Уровень техники
1. Область техники, к которой относится изобретение
[0001] Настоящее описание раскрывает технологию, относящуюся к системе преобразования электрической мощности, которая преобразует электрическую мощность источника мощности постоянного тока в электрическую мощность приведения в действие движущего мотора, и к способу управления системой преобразования электрической мощности.
2. Описание предшествующего уровня техники
[0002] Системы преобразования электрической мощности, которые преобразуют электрическую мощность источника мощности постоянного тока в электрическую мощность приведения в действие движущего мотора, раскрываются в WO 2003/015254 и публикации японской патентной заявки № 2017-093055 (JP 2017-093055 A). Система преобразования электрической мощности из WO 2003/015254 включает в себя повышающий преобразователь, который повышает электрическую мощность источника мощности постоянного тока, и инвертор, который преобразует повышенную электрическую мощность постоянного тока в электрическую мощность переменного тока. Система преобразования электрической мощности из JP 2017-093055 A включает в себя первый преобразователь напряжения, который повышает напряжение первого источника мощности постоянного тока, второй преобразователь напряжения, который понижает напряжение второго источника мощности постоянного тока, и инвертор, который преобразует электрическую мощность, выводимую от первого и второго преобразователей напряжения, в электрическую мощность переменного тока. И повышающие преобразователи из WO 2003/015254, и первый и второй преобразователи напряжения из JP 2017-093055 A являются преобразователями с прерывателем, включающими в себя переключающий элемент для преобразования мощности и дроссель.
Сущность изобретения
[0003] Поскольку большой ток протекает в системе преобразования электрической мощности для электрического транспортного средства, величина формирования тепла в системе преобразования электрической мощности является большой. Когда ток или электрическая мощность, подаваемая к движущему мотору, является большой, в частности, ток, протекающий в систему преобразования электрической мощности, также становится большим. Следовательно, величина формирования тепла увеличивается. Преобразователь напряжения с прерывателем формирует пульсирующий ток с помощью включения-выключения переключающего элемента, и сам переключающий элемент и дроссель формируют тепло. Настоящее изобретение относится к системе преобразования электрической мощности, которая преобразует электрическую мощность источника мощности постоянного тока в электрическую мощность приведения в действие движущего мотора, система преобразования электрической мощности сдерживает величину формирования тепла, когда ток или электрическая мощность, подаваемая к движущему мотору, является большой.
[0004] Первый аспект настоящего изобретения является системой преобразования электрической мощности, которая преобразует электрическую мощность источника мощности постоянного тока в электрическую мощность приведения в действие движущего мотора. Система преобразования электрической мощности включает в себя: инвертор; преобразователь напряжения; и контроллер. Инвертор выполнен с возможностью подавать электрическую мощность переменного тока к движущему мотору. Преобразователь напряжения включает в себя высоковольтный конец, соединенный с источником мощности постоянного тока, и низковольтный конец, соединенный с инвертором. Преобразователь напряжения включает в себя переключающие элементы и дроссель и выполнен с возможностью понижать напряжение источника мощности постоянного тока и подавать напряжение источника мощности постоянного тока к инвертору. Контроллер выполнен с возможностью управлять преобразователем напряжения. Контроллер выполнен с возможностью управлять переключающими элементами так, что напряжение низковольтного конца становится ниже напряжения высоковольтного конца в первом состоянии. Первое состояние является, по меньшей мере, одним состоянием из состояния, когда ток, протекающий к инвертору, меньше предписанного порогового значения тока, и состояния, когда электрическая мощность, потребляемая в движущем моторе, меньше предписанного порогового значения электрической мощности. Контроллер выполнен с возможностью управлять переключающими элементами так, что напряжение низковольтного конца становится равным напряжению высоковольтного конца во втором состоянии. Второе состояние является, по меньшей мере, одним состоянием из состояния, когда ток, протекающий к инвертору, больше предписанного порогового значения тока, и состояния, когда электрическая мощность, потребляемая в движущем моторе, больше предписанного порогового значения электрической мощности. Фраза "меньше порогового значения" может быть "равной или меньше порогового значения". Фраза "больше порогового значения" может быть "равной или больше порогового значения".
[0005] С такой конфигурацией, контроллер системы преобразования электрической мощности управляет преобразователем напряжения так, что напряжение на низковольтном конце становится равным напряжению на высоковольтном конце, когда ток, протекающий к инвертору, или электрическая мощность, потребляемая в движущем моторе, больше порогового значения. В случае преобразователя напряжения с прерывателем, напряжение на высоковольтном конце может быть отрегулировано, чтобы быть равным напряжению на низковольтном конце, посредством удержания переключающего элемента, который задействуется в понижении напряжения, во включенном состоянии (в случае двунаправленного DC-DC-преобразователя, переключающий элемент, задействуемый в понижении напряжения, удерживается во включенном состоянии, в то время как переключающий элемент, задействуемый в повышении, удерживается в выключенном состоянии). Это позволяет предотвращать формирование пульсирующего тока и сдерживать формирование тепла в переключающих элементах и дросселе.
[0006] В системе преобразования электрической мощности предписанное пороговое значение тока и предписанное пороговое значение электрической мощности могут быть определены на основе скорости вращения и выходного крутящего момента движущего мотора. В целом, характеристики мотора выражаются графиком, называемым TN-диаграммой. TN-диаграмма является графиком, когда горизонтальная ось указывает скорость вращения мотора, а вертикальная ось указывает выходной крутящий момент мотора. На TN-диаграмме может быть нанесена кривая постоянной выходной электрической мощности мотора. Когда вышеописанное пороговое значение выражается с помощью единицы электрической мощности, пороговое значение может быть выражено как кривая на TN-диаграмме. С такой конфигурацией, пороговое значение определяется на основе скорости вращения и выходного крутящего момента движущего мотора, пороговое значение электрической мощности может быть вычислено из целевой скорости вращения и целевого крутящего момента.
[0007] В системе преобразования электрической мощности преобразователь напряжения может быть двунаправленным DC-DC-преобразователем, включающим в себя функцию понижения напряжения для понижения напряжения высоковольтного конца и вывода напряжения высоковольтного конца с низковольтного конца и функцию повышения для повышения напряжения низковольтного конца и вывода напряжения низковольтного конца с высоковольтного конца. Низковольтный конец преобразователя напряжения может быть соединен с зарядным портом. С такой конфигурацией, когда источник мощности постоянного тока является перезаряжаемой аккумуляторной батареей, напряжение внешнего источника мощности повышается с помощью преобразователя напряжения, включенного в систему преобразования электрической мощности, и используется для заряда аккумуляторной батареи. Это устраняет необходимость в регуляторе напряжения для внешнего источника мощности.
[0008] В системе преобразования электрической мощности контроллер может быть выполнен с возможностью управлять переключающими элементами так, что напряжение низковольтного конца становится равным напряжению высоковольтного конца в пятом состоянии независимо от величины тока, протекающего к инвертору, или электрической мощности, потребляемой в движущем моторе. Пятое состояние может быть, по меньшей мере, одним состоянием из состояния, когда температура переключающих элементов превышает первое предписанное пороговое значение температуры, и состояния, когда температура дросселя превышает второе предписанное пороговое значение температуры. Термины "первое предписанное пороговое значение температуры и второе предписанное пороговое значение температуры" ссылаются на защитные температуры для того, чтобы предотвращать поломку переключающих элементов и дросселя. С такой конфигурацией, переключающие элементы или дроссель могут быть предохранены от перегрева независимо от величины тока, протекающего к инвертору, или электрической мощности, потребляемой в движущем моторе.
[0009] В системе преобразования электрической мощности преобразователь напряжения может включать в себя полупроводниковый элемент, подключенный между линией положительного электрода и линией отрицательного электрода, и устройство защиты от перегрузки по току, подключенное последовательно с полупроводниковым элементом. С такой конфигурацией, даже когда полупроводниковый элемент замыкается накоротко, устройство защиты от перегрузки по току отделяет полупроводниковый элемент, так что короткое замыкание может быть нейтрализовано. Когда устройство защиты от перегрузки по току срабатывает, операция понижения посредством преобразователя напряжения становится неработоспособной. Однако, напряжение, такое же, что и входное напряжение, может все еще выводиться. Т.е., даже после того как устройство защиты от перегрузки по току срабатывает, возможно сохранять приведение в действие движущего мотора.
[0010] В системе преобразования электрической мощности ток магнитного насыщения дросселя может быть меньше максимального входного тока инвертора. Другими словами, поскольку дроссель не используется, когда ток является большим, большой по размеру дроссель, который функционирует, когда входной ток инвертора является максимальным, не требуется.
[0011] В системе преобразования электрической мощности преобразователь напряжения может включать в себя первый полупроводниковый модуль, который размещает переключающие элементы. Инвертор может включать в себя вторые полупроводниковые модули, которые размещают переключающие элементы для преобразования мощности. Дроссель может быть предусмотрен между первым полупроводниковым модулем и вторыми полупроводниковыми модулями. С такой конфигурацией, электрическая шина, которая соединяет первый полупроводниковый модуль и второй полупроводниковый модуль с дросселем, легко прокладывается.
