Изобретение относится к области строительства, а именно к устройствам для выравнивания положения сооружений при неравномерных оседаниях основания.
Известны устройства для выравнивания сооружений, содержащие выполненные под подошвой фундамента домкратные ниши с установленной в них системой домкратов, обеспечивающих корректировку положения сооружения, с последующим удалением домкратов и заполнением образовавшихся зазоров распорками, бетоном, или цементным раствором /см., например, патент РФ на изобретение №2333322, кл. Е02D 35/00, 2006 [1]; патент РФ на изобретение №2211896, кл. Е02D 35/00, 2003 [2]/.
Недостатками известных устройств является предельная сложность конструкций и реализации процесса выравнивания, невозможность автоматического адаптивного саморегулирования сооружений в процессе их эксплуатации.
Известны более простые конструкции устройств, предусматривающие корректировку положения сооружений при неравномерных оседаниях основания с помощью сыпучего материала, выпускаемого из специальных отверстий в емкости либо под действием давления, создаваемого поршнем, /см., например, а.с. СССР №628234, кл. Е02D 27/34, 1976 [3]; а.с. СССР №697643, кл. Е02D 27/34, 1976 [4]; Никонов И.Н. Искусственные сооружения [5] /, либо с помощью специальных гидравлических механизмов открывания перкрываюших наклонные сквозные каналы заслонок /см., например, патент Японии №46-15892, кл. 86А02, опублик. 1971 [6]; а.с. СССР №600253, кл. Е02D 27/34, 1975 [7]/.
Недостатками известных устройств является сравнительная сложность конструкций, невозможность автоматического адаптивного саморегулирования сооружений.
Также известны устройства с возможностью осуществления корректировки положения сооружения непосредственно в процессе эксплуатации путем автоматического перераспределения положения сыпучего материала /см., например, а.с. СССР №945287, кл. Е02D 27/34, 1980 [8]; а.с. СССР №1183612, кл. Е02D 27/34, 1983 [9]/.
Недостатками известных устройств являются специфические условия применения : необходимость использования дополнительного сложного оборудования /свайный элемент в набухающем грунте [8], компенсаторы, заслонки с механизмом их открывания в виде маятника с гибкими тягами [9]/ и т.п.
Наиболее близким устройством того же назначения к заявляемому изобретению по совокупности существенных признаков является устройство для защиты зданий и сооружений от неравномерных оседаний оснований, содержащее металлический шарнирный ромб, соединенный своими верхним и нижним шарнирами, соответственно, с фундаментной балкой и фундаментной плитой, и горизонтальную тягу, соединяющую вершины горизонтальных узлов ромба и выполненную в виде упругого элемента, например, пружины переменной жесткости /см. а.с. СССР №346446, кл. Е02D 27/34, 1969 [10]/, и принятое за прототип.
Недостатками устройства-прототипа является низкая эффективность и, более того, практическая невозможность позитивной корректировки положения сооружений при неравномерных осадках основания, а также принципиальная сложность и низкая технологичностьконструкции устройства. Эти недостатки объясняются направленностью известной конструкции не на корректировку положения сооружения, а на /см. [10], описание по заявке/ обеспечение постоянного "отпора под объектом" на неравномерно сжимаемых грунтах, то есть на постоянство и равенство нормального давления N силе P в верхнем узле ромба N=P на всем интервале вертикальных перемещений, а также предельной конструктивной и технологической сложностью изготовления нелинейной пружины с с заданной переменной жесткостью во всем диапазоне ее горизонтальных перемещений и при зависимости характера ее нелинейной характеристики от длины стороны ромба и величин его углов.
Сущность изобретения заключается в создании простого и предельно эффективного устройства для адаптивной автоматической коррекции положения сооружений при неравномерных оседаниях основания непосредственно в процессе эксплуатации путем решения оригинальных задач движения кинематических шарнирных механизмов.
Технический результат-увеличение эффективности работы устройства и точности процесса корректировки, упрощение конструкции устройства и повышение его технологичности.
