Область техники
[0001] Настоящее изобретение относится к устройству управления для гибридного транспортного средства.
Уровень техники
[0002] В публикации нерассмотренной заявки на патент Японии № 2014-162261 A описано традиционное устройство управления для гибридного транспортного средства, сконфигурированное так, чтобы подготавливать план движения, разделяющий планируемый маршрут до пункта назначения на множество участков и классифицирующий участки на EV-участки для движения за счет EV-режима и HV-участки для движения за счет HV-режима.
Сущность изобретения
[0004] Однако, вышеупомянутое традиционное устройство управления гибридного транспортного средства не учитывает объем топлива, требуемого для прогрева каталитического нейтрализатора для очистки выхлопного газа двигателя внутреннего сгорания, при подготовке плана движения. По этой причине, при движении транспортного средства в соответствии с планом движения, число раз прогрева каталитического нейтрализатора увеличивается, и топливная экономичность была имеет тенденцию к ухудшению.
[0005] Настоящее изобретение было выполнено с учетом такой проблемы и имеет своей целью сдерживание роста числа раз прогрева каталитического нейтрализатора, с тем, чтобы сдерживать рост объема топлива, расходуемого для прогрева каталитического нейтрализатора.
[0006] Чтобы решать вышеописанную проблему, согласно одному аспекту настоящего изобретения, предоставляется устройство управления гибридного транспортного средства для управления гибридным транспортным средством, снабженным двигателем внутреннего сгорания, перезаряжаемым аккумулятором и вращающейся электрической машиной, приводимой в действие посредством электрической мощности аккумулятора, устройство управления содержит часть подготовки плана движения, подготавливающую план движения, устанавливающий одну или более промежуточных точек на планируемом маршруте от начальной точки до пункта назначения, чтобы делить планируемый маршрут на множество маршрутов движения и дополнительно делить маршруты движения на множества участков движения и устанавливать участки движения для проезда посредством одного режима движения из EV-режима для движения с помощью электрической мощности аккумулятора в качестве основного источника мощности или HV-режима для движения с помощью двигателя внутреннего сгорания в качестве основного источника мощности, и содержит часть переключения режима движения, переключающую режимы движения в соответствии с планом движения. Часть подготовки плана движения конфигурируется, чтобы иметь возможность подготовки плана движения, устанавливающего режимы движения для всех участков движения, по меньшей мере, на одном маршруте движения в EV-режим.
[0007] Согласно этому аспекту настоящего изобретения, представляется возможным сдерживать рост числа раз прогрева каталитического нейтрализатора и сдерживать объем топлива, расходуемого для прогрева каталитического нейтрализатора.
Краткое описание чертежей
[0008] Фиг. 1 – схематичный вид конфигурации транспортного средства и электронного блока управления, управляющего транспортным средством согласно первому варианту осуществления настоящего изобретения.
Фиг. 2A – блок-схема последовательности операций для объяснения подготовки плана движения согласно первому варианту осуществления настоящего изобретения.
Фиг. 2B – блок-схема последовательности операций для объяснения подготовки плана движения согласно первому варианту осуществления настоящего изобретения.
Фиг. 3A – чертеж для объяснения подготовки первого плана движения, оптимизирующего движение для одной поездки.
Фиг. 3B – чертеж для объяснения подготовки первого плана движения, оптимизирующего движение для одной поездки.
Фиг. 3C – чертеж для объяснения подготовки первого плана движения, оптимизирующего движение для одной поездки.
Фиг. 4A – вид, объясняющий подготовку второго плана движения согласно первому варианту осуществления настоящего изобретения, оптимизирующего множество поездок.
Фиг. 4B – вид, объясняющий подготовку второго плана движения согласно первому варианту осуществления настоящего изобретения, оптимизирующего множество поездок.
Фиг. 4C – вид, объясняющий подготовку второго плана движения согласно первому варианту осуществления настоящего изобретения, оптимизирующего множество поездок.
Фиг. 5A – блок-схема последовательности операций для объяснения подготовки плана движения согласно второму варианту осуществления настоящего изобретения.
Фиг. 5B – блок-схема последовательности операций для объяснения подготовки плана движения согласно второму варианту осуществления настоящего изобретения.
Фиг. 6A – вид, объясняющий подготовку второго плана движения согласно второму варианту осуществления настоящего изобретения, оптимизирующего множество поездок.
Фиг. 6B – вид, объясняющий подготовку второго плана движения согласно второму варианту осуществления настоящего изобретения, оптимизирующего множество поездок.
Фиг. 6C – вид, объясняющий подготовку второго плана движения согласно второму варианту осуществления настоящего изобретения, оптимизирующего множество поездок.
Фиг. 6D – вид, объясняющий подготовку второго плана движения согласно второму варианту осуществления настоящего изобретения, оптимизирующего множество поездок.
Фиг. 6E – вид, объясняющий подготовку второго плана движения согласно второму варианту осуществления настоящего изобретения, оптимизирующего множество поездок.
Фиг. 7 – вид, показывающий один пример второго плана движения (плана движения с приоритетом маршрута).
Фиг. 8A – вид, объясняющий подготовку второго плана движения согласно третьему варианту осуществления настоящего изобретения, оптимизирующего множество поездок.
Фиг. 8B – вид, объясняющий подготовку второго плана движения согласно третьему варианту осуществления настоящего изобретения, оптимизирующего множество поездок.
Фиг. 9 – блок-схема последовательности операций, объясняющая регулирование роста температуры каталитического нейтрализатора согласно третьему варианту осуществления настоящего изобретения.
Фиг. 10 – схематичный вид конфигурации транспортного средства и электронного блока управления, управляющего транспортным средством согласно четвертому варианту осуществления настоящего изобретения.
Фиг. 11 – блок-схема последовательности операций, объясняющая регулирование роста температуры каталитического нейтрализатора согласно четвертому варианту осуществления настоящего изобретения.
Фиг. 12 – блок-схема, схематично показывающая конфигурацию транспортного средства и устройства управления, управляющего транспортным средством согласно пятому варианту осуществления настоящего изобретения.
Фиг. 13A – вид, объясняющий подготовку второго плана движения согласно модификации настоящего изобретения, оптимизирующего множество поездок.
Фиг. 13B – вид, объясняющий подготовку второго плана движения согласно модификации настоящего изобретения, оптимизирующего множество поездок.
Фиг. 13C – вид, объясняющий подготовку второго плана движения согласно модификации настоящего изобретения, оптимизирующего множество поездок.
Фиг. 13D – вид, объясняющий подготовку второго плана движения согласно модификации настоящего изобретения, оптимизирующего множество поездок.
Фиг. 13E – вид, объясняющий подготовку второго плана движения согласно модификации настоящего изобретения, оптимизирующего множество поездок.
Фиг. 13F – вид, объясняющий подготовку второго плана движения согласно модификации настоящего изобретения, оптимизирующего множество поездок.
Подробное описание вариантов осуществления изобретения
[0009] Ниже, обращаясь к чертежам, варианты осуществления настоящего изобретения будут объяснены подробно. Следует отметить, что в нижеприведенном пояснении, аналогичным составляющим элементам назначаются идентичные номера ссылок.
[0010] Первый вариант осуществления
Фиг. 1 представляет собой схематичный вид конфигурации транспортного средства 100 и электронного блока 200 управления, управляющего транспортным средством 100 согласно первому варианту осуществления настоящего изобретения.
[0011] Транспортное средство 100 согласно настоящему варианту осуществления является гибридным транспортным средством, снабженным двигателем 10 внутреннего сгорания, делящим механизмом 20, первой вращающейся электрической машиной 30, второй вращающейся электрической машиной 40, аккумулятором 50, повышающим преобразователем 60, первым инвертором 70 и вторым инвертором 80, и конфигурируется, чтобы иметь возможность передачи мощности одному или обоим из двигателя 10 внутреннего сгорания и второй вращающейся электрической машины 40 через конечную понижающую передачу 1 к валу 2 привода колес. Дополнительно, транспортное средство 100 снабжается, в дополнение к двигателю 10 внутреннего сгорания, картографической базой данных 95, GPS-приемником 96 и навигационной системой 97.
[0012] Двигатель 10 внутреннего сгорания выполняет сжигание топлива внутри цилиндра 12, сформированного в корпусе 11 двигателя, чтобы вызывать формирование мощности для принудительного вращения выходного вала 13, соединенного с коленчатым валом. Выхлопной газ, выпущенный из цилиндра 12 в выхлопной канал 14, протекает через выхлопной канал 14 и выпускается в атмосферу. В выхлопном канале 14 предусматривается устройство 15 каталитического нейтрализатора для устранения вредных веществ из выхлопного газа. Устройство 15 каталитического нейтрализатора 15 состоит, например, из сотообразной подложки 151, несущей окислительный нейтрализатор или трехкомпонентный нейтрализатор или другой каталитический нейтрализатор, имеющий функцию очистки выхлопного газа (каталитический нейтрализатор для очистки выхлопного газа) на своей поверхности. Ниже по потоку от подложки 151 предусматривается датчик 210 температуры каталитического нейтрализатора для обнаружения температуры каталитического нейтрализатора.
[0013] Механизм 20 деления мощности является планетарной передачей для деления мощности двигателя 10 внутреннего сгорания в две системы для мощности для вращения вала 2 привода колеса и мощности для привода первой вращающейся электрической машины 30 в режиме рекуперации и снабжается солнечным зубчатым колесом 21, коронным зубчатым колесом 22, сателлитами 23 и водилом 24 планетарной передачи.
[0014] Солнечное зубчатое колесо 21 является зубчатым колесом с внешним зацеплением и размещается в центре механизма 20 деления мощности. Солнечное зубчатое колесо 21 соединяется с валом 33 первой вращающейся электрической машины 30.
[0015] Коронное зубчатое колесо 22 является зубчатым колесом с внутренним зацеплением и размещается вокруг солнечного зубчатого колеса 21, так, чтобы становиться концентричным с солнечным зубчатым колесом 21. Коронное зубчатое колесо 22 соединяется с валом 33 второй вращающейся электрической машины 40. Дополнительно, коронное зубчатое колесо 22 внутренним образом соединяет с собой ведущее зубчатое колесо 3 для передачи вращения коронного зубчатого колеса 22 валу 2 привода колеса через конечное замедляющее устройство 1.
[0016] Сателлит 23 является зубчатым колесом с внешним зацеплением. Множество сателлитов размещается между солнечным зубчатым колесом 21 и коронным зубчатым колесом 22, так, чтобы зацепляться с солнечным зубчатым колесом 21 и коронным зубчатым колесом 22.
[0017] Водило 24 планетарной передачи соединяется с выходным валом 13 двигателя 10 внутреннего сгорания и вращается вокруг выходного вала 13. Дополнительно, водило 24 планетарной передачи также соединяется с сателлитами 23, так, чтобы предоставлять возможность сателлитам 23 вращаться (по орбите) вокруг солнечного зубчатого колеса 21, в то же время индивидуально вращаясь на своих осях, когда водило 24 планетарной передачи вращается.
[0018] Первая вращающаяся электрическая машина 30 является, например, трехфазным AC-мотор-генератором синхронного типа и снабжается ротором 31, присоединенным к внешней окружности вала 33, соединенного с солнечным зубчатым колесом 21, и имеющим множество постоянных магнитов, внедренных в его внешнюю окружность, и статором 32, вокруг которого намотана катушка возбуждения, формирующая вращающееся магнитное поле. Первая вращающаяся электрическая машина 30 имеет функцию мотора, принимающего подаваемую мощность от аккумулятора 50 и приводимого в действие в режиме силового вращения, и функцию генератора, принимающего мощность от двигателя 10 внутреннего сгорания и приводимого в действие в режиме рекуперации.
[0019] В настоящем варианте осуществления первая вращающаяся электрическая машина 30, главным образом, используется в качестве генератора. Дополнительно, когда выходной вал 13 принудительно вращается для проворачивания коленчатого вала во время запуска двигателя 10 внутреннего сгорания, она используется в качестве мотора и играет роль стартера.
