ОБЛАСТЬ ТЕХНИКИ
Заявка на патент в целом относится к адаптивным системам автоматического поддержания скорости движения для автомобильных транспортных средств.
УРОВЕНЬ ТЕХНИКИ
Транспортные средства, в том числе автомобили и грузовые автомобили, могут быть оснащены адаптивной системой автоматического поддержания скорости движения, которая может поддерживать выбранную водителем скорость транспортного средства. Адаптивная система автоматического поддержания скорости движения может иметь датчики, которые выявляют скорость транспортного средства впереди транспортного средства и настраивать выбранную водителем скорость для обеспечения достаточной дистанции следования.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В по меньшей мере одном варианте осуществления, предусмотрено транспортное средство, включающее в себя силовую передачу, систему управления скоростью и контроллер. Контроллер может быть запрограммирован, в ответ на активацию системы управления скоростью, в то время как условия указывают, что транспортное средство буксирует объект, эксплуатировать силовую передачу для поддержания целевой дистанции следования между транспортным средством и целевым транспортным средством на основании общей длины транспортного средства и объекта.
В по меньшей мере одном варианте осуществления, предусмотрено транспортное средство, включающее в себя силовую передачу, систему автоматического поддержания скорости движения и контроллер. Контроллер может быть запрограммирован, в ответ на температуру тормозов, являющуюся большей, чем пороговое значение, в то время как система автоматического поддержания скорости движения активирована, а транспортное средство присоединенным к прицепу, эксплуатировать силовую передачу, из условия чтобы скорость транспортного средства убывала, для снижения температуры тормозов.
В по меньшей мере одном варианте осуществления, предусмотрен способ управления транспортным средством. Способ может включать в себя, в ответ на активацию системы управления скоростью транспортного средства и условия, указывающие наличие буксируемого объекта, побуждение пользователя, через интерфейс дисплея, ввести совместную длину транспортного средства и буксируемого объекта. Способ дополнительно может включать в себя эксплуатацию транспортного средства для поддержания дистанции следования между транспортным средством и находящимся впереди транспортным средством.
Предлагается транспортное средство, содержащее силовую передачу; систему управления скоростью; и контроллер, запрограммированный, в ответ на активацию системы управления скоростью, в то время как условия указывают, что транспортное средство буксирует объект, эксплуатировать силовую передачу для поддержания целевой дистанции следования между транспортным средством и целевым транспортным средством на основании общей длины транспортного средства и объекта. Причем контроллер дополнительно запрограммирован, в ответ на температуру тормозов, являющуюся большей, чем пороговое значение, деактивировать систему управления скоростью и выводить для отображения предупреждение о температуре тормозов. Причем контроллер дополнительно запрограммирован, в ответ на наличие условий, побуждать пользователя через интерфейс пользователя вводить длину объекта. Причем контроллер дополнительно запрограммирован, в ответ на удовлетворение силовой передачей команды силовой передачи не в пределах ожидаемого периода времени, побуждать пользователя через интерфейс пользователя вводить длину транспортного средства. Причем температура тормозов выводится из температуры окружающей среды и угла наклона транспортного средства. Причем температура тормозов выдается датчиком температуры, расположенным ближе к тормозному узлу. Причем условия включают в себя по меньшей мере одно из активации буксирного переключателя, присоединения электрического разъема объекта к электрическому разъему прицепа и выявления, датчиком находящегося сзади объекта, объекта в пределах предопределенной дальности сзади транспортного средства.
Также предлагается транспортное средство, содержащее силовую передачу; систему автоматического поддержания скорости движения; и контроллер, запрограммированный, в ответ на температуру тормозов, являющуюся большей, чем пороговое значение, в то время как система автоматического поддержания скорости движения активирована, а транспортное средство присоединенным к прицепу, эксплуатировать силовую передачу, из условия чтобы скорость транспортного средства убывала, для снижения температуры тормозов. Причем контроллер дополнительно запрограммирован, в ответ на температуру тормозов, являющуюся большей, чем пороговое значение, в то время как система автоматического поддержания скорости движения активирована, а транспортное средство присоединенным к прицепу, деактивировать систему автоматического поддержания скорости движения и вводить для отображения предупреждение об автоматическом поддержании скорости движения. Причем контроллер дополнительно запрограммирован, в ответ на общее время для удовлетворения команды силовой передачи, превышающее пороговое значение, выводить для отображения запроса, чтобы пользователь вводил общую длину транспортного средства. Причем контроллер дополнительно запрограммирован, в ответ на нажатие тормозной педали, большее, чем пороговое положение тормозной педали, и замедление транспортного средства, меньшее, чем пороговое замедление, выводить для отображения запрос, чтобы пользователь вводил общую длину транспортного средства. Причем контроллер дополнительно запрограммирован, в ответ на инерционный отклик транспортного средства, больший, чем пороговое значение, выводить для отображения запрос, чтобы пользователь вводил общую длину транспортного средства.
