичного соединения корпуса сосуда с корпусом МЖУ через компенсатор. На фиг. 3, 4 вариант герметичных и подвижных соединений компенсатора с валом сосуда и валом уплотнения.
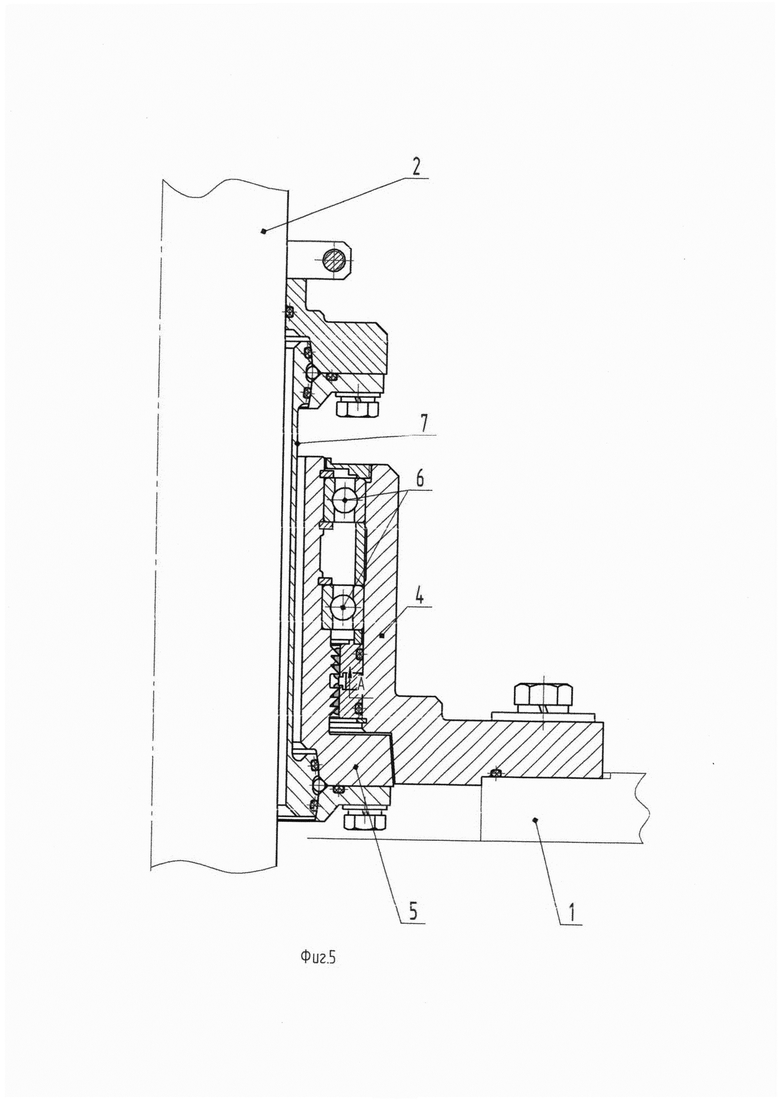
На фиг. 5 - продольный разрез сосуда в области установки МЖУ и компенсатора, установленного между валом сосуда и валом МЖУ внутри МЖУ.
На фиг. 6 изображен продольный разрез сосуда в области МЖУ и компенсатора, установленного между корпусом сосуда и корпусом МЖУ снаружи МЖУ.
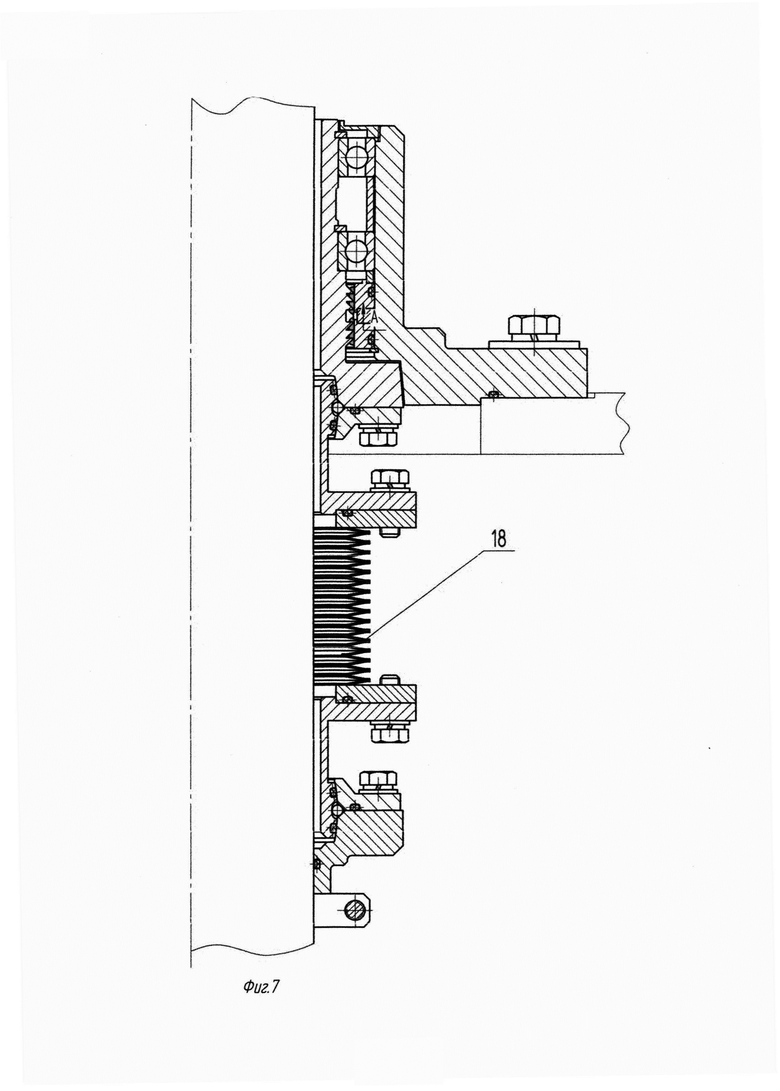
На фиг. 7 изображен продольный разрез сосуда в области установки МЖУ и компенсатора с сильфоном.