[0020] Вторая вращающаяся электрическая машина 40 является, например, трехфазным AC-мотор-генератором синхронного типа. Она снабжается ротором 41, присоединенным к внешней окружности вала 43, соединенного с коронным зубчатым колесом 22, и имеющим множество постоянных магнитов, внедренных в его внешнюю круговую часть, и статором 42, вокруг которого намотана катушка возбуждения, формирующая вращающееся магнитное поле. Вторая вращающаяся электрическая машина 40 имеет функцию мотора, принимающего подаваемую мощность от аккумулятора 50 и приводимого в действие в режиме силового вращения, и функцию генератора, принимающего мощность от вала 2 привода колеса и приводимого в действие в режиме рекуперации во время замедления транспортного средства и т.д.
[0021] Аккумулятор 50 является, например, никель-кадмиевой аккумуляторной батареей или никелево-водородной аккумуляторной батареей, литиево-ионным аккумулятором или другой перезаряжаемой аккумуляторной батареей. В настоящем варианте осуществления, в качестве аккумулятора 50, используется литиево-ионная аккумуляторная батарея с номинальным напряжением 200 В или т.п. Аккумулятор 50 электрически соединяется через повышающий преобразователь 60 и т.д. с первой вращающейся электрической машиной 30 и второй вращающейся электрической машиной 40, так, чтобы предоставлять возможность подачи заряженной мощности аккумулятора 50 к первой вращающейся электрической машине 30 и второй вращающейся электрической машине 40 и приводить их в режиме силового вращения и, дополнительно, так, чтобы предоставлять возможность сгенерированной мощности первой вращающейся электрической машины 30 и второй вращающейся электрической машины 40 заряжать аккумулятор 50.
[0022] Кроме того, аккумулятор 50, например, конфигурируется, чтобы иметь возможность электрически соединяться с внешним источником мощности через схему 51 управления зарядом и зарядную крышку 52, так что становится возможной зарядка от домашней розетки питания или другого внешнего источника питания. Транспортное средство 100 согласно настоящему варианту осуществления образует так называемое "гибридное транспортное средство со штепсельным соединением". Схема 51 управления зарядом является электрической схемой, приспособленной преобразовывать AC-ток, подаваемый от внешнего источника питания, в DC-ток на основе управляющего сигнала от электронного блока 200 управления и повышать входное напряжение до напряжения аккумулятора, чтобы заряжать электрическую мощность внешнего источника питания в аккумулятор 50.
[0023] Повышающий преобразователь 60 снабжается электрической схемой, повышающей конечное напряжение клеммы первичной стороны и выводящей его с клеммы вторичной стороны на основе управляющего сигнала от электронного блока 200 управления и наоборот понижающей конечное напряжение клеммы вторичной стороны и выводящей его с клеммы первичной стороны на основе управляющего сигнала от электронного блока 200 управления. Клемма первичной стороны повышающего преобразователя 60 соединяется с выходной клеммой аккумулятора 50, в то время как клемма вторичной стороны соединяется с клеммами DC-стороны первого инвертора 70 и второго инвертора 80.
[0024] Первый инвертор 70 и второй инвертор 80 снабжаются электрическими схемами, предоставляющими возможность им преобразовывать постоянные токи, вводимые с клемм DC-стороны, в переменные токи (в настоящем варианте осуществления, трехфазные переменные токи) и выводить их с клемм AC-стороны на основе управляющего сигнала от электронного блока 200 управления и наоборот преобразовывать постоянные токи, вводимые с клемм AC-стороны, в постоянные токи и выводить их с клемм DC-стороны на основе управляющего сигнала электронного блока 200 управления. Клемма DC-стороны первого инвертора 70 соединяется с клеммой вторичной стороны повышающего преобразователя 60, в то время как клемма AC-стороны первого инвертора 70 соединяется с клеммой ввода/вывода первой вращающейся электрической машины 30. Клемма DC-стороны второго инвертора 80 соединяется с клеммой вторичной стороны повышающего преобразователя 60, в то время как клемма AC-стороны второго инвертора 80 соединяется с клеммой ввода/вывода второй вращающейся электрической машины 40.
[0025] Картографическая база данных 95 является базой данных, связанной с картографической информацией. Эта картографическая база данных 95, например, хранится на накопителе на жестком диске (HDD), установленном в транспортном средстве. Картографическая информация содержит позиционную информацию о дорогах и информацию о форме дороги (например, уклонах, типах извилин/прямых участков, радиусах кривизны извилин и т.д.), позиционную информацию о перекрестках и точках ответвления, типах дорог, ограничениях скорости и различную другую дорожную информацию.
[0026] GPS-приемник 96 принимает сигналы от трех или более GPS-спутников, чтобы идентифицировать долготу и широту транспортного средства 100 и обнаруживать текущую позицию транспортного средства 100. GPS-приемник 96 передает обнаруженную текущую позиционную информацию транспортного средства 100 электронному блоку 200 управления.
[0027] Навигационная система 97 задает планируемый маршрут транспортного средства на основе текущей позиционной информации транспортного средства 100, обнаруженной посредством GPS-приемника 96, или картографической информации из картографической базы данных 95, пункта назначения, который задает водитель, и т.д. и передает информацию, связанную с заданным планируемым маршрутом, в качестве навигационной информации электронному блоку 200 управления.
[0028] Электронный блок 200 управления является микрокомпьютером, снабженным компонентами, соединенными друг с другом посредством двухсторонней шины, такими как центральный процессор (CPU), постоянное запоминающее устройство (ROM), оперативное запоминающее устройство (RAM), порт ввода и порт вывода.
[0029] Электронный блок 200 управления принимает в качестве входных данных выходные сигналы от различных датчиков, таких как SOC-датчик 211, обнаруживающий величину заряда аккумулятора, или датчик 212 нагрузки, формирующий выходное напряжение, пропорциональное величине нажатия педали 220 акселератора, датчик 213 угла поворота коленчатого вала, формирующий в качестве сигнала для вычисления скорости вращения двигателя и т.д. выходной импульс каждый раз, когда коленчатый вал корпуса 11 двигателя поворачивается, например, на 15°, и переключатель 214 запуска для оценки запуска и остановки транспортного средства 100.
[0030] Электронный блок 200 управления приводит в действие управляющие компоненты, чтобы управлять транспортным средством 100 на основе выходных сигналов различных датчиков, которые вводятся и т.д. Ниже, будет объяснено управление транспортным средством 100 согласно настоящему варианту осуществления, которое выполняет электронный блок 200 управления.
[0031] Электронный блок 200 управления переключает режим движения либо в EV- (электрическое транспортное средство) режим, либо HV- (гибридное транспортное средство) режим, чтобы приводить в движение транспортное средство 100.
[0032] EV-режим является режимом, в котором заряженная электрическая мощность аккумулятора 50 используется на приоритетной основе для операции привода второй вращающейся электрической машины 40, и мощность, по меньшей мере, второй вращающейся электрической машины 40 передается валу 2 привода колеса для привода транспортного средства 100.
[0033] Когда режим движения является EV-режимом, в состоянии, принудительно останавливающим двигатель 10 внутреннего сгорания, электронный блок 200 управления, в основном, использует заряженную электрическую мощность аккумулятора 50 для привода второй вращающейся электрической машины 40 посредством операции привода от мощности и использует только мощность второй вращающейся электрической машины 40, чтобы принудительно вращать вал 2 привода колеса, чтобы приводить в движение транспортное средство 100.
[0034] С другой стороны, HV-режим является режимом, в котором двигатель 10 внутреннего сгорания задействуется, и сформированная электрическая мощность первой вращающейся электрической машины 30 используется на приоритетной основе для привода второй вращающейся электрической машины 40 посредством операции привода от мощности, и мощность двигателя 10 внутреннего сгорания и второй вращающейся электрической машины 40 передается валу 2 привода колеса, чтобы приводить в движение транспортное средство 100.
[0035] Когда режим движения является HV-режимом, электронный блок 200 управления делит мощность двигателя 10 внутреннего сгорания на две системы посредством механизма 20 деления мощности, передает одну разделенную мощность двигателя 10 внутреннего сгорания валу 2 привода колеса и использует другую мощность для привода первой вращающейся электрической машины 30 посредством рекуперативного действия. Дополнительно, в основном, сформированная электрическая мощность первой вращающейся электрической машины 30 используется для привода второй вращающейся электрической машины 40 посредством действия привода от мощности, и мощность второй вращающейся электрической машины 40 передается валу 2 привода колеса в дополнение к первой мощности двигателя 10 внутреннего сгорания, чтобы приводить в движение транспортное средство 100.
[0036] В случае гибридного транспортного средства, приспособленного переключать режим движения между EV-режимом и HV-режимом таким способом, чтобы сдерживать рост величины расхода топлива, желательно устанавливать EV-режим на приоритетной основе в качестве режима движения, в то время как существует запас в величине заряда аккумулятора.
[0037] С другой стороны, двигатель 10 внутреннего сгорания склонен иметь плохой тепловой КПД, чем ниже нагрузка двигателя. По этой причине, например, во время участка движения с большим числом светофоров, участок движения с большой величиной дорожного движения и легкой перегруженностью или другой участок движения, на котором транспортное средство часто многократно начинает движение и останавливается или продолжает двигаться с низкой скоростью, желательно устанавливать режим движения в EV-режим для движения транспортного средства 100.
[0038] Дополнительно, желательно устанавливать режим движения в HV-режим для движения транспортного средства 100 во время участка движения, предоставляющего возможность непрерывного устойчивого движения с некоторым постоянным уровнем или более скорости транспортного средства, поддерживаемым как есть, или другого участка движения, предоставляющего возможность движения в области нагрузки двигателя с хорошим тепловым КПД.
[0039] Следовательно, в случае гибридного транспортного средства, приспособленного переключать режим движения между EV-режимом и HV-режимом, подготовка заранее плана движения, указывающего, на каких участках движения по планируемому маршруту в одной поездке до пункта назначения (между моментом, когда переключатель 214 запуска транспортного средства включается, и моментом, когда он выключается) двигаться посредством EV-режима, и переключение режимов движения согласно этому плану движения, можно сказать, должно быть эффективным средством для сдерживания роста объема топлива, требуемого для движения.
[0040] Однако, такой традиционный план движения был планом движения, оптимизирующим движение для одной поездки, и не учитывал вовсе топливо, чрезмерно расходуемое для прогрева каталитического нейтрализатора для очистки выхлопного газа двигателя 10 внутреннего сгорания. Т.е., при первом запуске двигателя 10 внутреннего сгорания в каждой поездке, топливо чрезмерно расходуется для стимулирования прогрева каталитического нейтрализатора для обеспечения характеристики выхлопа, но, в прошлом, план движения подготавливался без учета этой величины расхода топлива для прогрева каталитического нейтрализатора.
[0041] Здесь, например, рассматривается случай поездки туда и обратно между домом и работой, случай циркулирования между множеством пунктов назначения (промежуточных точек) и возврата домой или другую первоначальную точку начала движения или иное движение по всему маршруту движения, состоящему из множества поездок (в первом случае, две поездки для исходящей и обратной поездки, в последнем случае, например, три поездки, если существуют два пункта назначения).
[0042] Например, если рассматривается случай движения туда и обратно между домом и работой, традиционный план движения оптимизирует исходящую и обратную поездки, таким образом, иногда HV-участки (участки движения, где режим движения устанавливается в HV-режим) устанавливаются на обоих из исходящего и обратного маршрутов движения. При этом, топливо для прогрева каталитического нейтрализатора чрезмерно расходуется, по меньшей мере, один раз, для каждой из исходящей и обратной поездок.
[0043] В противоположность этому, если представляется возможным подготавливать план движения, приспособленный для оптимизации движения для всего маршрута движения, состоящего из множества поездок, и двигаться полностью в EV-режиме в течение одного из исходящего и обратного маршрутов движения, единственное действие для прогрева каталитического нейтрализатора является достаточным, таким образом, представляется возможным сдерживать рост потребления топлива для прогрева каталитического нейтрализатора. В результате, если посмотреть суммарную величину расхода топлива в случае поездки туда и обратно между домом и работой, по сравнению со случаем оптимизации поездки для каждой из исходящей и обратной поездки аналогично традиционному плану движения, иногда представляется возможным сдерживать рост потребления топлива для прогрева каталитического нейтрализатора и сдерживать рост суммарной величины расхода топлива.
