Изобретение относится к области транспорта, а именно к движителям транспортных средств, и может быть использовано в транспортных средствах высокой проходимости, преимущественно содержащих активную подвеску: вездеходах, снегоходах и болотоходах, сельскохозяйственных машинах, строительно-дорожных машинах и т.п. Кроме того, оно может быть использовано для быстрого преобразования транспортных средств нормальной проходимости в транспортные средства повышенной и даже высокой проходимости.
Известен движитель транспортного средства /пат. Франции 713978, кл. 1, гp. 10, опубл. 1931 г./, содержащий ступицу с ее геометрической осью, плоский замкнутый многозвенник в виде четного количества шарнирами соединенных между собой звеньев одинаковой длины и четное количество расположенных между ступицей и шарнирами устройств прямолинейного движения, установленных с равным угловым шагом относительно геометрической оси ступицы так, что их геометрические оси расположены в плоскости движения многозвенника.
Известен также движитель транспортного средства /Заявка Японии 52-24281, кл. МПК В 60 В 9/12, опубл. 1977 г./, содержащий ступицу с ее геометрической осью, плоский замкнутый многозвенник в виде четного количества шарнирами соединенных звеньев одинаковой длины и четного количества устройств прямолинейного движения, каждое из которых одним своим концом соединено с одним из шарниров многозвенника, а другим со ступицей, при этом все они расположены так, что их обращенные к ступице концы соединены с ней в местах, расположенных с одинаковым угловым шагом относительно ее геометрической оси, а их геометрические оси расположены в плоскости движение многозвенника.
Известен также движитель транспортного средства /пат. РФ 2031039, кл. МПК В 62 D 57/02, опубл. 1995 г./, содержащий ступицу с ее геометрической осью, плоский замкнутый многозвенник в виде шарнирами соединенных четырех звеньев одинаковой длины и четыре устройства прямолинейного движения, каждое из которых одним своим концом жестко соединено со ступицей или конструктивно с ней объединено, а другим своим концом соединено с ближайшим к нему шарниром, при этом все они расположены так, что траектории воспроизводимых ими движений шарниров расположены в плоскости движения многозввенника радиально, с одинаковым угловым шагом относительно геометрической оси ступицы.
Наиболее близким по технической сущности и по достигаемому техническому результату /прототип/ является движитель транспортного средства по пат. РФ 2124449, кл. МПК В 62 D 57/02, опубл. в 1997 г., содержащий ступицу с ее геометрической осью, плоский замкнутый многозвенник в виде четырех шарнирами соединенных звеньев одинаковой длины и четыре устройства прямолинейного движения, каждое из которых одним своим концом жестко соединено со ступицей или конструктивно с ней объединено, а другим своим концом соединено с ближайшим к нему шарниром, при этом все они расположены так, что траектории воспроизводимых ими перемещений шарниров расположены в плоскости движения многозвенника радиально с одинаковым угловым шагом относительно геометрической оси ступицы, а каждом звене упругое опорное устройство с его ходовой поверхностью, причем звено и/или упругое опорное устройство выполнены с возможностью позиционирования последнего и его фиксирования в требуемом положении.
Вышеприведенное выражение ". .. одним своим концом жестко соединено со ступицей или конструктивно с ней объединено..." означает, что узел такого соединения /объединения/ выполнен так, что опускание ступицы под действием приложенной к ней нагрузки приводит к принудительному опусканию шарниров многозвенника, его сжатию в вертикальном направлении и к изменению его конфигурации.
В процессе вращения ступицы движителя конфигурация многозвенника периодически изменяется с ромбической на квадратную и наоборот, благодаря чему обеспечивается высокая проходимость движителя на местности. Упругое опорное устройство выполнено съемным. Его закрепляют на звене при движение по дороге и снимают при движении по местности.
Этот движитель обладает несколькими недостатками.
Первый недостаток известного движителя состоит в том, что поскольку при движении по местности упругие опорные устройства с него снимаются, то он при этом теряет способность смягчать удары и толчки. Это приводит к увеличению нагрузки на подвеску и усложнению ее конструкции.
Второй недостаток известного движителя состоит в том, что в обслуживаемом им транспортном средстве уменьшается грузоподъемность и/или пассажировместимость либо увеличиваются наружные его габариты. Этот недостаток обусловлен нерациональным содержанием упругих опорных устройств отдельно от движителя, например, внутри кузова или корпуса транспортного средства, /в том числе в салоне или в багажнике/ или снаружи /например, на специальных держателях/. Этот недостаток особенно заметен в случае транспортных средств со значительным количеством движителей, например 6 или 8, с количеством опорных устройств соответственно 24 или 32 и даже больше, с учетом необходимости запасных упругих опорных устройств.
Третий недостаток известного движителя состоит в неудобстве его эксплуатации. Он обусловлен необходимостью извлекать для монтажа на движитель тяжелые упругие опорные устройства из кузова /корпуса/ транспортного средства либо снимать их снаружи, переносить на движитель и там устанавливать, для чего требуются значительные физические усилия и продолжительное время. Сказанное относится также и к демонтажу.
Первым достигаемым техническим результатом изобретения является устранение первого указанного недостатка и разработка движителя данного типа, в котором упругое опорное устройство используется для смягчения ударов и толчков при движении не только по дороге, но и по местности, с соответствующим облегчением работы подвески и упрощением ее конструкции.
Вторым достигаемым техническим результатом изобретения является устранение второго указанного недостатка и разработка движителя данного типа, при использовании которого обеспечивается увеличение полезной грузоподъемности и/или пассажировместимости обслуживаемого транспортного средства, а также уменьшение наружных его габаритов.
Третьим достигаемым техническим результатом изобретения является устранение третьего указанного недостатка и разработка движителя данного типа, удобного в эксплуатации.
Согласно изобретению все указанные технические результаты достигаются благодаря тому, что в движителе транспортного средства, содержащем ступицу с ее геометрической осью, плоский замкнутый многозвенник в виде четырех шарнирами соединенных звеньев одинаковой длины и четыре устройства прямолинейного движения, каждое из которых одним своим концом жестко соединено со ступицей или конструктивно с ней объединено, а другим своим концом соединено с ближайшим к нему шарниром, при этом все они расположены так, что траектории воспроизводимых ими перемещений шарниров расположены в плоскости движения многозвенника радиально с одинаковым угловым шагом относительно геометрической оси ступицы, на каждом звене упругое опорное устройство с его ходовой поверхностью, причем звено и/или упругое опорное устройство выполнены с возможностью позиционирования последнего и его фиксирования в требуемом положении, так, что в указанном положении ходовая поверхность этого опорного устройства направлена к ступице, а само оно по меньшей мере частично расположено в пространстве между ближайшими к нему устройствами прямолинейного движения с возможностью прикосновения по меньшей мере участка указанной ходовой поверхности с хотя бы участком одного из соседних с ним упругих опорных устройств и/или с по меньшей мере участком одного из указанных устройств прямолинейного движения.
Изобретение иллюстрируется двумя примерами его практического осуществления. В любом из них упругое опорное устройство может быть выполнено с жесткой оппозитно расположенной относительно его ходовой поверхности стороной или закреплено на жестком основании в виде пластины или рамы с образованием шинной секции. Оно также может быть выполнено с мягкой оппозитно расположенной относительно его ходовой поверхности стороной или закреплено на мягком основании. Кроме того, в упругом опорном устройстве, со стороны его ходовой поверхности, по его концам могут быть выполнены открытые продольные канавки переменной глубины для частичного размещения в них устройств прямолинейного движения.
В первом примере шинная секция может быть выполнена с ходовой поверхностью, скругленной по радиусу качения в плоскости движения многозвенника; по меньшей мере одно из устройств прямолинейного движения может быть оборудовано фиксатором возвратно-поступательного перемещения его элементов; шинная секция может быть установлена на звене поворотно и оборудована цилиндрическим фиксатором его поворота; звено может быть выполнено в виде цилиндрического валика с проушинами шарниров по торцам и сквозным цилиндрическим отверстием для фиксатора поворота в средней своей части, а к пластине или раме могут быть прикреплены два взаимно перпендикулярных цилиндрических канала с расположением их геометрических осей в одной плоскости, причем продольный предназначен для размещения в нем валика, поперечный - для фиксатора поворота.
Во втором примере шинная секция может быть выполнена с плоской ходовой поверхностью и установлена на звене съемно в радиальном относительно геометрической оси ступицы направлении, а звено может быть выполнено в виде прямоугольной в плане рамы или пластины с подкрепленным по контуру шинной секции вырезом в средней части последней, с проушинами шарниров по коротким сторонам и с грунтозацепами.
Первый заявленный технический результат достигается благодаря тому, что при движении по дороге упругое опорное устройство каждой шинной секции своей ходовой поверхностью обращено от ступицы, а все секции движителя работают как участки обычной шины, смягчая толчки и удары. При движении по местности упругое опорное устройство каждой шинной секции своей ходовой поверхностью обращено к ступице и при каждом сжатии движителя /в процессе изменения его конфигурации из ромбической в квадратную и наоборот/ по меньшей мере участком своей ходовой поверхности упруго взаимодействует с таким же участком упругого опорного устройства соседней шинной секции и/или с по меньшей мере участком одного из ближайших устройств прямолинейного движения. Упругий материал этих опорных устройств сжимается, поглощая энергию толчков и ударов, а сами они выполняют несвойственную им функцию упругих элементов подвески. При этом вследствие трения /как внутреннего в упругом материале, так и внешнего при взаимодействии указанных участков между собой и/или с указанными участками устройств прямолинейного движения/ происходит по меньшей мере частичное демпфирование возникающих колебаний. Таким образом, упругие опорные устройства в составе шинных секций выполняют также несвойственную им полезную функцию демпфера колебаний. Соответственно уменьшается степень необходимости в усиленной подвеске обслуживаемого транспортного средства.
Второй заявленный технический результат достигается благодаря тому, что упругие опорные устройства расположены не отдельно от движителя, а на нем самом в пространстве между звеном и двумя присоединенными к его шарнирам устройствами прямолинейного движения. При этом отсутствует необходимость в полезных объемах для размещения шинных секций и потому возрастают грузовместимость и/или пассажировместимость транспортного средства и не увеличиваются его наружные габариты.
Третий заявленный технический результат достигается вследствие того, что благодаря размещению упругого опорного устройства в пространстве между ближайшими устройствами прямолинейного движения устраняется необходимость в переноске секции на значительное расстояние. Здесь секции при переналадке движителя с дорожного режима на внедорожный и наоборот в первом примере просто расфиксируют, переворачивают относительно звена на 180о и oснова фиксируют, а во втором расфиксируют, снимают со звена, переворачивают на 180о, снова укладывают на прежнее место и фиксируют.
Как было показано выше, в движителе при движении по местности обеспечивается возможность его использования как упругого элемента подвески с частичным демпфированием. Кроме того, при движении по местности упругое опорное устройство шинной секции выполняет и другие, не свойственные ему, новые полезные функции, а именно:
- оно работает в качестве упругого ограничителя сжатия /буфера/ ромба, предотвращая чрезмерное взаимное сближение звеньев многозвенника;
- оно периодически, по мере вращения движителя, поддерживает растянутые /при ромбической конфигурации многозвенника/ части устройства прямолинейного движения снизу, предотвращая их возможный прогиб под действием силы тяжести, а значит их возможное взаимное заедание;
- оно периодически, по мере вращения движителя, перекрывает части устройства прямолинейного движения, предотвращая их взаимное смещение под действием толчков, ударов и т.п.
Таким образом, данное техническое решение удовлетворяет критериям новизны, промышленной применимости и изобретательского уровня и потому может быть признано изобретением.
Сущность изобретения поясняется прилагаемыми чертежами, на которых изображено:
Фиг.1 - Движитель /первый пример/ в сборе; свободная ромбическая конфигурация многозвенника; положение готовности к движению по местности; вид спереди.
Фиг.2 - То же; вид сбоку.
Фиг.3 - То же; фиксированная квадратная конфигурация многозвенника; положение готовности к движению по местности; вид спереди.