[0012] Второй аспект настоящего изобретения является способом управления системой преобразования электрической мощности. Система преобразования электрической мощности включает в себя: инвертор; преобразователь напряжения; и контроллер. Инвертор выполнен с возможностью подавать электрическую мощность переменного тока к движущему мотору. Преобразователь напряжения имеет высоковольтный конец, соединенный с источником мощности постоянного тока, и низковольтный конец, соединенный с инвертором. Преобразователь напряжения включает в себя переключающие элементы и дроссель и выполнен с возможностью понижать напряжение источника мощности постоянного тока и подавать напряжение источника мощности постоянного тока инвертору. Контроллер выполнен с возможностью управлять преобразователем напряжения. Способ управления включает в себя: управление, посредством контроллера, переключающими элементами так, что напряжение низковольтного конца становится ниже напряжения высоковольтного конца в первом состоянии, первое состояние является, по меньшей мере, одним состоянием из состояния, когда ток, протекающий к инвертору, меньше предписанного порогового значения тока, и состояния, когда электрическая мощность, потребляемая в движущем моторе, меньше предписанного порогового значения электрической мощности; и управление, посредством контроллера, переключающими элементами так, что напряжение низковольтного конца становится равным напряжению высоковольтного конца во втором состоянии, второе состояние является, по меньшей мере, одним состоянием из состояния, когда ток, протекающий к инвертору, больше предписанного порогового значения тока, и состояния, когда электрическая мощность, потребляемая в движущем моторе, больше предписанного порогового значения электрической мощности.
Краткое описание чертежей
[0013] Признаки, преимущества и техническое и промышленное значение примерных вариантов осуществления изобретения будут описаны ниже со ссылкой на сопровождающие чертежи, на которых аналогичные номера обозначают аналогичные элементы, и на которых:
Фиг. 1 - это блок-схема, показывающая систему электрической мощности электрического транспортного средства, включающего в себя систему преобразования электрической мощности первого варианта осуществления;
Фиг. 2 - это блок-схема последовательности операций процесса определения выходного напряжения преобразователя напряжения;
Фиг. 3 - это один пример TN-диаграммы мотора;
Фиг. 4 - это один пример карты выходного напряжения преобразователя напряжения;
Фиг. 5 - это график, показывающий один пример характеристик дросселя;
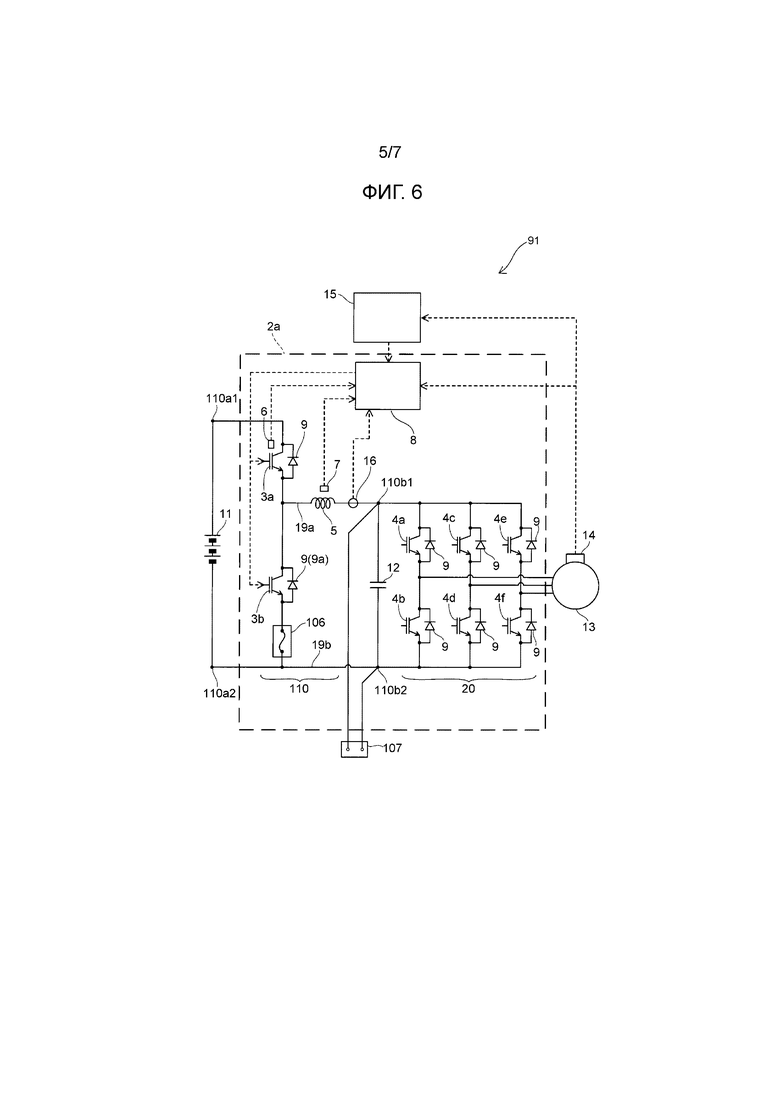
Фиг. 6 - это блок-схема, показывающая систему электрической мощности электрического транспортного средства, включающего в себя систему преобразования электрической мощности второго варианта осуществления;
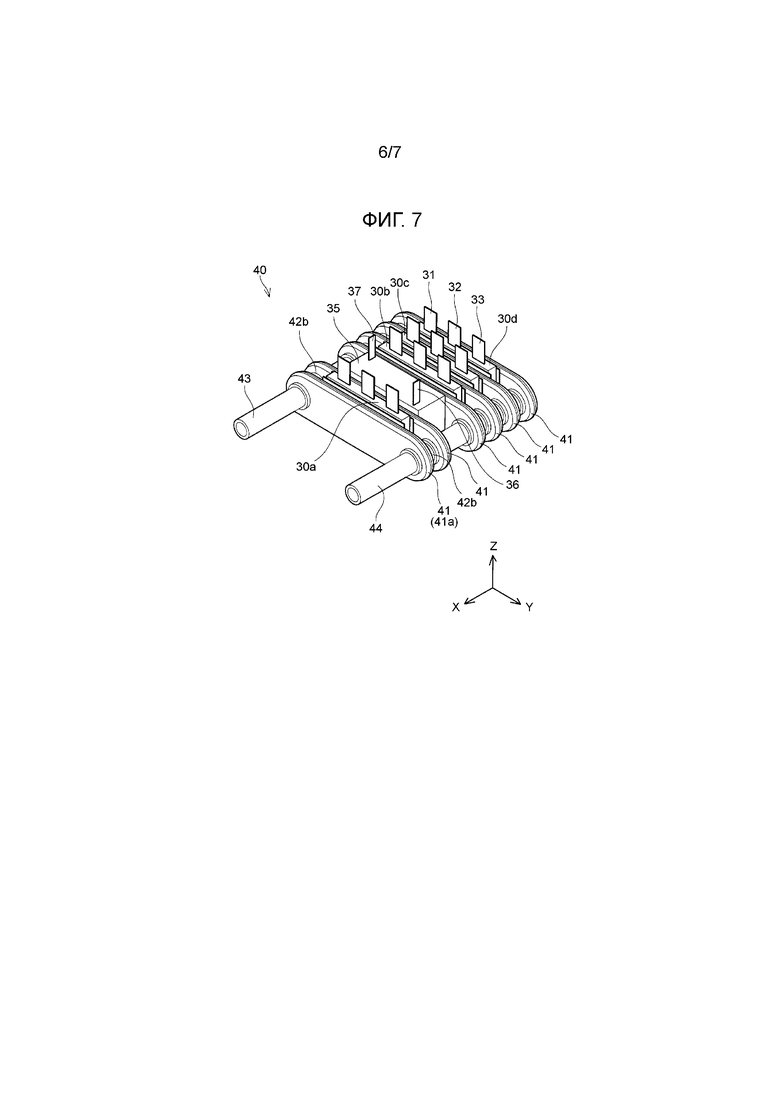
Фиг. 7 - это общий вид пакетного блока, включающего в себя объединение переключающих элементов и дросселя; и
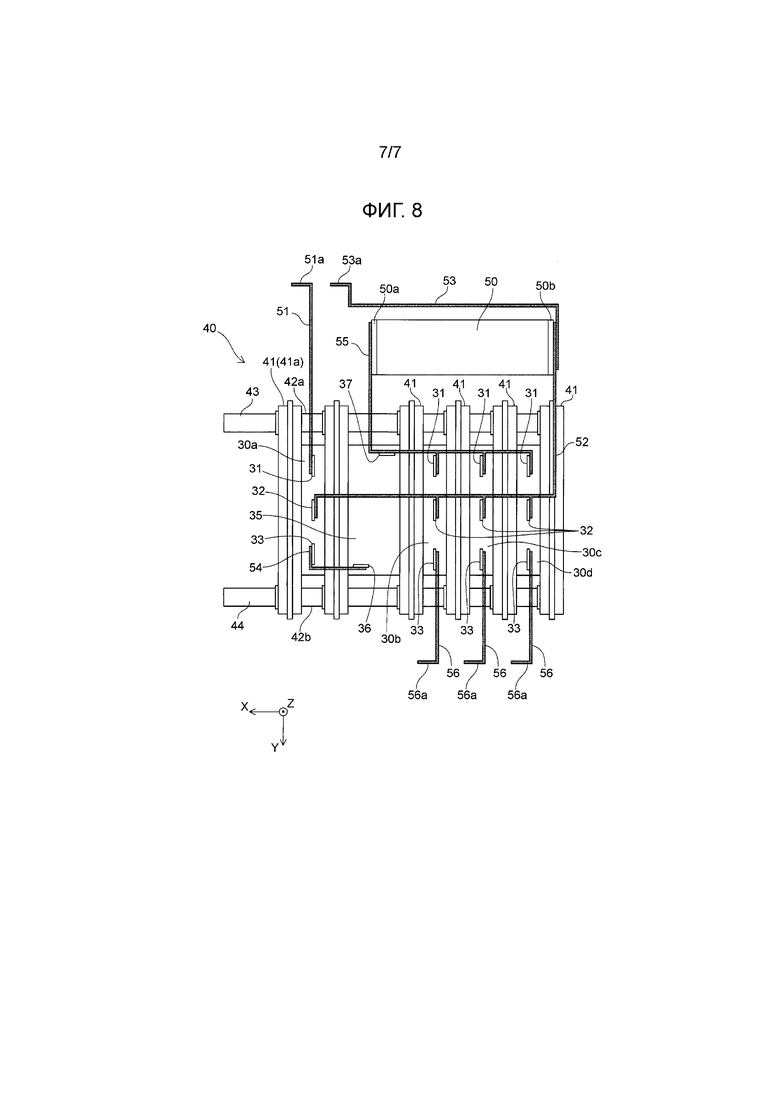
Фиг. 8 - это вид в плане пакетного блока.
