Уровень техники
1. Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к контроллеру транспортного средства с электрическим приводом.
2. Описание предшествующего уровня техники
[0002] В качестве такого типа контроллера транспортного средства с электрическим приводом прежде предлагался контроллер, который, когда рабочая точка мотора попадает в резонансную область, в которой резонанс возникает в схеме усилителя, выполняет управление переключением по переключающим элементам инвертора посредством способа управления с прямоугольным сигналом на основе новой последовательности импульсов, имеющей три импульса на цикл (например, см. публикацию японской патентной заявки № 2017-131094 (JP 2017-131094 A)). Управление переключением на основе этой новой последовательности импульсов подавляет LC-резонанс в схеме усилителя при частоте электрического тока 6-го порядка для приводящего в действие мотор электричества посредством повышения частоты электрического тока 6-го порядка.
Сущность изобретения
[0003] Вышеописанный контроллер транспортного средства с электрическим приводом может подавлять LC-резонанс вследствие частоты электрического тока 6-го порядка для приводящего в действие мотор электричества посредством повышения частоты электрического тока 6-го порядка. Однако, когда частота электрического тока 6-го порядка повышается, составляющая частоты более высокого порядка, такая как частота электрического тока 12-го порядка, увеличивается, так что LC-резонанс может возникать при такой частоте высокого порядка.
[0004] Изобретение предоставляет контроллер транспортного средства с электрическим приводом, который подавляет не только резонанс вследствие частотной составляющей низкого порядка для приводящего в действие мотор электричества, но также резонанс вследствие его частотной составляющей высокого порядка.
[0005] Контроллер транспортного средства с электрическим приводом настоящего изобретения применяет следующие решения, чтобы решать вышеописанную главную задачу.
[0006] Контроллер транспортного средства с электрическим приводом настоящего изобретения устанавливается в транспортном средстве с электрическим приводом, включающем в себя мотор для движения, инвертор, который приводит в действие мотор, и устройство аккумулирования электричества, которое обменивается электричеством с мотором через инвертор. Контроллер включает в себя электронный блок управления, который выполняет управление переключением по переключающему элементу инвертора посредством переключения между управлением с широтно-импульсной модуляцией и управлением с прямоугольным сигналом согласно коэффициенту модуляции. Электронный блок управления выполняет управление переключением посредством управления с прямоугольным сигналом в первом режиме переключения, когда скорость вращения мотора равна или выше первой предварительно определенной скорости вращения. Электронный блок управления выполняет управление переключением посредством управления с прямоугольным сигналом во втором режиме переключения, когда скорость вращения мотора ниже первой предварительно определенной скорости вращения. Первая предварительно определенная скорость вращения является скоростью вращения ниже первой резонансной области. Первый режим переключения является режимом последовательности переключения, который подавляет LC-резонанс в первой резонансной области. Второй режим переключения является режимом последовательности переключения, который подавляет LC-резонанс во второй резонансной области ниже первой предварительно определенной скорости вращения.
[0007] Электронный блок управления выполняет управление переключением по переключающему элементу инвертора, который приводит в действие мотор, посредством переключения между управлением с широтно-импульсной модуляцией и управлением с прямоугольным сигналом согласно коэффициенту модуляции. Электронный блок управления выполняет управление переключением посредством управления с прямоугольным сигналом следующим образом: Когда скорость вращения мотора равна или выше первой предварительно определенной скорости вращения ниже первой резонансной области, электронный блок управления выполняет управление переключением с помощью первого режима переключения последовательности переключения, который подавляет LC-резонанс в первой резонансной области. С другой стороны, когда скорость вращения мотора ниже первой предварительно определенной скорости вращения, электронный блок управления выполняет управление переключением с помощью второго режима переключения последовательности переключения, который подавляет LC-резонанс во второй резонансной области ниже первой предварительно определенной скорости вращения. В частности, когда скорость вращения находится в первой резонансной области, в которой частота низкого порядка (например, частота электрического тока 6-го порядка) для приводящего в действие мотор электричества вызывает LC-резонанс в электрической системе транспортного средства, электронный блок управления выполняет управление переключением с помощью первого режима переключения последовательности переключения, который подавляет этот LC-резонанс. Таким образом, LC-резонанс вследствие частоты низкого порядка может быть подавлен. С другой стороны, когда скорость вращения находится во второй резонансной области, в которой частота высокого порядка (например, частота электрического тока 12-го порядка или частота электрического тока 24-го порядка) для приводящего в действие мотор электричества вызывает LC-резонанс в электрической системе транспортного средства, электронный блок управления выполняет управление переключением с помощью второго режима переключения последовательности переключения, который подавляет этот LC-резонанс. Таким образом, LC-резонанс вследствие частоты высокого порядка может быть подавлен. В результате, возможно подавлять не только LC-резонанс вследствие частотной составляющей низкого порядка для приводящего в действие мотор электричества, но также LC-резонанс вследствие его частотной составляющей высокого порядка.
[0008] В контроллере транспортного средства с электрическим приводом настоящего изобретения первый режим переключения может быть режимом последовательности переключения, имеющим три или более импульсов для каждого цикла, при этом первый полуцикл и последний полуцикл каждого цикла имеют один или более импульсов, и первый полуцикл и последний полуцикл каждого цикла имеют одинаковое число периодов, в течение которых полярность напряжения временно переворачивается, а второй режим переключения может быть режимом последовательности переключения, имеющим большее число импульсов, чем первый режим переключения. В этом случае, предполагается, что второй режим переключения является режимом, в котором, как и в первом режиме переключения, первый полуцикл и последний полуцикл каждого цикла имеет один или более импульсов и одинаковое число периодов, в течение которых полярность напряжения временно переворачивается.
[0009] В контроллере транспортного средства с электрическим приводом настоящего изобретения второй режим переключения может быть режимом последовательности переключения, в которой число импульсов и электрический угол переключения задаются так, чтобы устранять составляющую высокой частоты предварительно определенного порядка согласно рабочему состоянию мотора. Второй режим переключения может быть режимом последовательности переключения, который имеет полуволновую симметрию и нечетную симметрию. Например, последовательность переключения, которая повышает частоту низкого порядка (например, частоту электрического тока 6-го порядка) для мотора, может быть использована в первом режиме переключения, а последовательность переключения, которая дополнительно повышает частоту низкого порядка (например, частоту электрического тока 6-го порядка) и частоту высокого порядка (например, частоту электрического тока 12-го порядка или частоту электрического тока 24-го порядка) для мотора, может быть использована во втором режиме переключения.