[0044] Следовательно, в настоящем варианте осуществления, представляется возможным подготавливать план движения, приспособленный уменьшать число раз прогрева каталитического нейтрализатора. Ниже, подготовка плана движения согласно настоящему варианту осуществления будет объяснена со ссылкой на фиг. 2A-4C.
[0045] Фиг. 2A и фиг. 2B являются блок-схемами последовательности операций для объяснения подготовки плана движения согласно настоящему варианту осуществления. Дополнительно, фиг. 3A-3C объясняют подготовку первого плана движения (план движения на участке), оптимизирующего движение для одной поездки, в то время как фиг. 4A-4C являются видами, объясняющими подготовку второго плана движения (план движения по маршруту), оптимизирующего множество поездок.
[0046] На этапе S1 электронный блок 200 управления, как показано на фиг. 3A, задает одну или более промежуточных точек на планируемом маршруте от начальной точки до пункта назначения, чтобы приблизительно делить планируемый маршрут на множество маршрутов движения и делить маршруты движения более точно на множества участков движения. Дополнительно, он задает фактические номера "i" (i=1,…, n; в примере, показанном на фиг. 3A, n=10) участков для участков движения в порядке от начальной точки и задает фактические номера "i" (i=1,…,n; в примере, показанном на фиг. 3A, n=2) маршрутов для маршрутов движения.
[0047] Здесь, начальной точкой и пунктом назначения, например, делаются домашний гараж или другое основное местоположение хранения транспортного средства 100. Отметим, что, если транспортное средство 100, подготавливающее план движения, является гибридным транспортным средством со штепсельным соединением аналогично настоящему варианту осуществления, представляется возможным задавать начальной точкой или пунктом назначения место зарядки со штепсельным соединением.
[0048] Дополнительно, промежуточной точкой задается конечная точка одной поездки. Например, ей задается пункт назначения, заданный в начальной точке (будущий пункт назначения). В дополнение к этому, также, например, в случае транспортного средства, выполняющего рейсы для заданного множества пунктов назначения, пункты назначения могут быть заданы промежуточными точками, в то время как в случае транспортного средства, используемого для совершения ежедневных поездок на работу или ежедневных поездок в школу, место работы или местоположение школы могут быть заданы промежуточной точкой. Задавая промежуточные точки на планируемом маршруте таким способом, становится возможным подготавливать план движения, соответствующий множеству поездок.
[0049] На этапе S2 электронный блок 200 управления вычисляет нагрузки движения для участков движения на основе дорожной информации (например, уклоны и типы дорог, ограничения скорости, средняя кривизна и т.д.) для участков движения. Дополнительно, электронный блок 200 управления, как показано на фиг. 3A, вычисляет EV-соответствия для участков движения и величины расчетной потребляемой электрической мощности для участков движения, когда участки движения проезжаются посредством EV-режима (ниже называется "потребляемой электрической мощностью участка"), на основе нагрузок движения для участков движения. EV-соответствие является показателем, выражающим, до какой степени каждый участок движения подходит для EV-движения, и задается более высоким значением, чем ниже нагрузка движения для каждого участка движения (т.е., более подходящим для EV-движения).
[0050] На фиг. 3A, чтобы облегчить понимание изобретения, EV-соответствие описывается упрощенно посредством классификации EV-соответствия на основе нагрузки движения для каждого участка движения от "1" (низкое EV-соответствие) до "3" (высокое EV-соответствие). Дополнительно, потребляемая электрическая мощность участка также описывается упрощенно посредством классификации потребляемой электрической мощности участка в соответствии с ее величиной от "1" (небольшая потребляемая электрическая мощность участка) до "3" (большая потребляемая электрическая мощность участка).
[0051] На этапе S3 электронный блок 200 управления вычисляет величину расчетного расхода TE мощности при движении по планируемому маршруту посредством EV-режима (ниже называется "суммарной потребляемой электрической мощностью") на основе потребляемой электрической мощности участка для участков движения.
[0052] На этапе S4 электронный блок 200 управления вычисляет величину электрической мощности CE аккумулятора 50, приспособленного для использования для EV-движения, на основе величины заряда аккумулятора (ниже называется "пригодной для использования электрической мощностью") и оценивает, равна ли пригодная для использования электрическая мощность CE суммарной потребляемой электрической мощности TE или более. Электронный блок 200 управления переходит к обработке этапа S5, когда пригодная для использования электрическая мощность CE равна суммарной потребляемой электрической мощности TE или более. С другой стороны, электронный блок 200 управления переходит к обработке этапа S6, когда пригодная для использования электрическая мощность CE меньше суммарной потребляемой электрической мощности TE.
[0053] На этапе S5 электронный блок 200 управления устанавливает все участки движения в EV-участки, чтобы предоставлять возможность движения по запланированному маршруту посредством EV-режима, если пригодная для использования электрическая мощность CE равна суммарной потребляемой электрической мощности TE или более.
[0054] На этапе S6 электронный блок 200 управления, как показано на фиг. 3B, выполняет первую обработку сортировки, чтобы переупорядочивать участки движения, и задает отсортированные номера "i" (i=1,…, n; в примере, показанном на фиг. 3B, n=10) участков для участков движения в переупорядоченном порядке. В частности, электронный блок 200 управления, как показано на фиг. 3B, игнорирует маршрут движения и переупорядочивает участки движения в порядке понижения от наивысшего EV-соответствия. Он переупорядочивает участки движения с одинаковым EV-соответствием в порядке повышения от наименьшей потребляемой электрической мощности участка. Если потребляемая электрическая мощность участка также является одинаковой, он переупорядочивает участки движения в порядке повышения от наименьшего фактического номера участка.
[0055] На этапе S7 электронный блок 200 управления оценивает присутствие какого-либо отсортированного номера "k" участка, удовлетворяющего следующему неравенству (1). Отметим, что DE показывает сложенное значение, полученное посредством сложения потребляемой электрической мощности участка в порядке понижения от участка движения с наивысшим EV-соответствием и повышения от наименьшей потребляемой электрической мощности участка. В неравенстве (1) DEk является суммарным значением (сложенным значением) потребляемой электрической мощности участка для участков движения от отсортированного номера 1 участка до отсортированного номера "k" участка, в то время как DEk+1 является суммарным значением (сложенным значением) потребляемой электрической мощности участка для участков движения от отсортированного номера 1 участка до отсортированного номера k+1 участка:
DEk≤CE<DEk+1 … (1)
[0056] В частности, электронный блок 200 управления решает, что не существует отсортированного номера "k" участка, удовлетворяющего неравенству (1), если потребляемая электрическая мощность DE1 участка для участка движения, когда отсортированный номер "k" участка равен 1, больше пригодной для использования электрической мощности CE. В этом случае, электронный блок 200 управления решает, что не существует участок движения, на котором движение возможно в EV-режиме, и переходит к обработке этапа S8. С другой стороны, электронный блок 200 управления решает, что существует отсортированный номер "k" участка, удовлетворяющий неравенству (1), если потребляемая электрическая мощность DE1 участка для участка движения с отсортированным номером "k" участка, равным 1, равна пригодной для использования электрической мощности CE или меньше, и переходит к обработке этапа S9.
[0057] На этапе S9 электронный блок 200 управления вычисляет отсортированный номер "k" участка, удовлетворяющий неравенству (1).
[0058] На этапе S10 электронный блок 200 управления, как показано на фиг. 3B, устанавливает участки движения от отсортированного номера 1 участка до отсортированного номера "k" участка (в примере, показанном на фиг. 3B, k=6) в EV-участки (участки движения, на которых режим движения устанавливается в EV-режим) и устанавливает участки движения от отсортированного номера k+1 участка до отсортированного номера "n" участка в HV-участки. Дополнительно, электронный блок 200 управления, как показано на фиг. 3C, снова переупорядочивает участки движения в порядке фактических номеров участков, чтобы, тем самым, подготавливать первый план движения (план движения участка).
[0059] На этапе S11 электронный блок 200 управления, как показано на фиг. 3C, вычисляет расчетные значения объемов топлива, расходуемого для движения на HV-участках (ниже называются "объемами расходуемого топлива участка"), и вычисляет объем расходуемого топлива DF1 для движения в первом плане движения, состоящий из их суммарного значения, на основе дорожной информации для участков движения, заданных в качестве HV-участков в первом плане движения.
[0060] Дополнительно, электронный блок 200 управления вычисляет расчетные значения объемов топлива, расходуемого для прогрева каталитического нейтрализатора на маршрутах движения, на которых HV-участки задаются в первом плане движения (ниже называются "объемами расходуемого топлива для прогрева на маршруте"), и вычисляет объем расходуемого топлива HF1 для прогрева в первом плане движения, состоящий из их суммарного значения. В настоящем варианте осуществления, как показано на фиг. 3C, учитывается, что топливо расходуется для прогрева каталитического нейтрализатора на участках движения, на которых режим сначала переключается в HV-режим на маршрутах движения, т.е., на участках движения, где режим сначала переключается в HV-режим в поездках.
[0061] На этапе S12 электронный блок 200 управления вычисляет расчетное значение объема топлива TF1, расходуемого при переключении режимов движения согласно первому плану движения во время движения по запланированному маршруту (ниже называется "объемом первого суммарного расхода топлива"). В частности, электронный блок 200 управления, как показано на фиг. 3C, складывает объем расходуемого топлива DF1 для движения и объем расходуемого топлива HF1 для прогрева в первом плане движения, чтобы вычислять объем первого суммарного расхода TF1 топлива.
[0062] На этапе S13 электронный блок 200 управления, как показано на фиг. 4A, вычисляет величины расчетной потребляемой электрической мощности на маршрутах движения при движении по маршрутам движения посредством EV-режима (ниже "потребляемая электрическая мощность маршрута") на основе потребляемой электрической мощности участка для участков движения. На фиг. 4A суммарное значение потребляемой электрической мощности участков для упрощенных участков движения для каждого маршрута движения описывается как "потребляемая электрическая мощность маршрута".
[0063] На этапе 14 электронный блок 200 управления, как показано на фиг. 4B, выполняет вторую обработку сортировки, чтобы переупорядочивать маршруты движения и устанавливать отсортированный номер "i" (i=1,…,n) маршрута на маршрутах движения в переупорядоченном порядке. В частности, электронный блок 200 управления, как показано на фиг. 4B, переупорядочивает маршруты движения в порядке повышения от наименьшей потребляемой электрической мощности маршрута.
[0064] На этапе S15 электронный блок 200 управления оценивает, существует ли отсортированный номер "k" маршрута, удовлетворяющий следующему неравенству (2). Отметим, что RE показывает сложенное значение, полученное сложением потребляемой электрической мощности маршрута в порядке повышения от маршрута движения с наименьшей потребляемой электрической мощностью маршрута. В неравенстве (2) REk является суммарным значением (сложенным значением) потребляемой электрической мощности маршрута для маршрутов движения от отсортированного номера 1 маршрута до отсортированного номера "k" маршрута, в то время как REk+1 является суммарным значением (сложенным значением) потребляемой электрической мощности маршрута для маршрутов движения от отсортированного номера 1 маршрута до отсортированного номера k+1 маршрута:
REk≤CE<REk+1 … (2)
[0065] В частности, электронный блок 200 управления решает, что не существует отсортированного номера "k" маршрута, удовлетворяющего неравенству (2), если потребляемая электрическая мощность RE1 маршрута для маршрута движения, когда отсортированный номер "k" маршрута равен 1, больше пригодной для использования электрической мощности CE. В этом случае, электронный блок 200 управления решает, что не существует маршрута движения, по которому можно проехать в EV-режиме как есть, и переходит к обработке этапа S21. С другой стороны, электронный блок 200 управления решает, что существует отсортированный номер "k" маршрута, удовлетворяющий неравенству (2), если потребляемая электрическая мощность RE1 маршрута для маршрута движения, когда отсортированный номер "k" маршрута равен 1, равна пригодной для использования электрической мощности CE или меньше, и переходит к обработке этапа S16.
[0066] На этапе S16 электронный блок 200 управления вычисляет отсортированный номер "k" маршрута, удовлетворяющий неравенству (2).