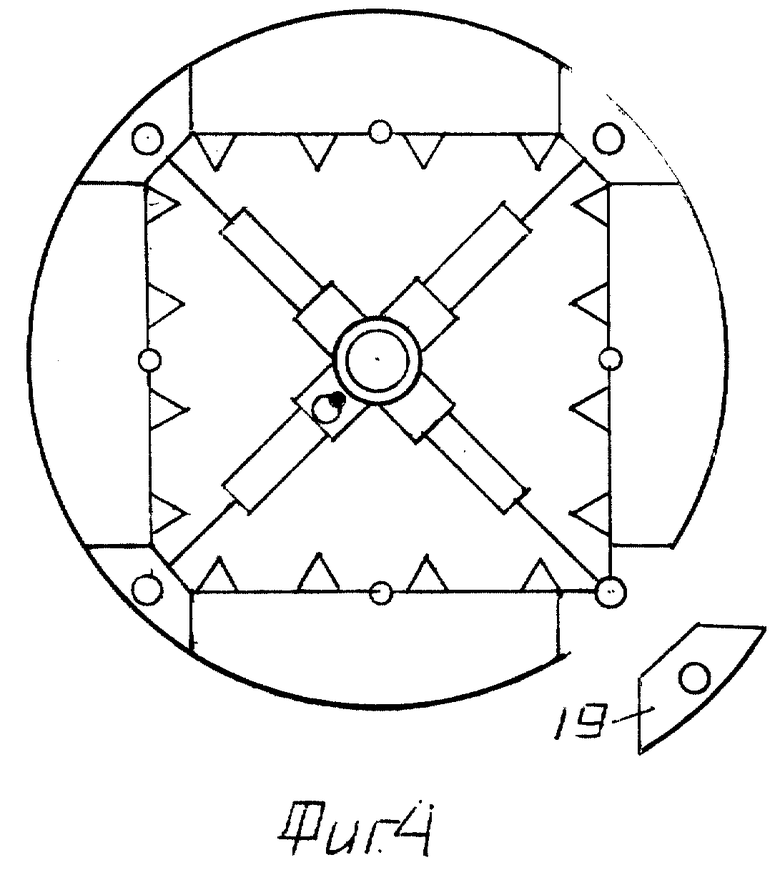
Фиг.4 - То же; круглый обвод; положение готовности к движению по дороге.
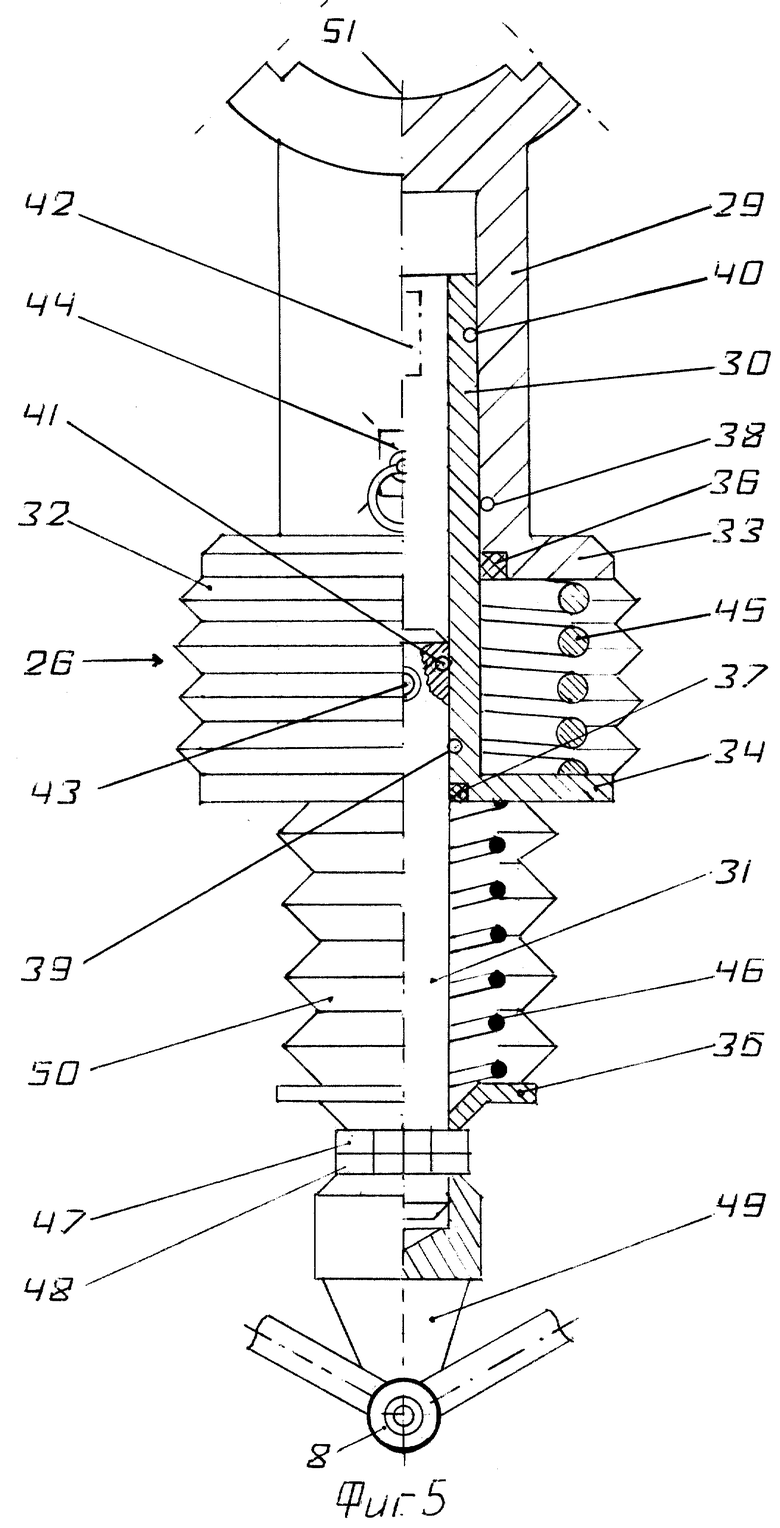
Фиг.5 - Устройство прямолинейного движения.
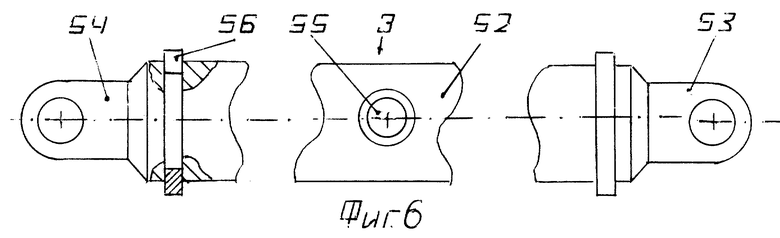
Фиг.6 - Звено; вид спереди.
Фиг.7 - То же; вид сверху.
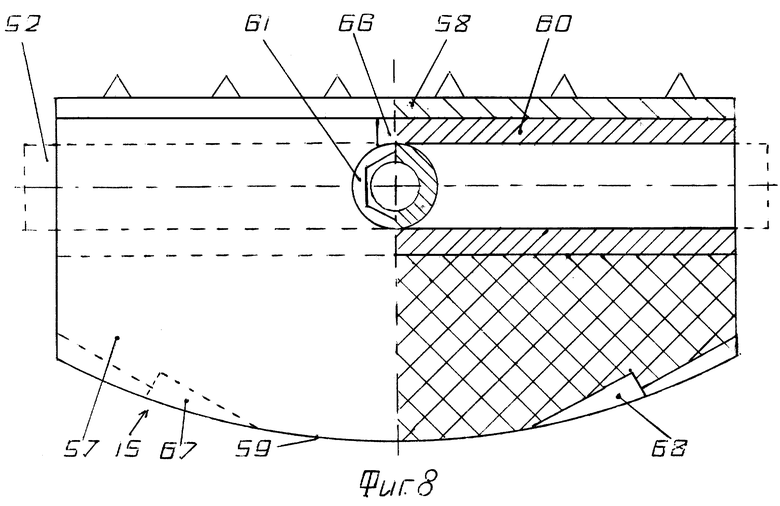
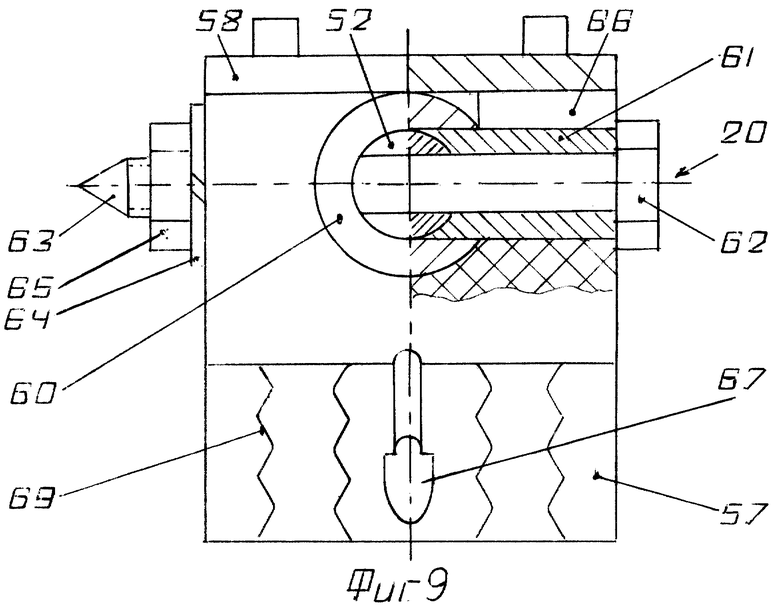
Фиг.8 - Шинная секция в сборе; вид спереди.
Фиг.9 - То же; вид сбоку.
Фиг.10 - Сильфон.
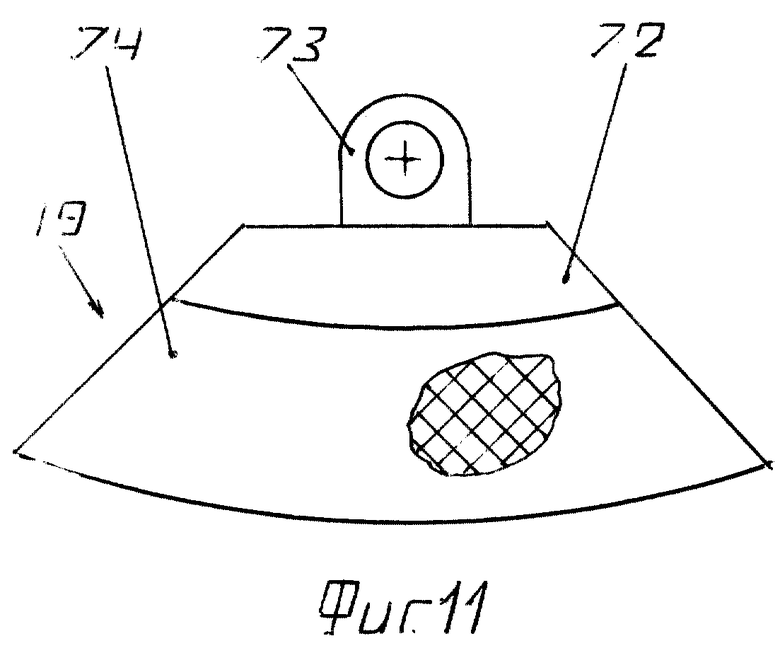
Фиг.11 - Угловая скругленная шинная секция; вид спереди.
Фиг.12 - То же; вид сбоку.
Фиг.13 - Фиксатор возвратно-поступательного движения.
Фиг.14 - Шарнирный узел.