[0010] Когда скорость вращения мотора равна или выше второй предварительно определенной скорости вращения, которая равна или выше верхней предельной скорости вращения первой резонансной области, электронный блок управления может выполнять управление переключением в режиме прямоугольного сигнала последовательности переключения, имеющей один импульс на цикл. Таким образом, число раз переключения уменьшается, когда скорость вращения мотора равна или выше второй предварительно определенной скорости вращения, так что потери на переключение могут быть уменьшены, и энергоэффективность может быть повышена.
[0011] Электронный блок управления может выполнять управление переключением посредством управления с прямоугольным сигналом в первом режиме переключения, когда скорость вращения мотора находится в первой резонансной области. Электронный блок управления может выполнять управление переключением во втором режиме переключения, когда скорость вращения мотора находится во второй резонансной области. Электронный блок управления может выполнять управление переключением в режиме прямоугольного сигнала, когда скорость вращения мотора находится за пределами и первой резонансной области, и второй резонансной области. Режим прямоугольного сигнала может быть режимом последовательности переключения, имеющим один импульс на цикл. Таким образом, число раз переключений уменьшается, когда скорость вращения мотора находится за пределами и первой резонансной области, и второй резонансной области, так что потери на переключение могут быть уменьшены, и энергоэффективность может быть увеличена.
Краткое описание чертежей
[0012] Признаки, преимущества и техническое и промышленное значение примерных вариантов осуществления изобретения будут описаны ниже со ссылкой на сопровождающие чертежи, на которых аналогичные номера обозначают аналогичные элементы, и на которых:
Фиг. 1 является схемой конфигурации, показывающей общий вид конфигурации электрического транспортного средства 20, оборудованного контроллером для транспортного средства с электрическим приводом в качестве варианта осуществления настоящего изобретения;