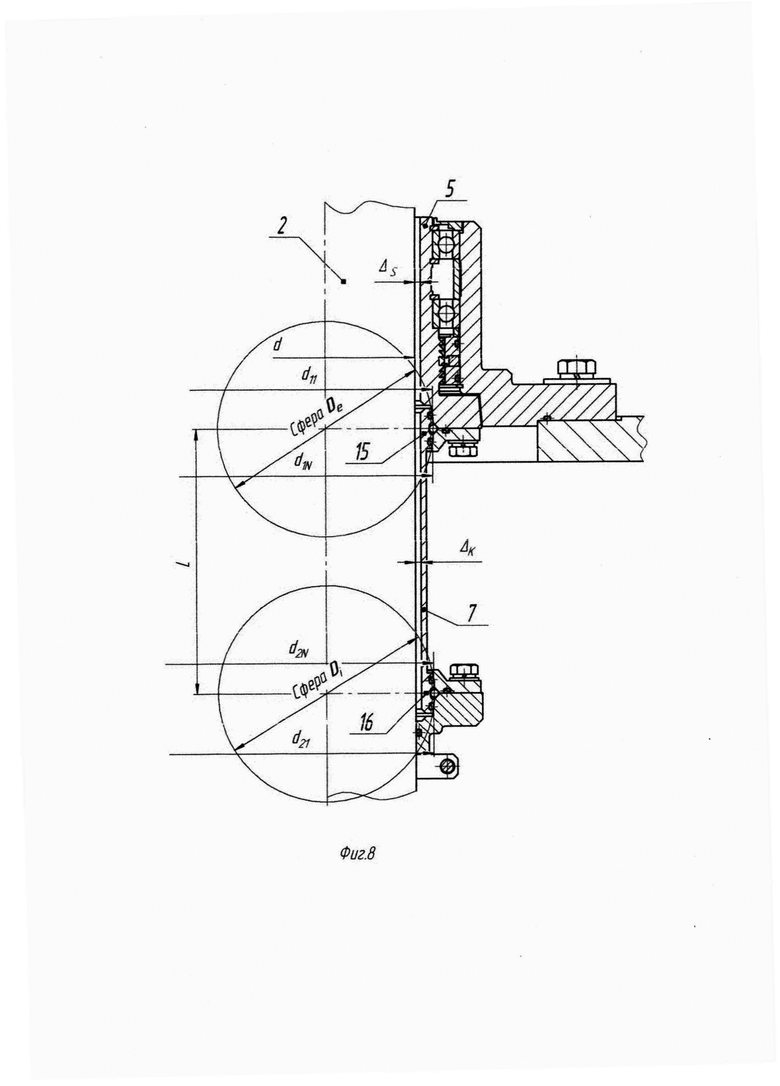
На фиг. 8 изображен продольный разрез сосуда в области МЖУ и компенсатора со сферическими парами и обозначения основных размеров.