Подробное описание вариантов осуществления
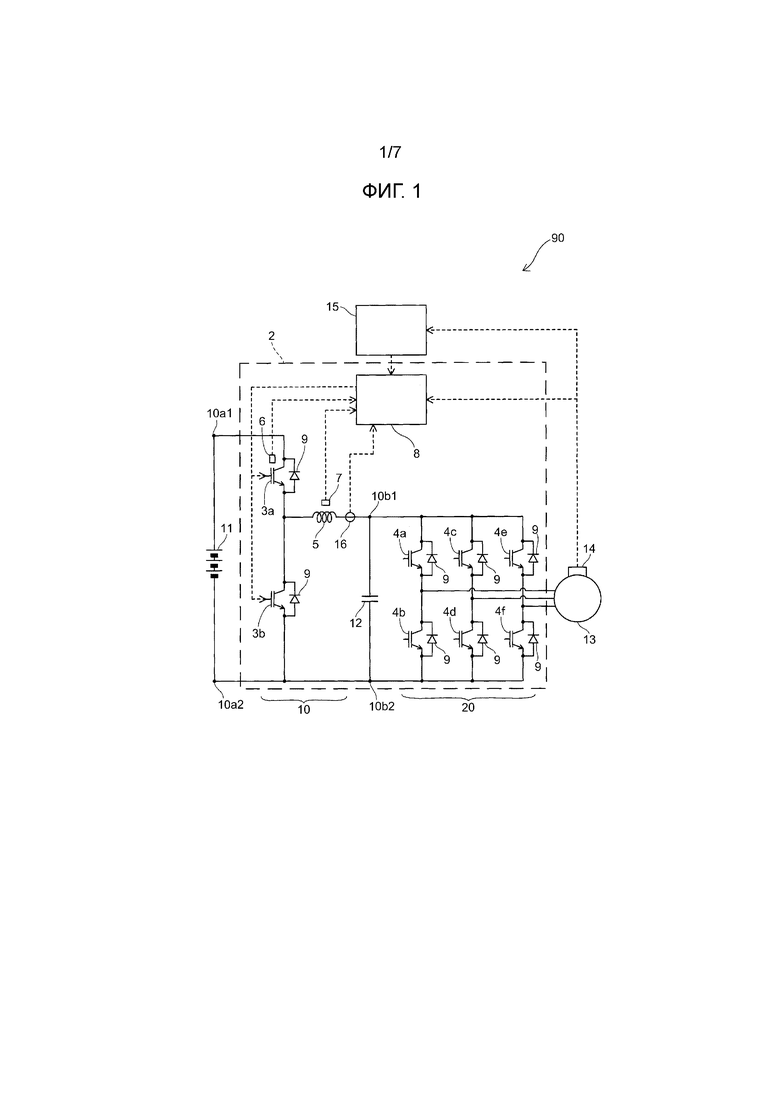
[0014] Со ссылкой на фиг. 1-5 будет описана система 2 преобразования электрической мощности первого варианта осуществления. Фиг. 1 показывает блок-схему, показывающую систему электрической мощности электрического транспортного средства 90, включающего в себя систему 2 преобразования электрической мощности. Электрическое транспортное средство 90 варианта осуществления включает в себя аккумулятор 11, систему 2 преобразования электрической мощности, контроллер 15 высокого порядка и движущий мотор 13. Электрическое транспортное средство 90 движется посредством приведения в действие мотора 13 с помощью электрической мощности аккумулятора 11. Система 2 преобразования электрической мощности подключается между аккумулятором 11 и мотором 13. Система 2 преобразования электрической мощности преобразует электрическую мощность постоянного тока, выводимую из аккумулятора 11, в электрическую мощность переменного тока, подходящую для приведения в действие мотора 13.
[0015] Система 2 преобразования электрической мощности включает в себя схему 10 преобразователя напряжения, схему 20 инвертора и контроллер 8 электрической мощности.
[0016] Сначала, будет описана схема 10 преобразователя напряжения. Схема 10 преобразователя напряжения имеет высоковольтные концы (положительный электрод 10a1 высоковольтного конца, отрицательный электрод 10a2 высоковольтного конца), соединенные с аккумулятором 11. Схема 10 преобразователя напряжения имеет низковольтные концы (положительный электрод 10b1 низковольтного конца, отрицательный электрод 10b2 низковольтного конца), соединенные со схемой 20 инвертора. Для удобства описания комплект из положительного электрода 10a1 высоковольтного конца и отрицательного электрода 10a2 высоковольтного конца называется высоковольтным концом 10a, а комплект из положительного электрода 10b1 низковольтного конца и отрицательного электрода 10b2 низковольтного конца называется низковольтным концом 10b.
[0017] Схема 10 преобразователя напряжения имеет функцию понижения для понижения напряжения, прикладываемого к высоковольтному концу 10a, и вывода пониженного напряжения к низковольтному концу 10b и функцию повышения для повышения напряжения, прикладываемого к низковольтному концу 10b, и вывода повышенного напряжения к высоковольтному концу 10a. Т.е., схема 10 преобразователя напряжения является двунаправленным DC-DC-преобразователем. Напряжение, приложенное к низковольтному концу 10b, является напряжением электрической мощности (рекуперативной электрической мощности), получаемой, когда мотор 13 приводится в движение в обратном направлении с помощью энергии замедления транспортного средства.
[0018] Хотя напряжение приведения в действие мотора 13 изменяется в зависимости от приведения в действие акселератора водителем (величины срабатывания акселератора) или т.п., максимальное напряжение приведения в действие является равным выходному напряжению аккумулятора 11. Т.е., мотор 13 работает при напряжении, равном или меньше выходного напряжения аккумулятора 11. Напряжение приведения в действие мотора 13 определяется по величине срабатывания акселератора или т.п. Например, когда величина срабатывания акселератора является большой, напряжение приведения в действие мотора 13 увеличивается, в то время как, когда величина срабатывания акселератора является небольшой, напряжение приведения в действие также уменьшается. Когда правильное напряжение приведения в действие мотора 13 ниже выходного напряжения аккумулятора 11, контроллер 8 электрической мощности приводит в действие схему 10 преобразователя напряжения, чтобы понижать выходное напряжение аккумулятора 11 и подавать пониженное напряжение к схеме 20 инвертора.
[0019] Будет описана конфигурация схемы для схемы 10 преобразователя напряжения. Два переключающих элемента 3a, 3b соединяются последовательно между положительным электродом 10a1 высоковольтного конца и отрицательным электродом 10a2 высоковольтного конца. Переключающие элементы 3a, 3b соединяются обратно параллельно диодам 9, соответственно. Между средней точкой последовательного соединения двух переключающих элементов 3a, 3b и положительным электродом 10b1 низковольтного конца подключается дроссель 5. Отрицательный электрод 10b2 низковольтного конца и отрицательный электрод 10a2 высоковольтного конца соединяются напрямую. Как показано на фиг. 1, схема 10 преобразователя напряжения имеет тип прерывателя, включающий в себя переключающие элементы 3a, 3b и дроссель 5.
[0020] Переключающие элементы 3a, 3b взаимодополняемым образом работают так, что один элемент включается, когда другой элемент выключается. Переключающий элемент 3a задействуется в операции понижения, в то время как переключающий элемент 3b задействуется в операции повышения. Схема 10 преобразователя напряжения работает так, что отношение напряжений между высоковольтным концом 10a и низковольтным концом 10b становится целевым соотношением напряжений. Направление протекания тока определяется в зависимости от баланса между напряжением на стороне высоковольтного конца 10a и напряжением на стороне низковольтного конца 10b.
[0021] Контроллер 8 электрической мощности управляет переключающими элементами 3a, 3b. На фиг. 1 штриховые стрелки представляют сигнальные линии. Схема 10 преобразователя напряжения включает в себя датчик 6 температуры, который измеряет температуру переключающего элемента 3a, датчик 7 температуры, который измеряет температуру дросселя 5, и датчик 16 тока, который измеряет ток, протекающий через дроссель 5. Данные измерений посредством датчиков 6, 7 температуры и датчика 16 тока отправляются контроллеру 8 электрической мощности. Контроллер 8 электрической мощности регулирует ток, протекающий через схему 10 преобразователя напряжения, чтобы предохранять переключающий элемент 3a и дроссель 5 от перегрева.
[0022] Будет описана схема 20 инвертора. Схема 20 инвертора включает в себя шесть переключающих элементов 4a-4f и шест диодов 9. Диоды 9 соединятся обратно параллельно переключающим элементам 4a-4f, соответственно. Шесть переключающих элементов 4a-4f располагаются парами, чтобы формировать последовательные соединения. Три последовательных соединения соединяются параллельно. Когда переключающие элементы 4a-4f правильно повторяют операцию включения-выключения, переменный ток выводится из средних точек соответствующих последовательных соединений. Контроллер 8 электрической мощности также управляет шестью переключающими элементами 4a-4f. На фиг. 1 иллюстрация сигнальных линий от контроллера 8 электрической мощности к переключающим элементам 4a-4f пропускается.