Также предлагается способ управления транспортным средством, состоящий в том, что в ответ на активацию системы управления скоростью транспортного средства и условия, указывающие наличие буксируемого объекта, побуждают пользователя, через интерфейс дисплея, ввести совместную длину транспортного средства и буксируемого объекта; и эксплуатируют транспортное средство для поддержания дистанции следования между транспортным средством и находящимся спереди транспортным средством, которая основана на совместной длине и температуре тормозов. Причем в ответ на температуру тормозов, являющуюся большей, чем пороговое значение, выводят для отображения предупреждение, указывающее температуру тормозов. Причем в ответ на температуру тормозов, являющуюся большей, чем пороговое значение, эксплуатируют транспортное средством для снижения скорости транспортного средства. Причем эксплуатация транспортного средства для снижения скорости транспортного средства заключается в том, что замедляют выходной вал по меньшей мере до тех пор, пока температура тормозов не является меньшей, чем пороговое значение. Причем эксплуатация транспортного средства для снижения скорости транспортного средства заключается в том, что нажимают аварийный тормоз транспортного средства. Причем эксплуатация транспортного средства для снижения скорости транспортного средства заключается в том, что тормозят двигатель по меньшей мере до тех пор, пока температура тормозов не является меньшей, чем пороговое значение. Причем эксплуатация транспортного средства для снижения скорости транспортного средства заключается в том, что ограничивают команду силовой передачи по меньшей мере до тех пор, пока температура тормозов не является меньшей, чем пороговое значение.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
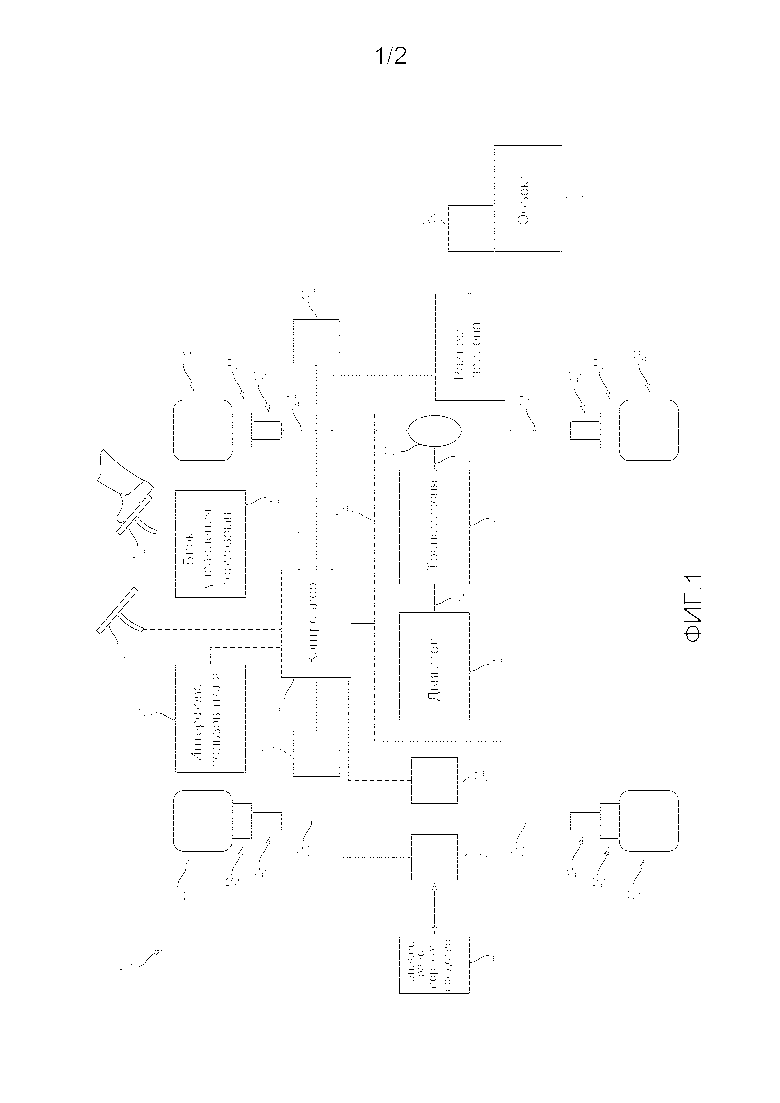
Фиг. 1 - принципиальная схема транспортного средства, присоединенного к объекту.
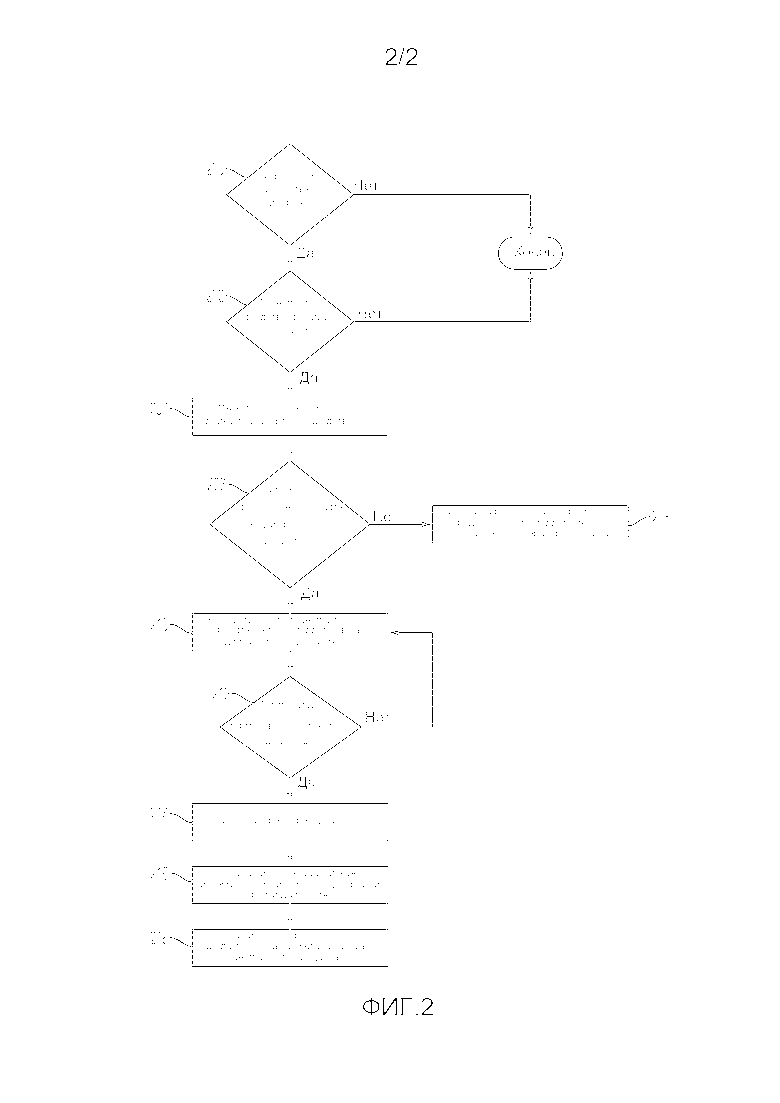
фиг. 2 - блок-схема последовательности операций примерного способа управления транспортным средством.