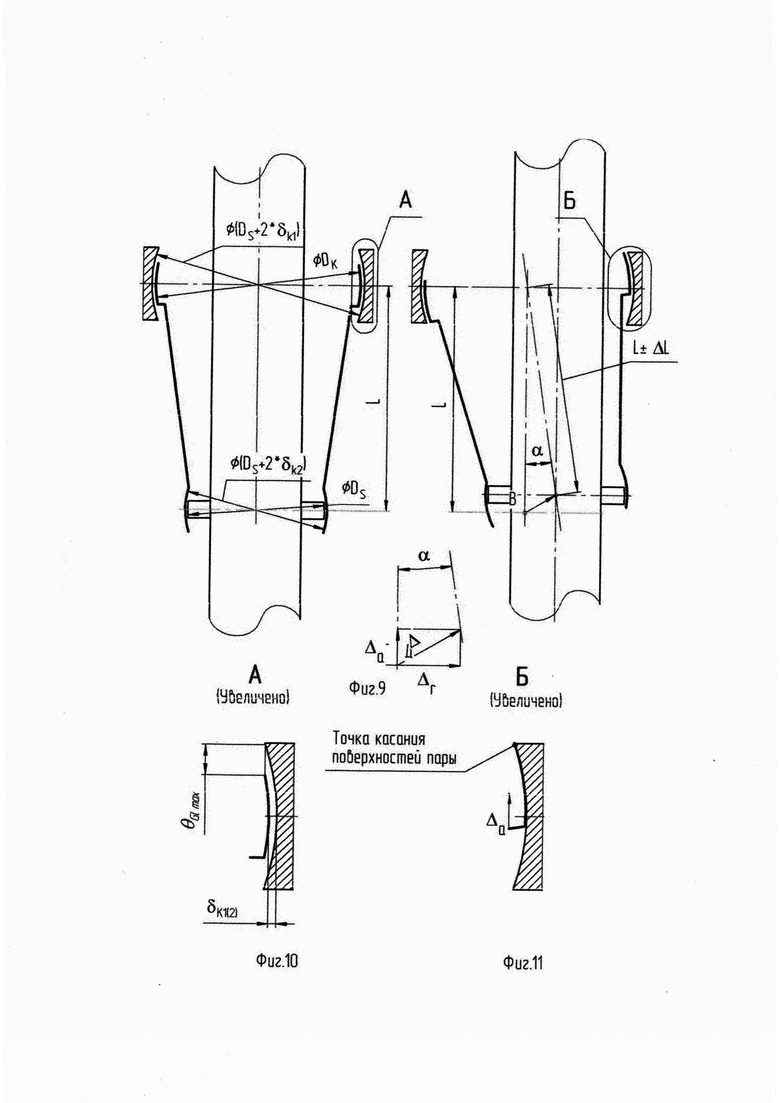
На фиг. 9 изображена схема сосуда по фиг. 8 с положением компенсатора в исходном положении и в положении и в смещенном положении вала сосуда.
На фиг. 10 и 11 положение пары, с зазором между поверхностями сопряжения сфера-сфера в исходном положении и возможные радиальные или осевые перемещения вала сосуда за счет выборки зазора.
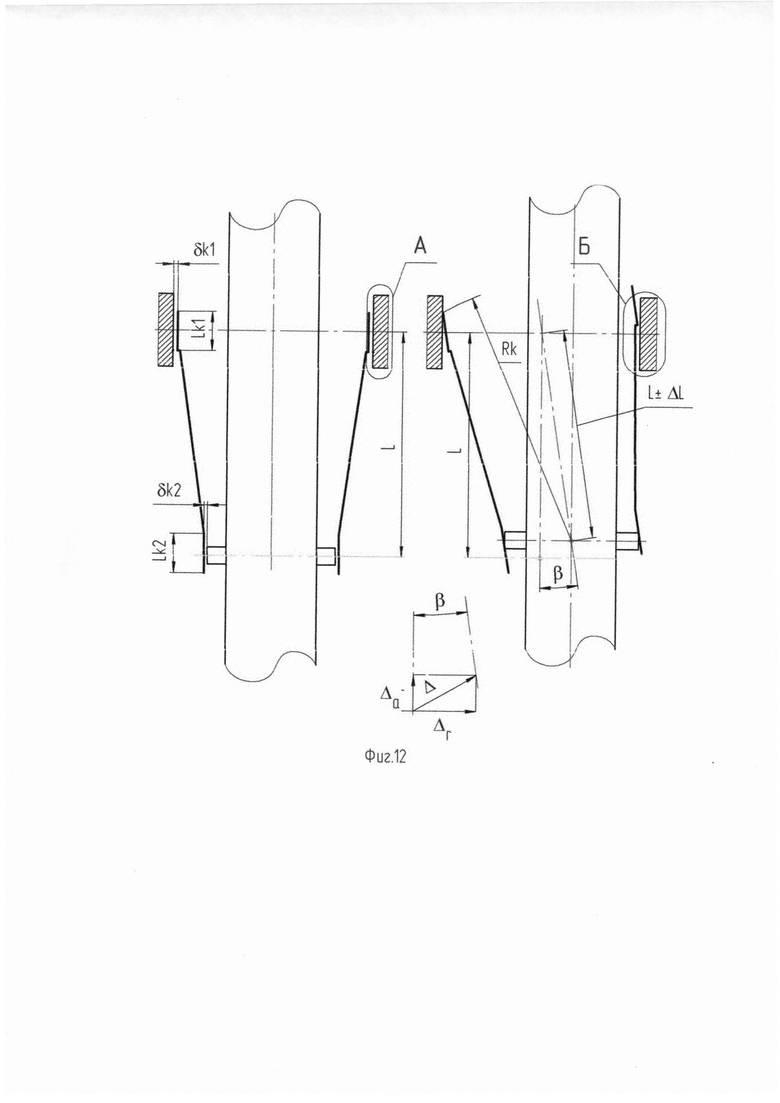
На фиг. 12 представлена схема расположения поверхностей сопряжения по поверхностям вращения цилиндр-цилиндр в нейтральном положении и при перемещении вала сосуда за счет выборки зазора.