[0023] Между схемой 10 преобразователя напряжения и схемой 20 инвертора сглаживающий конденсатор 12 соединяется параллельно. Другими словами, сглаживающий конденсатор 12 соединяется между положительным электродом 10b1 низковольтного конца и отрицательным электродом 10b2 низковольтного конца схемы 10 преобразователя напряжения. Сглаживающий конденсатор 12 пресекает пульсацию тока, протекающего между схемой 10 преобразователя напряжения и схемой 20 инвертора.
[0024] Мотор 13 оборудуется датчиком 14 скорости вращения, который измеряет скорость вращения мотора 13. Данные измерений датчика 14 скорости вращения также отправляются контроллеру 8 электрической мощности. Контроллер 8 электрической мощности управляет переключающими элементами схемы 10 преобразователя напряжения и схемы 20 инвертора также с учетом скорости вращения мотора 13, измеренной с помощью датчика 14 скорости вращения.
[0025] Контроллер 8 электрической мощности соединяется с контроллером 15 высокого порядка. Контроллер 15 высокого порядка определяет целевой выходной крутящий момент мотора 13 на основе информации, такой как величина срабатывания акселератора. Целевой выходной крутящий момент отправляется контроллеру 8 электрической мощности.
[0026] Как изложено ранее, напряжение приведения в действие мотора 13 является равным или меньше выходного напряжения аккумулятора 11. При приеме целевого выходного крутящего момента контроллер 8 электрической мощности определяет целевое напряжение схемы 10 преобразователя напряжения и целевую частоту выходного переменного тока схемы 20 инвертора. Контроллер 8 электрической мощности управляет переключающими элементами 3a, 3b схемы 10 преобразователя напряжения и переключающими элементами 4a-4f схемы 20 инвертора, так что определенное целевое напряжение и целевая частота достигаются. Переключающие элементы 3a, 3b и дроссель 5 формируют большое количество тепла. Контроллер 8 электрической мощности управляет переключающими элементами 3a, 3b так, чтобы предохранять переключающие элементы 3a, 3b (переключающий элемент 3a, который задействуется в понижении напряжения, в частности) и дроссель 5 от перегрева. Когда электрическая мощность, потребляемая в моторе 13, превышает предписанное пороговое значение (пороговое значение Pth электрической мощности), контроллер 8 электрической мощности управляет схемой 10 преобразователя напряжения так, что напряжение низковольтного конца 10b становится равным напряжению высоковольтного конца 10a. В частности, контроллер 8 электрической мощности удерживает переключающий элемент 3a во включенном состоянии, в то же время удерживая переключающий элемент 3b в выключенном состоянии. В результате, положительный электрод 10a1 высоковольтного конца и положительный электрод 10b1 низковольтного конца находятся в соединенном состоянии все время, так что напряжения на обоих концах становятся равными.
[0027] Предпочтительное напряжение приведения в действие мотора 13 изменяется величиной срабатывания акселератора или т.п. В системе 2 преобразования электрической мощности варианта осуществления приоритет отдается предохранению переключающего элемента 3a и дросселя 5 от перегрева. Когда большая электрическая мощность ожидается протекающей в переключающем элементе 3a или дросселе 5, переключающий элемент 3a удерживается во включенном состоянии, в то время как переключающий элемент 3b удерживается в выключенном состоянии. Следовательно, пульсация тока, связанная с включением-выключением переключающих элементов 3a, 3b, устраняется, и формирование тепла в переключающем элементе 3a и дросселе 5 сдерживается.
[0028] Контроллер 8 электрической мощности постоянно наблюдает за температурой переключающего элемента 3a и температурой дросселя 5 с помощью датчиков 6, 7 температуры. Когда температура переключающего элемента 3a или дросселя 5 превышает пороговое значение температуры, контроллер 8 электрической мощности удерживает переключающий элемент 3a во включенном состоянии, в то же время удерживая переключающий элемент 3b в выключенном состоянии независимо от величины электрической мощности, потребляемой в моторе 13. Т.е., контроллер 8 электрической мощности управляет переключающими элементами 3a, 3b так, что напряжение высоковольтного конца 10a и напряжение низковольтного конца 10b становятся равными. Это позволяет предотвращать дополнительное увеличение температуры переключающего элемента 3a и дросселя 5.
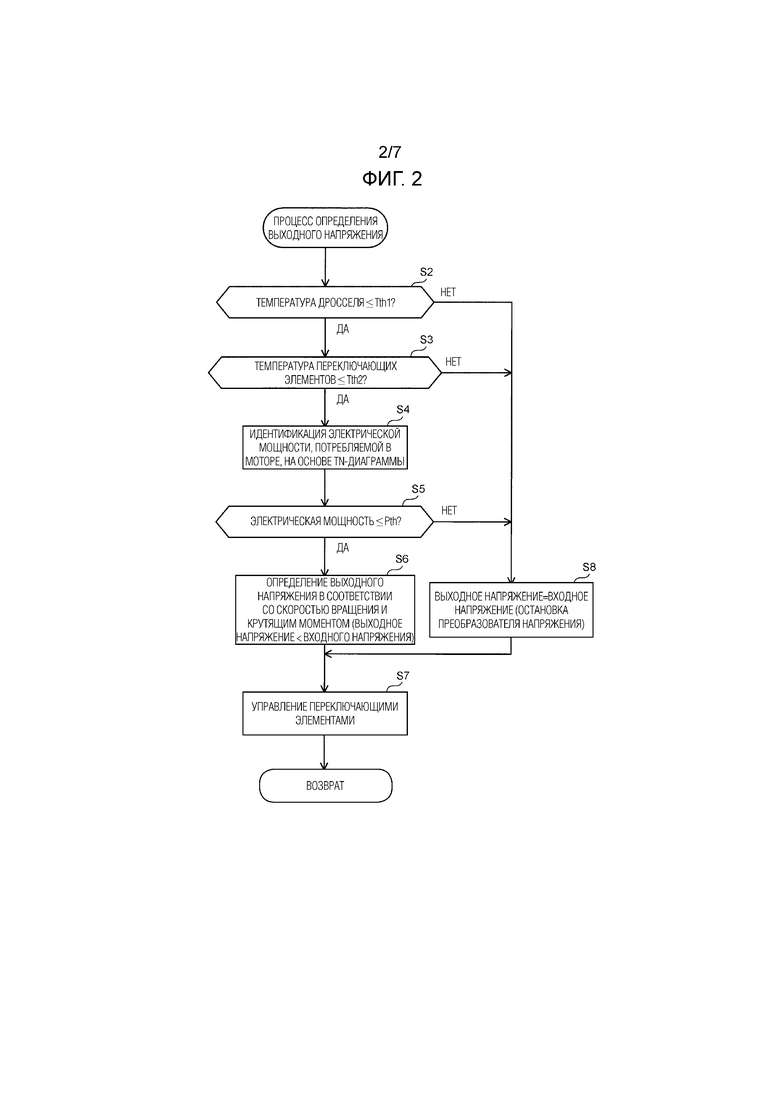
[0029] Фиг. 2 показывает блок-схему последовательности операций процесса определения выходного напряжения, выполняемого посредством контроллера 8 электрической мощности. Процесс контроллера 8 электрической мощности будет описан со ссылкой на фиг. 2. Процесс на фиг. 2 выполняется периодическим образом.
[0030] Контроллер 8 электрической мощности получает данные от датчиков 6, 7 температуры и сравнивает данные с пороговым значением температуры. В частности, контроллер 8 электрической мощности сравнивает температуру, измеренную посредством датчика 7 температуры (т.е., температуру дросселя 5), с первым пороговым значением Tth1 температуры (этап S2). Когда температура дросселя 5 превышает первое пороговое значение Tth1 температуры (этап S2: Нет), контроллер 8 электрической мощности переходит к процессу этапа S8. На этапе S8 контроллер 8 электрической мощности устанавливает, в качестве выходного напряжения, значение, такое же, что и входное напряжение. Контроллер 8 электронной мощности затем управляет переключающими элементами 3a, 3b (этап S7). Как описано ранее, когда этап S8 выполняется, контроллер 8 электрической мощности удерживает переключающий элемент 3a во включенном состоянии и удерживает переключающий элемент 3b в выключенном состоянии на этапе S7.
[0031] Когда температура дросселя равна или меньше первого порогового значения Tth1 температуры (этап S2: Да), контроллер 8 электрической мощности сравнивает температуру, измеренную посредством датчика 6 температуры (т.е., температуру переключающего элемента 3a) со вторым пороговым значением Tth2 температуры (этап S3). Когда температура переключающего элемента 3a превышает второе пороговое значение Tth2 температуры, контроллер 8 электрической мощности устанавливает, в качестве выходного напряжения, значение, такое же, что и входное напряжение, как в случае этапа S2 (этап S3: Нет, S8).
[0032] Когда температура переключающего элемента 3a равна или меньше второго порогового значения Tth2 температуры (этап S3: Да), контроллер 8 электрической мощности идентифицирует электрическую мощность, потребляемую в моторе 13, на основе TN-диаграммы (этап S4). Когда электрическая мощность, потребляемая в моторе 13, превышает предписанное пороговое значение Pth электрической мощности (этап S5: Нет, S8), контроллер 8 электрической мощности устанавливает, в качестве выходной электрической мощности, значение, такое же, что и входная электрическая мощность.