Фиг. 2 является блок-схемой последовательности операций, показывающей пример процедуры управления с прямоугольным сигналом, выполняемой электронным блоком 50 управления;
Фиг. 3 является видом, схематично иллюстрирующим пример последовательностей импульсов в режиме прямоугольного сигнала, первом режиме переключения и втором режиме переключения;
Фиг. 4 является видом, схематично иллюстрирующим отношение между скоростью Nm вращения мотора 32, режимами управления и резонансными областями;
Фиг. 5 является блок-схемой последовательности операций, показывающей пример процедуры управления с прямоугольным сигналом модифицированного примера;
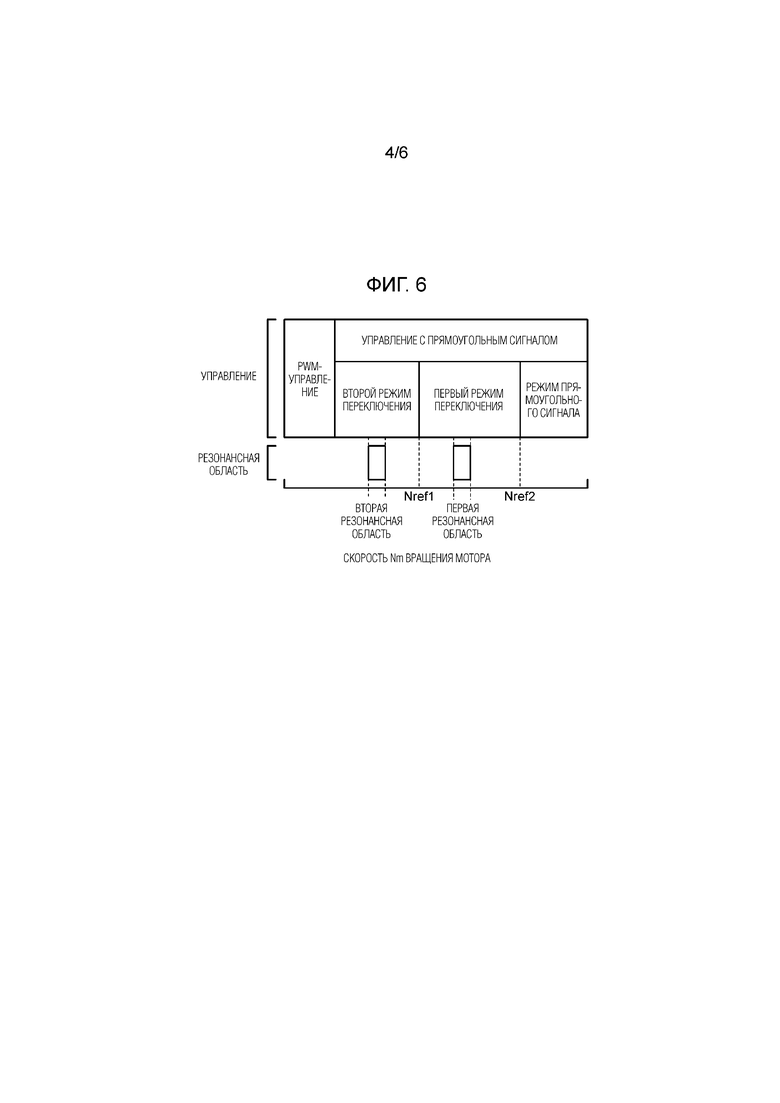
Фиг. 6 является видом, схематично иллюстрирующим отношение между скоростью Nm вращения мотора 32, режимами управления и резонансными областями в модифицированном примере;
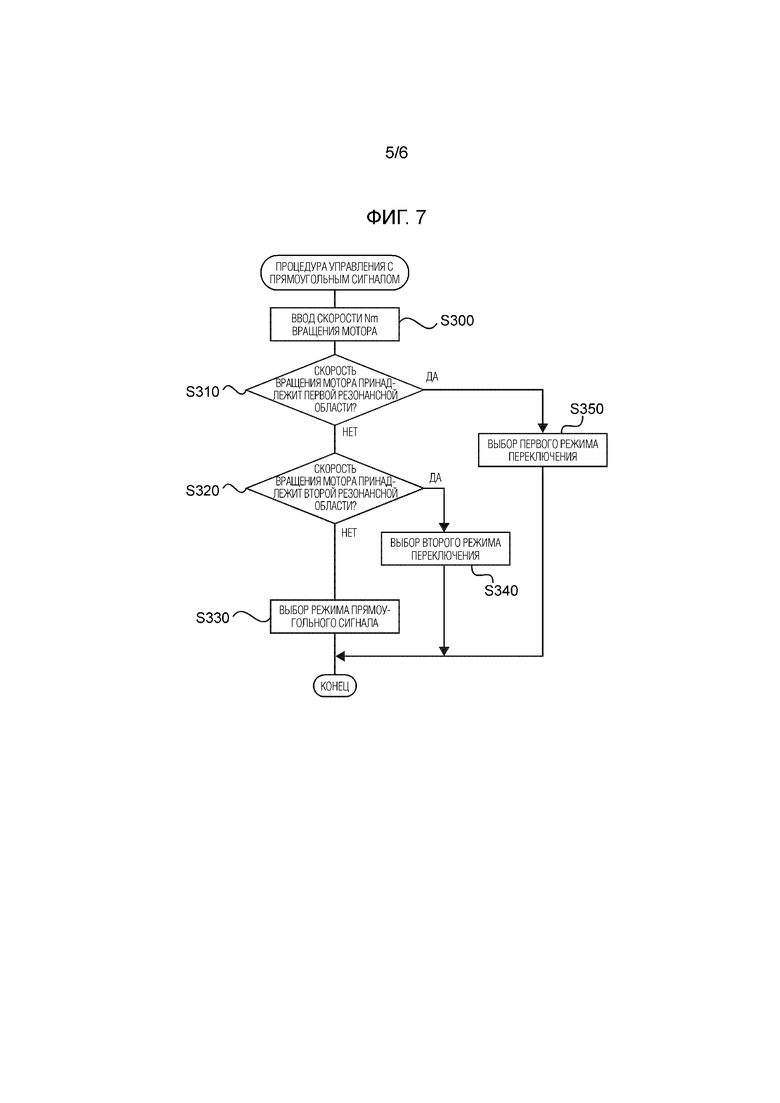
Фиг. 7 является блок-схемой последовательности операций, показывающей пример процедуры управления с прямоугольным сигналом модифицированного примера; и
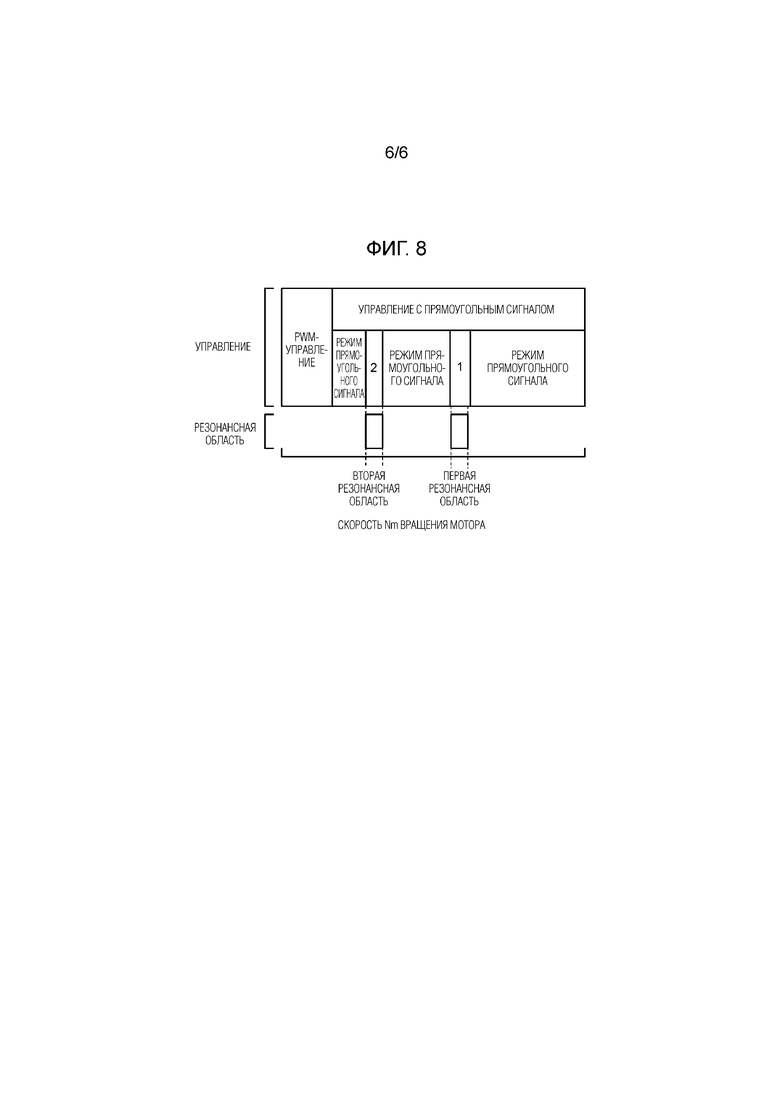
Фиг. 8 является видом, схематично иллюстрирующим отношение между скоростью Nm вращения мотора 32, режимами управления и резонансными областями в модифицированном примере.
Подробное описание вариантов осуществления
[0013] Далее, режим выполнения данного изобретения будет описан с помощью варианта осуществления.
[0014] Фиг. 1 является схемой конфигурации, показывающей общий вид конфигурации электрического транспортного средства 20, оборудованного контроллером для транспортного средства с электрическим приводом в качестве варианта осуществления настоящего изобретения. Электрическое транспортное средство 20 этого варианта осуществления включает в себя, как показано на фиг. 1, мотор 32, инвертор 34, аккумулятор 36 в качестве источника мощности, повышающий преобразователь 40 и электронный блок 50 управления.
