Известен способ определения координат точки падения боеприпаса, в описании изобретения к патенту №2516205, МПК F41J 5/00, от 27.03.2012, опубл. 20.05.2014, основанный на установке по периметру испытательного полигона сейсмических регистраторов, приеме и анализе параметров сейсмических колебаний, определении координат точки удара боеприпаса о грунт - эпицентра сейсмических колебаний по их параметрам, отличающийся тем, что дополнительно устанавливают по периметру испытательного полигона оптико-электронные пеленгаторы, принимают рассеянное атмосферным каналом распространения оптическое излучение источника - факела взрыва боеприпаса, измеряют значения углов пеленгов на источник оптического излучения - факел взрыва боеприпаса и определяют координаты точки падения боеприпаса по координатам точки пересечения линий пеленгов.
Недостатком использования данного способа для определения координат точки падения макета боеприпаса является недостаточная точность определения координат точки падения макета боеприпаса, обусловленная отсутствием в момент удара макета боеприпаса о грунт излучения и сейсмических колебаний.
Наиболее близким к предлагаемому способу является способ определения координат точки падения боеприпаса на основе инструментального обмера [Министерство Обороны Российской Федерации. Приказ от 25 октября 2001 года N 431 «Об утверждении Федеральных авиационных правил по организации полигонной службы в государственной авиации. Зарегистрировано в Министерстве юстиции Российской Федерации 21 марта 2002 года, регистрационный номер 3318], заключающийся в том, что в точку падения боеприпаса устанавливают дальномерную рейку, из центра мишени измеряют азимут на установленную рейку, измеряют угловые размеры рейки, пересчитывают угловой размер в дальность до установленной рейки [см, Подшивалов, В.П., М.С. Нестеренок. Инженерная геодезия: учебник / Минск: Выш. шк., 2011 г., с. 116 и 139].
Недостатком использования данного способа для определения координат точки падения боеприпаса является недостаточная точность определения координат точки падения боеприпаса средствами оптического измерения и ошибками оператора при визуальном наблюдении.
Техническим результатом изобретения является повышение точности определения координат точки падения макета боеприпаса.
Технический результат в способе определения координат точки падения макета боеприпаса достигается за счет того, что на бомбардировочную мишень сбрасывают макет боеприпаса, затем на площадку в центр бомбардировочной мишени устанавливают лазерное измерительное устройство, а в центр точки падения макета боеприпаса устанавливают отражатель, поворачивают лазерное измерительное устройство вокруг своей вертикальной оси и ориентируют его на центр отражателя и излучают зондирующий лазерный сигнал, который отражается на лазерное измерительное устройство, с помощью которого принимают отраженный лазерный сигнал и измеряют временной интервал между излучением зондирующего и приемом отраженного лазерного сигнала, при этом в лазерном измерительном устройстве автоматически происходит пересчет измеренного временного интервала в линейную величину, а измеренное значение дальности отображается на встроенном в устройство индикаторе.
Сущность изобретения заключается в измерении временного интервала между излучением зондирующего сигнала из центра мишени и регистрации отраженного сигнала от отражателя, размещенного в точке падения макета боеприпаса, с последующим пересчетом в линейную величину.
Сопоставительный анализ заявляемого решения с прототипом позволяет сделать вывод, о том, что заявляемое изобретение отвечает условиям патентоспособности: является новым, имеет изобретательский уровень и промышленно применимо.