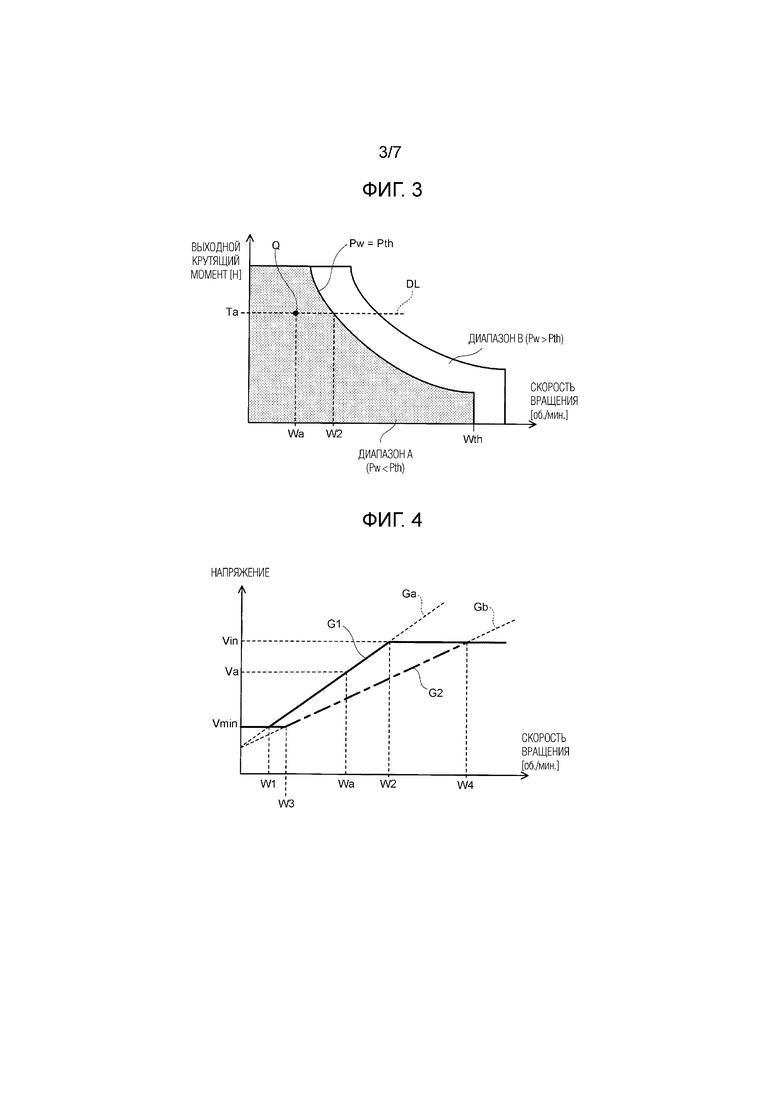
[0033] Будет описан процесс этапа S4, S5. Фиг. 3 является TN-диаграммой, имеющей горизонтальную ось, указывающую скорость вращения мотора 13, и вертикальную ось, указывающую выходной крутящий момент мотора 13. Когда текущая скорость вращения мотора 13 и целевой выходной крутящий момент мотора 13 определены, идентифицируется позиция на графике на фиг. 3. В TN-диаграмме могут быть изображены линии равной электрической мощности. В TN-диаграмме на фиг. 3 изображается кривая электрической мощности Pw=пороговое значение Pth электрической мощности. Диапазон A на фиг. 3 (серый диапазон) представляет диапазон, где выходная электрическая мощность Pw мотора 13 относительно целевого выходного крутящего момента меньше порогового значения Pth электрической мощности. Диапазон B представляет диапазон, где выходная электрическая мощность Pw мотора 13 относительно целевого выходного крутящего момента больше порогового значения Pth электрической мощности. Выходная электрическая мощность Pw мотора 13 является равной электрической мощности, потребляемой в моторе 13. Контроллер 8 электрической мощности обращается к TN-диаграмме, чтобы проверять, превышает или нет выходная электрическая мощность Pw мотора 13 пороговое значение Pth электрической мощности, на основе целевой выходной мощности и текущей скорости вращения мотора 13. Когда выходная электрическая мощность Pw мотора 13 (т.е., электрическая мощность, потребляемая в моторе 13) превышает пороговое значение Pth электрической мощности, контроллер 8 электрической мощности устанавливает, в качестве выходного напряжения схемы 10 преобразователя напряжения, значение, такое же, что и входное напряжение (этап S5: Нет, S8). В таком случае, как описано выше, контроллер 8 электрической мощности удерживает переключающий элемент 3a во включенном состоянии, в то же время удерживая переключающий элемент 3b в выключенном состоянии в процессе этапа S7.
[0034] Когда электрическая мощность Pw, потребляемая в моторе 13, не превышает пороговое значение Pth электрической мощности (этап S5: Да), контроллер 8 электрической мощности определяет выходное напряжение схемы 10 преобразователя напряжения на основе скорости вращения мотора 13 (этап S6).
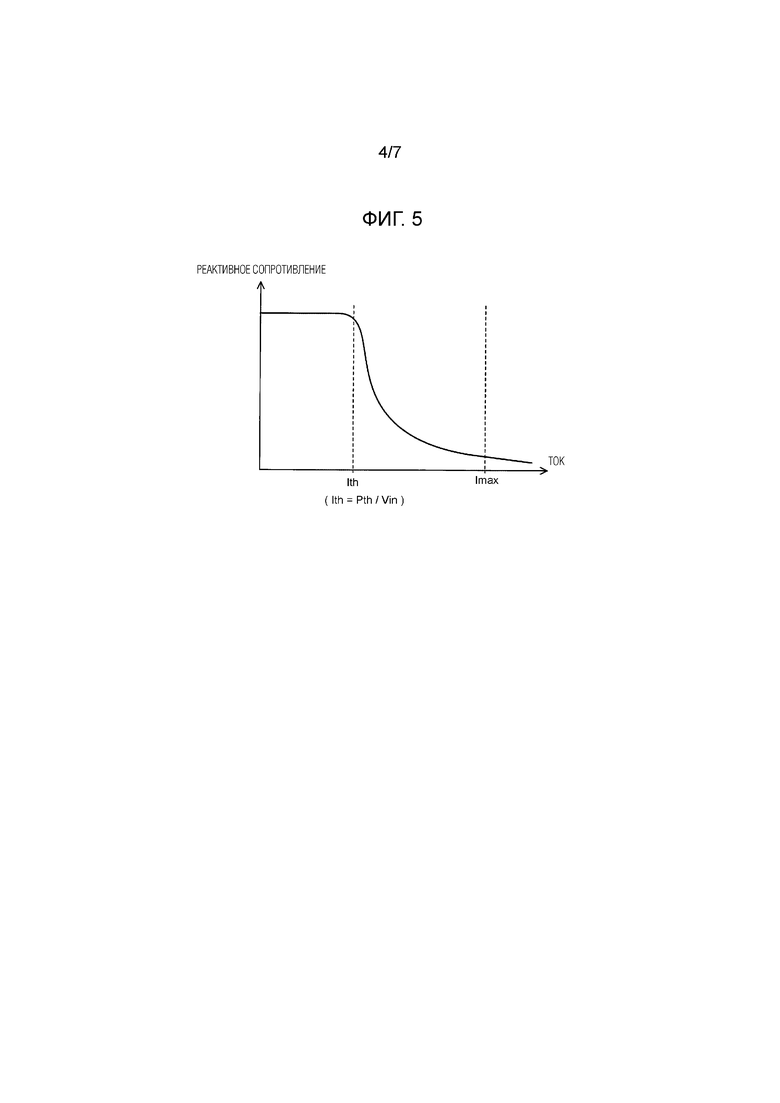
[0035] Процесс определения выходного напряжения будет описан со ссылкой на фиг. 3 и 4. Контроллер 8 электрической мощности хранит карту (карту выходного напряжения), которая определяет соотношение между скоростью вращения мотора 13 с выходным крутящим моментом, являющимся постоянным, и выходным напряжением схемы 10 преобразователя напряжения. Фиг. 4 показывает один пример карты выходного напряжения. Горизонтальная ось на фиг. 4 представляет скорость вращения мотора 13, а вертикальная ось представляет выходное напряжение схемы 10 преобразователя напряжения. Например, когда скорость вращения в текущее время равна Wa, и целевой выходной крутящий момент мотора 13 равен Ta, точка Q может быть идентифицирована на TN-диаграмме на фиг. 3. Прерывистая линия DL на фиг. 3 является линией, протягивающейся через точку Q с выходным крутящим моментом, являющимся постоянным при Ta. Карта, которая определяет соотношение между скоростью вращения и выходным напряжением на этой линии, является картой на фиг. 4. Карта, такая же, что и на фиг. 4, подготавливается для каждого выходного крутящего момента для контроллера 8 электрической мощности.
[0036] Предоставляется описание карты на фиг. 4. График G1 толстой линией определяет выходное напряжение схемы 10 преобразователя напряжения относительно скорости вращения мотора 13. График Ga пунктирной линией представляет напряжение, требуемое для фазового управления с максимальной эффективностью для мотора 13. Напряжение, требуемое для фазового управления с максимальной эффективностью, является пропорциональным скорости вращения мотора 13, как показано посредством графика Ga. В этом примере, в то время как скорость вращения мотора 13 находится в диапазоне от W1 до W2, выходное напряжение схемы 10 преобразователя напряжения определяется в соответствии со скоростью вращения мотора 13 на графике Ga (напряжение, требуемое для фазового управления с максимальной эффективностью). Например, когда скорость вращения мотора 13 равна Wa, выходное напряжение схемы 10 преобразователя напряжения определяется как напряжение Va из графика G1.