[0015] Мотор 32 конфигурируется как синхронный мотор-генератор и включает в себя ротор, в который встроены постоянные магниты, и статор, на который намотаны трехфазные катушки. Ротор мотора 32 соединяется с приводным валом 26, который соединяется с ведущими колесами 22a, 22b через дифференциальную передачу 24.
[0016] Инвертор 34 используется для приведения в действие мотора 32. Инвертор 34 соединяется с повышающим преобразователем 40 через силовые линии 42 высоковольтной стороны и имеет шесть транзисторов T11-T16 в качестве переключающих элементов и шесть диодов D11-D16, соответственно соединенных параллельно с шестью транзисторами T11-T16. Транзисторы T11-T16 размещаются парами, при этом каждый транзистор соединен на стороне истока и стороне стока, соответственно, с линией стороны положительного электрода и линией стороны отрицательного электрода силовых линий 42 высоковольтной стороны. Трехфазные катушки (катушка U-фазы, катушка V-фазы и катушка W-фазы) мотора 32 соответственно соединяются с точками соединения пар транзисторов T11-T16. Таким образом, поскольку отношение времени "включения" пары транзисторов T11-T16 регулируется посредством электронного блока 50 управления, в то время как напряжение подается к инвертору 34, вращающееся магнитное поле формируется в трехфазных катушках, и мотор 32 приводится во вращение. Сглаживающий конденсатор 46 устанавливается между линией стороны положительного электрода и линией стороны отрицательного электрода силовых линий высоковольтной стороны.
[0017] Аккумулятор 36 конфигурируется, например, как литиево-ионная аккумуляторная батарея или никелево-металлгидридная аккумуляторная батарея и соединяется с повышающим преобразователем 40 через силовые линии 44 низковольтной стороны. Сглаживающий конденсатор 48 устанавливается между линией стороны положительного электрода и линией стороны отрицательного электрода силовых линий 44 низковольтной стороны.
[0018] Повышающий преобразователь 40 соединяется с силовыми линиями 42 высоковольтной стороны и силовыми линиями 44 низковольтной стороны и имеет два транзистора T31, T32, два диода D31, D32, соответственно соединенные параллельно двум транзисторам T31, T32 и дросселю L. Транзистор T31 соединяется с линией стороны положительного электрода силовых линий 42 высоковольтной стороны. Транзистор T32 соединяется с транзистором T31 и с линиями стороны отрицательного электрода силовых линий 42 высоковольтной стороны и силовых линий 44 низковольтной стороны. Дроссель L соединяется с точкой соединения между транзисторами T31, T32 и с линией стороны положительного электрода силовых линий 44 низковольтной стороны. Поскольку отношение времени "включения" транзисторов T31, T32 регулируется посредством электронного блока 50 управления, повышающий преобразователь 40 поднимает напряжение электричества в силовых линиях 44 низковольтной стороны и подает это электричество в силовые линии 42 высоковольтной стороны, или понижает напряжение электричества в силовых линиях 42 высоковольтной стороны и подает это электричество в силовые линии 44 низковольтной стороны.
[0019] Электронный блок 50 управления конфигурируется как микропроцессор, сконцентрированный вокруг CPU 52, и включает в себя, в дополнение к CPU 52, ROM 54, которое хранит программы обработки, RAM 56, которое временно хранит данные, и порты ввода и вывода. Сигналы от различных датчиков вводятся в электронный блок 50 управления через порт ввода. Примеры сигналов, вводимых в электронный блок 50 управления, включает в себя положение θm при вращении от датчика обнаружения положения при вращении (например, датчика положения) 32a, который обнаруживает положение при вращении ротора мотора 32, и фазные токи Iu, Iv от датчиков 32u, 32v тока, которые обнаруживают фазные токи в соответствующих фазах мотора 32. Другими примерами являются напряжение Vb от датчика 36a напряжения, установленного между клеммами аккумулятора 36, и ток Ib от датчика 36b тока, установленного на выходной клемме аккумулятора 36. Дополнительными примерами являются ток IL от датчика 40a тока, установленного последовательно с дросселем L, напряжение VH в конденсаторе 46 (силовых линиях 42 высоковольтной стороны) от датчика 46a напряжения, установленного между клеммами конденсатора 46, и напряжение VL в конденсаторе 48 (силовых линиях 44 низковольтной стороны) от датчика 48a напряжения, установленного между клеммами конденсатора 48. Дополнительными примерами являются сигнал зажигания от переключателя 60 зажигания и положение SP передачи от датчика 62 положения передачи, который обнаруживает рабочее положение рычага 61 переключения передач. Еще одними примерами являются величина Acc срабатывания акселератора от датчика 64 положения педали акселератора, который обнаруживает величину нажатия педали 63 акселератора, положение BP педали тормоза от датчика 66 положения педали тормоза, который обнаруживает величину нажатия педали 65 тормоза, и скорость V транспортного средства от датчика 68 скорости транспортного средства. Электронный блок 50 управления вычисляет скорость Nm вращения мотора 32 на основе положения θm при вращении от датчика 32a обнаружения положения при вращении и вычисляет коэффициент SOC аккумулирования электричества для аккумулятора 36 на основе интегрального значения тока Ib аккумулятора 36 от датчика 36b тока. Здесь, коэффициент SOC аккумулирования электричества является отношением величины электричества, аккумулированного (величины электричества, которое может быть разряжено из) в аккумуляторе 36, к суммарной емкости аккумулятора 36.
[0020] Различные управляющие сигналы выводятся из электронного блока 50 управления через порт вывода. Примеры сигналов, выводимых из электронного блока 50 управления, включают в себя сигналы управления переключением для транзисторов T11-T16 инвертора 36 и сигналы управления переключением для транзисторов T31, T32 повышающего преобразователя 40.