[0067] На этапе S17 электронный блок 200 управления, как показано на фиг. 4B, устанавливает маршруты движения до отсортированного номера "k" маршрута (в примере, показанном на фиг. 4B, k=1) в EV-маршруты, на которых все участки движения на маршруте движения заданы EV-участками, и устанавливает маршруты движения от отсортированного номера k+1 маршрута до отсортированного номера "n" маршрута в HV-маршруты, на которых все участки движения на маршруте движения заданы HV-участками. Дополнительно, электронный блок 200 управления, как показано на фиг. 4C, снова переупорядочивает маршруты движения в порядке фактических номеров маршрутов, чтобы, тем самым, подготавливать второй план движения (план движения маршрута).
[0068] На этапе S18 электронный блок 200 управления, как показано на фиг. 4C, вычисляет объемы расходуемого топлива участка для HV-участков на основе дорожной информации для участков движения, заданных в качестве HV-участков во втором плане движения, и вычисляет объем расходуемого топлива DF2 для движения во втором плане движения, состоящий из их суммарного значения.
[0069] Дополнительно, электронный блок 200 управления вычисляет объемы расходуемого топлива для прогрева на маршруте для маршрутов движения, на которых HV-участки заданы во втором плане движения, и вычисляет объем расходуемого топлива HF2 для прогрева во втором плане движения, состоящий из их суммарного значения. Как показано на фиг. 4C, во втором плане движения согласно настоящему варианту осуществления, объем расходуемого топлива для прогрева на маршруте формируется только на маршруте движения с фактическим номером маршрута, равным 1.
[0070] На этапе S19 электронный блок 200 управления вычисляет расчетное значение объема топлива TF2, расходуемого при переключении режимов движения согласно второму плану движения во время движения по запланированному маршруту (ниже называется "величиной второго суммарного расхода топлива"). В частности, электронный блок 200 управления, как показано на фиг. 4C, складывает объем расходуемого топлива DF2 для движения и объем расходуемого топлива HF2 для прогрева во втором плане движения, чтобы вычислять величину второго суммарного расхода TF2 топлива.
[0071] На этапе S20 электронный блок 200 управления сравнивает величины объема первого суммарного расхода TF1 топлива и объема второго суммарного расхода TF2 топлива, переходит к обработке этапа S21, когда объем первого суммарного расхода TF1 топлива является меньшим, и переходит к обработке этапа S22, когда объем второго суммарного расхода TF2 топлива является меньшим. Отметим, что, когда объем первого суммарного расхода TF1 топлива и объем второго суммарного расхода TF2 топлива являются одинаковыми, представляется возможным переходить к обработке одного из этапа S21 и этапа S22, но в настоящем варианте осуществления, блоку инструктируется переходить к обработке этапа S22.
[0072] На этапе S21 электронный блок 200 управления применяет первый план движения и выполняет управление переключением режима движения в соответствии с первым планом движения.
[0073] На этапе S22 электронный блок 200 управления применяет второй план движения и выполняет управление переключением режима движения в соответствии со вторым планом движения.
[0074] Как показано на фиг. 3C и фиг. 4C, объем расходуемого топлива DF1 для движения в первом плане движения, оптимизирующем движение для одной поездки, становится меньше объема расходуемого топлива DF2 для движения во втором плане движения, оптимизирующем движение для множества поездок. Однако, если учитывать расходуемое топливо HF1 и HF2 для прогрева в планах движения, в первом плане движения, две операции прогрева каталитического нейтрализатора становятся необходимыми, таким образом, узнается, что объем первого суммарного расхода TF1 топлива становится больше объема второго суммарного расхода TF2 топлива.
[0075] Согласно настоящему варианту осуществления, объясненному выше, предоставляется электронный блок 200 управления (устройство управления) транспортного средства 100 (гибридного транспортного средства), снабженного двигателем 10 внутреннего сгорания, перезаряжаемым аккумулятором 50 и второй вращающейся электрической машиной 40 (вращающейся электрической машиной), приводимой в действие посредством электрической мощности аккумулятора 50, содержащий часть подготовки плана движения, подготавливающую план движения, задающий одну или более промежуточных точек на запланированном маршруте от начальной точки до пункта назначения, чтобы делить этот запланированный маршрут на множество маршрутов движения и дополнительно делить маршруты движения на множество участков движения и задающий режим движения из EV-режима движения с помощью электрической мощности аккумулятора 50 в качестве основного источника мощности или HV-режима движения с помощью двигателя 10 внутреннего сгорания в качестве основного источника мощности для движения по каждому участку движения, и часть переключения режима движения, переключающую режимы движения в соответствии с планом движения.
[0076] Дополнительно, часть подготовки плана движения конфигурируется, чтобы иметь возможность подготовки плана движения, задающего режимы движения для всех участков движения, по меньшей мере, на одном маршруте движения в EV-режим.
[0077] Благодаря этому, на маршруте движения (EV-маршруте), на котором режимы движения всех участков движения на маршруте движения установлены в EV-режим, больше не существует необходимости в прогреве каталитического нейтрализатора, таким образом, представляется возможным сдерживать рост числа раз прогрева каталитического нейтрализатора и сдерживать рост объема топлива, расходуемого для прогрева каталитического нейтрализатора.
[0078] Дополнительно, часть подготовки плана движения согласно настоящему варианту осуществления снабжается частью вычисления расходуемой электрической мощности маршрута, вычисляющей расходуемые электрические мощности маршрута, состоящие из расчетных значений электрической мощности, расходуемой при движении по маршрутам движения посредством EV-режима, и конфигурируется, чтобы подготавливать второй план движения (план движения маршрута), устанавливающий режимы движения всех участков движения на маршрутах движения в EV-режим в порядке повышения от маршрута движения с наименьшей расходуемой электрической мощностью маршрута и устанавливающий маршруты движения всех участков движения на маршрутах движения в HV-режим от маршрутов движения, на которых сложенное значение RE, полученное сложением расходуемой электрической мощности маршрута в порядке повышения от маршрута движения с наименьшей расходуемой электрической мощностью маршрута, превышает пригодную для использования электрическую мощность CE аккумулятора 50 (маршруты движения с отсортированным номером k+1 маршрута и далее).
[0079] Благодаря этому, представляется возможным задавать маршруты движения в качестве EV-маршрутов в порядке понижения от маршрута движения с наивысшей возможностью движения посредством EV-режима. Т.е., представляется возможным увеличивать маршруты движения, приспособленные для установки в качестве EV-маршрутов, насколько возможно, таким образом, представляется возможным подготавливать план движения с возможностью иметь возможность уменьшения числа раз прогрева каталитического нейтрализатора, насколько возможно, чтобы сдерживать рост объема топлива, расходуемого для прогрева каталитического нейтрализатора.
[0080] Дополнительно, часть подготовки плана движения согласно настоящему варианту осуществления снабжается частью вычисления соответствия, вычисляющей EV-соответствия (соответствия) при движении по участкам движения посредством EV-режима, и частью вычисления потребляемой электрической мощности участка, вычисляющей потребляемую электрическую мощность участка, состоящую из расчетных значений электрической мощности, потребляемой при движении по участкам движения посредством EV-режима, и конфигурируется так, чтобы подготавливать первый план движения (план движения участка), устанавливающий режимы движения в EV-режим в порядке понижения от участка движения с наивысшим соответствием и повышения от наименьшей потребляемой электрической мощности участка и устанавливающий режимы движения в HV-режим от участка движения, где сложенное значение DE, полученное сложением потребляемой электрической мощности участка в порядке понижения от участка движения с наивысшим соответствием и повышения от наименьшей потребляемой электрической мощности участка, превышает пригодную для использования электрическую мощность CE аккумулятора (участки движения с отсортированным номером k+1 участка и далее).
[0081] Дополнительно, часть переключения режима движения конфигурируется для переключения режима движения в соответствии со вторым планом движения, когда объем первого суммарного расхода TF1 топлива, состоящий из суммы объемов топлива, расходуемого на маршрутах движения, на которых существуют участки движения, установленные в HV-режим в первом плане движения, больше объема второго суммарного расхода TF2 топлива, состоящего из суммы объемов топлива, расходуемого на маршрутах движения, на которых все участки движения установлены в HV-режим во втором плане движения. Объем первого суммарного расхода TF1 топлива и объем второго суммарного расхода TF2 топлива являются, соответственно, суммами объемов топлива, расходуемого для движения, и объемов топлива, расходуемого для прогрева каталитического нейтрализатора для очистки выхлопного газа двигателя 10 внутреннего сгорания.
[0082] Благодаря этому, сдерживая рост числа раз прогрева каталитического нейтрализатора, представляется возможным не допускать ухудшения топливной экономичности.
[0083] Дополнительно, согласно настоящему варианту осуществления, промежуточная точка задается конечной точкой одной поездки транспортного средства 100, таким образом, представляется возможным подготавливать план движения, оптимизирующий множество поездок.
[0084] Второй вариант осуществления
Далее поясняется второй вариант осуществления настоящего раскрытия сущности. Настоящий вариант осуществления отличается от первого варианта осуществления в содержимом второго плана движения. Ниже в пояснении рассматривается этот отличающийся аспект.
[0085] Фиг. 5A и фиг. 5B являются блок-схемами последовательности операций для объяснения подготовки плана движения согласно настоящему варианту осуществления. На фиг. 5A и фиг. 5B содержимое обработки с этапа S1 по этап S16 и с этапа S18 по этап S22 является, в основном, содержимым, аналогичным первому варианту осуществления, таким образом, объяснение будет пропущено здесь. Дополнительно, фиг. 6A-6E являются видами, объясняющими подготовку второго плана движения (плана движения с приоритетом маршрута) согласно настоящему варианту осуществления, оптимизирующего множество поездок.
[0086] На этапе S31 электронный блок 200 управления, как показано на фиг. 6A, выполняет третью обработку сортировки по участкам движения на маршрутах движения с отсортированного номера k+1 участка до отсортированного номера "n" участка (в примере, показанном на фиг. 6A, k=1, n=2), чтобы переупорядочивать участки движения, и устанавливает вторые отсортированные номера "i" (i=1,…, n; в примере, показанном на фиг. 6A, n=5) участков для участков движения в переупорядоченном порядке. В частности, электронный блок 200 управления, как показано на фиг. 6A, переупорядочивает участки движения по маршрутам движения с отсортированного номера k+1 маршрута до отсортированного номера "n" маршрута в порядке понижения от наивысшего EV-соответствия, переупорядочивает участки движения с одинаковым EV-соответствием в порядке повышения от наименьшей потребляемой электрической мощности участка, и если потребляемая электрическая мощность участка также является одинаковой, дополнительно переупорядочивает участки в порядке повышения от наименьшего фактического номера участка.
[0087] На этапе S32 электронный блок 200 управления вычисляет избыточную электрическую мощность ΔCE аккумулятора 50, состоящую из пригодной для использования электрической мощности CE аккумулятора минус суммарное значение REk расходуемой электрической мощности маршрута для маршрутов движения до отсортированного номера "k" маршрута.
[0088] На этапе S33 электронный блок 200 управления оценивает, существует ли второй отсортированный номер "k" маршрута, удовлетворяющий следующему неравенству (3). Отметим, что EE показывает сложенное значение, полученное сложением второй расходуемой электрической мощности в порядке понижения от участка движения с высоким EV-соответствием и повышения наименьшей потребляемой электрической мощности участка на маршрутах движения от отсортированного номера k+1 маршрута до отсортированного номера "n" маршрута. В неравенстве (3) EEk является суммарным значением (сложенным значением) потребляемой электрической мощности участка для участков движения от второго отсортированного номера 1 участка до второго отсортированного номера "k" участка, в то время как EEk+1 является суммарным значением потребляемой электрической мощности участка для участков движения от второго отсортированного номера 1 участка до отсортированного номера k+1 участка:
EEk≤ΔCE<EEk+1 … (3)
[0089] В частности, электронный блок 200 управления решает, что не существует второго отсортированного номера "k" участка, удовлетворяющего неравенству (3), если потребляемая электрическая мощность EE1 участка для участка движения, когда второй отсортированный номер "k" участка равен 1, больше избыточной электрической мощности ΔCE. В этом случае электронный блок 200 управления решает, что не существует участка движения, приспособленного для движения посредством EV-режима, в участках движения по маршрутам движения от отсортированного номера k+1 маршрута до отсортированного номера "n" маршрута, и переходит к обработке этапа S34. С другой стороны, электронный блок 200 управления решает, что существует второй отсортированный номер "k" участка, удовлетворяющий неравенству (3), если потребляемая электрическая мощность EE1 участка для участка движения, когда второй отсортированный номер "k" участка равен 1, равна избыточной электрической мощности ΔCE или меньше, и переходит к обработке этапа S35.