[0037] Напряжение Vmin является минимальным напряжением, которое может устойчиво выводиться посредством схемы 10 преобразователя напряжения. Следовательно, когда скорость вращения ниже W1, выходное напряжение схемы 10 преобразователя напряжения устанавливается в напряжение Vmin. В диапазоне, где электрическая мощность, потребляемая в моторе 13, меньше порогового значения Pth электрической мощности, выходное напряжение схемы 10 преобразователя напряжения становится значением ниже входного напряжения.
[0038] Диапазон, где скорость вращения больше W2, принадлежит диапазону B на фиг. 3. В диапазоне B, как описано ранее, выходное напряжение схемы 10 преобразователя напряжения определяется как входное напряжение Vin независимо от электрической мощности, потребляемой в моторе 13. Входное напряжение Vin является равным выходному напряжению аккумулятора 11.
[0039] В вышеприведенном примере выходное напряжение схемы 10 преобразователя напряжения определяется на основе напряжения, требуемого для фазового управления с максимальной эффективностью для мотора 13. Выходное напряжение схемы 10 преобразователя напряжения может быть определено на основе напряжения, требуемого для управления с ослаблением поля вместо фазового управления с максимальной эффективностью. Напряжение, требуемое для управления с ослаблением поля, также является пропорциональным скорости вращения мотора 13. График Gb на фиг. 4 представляет напряжение мотора 13, требуемое для управления с ослаблением поля. Выходное напряжение может быть определено как пропорциональное скорости вращения мотора 13 вместе с графиком Gb. Однако, минимальное значение выходного напряжения все еще является напряжением Vmin, и максимальное значение является напряжением Vin.
[0040] Рассмотрим блок-схему последовательности операций на фиг. 2 снова. После того как выходное напряжение определено на этапе S6, контроллер 8 электронной мощности управляет переключающими элементами 3a, 3b схемы 10 преобразователя напряжения, так что достигается определенное выходное напряжение.
[0041] Когда электрическая мощность, подаваемая к мотору 13 (т.е., электрическая мощность Pa, потребляемая в моторе 13), превышает пороговое значение Pth электрической мощности, схема 10 преобразователя напряжения удерживает переключающий элемент 3a во включенном состоянии, в то же время удерживая переключающий элемент 3b в выключенном состоянии, так что выходная электрическая мощность может становиться равной входной электрической мощности. В результате, предотвращается протекание пульсирующего тока к переключающему элементу 3a и дросселю 5, и, таким образом, формирование тепла пресекается. Когда электрическая мощность, потребляемая в моторе 13, меньше порогового значения Pth электрической мощности, контроллер 8 электрической мощности управляет переключающими элементами 3a, 3b, так что выходное напряжение схемы 10 преобразователя напряжения становится ниже входного напряжения. Система 2 преобразования электрической мощности варианта осуществления может пресекать формирование тепла, удерживая переключающий элемент 3a во включенном состоянии, когда большая электрическая мощность подается к мотору 13.
[0042] Теперь будут описаны характеристики дросселя 5. Фиг. 5 показывает график, когда горизонтальная ось указывает ток, протекающий к дросселю 5, а вертикальная ось указывает реактивное сопротивление дросселя 5. Реактивное сопротивление дросселя быстро понижается при предписанном значении тока. Значение тока, при котором реактивное сопротивление быстро понижается, является током Ith магнитного насыщения. Ток Imax на фиг. 5 является максимальным током, который протекает к мотору 13. Ток Ith магнитного насыщения дросселя 5, используемого для системы 2 преобразования электрической мощности варианта осуществления, может быть меньше тока Imax, протекающего к мотору 13. Это обусловлено тем, что дросселю 5 не нужно функционировать, когда большая электрическая мощность протекает к мотору 13. Схема 10 преобразователя напряжения удерживает переключающий элемент 3a во включенном состоянии, когда электрическая мощность, потребляемая в моторе 13, превышает пороговое значение Pth электрической мощности. Когда электрическая мощность, потребляемая в моторе 13, является пороговым значением Pth электрической мощности, ток, протекающий в схему 10 преобразователя напряжения, равен Pth/Vin. Здесь, напряжение Vin является входным напряжением схемы 10 преобразователя напряжения, которое равно выходному напряжению VB аккумулятора 11. Верхнее предельное значение тока, который протекает в дроссель 5, когда требуется операция понижения, равно Pth/VB. Следовательно, ток Ith магнитного насыщения может быть равен значению тока (Pth/VB). Другими словами, ток магнитного насыщения дросселя 5 может быть меньше максимального значения тока, который протекает в схему 20 инвертора.
[0043] Фиг. 6 показывает блок-схему электрического транспортного средства 91, включающего в себя схему 2a преобразования электрической мощности второго варианта осуществления. Система 2a преобразования электрической мощности включает в себя схему 110 преобразователя напряжения, схему 20 инвертора и контроллер 8 электрической мощности. Схема 110 преобразователя напряжения имеет высоковольтный конец 110a, соединенный с аккумулятором 11, и низковольтный конец 110b, соединенный со схемой 20 инвертора. Система 2a преобразования электрической мощности отличается от системы 2 преобразования электрической мощности первого варианта осуществления в том, что система 2a преобразования электрической мощности включает в себя устройство 106 защиты от перегрузки по току и зарядный порт 107. Другие аспекты конфигурации являются такими же, что и система 2 преобразования электрической мощности первого варианта осуществления. Следовательно, описание конфигурации, отличной от устройства 106 защиты от перегрузки по току и зарядного порта 107, пропускается.
[0044] Между линией 19a положительного электрода и линией 19b отрицательного электрода схемы 110 преобразователя напряжения переключающий элемент 3b и устройство 106 защиты от перегрузки по току соединяются последовательно. Устройство 106 защиты от перегрузки по току является плавким предохранителем, который плавится, когда протекает ток предписанной величины или более. Схема 110 преобразователя напряжения является двунаправленным DC-DC-преобразователем типа схемы 10 преобразователя напряжения первого варианта осуществления. Переключающий элемент 3b задействуется в операции повышения. Переключающий элемент 3b подключается между линией 19a положительного электрода и линией 19b отрицательного электрода. Соответственно, когда переключающий элемент 3b имеет короткое замыкание, линия 19a положительного электрода и линия 19b отрицательного электрода закорачиваются, и большой ток протекает. Однако, когда большой ток протекает, устройство 106 защиты от перегрузки по току немедленно плавится, что выполняет разъединение между линией 19a положительного электрода и линиями 19b отрицательного электрода. Когда линия 19a положительного электрода и линии 19b отрицательного электрода разъединяются, схема 110 преобразователя напряжения не способна выполнять операцию понижения. В таком случае, контроллер 8 электрической мощности удерживает переключающий элемент 3a во включенном состоянии. Когда переключающий элемент 3a удерживается во включенном состоянии, положительный электрод 110a1 высоковольтного конца и положительный электрод 110b1 низковольтного конца соединяются напрямую, и электрическая мощность аккумулятора 11 напрямую протекает в схему 20 инвертора. Следовательно, электрическое транспортное средство 91 может продолжать движение.
[0045] Зарядный порт 107 подключается между положительным электродом 110b1 низковольтного конца и отрицательным электродом 110b2 низковольтного конца схемы 110 преобразователя напряжения. Зарядный порт 107 может быть соединен с внешним источником мощности. Как изложено ранее, поскольку схема 110 преобразователя напряжения является двунаправленным DC-DC-преобразователем, схема 110 преобразователя напряжения может повышать напряжение, вводимое на низковольтный конец 110b, и выводить повышенное напряжение с высоковольтного конца 110a. Следовательно, возможно соединять внешний источник мощности, который имеет более низкое напряжение по сравнению с аккумулятором 11, с зарядным портом 107 и заряжать аккумулятор 11.
[0046] Будет описана модификация второго варианта осуществления. Система преобразования электрической мощности из модификации не включает в себя переключающий элемент 3b. Такая схема 110 преобразователя напряжения может выполнять операцию понижения, хотя она не поддерживает операцию повышения. В таком случае, диод 9a и устройство 106 защиты от перегрузки по току соединяются последовательно между линией 19a положительного электрода и линией 19b отрицательного электрода. Даже когда диод 9a имеет короткое замыкание, и большой ток протекает между линией 19a положительного электрода и линией 19b отрицательного электрода, устройство 106 защиты от перегрузки по току плавится, что выполняет разъединение между линией 19a положительного электрода и линией 19b отрицательного электрода. Также в этом случае, контроллер 8 электрической мощности может удерживать переключающий элемент 3a во включенном состоянии, и электрическое транспортное средство 91 может продолжать движение.
[0047] Со ссылкой на фиг. 7 и 8 будет описана часть аппаратных средств системы 2 (2a) преобразования мощности. Фиг. 7 является общим видом пакетного блока 40, а фиг. 8 является видом в плане пакетного блока 40, подключенного к электрической шине. На фиг. 8 емкостной элемент 50 изображается в дополнение к пакетному блоку 40. Емкостной элемент 50 является эквивалентом сглаживающему конденсатору 12 на фиг. 1.
[0048] Пакетный блок 40 является устройством, включающим в себя объединение переключающих элементов 3a, 3b, включенных в схему 10 преобразователя напряжения, переключающих элементов 4a-4f, включенных в схему 20 инвертора, и дросселя 35. Дроссель 35 является эквивалентом дросселю 5 на фиг. 1.