На фиг. 1 представлен сосуд с уплотнением и компенсатором Δr и осевых Δа биений вала сосуда, расположенным между валом сосуда и валом уплотнения. Сосуд состоит из неподвижного корпуса сосуда 1, вала сосуда 2 и опор движения вала сосуда (не показаны). Как правило, давление внутри сосуда отличается от атмосферного или (при их равенстве) требуется отделение объема сосуда от атмосферы по технологическим соображениям или по условиям безопасности. Это приводит к необходимости установки уплотнения, в качестве которого могут быть использованы известные уплотнения, например, лабиринтные, торцевые, магнитожидкостные (МЖУ) и другие. В данном случае принято МЖУ, позволяющее наиболее полно реализовать свои положительные качества: абсолютную герметичность, малые момент трения и потери и отсутствие износа твердых тел при трении. МЖУ 3 содержит корпус МЖУ 4, вал МЖУ 5 и опоры движения (подшипники) вала МЖУ 6. Введение компенсатора 7 обеспечивает бОльшие допустимые радиальные и осевые биения вала сосуда при отсутствии соударений вала сосуда и вала МЖУ. Вал МЖУ и компенсатор выполнены полыми в виде тел вращения, охватывающими вал сосуда.
Уплотнение неподвижного соединения корпуса сосуда и корпуса МЖУ (см. фиг. 2) обеспечивается известными уплотнительными средствами: металлическими, пластмассовыми, резиновыми прокладками и уплотнительными кольцами различного сечения. В указанном варианте показано уплотнение резиновым кольцом круглого сечения 8.
Компенсатор 7 по фиг. 1 герметично и подвижно связывает между собой вал сосуда и вал МЖУ. Подвижность их соединения обеспечивается сопряжением по сферическим 9 (см. фиг. 3, 4) поверхностям. При этом сферические сопряжения обеспечивают взаимный поворот за счет кинематической подвижности сфера-сфера в радиальных и тангенциальных плоскостях и дополнительные подвижности в радиальном и осевом направлениях в пределах зазора между ними. Некоторые из указанных подвижностей, например, взаимное вращение в тангенциальном направлении могут быть исключены путем фиксации, например, с помощью муфты со сферическими вкладышами 10. В пределах указанных кинематических и дополнительных подвижностей пар суммарные радиальные и осевые перемещения вала сосуда обеспечивают выполнение условий (1) и (2).
Компенсатор по фиг. 1 состоит из одной части n=1 и сопряжен по двум парам сфера-сфера с валом сосуда и валом МЖУ.
Для удобства сборки сферические поверхности могут быть выполнены составными, например, с накладными фланцами 11 и 12. Стыки фланцев и элементов валов должны быть уплотнены указанными выше средствами, в данном случае, кольцами 13 и 14.
На фиг. 1 места сопряжения пар находятся внутри сосуда, что позволяет уменьшить габариты сосуда в целом. Вместе с тем, указанные сочленения подвержены действию продукта внутри сосуда, что требует дополнительных мер их защиты.
На фиг. 5 вал сосуда 2 герметично и подвижно сопряжен с валом МЖУ 5, через компенсатор 7. Корпус 4 МЖУ через подшипники 6 центрирует вал МЖУ и неподвижно и герметично сопряжен с корпусом сосуда 1. В отличие от фиг. 1 компенсатор распложен внутри и сверху от МЖУ, что позволяет при несложной защите от продукта (не показано) существенно уменьшить или исключить попадание указанного продукта в сопряжение пары компенсатора в его нижней части. Расположение верхней пары компенсатора над МЖУ упрощает монтаж МЖУ и компенсатора. Вместе с тем, расположение компенсатора внутри МЖУ увеличивает радиальные размеры отверстия вала МЖУ на толщину компенсатора и зазор между компенсатором и валом МЖУ, что неизбежно приведет к увеличению наружных габаритов МЖУ и его массы.
На фиг. 6 радиальные и осевые биения вала сосуда 2 через вал МЖУ 5, подшипники МЖУ 6 и корпус МЖУ 4 устраняются компенсатором 7 и не передаются на корпус сосуда 1. В данном варианте компенсатор состоит из двух частей 15 и 16, т.е. n=2 с тремя парами: две сфера-сфера 8 и цилиндр-цилиндр 11, обеспечивающими герметичные кинематические подвижности для сфера-сфера, указанные выше, и поступательную для пары цилиндр-цилиндр. При выполнении указанных пар с зазором образуются дополнительные подвижности: радиальная и осевая для сфера- сфера и поворот в радиальных плоскостях и радиальные перемещения для пары цилиндр-цилиндр, обеспечивающие в совокупности с кинематическими подвижностями выполнение условий (1) и (2).
Для исключения (уменьшения) действия масс корпуса МЖУ и компенсатора на подшипники МЖУ в сосуд может быть встроена пружина 17.