ПОДРОБНОЕ ОПИСАНИЕ
Как требуется, в материалах настоящей заявки раскрыты детализированные варианты осуществления настоящего изобретения; однако, должно быть понятно, что раскрытые варианты осуществления являются всего лишь примером изобретения, которое может быть воплощено в различных и альтернативных формах. Фигуры не обязательно должны определять масштаб; некоторые признаки могут быть преувеличены или сведены к минимуму, чтобы показать подробности конкретных компонентов. Поэтому, специфичные конструктивные и функциональные детали, раскрытые в материалах настоящей заявки, не должны интерпретироваться в качестве ограничивающих, а только качестве представляющих основу для изучения специалистом в данной области техники для различного применения настоящего изобретения.
Со ссылкой на фиг. 1, проиллюстрирована принципиальная схема транспортного средства 10 согласно варианту осуществления настоящего раскрытия. Физическое размещение и ориентация компонентов внутри транспортного средства 10 могут меняться. Хотя будет конкретно описана силовая передача по фиг. 1, стратегии в соответствии с вариантами осуществления настоящего раскрытия могут применяться к другим конфигурациям силовой передачи. Транспортное средство 10 может включать в себя силовую передачу 12. Силовая передача 12 может включать в себя двигатель 14, который оперативно присоединен к трансмиссии16 входным валом 18. В некоторых конфигурациях, силовая передача 12 может включать в себя электрическую машину, избирательно присоединяемую к двигателю через муфту расцепления. Трансмиссия 16 может включать в себя муфту расцепления, электрическую машину, такую как электродвигатель-генератор, ассоциативно связанную тяговую аккумуляторную батарею, входной вал, пусковое сцепление или гидротрансформатор и коробку передач.
Трансмиссия 16 может быть сконфигурирована в качестве трансмиссии со ступенчатым передаточным числом, использующей многочисленные фрикционные элементы для переключений передаточного отношения трансмиссии. Трансмиссия 16 может быть выполнена с возможностью создавать многочисленные передние и задние передачи с помощью многочисленных элементов зубчатой передачи, расположенных в коробке передач трансмиссии 16.
Коробка передач трансмиссии (не показана) может быть оснащена множеством зубчатых пар, которые избирательно размещаются в разных передаточных отношениях посредством избирательного зацепления фрикционных элементов, таких как элементы переключения, в том числе, муфты, имеющие элементы сцепления и тормоза (не показаны). Разные передаточные отношения, предусмотренные зубчатыми парами, могут устанавливать многочисленные передаточные числа, которые могут соответствовать разным общим передаточным числам трансмиссии.
Выходной вал 20 может продолжаться из трансмиссии 16 и может быть оперативно присоединен к дифференциалу 22. Задний мост 24 может быть оперативно присоединен к дифференциалу, и задний мост 24 может с возможностью вращения поддерживать задний колесный узел 26. Дифференциал 22 может выдавать крутящий момент на задний мост 24 и, в конечном счете, в задний колесный узел 26, чтобы приводить в движение транспортное средство 10.
Транспортное средство 10 может включать в себя передний мост 28, расположенный на определенном расстоянии от заднего моста 24. Передний мост 28 может поддерживать с возможностью вращения передний колесный узел 30. Передний мост 28 может быть сконфигурирован в качестве ведущего моста, который может принимать крутящий момент из переднего дифференциала (не показан) и выдавать крутящий момент на передний колесный узел 30, чтобы приводить в движение транспортное средство 10. В по меньшей мере одном варианте осуществления, передний мост 28 может быть сконфигурирован в качестве моста с управляемыми колесами. Мост с управляемыми колесами может сочленять передний колесный узел 30, чтобы поворачивать транспортное средство 10.
Транспортное средство 10 может быть оснащено тормозной системой. Тормозная система может включать в себя блок 40 управления тормозами на связи с тормозной педалью 42, задним тормозным узлом 44, передним тормозным узлом 46 и датчиком 48 температуры. Блок 40 управления тормозами может интерпретировать нажатие тормозной педали 42 в качестве запроса замедлить вращательное движение заднего колесного узла 26
Задний тормозной узел 44 может быть оперативно присоединен к заднему колесному узлу 26. Передний тормозной узел 46 может быть оперативно присоединен к переднему колесному узлу 30. Задний тормозной узел 44 и/или передний тормозной узел 46 могут быть сконфигурированы в качестве пары узлов тормозной колодки, расположенных вокруг ротора. Приведение в действие узлов тормозной накладки может выдавать усилие зажима на ротор, из условия чтобы узлы тормозной накладки фрикционно сцеплялись с ротором. Фрикционное сцепление узлов тормозной накладки с ротором может замедлять вращательное движение ротора и замедлять вращение заднего колесного узла 26 и/или переднего колесного узла 30.
В по меньшей мере одном варианте осуществления, задний тормозной узел 44 и/или передний тормозной узел 46 могут быть сконфигурированы в качестве пары тормозных колодок, расположенных в тормозном барабане. Приведение в действие тормозных колодок может заставлять тормозные колодки фрикционно сцепляться с поверхностью тормозного барабана. Фрикционное сцепление тормозных колодок с тормозным барабаном может замедлять вращательное движение тормозного барабана и замедлять вращение заднего колесного узла 26 и/или переднего колесного узла 30.
Фрикционное сцепление узлов тормозной накладки с ротором или тормозных колодок с тормозным барабаном может вырабатывать теплоту трения. Вырабатываемое тепло может повышать температуру заднего тормозного узла 44 и переднего тормозного узла 46. По мере того, как температура тормозных узлов возрастает, коэффициент трения фрикционного материала заднего тормозного узла 44 и/или переднего тормозного узла 46 может убывать. Снижение коэффициента трения фрикционного материала может приводить к повышению мощности торможения и являющемуся результатом увеличению тормозных путей, испытываемых транспортным средством.
Датчик 48 температуры может быть расположен ближе к заднему тормозному узлу 44 и переднему тормозному узлу 46. Датчик 48 температуры может находиться на связи с блоком 40 управления тормозами. Датчик 48 температуры может быть выполнен с возможностью контролировать температуру заднего тормозного узла 44 и переднего тормозного узла 46.