[0049] Пакетный блок 40 состоит из первого полупроводникового модуля 30a, вторых полупроводниковых модулей 30b, 30c, 30d, множества охладителей 41 и дросселя 35. Первый полупроводниковый модуль 30a вмещает переключающие элементы 3a, 3b схемы 10 преобразователя напряжения и диоды 9, соединенные обратно параллельно переключающим элементам, соответственно. Переключающие элементы 3a, 3b соединяются последовательно в первом полупроводниковом модуле 30a.
[0050] Второй полупроводниковый модуль 30b вмещает переключающие элементы 4a, 4b схемы 20 инвертора и диоды 9, соединенные обратно параллельно переключающим элементам, соответственно. Переключающие элементы 4a, 4b соединяются последовательно внутри второго полупроводникового модуля 30b. Вторые полупроводниковые модули 30c, 30d имеют ту же структуру, что и второй полупроводниковый модуль 30b. Вторые полупроводниковые модули 30c, 30d, каждый, вмещают два переключающих элемента и два диода. Вторые полупроводниковые модули 30b-30d имеют ту же структуру, что и первый полупроводниковый модуль 30a. Далее в данном документе первый полупроводниковый модуль 30a и вторые полупроводниковые модули 30b-30d совокупно называются полупроводниковыми модулями 30. От одной узкой поверхности каждого из полупроводниковых модулей 30 протягиваются клемма 31 положительного электрода, клемма 32 отрицательного электрода и клемма 33 средней точки. Внутри полупроводниковых модулей 30, каждая из клемм 31 положительного электрода соединяется со стороной положительного электрода каждого последовательного соединения двух переключающих элементов, в то время как каждая из клемм 32 отрицательного электрода соединяется со стороной отрицательного электрода каждого из последовательных соединений. Внутри полупроводниковых модулей 30 каждая из клемм 33 средней точки соединяется со средней точкой каждых последовательных соединений двух переключающих элементов.
[0051] Охладители 41 являются линейными трубками, которые переносят хладагент. Охладители 41 размещаются параллельно, с полупроводниковыми модулями 30 или дросселем 35, вставляемыми между соседними охладителями 41.
[0052] Соседние охладители 41 соединяются посредством двух соединительных трубочек 42a, 42b. Каждый из линейных охладителей 41 имеет один продольный конец, который соединяется с соединительной трубочкой 42a, и другой продольный конец, который соединяется с соединительной трубочкой 42b. Охладитель 41a в конце линии охладителей 41 соединяется с подающей трубкой 43 и выпускной трубкой 44. Как видно из направления проведения линии (X-направления на чертеже) охладителей 41, подающая труба 43 размещается, чтобы быть наложенной с соединительной трубочкой 42a, а выпускная трубка 44 размещается, чтобы накладываться с соединительной трубочкой 42b. Подающая трубка 43 и выпускная трубка 44 соединяются с непоказанным устройством циркуляции хладагента. Хладагент подается через подающую трубку 43 из устройства циркуляции хладагента. Хладагент распределяется по всем охладителям 41 через соединительную трубочку 42a. Хладагент поглощает тепло соседних полупроводниковых модулей 30 или дросселей 35, в то же время протекая через внутренность охладителей 41. Хладагент, который поглотил тепло, возвращается к устройству циркуляции хладагента через соединительную трубочку 42b и выпускную трубку 44. Обе стороны полупроводниковых модулей 30 и дросселя 35 находятся в соприкосновении с охладителями 41, так что полупроводниковые модули 30 и дроссель 35 охлаждаются с обеих своих сторон. Пакетный блок 40 совокупно охлаждает переключающие элементы и дроссель 35.
[0053] Фиг. 8 показывает вид в плане пакетного блока 40. Фиг. 8 также изображает электрические шины 51-56, соединенные с каждой клеммой полупроводниковых модулей 30 и емкостного элемента 50. Электрические шины являются токопроводящими элементами, сформированными из металла с небольшим внутренним сопротивлением.
[0054] Будет описана прокладка электрических шин 51-56. Первая электрическая шина 51 имеет один конец, соединенный с клеммой 31 положительного электрода первого полупроводникового модуля 30a. Первая электрическая шина 51 имеет другой конец, служащий в качестве соединительной клеммы 51a, которая соединяется с линией положительного электрода силового кабеля, протягивающегося от аккумулятора 11. Другой конец (соединительная клемма 51a) первой электрической шины 51 соответствует положительному электроду 10a1 высоковольтного конца схемы 10 преобразователя напряжения.
[0055] Вторая электрическая шина 52 имеет один конец, соединенный с клеммой 32 отрицательного электрода первого полупроводникового модуля 30a, и другой конец, соединенный с электродом 50b емкостного элемента 50. Вторая электрическая шина 52 также соединяется с клеммами 32 отрицательного электрода вторых полупроводниковых модулей 30b-30 в некоторой средней точке. Вторая электрическая шина 52 также соединяется с одним концом третьей электрической шины 53 в фрагменте электрода 50b. Третья электрическая шина 53 имеет другой конец, служащий в качестве соединительной клеммы 53a, которая соединяется с линией отрицательного электрода силового кабеля, протягивающегося от аккумулятора 11. Другой конец (соединительная клемма 53a) третьей электрической шины 53 соответствует отрицательному электроду 10a2 высоковольтного конца схемы 10 преобразователя напряжения. Вторая электрическая шина 52 и третья электрическая шина 53 являются эквивалентами линиям отрицательного электрода схемы 10 преобразователя напряжения и схемы 20 инвертора.
[0056] Четвертая электрическая шина 54 подключается между клеммой 33 средней точки первого полупроводникового модуля 30a и первой клеммой 36 дросселя 35. Пятая электрическая шина 55 соединяет вторую клемму 37 дросселя 35, электрод 50a емкостного элемента 50 и клеммы 31 положительного электрода вторых полупроводниковых модулей 30b-30d. Три шестых электрических шины 56 соединяются с клеммами 33 средней точки вторых полупроводниковых модулей 30b-30d, соответственно. Три шестых электрических шины 56 имеют другие концы, служащие в качестве соединительных клемм 56a. Другие концы (соединительные клеммы 56a) трех шестых электрических шин 56 являются эквивалентными выходным концам трехфазного переменного тока схемы 20 инвертора.
[0057] Как ясно показано на фиг. 8, полупроводниковые модули 30 и дроссель 35 (и емкостной элемент 50) соединяются компактным и организованным образом посредством электрических шин 51-56. Дроссель 35 размещается между первым полупроводниковым модулем 30a и вторыми полупроводниковыми модулями 30b-30d. Такая компоновка добивается компактной прокладки электрических шин 51-56, которые соединяют полупроводниковые модули 30 и дроссель 35.
[0058] Будут описаны заслуживающие внимания моменты, относящиеся к технологии, описанной в вариантах осуществления. В вариантах осуществления контроллер 8 электрической мощности регулирует выходное напряжение, чтобы оно было равным входному напряжению, когда электрическая мощность, потребляемая в моторе 13, больше порогового значения Pth электрической мощности. Контроллер 8 электрической мощности может изменять выходное напряжение, наблюдая за током, протекающим в схему 20 инвертора, вместо электрической мощности, потребляемой в моторе 13. Ток (т.е., ток, измеренный посредством датчика 16 тока), протекающий через дроссель 5 схемы 10 преобразователя напряжения, подается к схеме 20 инвертора. Следовательно, ток, протекающий в схему 20 инвертора, может быть измерен датчиком 16 тока схемы 10 преобразователя напряжения. Когда ток, протекающий в схему 20 инвертора, больше предписанного порогового значения тока, контроллер 8 электрической мощности может быть выполнен с возможностью регулировать выходное напряжение, чтобы оно было равно входному напряжению.
[0059] Аккумулятор 11 является эквивалентным одному примеру источника мощности постоянного тока. Источник мощности постоянного тока может быть топливным элементом. Когда источник мощности постоянного тока является топливным элементом, схема преобразователя напряжения может быть понижающим преобразователем напряжения, который может поддерживать только операцию понижения.
[0060] Хотя конкретные примеры настоящего изобретения были описаны подробно выше, они являются просто иллюстративными и не предназначены, чтобы ограничивать формулу изобретения. Технология, описанная в формуле изобретения, включает в себя различные модификации и деформации конкретных примеров, иллюстрированных выше. Технологические компоненты, описанные в этой спецификации или на чертежах, демонстрируют техническую пользу независимо или в различных видах сочетаний и не ограничиваются сочетаниями, описанными в формуле изобретения во время регистрации заявки. Технология, иллюстрированная в этой спецификации или на чертежах, может одновременно добиваться множества целей. Достижение одной из целей само по себе предоставляет ее техническую пользу.