[0021] В электрическом транспортном средстве 20 варианта осуществления, сконфигурированном таким образом, электронный блок 50 управления выполняет следующее управление движением. В управлении движением электронный блок 50 управления устанавливает требуемый крутящий момент Td*, требуемый приводным валом 26, на основе величины Acc срабатывания акселератора и скорости V транспортного средства, устанавливает заданный требуемый крутящий момент Td* в качестве команды Tm* крутящего момента для мотора 32 и выполняет управление переключением по транзисторам T11-T16 инвертора 36 так, что мотор 32 приводится в действие согласно команде Tm* крутящего момента. Кроме того, в управлении движением, электронный блок 50 управления устанавливает целевое напряжение VH* для силовых линий 42 высоковольтной стороны так, что мотор 32 может приводиться в действие согласно команде Tm* крутящего момента, и выполняет управление переключением по транзисторам T31, T32 повышающего преобразователя 40, так что напряжение VH в силовых линиях 42 высоковольтной стороны соответствует целевому напряжению VH*.
[0022] При выполнении управления движением электронный блок 50 управления управляет инвертором 34 в одном режиме управления из режима управления с синусоидальной широтно-импульсной модуляцией (PWM), режима управления с перемодуляцией PWM и режима управления с прямоугольным сигналом. Режим управления с синусоидальной PWM является режимом управления, в котором инвертор 34 управляется так, что напряжение псевдотрехфазного переменного тока прикладывается (подается) к мотору 32. Режим управления с перемодуляцией PWM является режимом управления, в котором инвертор 34 управляется так, что напряжение перемодуляции прикладывается к мотору 32. Режим управления с прямоугольным сигналом является режимом управления, в котором инвертор 34 управляется так, что напряжение прямоугольного сигнала прикладывается к мотору 32. Режим управления выбирается согласно коэффициенту модуляции; в порядке увеличения коэффициента модуляции выбираются режим управления с синусоидальной широтно-импульсной модуляцией (PWM), режим управления с перемодуляцией PWM и режим управления с прямоугольным сигналом. В этом варианте осуществления режим управления с синусоидальной широтно-импульсной модуляцией (PWM) и режим управления с перемодуляцией PWM совокупно называются режимом PWM-управления, поскольку PWM-управление выполняется в обоих режимах управления, и электронный блок 50 управления, в основном, выполняет управление, переключаясь между режимом PWM-управления и режимом управления с прямоугольным сигналом. В этом варианте осуществления, чтобы уменьшать потерю на переключение для транзисторов T11-T16 инвертора 34 и увеличивать энергоэффективность, инвертор 34 управляется в режиме управления с прямоугольным сигналом по возможности. В частности, при установке целевого напряжения VH* для силовых линий 42 высоковольтной стороны, так что мотор 32 может приводиться в действие согласно команде Tm* крутящего момента, электронный блок 50 управления устанавливает целевое напряжение VH*, так что коэффициент модуляции соответствует режиму управления с прямоугольным сигналом по возможности без влияния на комфорт во время движения и т.д.
[0023] Далее будет описана работа электрического транспортного средства 20 варианта осуществления, в частности, управление для подавления резонанса на основе частоты fm колебания нагрузки мотора 32, выполняемая посредством электронного блока 50 управления. Частота fm колебания нагрузки мотора 32 зависит от мотора. Резонанс возникает, когда частота колебания электрического тока 6-го порядка или частота колебания электрического тока 12-го порядка принадлежат резонансной области LC-контура, сформированного посредством дросселя L повышающего преобразователя 40 и конденсаторов 46 в силовых линиях 42 высоковольтной стороны. Частота колебания электрического тока 6-го порядка и частота колебания электрического тока 12-го порядка изменяются линейно относительно скорости Nm вращения мотора 32. В этом варианте осуществления область, полученная посредством преобразования области, в которой LC-резонанс возникает вследствие частоты колебания электрического тока 6-го порядка, в скорость вращения мотора 32, называется первой резонансной областью, а область, полученная посредством преобразования области, в которой LC-резонанс возникает вследствие частоты колебания электрического тока 12-го порядка, в скорость вращения мотора 32, называется второй резонансной областью.
[0024] Фиг. 2 является блок-схемой последовательности операций, показывающей пример процедуры управления с прямоугольным сигналом, выполняемой электронным блоком 50 управления. Эта процедура выполняется циклически. Когда процедура управления с прямоугольным сигналом запускается, электронный блок 50 управления сначала выполняет процесс ввода скорости Nm вращения мотора 32 (этап S100). В качестве скорости Nm вращения мотора 32 может быть введена скорость вращения, вычисленная на основе положения θm при вращении от датчика 32a обнаружения положения при вращении. Затем, электронный блок 50 управления определяет, действительно ли скорость Nm вращения мотора 32 равна или выше порогового значения Nref (этап S110). Здесь, пороговое значение Nref предварительно определяется в качестве скорости вращения, которая ниже первой резонансной области и выше второй резонансной области. Когда скорость Nm вращения мотора 32 равна или выше порогового значения Nref, электронный блок 50 управления выбирает управление переключением в первом режиме переключения, имеющем последовательность переключения (последовательность импульсов), которая повышает частоту для частотной составляющей колебания электрического тока 6-го порядка (этап S130), и заканчивает текущую процедуру. С другой стороны, когда скорость Nm вращения мотора 32 ниже порогового значения Nref, электронный блок 50 управления выбирает управление переключением во втором режиме переключения, имеющем последовательность переключения (последовательность импульсов), которая повышает частоту для частотной составляющей колебания электрического тока 12-го порядка в дополнение к частоте для частотной составляющей колебания электрического тока 6-го порядка (этап S120), и заканчивает текущую процедуру.