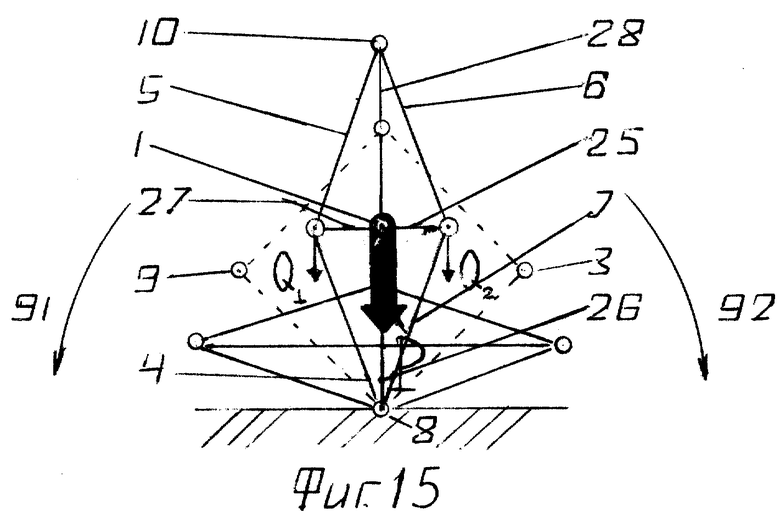
Фиг.15 - Система сил, действующих на движитель при нахождении его в конфигурации "вертикальный ромб".
Фиг.16 - Движитель в конфигурации "наклонный ромб".
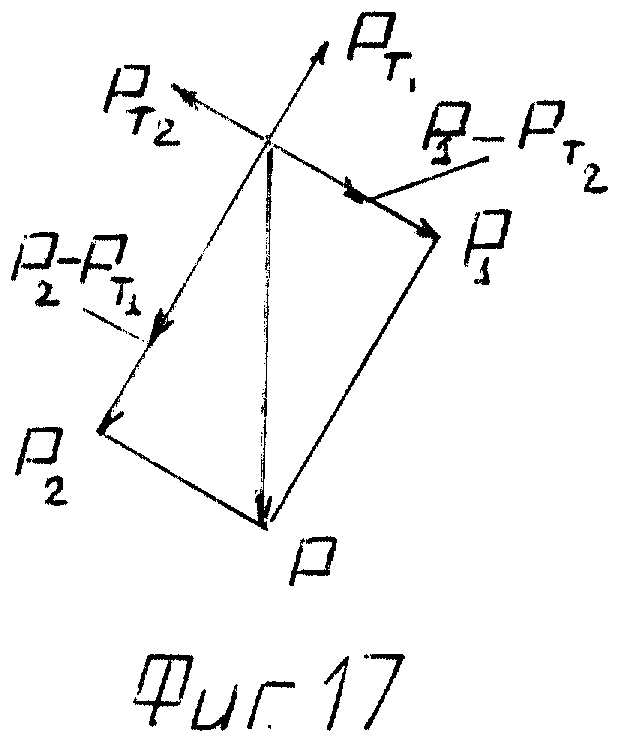
Фиг. 17 - Система сил, действующих на движитель в конфигурации "ромб с горизонтальным основанием, обращенный влево".
Фиг. 18 - Движитель в конфигурации "ромб с горизонтальным основанием, обращенный влево" /схема/.
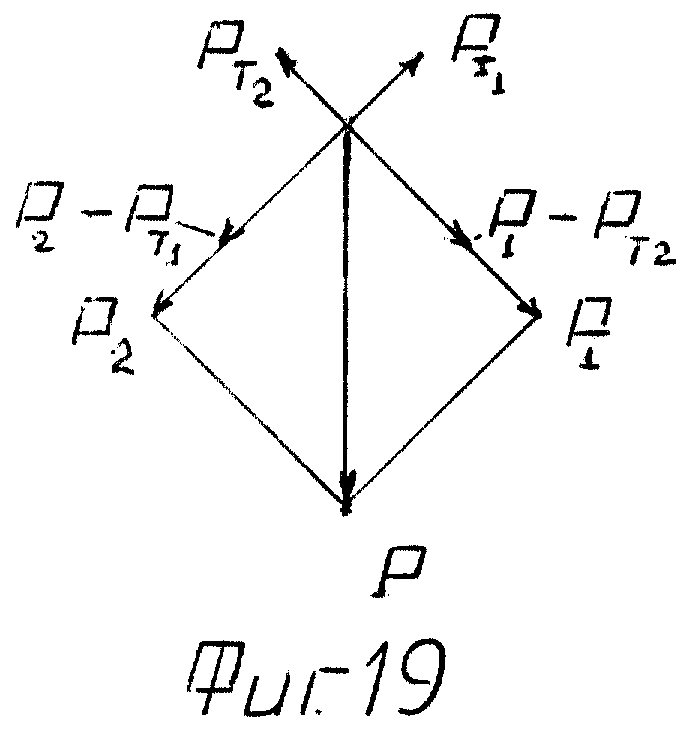
Фиг.19 - Система сил, действующих на движитель в конфигурации "квадрат с горизонтальным основанием".
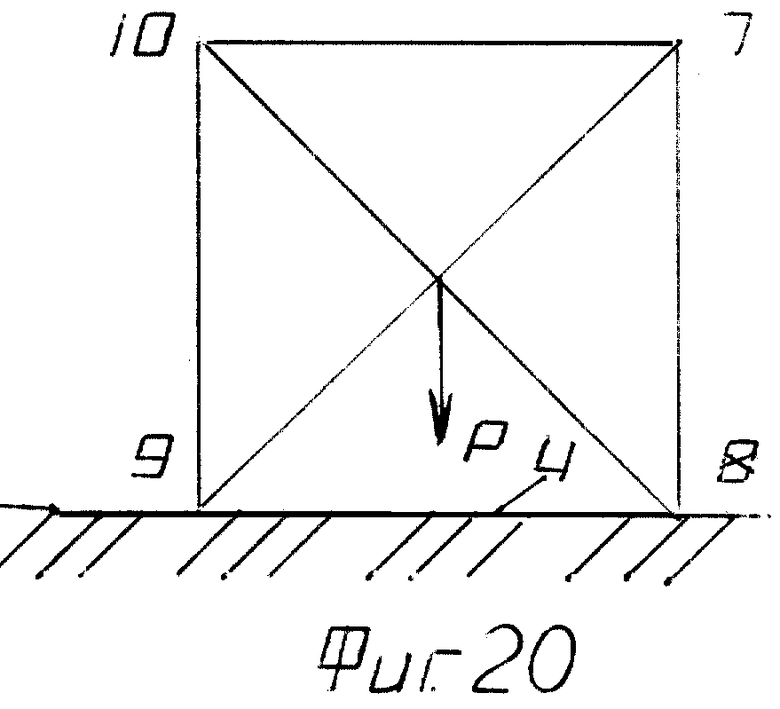
Фиг. 20 - Движитель в конфигурации "квадрат с горизонтальном основанием" /схема/.
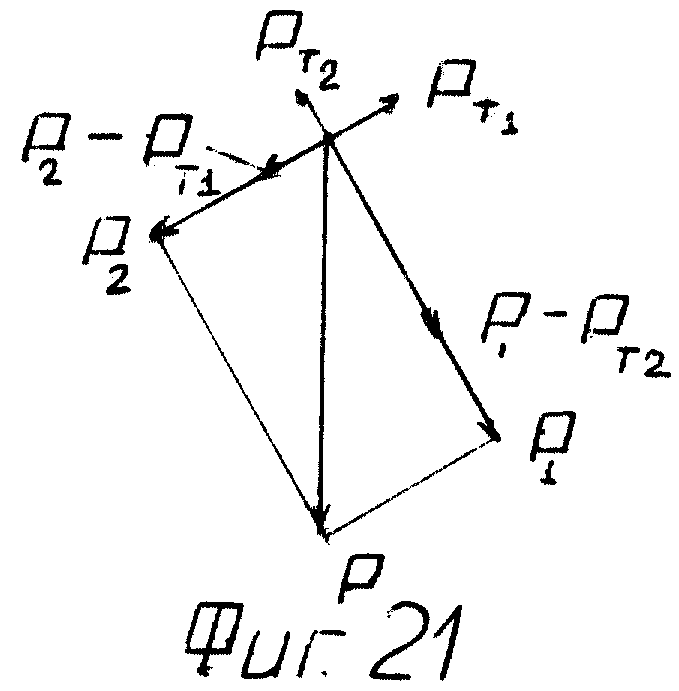
Фиг. 21 - Система сил, действующих на движитель в конфигурации "ромб с горизонтальном основанием, обращенный вправо".
Фиг. 22 - Движитель в конфигурации "ромб с горизонтальном основанием, обращенный вправо", /схема/.
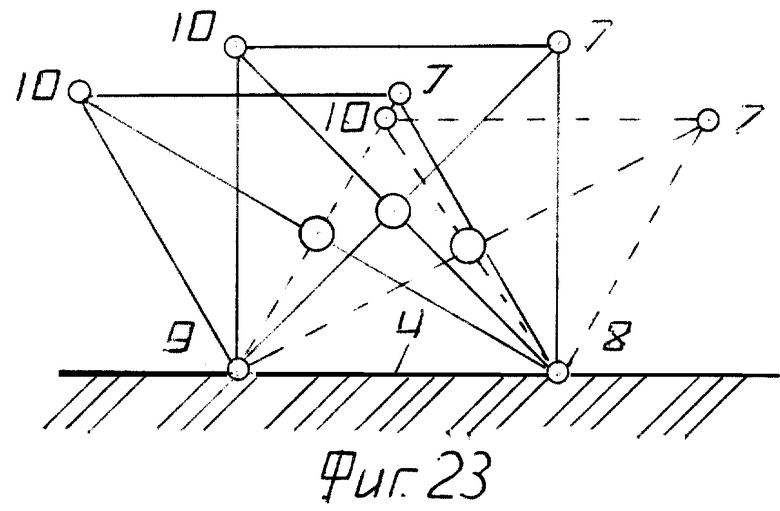
Фиг.23 - Схематическое изображение основных фаз поступательного перехода движителя из конфигурации "ромб с горизонтальном основанием, обращенный влево" через конфигурацию "квадрат с горизонтальном основанием" в конфигурацию "ромб с горизонтальном основанием, обращенный вправо".
Фиг. 24 - Схематическое изображение основных фаз перекатывания движителя в конфигурации "ромб".
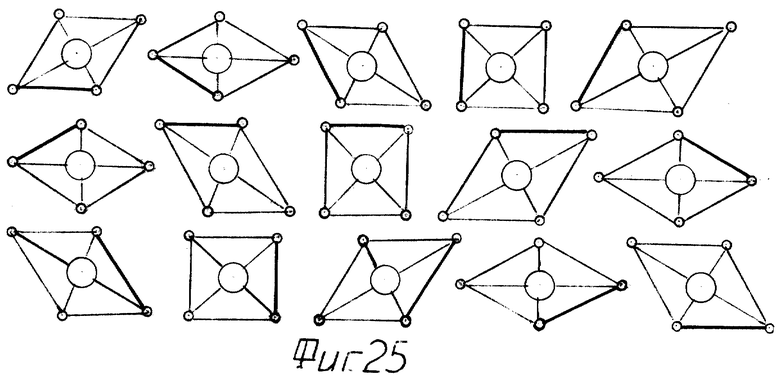
Фиг.25 - Суммарное схематическое изображение основных фаз рабочего цикла движителя.
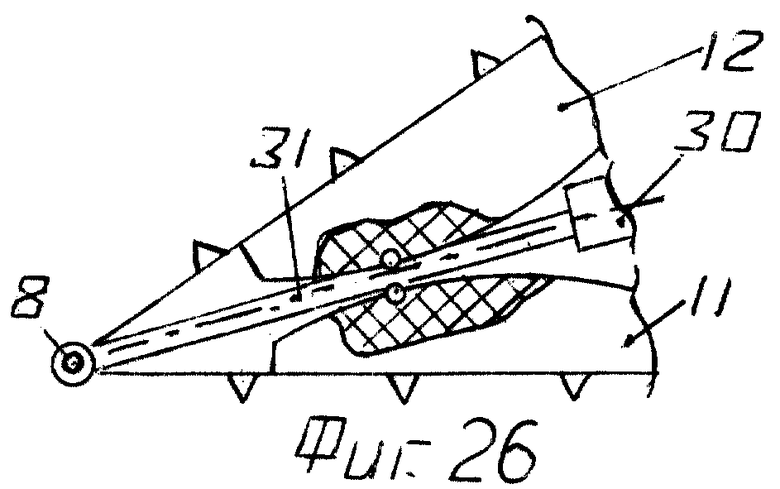
Фиг. 26 - Часть движителя в свободной ромбической конфигурации в начальный момент контакта между обращенными друг к другу упругими опорами и коленом устройства прямолинейного движения.