Данный вариант исполнения позволяет вынести компенсатор из внутренней зоны сосуда, тем самым исключив попадание продукта в подвижные сопряжения компенсатора. Вместе с тем увеличиваются габариты и масса компенсатора.
На фиг. 7 представлен вариант исполнения компенсатора по фиг. 1 с уменьшенной осевой жесткостью, например, путем введения сильфона 18. При n=1 компенсатор обеспечивает выполнение условия (1) и (2) за счет кинематических и дополнительных подвижностей пар и за счет упругой деформации сильфона.
Одновременное использование приведенных вариантов установки компенсаторов при соединении вала сосуда и вала МЖУ и при соединении корпуса сосуда и корпуса МЖУ (не показано) позволяет уменьшить осевые габариты компенсатора, но усложняет конструкцию уплотнительного узла и компенсатора.
На продольном разрезе компенсатора, сопряженного с валами сосуда и МЖУ (см. фиг. 8), представлены размеры, определяющие его геометрию. Вал сосуда 2 диаметром d находится в нейтральном положении без радиального и осевого смещений. Расположение компенсатора 7 между валом сосуда и валом МЖУ 5 предопределяет необходимость наличия радиальных зазоров между валом сосуда и, соответственно, внутренним диаметром вала МЖУ ΔS ≥ Δr и между валом сосуда и внутренним диаметром компенсатора Δk ≥ Δr. Последний может быть переменным, увеличиваясь от места сопряжения с валом сосуда 19 к месту сопряжения с валом МЖУ 20. Выполнение этих условий предотвращает касания и удары вала сосуда о МЖУ и компенсатор, но требует выполнения внутреннего диаметра вала МЖУ и внутреннего диаметра компенсатора, по крайней мере, в области пары 15 не менее
В данном случае пары сопряжений 19 и 20 сферические, обеспечивающие указанные выше подвижности. Диаметры сфер в общем случае не равны друг другу. Расстояние между их центрами - L. Диаметры d11, d1N, d21, d2N - диаметры расположения уплотнительных элементов, определяющих допустимые зазоры между поверхностями сопряжений пар.
Поверхности сопряжения пар на компенсаторе могут быть расположены снаружи или внутри и сверху или снизу относительно МЖУ. Например, на фиг. 9 поверхность компенсатора пары вал сосуда - компенсатор располагается снаружи пары, а у пары вал МЖУ - компенсатор внутри. Образующая компенсатора между парами сопряжений может отличаться от цилиндрической и быть, например, конической, обеспечивая параллельность его образующей оси вала сосуда, в плоскости максимального радиального смещения вала сосуда. Очевидно, в этом случае при заданном межосевом расстоянии между центрами пар (центрами сопряжений) длина компенсатора будет минимальной.
С практической точки зрения наиболее целесообразно для компенсации биений вала сосуда использовать кинематические подвижности, например, как показано на фиг. 6, 9, где для компенсации радиальных биений - выбраны пары сферических поверхностей, образующих сферические кинематические подвижности, а для компенсации осевых биений пары - пара цилиндр-цилиндр, образующие поступательную подвижность. В этом случае указанные пары могут работать без изменения зазора между поверхностями пар. Для удовлетворения изложенного сферические пары должны вращаться друг относительно друга относительно их общих центров, лежащих на расстоянии L друг от друга. В этом случае при радиальном сдвиге Δr вала сосуда (см. фиг. 9) должно выполняться условие (без учета изменения расстояния между их центрами)

где α - допустимый угол поворота поверхностей пар друг относительно друга в радиальной плоскости, определяемый конструктивными параметрами сочленяемых поверхностей. Например, для сферических пар угол поворота в радиальных плоскостях может достигать 5O (величина определяется диаметрами расположения уплотнительных элементов d11, d1N, d21, d2N и ограничивается динамическими нагрузками в сферических парах и может быть повышен при низких оборотах вала сосуда). В этом случае расстояние L в соответствии с (3) должно быть L ≥ 11,5Δr, что, например, при Δr=5 мм потребует выполнения условия L ≥ 57,5 мм.
Вместе с тем наряду с использованием кинематических подвижностей сфер могут быть использованы дополнительные подвижности за счет изменения зазоров между сферами. Перемещение поверхностей пар друг относительно друга в радиальной плоскости происходит между двумя предельными направлениями: перемещением в радиальном и осевом направлениях в пределах двух зазоров между двумя парами до касания двух поверхностей пар. Очевидно, предельное перемещение двух пар компенсатора в радиальном направлении равно (δk+δs) (см. фиг. 11) а в осевом - θGl max. (см. фиг. 10). Отсюда для конструкции по фиг. 9 возможны два предельных варианта компенсации радиального и осевого биений вала сосуда. При радиальной выборке зазоров δk1(2) (см. фиг. 10) пределы радиального и осевого смещений

а при осевой выборке зазора пределы радиального и осевого смещений

Очевидно, что возможно одновременное перемещение по осевой и радиальной выборке зазора с учетом выполнения условий (4) и (5). При этом зазор между парами может выбираться полностью или частично, оставляя запас перемещения.