Указанный технический результат при осуществлении изобретения достигается тем, что в известном устройстве для корректировки положения сооружений при неравномерных оседаниях основания, включающем металлический шарнирный ромб, соединенный своими верхним и нижним шарнирами, соответственно, с сооружением и основанием, особенность заключается в том, что боковые шарниры ромба свободно оперты на прикрепленную к сооружению направляющую опорную поверхность в форме части вогнутого цилиндра с радиусом, равным стороне ромба, при этом нижняя половина ромба размещена в параллельной его плоскости сквозной прорези в середине направляющей опорной поверхности, а контактирующие элементы боковых шарниров ромба с краевыми частями направляющей опорной поверхности выполнены в виде полуосей, выступающих с обеих сторон вышеуказанных шарниров.
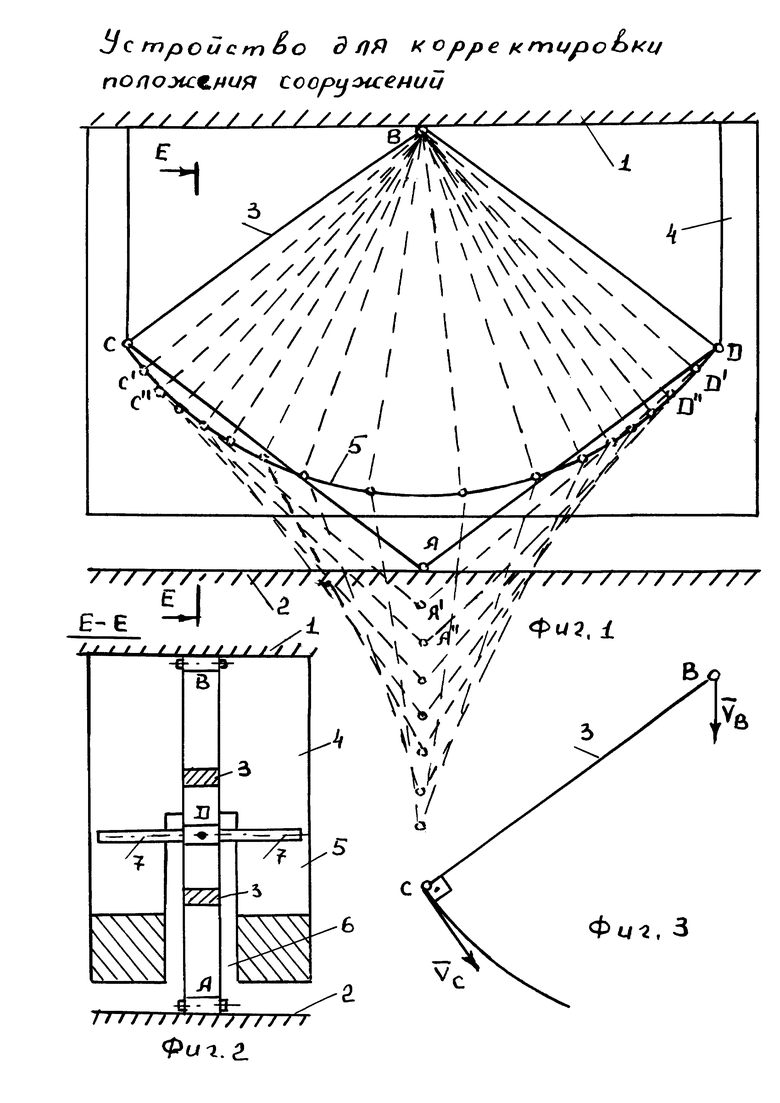
Предлагаемое устройство схематично поясняется чертежами, где на фиг. 1 показан общий вид устройства с кинематическим планом последовательных положений звеньев шарнирного механизма /пунктирными линиями/; на фиг. 2 - разрез по Е-Е на фиг. 1; на фиг. 3 - иллюстрация движения механизма на примере одного из его звеньев.