[0090] На этапе S34 электронный блок 200 управления, тем же способом, что и в первом варианте осуществления, как показано на фиг. 6B, устанавливает маршруты движения до отсортированного номера "k" маршрута (в примере, показанном на фиг. 6B, k=1) в EV-маршруты, на которых все участки движения на маршруте движения заданы EV-участками, и устанавливает маршруты движения от отсортированного номера k+1 участка до отсортированного номера "n" участка в HV-маршруты, на которых все участки движения на маршруте движения заданы HV-участками. Дополнительно, электронный блок 200 управления, как показано на фиг. 6C, переупорядочивает маршруты движения в порядке фактических номеров маршрутов и устанавливает результат в качестве второго плана движения (план движения с приоритетом маршрута).
[0091] На этапе S35 электронный блок 200 управления вычисляет второй отсортированный номер "k" участка, удовлетворяющий неравенству (3).
[0092] На этапе S36 электронный блок 200 управления, как показано на фиг. 6D, устанавливает маршруты движения до отсортированного номера "k" маршрута (в примере, показанном на фиг. 6D, k=1) в EV-маршруты, на которых все участки движения на маршруте движения заданы EV-участками. Дополнительно, электронный блок 200 управления, в отличие от первого варианта осуществления, для участков движения на маршрутах движения от отсортированного номера k+1 маршрута до отсортированного номера "n" маршрута, устанавливает участки движения до второго отсортированного номера "k" участка (в примере, показанном на фиг. 6D, k=1) в EV-участки и устанавливает участки движения от второго отсортированного номера k+1 участка до второго отсортированного номера "n" участка (в примере, показанном на фиг. 6D, n=5) в HV-участки. Дополнительно, электронный блок 200 управления, как показано на фиг. 6E, переупорядочивает участки движения в порядке фактических номеров участков и устанавливает результат в качестве второго плана движения (план движения с приоритетом маршрута).
[0093] Часть подготовки плана движения согласно настоящему варианту осуществления, объясненная выше, снабжается частью вычисления соответствия, вычисляющей EV-соответствия (соответствия) при движении по участкам движения посредством EV-режима, частью вычисления потребляемой электрической мощности участка, вычисляющей потребляемую электрическую мощность участка, состоящую из расчетного значения электрической мощности, потребляемой при движении по участкам движения посредством EV-режима, и частью вычисления потребляемой электрической мощности маршрута, вычисляющей потребляемую электрическую мощность маршрута, состоящую из расчетного значения электрической мощности, потребляемой при проезде по маршрутам движения посредством EV-режима.
[0094] Дополнительно, часть подготовки плана движения конфигурируется, чтобы подготавливать второй план движения (план движения с приоритетом маршрута), устанавливающий маршруты движения до маршрута, где первое сложенное значение RE, полученное сложением потребляемой электрической мощности маршрута в порядке повышения от маршрута движения с наименьшей потребляемой электрической мощностью маршрута, превышает пригодную для использования электрическую мощность CE аккумулятора 50, в EV-маршруты, в которых режимы движения всех участков движения на маршруте движения заданы EV-режимом в порядке повышения от маршрута движения с наименьшей потребляемой электрической мощностью маршрута, устанавливает, для маршрутов движения, на которых первое сложенное значение RE превышает пригодную для использования электрическую мощность CE аккумулятора 50, участки движения до участка, где второе сложенное значение EE, полученное сложением потребляемой электрической мощности участка в порядке понижения от участка движения с наивысшим EV-соответствием и повышения от малой потребляемой электрической мощности участка на маршрутах движения, превышает избыточную электрическую мощность ΔCE аккумулятора 50, состоящую из пригодной для использования электрической мощности CE аккумулятора 50 минус суммарное значение REk потребляемой электрической мощности маршрута для EV-маршрута, в EV-режимы и устанавливает режимы движения в HV–режимы с участка движения, на котором второе сложенное значение EE превышает избыточную электрическую мощность ΔCE аккумулятора 50.
[0095] Благодаря этому, согласно настоящему варианту осуществления, если существует участок движения, который может быть задан в качестве EV-участка с учетом избыточной электрической мощности ΔCE аккумулятора среди участков движения на маршруте движения, заданном в качестве HV-маршрута в первом варианте осуществления, представляется возможным подготавливать второй план движения, устанавливающий участок движения с высоким EV-соответствием среди них в качестве EV-участка с приоритетом. По этой причине, представляется возможным увеличивать, насколько возможно, маршруты движения, приспособленные быть заданными в качестве EV-маршрутов, в то время как представляется возможным устанавливать участок, который был задан в качестве HV-участка в первом варианте осуществления, в качестве EV-участка с помощью избыточной электрической мощности ΔCE аккумулятора, таким образом, представляется возможным сдерживать рост суммарного объема потребляемого топлива при движении по запланированному маршруту.
[0096] Дополнительно, часть подготовки плана движения согласно настоящему варианту осуществления дополнительно конфигурируется, чтобы подготавливать план движения участка, устанавливающий режимы движения в EV-режимы в порядке понижения от участка движения с наивысшим EV-соответствием (соответствием) и повышения от наименьшей потребляемой электрической мощности участка и устанавливающий режимы движения в HV-режимы с участка движения, на котором третье сложенное значение DE, полученное сложением потребляемой электрической мощности участка в порядке понижения от участка движения с наивысшим EV-соответствием и повышения от наименьшей потребляемой электрической мощности участка, превышает пригодную для использования электрическую мощность CE аккумулятора 50.
[0097] Дополнительно, часть переключения режима движения конфигурируется так, чтобы переключать режимы движения в соответствии со вторым планом движения (планом движения с приоритетом маршрута), когда объем первого суммарного расхода TF1 топлива, состоящий из суммы объемов топлива, расходуемого на маршрутах движения, на которых существуют участки движения, установленные в HV-режимы в плане движения участка, больше объема второго суммарного расхода TF2 топлива, состоящего из суммы объемов топлива, расходуемого на маршрутах движения, на которых существуют участки движения, установленные в HV-режимы в плане движения с приоритетом маршрута.
[0098] Благодаря этому, представляется возможным переключать режим движения в соответствии с планом движения, предоставляющим возможность сдерживания роста общего объема потребляемого топлива при движении по запланированному маршруту больше всего.
[0099] Третий вариант осуществления
Далее поясняется третий вариант осуществления настоящего раскрытия сущности. Настоящий вариант осуществления отличается от второго варианта осуществления в том моменте, что температура каталитического нейтрализатора, который был нагрет однажды, удерживается от падения до температуры активации или менее на EV-участках. Ниже в пояснении рассматривается этот отличающийся аспект.
[0100] Часть подготовки плана движения второго варианта осуществления, объясненного выше, была сконфигурирована так, чтобы подготавливать второй план движения (план движения с приоритетом маршрута), устанавливающий участки движения с участков движения с высоким EV-соответствием в качестве EV-участков с приоритетом в случае, когда существует участок движения, приспособленный, чтобы быть установленным в качестве EV-участка с учетом избыточной электрической мощности ΔCE аккумулятора среди участков движения маршрута движения, заданного в качестве HV-маршрута в первом варианте осуществления.
[0101] По этой причине, во втором варианте осуществления, как показано на фиг. 6E, EV-участки устанавливаются на части маршрута движения, заданного в качестве HV-режима в первом варианте осуществления (на фиг. 6E, маршрута движения с фактическим номером маршрута, равным 1). Т.е., формируется маршрут движения, в котором HV-участки и EV-участки смешаны. Если, таким образом, формируется маршрут движения, в котором HV-участки и EV-участки смешаны, имеет склонность к возникновению следующая такая проблема. Ниже, со ссылкой на фиг. 7, эта проблема будет объяснена.
[0102] Фиг. 7 представляет собой вид, показывающий один пример второго плана движения (плана движения с приоритетом маршрута). В примере, показанном на фиг. 7, маршрут движения с фактическим номером маршрута, равным 1, является маршрутом движения с HV-участками и EV-участками, смешанными вместе, в то время как маршрут движения с фактическим номером маршрута, равным 2, является EV-маршрутом.
[0103] Если маршрут движения с HV-участками и EV-участками, смешанными вместе, формируется, например, как показано на фиг. 7, иногда последовательность участков движения, заданных в качестве EV-участков (на фиг. 7, участки движения с фактическими номерами 2-4 участка), продолжается после участка движения, заданного в качестве HV-участка (на фиг. 7 участок движения с фактическим номером участка, равным 1), затем участок движения, заданный в качестве HV-участка (на фиг. 7 участок движения с фактическим номером участка, равным 5), возникает снова.
[0104] Если последовательность участков движения, заданных в качестве EV-участков, продолжается таким образом, время или расстояние движения в EV-режиме становится продолжительнее, таким образом, температура каталитического нейтрализатора, закончившего нагреваться на HV-участке перед EV-участком, склонна приходить к падению до температуры активации, при которой функция очистки выхлопного газа каталитического нейтрализатора активируется, на EV-участке или до меньшей температуры. Таким образом, на HV-участке после EV-участка, каталитический нейтрализатор должен прогреваться снова, таким образом, характеристика выхлопа ухудшается, пока каталитический нейтрализатор не закончит прогреваться, и объем расхода топлива при движении во время переключения режимов движения в соответствии со вторым планом движения приходит к большему увеличению, чем предвиделось.
[0105] Отметим, что, если HV-участок не установлен после EV-участка, двигатель 10 внутреннего сгорания никогда не запускается после EV-участка, таким образом, даже если температура каталитического нейтрализатора падает до температуры активации или менее на EV-участке, такая проблема не возникает.
[0106] Следовательно, в настоящем варианте осуществления, на маршруте движения, состоящем из HV-участков и EV-участков, смешанных вместе, чтобы предохранять температуру каталитического нейтрализатора, прогретого однажды, от падения до температуры активации или менее на EV-участке, когда температура каталитического нейтрализатора на EV-участке падает до заданной контрольной температуры роста температуры выше температуры активации, двигателю 10 внутреннего сгорания временно инструктируется работать, чтобы создавать рост температуры каталитического нейтрализатора, только если HV-участок задан после EV-участка.
[0107] Ниже, подготовка плана движения согласно настоящему варианту осуществления будет объяснена со ссылкой на фиг. 8A и фиг. 8B, затем управление повышением температуры каталитического нейтрализатора согласно варианту осуществления будет объяснено со ссылкой на фиг. 9.
[0108] Блок-схема последовательности операций, относящаяся к подготовке плана движения согласно настоящему варианту осуществления, в основном, является аналогичной блок-схеме последовательности операций на фиг. 5A и фиг. 5B, объясненной во втором варианте осуществления, но обработка этапа S36 частично различается.
[0109] В частности, в настоящем варианте осуществления, на этапе S36, электронный блок 200 управления, как показано на фиг. 8A, тем же образом, что и во втором варианте осуществления, устанавливает маршруты движения вплоть до отсортированного номера "k" маршрута (в примере, показанном на фиг. 8A, k=1) в качестве EV-маршрутов, на которых все участки движения на маршруте движения заданы EV-участками. Дополнительно, электронный блок 200 управления, в отличие от второго варианта осуществления, для участков движения на маршрутах движения от отсортированного номера k+1 маршрута до отсортированного номера "n" маршрута, устанавливает участки движения вплоть до второго отсортированного номера "k" участка (в примере, показанном на фиг. 8A, k=1) в EV-участки, охваченные управлением повышением температуры для температуры каталитического нейтрализатора (ниже называется "IEV-участком"), и устанавливает участки движения от второго отсортированного номера k+1 участка до второго отсортированного номера "n" участка (в примере, показанном на фиг. 8A, n=5) в HV-участки. Дополнительно, электронный блок 200 управления, как показано на фиг. 8B, снова переупорядочивает участки движения в порядке фактических номеров участков и устанавливает результат в качестве второго плана движения (план движения с приоритетом маршрута).
[0110] Фиг. 9 является блок-схемой последовательности операций, объясняющей управление повышением температуры каталитического нейтрализатора согласно настоящему варианту осуществления.