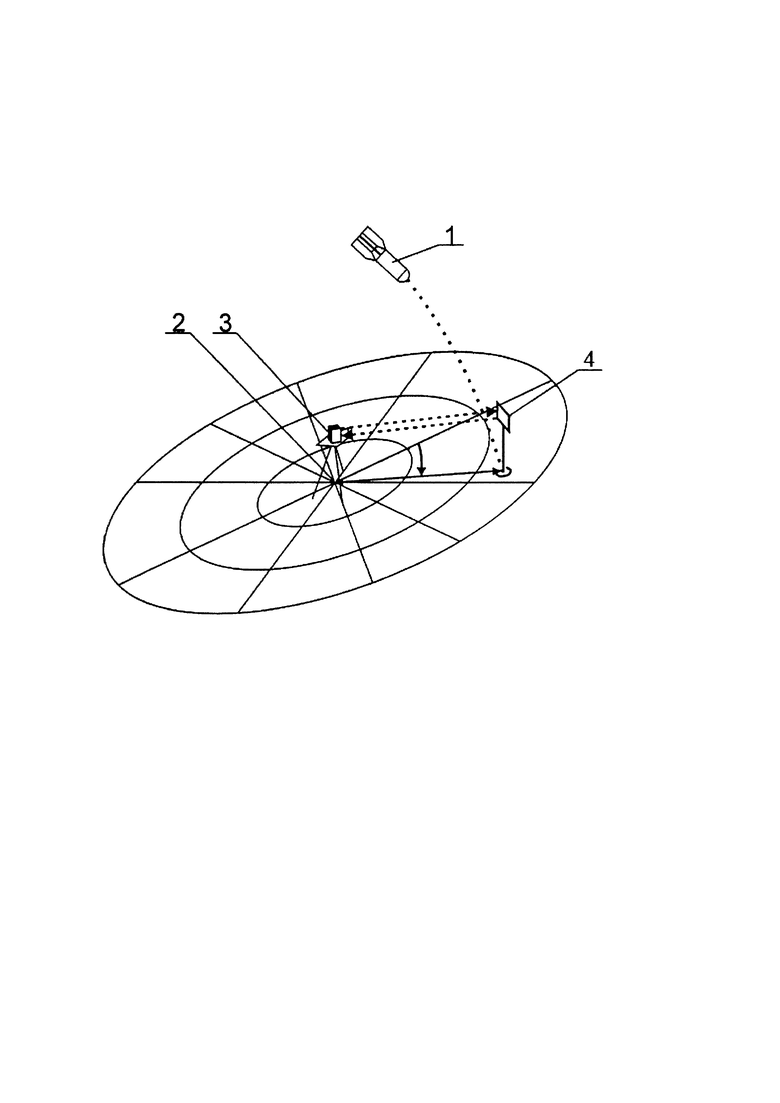
Способ определения координат точки падения макета боеприпаса поясняется следующим чертежом:
на фиг. 1 изображен способ определения координат точки падения макета;
Заявляемый способ осуществляется следующим образом.
Макет боеприпаса 1 сбрасывают на бомбардировочную мишень. В центр бомбардировочной мишени на площадку 2 устанавливают лазерное измерительное устройство 3. В качестве такого устройства может быть использован лазерный дальномер, лазерная рулетка, тахеометр. Если для определения дальности до точки падения макета боеприпаса применяется лазерный дальномер или лазерная рулетка, то для вычисления азимута точки падения макета боеприпаса, необходимо использовать теодолит или геодезическую буссоль. Тахеометр позволяет определять обе координаты точки падения макета боеприпаса (и азимут и дальность) одновременно.
В центр точки падения макета боеприпаса 1 устанавливают отражатель 4. В качестве отражателя 4 может быть использована триппель-призма или отражатель с маркой. Путем поворота лазерного измерительного устройства 3 вокруг своей вертикальной оси ориентируют его по направлению на центр отражателя 4. Из лазерного измерительного устройства 3 излучают зондирующий лазерный сигнал на отражатель 4. Излученный сигнал отражается от отражателя 4 на лазерное измерительное устройство 3. С помощью лазерного измерительного устройства 3 принимают отраженный лазерный сигнал и измеряют временной интервал между излучением зондирующего и приемом отраженного лазерного сигнала. В лазерном измерительном устройстве 3 автоматически происходит пересчет измеренного временного интервала в линейную величину дальности по формуле:

где υ - средняя скорость электромагнитной волны в воздушной среде, м/с; τ - измеренное время между излучением и приемом лазерного сигнала, с; N - число импульсов, автоматически определяемое в устройстве за время прохождения световым лучом двойного расстояния 2Д; f - частота следования импульсов, Гц. Измеренное значение дальности отображается на встроенном в устройство 3 индикаторе. Пример 1.