Температура тормозов может оцениваться блоком 40 управления тормозами на основании величины нажатия тормозной педали в специфичных ситуациях. Нажатие тормозов транспортного средства, в то время как транспортное средство 10 имеет нисходящий наклон, может давать в результате большие температуры тормозов, чем когда транспортное средство является действующим на меньшем уклоне. Многомерная справочная таблица может быть предусмотрена в качестве части блока 40 управления тормозами для оценки температуры тормозов. Оценка температуры тормозов может быть основана на комбинации температуры окружающей среды, свойств материалов заднего тормозного узла 44 или переднего тормозного узла 46, величины нажатия тормозной педали или положения тормозной педали и угла наклона транспортного средства.
Транспортное средство 10 может быть оснащено контроллером 50. Контроллер 50 может быть на связи с силовой передачей 12, блоком 40 управления тормозами и различными другими компонентами транспортного средства. Несмотря на то, что проиллюстрирован в качестве одного контроллера, контроллер 50 может быть частью большей системы управления и может управляться различными другими контроллерами по всему транспортному средству 10, такими как контроллер системы транспортного средства (VSC). Поэтому, должно быть понятно, что контроллер 50 и один или более других контроллеров могут вместе указываться ссылкой как «контроллер», который управляет различными исполнительными механизмами в ответ на сигналы с различных датчиков, чтобы управлять функциями, такими как запуск/останов двигателя 14, настройка установки момента зажигания двигателя, настройка торможения двигателем, выбор или планирование переключений трансмиссии, приведение в действие заднего тормозного узла 44 и переднего тормозного узла 46, и т.д.
Контроллер 50 может включать в себя по меньшей мере один микропроцессор или центральное процессорное устройство (ЦПУ, CPU) на связи с различными типами машинно-читаемых запоминающих устройств или носителей. Машинно-читаемые запоминающие устройства или носители могут включать в себя энергозависимое и энергонезависимое запоминающее устройство, например, в постоянном запоминающем устройстве (ПЗУ, ROM), оперативном запоминающем устройстве (ОЗУ, RAM) и дежурной памяти (KAM). KAM является постоянной или энергонезависимой памятью, которая может использоваться для хранения различных рабочих переменных, в то время как выключено питание ЦПУ. Машинно-читаемые запоминающие устройства или носители могут быть реализованы с использованием любого из некоторого количества известных устройств памяти, таких как ППЗУ (программируемые постоянные запоминающие устройства PROM), ЭППЗУ (электрически программируемые ПЗУ, EPROM), ЭСППЗУ (электрически стираемые ППЗУ, EEPROM), флэш-память или любые другие электрические, магнитные, оптические или комбинированные устройства памяти, способные к хранению данных, некоторые из которых представляют собой исполняемые команды, используемые контроллером 50 при управлении силовой передачей 12 или транспортным средством 10.
Контроллер 50 может включать в себя модуль автоматического поддержания скорости движения или систему автоматического поддержания скорости движения. Система автоматического поддержания скорости движения может стремиться эксплуатировать силовую передачу 12, чтобы поддерживать заданную оператором скорость транспортного средства через интерфейс 60 пользователя. Контроллер 50 может принимать скорость транспортного средства с датчика 62 скорости транспортного средства и может стремиться минимизировать любые расхождения между заданной оператором скоростью транспортного средства и скоростью транспортного средства, измеренной датчиком скорости транспортного средства.
Система автоматического поддержания скорости движения может быть адаптивной системой автоматического поддержания скорости движения контроллера 50. Адаптивная система автоматического поддержания скорости движения контроллера 50 может эксплуатировать силовую передачу 12 и другие подсистемы транспортного средства для поддержания целевой дистанции следования между транспортным средством 10 и целевым транспортным средством 70. Целевое транспортное средство 70 может быть другим транспортным средством в пределах предопределенной дальности впереди транспортного средства 10 или в пределах предопределенной дальности позади транспортного средства 10.
Адаптивная система автоматического поддержания скорости движения контроллера 50 может настраивать или корректировать заданную оператором скорость транспортного средства. Заданная оператором скорость транспортного средства может корректироваться на основании по меньшей мере одного из целевой дистанции следования и скорости целевого транспортного средства 70. Адаптивная система автоматического поддержания скорости движения контроллера 50 может корректировать заданную оператором скорость транспортного средства и побуждать силовую передачу 12 приводиться в действие, чтобы поддерживать целевую дистанцию следования. Адаптивная система автоматического поддержания скорости движения контроллера 50 также может эксплуатировать задний тормозной узел 44 или передний тормозной узел 46 для удовлетворения настроенной заданной оператором скорости транспортного средства.
Адаптивная система автоматического поддержания скорости движения контроллера 50 может находиться на связи с датчиком 62 скорости транспортного средства, датчиком 80 находящегося спереди объекта, датчиком 82 находящегося сзади объекта и инерционного датчика 84 транспортного средства.
Датчик 80 находящегося спереди объекта может быть выполнен с возможностью выявлять, находится ли целевое транспортное средство 70 спереди транспортного средства 10. Датчик находящегося спереди объекта может контролировать переднюю дистанцию и/или боковой интервал между транспортным средством 10 и целевым транспортным средством 70. Датчик 80 находящегося спереди объекта может быть расположен в бампере транспортного средства, передней облицовке или другом находящемся спереди положении на транспортном средстве 10. Датчик 80 находящегося спереди объекта может быть радиолокатором, радиочастотным (РЧ, RF) датчиком, оптическим датчиком, лазерным передатчиком и соответствующим приемником, или тому подобным.
Датчик 82 находящегося сзади объекта может быть выполнен с возможностью выявлять, находится ли объект сзади транспортного средства 10. Датчик 82 находящегося сзади объекта может контролировать заднюю дистанцию и/или боковой интервал между транспортным средством 10 и объектом. В по меньшей мере одном варианте осуществления, датчик 82 находящегося сзади объекта может быть выполнен с возможностью контролировать, присоединено ли транспортное средство 10 к или буксирует объект 90. Датчик 82 находящегося сзади объекта может быть расположен в заднем бампере транспортного средства, заднем откидном борте, багажнике или другом находящемся сзади положении на транспортном средстве 10. Датчик 82 находящегося сзади объекта может быть радиолокатором, радиочастотным (РЧ, RF) датчиком, оптическим датчиком или лазерным передатчиком и соответствующим приемником, камерой заднего вида, или тому подобным.
