ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к магнитно-резонансной системе исследования с подвижным держателем пациента.
УРОВЕНЬ ТЕХНИКИ, К КОТОРОМУ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Магнитно-резонансная система исследования с подвижным держателем пациента известна из международной заявки на патент WO2013/153493.
Способы магнитно-резонансной визуализации (magnetic resonance imaging - MRI) используют взаимодействие между магнитными полями и ядерными спинами для формирования двумерных или трехмерных изображений, которые широко используются в настоящее время, в частности, в области медицинской диагностики, поскольку в визуализации мягкой ткани они во многих отношениях превосходят другие способы визуализации, не требуют ионизирующего излучения и обычно являются неинвазивными.
Согласно MRI-способу, в общем, тело пациента, подлежащего исследованию, располагают в сильном, однородном магнитном поле B0, чье направление в то же время определяет ось (обычно ось z) системы координат, с которой связано измерение. Магнитное поле B0 обусловливает разные энергетические уровни для отдельных ядерных спинов в зависимости от напряженности магнитного поля, которые могут быть возбуждены (спиновой резонанс) посредством приложения электромагнитного переменного поля (радиочастотного (RF) поля) определенной частоты (так называемой ларморовой частоты или MR-частоты). С макроскопической точки зрения, распределение отдельных ядерных спинов создает общую намагниченность, которая может быть смещена из состояния равновесия посредством приложения электромагнитного импульса подходящей частоты (RF-импульса), в то время как соответствующее магнитное поле B1 этого RF-импульса продолжается перпендикулярно оси z, так что намагниченность осуществляет прецессионное движение вокруг оси z. Прецессионное движение описывает поверхность конуса, чей угол апертуры называется углом отклонения вектора намагниченности. Величина угла отклонения вектора намагниченности зависит от напряженности и длительности приложенного электромагнитного импульса. В примере так называемого 90° импульса, намагниченность смещается от оси z в поперечную плоскость (угол отклонения вектора намагниченности составляет 90°).
После прекращения RF-импульса, намагниченность релаксирует назад в исходное состояние равновесия, в котором намагниченность в направлении z снова увеличивается с первой постоянной T1 времени (время спин-решеточной релаксации или время продольной релаксации), а намагниченность в направлении, перпендикулярном направлению z, релаксирует со второй и меньшей постоянной T2 времени (время спин-спиновой релаксации или время поперечной релаксации). Поперечная намагниченность и ее изменение могут быть детектированы посредством приемных RF-антенн (массивов катушек), которые расположены и сориентированы внутри исследуемого объема магнитно-резонансной системы исследования таким образом, что изменение намагниченности измеряется в направлении, перпендикулярном оси z. Ослабление поперечной намагниченности сопровождается дефазированием, имеющим место после RF-возбуждения, вызванного локальными неоднородностями магнитного поля, обеспечивающим переход из упорядоченного состояния с одной и той же фазой сигнала в состояние, в котором все фазовые углы распределены однородно. Дефазирование может быть скомпенсировано посредством перефокусирующего RF-импульса (например, 180° импульс). Это создает эхо-сигнал (спиновое эхо) в приемных катушках.
Для достижения пространственного разрешения в визуализируемом объекте, таком как пациент, подлежащий исследованию, градиенты магнитного поля, продолжающиеся вдоль трех основных осей, накладываются на однородное магнитное поле В0, что приводит к линейной пространственной зависимости частоты спинового резонанса. Сигнал, принятый в приемных антеннах (массивах катушек), содержит тогда компоненты разных частот, которые могут быть связаны с разными местоположениями в теле. Данные сигнала, полученные через приемные катушки, соответствуют пространственно-частотной области волновых векторов магнитно-резонансного сигнала и называются данными k-пространства. Данные k-пространства обычно включают множество линий, полученных из кодирования разных фаз. Каждая линия преобразуется в цифровую форму путем сбора некоторого количества образцов из k-пространства. Набор данных k-пространства конвертируют в MR-изображение посредством преобразования Фурье.
Поперечная намагниченность дефазируется также в присутствии постоянных градиентов магнитного поля. Этот процесс может быть реверсирован, подобно образованию RF-возбуждаемых (спиновых) эхо, посредством подходящего реверсирования градиентов, образующего так называемое градиентное эхо. Однако, в случае градиентного эха, эффекты неоднородностей основного поля, химический сдвиг и другие нерезонансные эффекты не перефокусируются, в отличие от RF-перефокусированного (спинового) эха.
Известная магнитно-резонансная система исследования имеет основной магнит с зазором, который обеспечивает область исследования. RF-антенна установлена неподвижно в зазоре. Верхняя часть стола пациента обеспечена таким образом, чтобы пациент находился в зазоре во время MR-исследования. Положение верхней части стола пациента относительно RF-антенны является настраиваемым для приближения пациента к RF-антенне.