[0025] Фиг. 3 схематично показывает пример последовательностей импульсов в режиме с прямоугольным сигналом, первом режиме переключения и втором режиме переключения. Режим с прямоугольным сигналом является режимом, имеющим один импульс на цикл. Первый режим переключения имеет последовательность переключения, в которой первый полуцикл и последний полуцикл каждого цикла имеют один или более импульсов и одинаковое число периодов, в течение которых полярность напряжения временно переворачивается, и который уменьшает частотную составляющую колебания электрического тока 6-го порядка посредством повышения его частоты. Таким образом, первый режим переключения имеет три или более импульсов на цикл, что является большим числом импульсов, чем в режиме с прямоугольным сигналом. Подробности первого режима переключения описываются в JP 2017-131094 A. Последовательность переключения, используемая в первом режиме переключения, который уменьшает частотную составляющую колебания электрического тока 6-го порядка посредством повышения его частоты, может быть получена посредством экспериментов и создана в форме таблицы или может быть вычислена посредством машинного вычисления. Последовательность, показанная на фиг. 3, имеет минимальное число импульсов, т.е., три импульса, чтобы уменьшать потерю на переключение транзисторов T11-T16. Второй режим переключения имеет последовательность переключения, в которой число и амплитуда импульсов и электрический угол переключения устанавливаются так, чтобы устранять составляющую высокой частоты предварительно определенного порядка согласно рабочей точке мотора 32. В этом варианте осуществления используется последовательность переключения, которая не только уменьшает частотную составляющую колебания электрического тока 6-го порядка посредством повышения его частоты, но также уменьшает частотную составляющую колебания электрического тока 12-го порядка посредством повышения его частоты. Таким образом, второй режим переключения имеет пять или более импульсов на цикл, что является большим числом импульсов, чем в последовательности переключения первого режима переключения. Подробности второго режима переключения описываются в публикации японской патентной заявки № 2013-162660. Последовательность переключения, используемая во втором режиме переключения, которая не только уменьшает частотную составляющую колебания электрического тока 6-го порядка посредством повышения его частоты, но также уменьшает частотную составляющую колебания электрического тока 12-го порядка посредством повышения его частоты, может также быть получена посредством экспериментов и создана в форме таблицы или может быть вычислена посредством машинного вычисления. Последовательность, показанная в этом варианте осуществления, имеет минимальное число импульсов, т.е., пять импульсов, чтобы уменьшать потерю на переключение транзисторов T11-T16. Как показано на фиг. 3, последовательности переключения первого режима переключения и второго режима переключения создаются так, чтобы иметь полуволновую симметрию, выраженную как f(ωt)=-f(ωt+π), а также нечетную симметрию, выраженную как f(ωt)=f(π-ωt), где ω является угловой скоростью ротора мотора 32, а t является временем. Возможно устранять гармонические составляющие четных порядков и упрощать управление с помощью ограничивающего условия полуволновой симметрии и устранять косинусоидные составляющие гармоник с помощью ограничивающего условия нечетной симметрии.
[0026] Фиг. 4 схематично показывает отношение между скоростью Nm вращения мотора 32, режимами управления и резонансными областями. Фиг. 4 показывает, что режим PWM-управления и режим управления с прямоугольным сигналом переключаются согласно скорости Nm вращения мотора 32. Как описано выше, режим PWM-управления и режим управления с прямоугольным сигналом переключаются согласно коэффициенту модуляции, который определяется на основе напряжения VH в силовых линиях 42 высоковольтной стороны, скорости Nm вращения мотора 32 и крутящего момента Tm, выводимого из мотора 32. Следовательно, может быть понятно, что фиг. 4 основывается на предположении, что напряжение VH в силовых линиях 42 высоковольтной стороны является постоянным, и крутящий момент Tm, выводимый от мотора 32, также является постоянным. В этом варианте осуществления, как показано на фиг. 4, когда, в режиме управления с прямоугольным сигналом, скорость Nm вращения мотора 32 находится в диапазоне, включающем в себя первую резонансную область, и равна или выше порогового значения Nref, электронный блок 50 управления выполняет управление переключением в первом режиме переключения, который уменьшает резонанс в первой резонансной области (резонанс вследствие частоты колебания электрического тока 6-го порядка). Таким образом, резонанс в первой резонансной области может быть подавлен. С другой стороны, когда, в режиме управления с прямоугольным сигналом, скорость Nm вращения мотора 32 находится в диапазоне, включающем в себя вторую резонансную область, и ниже порогового значения Nref, электронный блок 50 управления выполняет управление переключением во втором режиме переключения, который уменьшает резонанс во второй резонансной области (резонанс вследствие частоты колебания электрического тока 6-го порядка и частоты колебания электрического тока 12-го порядка). Таким образом, резонанс во второй резонансной области может быть подавлен.
[0027] Как было описано выше, в контроллере, установленном в электрическом транспортном средстве 20 варианта осуществления, электронный блок 50 управления выполняет управление переключением в режиме управления с прямоугольным сигналом следующим образом: Когда скорость Nm вращения мотора 32 находится в диапазоне, включающем в себя первую резонансную область и равна или выше порогового значения Nref, электронный блок 50 управления выполняет управление переключением в первом режиме переключения, который уменьшает резонанс в первой резонансной области (резонанс вследствие частоты колебания электрического тока 6-го порядка). Таким образом, резонанс в первой резонансной области может быть подавлен. С другой стороны, когда, скорость Nm вращения мотора 32 находится в диапазоне, включающем в себя вторую резонансную область, и ниже порогового значения Nref, электронный блок 50 управления выполняет управление переключением во втором режиме переключения, который уменьшает резонанс во второй резонансной области (резонанс вследствие частоты колебания электрического тока 6-го порядка и частоты колебания электрического тока 12-го порядка). Таким образом, резонанс во второй резонансной области может быть подавлен. В результате, возможно подавлять не только резонанс вследствие частотной составляющей низкого порядка для электричества, которое приводит в действие мотор 32, но также резонанс вследствие его частотной составляющей высокого порядка.