На схеме фиг. 12 пары сопряжения выполнены в виде поверхностей вращения цилиндр-цилиндр с радиальными зазорами между ними δk1 и δk2, определяемыми условиями сохранения герметичности уплотнительных элементов (не показано) между поверхностями пар. Осевое биение вала сосуда компенсируется за счет кинематических подвижностей пар, в совокупности обеспечивающих выполнение условия (2) при aG=0. При радиальном смещении вала сосуда в пределах

происходит радиальная выборка зазоров. Далее происходит поворот компенсатора в пределах указанных зазоров. Закон движения компенсатора при его повороте достаточно сложен и должен учитывать совокупность действующих на компенсатор через уплотнительные элементы сил и моментов, геометрические размеры компенсатора и поверхностей пар. В конечном итоге компенсатор повернется на угол

где RSR - средний радиус поворота торцевых краев компенсатора относительно центра его поворота. В этом случае минимальная длина компенсатора должна удовлетворять условию

В соответствии с (7) для дополнительных подвижностей в пределах зазоров цилиндрических пар угол их поворота относительно друг друга составляет

В этом случае расстояние между центрами цилиндрических поверхностей пар в соответствии с (8) должно быть

что при Δr=5 мм требует L ≥ 860 мм.
Поэтому длина компенсатора, а, следовательно, и его габариты при использовании кинематической сферической подвижности (см. 3а) более чем на порядок меньше, чем при использовании дополнительных подвижностей за счет зазоров в цилиндрических парах (см. 8а).
Таким образом, для всего множества пар, определяемых указанными поверхностями вращения и/или плоскими поверхностями, могут быть образованы пары с кинематическими подвижности и/или пары с подвижностями за счет выборки зазора между поверхностями пар. Выбор пары определяется конструкцией сосуда в зоне компенсатора, а также заданными уровнями радиальных и осевых биений вала сосуда. Очевидно, при высоком уровне заданных радиальных и осевых биениях вала сосуда выбор пар, обеспечивающих кинематические подвижности предпочтительнее, чем пар с подвижностями за счет выборки зазора. При небольших уровнях указанных биений условия (1) и (2) могут быть выполнены за счет совокупности кинематических и дополнительных подвижностей пар или исключительно за счет дополнительных подвижностей за счет выборки зазоров.
Например, при незначительных радиальных биениях вала сосуда и при значительных осевых его биениях может быть выбрана конструкция компенсатора по фиг. 12 с цилиндрическими парами. Они проще в изготовлении, чем, например, сферические пары и соответственно, дешевле и при небольших радиальных биениях вала сосуда цилиндрическая форма пар может быть предпочтительной. В любом случае должны выполняться условия (1) и (2).
Компенсатор может состоять из нескольких частей, как показано на фиг. 6. Это позволяет компенсировать радиальные и осевые биения вала сосуда практически за счет кинематических подвижностей.