Патент США US 4 629 989 имеет отношение к проблеме позиционирования пациента, подлежащего исследованию, в оптимальной однородной области поляризующего магнитного поля. С этой целью известная система выравнивания пациента использует источники лазерного света для создания видимой опорной точки. Система продольных приводов может перемещать опору пациента головой вперед или ногами вперед.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Целью настоящего изобретения является обеспечение магнитно-резонансной системы исследования, в которой положение пациента, подлежащего исследованию, может быть лучше настроено в статическом магнитном поле магнитно-резонансной системы исследования.
Эта цель достигается в магнитно-резонансной системе исследования настоящего изобретения, содержащей
- зону исследования
- магнит для приложения статического магнитного поля в зоне исследования
- держатель пациента с опорной поверхностью
- RF-антенну, имеющую фиксированное геометрическое отношение с опорной поверхностью, причем
- держатель пациента установлен подвижно в направлении, поперечном к опорной поверхности.
В магнитно-резонансной системе исследования RF-антенна для приема магнитно-резонансного сигнала от пациента, подлежащего исследованию, расположена в фиксированном геометрическом отношении с пациентом, подлежащим исследованию. В зоне исследования прикладывается статическое магнитное поле, и может быть сгенерировано поле RF-возбуждения, например, посредством RF-антенны, работающей в режиме передачи или посредством отдельной передающей антенны. Часть тела пациента, подлежащего исследованию, помещают в зону исследования, где RF-возбуждение может быть применено к спинам в теле пациента, и может быть получен (собран) магнитно-резонансный сигнал от тела пациента. Посредством установки RF-антенны на держателе пациента или посредством размещения RF-антенны на теле пациента, подлежащего исследованию, RF-антенна для приема магнитно-резонансного сигнала располагается в фиксированном геометрическом отношении с пациентом, подлежащим исследованию. Это обеспечивает оптимальное расстояние между RF-антенной и телом пациента, подлежащего исследованию, для сбора магнитно-резонансных сигналов. Поскольку держатель пациента является подвижным поперечно к опорной поверхности держателя пациента, положение интересующей области тела пациента, подлежащего исследованию, может быть лучше настроено в области очень хорошей пространственной однородности статического магнитного поля. В этой области хорошей пространственной однородности, основное магнитное поле имеет высокую степень пространственной однородности, и, предпочтительно, также градиентные магнитные поля имеют по большей мере очень малое отклонение от линейности. Опорная поверхность является поверхностью, на которой размещено тело пациента на держателе пациента. Например, пациент может быть размещен прямо на верхней части стола, или пациент может быть размещен на тонком матраце, который размещен на верхней части стола. В этих примерах опорная поверхность образована поверхностью верхней части стола. Магнитно-резонансное изображение, восстановленное из собранного (полученного) магнитно-резонансного сигнала, имеет высокое качество изображения и имеет низкий уровень артефактов вследствие пространственных неоднородностей статического магнитного поля, поскольку интересующая область точно размещена в области очень хорошей пространственной однородности статического магнитного поля. Перемещение, поперечное к опорной поверхности, является обычно вертикальным. Следовательно, точное размещение интересующей области в пределах области пространственной однородности обеспечено независимо от размера тела пациента. Согласно этому изобретению, при исследовании (визуализации) худого пациента, держатель пациента может быть перемещен вертикально для оптимального позиционирования этого худого пациента в области однородности. При исследовании (визуализации) полного пациента, держатель пациента опускают для оптимального позиционирования этого полного пациента в области однородности. Дополнительно, держатель пациента может быть подвижным вдоль его продольной оси, обычно для перемещения пациента, подлежащего исследованию, в зону исследования магнитно-резонансной системы исследования и из нее. Держатель пациента может быть также подвижным в опорной поверхности, поперечно к продольной оси, т.е. обычно вбок, для позиционирования интересующей области точно в области пространственной однородности. Таким образом, необязательно держатель пациента является подвижным как вертикально, так и горизонтально.
Опорная поверхность является внешней поверхностью держателя пациента, на которой размещается пациент, подлежащий исследованию, при подготовке и во время исследования в зоне исследования. Держатель пациента со своей опорной внешней поверхностью (которая может быть его неотъемлемой частью) является подвижным в направлении, поперечном к опорной внешней поверхности; т.е. вдоль нормали к опорной внешней поверхности. А именно, держатель пациента определяет свою собственную систему координат продольного и бокового направлений, которые находятся в опорной поверхности, а поперечное направление является нормальным к опорной поверхности. Согласно настоящему изобретению, держатель пациента установлен таким образом, что он может быть перемещен (в направлении относительно своей собственной системы отсчета) в поперечном направлении. На практике, продольное направление направлено вдоль продольной оси (удлиненного) держателя пациента, боковое направление направлено вбок, и поперечное направление направлено вдоль вертикальной оси.
Эти и другие аспекты настоящего изобретения будут дополнительно рассмотрены со ссылкой на варианты осуществления, определенные в зависимых пунктах формулы изобретения.
В предпочтительном варианте осуществления магнитно-резонансной системы исследования настоящего изобретения магнит имеет опорную раму и снабжен мостовым элементом, установленным на опорной раме подвижно в направлении, поперечном к опорной поверхности, и, причем, мостовой элемент поддерживает держатель пациента. Мостовой элемент может быть легко установлен подвижно на опорной раме магнита. Альтернативно, мост может быть также установлен на полу помещения или на градиентной катушке или на RF-катушке для тела. Мостовой элемент поддерживает держатель пациента. Следовательно, не нужно адаптировать держатель пациента для обеспечения перемещения, поперечного к опорной поверхности.
В другом варианте осуществления, магнит является магнитом цилиндрической формы с зазором, в котором расположена зона исследования, причем элементы кожуха обеспечены между мостовым элементом или держателем пациента и внутренней стенкой зазора. Элементы кожуха покрывают промежуток между держателем пациента мостового элемента и внутренней стенкой зазора. Таким образом, предотвращается возможность падения объектов через это пространство. Элементы кожуха также предотвращают возможность зажимания в промежутке руки или пальцев присутствующего персонала, которые могут быть защемлены, в частности, этот вариант осуществления является безопасным в том, что предотвращается защемление пальцев между держателем пациента и стенкой зазора. Предпочтительно, элементы кожуха гибко установлены или изготовлены из гибкого материала или образованы из нескольких гибко соединенных элементов кожуха. В другом примере, элементы кожуха могут быть выполнены в виде надувных элементов кожуха. Эти надувные элементы кожуха могут быть надуты до такой степени, чтобы они покрывали промежуток. Это обеспечивает то, что элементы кожуха продолжают покрывать промежуток, в то время как размер промежутка изменяется во время, в частности, перемещения держателя пациента, поперечного к его опорной поверхности. Элементы кожуха могут быть выполнены в виде гибко устанавливаемых покрытий, которые расположены поверх промежутка между мостовым элементом и внутренней стенкой зазора. Эти элементы кожуха могут быть покрытиями из гибкого деформируемого материала или могут быть гибко устанавливаемыми для обеспечения подвижности. Деформация или подвижность позволяет покрыть промежуток, в то время как держатель пациента (несущий пациента, подлежащего исследованию) перемещается в зону исследования или из нее, и обеспечивает плавное перемещение держателя пациента относительно внутренней стенки зазора магнита.
В дополнительном варианте осуществления обеспечена приводная система для управления перемещением держателя пациента, причем приводная система имеет один или несколько исполнительных механизмов для приведения в движение держателя пациента и модуль управления приводами для управления исполнительными механизмами. Это обеспечивает перемещение опоры пациента в ее правильное положение, таким образом, нет необходимости в ручной настройке высоты опоры пациента при транспортировке пациента, подлежащего исследованию. Модуль управления приводами предпочтительно выполнен с возможностью приведения в движение держателя пациента для компенсации перемещения, вызванного сбором магнитно-резонансных сигналов. Это улучшает комфорт пациента, поскольку пациент, подлежащий исследованию, совсем не ощущает никаких вибраций или ощущает их по меньшей мере в меньшей степени, во время сбора магнитно-резонансных сигналов. Это, в частности, достигается, когда модуль управления приводами соединен с контроллером градиентов, для управления перемещением держателя пациента для компенсации перемещения вследствие переключения градиентного магнитного поля. Таким образом, вибрации, которые генерируются переключением градиентов, компенсируются перемещением держателя пациента и не передаются на тело пациента, подлежащего исследованию.
Альтернативно, модуль управления приводами может функционировать для преднамеренной независимой подачи вибраций на опору пациента и на тело пациента, подлежащего исследованию. Это позволяет выполнить MR-эластографию без необходимости отдельного генератора для возбуждения материальных волн в теле пациента, подлежащего исследованию.
Эти и другие аспекты настоящего изобретения будут разъяснены со ссылкой на варианты осуществления, описанные ниже, и со ссылкой на сопутствующие чертежи.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 схематично показывает магнитно-резонансную систему визуализации, в которой используется настоящее изобретение;
Фиг. 2 показывает вид спереди магнитно-резонансной системы визуализации, в которой используется настоящее изобретение; и
Фиг. 3 показывает вид сбоку магнитно-резонансной системы визуализации, в которой используется настоящее изобретение.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
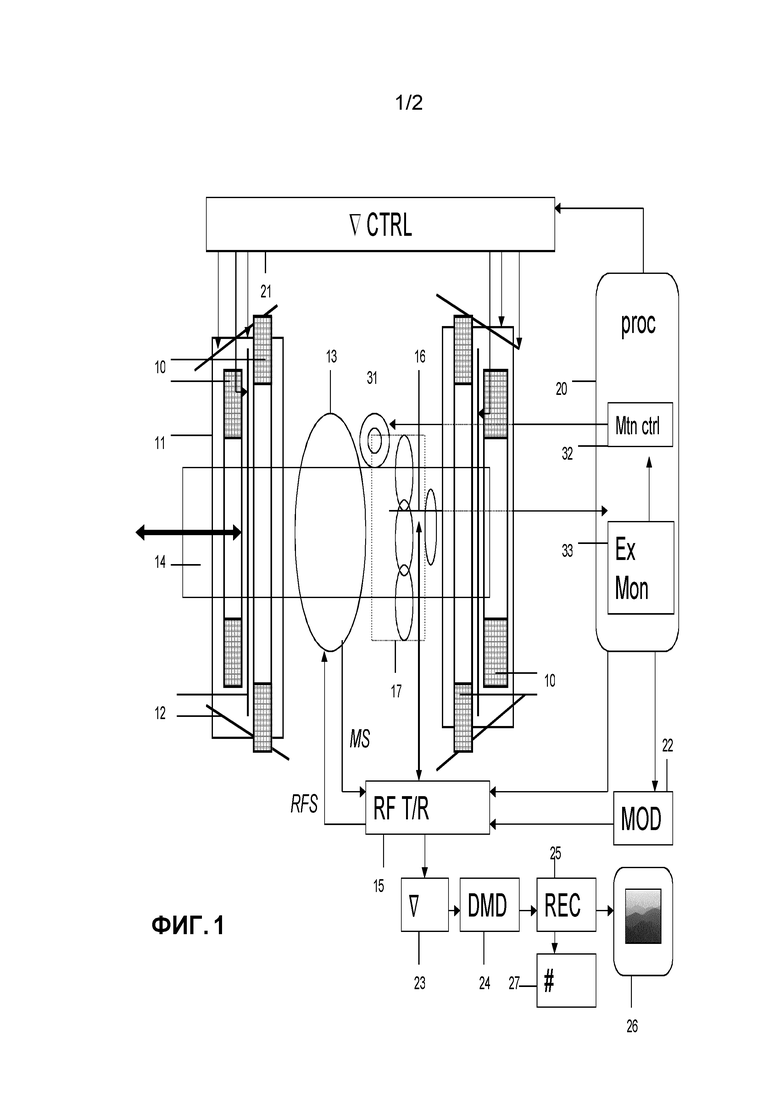
Фиг. 1 схематично показывает магнитно-резонансную систему визуализации, в которой используется настоящее изобретение. Магнитно-резонансная система визуализации включает в себя основной магнит с набором основных катушек 10, посредством которых генерируется постоянное, однородное магнитное поле. Основные катушки конструируются, например, таким образом, чтобы они образовывали зазор для окружения пространства исследования в форме туннеля. Пациента, подлежащего исследованию, размещают на держателе пациента, который вдвигается в это пространство исследования в форме туннеля. Магнитно-резонансная система визуализации также включает в себя некоторое количество градиентных катушек 11, 12, посредством которых генерируются магнитные поля, демонстрирующие пространственные изменения, в частности, в форме временных градиентов в отдельных направлениях, для наложения на однородное магнитное поле. Градиентные катушки 11, 12 соединены со средством 21 управления градиентами, которое включает в себя один или несколько усилителей градиентов и управляемых блоков питания. Градиентные катушки 11, 12 возбуждаются подачей электрического тока посредством блока 21 питания; для этой цели блок питания оснащен электронной схемой усиления градиентов, которая подает электрический ток на градиентные катушки для генерирования градиентных импульсов (также называемых «градиентными формами волны») подходящей временной формы. Интенсивностью, направлением и длительностью градиентов управляет средство управления блока питания. Магнитно-резонансная система визуализации также включает в себя передающие и приемные антенны (катушки или массивы катушек) 13, 16 для генерирования импульсов RF-возбуждения и для приема магнитно-резонансных сигналов, соответственно. Передающая катушка 13 предпочтительно конструируется в виде катушки 13 для тела, посредством которой может быть окружен объект, подлежащий исследованию (или его часть). Катушку для тела обычно располагают в магнитно-резонансной системе визуализации таким образом, чтобы пациент 30, подлежащий исследованию, был окружен катушкой 13 для тела, когда он или она располагается в магнитно-резонансной системе визуализации. Катушка 13 для тела действует как передающая антенна для передачи импульсов RF-возбуждения и импульсов RF-перефокусировки. Предпочтительно, катушка 13 для тела включает в себя пространственно однородное распределение интенсивности передаваемых RF-импульсов (RFS). Та же самая катушка или антенна обычно используется поочередно как передающая антенна и приемная антенна. Обычно, приемная катушка включает в себя множественность элементов, каждый из которых обычно образует единственный контур. Возможны различные геометрии формы контура и расположение различных элементов. Передающая и приемная катушка 13 соединена с электронной схемой 15 передачи и приема.
Следует отметить, что существует один (или несколько) элементов RF-антенны, которые могут действовать как передающие и приемные элементы; дополнительно, обычно, пользователь может выбрать использование специфичной для применения приемной антенны, которая обычно выполнена в виде массива приемных элементов. Например, массивы 16 поверхностных катушек могут быть использованы в качестве приемных и/или передающих катушек. Такие массивы поверхностных катушек имеют высокую чувствительность в сравнительно малом объеме. Приемная катушка соединена с предварительным усилителем 23. Предварительный усилитель 23 усиливает RF-резонансный сигнал (MS), принимаемый приемной катушкой 16, и усиленный RF-резонансный сигнал подается на демодулятор 24. Приемные антенны, такие как массивы поверхностных катушек, соединены с демодулятором 24, и принятые предварительно усиленные магнитно-резонансные сигналы (MS) демодулируются посредством демодулятора 24. Предварительный усилитель 23 и демодулятор 24 могут быть реализованы в цифровой форме и интегрированы в массив поверхностных катушек. Демодулированные магнитно-резонансные сигналы (DMS) подают на блок восстановления. Демодулятор 24 демодулирует усиленный RF-резонансный сигнал. Демодулированный резонансный сигнал содержит фактическую информацию относительно локальных спиновых плотностей в части объекта, подлежащего визуализации. Кроме того, схема 15 передачи и приема соединена с модулятором 22. Модулятор 22 и схема 15 передачи и приема активируют передающую катушку 13 для передачи импульсов RF-возбуждения и RF-перефокусировки. Конкретно, массивы 16 поверхностных приемных катушек соединены со схемой приема и передачи посредством беспроводного канала связи. Данные магнитно-резонансных сигналов, принимаемые массивами 16 поверхностных катушек, передают к схеме 15 приема и передачи, и управляющие сигналы (например, для настраивания и расстраивания поверхностных катушек) отправляют к поверхностным катушкам по беспроводному каналу связи.
Блок восстановления получает один или несколько сигналов изображения из демодулированных магнитно-резонансных сигналов (DMS), причем сигналы изображения представляют информацию изображения визуализируемой части объекта, подлежащего исследованию. Блок 25 восстановления на практике конструируют предпочтительно в виде блока 25 обработки цифровых изображений, который программируют для получения из демодулированных магнитно-резонансных сигналов сигналов изображения, которые представляют информацию изображения части объекта, подлежащего визуализации. Сигнал на выходе блока восстановления подают на монитор 26, так что восстановленное магнитно-резонансное изображение может быть отображено на мониторе. Альтернативно, можно запомнить сигнал из блока 25 восстановления в буферном блоке 27 при ожидании дополнительной обработки или отображения.
Магнитно-резонансная система визуализации согласно настоящему изобретению также снабжена блоком 20 управления, например, в форме компьютера, который включает в себя (микро)процессор. Блок 20 управления управляет выполнением RF-возбуждений и приложением временных градиентных полей. Для этой цели, загружают компьютерную программу согласно настоящему изобретению, например, в блок 20 управления и блок 25 восстановления.
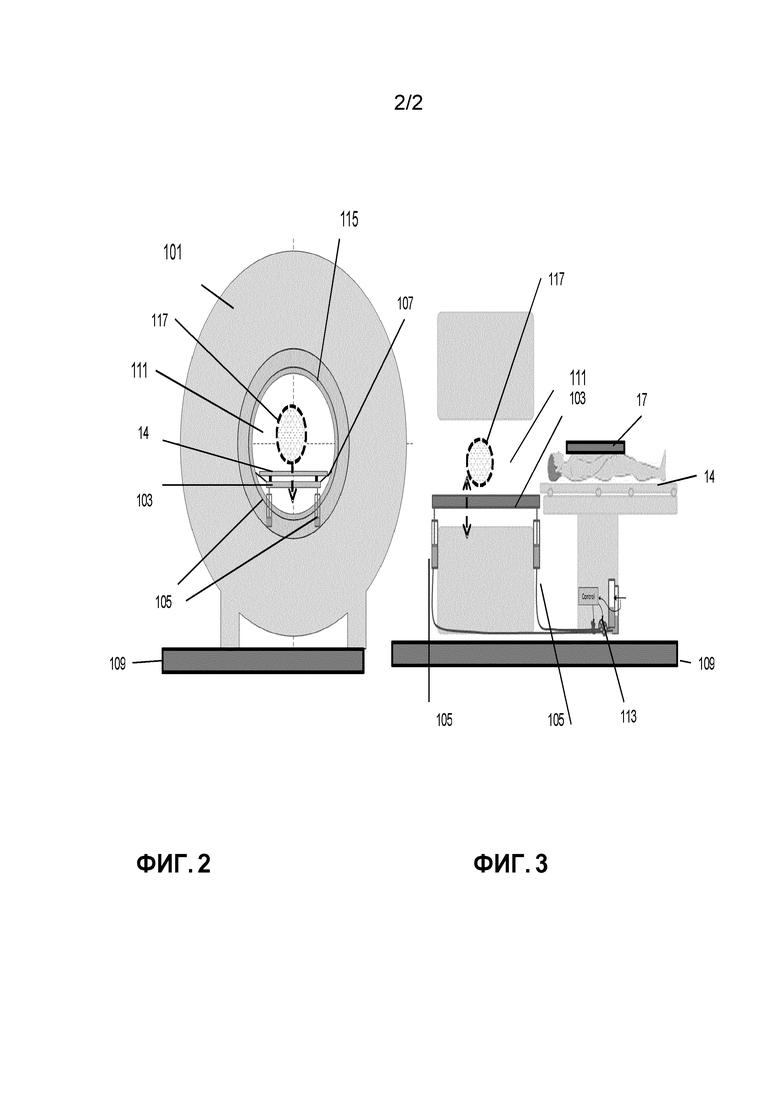
Фиг. 2 показывает вид спереди магнитно-резонансной системы визуализации, в которой используется настоящее изобретение. Фиг. 2 показывает раму 101 магнита, на которой установлены основные катушки, градиентная катушка и RF-катушка для тела. Основные катушки являются цилиндрическими и образуют зазор 115. Внутри зазора 115 расположена зона 111 исследования, из которой может быть получен магнитно-резонансный сигнал от пациента, подлежащего исследованию. Область 117 однородности является обычно сферической или эллипсоидальной областью, в которой основное магнитное поле имеет высокую степень пространственной однородности. Обычно достигается однородность основного магнитного поля, равная 2 ppm (миллионным долям), по сферическому объему с радиусом 25 см. Также, градиентные магнитные поля имеют только очень малые отклонения от линейности. Рама 101 магнита размещена на полу 109 помещения для исследования. Верхняя часть 14 стола пациента установлена на мостовом элементе 103. Мостовой элемент установлен с обеспечением подвижности в направлении, поперечном к поверхности верхней части стола, в этом примере, в вертикальном направлении. Исполнительные механизмы 105 установлены на раме и выполнены с возможностью перемещения мостового элемента в поперечном направлении, т.е. вверх и вниз, как показано двойными стрелками.
Фиг. 3 показывает вид сбоку магнитно-резонансной системы визуализации, в которой используется настоящее изобретение. На фиг. 3, пациент, подлежащий исследованию, показан на верхней части 14 стола, но все еще расположен за пределами зоны 111 исследования магнитно-резонансной системы исследования. Верхняя часть 14 стола находится на основании 113 и может быть перемещена в зону исследования в раме 101 магнита. Массив 17 RF-катушек уже размещен на теле пациента. Массив 17 RF-катушек может быть фактически размещен прямо на теле пациента, или на верхней части 14 стола может быть установлена отдельная опора катушек, к которой может быть прикреплен массив RF-катушек. Элементы 107 кожуха показаны гибко установленными на мостовом элементе 103 и доходят до внутренней стенки зоны исследования. Во время перемещения мостового элемента, элементы кожуха покрывают промежуток между мостовым элементом и внутренней стенкой, а также между верхней частью стола и внутренней стенкой. Исполнительные механизмы 105 являются гидравлическими исполнительными механизмами, которые приводятся в действие гидравлической системой 113, которая расположена в основании 113. Альтернативно, пьезоэлектрические исполнительные механизмы могут быть использованы вместе с электрическим модулем управления и привода для управления исполнительными механизмами для приведения в движение мостового элемента, подлежащего смещению в вертикальном направлении. Модуль 113 управления и привода может быть также объединен со средством 32 управления перемещением для управления столом, подлежащим перемещению продольно в зазор и из зазора.