[0028] В контроллере, установленном в электрическом транспортном средстве 20 варианта осуществления, электронный блок 50 управления выполняет управление переключением в режиме управления с прямоугольным сигналом таким образом, что, когда скорость Nm вращения мотора 32 находится в диапазоне, включающем в себя первую резонансную область, и равна или выше порогового значения Nref, электронный блок 50 управления выполняет управление переключением в первом режиме переключения, и что, когда скорость Nm вращения мотора 32 находится в диапазоне, включающем в себя вторую резонансную область, и ниже порогового значения Nref, электронный блок 50 управления выполняет управление переключением во втором режиме переключения. Альтернативно, электронный блок 50 управления может выполнять управление переключением в режиме с прямоугольным сигналом (одноимпульсная последовательность), когда скорость Nm вращения мотора 32 выше первой резонансной области. В этом случае, электронный блок 50 управления может выполнять процедуру управления с прямоугольным сигналом, иллюстрированную на фиг. 5. В процедуре управления с прямоугольным сигналом на фиг. 5 электронный блок 50 управления вводит скорость Nm вращения мотора 32 (этап S200) и определяет, находится ли скорость Nm вращения в диапазоне, включающем в себя вторую резонансную область и ниже порогового значения Nref1, или область, включающую в себя первую резонансную область и равную или выше порогового значения Nref1, но ниже порогового значения Nref2, или область, равную или выше порогового значения Nref2, которая выше первой резонансной области (этап S210). Когда определяется, что скорость Nm вращения мотора 32 находится в области, включающей в себя вторую резонансную область и ниже порогового значения Nref1, электронный блок 50 управления выполняет управление переключением во втором режиме переключения (этап S220) и заканчивает текущую процедуру. Когда определяется, что скорость Nm вращения мотора 32 находится в области, включающей в себя первую резонансную область и равной или выше порогового значения Nref1, но ниже порогового значения Nref2, электронный блок 50 управления выполняет управление переключением в первом режиме переключения (этап S230) и заканчивает текущую процедуру. Когда определяется, что скорость Nm вращения мотора 32 находится в диапазоне, равном или выше порогового значения Nref2, которая выше первой резонансной области, электронный блок 50 управления выполняет управление переключением в режиме с прямоугольным сигналом (этап S240) и заканчивает текущую процедуру. Фиг. 6 схематично показывает отношение между скоростью Nm вращения мотора 32, режимами управления и резонансными областями в этом модифицированном примере. По сравнению с выполнением управления переключением в первом режиме переключения, когда скорость Nm вращения мотора 32 находится в области, равной или выше порогового значения Nref2, которая выше первой резонансной области, выполнение управления переключением в режиме с прямоугольным сигналом в этой области, как в этом модифицированном примере, может уменьшать потерю на переключение и увеличивать энергоэффективность.
[0029] Альтернативно, электронный блок 50 управления может выполнять управление переключением в режиме с прямоугольным сигналом таким образом, что, когда скорость Nm вращения мотора 32 принадлежит первой резонансной области, электронный блок 50 управления выполняет управление переключением в первом режиме переключения, и что, когда скорость Nm вращения мотора 32 принадлежит второй резонансной области, электронный блок 50 управления выполняет управление переключением во втором режиме переключения, и что, когда скорость Nm вращения мотора 32 не принадлежит ни первой резонансной области, ни второй резонансной области, электронный блок 50 управления выполняет управление переключением в режиме прямоугольного сигнала. В этом случае, электронный блок 50 управления может выполнять процедуру управления с прямоугольным сигналом на фиг. 7. В процедуре управления с прямоугольным сигналом на фиг. 7 электронный блок 50 управления вводит скорость Nm вращения мотора 32 (этап S300) и определяет, принадлежит ли скорость Nm вращения первой резонансной области (этап S310) или принадлежит второй резонансной области (этап S320). Когда определяется, что скорость Nm вращения мотора 32 не принадлежит ни первой резонансной области, ни второй резонансной области, электронный блок 50 управления выполняет управление переключением в режиме с прямоугольным сигналом (этап S330) и заканчивает текущую процедуру. Когда определяется, что скорость Nm вращения мотора 32 принадлежит второй резонансной области, электронный блок 50 управления выполняет управление переключением во втором режиме переключения (этап S340) и заканчивает текущую процедуру. Когда определяется, что скорость Nm вращения мотора 32 принадлежит первой резонансной области, электронный блок 50 управления выполняет управление переключением в первом режиме переключения (этап S350) и заканчивает текущую процедуру. Фиг. 8 схематично показывает отношение между скоростью Nm вращения мотора 32, режимами управления и резонансными областями в этом модифицированном примере. По сравнению с выполнением управления переключением в первом режиме переключения или втором режиме переключения, когда скорость Nm вращения мотора 32 находится в области за пределами и первой резонансной области, и второй резонансной области, выполнение управления переключением в режиме с прямоугольным сигналом в этой области, как в этом модифицированном примере, может уменьшать потерю на переключение и увеличивать энергоэффективность.
[0030] В то время как электрическое транспортное средство 20 варианта осуществления включает в себя мотор 32, инвертор 34, аккумулятор 36 и повышающий преобразователь 40, контроллер может вместо этого быть установлен в транспортном средстве, которое не включает в себя повышающий преобразователь 40. Также в этом случае, сглаживающий конденсатор предусматривается между аккумулятором 36 и инвертором 34, и, таким образом, LC-контур формируется посредством дроссельного компонента в контуре (например, дроссельного компонента аккумулятора 36) и конденсатора. Соответственно, резонанс возникает, когда частота колебания электрического тока 6-го порядка или частота колебания электрического тока 12-го порядка принадлежит резонансной области LC-контура, сформированного дроссельным компонентом и конденсатором. Следовательно, это транспортное средство может управляться таким же образом, что и в варианте осуществления или его модифицированном примере, чтобы подавлять резонанс вследствие частотной составляющей низкого порядка для электричества, которое приводит в действие мотор 32, а также резонанс вследствие его частотной составляющей высокого порядка.
[0031] В то время как электрическое транспортное средство 20 варианта осуществления включает в себя единственный мотор 32 и инвертор 34, который приводит в действие мотор 32, контроллер может вместо этого быть установлен в транспортном средстве, которое включает в себя множество моторов 32 и множество инверторов, которые соответственно приводят в действие эти моторы. В этом случае, с областью резонанса вследствие частотной составляющей колебания электрического тока 6-го порядка каждого мотора, определенной в качестве первой резонансной области, и с областью резонанса вследствие частотной составляющей колебания электрического тока 12-го порядка каждого мотора, определенной в качестве второй резонансной области, процедура управления с прямоугольным сигналом варианта осуществления или модифицированных примеров может быть выполнена для каждого мотора.
[0032] В то время как аккумулятор 36 используется в качестве устройства аккумулирования электричества в электрическом транспортном средстве 20 варианта осуществления, может быть использовано любое устройство, которое может хранить электричество, например, конденсатор.
[0033] Контроллер устанавливается в электрическом транспортном средстве 20, включающем в себя мотор 32 в варианте осуществления. Однако, контроллер может вместо этого быть установлен в гибридном электрическом транспортном средстве, включающем в себя двигатель в дополнение к мотору 32.