Группа изобретений относится к электрическим тяговым системам транспортных средств. Система преобразования электрической мощности содержит инвертор, преобразователь напряжения и контроллер. Преобразователь напряжения включает в себя высоковольтный конец, соединенный с источником постоянного тока, и низковольтный конец, соединенный с инвертором, переключающие элементы и дроссель. Контроллер управляет переключающими элементами так, что напряжение низковольтного конца становится ниже напряжения высоковольтного в первом состоянии. Причем первое состояние, когда ток, протекающий к инвертору, меньше порогового значения тока, и когда мощность, потребляемая в движущем моторе, меньше порогового значения мощности. Контроллер управляет переключающими элементами так, что напряжение низковольтного конца становится равным напряжению высоковольтного во втором состоянии. Причем второе состояние, когда ток, протекающий к инвертору, больше порогового значения тока, и когда мощность, потребляемая в движущем моторе, больше порогового значения мощности. Также заявлен способ управления системой преобразования электрической мощности. Технический результат заключается в снижении тепла в системе преобразования электрической мощности. 2 н. и 8 з.п. ф-лы, 8 ил.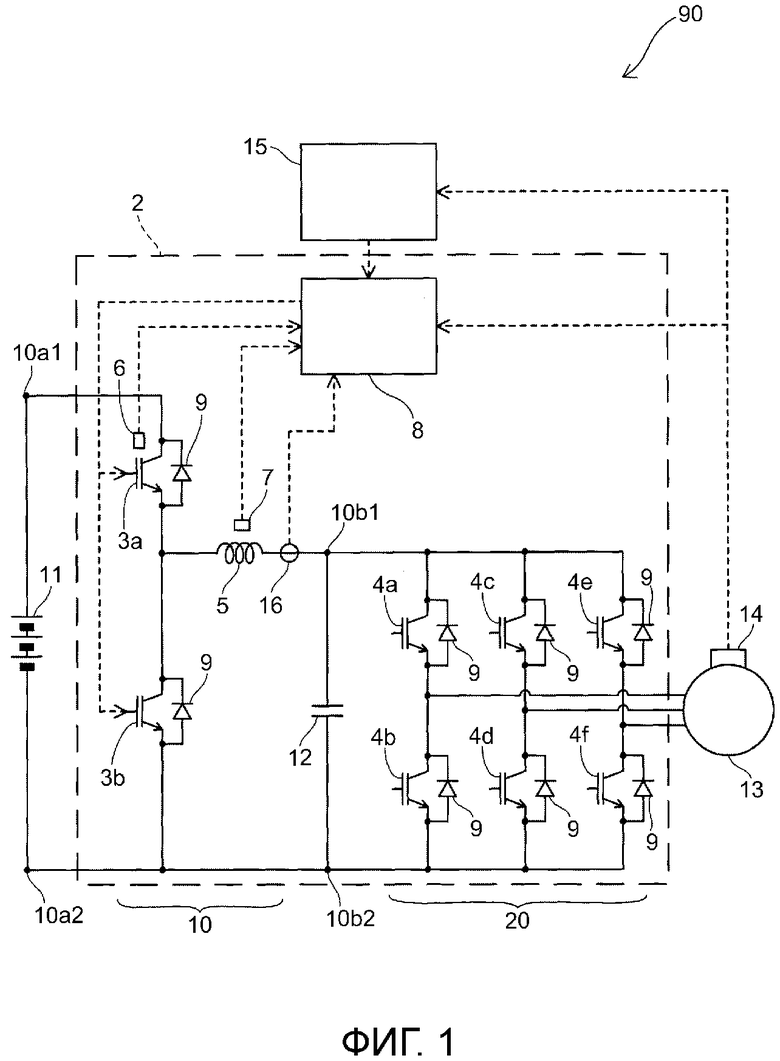
1. Система преобразования электрической мощности, которая преобразует электрическую мощность источника мощности постоянного тока в электрическую мощность приведения в действие движущего мотора,
причем система преобразования электрической мощности содержит:
инвертор, выполненный с возможностью подавать электрическую мощность переменного тока к движущему мотору;
преобразователь напряжения, включающий в себя высоковольтный конец, соединенный с источником мощности постоянного тока, и низковольтный конец, соединенный с инвертором, причем преобразователь напряжения включает в себя переключающие элементы и дроссель и выполнен с возможностью понижать напряжение источника мощности постоянного тока и подавать напряжение источника мощности постоянного тока к инвертору; и
контроллер, выполненный с возможностью управлять преобразователем напряжения,
причем контроллер выполнен с возможностью управлять переключающими элементами так, что напряжение низковольтного конца становится ниже напряжения высоковольтного конца в первом состоянии, причем первое состояние является по меньшей мере одним состоянием из состояния, когда ток, протекающий к инвертору, меньше предписанного порогового значения тока, и состояния, когда электрическая мощность, потребляемая в движущем моторе, меньше предписанного порогового значения электрической мощности,
контроллер выполнен с возможностью управлять переключающими элементами так, что напряжение низковольтного конца становится равным напряжению высоковольтного конца во втором состоянии, причем второе состояние является по меньшей мере одним состоянием из состояния, когда ток, протекающий к инвертору, больше предписанного порогового значения тока, и состояния, когда электрическая мощность, потребляемая в движущем моторе, больше предписанного порогового значения электрической мощности.
2. Система преобразования электрической мощности по п. 1, при этом
контроллер выполнен с возможностью управлять переключающими элементами так, что напряжение низковольтного конца становится ниже напряжения высоковольтного конца в первом состоянии, и
контроллер выполнен с возможностью управлять переключающими элементами так, что напряжение низковольтного конца становится равным напряжению высоковольтного конца в третьем состоянии, причем третье состояние является по меньшей мере одним состоянием из состояния, когда ток, протекающий к инвертору, равен или больше предписанного порогового значения тока, и состояния, когда электрическая мощность, потребляемая в движущем моторе, равна или больше предписанного порогового значения электрической мощности.
3. Система преобразования электрической мощности по п. 1, при этом
контроллер выполнен с возможностью управлять переключающими элементами так, что напряжение низковольтного конца становится ниже напряжения высоковольтного конца в четвертом состоянии, причем четвертое состояние является по меньшей мере одним состоянием из состояния, когда ток, протекающий к инвертору, равен или меньше предписанного порогового значения тока, и состояния, когда электрическая мощность, потребляемая в движущем моторе, равна или меньше предписанного порогового значения электрической мощности, и
контроллер выполнен с возможностью управлять переключающими элементами так, что напряжение низковольтного конца становится равным напряжению высоковольтного конца во втором состоянии.
4. Система преобразования электрической мощности по любому из пп. 1-3, при этом
предписанное пороговое значение тока и предписанное пороговое значение электрической мощности определяются на основе скорости вращения движущего мотора и выходного крутящего момента движущего мотора.
5. Система преобразования электрической мощности по любому из пп. 1-3, при этом
преобразователь напряжения является двунаправленным DC-DC-преобразователем, включающим в себя функцию понижения напряжения для понижения напряжения высоковольтного конца и вывода напряжения высоковольтного конца с низковольтного конца и функцию повышения для повышения напряжения низковольтного конца и вывода напряжения низковольтного конца с высоковольтного конца, и
низковольтный конец преобразователя напряжения соединен с зарядным портом.
6. Система преобразования электрической мощности по любому из пп. 1-3, при этом
контроллер выполнен с возможностью управлять переключающими элементами так, что напряжение низковольтного конца становится равным напряжению высоковольтного конца в пятом состоянии независимо от величины тока, протекающего к инвертору, или электрической мощности, потребляемой в движущем моторе, причем пятое состояние является по меньшей мере одним состоянием из состояния, когда температура переключающих элементов превышает первое предписанное пороговое значение температуры, и состояния, когда температура дросселя превышает второе предписанное пороговое значение температуры.
7. Система преобразования электрической мощности по любому из пп. 1-3, при этом
преобразователь напряжения включает в себя полупроводниковый элемент, подключенный между линией положительного электрода и линией отрицательного электрода, и устройство защиты от перегрузки по току, подключенное последовательно с полупроводниковым элементом.
8. Система преобразования электрической мощности по любому из пп. 1-3, при этом
ток магнитного насыщения дросселя меньше максимального входного тока инвертора.
9. Система преобразования электрической мощности по любому из пп. 1-3, при этом
преобразователь напряжения включает в себя первый полупроводниковый модуль, который вмещает переключающие элементы,
инвертор включает в себя вторые полупроводниковые модули, которые вмещают переключающие элементы для преобразования мощности, и
дроссель предусмотрен между первым полупроводниковым модулем и вторыми полупроводниковыми модулями.
10. Способ управления системой преобразования электрической мощности, которая преобразует электрическую мощность источника мощности постоянного тока в электрическую мощность приведения в действие движущего мотора,
причем система преобразования электрической мощности включает в себя: инвертор, выполненный с возможностью подавать электрическую мощность переменного тока к движущему мотору; преобразователь напряжения, включающий в себя высоковольтный конец, соединенный с источником мощности постоянного тока, и низковольтный конец, соединенный с инвертором, причем преобразователь напряжения включает в себя переключающие элементы и дроссель и выполнен с возможностью понижать напряжение источника мощности постоянного тока и подавать напряжение источника мощности постоянного тока к инвертору; и контроллер, выполненный с возможностью управлять преобразователем напряжения,
причем способ управления содержит этапы, на которых:
управляют, посредством контроллера, переключающими элементами так, что напряжение низковольтного конца становится ниже напряжения высоковольтного конца в первом состоянии, причем первое состояние является по меньшей мере одним состоянием из состояния, когда ток, протекающий к инвертору, меньше предписанного порогового значения тока, и состояния, когда электрическая мощность, потребляемая в движущем моторе, меньше предписанного порогового значения электрической мощности; и
управляют, посредством контроллера, переключающими элементами так, что напряжение низковольтного конца становится равным напряжению высоковольтного конца во втором состоянии, причем второе состояние является по меньшей мере одним состоянием из состояния, когда ток, протекающий к инвертору, больше предписанного порогового значения тока, и состояния, когда электрическая мощность, потребляемая в движущем моторе, больше предписанного порогового значения электрической мощности.
| JP 2015216781 A, 03.12.2015 | |||
| JP 3582523 B2, 27.10.2004 | |||
| US 2014292076 A1, 02.10.2014 | |||
| WO 2016117438 A1, 28.07.2016 | |||
| ТРАНСПОРТНОЕ СРЕДСТВО | 2008 |
|
RU2427478C2 |