Макет боеприпаса 1 сбрасывают на бомбардировочную мишень. В центр бомбардировочной мишени на площадку 2 устанавливают лазерный дальномер 3. В центр точки падения макета боеприпаса 1 устанавливают триппель-призму 4. Лазерный дальномер 3, вращением вокруг своей вертикальной оси, ориентируют по направлению на центр триппель-призмы 4. Включают устройство в работу, при этом из лазерного дальномера 3 излучается зондирующий лазерный сигнал в центр триппель-призмы 4, отражается от нее в обратную сторону. С помощью лазерного дальномера 3 принимают отраженный лазерный сигнал. В лазерном дальномере 3 происходит автоматическое измерение временного интервала между излучением зондирующего и приемом отраженного лазерного сигнала, с последующим пересчетом по формуле (1) измеренного временного интервала в линейную величину дальности. На встроенном в лазерный дальномер 3 индикаторе отображается измеренное значение дальности до точки падения макета боеприпаса 15,437 м. Значение азимута точки падения макета боеприпаса 226° определяют с помощью теодолита. Пример 2.
Макет боеприпаса 1 сбрасывают на бомбардировочную мишень. В центр бомбардировочной мишени на площадку 2 устанавливают тахеометр 3. В центр точки падения макета боеприпаса 4 устанавливают отражатель с маркой 4. Тахеометр 3, вращением вокруг своей вертикальной оси, ориентируют по направлению на центр отражателя с маркой 4. Включают устройство в работу, при этом из тахеометра 3 излучается зондирующий лазерный сигнал в центр отражателя с маркой 4, отражается от нее в обратную сторону. С помощью тахеометра 3 принимают отраженный лазерный сигнал. В тахеометре 3 происходит автоматическое измерение временного интервала между излучением зондирующего и приемом отраженного лазерного сигнала, с последующим пересчетом по формуле (1) измеренного временного интервала в линейную величину дальности. На встроенном в тахеометр 3 индикаторе отображается измеренное значение азимута и дальности до точки падения макета боеприпаса азимут - 146°, дальность - 6,762 м.
Использование заявляемого изобретения позволит повысить точность определения координат точки падения макета боеприпаса.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ТОЧКИ ПАДЕНИЯ МАКЕТА БОЕПРИПАСА ЛАЗЕРНЫМ ИЗМЕРИТЕЛЬНЫМ УСТРОЙСТВОМ | 2019 |
|
RU2708705C1 |
| ЛАЗЕРНЫЙ ЦЕЛЕУКАЗАТЕЛЬ-ДАЛЬНОМЕР | 2012 |
|
RU2522784C1 |
| Импульсный лазерный дальномер | 2021 |
|
RU2756783C1 |
| Лазерный дальномер | 2021 |
|
RU2756381C1 |
| ИНТЕРФЕРЕНЦИОННОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ФАЗОВОГО СДВИГА СВЕТОВЫХ ВОЛН | 1996 |
|
RU2112210C1 |
| Лазерный дальномер с пробным излучателем | 2021 |
|
RU2756782C1 |
| СПОСОБ ИМИТАЦИИ СТРЕЛЬБЫ | 1997 |
|
RU2109245C1 |
| Способ формирования объектов имитируемой модели фоноцелевой обстановки на необитаемой территории ледового пространства | 2021 |
|
RU2816461C2 |