Устройство для корректировки положения сооружения 1 при неравномерных оседаниях основания 2 содержит металлический шарнирный ромб 3 АВСД, соединенный своим верхним В и нижним А шарнирами, соответственно, с сооружением 1 и основанием 2. При этом боковые шарниры С и Д ромба 3 свободно без их крепления оперты на прикрепленную к сооружению 1 с помощью специального кронштейна 4 направляющую опорную поверхность 5 в форме части вогнутого цилиндра с радиусом, равным стороне ромба 3. Ромб 3 установлен в плоскости, перпендикулярной продольной оси цилиндрической поверхности 5, при этом нижняя половина ромба 3 размещена в параллельной его плоскости сквозной прорези 6 в середине направляющей опрной поверхности 5 /прорезь 6, как видно из фиг. 1, необходима для опускания через нее нижних сторон АС и АД ромба 3 при движении вниз вместе с основанием 2 нижнего шарнира А ниже опорной поверхности 5 в пределах возможных при эксплуатации оседаний основания 2/. Из-за вышеуказанного опускания сторон АС и АД ромба 3 ниже направлявшей опорной поверхности 5 контактирующие элементы боковых шарниров С и Д ромба 3 с краевыми частями поверхности 5 выполнены в виде полуосей 7, выступающих с обеих сторон вышеуказанных шарниров С и Д.
Работа предлагаемого устройства осуществляется следующим обазом.
Исходное положение устройства и положение ромба 3 АВСД показано на рисунках сплошными линиями. При оседаниях основания 2 шарнир А ромба 3 последовательно вместе с основанием 2 перемещается вниз в положения A', Aʺ и т.д., шарниры С и Д при этом съезжают по направляющей опорной поверхности 5, соответственно, в точки С',Cʺ и Д'Дʺ… и т.д. /выступающие полуоси 7 шарниров С и Д, см. фиг. 2, скатываются по краям опорной поверхности 5, при этом стороны АС и АД ромба 3, см. фиг. 1 пунктиром, постепенно углубляются внутрь сквозной прорези 6 в середине данной поверхности 5/. При этом стороны СВ и ВД ромба 3 движутся по постоянным радиусам, равным длине стороны ромба 3, то есть вращаются вокруг неподвижного шарнира В, то есть шарнир 3 и соответственно сооружение 1 остается при любых оседаниях основания 2 неподвижным. Размещением, при необходимости, нескольких таких устройств по всей поверхности основания 2 /в случае его значительных размеров/ достигается адаптивная стабилизация по вертикали с любой необходимой точностью при любых неравномерных оседаниях основания 2. Очень важно, что такая стабилизация осуществляется абсолютно адаптивно без вмешательства рабочего персонала, без всяких промежуточных операций типа нагрева, размягчения плавких вставок, выпускания сыпучего материала, поддомкрачивания, заполнения образовавшихся при оседании зазоров различными материалами, установкой в них распорок и т.п. На фиг. 3 на примере одного из звеньев СВ ромба 3 теоретически показано, что точка В в любом положении звена СВ остается неподвижной. В общем случае звено СВ совершает плоско-параллельное движение /см., например, С.М. Тарг "Краткий курс теоретической механики", Изд. 9-е, Наука, М., 1974, стр. 184 [11]/. Вектор скорости точки С звена  направлен по касательной к опорной поверхности 5 вниз, причем
направлен по касательной к опорной поверхности 5 вниз, причем  СВ. Если бы сооружение 1 двигалось вместе вместе с опорой 2, то вектор
СВ. Если бы сооружение 1 двигалось вместе вместе с опорой 2, то вектор  был бы направлен вниз. Но по теореме о проекциях скоростей двух точек тела и на линию СВ должны быть равны /см. [11], стр. 184/, проекция на СВ равна 0, значит скорость =0, то есть сооружение 1 неподвижно.