Следует отметить, что элементы уплотнения поверхностей пар компенсатора при совершении компенсирующих движений работают в режиме уплотнения неподвижного типа, а их относительные движения друг относительно друга относятся к периодическим перемещениям пар при компенсации биений, вибрации и т.п. В качестве примера рассмотрим пару плоская поверхность - плоская поверхность перпендикулярные оси вращения. При расположении уплотнительного элемента этой пары на диаметре 100 мм и при числе оборотов вала сосуда 1000 об/мин относительно второй плоской неподвижной поверхности пары окружная скорость движения точки на подвижной плоскости будет равна - 5,23 м/с (аналогично это скорость относительного движения поверхностей торцевого уплотнения на данном диаметре). Если указанные плоские поверхности пары расположены на компенсаторе и на одном из валов (сосуда или уплотнения) они вращаются синхронно, а их движение друг относительно друга определяется заданным радиальным биением. При величине радиального биения вала сосуда Δr=5 мм при указанной геометрии и параметрах радиальная скорость относительного движения поверхностей пары за один оборот вала сосуда - 0.0055 м/с, т.е. более чем на три порядка меньше, чем приведенная выше. Осевая и тангенциальная составляющие скорости при этом равны нулю.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТОЖИДКОСТНОЕ УПЛОТНЕНИЕ | 2017 |
|
RU2666685C1 |
| МАГНИТОЖИДКОСТНОЕ УПЛОТНЕНИЕ | 2016 |
|
RU2659305C2 |
| МАГНИТОЖИДКОСТНОЕ УПЛОТНЕНИЕ | 2001 |
|
RU2205309C2 |
| УПЛОТНИТЕЛЬНОЕ УСТРОЙСТВО | 1997 |
|
RU2120073C1 |
| ТОРЦЕВОЕ УПЛОТНЕНИЕ СИСТЕМЫ КУЗЬМИНА С.А. | 1997 |
|
RU2118730C1 |
| МАГНИТОЖИДКОСТНОЕ УПЛОТНЕНИЕ ВАЛА | 2014 |
|
RU2563562C1 |
| РУСЛОВОЙ ГИДРОАГРЕГАТ | 2000 |
|
RU2187691C2 |
| ТОРЦЕВОЕ УПЛОТНЕНИЕ ВАЛА | 1993 |
|
RU2062930C1 |
| Устройство для герметизации сосудов с фланцами | 1988 |
|
SU1615588A1 |
| Магнитожидкостное уплотнение | 1991 |
|
SU1800181A1 |
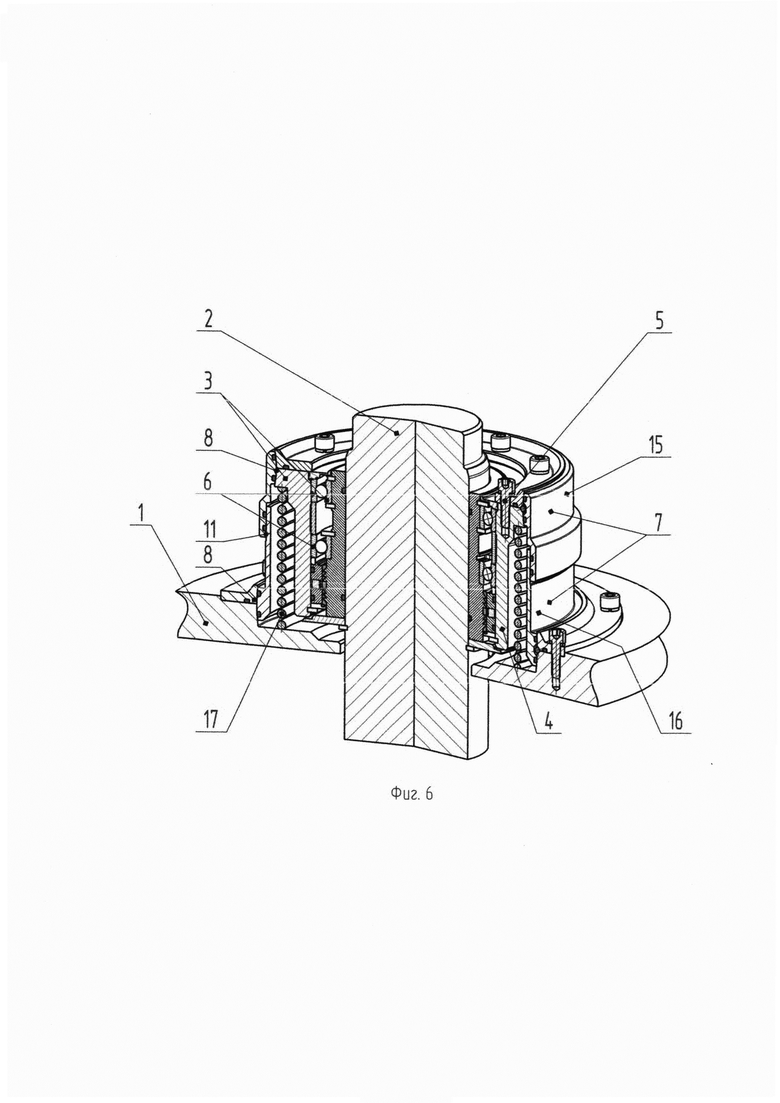
Изобретение относится к сосудам с уплотнением и компенсатором радиальных Δr и осевых Δа биений вала сосуда. Сосуд состоит из неподвижного корпуса 1 сосуда, вала 2 сосуда и опор движения вала сосуда. Вал 2 сосуда герметично и неподвижно соединен с валом уплотнения 5, в данном случае магнитожидкостного уплотнения (МЖУ), а радиальные и осевые биения вала сосуда через подшипники 6 МЖУ и корпус 4 МЖУ устраняются компенсатором 7 и не передаются на корпус 1. Компенсатор состоит из двух частей 15 и 16, с n=2 и с k=n+1=3 тремя парами поверхностей сопряжений: две сфера-сфера 8 и цилиндр-цилиндр 11, обеспечивающих кинематические подвижности для сфера-сфера за счет поворота поверхностей пар в радиальной плоскости и поступательную для пары цилиндр-цилиндр. При выполнении указанных пар с зазором образуются дополнительные подвижности в пределах зазоров: радиальная и осевая для пар сфера-сфера и поворот в радиальной плоскости и радиальное перемещение для цилиндр-цилиндр. Технический результат, достигаемый данным изобретением, заключается в уменьшении габаритов компенсатора, особенно вдоль его оси вращения при существенном увеличении компенсируемых радиальных и осевых биений вала сосуда. 12 ил.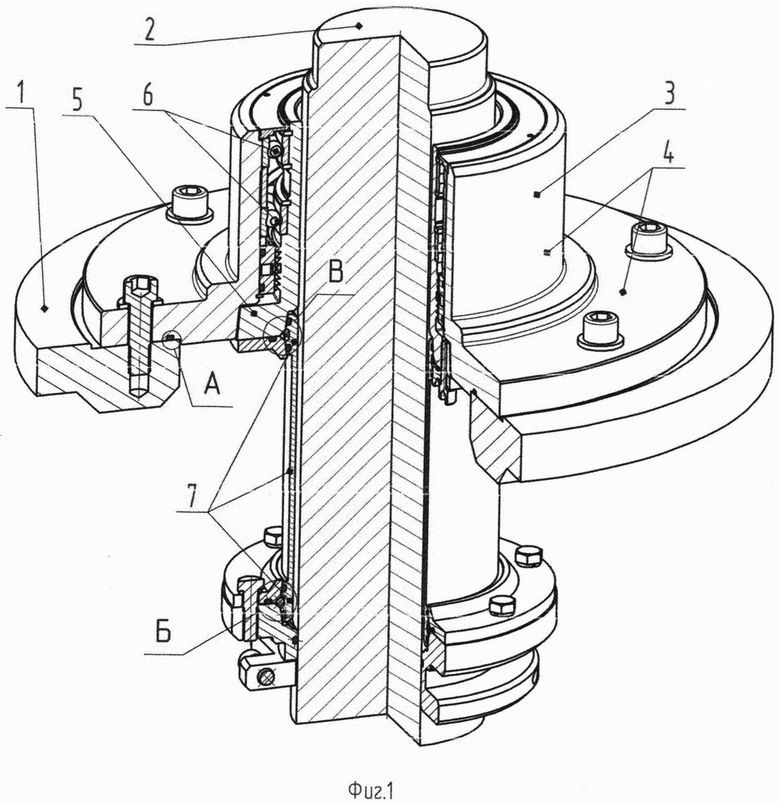