| СПОСОБ РЕГИСТРАЦИИ СТАТИСТИЧЕСКОГО РАСПРЕДЕЛЕНИЯ ПЕРЕОТРАЖЕНИЙ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ ОТ НИЗКОЛЕТЯЩЕЙ РАКЕТЫ БЛИКАМИ МОРСКОЙ ПОВЕРХНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2451301C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ИЗДЕЛИЙ И ЦЕЛЕВОЙ ЗНАК ДЛЯ ОПРЕДЕЛЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ИЗДЕЛИЙ | 2000 |
|
RU2202101C2 |
Изобретение относится к способам проведения испытаний огневых комплексов, в частности для оценки точности попадания в цель макета боеприпаса. Для определения координат точки падения макета боеприпаса (1) на бомбардировочную мишень сбрасывают макет боеприпаса (1), на площадке (2) в центре бомбардировочной мишени устанавливают лазерное измерительное устройство (3), в центр точки падения макета (1) устанавливают отражатель (4), поворачивают лазерное измерительное устройство (3) вокруг своей вертикальной оси, ориентируют его на центр отражателя (4) и излучают зондирующий лазерный сигнал. С помощью лазерного измерительного устройства (3) принимают отраженный лазерный сигнал и измеряют временной интервал между излучением зондирующего и приемом отраженного лазерного сигнала. В лазерном измерительном устройстве (3) автоматически происходит пересчет измеренного временного интервала в линейную величину, а измеренное значение дальности отображается на индикаторе. Обеспечивается повышение точности определения координат точки падения макета боеприпаса, в том числе при отсутствии в момент удара макета боеприпаса о грунт излучения и сейсмических колебаний. 1 ил.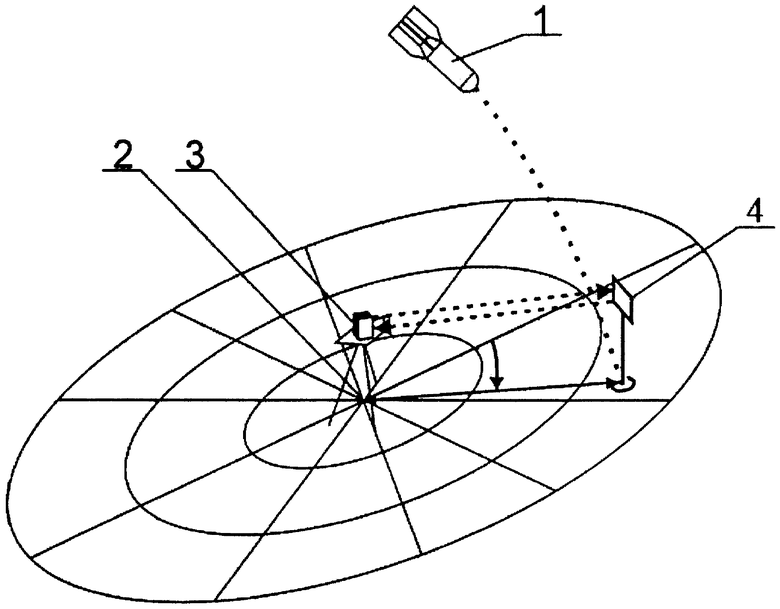
Способ определения координат точки падения макета боеприпаса, отличающийся тем, что на бомбардировочную мишень сбрасывают макет боеприпаса, затем на площадку в центр бомбардировочной мишени устанавливают лазерное измерительное устройство, а в центр точки падения макета боеприпаса устанавливают отражатель, поворачивают лазерное измерительное устройство вокруг своей вертикальной оси, ориентируют его на центр отражателя и излучают зондирующий лазерный сигнал, с помощью лазерного измерительного устройства принимают отраженный лазерный сигнал и измеряют временной интервал между излучением зондирующего и приемом отраженного лазерного сигнала, при этом в лазерном измерительном устройстве автоматически происходит пересчет измеренного временного интервала в линейную величину, а измеренное значение дальности отображается на индикаторе.
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ТОЧКИ ПАДЕНИЯ БОЕПРИПАСА | 2012 |
|
RU2516205C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПАДЕНИЯ БОЕПРИПАСОВ | 2014 |
|
RU2593523C2 |
| ОХРАННАЯ СИСТЕМА | 2020 |
|
RU2751756C1 |
| СИСТЕМА АДДИТИВНОГО ПРОИЗВОДСТВА С АДРЕСУЕМЫМ МАССИВОМ ЛАЗЕРОВ И УПРАВЛЕНИЕМ С ОБРАТНОЙ СВЯЗЬЮ В РЕАЛЬНОМ ВРЕМЕНИ КАЖДЫМ ИСТОЧНИКОМ | 2019 |
|
RU2793043C2 |
| US 4333106 A, 01.06.1982. | |||