Фиг. 27 - Часть движителя в свободной ромбической конфигурации в момент полного контакта между обращенными друг к другу упругими опорами, снабженными канавками переменной глубины /вид спереди/.
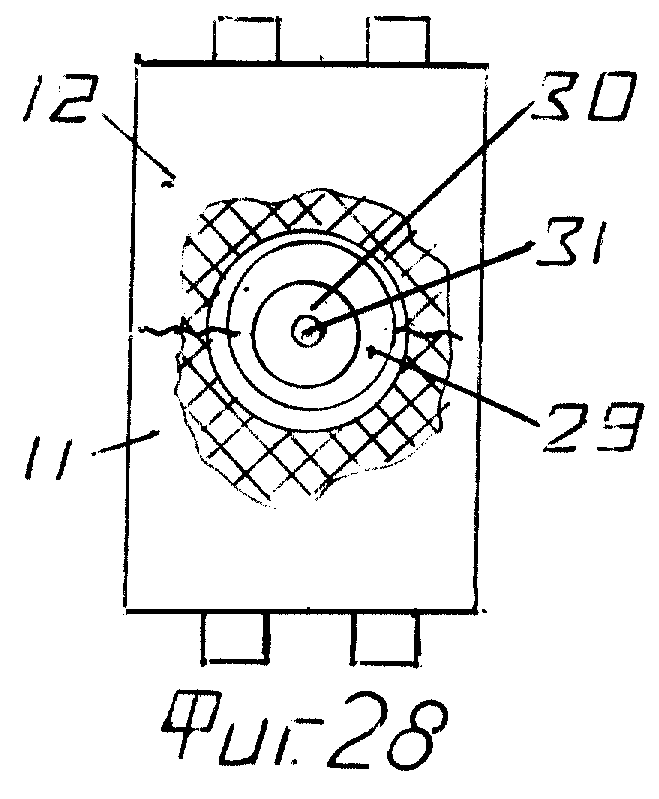
Фиг.28 - То же, вид сбоку; поперечный местный разрез.
Фиг.29 - То же, что и на фиг.27, но без канавок переменной глубины.
Фиг.30 - То же, вид сбоку; поперечный местный разрез.
Фиг. 31 - Первая фаза процесса фиксирования устройства прямолинейного движения.
Фиг.32 - То же, вторая фаза.
Фиг.33 - То же, третья фаза.
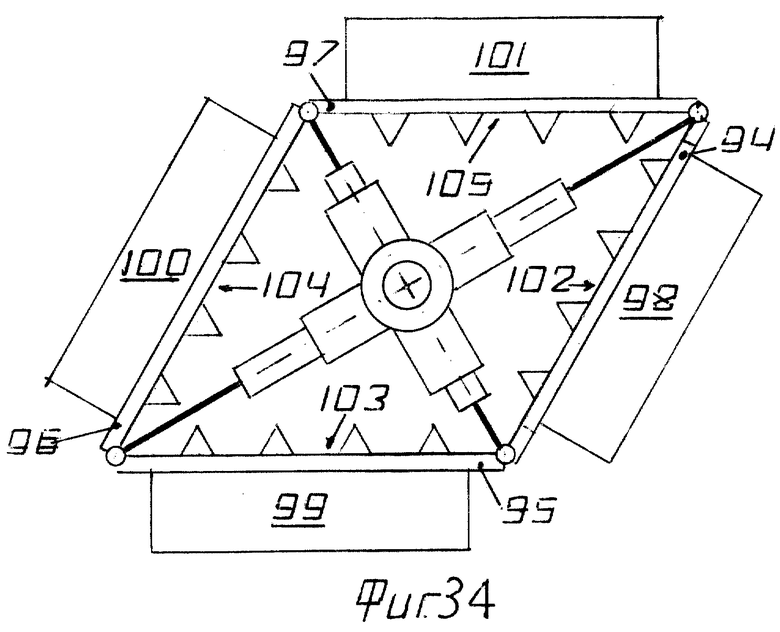
Фиг. 34 - Движитель /второй пример/ в сборе; свободная ромбическая конфигурация многозвеиника; положение готовности к движению по дороге; вид спереди.
Фиг.35 - То же, вид сбоку.
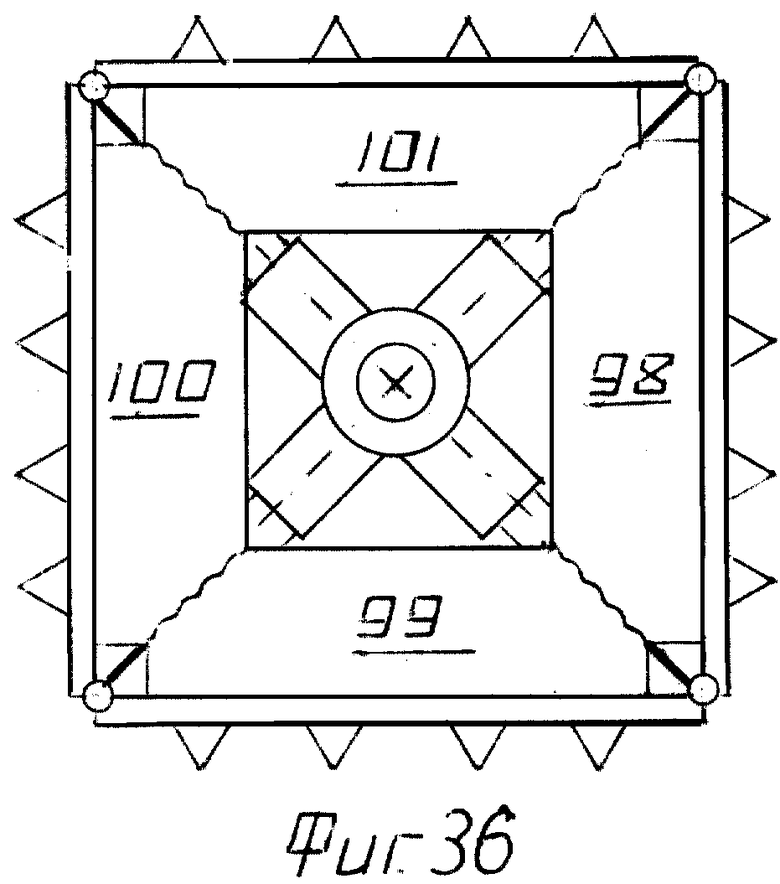
Фиг. 36 - То же; свободная квадратная конфигурация многозвенника; положение готовности к движению по местности.
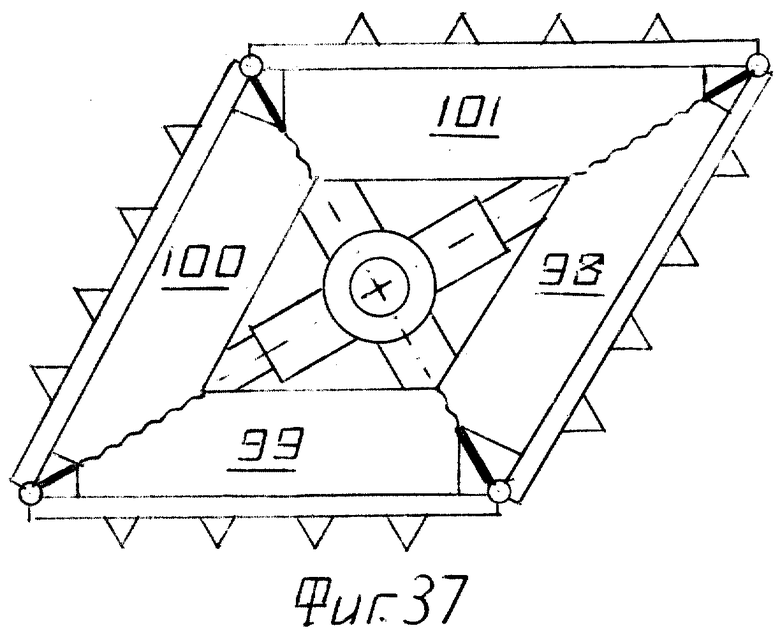
Фиг.37 - То же; свободная ромбическая конфигурация многозвенника.
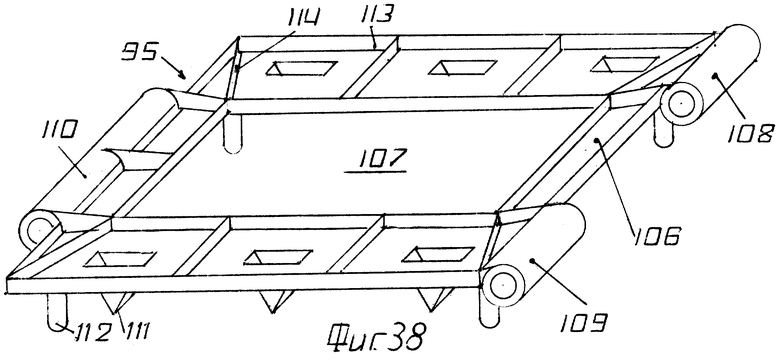
Фиг. 38 - Звено четырехзвенника в положении готовности к движению по местности.
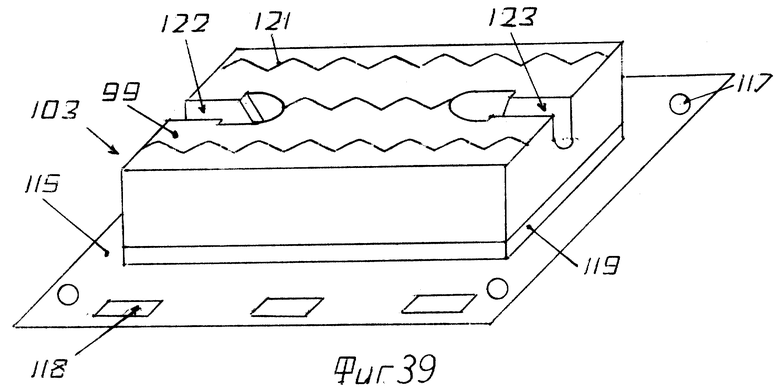
Фиг.39 - Шинная секция в положении готовности к движению по местности.
Фиг.40. - То же, в положении готовности к движению по дороге.
Фиг. 41 - Транспортное средство с движителями /на балансирах/ по первому примеру, при движении по дороге.
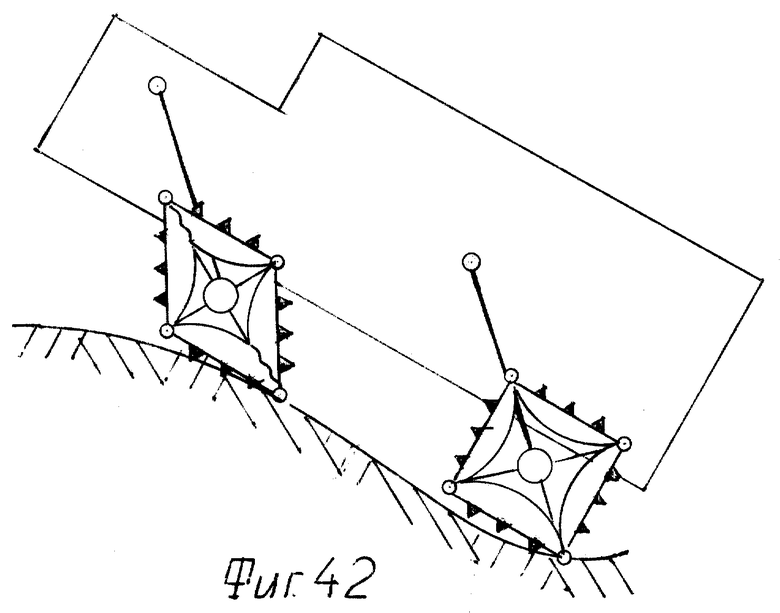
Фиг.42 - То же; при движении по пересеченной местности.