В ситуациях, в которых транспортное средство 10 присоединено к прицепу или буксирует объект 90, адаптивная система автоматического поддержания скорости движения контроллера 50 может оценивать целевую дистанцию следования между транспортным средством 10 и целевым транспортным средством 70. Целевая дистанция следования может рассчитываться, из условия, чтобы она удовлетворяла правительственным требованиям к дистанции следования для буксирующего объект транспортного средства. Адаптивная система автоматического поддержания скорости движения контроллера 50 может применять алгоритм дистанции следования, основанный на скорости транспортного средства, скорости целевого транспортного средства 70 и общей длине транспортного средства 10 и буксируемого объекта 90.
Адаптивная система автоматического поддержания скорости движения контроллера 50 может эксплуатировать силовую передачу 12 и/или тормозную систему, например, для поддержания по меньшей мере одной секунды дистанции следования на каждые 10 футов общей длины транспортного средства для скоростей транспортного средства, меньших, чем 40 миль в час. Адаптивная система автоматического поддержания скорости движения контроллера 50 может эксплуатировать силовую передачу 12 и/или тормозную систему, например, для поддержания одной секунды плюс по меньшей мере одной секунды дистанции следования на каждые 10 футов общей длины транспортного средства для скоростей транспортного средства, больших, чем 40 миль в час. Другие сценарии также возможны.
Контроллер 50 может быть выполнен с возможностью определять, указывают ли условия, что транспортное средство 10 буксирует объект 90 многообразием способов. Прямой способ может включать в себя активацию оператором буксирного переключателя или буксировочного переключателя, или инициирование режима буксира/буксировки через интерфейс 60 пользователя.
Контроллер 50 может быть на связи с датчиком 82 находящегося сзади объекта. Датчик 82 находящегося сзади объекта может быть выполнен с возможностью выявлять, находится ли буксируемый объект 90 в пределах предопределенного расстояния сзади транспортного средства 10 или присоединен к транспортному средству 10.
Контроллер 50 может находиться на связи с электрическим разъемом 92 прицепа, расположенным на транспортном средстве 10. Электрический разъем 92 прицепа может быть выполнен с возможностью соединять электрический разъем 94 объекта с транспортным средством 10. Электрическое соединение между транспортным средством 10 и буксируемым объектом 90 может указывать, что транспортное средство буксирует объект.
Контроллер 50 может быть на связи с педалью 100 акселератора. Контроллер может быть выполнен с возможностью принимать положение педали акселератора с педали 100 акселератора и интерпретировать положение педали акселератора в качестве команды силовой передачи. Силовая передача 12 впоследствии может эксплуатироваться в стремлении удовлетворить команду силовой передачи. Команда силовой передачи может включать в себя запрос крутящего момента двигателя или крутящего момента трансмиссии. Контроллер 50 может соотносить запрос крутящего момента двигателя с положением дросселя двигателя, которое может содействовать удовлетворению команды силовой передачи силовой передачей 12.
Контроллер 50 дополнительно может быть запрограммирован определять общее время, требуемое, чтобы силовая передача 12 удовлетворила команду силовой передачи. Контроллер 50 может сравнивать общее (истекшее) время с ожидаемым временем или ожидаемым периодом времени, в пределах которого силовая передача 12 может удовлетворять команду силовой передачи. Если общее время, требуемое для удовлетворения команды силовой передачи, будет меньшим, чем или равным ожидаемому времени для удовлетворения команды силовой передачи, контроллер 50 может определять, что транспортное средство 10 не буксирует объект. Если общее время, требуемое для удовлетворения команды силовой передачи, является большим, чем ожидаемое время для удовлетворения команды силовой передачи, контроллер 50 может определять, что транспортное средство 10 буксирует объект 90.
Контроллер 50 может находиться на связи с блоком 40 управления тормозами. Блок 40 управления тормозами может быть выполнен с возможностью принимать положение тормозной педали и запрограммирован интерпретировать положение тормозной педали в качестве команды для приведения в действие заднего тормозного узла 44 и переднего тормозного узла 46. Вообще, чем больше положение тормозной педали, тем больше и больше сила торможения, приложенная к колесным узлам транспортного средства. Если транспортное средство 10 буксирует объект 90, большая сила торможения может требоваться для замедления вращения заднего и переднего колесных узлов 26, 30 вследствие буксируемого объекта 90. По определению контроллером 50 положения тормозной педали, большего, чем пороговое положение тормозной педали, и замедления транспортного средства, меньшего, чем пороговая величина замедления, контроллер 50 может определять, что транспортное средство 10 буксирует объект 90.
Контроллер 50 может быть на связи с модулем управления устройствами пассивной безопасности или модулем системы курсовой устойчивости автомобиля, которые могут содержать в себе инерциальные датчики 84. Инерциальные датчики 84 транспортного средства могут быть выполнены с возможностью измерять инерционный отклик транспортного средства, в то время как транспортное средство 10 эксплуатируется. Инерциальные датчики 84 транспортного средства могут включать в себя датчик поворота автомобиля вокруг вертикальной оси, выполненный с возможностью измерять скорость поворота или угловую скорость рыскания транспортного средства, акселерометр, выполненный с возможностью измерять поперечное ускорение или продольное ускорение/замедление, датчик наклона, выполненный с возможностью измерять угол или положение наклона транспортного средства, датчик крена, выполненный с возможностью измерять угол крена транспортного средства, и датчик загрузки транспортного средства, выполненный с возможностью измерять загрузку транспортного средства. В ответ на инерционный отклик транспортного средства, больший, чем пороговое значение, измеренный инерциальными датчиками 84 транспортного средства, контроллер 50 может определять, является ли транспортное средство 10 буксирующим объект 90.