[0111] На этапе S41 электронный блок 200 управления оценивает, был ли каталитический нейтрализатор уже прогрет один раз в текущей поездке. В настоящем варианте осуществления электронный блок 200 управления решает, что каталитический нейтрализатор уже был прогрет один раз в текущей поездке, если уже двигался однажды в HV-режиме в текущей поездке, и затем переходит к обработке этапа S42. С другой стороны, электронный блок 200 управления решает, что каталитический нейтрализатор еще не был прогрет даже однократно в текущей поездке, если еще не двигался однократно в HV-режиме в текущей поездке, и тогда заканчивает текущую обработку.
[0112] На этапе S42 электронный блок 200 управления оценивает, является ли текущий участок движения IEV-участком. Электронный блок 200 управления переходит к обработке этапа S43, если текущий участок движения является IEV-участком. С другой стороны, электронный блок 200 управления заканчивает текущую обработку, если текущий участок движения не является IEV-участком.
[0113] На этапе S43, электронный блок 200 управления оценивает, существует ли HV-участок в оставшихся участках движения текущей поездки. Электронный блок 200 управления переходит к обработке этапа S44, если существует HV-участок в оставшихся участках движения текущей поездки. С другой стороны, электронный блок 200 управления заканчивает текущую обработку, если не существует HV-участок в оставшихся участках движения текущей поездки.
[0114] На этапе S44 электронный блок 200 управления считывает температуру каталитического нейтрализатора, обнаруженную посредством датчика 210 температуры каталитического нейтрализатора. На IEV-участке транспортное средство движется в EV-режиме. Двигатель 10 внутреннего сгорания не работает, таким образом, представляется возможным точно обнаруживать температуру каталитического нейтрализатора посредством датчика 210 температуры каталитического нейтрализатора без влияния выхлопного газа, выпускаемого из двигателя 10 внутреннего сгорания.
[0115] Отметим, что, если датчик 210 температуры каталитического нейтрализатора не предусмотрен, также представляется возможным оценивать температуру каталитического нейтрализатора на основе, например, температуры каталитического нейтрализатора при остановке двигателя 10 внутреннего сгорания, прошедшего времени от остановки двигателя 10 внутреннего сгорания и т.д.
[0116] На этапе S45 электронный блок 200 управления оценивает, является ли температура каталитического нейтрализатора заданной контрольной нижней предельной температурой или более. Контрольная нижняя предельная температура является температурой, соответствующей температуре каталитического нейтрализатора во время холодного запуска двигателя 10 внутреннего сгорания и, например, может быть задана средней температурой наружного воздуха. Контрольная нижняя предельная температура является температурой ниже температуры активации.
[0117] Даже если транспортное средство уже двигалось в HV-режиме один раз в текущей поездке, если время движения является коротким и т.д., возможно, что температура каталитического нейтрализатора не поднимется значительно в целом, и температура каталитического нейтрализатора не изменится значительно в целом от температуры во время холодного запуска двигателя 10 внутреннего сгорания. В таком случае, необходимо прогревать каталитический нейтрализатор на HV-участке после IEV-участка, таким образом, нет необходимости инструктировать двигателю 10 внутреннего сгорания временно работать на IEV-участке, чтобы вызывать повышение температуры каталитического нейтрализатора. По этой причине, электронный блок 200 управления переходит к обработке этапа S46, если температура каталитического нейтрализатора является заданной контрольной нижней предельной температурой или более, и заканчивает текущую обработку, если температура каталитического нейтрализатора меньше контрольной нижней предельной температуры.
[0118] На этапе S46 электронный блок 200 управления оценивает, меньше ли температура каталитического нейтрализатора заданной опорной температуры для повышения температуры. Электронный блок 200 управления переходит к обработке этапа S47, если температура каталитического нейтрализатора меньше опорной температуры для повышения температуры. С другой стороны, электронный блок 200 управления заканчивает текущую обработку, если температура каталитического нейтрализатора равна опорной температуре для повышения температуры или более.
[0119] На этапе S47 электронный блок 200 управления инструктирует двигателю 10 внутреннего сгорания запускаться и инструктирует двигателю 10 внутреннего сгорания работать в течение точно заданного времени, чтобы, тем самым, вызвать повышение температуры каталитического нейтрализатора.
[0120] Отметим, что при переходе к обработке этапа S47 представляется возможным ограничивать запуск двигателя 10 внутреннего сгорания моментом, когда нагрузка движения равна заданной нагрузке или более. Это обусловлено тем, что, например, при инструктировании двигателю 10 внутреннего сгорания работать, в то время как транспортное средство остановилось или во время движения с низкой скоростью или иначе во время низкой нагрузки двигателя, двигателю 10 внутреннего сгорания инструктируется работать в состоянии низкого теплового КПД, таким образом, наоборот, объем расхода топлива склонен увеличиваться.
[0121] Электронный блок 200 управления согласно настоящему варианту осуществления, объясненному выше, конфигурируется, чтобы дополнительно содержать часть управления повышением температуры каталитического нейтрализатора, выполняющую управление повышением температуры каталитического нейтрализатора, вызывающее повышение температуры каталитического нейтрализатора для очистки выхлопного газа, когда температура каталитического нейтрализатора для очистки выхлопного газа становится меньше заданной опорной температуры для повышения температуры, более высокой по сравнению с температурой активации, когда функция очистки выхлопного газа каталитического нейтрализатора для очистки выхлопного газа активируется, в случае переключения режимов движения в соответствии со вторым планом движения (планом движения с приоритетом маршрута) при движении на участке движения по маршруту движения, отличному от EV-маршрута, и установленном в EV-участок (т.е., IEV-участке), если прогрев каталитического нейтрализатора выхлопного газа двигателя 10 внутреннего сгорания на этом маршруте движения уже был, и существует HV-участок в оставшихся участках движения по маршруту движения. В частности, он конфигурируется, чтобы выполнять управление, чтобы инструктировать двигателю 10 внутреннего сгорания работать в течение точно заданного времени в качестве управления повышением температуры каталитического нейтрализатора.
[0122] Благодаря этому, даже если время или расстояние непрерывного движения в EV-режиме после последовательности участков движения, заданных в качестве EV-участков, становится продолжительнее, температура каталитического нейтрализатора, вынужденного завершать прогрев на HV-участке перед EV-участками, может быть удержана от приведения к падению до температуры активации или менее на EV-участках. По этой причине, представляется возможным сдерживать ухудшение характеристики выхлопа на HV-участке после EV-участков. Дополнительно, если температура каталитического нейтрализатора падает до температуры активации или менее во время EV-участков, необходимо прогревать каталитический нейтрализатор снова на последующем HV-участке, и необходимо прогревать каталитический нейтрализатор множество раз во время одной поездки, но аналогично настоящему варианту осуществления представляется возможным инструктировать двигателю 10 внутреннего сгорания функционировать в течение точно заданного времени во время EV-участков, чтобы поддерживать температуру каталитического нейтрализатора на высокой температуре, чтобы, тем самым, сдерживать увеличение объема расхода топлива вследствие увеличения числа раз прогрева каталитического нейтрализатора. По этой причине, представляется возможным сдерживать до минимальной степени увеличение объема расхода топлива при переключении режимов движения согласно второму плану движения.
[0123] Четвертый вариант осуществления
Далее, четвертый вариант осуществления настоящего изобретения будет объяснен. Настоящий вариант осуществления отличается от третьего варианта осуществления содержимым управления повышением температуры каталитического нейтрализатора. Ниже, будет сделана фокусировка на моментах различия в объяснении.
[0124] Фиг. 10 представляет собой схематичный вид конфигурации транспортного средства 100 и электронного блока 200 управления, управляющего транспортным средством 100 согласно четвертому варианту осуществления настоящего изобретения.
[0125] Как показано на фиг. 10, устройство 15 каталитического нейтрализатора двигателя 10 внутреннего сгорания согласно настоящему варианту осуществления снабжается парой электродов 152 и схемой 153 регулировки напряжения, с тем, чтобы иметь возможность подавать электрическую мощность подложке 151, чтобы нагревать подложку 151.
[0126] Подложка 151 согласно настоящему варианту осуществления, например, формируется посредством карбида кремния (SiC) или дисилицида молибдена (MoSi2) или другого материала, формирующего тепло посредством переноса тока.
[0127] Пара электродов 152 соответственно электрически соединяются с подложкой 151 в электрически изолированном состоянии и соединяются через схему 153 регулировки напряжения с аккумулятором 50. Посредством приложения напряжения через пару электродов 152 к подложке 151 для подачи электрической мощности к подложке 151, ток протекает к подложке 151 так, что подложка 151 формирует тепло, и каталитический нейтрализатор, поддерживаемый на подложке 151, нагревается. Напряжение, приложенное парой электродов 152 к подложке 151, может быть отрегулировано посредством электронного блока 200 управления, управляющего схемой 153 регулировки напряжения. Например, представляется возможным прикладывать напряжение аккумулятора 50, как оно есть, и представляется возможным прикладывать напряжение аккумулятора 50, в то же время понижая его до какого-либо напряжения.
[0128] Фиг. 11 является блок-схемой последовательности операций, объясняющей управление повышением температуры для температуры каталитического нейтрализатора согласно настоящему варианту осуществления. На фиг. 11 содержимое обработки для обработки с этапа S41 по этап S46, в основном, является таким же содержимым, что и в третьем варианте осуществления, таким образом, объяснение будет пропущено здесь.
[0129] На этапе S51 электронный блок 200 управления прикладывает напряжение через пару электродов 152 к подложке 151, чтобы подавать электрическую мощность к подложке 151, и нагревает подложку 151 в течение точно заданного времени, чтобы, тем самым, вызывать повышение температуры каталитического нейтрализатора.
[0130] Даже при конфигурировании электронного блока 200 управления, аналогично настоящему варианту осуществления, объясненному выше, чтобы выполнять, в качестве управления повышением температуры каталитического нейтрализатора, управление для подачи электрической мощности к подложке 151, чтобы нагревать подложку 151 в течение заданного времени, полезные результаты, аналогичные третьему варианту осуществления, могут быть получены.
[0131] Пятый вариант осуществления
Далее, пятый вариант осуществления настоящего изобретения будет объяснен. Настоящий вариант осуществления отличается от вышеописанных вариантов осуществления в том моменте, что часть обработки, которая выполнялась посредством электронного блока 200 управления, выполняется посредством сервера 300. Ниже, будет сделана фокусировка на моментах различия в объяснении.
[0132] Фиг. 12 представляет собой блок-схема, схематично показывающая конфигурацию транспортного средства 100 и устройства управления, управляющего транспортным средством 100 согласно пятому варианту осуществления настоящего изобретения.
[0133] Конфигурация транспортного средства 100 согласно настоящему варианту осуществления является аналогичной первому варианту осуществления, но, как показано на фиг. 11, в настоящем варианте осуществления, устройство управления для управления транспортным средством 100 состоит из электронного блока 200 управления и сервера 300. Электронный блок 200 управления и сервер 300 могут связываться друг с другом по сети 400. Отметим, что сервер 300 может связываться не только с транспортным средством 100, но также с множеством других транспортных средств.
[0134] Сервер 300 снабжается интерфейсом связи, центральным процессором (CPU), памятью, такой как оперативное запоминающее устройство (RAM), накопителем на жестком диске, и т.д. Сервер 300 запускает программу и т.д., сохраненную на накопителе на жестком диске, чтобы подготавливать план движения, который был подготовлен посредством электронного блока 200 управления в первом-четвертом вариантах осуществления, вместо электронного блока 200 управления и передает его электронному блоку 200 управления.
[0135] Подготавливая план движения посредством сервера 300 вместо электронного блока 200 управления, таким образом, представляется возможным уменьшать нагрузку обработки для электронного блока 200 управления и, в свою очередь, представляется возможным уменьшать стоимость производства электронного блока 200 управления.
[0136] Выше были объяснены варианты осуществления настоящего изобретения, но варианты осуществления показывают только некоторые из примеров применения настоящего изобретения и не предназначены, чтобы ограничивать технические рамки настоящего изобретения конкретной конфигурацией вышеописанных вариантов осуществления.