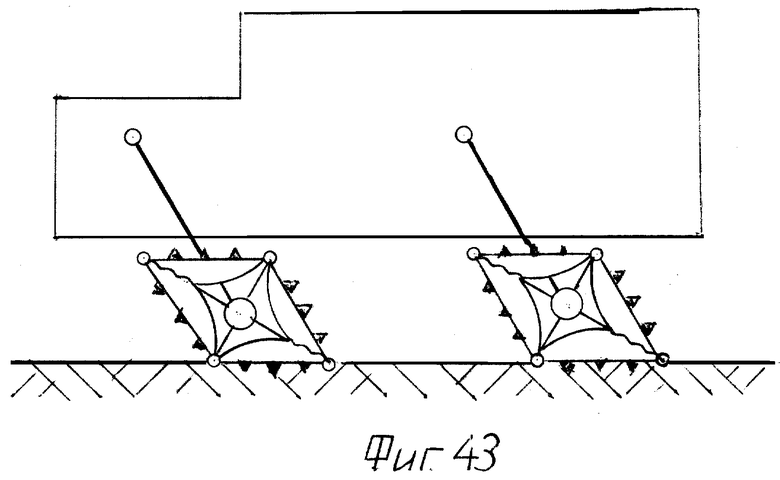
Фиг.43 - То же; при движении по болотистому грунту.
В первом примере практического осуществления изобретения движитель в сборе /фиг. 1, 2, 3 и 4/ содержит ступицу 1 с ее геометрической осью 2 и опорный на грунт плоский замкнутый многозвенник /не обозначен/ в виде четырех звеньев 3, 4, 5 и 6 одинаковой длины, соединенных шарнирами 7, 8, 9 и 10. На каждом звене расположено скругленное упругое опорное на грунт устройство /далее - упругая опора/ 11, 12, 13 и 14, закрепленное на своей поддерживающей его жесткой опоре /не показана/ с образованием шинных секций, соответственно 15, 16, 17 и 18. На каждом шарнире может быть установлена своя угловая скругленная шинная секция, например 19. На каждой секции расположен свой цилиндрический фиксатор ее поворота, например 20, 21, 22 и 23. На каждом звене расположены грунтозацепы, например шпоры 24. Движитель содержит также четыре устройства 25, 26, 27 и 28 прямолинейного движения, например телескопических, каждое из которых одним своим концом жестко соединено со ступицей или конструктивно с ней объединено, а другим своим концом соединено с ближайшим к нему шарниром; при этом все они расположены так, что траектории воспроизводимых ими прямолинейных движений шарниров расположены в плоскости движения многозвенника /т.е. в плоскости, нормальной к геометрической оси ступицы или параллельной ей/ с одинаковым угловым шагом около 90o. На одном из устройств прямолинейного движения, например 26, расположен его фиксатор /на чертеже показан, но не обозначен; см.фиг.5/.
Как это показано далее, каждое звено, например 3, и/или закрепленная на нем упругая опора, например 11, выполнено /путем надлежащего подбора размеров, геометрической формы, упругости и других характеристик/ так, что последнюю можно привести в такое положение, при котором ее ходовая поверхность обращена к ступице, а сама она по меньшей мере частично расположена в пространстве между ближайшими к ней устройствами, например 25 и 26, прямолинейного движения с возможностью взаимного соприкосновения по меньшей мере участка этой поверхности с по меньшей мере участком хотя бы одного из них и/или с хотя бы участком такой поверхности по меньшей мере одной из соседних с ней упругих опор, например 12 или 14.
Термины "плоский замкнутый многозвенник" и др., относящиеся к нему, использованы в данном описании в смысле, который им придан в теории механизмов и машин. В частности они обозначают, что все точки звеньев движителя описывают траектории, расположенные во взаимно параллельных плоскостях, шарниры являются цилиндрическими, а длина звеньев - это расстояние между геометрическими центрами шарниров.
Как это показано на фиг.5, устройство прямолинейного движения, например 26, выполнено телескопическим /далее - телескоп/ и содержит три колена: корневое 29, промежуточное 30 и оконечное 31. Корневое колено 39 жестко соединено со ступицей, неразъемно /например, приварено/ или разъемно /например, на шпильках/, либо конструктивно с ней объединено /например, отлито или отковано/. Оконечное колено 31 соединено с ближайшим к нему шарниром, например 8. По меньшей мере промежуточное колено 30 защищено от механических повреждений, влаги или грязи посредством раздвижного кожуха, например сильфона 32.
Корневое 29 и промежуточное 30 колена телескопа снабжены кольцевыми отбортовкамм, соответственно 33 и 34 на удаленном от ступицы конце, а на оконечном колене 31 закреплена опорная чашка 35. В зонах отбортовок расположены грязесъемные и уплотнительные, например резиновые тороидальные, кольца 36 и 37, поджимаемые кольцевыми гайками /не показаны/, а также тела качения, из которых условно показаны только два: 38 и 39, например, два в плоскости вращения движителя и два в перпендикулярной к ней плоскости. Тела качения предназначены для уменьшения трения, что необходимо для предотвращения взаимного перекоса колен, их взаимного заедания и т.п. в контакте между смежными поверхностями последних. На обращенных к ступице концах колен расположены другие тела качения, например 40 и 41, аналогичного назначения. Для придания внутренней поверхности колен противозадирных свойств она может быть подвергнута упрочняющей обработке, например сульфоцианированию или селенированию. Для повышения жесткости колен их внутренняя поверхность, кроме того, может быть подвергнута раскатке, а оконечное колено 31, кроме того, может быть выполнено полым и снабжено внутренними крестообразными связями. В промежуточном колене 30 выполнена продольная прорезь 42, в оконечном колене 31 выполнено коническое углубление 43, а в корневом колене 29 выполнено сквозное отверстие /не показано/, в котором размещен ранее упомянутый, но не обозначенный на фиг. 1, фиксатор 44 прямолинейного движения для взаимодействия с указанными прорезью и углублением. Между отбортовками колен расположены цилиндрические пружины сжатия 45 и 46. Пружина 46, охватывающая оконечное колено 31, одним своим концом опирается на отбортовку 34 промежуточного колена 30, а другим на чашку 35 на удаленном от ступицы его участке. Последний снабжен нарезкой /не обозначена/ для гайки 47 и контргайки 48, предназначенных для регулирования положения чашки 35 и тем самым степени поджатия пружин 45 и 46. Эти пружины на всех четырех телескопах движителя предназначены главным образом для равномерного растягивания телескопов по всем четырем направлениям.
Длина нарезанных участков выбрана с запасов, необходимым для обеспечения полного разжатия пружин, например для длительного складского хранения движителя. Концевой участок оконечного колена соединен с вилкой 49 в составе шарнира, например 8 четырехзвенника. Оконечное колено защищено другим сильфоном 50 меньших размеров. Сильфоны 32 и 50 могут быть несминаемыми /например, металлическими, в т.ч. стальными/ или сминаемыми /например, резиновыми или пластмассовыми/. Вместо них могут быть использованы телескопические защитные кожухи. Вся конструкция, показанная на фиг.5, симметрична относительно геометрической оси 51. В данном случае эта ось совпадает с прямолинейной траекторией движения шарнира 8, воспроизводимой данном устройством. Но в общем случае вместо телескопа может быть использовано также устройство прямолинейного движения любой другой конструкции, например в виде т.н. направляющего устройства /например, "прямила" Чебышева/, у которого нет геометрической оси, но есть воспроизводимая им прямолинейная траектория движения. Поэтому в формуле изобретения указана именно она.
Как это показано на фиг.6 и 7, звено, например 3, выполнено в виде цилиндрического валика 52 с проушинами 53 и 54 по торцам и со сквозным цилиндрическим отверстием 55 с заходными фасками /не обозначены/ для фиксатора поворота /см. далее/ в средней его части. По концам валика выполнены кольцевые канавки /не обозначены/ прямоугольного сечения для размещения в них упругих разрезных стопорных колец /зегеров/, например, 56, предназначенных для предотвращения самопроизвольного осевого смещения поворотно насаженной на валик шинной секции. Зегеры условно показаны уже надетыми на валик. Последний может быть выполнен полым.
Как это показано на фиг.8 и 9, шинная секция, например, 15, в сборе содержит упругую опору, например, скругленную в плоскости вращения многозвенника по радиусу качения движителя сплошную упругую шинную накладку 57, закрепленную на шпильках /не показаны/ или приклеенную либо поривулканизированную и т.п. к жесткой опоре /пластине или раме/ 58. Шинная накладка 57 - это частный случай упругой опоры 11. Как показано на чертеже, она выполнена в виде сегмента сплошного цилиндрического резинового блока, но вообще она может быть выполнена, например, в виде сегмента тороидальной бескамерной пневматической шины. Вместо использования пластины /или рамы/ 58 жесткость конструкции может быть обеспечена, например, просто путем соответствующей упрочняющей обработки /например, гамма-облучением/ поверхности скругленной шинной накладки 57, расположенной оппозитно относительно ее ходовой поверхности 59. К пластине /или раме/ 58 прикреплены две взаимно перпендикулярные трубы /или канала/ разного диаметра: продольный 60 и поперечный 61 с их геометрическими осями /не обозначены/, расположенными в одной геометрической плоскости. Продольная труба предназначена для размещения в ней звена, например 3, а поперечная - для цилиндрического фиксатора поворота 20. Для размещения самих этих труб в шинной накладке 57 выполнены две крестообразно расположенные в плане канавки /не обозначены/ постоянной глубины и ширины. Фиксатор 20 содержит болт 62 с конусом-искателем 63 на свободном конце, а также с упругой шайбой 64 и гайкой 65. На валике 52 и на скругленной шинной накладке 57 могут быть установлены стопоры /не показаны/, ограничивающие их взаимный поворот точно на 180о, с тем чтобы при их взаимном упоре болт 62 располагался точно напротив входа в канал /трубу/ 61. Здесь, как и в других аналогичных местах на движителе, на болтах и шпильках вместо простой гайки и упругой шайбы может быть поставлена корончатая гайка с разводным шплинтом. Для компенсации разности диаметров обеих труб и увеличения жесткости места соединения их с пластиной /рамой/ 58 расположена металлическая, поставленная на ребро, покладка 66. На скругленной части шинной накладки 57 со стороны ее ходовой поверхностной 59 по обоим ее концам выполнены открытые продольные канавки 67 и 68 переменной глубины /например, со ступенчатым дном/ для частичного размещения в них ближайших устройств прямолинейного движения /в данном случае 25 и 26, см. фиг.1/. Если шинная накладка 57 выполнена из твердой резины, то размеры и конфигурация этих канавок /см. также фиг.27 и 28/ выбираются так, чтобы они не мешали свободному движению колен телескопа /с надетыми на них сильфонами/, располагаемых между соседними упругими опорами при их взаимном сближении в процессе изменения конфигурации движителя при его движении, т.к. защемление колен может привести к отказу в срабатывании телескопа. На фиг.8 и 9 канавки условно показаны ступенчатыми; но практически, в зависимости от размеров колен телескопа, его хода, размеров упругих опор, их материала и т.п., они могут иметь другой профиль. Если шинная накладка выполнена из мягкой резины и/или если телескопы не оборудованы сильфонами либо они выполнены из сминаемого материала, то иногда можно обойтись без канавок. Шинная накладка может быть выполнена из упругого материала /резины или пластмассы/ в виде сплошной детали или быть снабжена полостями, каналами, отверстиями и т.п. для увеличения упругости. Накладка может быть выполнена также в виде секции тороидальной бескамерной шины. В любом случае на ходовой поверхности могут быть выполнены протекторные канавки 69. Иногда, например, в аварийных случаях, в упругой опоре ее сторона, расположеннае оппозитно по отношению к ее ходовой поверхности, может быть закреплена не на жестком, а на мягком основании, например, если этой опоре заранее придана форма, удобная для ее размещения в пространстве между соседним устройствами прямолинейного движения. На фиг.8 и 9 показана неразъемная шинная секция упрощенной конструкции надеваемая на цилиндрический валик 52 с его торца, что требует частичной разборки движителя.
Однако возможна усложненная конструкция секции, допускающая ее закрепление на нем без такой разборки. Она может быть выполнена составной из двух частей, с плоскостью разъема, содержащей указанные геометрические оси каналов (труб) 60 и 61.