В ответ на условия, указывающие, что транспортное средство 10 буксирует объект 90, контроллер 50 может выводить для отображения, через интерфейс 60 пользователя, приглашение к действию. Приглашение к действию может запрашивать, чтобы оператор транспортного средства вводил общую длину транспортного средства 10. Общая длина транспортного средства 10 может включать в себя длину транспортного средства 10 и длину буксируемого объекта 90. В по меньшей мере одном варианте осуществления, длина транспортного средства 10 может быть известна, а приглашение к действию может запрашивать, чтобы оператор вводил длину буксируемого объекта 90.
Контроллер 50 может побуждать пользователя вводить требуемую скорость транспортного средства через интерфейс 60 пользователя в ответ на активацию оператором адаптивной системы автоматического поддержания скорости движения контроллера 50. Силовая передача 12 может эксплуатироваться, чтобы удовлетворять требуемой скорости транспортного средства. В ответ на выявление датчиком 80 находящегося спереди объекта целевого транспортного средства 70 впереди транспортного средства 10, адаптивная система автоматического поддержания скорости движения контроллера 50 может рассчитывать целевую дистанцию следования. Целевая дистанция следования может быть основана на требуемой скорости транспортного средства, скорости целевого транспортного средства и общей длине транспортного средства 10, включая буксируемый объект 90.
Силовая передача 12, задний тормозной узел 44 и/или передний тормозной узел 46 могут эксплуатироваться, чтобы поддерживать целевую дистанцию следования между транспортным средством 10 и целевым транспортным средством. Контроллер 50 и/или адаптивная система автоматического поддержания скорости движения контроллера 50 могут контролировать температуру задних тормозов и температуру передних тормозов, в то время как адаптивная система автоматического поддержания скорости движения контроллера 50 активирована.
В то время как адаптивная система автоматического поддержания скорости движения контроллера 50 активирована, задний тормозной узел 44 и/или передний тормозной узел 46 могут эксплуатироваться снижать скорость транспортного средства для поддержания целевой дистанции следования. Буксируемый объект 90 может требовать, чтобы большее тормозное усилие прикладывалось задним тормозным узлом 44 и/или передним тормозным узлом 46 для снижения скорости транспортного средства. Большее тормозное усилие может повышать температуру заднего тормозного узла 44 и/или переднего тормозного узла 46 выше пороговой температуры тормозов.
В ответ на температуру тормозов, являющуюся большей, чем пороговая температура тормозов, предупреждение о температуре тормозов транспортного средства может выводиться для отображения через интерфейс 60 пользователя. Адаптивная система автоматического поддержания скорости движения контроллера 50 также может деактивироваться, и предупреждение об адаптивной системе автоматического поддержания скорости движения контроллера 50 может выводиться для отображения через интерфейс 60 пользователя.
Предупреждение о температуре тормозов транспортного средства может запрашивать, чтобы водитель транспортного средства 10 снижал температуры заднего тормозного узла 44 и/или переднего тормозного узла 46. В по меньшей мере одном варианте осуществления, контроллер 50 может быть запрограммирован, в ответ на температуру тормозов, являющуюся большей, чем пороговая температура тормозов, эксплуатировать силовую передачу 12, из условия чтобы снижалась температура тормозов, и/или снижалась скорость транспортного средства.
Контроллер 50 может применять различные стратегии транспортного средства для снижения скорости транспортного средства без нажатия тормозов транспортного средства. Стратегии могут включать в себя 1) торможение двигателем для закрывания или ограничения дросселя двигателя, чтобы создавать частичный вакуум для уменьшения скорости транспортного средства, 2) торможение снятием давления для приведения в действие выпускного клапана двигателя, чтобы выпускать сжатый воздух в цилиндре двигателя в верхней точке такта сжатия, 3) торможение или замедление трансмиссии, если транспортное средство оборудовано таким образом, для замедления вращения входного вала 18 или выходного вала 20 трансмиссии 16, 4) осуществление запаздывания искрового зажигания двигателя для снижения числа оборотов двигателя, или 5) торможение системой выпуска, если транспортное средство 10 оборудовано таким образом, для применения ограничения внутри системы выпуска транспортного средства для повышения противодавления отработавших газов.
Со ссылкой на фиг. 2, показана блок-схема последовательности операций примерного способа управления транспортным средством. Как будет принято во внимание рядовым специалистом в данной области техники, блок-схема последовательности операций способа представляет собой управляющую логику, которая может быть реализована в аппаратных средствах, программном обеспечении или комбинации аппаратных средств и программного обеспечения. Например, различные функции могут быть реализованы запрограммированным микропроцессором. Управляющая логика может быть реализована с использованием любого из некоторого количества известных технологий или стратегий программирования или обработки и не ограничена проиллюстрированными порядком или последовательностью. Например, управляемая прерываниями или событиями обработка может использоваться в устройствах управления реального времени вместо чисто последовательной стратегии, как проиллюстрировано. Подобным образом, могут использоваться системы и способы параллельной обработки, многозадачные или многопоточные.
Управляющая логика может быть независимой от конкретного языка программирования, операционной системы, процессора или схемы, используемой для разработки и/или реализации проиллюстрированной управляющей логики. Подобным образом, в зависимости от конкретного языка программирования и стратегии обработки, различные функции могут выполняться в проиллюстрированной последовательности, по существу одновременно или в разной последовательности при выполнении способа управления. Проиллюстрированные функции могут быть модифицированы или в некоторых случаях опущены, не выходя из намеченного объема.
В по меньшей мере одном из вариантов осуществления, способ может выполняться контроллером 50 и может быть реализован в качестве системы управления с обратной связью. Ради краткости, способ будет описан ниже в контексте однократной итерации способа. В дополнение, способ будет описан ниже в отношении управления первым и вторым узлами моста, но должно быть понятно, что дополнительные узлы моста могут управляться способом.
На вершине 200 блок-схемы, способ может оценивать, введена ли в действие адаптивная система автоматического поддержания скорости движения. Например, если адаптивная система автоматического поддержания скорости движения не активирована, и/или адаптивная система автоматического поддержания скорости движения не является функционирующей, способ может заканчиваться. Если адаптивная система автоматического поддержания скорости движения будет действующей, способ может переходить на вершину 202 блок-схемы.