был бы направлен вниз. Но по теореме о проекциях скоростей двух точек тела и на линию СВ должны быть равны /см. [11], стр. 184/, проекция на СВ равна 0, значит скорость =0, то есть сооружение 1 неподвижно.
По мнению заявителей, предлагаемое устройство характеризуется предельной точностью корректировки, абсолютно адаптивно, универсально и не зависит от типа, характера, веса и т.п. стабилизируемых в вертикальном направлении сооружений. При этом оно отличается чрезвычайной простотой конструкции, не требует изготовления упругих нелинейных элементов, нуждающихся в практически индивидуальном изготовлении и подгонки в соответствии с геометрическими параметрами кинематического механизма.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для корректировки положения сооружений | 2018 |
|
RU2704174C1 |
| Устройство для выравнивания положения сооружения | 2018 |
|
RU2704171C1 |
| Стенд для моделирования деформаций оснований зданий и сооружений | 1990 |
|
SU1777028A2 |
| Устройство для выравнивания неравномерных осадок сооружений | 2018 |
|
RU2705693C1 |
| Устройство для стабилизации положения сооружения на просадочном основании | 2018 |
|
RU2702794C1 |
| Устройство для стабилизации положения сооружения на просадочном основании | 2018 |
|
RU2707822C1 |
| СПОСОБ УСИЛЕНИЯ ФУНДАМЕНТА | 2015 |
|
RU2596621C1 |
| Устройство для выравнивания положения сооружения на просадочном основании | 2018 |
|
RU2704173C1 |
| ДВИЖИТЕЛЬ ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2190552C2 |
| Устройство для выравнивания зданий,сооружений | 1982 |
|
SU1067148A1 |
Изобретение относится к области строительства, а именно к устройствам для выравнивания положения сооружений при неравномерных оседаниях основания. Устройство для корректировки положения сооружений при неравномерных оседаниях основания включает металлический шарнирный ромб, соединенный своими верхним и нижним шарнирами, соответственно, с сооружением и основанием. Боковые шарниры ромба свободно оперты на прикрепленную к сооружению направляющую опорную поверхность в форме части вогнутого цилиндра с радиусом, равным стороне ромба, при этом нижняя половина ромба размещена в параллельной его плоскости сквозной прорези в середине направляющей опорной поверхности. Контактирующие элементы боковых шарниров ромба с краевыми частями направляющей опорной поверхности выполнены в виде полуосей, выступающих с обеих сторон вышеуказанных шарниров. Технический результат состоит в повышении эффективности работы устройства, точности процесса корректировки, упрощении конструкции устройства, повышении его технологичности. 3 ил.
Устройство для корректировки положения сооружений при неравномерных оседаниях основания, включающее металлический шарнирный ромб, соединенный своими верхним и нижним шарнирами, соответственно, с сооружением и основанием, отличающееся тем, что боковые шарниры ромба свободно оперты на прикрепленную к сооружению направляющую опорную поверхность в форме части вогнутого цилиндра с радиусом, равным стороне ромба, при этом нижняя половина ромба размещена в параллельной его плоскости сквозной прорези в середине направляющей опорной поверхности, а контактирующие элементы боковых шарниров ромба с краевыми частями направляющей опорной поверхности выполнены в виде полуосей, выступающих с обеих сторон вышеуказанных шарниров.
| 0 |
|
SU346446A1 | |
| Опора сейсмостойкого здания | 1989 |
|
SU1761927A1 |
| КИНЕМАТИЧЕСКАЯ ОПОРА СЕЙСМОСТОЙКОГО ЗДАНИЯ ИЛИ СООРУЖЕНИЯ | 1993 |
|
RU2049890C1 |
| ОПОРА СЕЙСМОСТОЙКОГО СООРУЖЕНИЯ | 2008 |
|
RU2369693C1 |
| Фундамент сооружений,возводимых на неравномерно деформируемых основаниях | 1980 |
|
SU945287A1 |
| US 4191496 A1, 04.03.1980. | |||