Сосуд с уплотнением и компенсатором радиальных Δr и осевых Δа биений вала сосуда, содержащий неподвижный корпус сосуда, вал сосуда, опоры движения вала сосуда, уплотнение вала сосуда, содержащее корпус уплотнения, вал уплотнения и опоры движения вала уплотнения и компенсатор радиальных и осевых биений вала сосуда, вал уплотнения и компенсатор выполнены полыми, охватывающими вал сосуда, при этом корпус сосуда и корпус уплотнения, а также вал сосуда и вал уплотнения герметично, с помощью уплотнительных элементов, сопряжены между собой, и, по крайней мере, одно из указанных соединений сопряжено между собой подвижно через две крайних поверхности сопряжения компенсатора, отличающийся тем, что компенсатор выполнен из n=1, 2, 3 … частей, n-1 части которых герметично и подвижно сопряжены между собой через указанные уплотнительные элементы, компенсатор и две указанные подвижные поверхности сопряжения содержат k=n+1 пар подвижных относительно друг друга поверхностей сопряжений, при этом указанные поверхности пар выполнены в виде поверхностей вращения и/или плоскими, образующими кинематические пары, имеющие максимально допустимые кинематические подвижности пар для данной конструкции и геометрии сосуда: вращательные θti max, и/или поступательные -  , и/или плоские - θfimах, и/или сферические - θsi mах, где i=1,…k, в пределах указанных максимально допустимых кинематических подвижностей пар возможны радиальные rk и осевые аk перемещения вала сосуда, при этом поверхности сопряжений каждой пары расположены относительно друг друга с зазорами 0≤δmi≤δmi mах, где δmi mах - максимально допустимые зазоры между парами для указанных уплотнительных элементов, обеспечивающими возможность дополнительных подвижностей пар и образуют максимально допустимые подвижности пар за счет изменения зазора - вращательные - θGti mах, и/или поступательные -
, и/или плоские - θfimах, и/или сферические - θsi mах, где i=1,…k, в пределах указанных максимально допустимых кинематических подвижностей пар возможны радиальные rk и осевые аk перемещения вала сосуда, при этом поверхности сопряжений каждой пары расположены относительно друг друга с зазорами 0≤δmi≤δmi mах, где δmi mах - максимально допустимые зазоры между парами для указанных уплотнительных элементов, обеспечивающими возможность дополнительных подвижностей пар и образуют максимально допустимые подвижности пар за счет изменения зазора - вращательные - θGti mах, и/или поступательные -  , и/или плоские - θGfimax, и/или сферические - θGsimax, в пределах которых возможны дополнительные радиальные rG и осевые aG перемещения вала, при этом в пределах указанных кинематических и дополнительных подвижностей пар суммарные радиальные, и осевые перемещения вала сосуда обеспечивают выполнение условий rs=(rk+rG)≥Δr и as=(аk+aG)≥Δа.
, и/или плоские - θGfimax, и/или сферические - θGsimax, в пределах которых возможны дополнительные радиальные rG и осевые aG перемещения вала, при этом в пределах указанных кинематических и дополнительных подвижностей пар суммарные радиальные, и осевые перемещения вала сосуда обеспечивают выполнение условий rs=(rk+rG)≥Δr и as=(аk+aG)≥Δа.
| Магнитожидкостное уплотнение | 1984 |
|
SU1227884A1 |
| Магнитожидкостное уплотнение | 1984 |
|
SU1227885A1 |
| Магнитно-жидкостное уплотнение | 1980 |
|
SU892075A1 |
| Магнитожидкостное уплотнение вала | 1983 |
|
SU1095002A1 |