На вершине 202 блок-схемы, способ может оценивать, указывают ли условия наличие буксируемого объекта 90. Буксируемый объект 90 может быть прицепом, присоединенным к транспортному средству 10. Если условия не указывают, что транспортное средство 10 буксирует объект 90, способ может заканчиваться. Если условия указывают, что транспортное средство 10 буксирует объект 90, способ может продолжаться на вершине 204 блок-схемы.
На вершине 204 блок-схемы, способ может побуждать пользователя через интерфейс 60 пользователя вводить совместную длину транспортного средства 10 и буксируемого объекта 90. В по меньшей мере одном варианте осуществления, длина транспортного средства 10 может быть известна, и способ может побуждать пользователя вводить длину только буксируемого объекта 90.
На вершине 206 блок-схемы, способ может оценивать, находится ли целевое транспортное средство впереди транспортного средства 10. Если датчик 80 находящегося спереди объекта не выявляет целевое транспортное средство 70 в пределах предопределенной дальности, способ может продолжаться на вершине 208 блок-схемы. На вершине 208 блок-схемы, способ может эксплуатировать транспортное средство 10 для поддержания установленной оператором скорости транспортного средства. Если датчик 80 находящегося спереди объекта выявит целевое транспортное средство 70 в пределах предопределенной дальности, способ может продолжаться на вершине 210 блок-схемы.
На вершине 210 блок-схемы, способ может эксплуатировать транспортное средство для поддержания дистанции следования между транспортным средством 10 и целевым транспортным средством 70. Дистанция следования может быть основана на совместной длине транспортного средства 10 и буксируемого объекта 80, требуемой скорости транспортного средства, реальной скорости транспортного средства или температуре тормозов.
На вершине 212 блок-схемы, способ может оценивать, является ли температура тормозов заднего тормозного узла 44 и/или переднего тормозного узла 46 большей, чем пороговая температура тормозов. Если температура тормозов обоих, заднего тормозного узла 44 и переднего тормозного узла 46, является меньшей, чем пороговая температура тормозов, способ может возвращаться на вершину 210 блок-схемы. На вершине 210 блок-схемы, способ может продолжать эксплуатировать транспортное средство 10 для поддержания дистанции следования между транспортным средством 10 и целевым транспортным средством 70. Если температура тормозов любого из заднего тормозного узла 44 или переднего тормозного узла 46 будет большей, чем пороговая температура тормозов, способ может продолжаться на вершине 214 блок-схемы.
На вершине 214 блок-схемы, способ может выводить для отображения предупреждение, указывающее температуру тормозов, большую, чем пороговая температура тормозов. На вершине 216 блок-схемы, способ может деактивировать адаптивную систему автоматического поддержания скорости движения и выводить предупреждение, указывающее на деактивацию адаптивной системы автоматического поддержания скорости движения.
На вершине 218 блок-схемы, способ может эксплуатировать транспортное средство для снижения скорости транспортного средства без применения заднего тормозного узла 44 или переднего тормозного узла 46 по меньшей мере до тех пор, пока температура тормозов не является меньшей, чем пороговая температура тормозов. Способ может ограничивать команду силовой передачи, из условия, чтобы был ограничен входной сигнал педали акселератора. Ограниченная команда силовой передачи также может уменьшать подачу топлива в двигатель 14 или цилиндр двигателя.
В по меньшей мере одном варианте осуществления, аварийный тормоз транспортного средства может нажиматься для снижения скорости транспортного средства. В еще одном иллюстративном варианте осуществления, способ может давать команду переключения с понижением передачи трансмиссии на более низкую передачу или передаточное число для снижения скорости транспортного средства.
Несмотря на то, что примерные варианты осуществления описаны выше, не предполагается, что эти варианты осуществления описывают все возможные формы изобретения. Предпочтительнее, словесные формулировки, используемые в описании изобретения, являются скорее словесными формулировками описания, нежели ограничением, и понятно, что различные изменения могут быть произведены, не выходя из сущности и объема изобретения. Дополнительно, признаки различных вариантов осуществления реализации могут комбинироваться для формирования дополнительных вариантов осуществления изобретения.
Группа изобретений относится к транспортным средствам и способу управления транспортным средством. Транспортное средство содержит: силовую передачу, систему управления скоростью и контроллер. Контроллер запрограммирован, в ответ на активацию системы управления скоростью, когда условия указывают, что транспортное средство буксирует объект, эксплуатировать силовую передачу для поддержания целевой дистанции следования между транспортным средством и целевым транспортным средством на основе общей длины транспортного средства и объекта. Также контроллер запрограммирован, в ответ на температуру тормозов, являющуюся большей чем пороговое значение, когда система автоматического регулирования скорости движения активирована, а транспортное средство присоединено к прицепу, эксплуатировать силовую передачу для поддержания целевой дистанции следования между транспортным средством и целевым транспортным средством на основании общей длины транспортного средства и объекта так, чтобы скорость транспортного средства убывала, для снижения температуры тормозов. Также, в ответ на активацию системы управления скоростью транспортного средства и условия, указывающие на наличие буксируемого объекта, побуждают пользователя, через интерфейс дисплея, ввести совместную длину транспортного средства и буксируемого объекта. Достигается предоставление системы адаптивного круиз-контроля для поддержания заданной дистанции до находящегося впереди транспортного средства на основании общей длинны транспортного средства и буксируемого объекта с возможностью регулировки температуры тормозов. 3 н. и 16 з.п. ф-лы, 2 ил.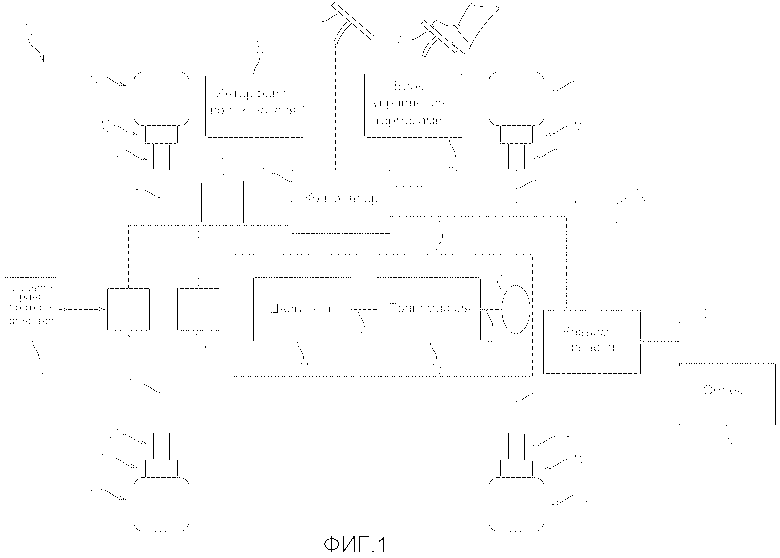
1. Транспортное средство, содержащее:
силовую передачу;
систему управления скоростью; и
контроллер, запрограммированный, в ответ на активацию системы управления скоростью, в то время как условия указывают, что транспортное средство буксирует объект, эксплуатировать силовую передачу для поддержания целевой дистанции следования между транспортным средством и целевым транспортным средством на основе общей длины транспортного средства и объекта.