[0137] Например, в вариантах осуществления, в качестве транспортного средства 100, гибридное транспортное средство со штепсельным соединением, сконфигурированное так, что аккумулятор 50 может быть электрически соединен с внешним источником питания, было объяснено в качестве примера, но оно может также быть обычным гибридным транспортным средством.
[0138] Дополнительно, в вышеописанном первом варианте осуществления, на этапе S17 на фиг. 2B, маршруты движения вплоть до отсортированного номера "k" маршрута были установлены в EV-маршруты, на которых все участки движения по маршруту движения заданы EV-участками, маршруты движения от отсортированного номера k+1 маршрута до отсортированного номера "n" маршрута установлены в HV-маршруты, на которых все участки движения по маршруту движения заданы HV-участками, и маршруты движения опять переупорядочиваются в порядке фактических номеров маршрутов, чтобы подготавливать один второй план движения (план движения маршрута).
[0139] Однако, например, следующим образом, также представляется возможным подготавливать множество (число, соответствующее отсортированному числу "k" маршрута) вторых планов движения (планов движения маршрутов) и применять в качестве второго плана движения план, в котором второй суммарный расход TF2 топлива становится наименьшим, и сравнивать результат с первым суммарным расходом TF1 топлива первого плана движения на этапе S20.
[0140] Т.е., если, например, отсортированный номер "k" маршрута, вычисленный на этапе S16, равен 4, сначала, маршрут движения для отсортированного номера 1 маршрута устанавливается в EV-маршрут, на котором все участки движения по маршруту движения заданы EV-участками, маршруты движения от отсортированного номера 2 маршрута до отсортированного номера "n" маршрута устанавливаются в HV-маршруты, на которых все участки движения по маршруту движения заданы HV-участками, и маршруты движения снова переупорядочиваются в порядке фактических номеров маршрутов, чтобы, тем самым, сначала подготавливать первый второй план движения.
[0141] Далее, маршруты движения вплоть до отсортированного номера 2 маршрута устанавливаются в EV-маршруты, на которых все участки движения по маршруту движения заданы EV-участками, маршруты движения от отсортированного номера 3 маршрута до отсортированного номера "n" маршрута устанавливаются в HV-маршруты, на которых все участки движения по маршруту движения заданы HV-участками, и маршруты движения снова переупорядочиваются в порядке фактических номеров маршрутов, чтобы подготавливать второй второй план движения.
[0142] Далее, маршруты движения вплоть до отсортированного номера 3 маршрута устанавливаются в EV-маршруты, на которых все участки движения по маршруту движения заданы EV-участками, маршруты движения от отсортированного номера 4 маршрута устанавливаются в HV-маршруты, на которых все участки движения по маршруту движения заданы HV-участками, и маршруты движения снова переупорядочиваются в порядке фактических номеров маршрутов, чтобы, тем самым, подготавливать третий второй план движения.
[0143] Наконец, маршруты движения вплоть до отсортированного номера "k" (=4) маршрута устанавливаются в EV-маршруты, на которых все участки движения по маршруту движения заданы EV-участками, маршруты движения от отсортированного номера k+1 (=5) маршрута до отсортированного номера "n" маршрута устанавливаются в HV-маршруты, на которых все участки движения по маршруту движения заданы HV-участками, и маршруты движения снова переупорядочиваются в порядке фактических номеров маршрутов, чтобы, тем самым, подготавливать четвертый второй план движения.
[0144] Дополнительно, также представляется возможным соответственно вычислять вторые суммарные расходы TF2 топлива вторых планов движения, подготовленных таким образом, применять план, в котором второй суммарный расход TF2 топлива становится наименьшим среди них, в качестве второго плана движения, и сравнивать его с первым суммарным расходом TF1 топлива первого плана движения на этапе S20.
[0145] Дополнительно, во втором варианте осуществления и третьем варианте осуществления, на этапе S36 на фиг. 5B, маршруты движения до отсортированного номера "k" маршрута были установлены в EV-маршруты, на которых все участки движения по маршруту движения были заданы EV-участками, на участках движения по маршрутам движения от отсортированного номера k+1 маршрута до отсортированного номера "n" маршрута участки движения вплоть до второго отсортированного номера "k" участка были установлены в EV-участки (третий вариант осуществления, IEV-участки), участки движения от второго отсортированного номера k+1 участка до второго отсортированного номера "n" участка были установлены в HV-участки, и участки движения были снова переупорядочены в порядке фактических номеров участков, чтобы, тем самым, подготавливать один второй план движения (план движения с приоритетом маршрута).