Как это показано на фиг.10, сильфон 32 содержит расположенные по его концам и соосные с ним металлические манжеты 70 и 71 с Г-образными прорезями /не обозначены/ для надевания на отбортовки 33 и 34 корневого 29 и промежуточного 30 колен телескопа. На этих отбортовках расположны штифты /не показаны/ для взаимодействия с этими прорезями с образованием байонетных соединений. Поэтому сильфон можно высвобождать и сдвигать вверх-вниз по колену 30, приоткрывая его, например для обслуживания, и затем закрытия. Аналогичную конструкцию имеет и сильфон 50.
Как это показано на фиг.11 и 12, угловая скругленная шинная секция 19 содержит металлическую обойму 72 с проушинаии, например 73, в которой закреплена скругленная по радиусу качения движителя секторная, с углом при вершине ок. 90o, упругая /например, резиновая/ шинная накладка 74. По конструкции и способу крепления она аналогична шинной накладке 57 /фиг.8 и 9/ и снабжена протекторными канавками например, 75.
Как это показанно на фиг.13, фиксатор 44 возвратно-поступательного прямолинейного движения элементов устройства прямолинейного движения 26, установленный, например, на корневом колене 29 последнего, содержит корпус 76 с внутренней поперечной перегородкой 77 и крышкой 78, в которой закреплена втулка 79 с Г-образной прорезью 80. Внутри корпуса 76 расположен подпружиненный вытяжной степень 81, на нижнем конце которого закреплены полый направляющий цилиндр 82 и фиксирующий конус 83 а на верхнем - вытяжное кольцо 84. Стержень 81 выполнен из двух соосных частей /не обозначены/, соединенных посредством шарнира 85 с возможностью их взаимного осевого поворота. В верхней части стержня 81 закреплен поперечный штифт 86, заведенный указанную Г-образную прорезь 80. Корпус 76 ввинчен в соответствующее сквозное отверстие /не обозначено/ в стенке корневого колена 29 телескопа. На изображенных деталях резьба условно не показана. Фиксатор изображен в выключенном состоянии. Вытяжной стержень 81 поднят и повернут таким образом, что поперечный штифт 86 расположен в коротком вертикальном участке Г-образной прорези 80. Поэтому фиксирующий конус 83 расположен выше уровня внутренней поверхности корневого колена 29 телескопа и потому не препятствует движению остальных его колен. Хотя на движетелеле по фиг.1-4 показан только один фиксатор возвратно-поступательного движения, его достаточно для обеспечения работоспособности движителя, но все же лучше, если их будет два, причем расположенных на взаимно оппозитных корневых коленах телескопов. Второй фиксатор будет дублирующим, обеспечивая надежную работу движителя. Кроме того, он будет обеспечивать балансировку движителя, необходимую, например, при быстрой езде по дороге. Он также будет выбирать возможные люфты.
На фиг.14 показан шарнирный узел, например 8, взаимного крепленая вилки 49 на оконечном колене 31 устройства прямолинейного движения 26 и проушин типа 53 и 54 соседних звеньев 3 и 4 с нанадетыми на них шинными секциями 11 и 12 соответственно /не показаны/. Для удобства компоновки чертежа указанные звенья условно изображены не под углом 90о, а под углом 180о. Геометрические оси отверстий в вилке и всех проушин расположены на общей геометрической оси 87. Все детали взаимно соединены посредством полого цилиндрического пальца 88, расположенного в проушинах охватывающей их вилки 49. Угловая скругленная шинная секция 19, в случае ее использования, закреплена своими проушинами, например, 73, посредством болта 89, упругой шайбы 90 и гайки 91 на этом же пальце 88.
Движитель по первому примеру практического осуществления изобретения может работать в следующих основных режимах:
1. С ромбической конфигурацией многозвенника при некруглом обводе и выключенном фиксаторе устройства прямолинейного движения; движение по местности /фиг.1/.
2. С квадратной конфигурацией многозвонника при некруглом обводе и включенном фиксаторе устройства прямолинейного движения; движение по местности.
3. С квадратной конфигурацией многозвенника при круглом обводе и включенном фиксаторе устройства прямолинейного движения; движение по дороге /фиг.4/.
4. С ромбической конфигурацией многозвенника, при выключенном фиксаторе устройства прямолинейного движения и круглом обводе /не показано/; движение по дороге. Этот режим не рассматривается, т.к. имеется более выгодный предыдущий режим 3 /колесный/.
В любом из указанных режимов цилиндрический фиксатор поворота /например, 20/ постоянно включен и выключается только при необходимости преобразования конфигурации обвода /перед началом движения/ с некруглой на круглую и наоборот. Для этого /Фиг.6, 7, 8 и 9/ свинчивают гайку 65, снимают шайбу 64, вытягивают болт 62 до выхода его конуса-искателя 63 из отверстия 55 в цилиндрическом валике 52 и поворачивают шинную секцию 15 на 180о слегка поджимая болт в продольном направлении до момента западания конуса-искателя 63 в это же отверстие 55, но с противоположной его стороны. Затем болт закрепляют в обратном порядке. При наличии упоров поворот секции гарантированно происходит точно на 180o, и фиксирование упрощается.
Движитель может работать как при выключенном, так и при включенном фиксаторе 44 устройства прямолинейного движения.
Для выключения фиксатора 44 стержень 81 посредством вытяжного кольца 84 /фиг. 13/ слегка приподнимают и поворачивают так, чтобы поперечный штифт 85 расположился в коротком вертикальном участке Г-образной прорези 80. При этом фиксирующий конус 83 приподнимается над внутренней поверхностью корневого колена 29 и не препятствует работе телескопа. На фиг.13 фиксатор 44 показан в выключенном состоянии.
Работа движителя с включенным фиксатором 44 устройства прямолинейного движения иллюстрируется дальнейшими фигурами, на которых телескопы для простоты условно показаны обычными прямыми, без выделения колен. При работе движителя его части в процессе вращения ступицы непрерывно взаимно перемещаются, а сам он принимает множество циклически изменяющихся конфигураций, среди которых можно выделить несколько типовых.
Предположим /фиг. 15/, что в некоторый момент времени движитель, при движении по ровной твердой поверхности, находится в конфигурации "вертикальный ромб" /показано сплошной тонкой линией/ и к его ступице приложена нагрузка Р. Поскольку каждый телескоп является однонаправленным, а его корневые колена /например, 29, фиг.1/ жестко соединены со ступицей или конструктивно с ней объединены, то при этом к боковым вершинам 7 и 9 ромба приложены силы Q1 и Q2, причем соблюдается условие Q1=Q2=P/2. Под действием этих двух сил нижние стороны 3 и 4 ромба отклоняются книзу, поворачиваясь /относительно точки 8 опоры на грунт/ по направлению дуговых стрелок 91 и 92, а вершины 7 и 9 описывают дуги с радиусом, равнин длине секций 3 и 4. Это приводит к принудительному опусканию и удлинению горизонтальных телескопов 25 и 27. Их опускание приводит к укорачиванию нижнего телескопа 26 и сжатию его пружин. Их удлинение приводит к высвобождению их пружин, опусканию вершины 10, укорачиванию верхнего телескопа 28 и сжатию его пружин. В результате ромб сплющивается по вертикали, приобретая конфигурацию "квадрат с вертикальной диагональю" /показан штриховой линнией/. При дальнейшем опускании ступицы указанный процесс продолжается, движитель сплющивается все больше и в конце процесса приобретает конфигурацию "горизонтальный ромб" /показан толстой сплошной линией/. Ромб сплющивается до тех пор, пока процесс не будет приостановлен сжатыми до предела пружинами. Максимальная допустимая степень сжатия ромба регулируется гайками 47 и 48, резиновыми буферами, упругими опорами /см. далее/ и т.п. Степень сжатия - это отношение длин диагоналей ромба. Приведенные в формуле изобретения термины "устройство прямолинейного движения" и "жестко соединено со ступицей или конструктивно с ней объединено" использованы не в идеализированном, а в чисто техническом смысле. Имеется в виду, что признаки, указанные в формуле изобретения, во взаимодействии обеспечивают принудительное перемещение боковых шарниров 7 и 9 в стороны /фиг.15/, а верхнего шарнира 10 вниз, когда к ступице приложена вертикальная нагрузка. В реальном движителе ступица, устройства прямолинейного движения и шарниры могут быть расположены не по общей для них геометрической прямой, а по некоторой линии /например, ломаной/ с определенной стрелой прогиба. Допустимую величину ее можно задать лишь функционально. Важно, чтобы при приложении нагрузки к ступице остальные конструктивные элементы движителя вели себя в вышеуказанном порядке. Поэтому, если в реальном движителе геометрические центры ступицы и шарниров расположены вне траектории, задаваемой устройством прямолинейного движения, т.е. если устройство прямолинейного движения обеспечивает его только "примерно", а ступица соединена с ним "практически" жестко и т.п., то движитель оказывается работоспособным, то он подпадает под действие формулы. Сказанное относится и к другим элементам формулы.
Продолжая рассмотрение работы движителя, предположим, что, вращаясь по часовой стрелке, он в некоторый момент времени находится в конфигурации "наклонный" ромб" /фиг.16/, при которой его большая диагональ 8, 10 расположена не вертикально, а под некоторым углом α к дороге. При этом к ступице по-прежнему приложена нагрузка Р. Силу Р можно разложить на две составляющие Р1 и Р2 /фиг.17/, направленные по большой и малой диагоналям ромба. При этом в результате взаимодействия с телескопами к ступице приложены также силы трения Рт1 и Рт2, условно показанные в увеличенном масштабе. Поэтому по большой диагонали приложена разность сил Р1-Рт2, а по малой диагонали - разность сил Р2-Рт1.
При этом Р2-Рт1>Р1-Рт2. Разность сил P1-Рт2 действует аналогично приложенной вертикальной силе Р /фиг.15/, вызывая сжатие ромба по направлению его большое диагонали, в результате чего он сплющивается, а его нижнее основание 4 приближается к грунту. Пружины на длинной диагонали ромба препятствуют его сжатию, а пружины на короткой его диагонали - помогают. Одновременно с этим разность двух других сил Р2-Рт1 создает некоторый вращающий момент, поворачивающий ромб относительно опорной вершины 8 против часовой стрелки, и тем самым также приближает основание 4 ромба к грунту. Таким образом, основание ромба приближается к грунту сразу по двум причинам: вследствие сжатия ромба и вследствие его поворота. Когда основание 4 ромба приходит в контакт с грунтом, то возникает реакция опоры также и вдоль малой его диагонали. Поскольку, как указывалось выше, Р2-Рт1>Р1-Рт2, то сжатие по малой диагонали оказывается сильнее сжатия по большой диагонали и основание ромба прочно прижимается к грунту /фиг. 18/. При этом движитель приобретает устойчивую конфигурацию "ромб с горизонтальным основанием" /фиг.18/. При этом верхняя вершина ромба обращена влево. При дальнейшем вращении ступицы по часовой стрелке ромб под действием разности сил Р2-Рт1 сначала остается сжатым больше по малой диагонали, чем по большой. Но по мере поворота ступицы крутизна малой диагонали уменьшается, а крутизна большей - увеличивается. Поэтому происходит перераспределение указанных разностей сил и наступает момент, когда Р2-Рт1=Р1-Рт2, т.е. когда эти разности выравниваются, при этом движитель приобретает конфигурацию "квадрат с горизонтальным основанием" /фиг.19 и 20/.
При дальнейшем вращении ступицы в том же направлении происходит дальнейшее перераспределение указанных сил, в результате чего движитель снова приобретает конфигурацию "ромб с горизонтальным основанием", но уже с верхней вершиной, обращенной вправо /фиг.21 и 22/.
В результате оказывается, что при фазах движения, показанных на фиг. 18-22, звено 4 многозвенника практически не отрывается от грунта, т.е. движитель работает в гусеничном режиме. Эти фазы движения в совмещенном виде показаны на фиг.23.
Процесс изменения конфигурации движителя зависит от величины трения в нем. Если трение сравнительно невелико, то основание ромба не отрывается от грунта. Для уменьшения трения предусмотрены соответствующие антифрикционные мероприятия, например использование в телескопах тел качения. Если трение сравнительно велико, то основание ромба сначала несколько отрывается от грунта /сохраняя, однако, с ним контакт в опорной вершине ромба/, но затем снова на него опускается.
Из сказанного следует, что конфигурация движителя по фиг.15 практически не достигается и была рассмотрения только для иллюстрации принципа работы движителя. Вместо нее реально встречается конфигурация по фиг.16, а еще чаще - по фиг.18.
Предположим теперь, что ступица движителя, находящегося в устойчивой конфигурации "ромб с горизонтальном основанием, обращенный вправо" /фиг.22/ вращается по направлению дуговой стрелки 93 /фиг.24/. При этом его вершины 7, 9 и 10 перемещаются по направлению этой же стрелки. Движитель перекатывается, опираясь на вершину 8 тупого угла, сохраняя исходную конфигурацию "ромб с горизонтальным основанием" по фиг.22. Но при этом он сменяет опору с основания 4 на основание 3, работая в режиме некруглого колеса.
Затем он снова начинает пониматься, опираясь теперь уже на вершину 7 острого угла. При этом повторяется процесс, рассмотренный ранее, применительно к фиг.18.
Как при переходе движителя через конфигурацию "квадрат с горизонтальным основанием", так и при перекатывании /фиг.23 и 24/ направление остроугольной, удаленной от грунта, вершины ромба меняется на обратное: если сначала она была обращена влево, то теперь обращается вправо и наоборот.
Таким образом, рабочий цикл движителя сопровождается периодическим изменением его конфигурации. Периодически изменяется и режим его работы: с гусеничного /фиг.23/ на некруглоколесный /фиг.24/, затем снова на гусеничный и т.д. Иными словами, движитель работает в колесно-гусеничном режиме.
В данном описании многозвенником именуется многозвенное замкнутое само на себя устройство переменной в процессе движения конфигурации, предназначенное для опирания на грунт и взаимодействия с ним.
Основные фазы результирующего цикла работа движителя при вращении ступицы по часовой стрелке показаны на фиг.25; при этом одна из сторон ромба условно утолщена, чтобы легче было следить за процессом движения.
На данной фигуре введены следующие упрощения:
1. Между конфигурапиями "ромб с горизонтальным основанием" и "квадрат с горизонтальном основанием" опущена конфигурация "наклонный ромб", т.к. она является кратковременной, переходной и неустойчивой.
2. Для экономии площади чертежа показана только первая половина рабочего цикла. Хотя исходное /условно утолщенное/ основание и вернулось в исходное опорное на грунт положение, верхняя острая вершина ромба обращена не вправо, а влево. Вторая половина рабочего цикла, после отработки которой все элементы ромба возвращаются в исходное положение, является зеркальном отражением первой его половины и потому здесь не показана.
Поскольку гусеничный движитель обладает высокой проходимостью, и некруглоколесный движитель также обладает высокой проходимостью, то высокой проходимостью обладает и данный колесно-гусеничный движитель.
Машина, оборудованная движителями данного типа, управляется любым известном способом, например притормаживанием движителей одного борта.
Толчки при наезде на препятствие смягчаются подвеской машины и, как это показано далее, упругими опорами, обращенными к ступице.
Как указывалось ранее, движитель с выключенным фиксатором 44 устройства прямолинейного движения в процессе вращения ступицы периодически переходит из ромбической конфигурации в квадратную и наоборот, а ромб соответственно разжимается и сжимается и наоборот. Если упругие опоры обращены к ступице /например, при движении по местности, фиг.1/, то при сжатии ромба они попарно взаимно сближаются /секции 11, 12 и 13, 14/, контактируя с ближайшими телескопами /соответственно 26 и 28/ и /или между собой /зона контакта условно обозначена волнистой линией/.
По мере вращения движителя взаимно контактирующие упругие опоры и телескопы периодически меняются местами. Например, вместо контактирования с телескопами 26 и 28 указанные опоры отходят от них и контактируют /уже противоположными своими оконечностями/ с телескопами 25 и 27 и опорами секций 13 и 14 соответственно. При этом в любом сочетании участники контакта вызывают упругую деформацию материала /например, резины/ соответствующей опоры /опор/.
При наезде движителя на препятствие ромб сжимается дополнительно и тем самым обеспечивается дополнительная деформация материала, а значит и компенсация возникающих толчков и ударов. При этом упругие опоры работают в режиме упругих элементов подвески.
Упругие опоры, например 11 и 12 /фиг.26/, приступают к работе в этом режиме, начиная с момента их точечного контакта с коленом расположенного между ними устройства прямолинейного движения, в данном случае с оконечным коленом 31, точки контакта с которым условно показаны маленькими кружочками /не обозначены/.
Хотя в данном теоретическом случае речь идет о точках, реально контакт происходит на небольшом участке ходовой поверхности опоры с небольшим участком устройства прямолинейного движения, как это и указано в формуле.
В нижней из этих точек упругая опора 11 механически поддерживает растянутый телескоп, предотвращая его возможный прогиб, а значит и заедание.
Кроме того, эта опора одновременно выполняет функцию ограничителя сжатия многозвенника, предотвращая чрезмерное взаимное сближение его звеньев.
В общем случае в указанных точках контакта между коленом телескопа и упругими опорами возникают силы трения, притормаживающие колено и тем самым поглощающими энергии, выделяемую при толчках и ударах при наезде на препятствие. Кроме того, энергия поглощается за счет трения в шарнирах движителя, между коленами телескопа /например, в уплотнительных устройствах и т.п./. В результате образуется эффект демпфирования колебаний, а движитель представляет собой самодемпфирующуюся колебательную систему.
Степень демпфирования можно регулировать, например, изменяя толщину упругой опоры, ее материал, величину трения в шарнирах и т.п.
Указанный точечной контакт происходит в самом начале процесса сжатия ромба. Дальнейшая работа движителя зависит от упругости материала и от силы трения в контакте, например, от твердости материала /например, резины/ упругого опорного устройства.
В случае твердого материала такой контакт может привести к защемлению колена и потере им подвижности, и, как следствие, к сбою в работе движителя. Для устранения этой возможности предусмотрены канавки, например, 68, переменной глубины /фиг.8 и 27/. Благодаря этой канавке между упругими опорами 11 и 12 и коленами 30 и 31 телескопа образуется кольцевой зазор /фиг.28, не обозначен/, и потому эти опоры контактируют не с коленами телескопа, а между собой /область контакта условно обозначена волнистой линией/. При этом демпфирование колебаний происходит за счет трения между самими опорами 11 и 12.
В случае мягкого материала в местах контакта возникает меньшее трение и потому необходимость в таких канавках может отпасть. /фиг.29 и 30/. Контакт упругие опор 11 и 12 с коленами 30 и 31, а также между собой, не приводит к защемлению колен, но лишь замедляет их движение. Поэтому упругие опоры /например, при взаимодействии между собой/ работают в режиме упругих элементов подвески, а при взаимодействии с движущимися коленами телескопа - как демпфирующие элементы. Поэтому в штатной подвеске машины при постановке на нее данного движителя иногда можно обойтись без дополнительных демпфирующих устройств.
Термина "твердая" и "мягкая" резина использована не в абсолютном физическом, а в относительном смысле, в зависимости от создаваемой ею силы трения в контакте. Если, например, покрыть наружную поверхность металлических колен телеокопа и/или контактную с ними поверхность упругой опоры веществом, снижающим их взаимное трение, то может оказаться, что "твердая" резина станет мягче "мягкой", работающей без такой смазки.
Независимо от материала упругой опоры канавки указанного типа необходимы в случае телескопов с жесткими в радиальном направлении защитными кожухами, например сильфонными.
Как при наличии канавок, так и при их отсутствии упругий материал, охватывающий колена телескопа с боковых его сторон, периодически, по мере вращения движителя, ограждает колена сбоку, защищая их от загрязнения и предотвращая их поперечное смещение под действием боковых ударов, толчков и т. п.
Итак, как это видно из сказанного и из фиг.1, секции движителя располагаются на нем самом и потому для них не требуется специальных объемов на обслуживаемом транспортном средстве. Поэтому на этом средстве увеличивается полезная пассажировместимость и/или грузоподъемность.
Как это видно из сказанного и из фиг.1 и 8, секции удобно расположенны на стержнях и для перевода движителя из дорожной конфигуарции во внедорожную и наоборот их достаточно расфиксировать, перевернуть на 180o и снова зафиксировать, не перенося с места на место. Тем самым достигается удобство в эксплуатации.
Как это видно из сказанного и из фиг.26, движитель обеспечивает смягчение толчков и ударов при движении не только по дороге, но и по местности.
Как это также видно из сказанного и из фиг.26, упругая опора работает в качестве упругого ограничителя сжатия /буфера/ ромба, предотвращая чрезмерное взаимное сближение звеньев многозвенника.
Как это также видно из фиг.26, упругая опора поддерживает снизу растянутое /в ромбической конфигурации движителя/ колена телескопа, предотвращая его прогиб, а значит и возможное взаимное заедание его колен.
Как это видно из сказанного и из фиг.28 и 30, упругая опора периодически, по мере вращения движителя, ограждает колена телескопа сбоку, защищая их от загрязнения и предотвращая их поперечное смещение под действием боковых ударов, толчков и т.п.
Как это видно из сказанного и фиг.29 и 30, упругая опора выполняет функцию на только упругого элемента подвески, но также и демпфера колебаний.
Как указывалось ранее, движитель может работать как при выключенном, так и при включенном фиксаторе 44 устройства прямолинейного движения. Выше была рассмотрена его работа при выключенном фиксаторе.
Переключение фиксатора 44 из выключенного состояния во включенное производят путем поднятая стержня 81 /фиг.13/ посредством вытяжного кольца 84, его поворота относительно геометрической оси этого стержня и опускания штифта 86 в длинный вертикальный участок Г-образной прорези 80.
Процесс фиксирования можно условно разделить на три фазы /фиг.31, 32 и 33/. При этом предполагается, что ступица расположена слева, корневое колено 29 неподвижно, а колена промежуточное 30 и оконечное 31 движутся в направлении к ступице, т.е. влево. В первой фазе /фиг.31/ фиксирующий конус 83 под действием расположенной над ним пружины опускается и, прижимаясь к нагружной поверхности поступательно движущегося промежуточного колена 30, скользит по ней. Во второй фазе /фиг.32/ фиксирующий конус 83 соскальзывает по наклонной торцевой стенке продольной прорези 42 в промежуточное колено 30 и упирается наружную поверхность поступательно движущегося оконечного колена 31, скользя по ней. В третьей фазе /фиг.33/ фиксирующий конус 83 западает в подошедшее под него коническое углубление 43 в оконечном колене 31, фиксируя его, а вместе с ним и весь телескоп в заданном положении, а весь движитель в заданной конфигурации. Процесс фиксирования был рассмотрен для случая движения колен телескопа справа налево, т.е. для случая его сжатия. Однако он аналогичен и при движении колен слева направо, т.е. для случая расширения телескопа. В любом случае некоторые фазы могут выпадать, например если конус 83 фиксатора сразу же попадает в продольную прорезь, то выпадает первая фаза. Если же конус, прорезь и коническое углубление случайно оказывается на одной прямой, то процесс фиксирования происходит одноразово.
При включенном фиксаторе квадратная /фиг.3/ конфигурация фиксируется автоматически, причем как на стоянке, так и в движении. Такая конфигурация с нескругленным обводом предназначается, например, для движения по песку, преодоления ям и т.п.
При фиксировании на стоянке используется то обстоятельство, что пружины на всех телескопах должны быть подтянуты так, чтобы создавать практически одинаковое усиление. Тогда при отделении движителя от грунта, например путем приподнимания несущего его балансира, пружины автоматически растягивают многозвенник до квадратной конфигурации, а фиксатор, действуя аналогично заделке /собачке/, автоматически стопорит телескоп, удерживая весь четырехзвенник в этой конфигурации. Если фиксирования не происходит, то достаточно подтянуть или ослабить пружину на соответствующем телескопе с помощью гайки 47 на его оконечном колене /например, посредством динамометрического ключа/. Для отделения движителя от грунта можно также подкопать грунт под движителем или поставить машину так, чтобы фиксируемый движитель оказался над достаточно глубокой выемкой в грунте.