2. Транспортное средство по п. 1, в котором контроллер дополнительно запрограммирован, в ответ на температуру тормозов, являющуюся большей чем пороговое значение, деактивировать систему управления скоростью и выводить для отображения предупреждение о температуре тормозов транспортного средства.
3. Транспортное средство по п. 2, в котором температура тормозов выводится из температуры окружающей среды и угла наклона транспортного средства.
4. Транспортное средство по п. 2, в котором температура тормозов выдается датчиком температуры, расположенным ближе к тормозному узлу.
5. Транспортное средство по п. 1, в котором контроллер дополнительно запрограммирован, в ответ на наличие условий, побуждать пользователя через интерфейс пользователя вводить длину объекта.
6. Транспортное средство по п. 5, в котором условия включают в себя по меньшей мере одно из активации буксирного переключателя, присоединения электрического разъема объекта к электрическому разъему прицепа и выявления, датчиком находящегося сзади объекта, объекта в пределах предопределенной дальности сзади транспортного средства.
7. Транспортное средство по п. 1, в котором контроллер дополнительно запрограммирован, в ответ на удовлетворение силовой передачей команды силовой передачи не в пределах ожидаемого периода времени, побуждать пользователя через интерфейс пользователя вводить длину транспортного средства.
8. Транспортное средство, содержащее:
силовую передачу;
систему автоматического регулирования скорости движения; и
контроллер, запрограммированный, в ответ на температуру тормозов, являющуюся большей чем пороговое значение, в то время как система автоматического регулирования скорости движения активирована, а транспортное средство присоединено к прицепу, эксплуатировать силовую передачу для поддержания целевой дистанции следования между транспортным средством и целевым транспортным средством на основании общей длины транспортного средства и объекта так, чтобы скорость транспортного средства убывала, для снижения температуры тормозов.
9. Транспортное средство по п. 8, в котором контроллер дополнительно запрограммирован, в ответ на температуру тормозов, являющуюся большей чем пороговое значение, в то время как система автоматического регулирования скорости движения активирована, а транспортное средство присоединено к прицепу, деактивировать систему автоматического регулирования скорости движения и выводить для отображения предупреждение об автоматическом регулировании скорости движения.
10. Транспортное средство по п. 8, в котором контроллер дополнительно запрограммирован, в ответ на общее время для удовлетворения команды силовой передачи, превышающее пороговое значение, выводить для отображения запроса, чтобы пользователь вводил общую длину транспортного средства.
11. Транспортное средство по п. 8, в котором контроллер дополнительно запрограммирован, в ответ на нажатие тормозной педали, большее чем пороговое положение тормозной педали, и замедление транспортного средства, меньшее чем пороговое замедление, выводить для отображения запрос, чтобы пользователь вводил общую длину транспортного средства.
12. Транспортное средство по п. 8, в котором контроллер дополнительно запрограммирован, в ответ на инерционный отклик транспортного средства, больший чем пороговое значение, выводить для отображения запрос, чтобы пользователь вводил общую длину транспортного средства.
13. Способ управления транспортным средством, содержащий этапы, на которых:
в ответ на активацию системы управления скоростью транспортного средства и условий, указывающих наличие буксируемого объекта, побуждают пользователя, через интерфейс дисплея, ввести совместную длину транспортного средства и буксируемого объекта; и
эксплуатируют транспортное средство для поддержания дистанции следования между транспортным средством и находящимся спереди транспортным средством, которая основана на совместной длине и температуре тормозов.
14. Способ по п. 13, дополнительно состоящий в том, что, в ответ на температуру тормозов, являющуюся большей чем пороговое значение, выводят для отображения предупреждение, указывающее температуру тормозов.
15. Способ по п. 13, дополнительно состоящий в том, что, в ответ на температуру тормозов, являющуюся большей чем пороговое значение, эксплуатируют транспортное средство для снижения скорости транспортного средства.
16. Способ по п. 15, в котором эксплуатация транспортного средства для снижения скорости транспортного средства заключается в том, что замедляют выходной вал по меньшей мере до тех пор, пока температура тормозов не является меньшей чем пороговое значение.
17. Способ по п. 15, в котором эксплуатация транспортного средства для снижения скорости транспортного средства заключается в том, что нажимают аварийный тормоз транспортного средства.
18. Способ по п. 15, в котором эксплуатация транспортного средства для снижения скорости транспортного средства заключается в том, что тормозят двигатель по меньшей мере до тех пор, пока температура тормозов не является меньшей чем пороговое значение.
19. Способ по п. 15, в котором эксплуатация транспортного средства для снижения скорости транспортного средства заключается в том, что ограничивают команду силовой передачи по меньшей мере до тех пор, пока температура тормозов не является меньшей чем пороговое значение.
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| JP 2009280014 A, 03.12.2009 | |||
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| JP 2013164795 A, 22.08.2013 | |||
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |