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА МАГНИТНО-РЕЗОНАНСНЫХ ИССЛЕДОВАНИЙ, ИМЕЮЩАЯ ПОЛЬЗОВАТЕЛЬСКИЙ ИНТЕРФЕЙС | 2016 |
|
RU2735676C2 |
| СИСТЕМА МАГНИТНО-РЕЗОНАНСНЫХ ИССЛЕДОВАНИЙ, ИМЕЮЩАЯ ЗОНДЫ ДЛЯ ИССЛЕДОВАНИЯ ПОЛЯ | 2016 |
|
RU2716870C2 |
| СИСТЕМА МАГНИТНО-РЕЗОНАНСНЫХ ИССЛЕДОВАНИЙ С ЖИДКОСТНОЙ ОХЛАЖДАЮЩЕЙ УСТАНОВКОЙ | 2016 |
|
RU2720481C2 |
| МАГНИТНО-РЕЗОНАНСНАЯ (MR) ТОМОГРАФИЯ ЭЛЕКТРИЧЕСКИХ СВОЙСТВ | 2012 |
|
RU2616984C2 |
| МАГНИТОРЕЗОНАНСНАЯ ВИЗУАЛИЗАЦИЯ С МНОГОКАНАЛЬНОЙ ПЕРЕДАЧЕЙ | 2011 |
|
RU2578763C2 |
| МАГНИТНО-РЕЗОНАНСНАЯ (MR) ВИЗУАЛИЗАЦИЯ С В1-ОТОБРАЖЕНИЕМ | 2013 |
|
RU2611082C2 |
| КОНТРОЛЛЕР ПРОСТРАНСТВА СОСТОЯНИЙ С ОБРАТНОЙ СВЯЗЬЮ В ОБЛАСТИ ЦИФРОВЫХ ДАННЫХ ДЛЯ ИСТОЧНИКА ПИТАНИЯ ГРАДИЕНТНОЙ КАТУШКИ ДЛЯ МАГНИТНО-РЕЗОНАНСНОЙ ВИЗУАЛИЗАЦИИ | 2011 |
|
RU2575050C2 |
| ОБЩИЙ ИНДУКТИВНЫЙ РУЧНОЙ БЛОК ДЛЯ АКТИВНЫХ УСТРОЙСТВ | 2009 |
|
RU2518540C2 |
| МНОГОКАНАЛЬНЫЙ РАДИОЧАСТОТНЫЙ ОБЪЕМНЫЙ РЕЗОНАТОР ДЛЯ МАГНИТНО-РЕЗОНАНСНОЙ ВИЗУАЛИЗАЦИИ | 2012 |
|
RU2589275C2 |
| RF АНТЕННОЕ УСТРОЙСТВО И СПОСОБ ВОССТАНОВЛЕНИЯ МНОГОЯДЕРНОГО MR ИЗОБРАЖЕНИЯ, ВКЛЮЧАЮЩИЙ В СЕБЯ ПАРАЛЛЕЛЬНУЮ MRI | 2011 |
|
RU2547755C2 |
Изобретение относится к медицинской технике, а именно к магнитно-резонансной системе исследования пациента с подвижным держателем пациента. Система содержит зону исследования, магнит для приложения статического магнитного поля в зоне исследования, держатель пациента с опорной поверхностью, RF-антенну, имеющую фиксированное геометрическое отношение с опорной поверхностью, причем держатель пациента установлен подвижно в направлении, поперечном к опорной поверхности, причем магнит имеет опорную раму и снабжен мостовым элементом, установленным на опорной раме и подвижно в направлении, поперечном к опорной поверхности, и мостовой элемент поддерживает держатель пациента, магнит является магнитом цилиндрической формы с зазором, в котором расположена зона исследования, причем элементы кожуха обеспечены между мостовым элементом и внутренней стенкой зазора или между держателем пациента и внутренней стенкой зазора. Использование изобретения позволяет улучшить настройку положения пациента в статическом магнитном поле. 7 з.п. ф-лы, 3 ил.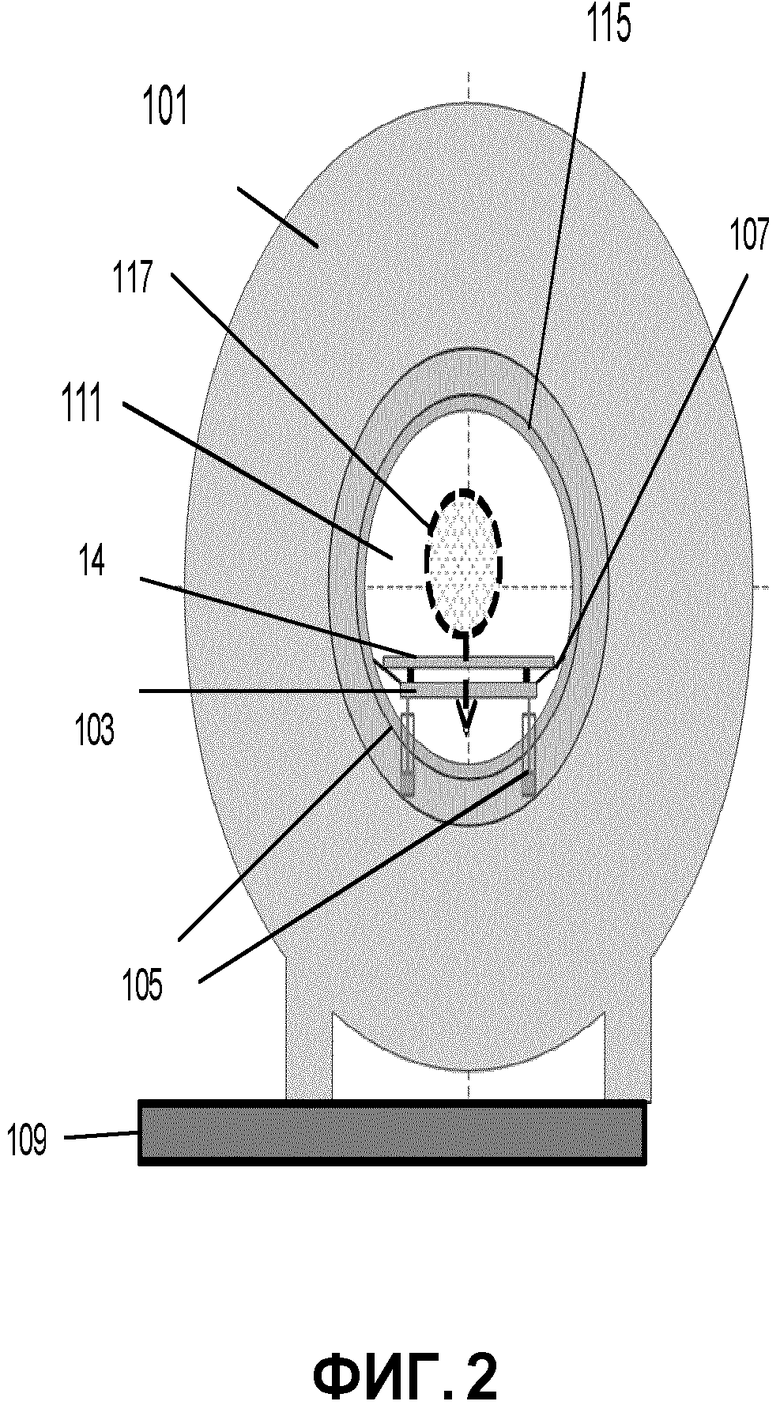
1. Магнитно-резонансная система исследования пациента с подвижным держателем пациента, содержащая:
- зону исследования,
- магнит для приложения статического магнитного поля в зоне исследования,
- держатель пациента с опорной поверхностью,
- RF-антенну, имеющую фиксированное геометрическое отношение с опорной поверхностью, причем
- держатель пациента установлен подвижно в направлении, поперечном к опорной поверхности, причем
магнит имеет опорную раму и снабжен мостовым элементом, установленным на опорной раме и подвижно в направлении, поперечном к опорной поверхности, и, причем, мостовой элемент поддерживает держатель пациента,
магнит является магнитом цилиндрической формы с зазором, в котором расположена зона исследования, причем элементы кожуха обеспечены между мостовым элементом и внутренней стенкой зазора или между держателем пациента и внутренней стенкой зазора.
2. Магнитно-резонансная система исследования по п. 1, в которой элементы кожуха гибко установлены на мостовом элементе или держателе пациента.
3. Магнитно-резонансная система исследования по п. 1 или 2, в которой элементы кожуха изготовлены из гибкого материала, выполнены в виде гибко соединенных элементов кожуха, или выполнены в виде надувных элементов кожуха.
4. Магнитно-резонансная система исследования по п. 1, в которой обеспечена приводная система для управления перемещением держателя пациента, причем приводная система имеет один или несколько исполнительных механизмов для приведения в движение держателя пациента и модуль управления приводами для управления исполнительными механизмами.
5. Магнитно-резонансная система исследования по п. 4, в которой держатель пациента дополнительно установлен подвижно параллельно опорной поверхности.
6. Магнитно-резонансная система исследования по п. 4, снабженная модулем управления сканированием, для управления cбором магнитно-резонансных сигналов, и в которой модуль управления приводами соединен со средством управления сканированием и выполнен с возможностью приведения в движение держателя пациента для компенсации перемещения, вызванного сбором магнитно-резонансных сигналов.
7. Магнитно-резонансная система исследования по п. 4, дополнительно снабженная градиентной катушкой для приложения временного градиентного магнитного поля в зоне исследования, усилителем градиентов для подачи электрического тока к градиентной катушке, причем модуль управления сканированием имеет контроллер градиентов для управления усилителем градиентов и, причем, модуль управления приводами соединен с контроллером градиентов для управления перемещением держателя пациента для компенсации перемещения вследствие переключения градиентного магнитного поля.
8. Магнитно-резонансная система исследования по п. 4, содержащая RF-модуль для генерирования RF-полей в зоне исследования, модуль градиентов для генерирования градиентных магнитных полей в зоне исследования, причем приводная система выполнена с возможностью приведения в действие исполнительных механизмов.
| US 4629989 A, 16.12.1986 | |||
| US 2009189608 A1, 30.07.2009 | |||
| US 2013303882 A1, 14.11.2013 | |||
| WO 2013153493 A1, 17.10.2013 | |||
| RU 2012100769 A, 20.07.2013. |