[0034] Соответствующее соотношение между главными компонентами варианта осуществления и главными компонентами изобретения, описанными в разделе "Сущность изобретения", является следующим: Мотор 32, инвертор 34, аккумулятор 36 и электронный блок 50 управления в варианте осуществления являются примерами мотора, инвертора, устройства аккумулирования электричества и электронного блока управления, соответственно.
[0035] В то время как режим выполнения настоящего изобретения был описан выше с помощью варианта осуществления, следует понимать, что настоящее изобретение никоим образом не ограничивается таким вариантом осуществления, но может быть реализовано в различных режимах в рамках сущности изобретения.
[0036] Настоящее изобретение является применимым, например, к отрасли, которая производит контроллеры транспортных средств с электрическим приводом.



Настоящее изобретение относится к контроллеру транспортного средства с электрическим приводом. Причем контроллер устанавливается в транспортном средстве с электрическим приводом, включающем в себя мотор для движения, инвертор, который приводит в действие мотор, и устройство аккумулирования электричества, которое обменивается электричеством с мотором через инвертор, причем контроллер содержит электронный блок управления, выполненный с возможностью выполнять управление переключением по переключающему элементу инвертора посредством переключения между управлением с широтно-импульсной модуляцией и управлением с прямоугольным сигналом согласно коэффициенту модуляции, при этом электронный блок управления выполнен с возможностью выполнять управление переключением посредством управления с прямоугольным сигналом в первом режиме переключения, когда скорость вращения мотора равна или выше первой предварительно определенной скорости вращения, электронный блок управления выполнен с возможностью выполнять управление переключением посредством управления с прямоугольным сигналом во втором режиме переключения, когда скорость вращения мотора ниже первой предварительно определенной скорости вращения, первая предварительно определенная скорость вращения является скоростью вращения ниже первой резонансной области, первый режим переключения является режимом последовательности переключения, который подавляет LC-резонанс в первой резонансной области, и второй режим переключения является режимом последовательности переключения, который подавляет LC-резонанс во второй резонансной области ниже первой предварительно определенной скорости вращения. Это позволяет подавлять не только резонанс вследствие частотной составляющей низкого порядка для приводящего в действие мотор электричества, но также резонанс вследствие его частотной составляющей высокого порядка. 4 з.п. ф-лы, 8 ил.
1. Контроллер транспортного средства с электрическим приводом, причем контроллер устанавливается в транспортном средстве с электрическим приводом, включающем в себя мотор для движения, инвертор, который приводит в действие мотор, и устройство аккумулирования электричества, которое обменивается электричеством с мотором через инвертор, причем контроллер содержит электронный блок управления, выполненный с возможностью выполнять управление переключением по переключающему элементу инвертора посредством переключения между управлением с широтно-импульсной модуляцией и управлением с прямоугольным сигналом согласно коэффициенту модуляции, при этом
электронный блок управления выполнен с возможностью выполнять управление переключением посредством управления с прямоугольным сигналом в первом режиме переключения, когда скорость вращения мотора равна или выше первой предварительно определенной скорости вращения,
электронный блок управления выполнен с возможностью выполнять управление переключением посредством управления с прямоугольным сигналом во втором режиме переключения, когда скорость вращения мотора ниже первой предварительно определенной скорости вращения,
первая предварительно определенная скорость вращения является скоростью вращения ниже первой резонансной области,
первый режим переключения является режимом последовательности переключения, который подавляет LC-резонанс в первой резонансной области, и
второй режим переключения является режимом последовательности переключения, который подавляет LC-резонанс во второй резонансной области ниже первой предварительно определенной скорости вращения.
2. Контроллер транспортного средства с электрическим приводом по п. 1, при этом
первый режим переключения является режимом последовательности переключения, имеющей три или более импульсов на цикл, с первым полуциклом и последним полуциклом каждого цикла, имеющим один или более импульсов, и первый полуцикл и последний полуцикл каждого цикла имеет одинаковое число периодов, в течение которых полярность напряжения временно переворачивается, и
второй режим переключения является режимом последовательности переключения, имеющей большее число импульсов, чем первый режим переключения.
3. Контроллер транспортного средства с электрическим приводом по п. 2, при этом
второй режим переключения является режимом последовательности переключения, в которой число импульсов в предварительно определенном цикле и электрический угол переключения устанавливаются так, чтобы устранять составляющую высокой частоты предварительно определенного порядка согласно рабочему состоянию мотора, и
второй режим переключения является режимом последовательности переключения, имеющей полуволновую симметрию и нечетную симметрию.
4. Контроллер транспортного средства с электрическим приводом по любому из пп. 1-3, при этом
когда скорость вращения мотора равна или выше второй предварительно определенной скорости вращения, которая равна или выше верхней предельной скорости вращения первой резонансной области,
электронный блок управления выполнен с возможностью выполнять управление переключением в режиме с прямоугольным сигналом последовательности переключения, имеющей один импульс на цикл.
5. Контроллер транспортного средства с электрическим приводом по любому из пп. 1-3, при этом
электронный блок управления выполнен с возможностью выполнять управление переключением посредством управления с прямоугольным сигналом в первом режиме переключения, когда скорость вращения мотора находится в первой резонансной области,
электронный блок управления выполнен с возможностью выполнять управление переключением посредством управления с прямоугольным сигналом во втором режиме переключения, когда скорость вращения мотора находится во второй резонансной области, и
электронный блок управления выполнен с возможностью выполнять управление переключением посредством управления с прямоугольным сигналом в режиме прямоугольного сигнала, когда скорость вращения мотора находится за пределами как первой резонансной области, так и второй резонансной области, причем режим прямоугольного сигнала является режимом последовательности переключения, имеющей один импульс на цикл.
| US 2009237019 A1, 24.09.2009 | |||
| WO 2015087700 A1, 18.06.2015 | |||
| US 8222776 B2, 17.07.2012 | |||
| СИСТЕМА ПОДВЕСКИ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА, СОДЕРЖАЩАЯ ЭЛЕКТРОМАГНИТНЫЙ ПРИВОД | 2009 |
|
RU2448000C2 |