При фиксировании в движении поступают так. Если места на дороге достаточно, то двигают машину вперед /или назад/ до тех пор, пока движитель не придет в квадратную конфигурацию, а фиксатор автоматически не сработает. Если нет места недостаточно, то маневрируют машиной вперед-назад, пока не произойдет то же самое. В обоих случаях фиксаторы можно подготовить к срабатыванию одновременно на нескольких или на всех движителях машины и тогда они автоматически зафиксируются по мере их прихода в квадратную конфигурацию. Перед подготовкой движителя к фиксированию доступ к фиксатору открывают, повернув манжеты 70 и 71 сильфона, сняв их со штифтов и подняв /опустив/ сильфон. По окончании фиксирования сильфон возвращают на место в обратном порядке.
Фиксированная квадратная конфигурация с упругими опорами, обращенными к ступице, с образованием круглого обвода /фиг.4/ предназначена для движения по дороге. Перевод движителя из внедорожного режима в дорожный производят поворотом секции в описанном ранее порядке. К шарнирам 7, 8, 9 и 10 прикрепляют угловые скругленные шинные секции, например 19. Способ прикрепления понятен из фиг. 11, 12 и 14. Крепежный болт 89 пропускают через проушину 73 на секции 19, полый палец 88 с надетыми на него проушинами вилки 49 и стержней 3 и 4, другую проушину /не обозначена/ этой же секции, и закрепляют упругой шайбой 90 и гайкой 91. После такого перевода движитель работает как обычное круглое колесо.
В данном описании рассмотрен фиксатор, встроенный в телескоп. Но фиксатор, например съемный, может быть расположен и вне его. Поэтому формула изобретения относится к фиксатору любой конструкции и с любым месторасположением относительно указанного телескопа.
Движитель по второму примеру практического осуществления изобретения отличается от движителя по первому примеру, в числе прочего отсутствием всех фиксаторов. Его работа аналогична работе движителя по первому примеру с выключенным фиксатором устройства прямолинейного движения /первый и четвертый режимы/ и потому далее подробно не рассматривается. Здесь /фиг.34, 35, 36 и 37/ по-другому выполнены звенья 94, 95, 96 и 97, а также упругие опоры 98, 99, 100 и 101, каждая из которых закреплена на поддерживающем ее жестком основании /см. далее/ с образованием шинных секций 102, 103, 104 и 105. Как это показано на фиг.38, звено /например, 95/ выполнено в виде прямоугольной в плане металлической пластины /или рамы/ 106 с прямоугольным вырезом 107 в средней ее части, с проушинами 108, 109 и 110 по торцам и с основными грунтозацепами, например, 111. Оно снабжено разъемными соединительными /крепежными/ устройствами, например шпильками 112 с упругими шайбами и с гайками /не показано/. На нем предусмотрены ребра жесткости и/или упрочняющие отгибы, например 113 и 114.
Как это показано на фиг.39 и 40, шинная секция, например 103, выполнена в виде жесткого основания 115 с закрепленной на нем упругой шинной накладкой /опорой/ 99. Эта накладка является частным случаем упругой опоры; здесь она выполнена в виде резинового блока, но может быть выполнена также в виде секции бескамерной пневматической шины.
Ходовые поверхности указанных основания и накладки обращены во взаимно противоположные стороны. Жесткое основание выполнено в виде прямоугольной в плане пластины или рамы /не обозначена/ с дополнительными грунтозацепами, например, шпорами 116. В пластине имеются круглые отверстия, например 117, под шпильки и прямоугольное вырезы, например 118, под шпоры. Рядом со шпильками 112 могут быть установлены приводочные штифты /не показано/, например вставные, а в жестком основании 115 выполнены ответные для них отверстия /не показаны/. Эти штифты и отверстия предназначены для точной посадки пластины или рамы на шпильки 112 без повреждения резьбы на последних. Жесткость пластины обеспечена ребрами 119 и выдавленными в металле каналами 120. В шинной накладке имеются протекторные канавки, например 121, и две открытые продольное канавки 122 и 123 переменной глубины для частичного размещения в них устройств прямолинейного движения /см. также фиг.8/. Устройство канавок и их использование были описаны ранее, применительно к первому примеру практического осуществления изобретения. Там же были описаны устройство и способ крепления шиной накладки. В данном примере вместо шпилек может быть использован быстродействующий шарнирно-рычажный захват /например, по авт. свид. СССР 1152859, кл. МКИ В 62 Д 52/28, 1982/.
Движитель по второму примеру работает в попеременном колесно-гусеничном режиме с упругими опорами, обращенными от ступицы /фиг.34, свободная ромбическая конфигурация многозвенника, движение по дороге/ или к ступице /фиг.37, свободная ромбическая конфигурация многозвенника, движение по местности/. В любом случае он периодически принимает свободную квадратную конфигурацию /фиг. 36/. Механическое взаимодействие упругих опор между собой и/или с устройствами прямолинейного движения в данном примере такое же, как и в первом, при выключенном фиксаторе 44 устройства 26 прямолинейного движения.
В рабочее положения для движения по дороге /фиг.34/ движитель приводят при его нахождении в любой конфигурации. Секции 104 и 105 располагают с наружной стороны многозвенника, ориентируют их так, чтобы их упругие опоры /соответственно 100 и 101/ были обращены от ступицы, насаживают их сверху, в радиальном относительно геометрической оси ступицы направлении, на шпильки 112 /например, с использованием приводочных штифов/, накладывают упругие шайбы и гайки и затем последние затягивают. Затем переводят движитель в аналогичное положение, удобное для закрепления остальных секций, закрепляют последние. Процесс протекает без сопротивления со стороны ранее установленных секций 104 и 105.
Иначе обстоит дело при приведении секций движителя в рабочее положение для движения по местности /фиг.37/. При этом все секции поочередно переворачивают на 180о и устанавливают их на те же звенья сверху, в направлении к ступице. При этом вновь устанавливаемые упругие опоры оттесняются ранее установленными и/или телескопами /например, вновь устанавливаемая опора 101 оттесняется ранее установленными опорами 98 и 100, а также связанными с ней телескопами/. Противодействие телескопов устраняется в случае наличия на упругих опорах канавок переменной глубины. Противодействие опор компенсируют дополнительной затяжкой гаек на шпильках 112, причем сочетание шпилек с гайками выполняет функцию нажимных устройств. Требуемое положение основания 115 относительно звена 95, и тем самым упругость опоры, можно регулировать с помощью надеваемых на шпильки распорных втулок /не показаны/соответствующей длины. Для ослабления такого оттеснения секции устанавливают при квадратной конфигурации многозвенника.
Работа движителя на дороге и на местности в основном аналогична его работе по первому примеру в такой же конфигурации и потому не рассматривается.
Хотя в движителе по первому примеру упругая опора выполенена скругленной, а по второму плоской, это не обязательно, может быть и наоборот. Возможны и другие видоизменения, подпадающие под действие формулы.
Управление машиной, оборудованной данным движителем, производится притормаживанием /или ускорением/ движителей одного борта.
Движитель по первому примеру может быть использован, например, в машинах с затрудненным доступом к секциям сверху /для перевода движителя из дорожной конфигурацией во внедорожную наоборот/, например, расположенными в нишах корпуса, а по второму - в машинах со свободным доступом, например, с расположением движителей сбоку корпуса.
В обоих примерах при практическом использовании изобретения возникает проблема постановки данного движителя на полуось в существующих автомобилях, колесных тракторах и т.п., в которых узел крепления движителя рассчитан на стандартное дисковое колесо с шестью крепежными отверстиями. Если на полуоси нет тормозного барабана, то данный движитель устанавливают на ней непосредственно своей ступицей, по фиг.1. Если на полуоси имеется тормозной барабан, то вместо установленных на нем шести крепежных шпилек располагают четыре, а ступицу выполняют с фланцем на четыре крепежных отверстия.
В качестве иллюстрации к первому примеру практического осуществления изобретения на фиг. 41 показан автомобиль с движителями на балансирах при движении по дороге, на фиг.42 - он же, при движении по пересеченной местности, а на фиг.43 - он же, при движении по болотистому грунту. Хотя здесь показан автомобиль с балансирной подвеской, движитель может быть использован и на обычных городских автомобилях со штатной /например, свечной или на полуэллиптических рессорах/ подвеской, предназначенных для кратковременных выездов на местность /охота, рыбалка и т.д./. Некоторые неудобства при езде по пересеченной местности компенсируется их кратковременностью и высокой проходимостью машины.
Движители, установленные на одной и той же машине, могут быть зафиксированы и расфиксированы в самых разнообразных сочетаниях, что позволяет приспосабливать их к различным дорожным условиях. Если все движители расфиксированы, то машина является колесно-гусеничной /в том смысле, что движитель периодически и автоматически переходит с некруглоколесного режима на гусеничный и обратно/. Если все движители зафиксированы с многозвенниками в квадратной конфигурации, а упругие опоры обращены от ступицы, то машина является чисто колесной, если все движители зафиксированы с многозвенниками в квадратной конфигурации, но упругие опоры обращены к ступице, то машина является чисто шагающей. При этом в ней обеспечивается плавность хода даже при движении по пересеченной местности. Если часть движителей зафиксирована, а часть расфиксирована, то машина является колесно-гусенично-шагающей.
Как видим, движитель экологически чист, легок, прост по конструкции, надежен в работе, удобен в эксплуатации и может работать практически в любом ходовом режиме, обеспечивая достаточную плавность хода на местности, высокие скорость и проходимость, а оборудованная им машина является действительно вездеходом.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВИЖИТЕЛЬ ТРАНСПОРТНОГО СРЕДСТВА | 1987 |
|
RU2031039C1 |
| ДВИЖИТЕЛЬ ТРАНСПОРТНОГО СРЕДСТВА | 1997 |
|
RU2124449C1 |
| КОЛЕСО С ИЗМЕНЯЕМОЙ КОНФИГУРАЦИЕЙ ОБВОДА | 1999 |
|
RU2152880C1 |
| КОЛЕСО С ИЗМЕНЯЕМОЙ КОНФИГУРАЦИЕЙ ОБВОДА | 2004 |
|
RU2268823C1 |
| Колесо с изменяемой конфигурацией обвода | 1982 |
|
SU1088955A1 |
| САМОХОДНОЕ КРЕСЛО ДЛЯ ИНВАЛИДОВ | 1991 |
|
RU2033125C1 |
| ШАССИ ДЛЯ ПЕРЕДВИЖЕНИЯ ПО РАЗЛИЧНЫМ ОПОРНЫМ ПОВЕРХНОСТЯМ С КОЛЕСНО-ШАГОВЫМИ ДВИЖИТЕЛЯМИ | 2015 |
|
RU2628285C2 |
| Сменный гусеничный движитель колесного транспортного средства | 2017 |
|
RU2652282C1 |
| ПОЧВООБРАБАТЫВАЮЩИЙ ПОСЕВНОЙ АГРЕГАТ | 2009 |
|
RU2414112C1 |
| КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ С ФУНКЦИЕЙ АКТИВНОЙ ПОДВЕСКИ | 2017 |
|
RU2671661C1 |















Изобретение предназначено для использования в транспортных средствах высокой проходимости. Движитель содержит ступицу с ее геометрической осью, плоский замкнутый многозвенник в виде четырех шарнирами соединенных звеньев одинаковой длины и четыре устройства прямолинейного движения. Каждое из последних одним своим концом жестко соединено со ступицей, а другим своим концом соединено с ближайшим к нему шарниром. На каждом звене расположено упругое опорное устройство с его ходовой поверхностью. Указанные звено и/или упругое опорное устройство выполнены с возможностью позиционирования и удержания последнего в положении обращенности его ходовой поверхности к ступице, а само указанное упругое опорное устройство выполнено с возможностью его по меньшей мере частичного расположения в пространстве между ближайшими к нему указанными устройствами прямолинейного движения. В результате повышается плавность движения транспортного средства по пересеченной местности. 10 з.п.ф-лы, 43 ил.
| ДВИЖИТЕЛЬ ТРАНСПОРТНОГО СРЕДСТВА | 1997 |
|
RU2124449C1 |
| ДВИЖИТЕЛЬ ТРАНСПОРТНОГО СРЕДСТВА | 1987 |
|
RU2031039C1 |
| Устройство для обнаружения аварийных ситуаций при бурении скважин | 1974 |
|
SU713978A1 |