[0146] Однако, например, если на этапе S16 отсортированный номер "k" маршрута, удовлетворяющий неравенству (2), равен 2 или более, в обработке с этапа S31 по этап S36, следующим образом, также представляется возможным подготавливать множество (число соответствует отсортированному номеру "k" маршрута) вторых планов движения (планов движения с приоритетом маршрута) и применять в качестве второго плана движения план, в котором второй суммарный расход TF2 топлива становится наименьшим, и сравнивать результат с первым суммарным расходом TF1 топлива первого плана движения на этапе S20.
[0147] Например, как показано на фиг. 13A, когда рассматривается случай, когда существует три маршрута движения (т.е., две промежуточные точки), если выполняется вторая обработка сортировки, чтобы переупорядочивать маршруты движения в порядке повышения от наименьшей потребляемой электрической мощности на маршруте, результат становится таким, как показано на фиг. 13B.
[0148] В это время, например, если отсортированный номер "k" маршрута, удовлетворяющий неравенству (2), вычисленный на этапе S16, равен 2, сначала, тем же образом, что и во втором варианте осуществления и третьем варианте осуществления, как показано на фиг. 13C, маршруты движения вплоть до отсортированного номера "k" маршрута (в примере, показанном на фиг. 13C, k=2) устанавливаются в EV-маршруты, на которых все участки движения по маршруту движения заданы EV-участками. Дополнительно, для участков движения по маршрутам движения от отсортированного номера k+1 маршрута до отсортированного номера "n" маршрута, участки движения вплоть до второго отсортированного номера "k" участка (в примере, показанном на фиг. 13C, k=1), приспособленные для установки в качестве EV-участков с учетом избыточной электрической мощности ΔCE (=CE-RE2) аккумулятора, устанавливаются в EV-участки (в третьем варианте осуществления, IEV-участки), а участки движения от второго отсортированного номера k+1 участка до второго отсортированного номера "n" участка (в примере, показанном на фиг. 13C, n=5) устанавливаются в HV-участки. Дополнительно, как показано на фиг. 13D, участки движения снова переупорядочиваются в порядке фактических номеров участков, и результат устанавливается в качестве первого второго плана движения (плана движения с приоритетом маршрута).
[0149] Далее, в отличие от второго варианта осуществления и третьего варианта осуществления, как показано на фиг. 13E, маршрут движения для отсортированного номера 1 маршрута устанавливается в EV-маршрут, на котором все участки движения заданы EV-участками. Дополнительно, для участков движения по маршрутам движения от отсортированного номера 2 маршрута до отсортированного номера "n" маршрута, участки движения вплоть до второго отсортированного номера "k" участка (в примере, показанном на фиг. 13E, k=4), приспособленные для установки в качестве EV-участков с учетом избыточной электрической мощности ΔCE (=CE-RE1) аккумулятора, устанавливаются в EV-участки (в третьем варианте осуществления, IEV-участки), а участки движения от второго отсортированного номера k+1 участка до второго отсортированного номера "n" участка (в примере, показанном на фиг. 13E, n=8) устанавливаются в HV-участки. Дополнительно, как показано на фиг. 13F, участки движения снова переупорядочиваются в порядке фактических номеров участков, и результат устанавливается в качестве второго плана движения (плана движения с приоритетом маршрута).
[0150] Дополнительно, также представляется возможным соответственно вычислять вторые суммарные расходы TF2 топлива вторых планов движения, подготовленных таким образом, применять план, в котором второй суммарный расход TF2 топлива становится наименьшим среди них, в качестве второго плана движения, и сравнивать его с первым суммарным расходом TF1 топлива первого плана движения на этапе S20.







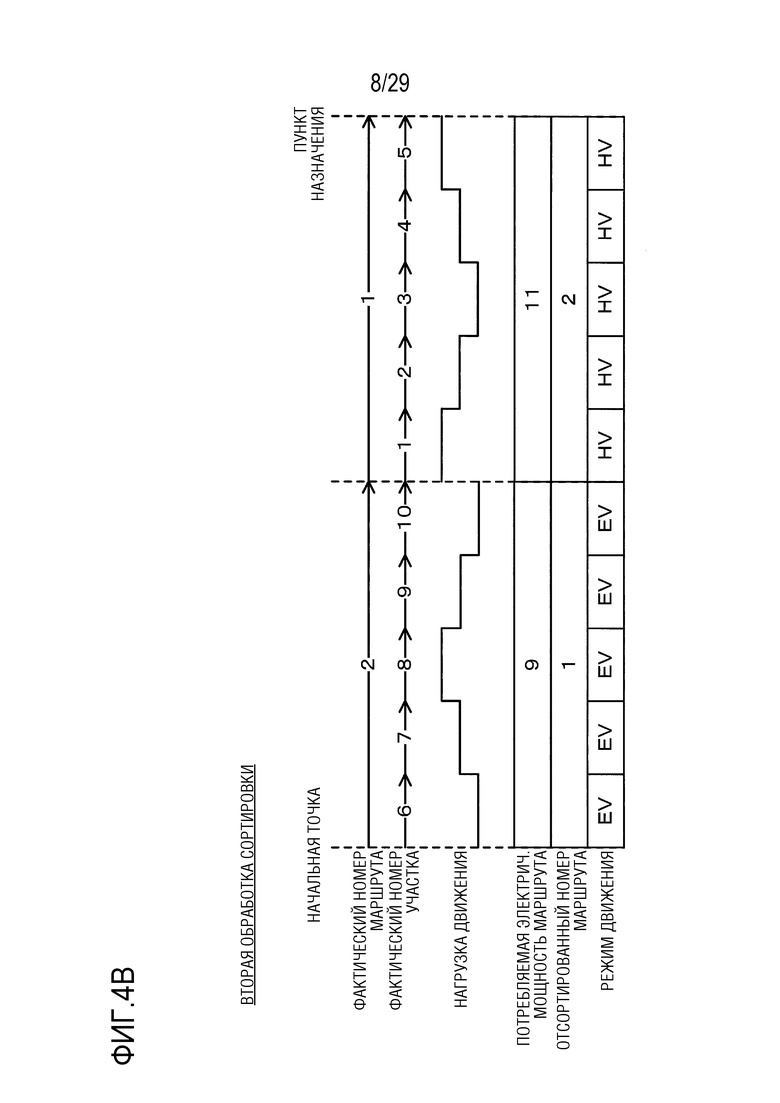



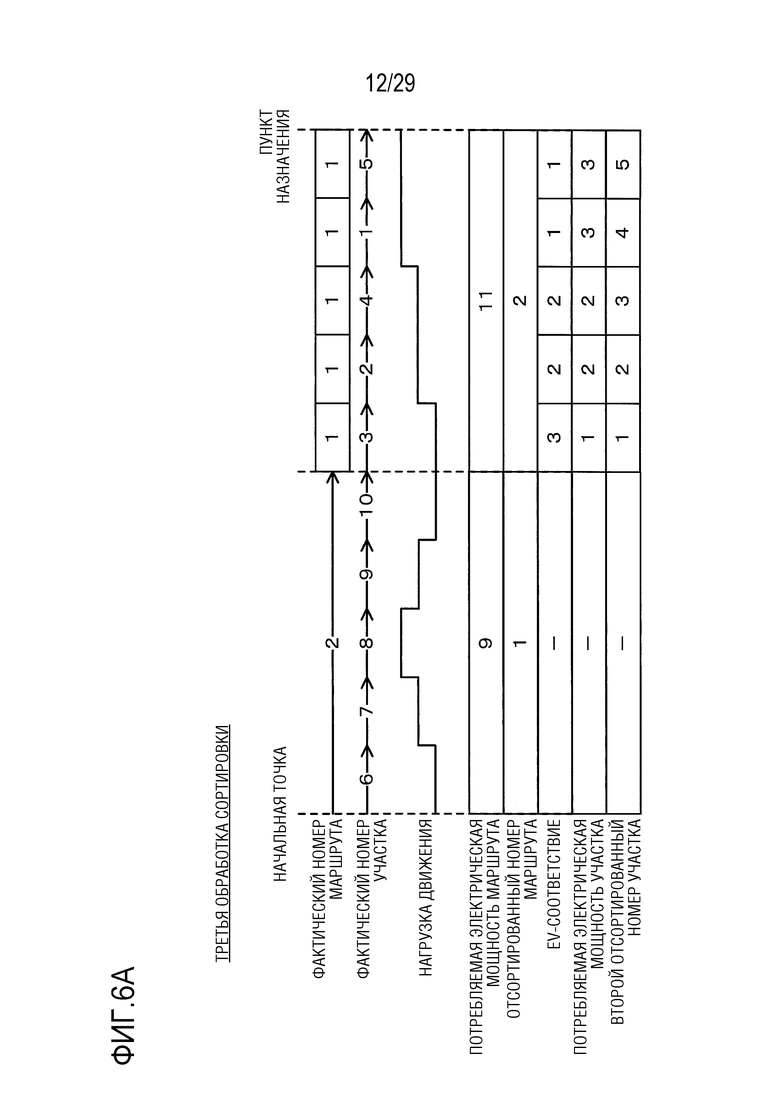
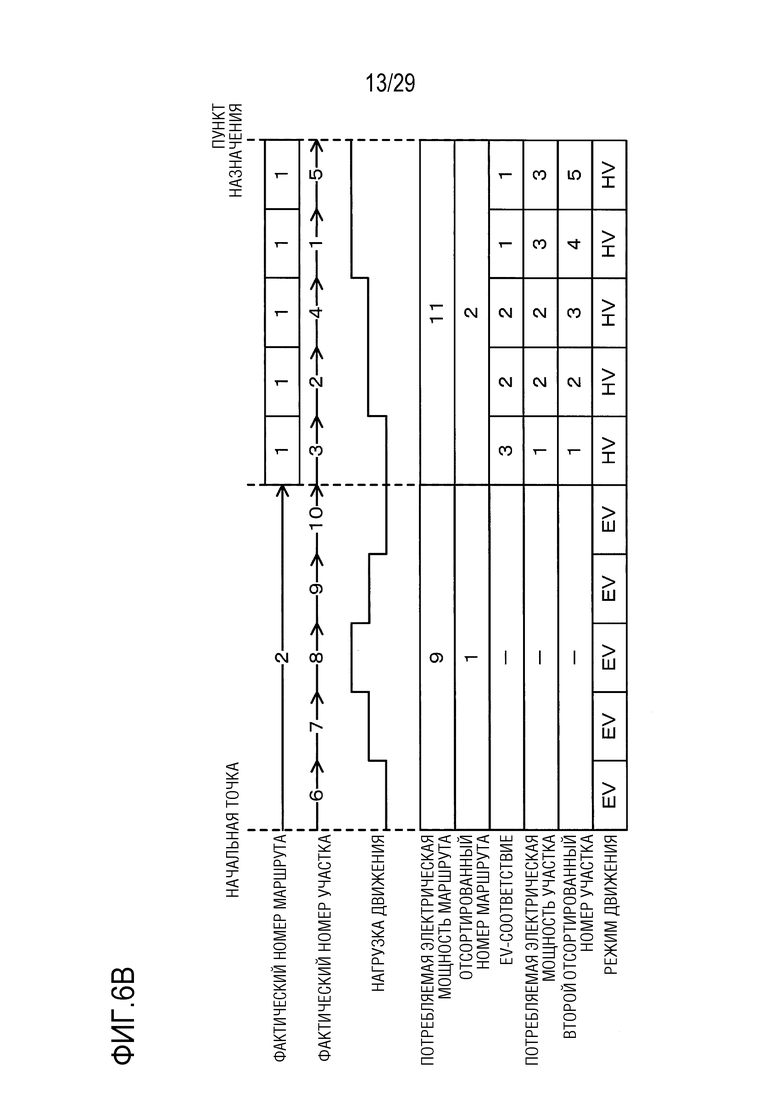

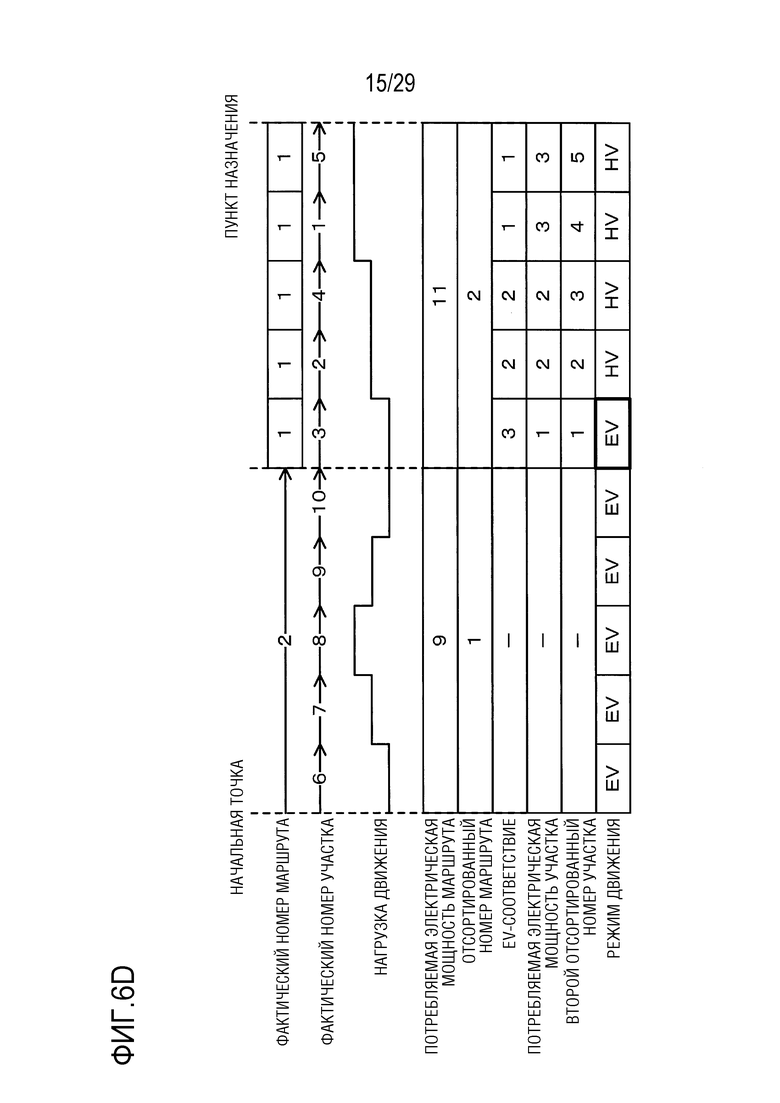

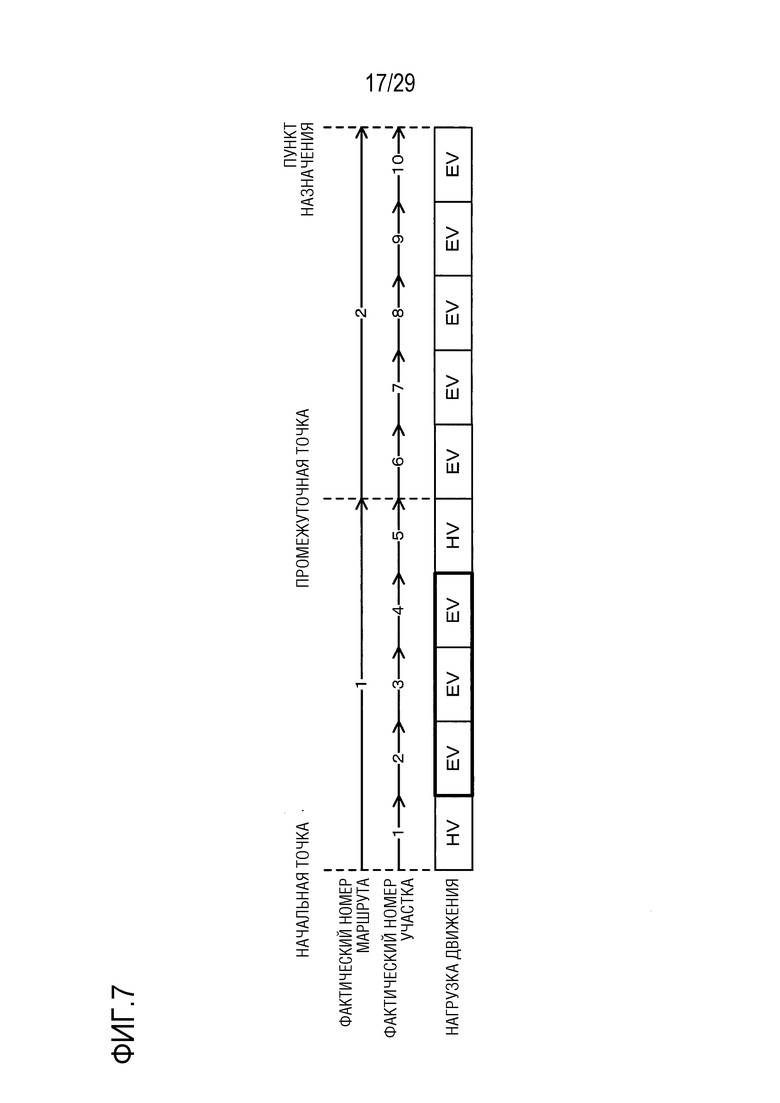
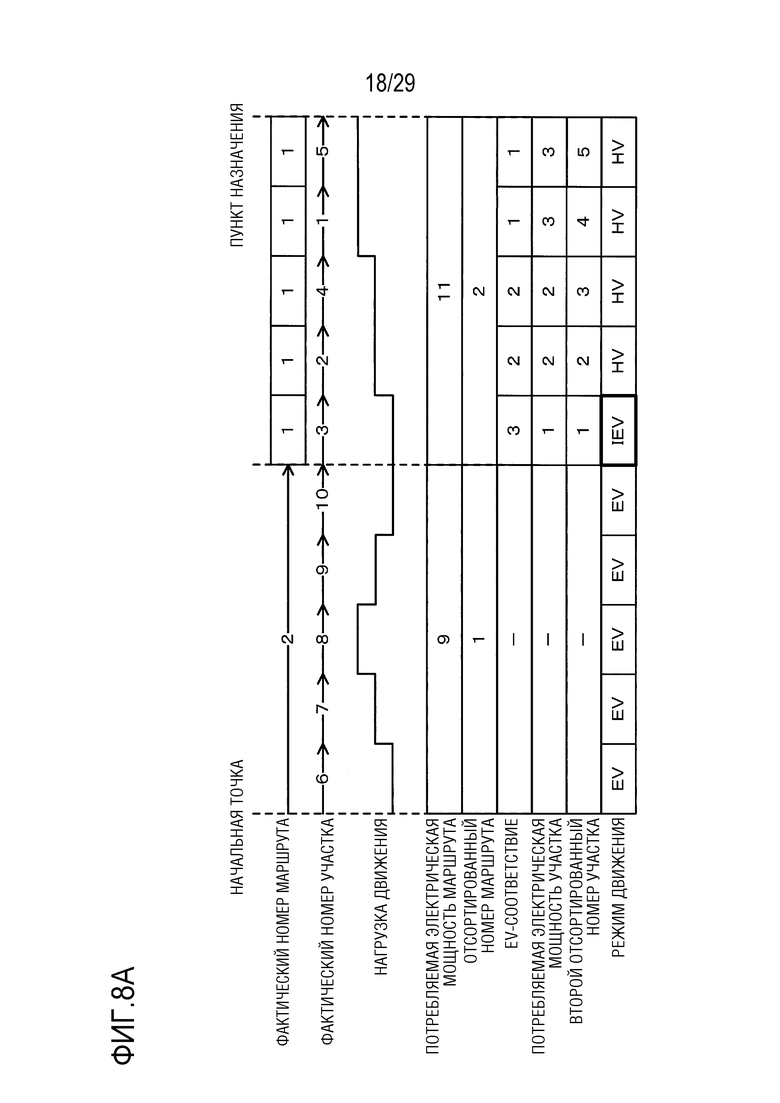
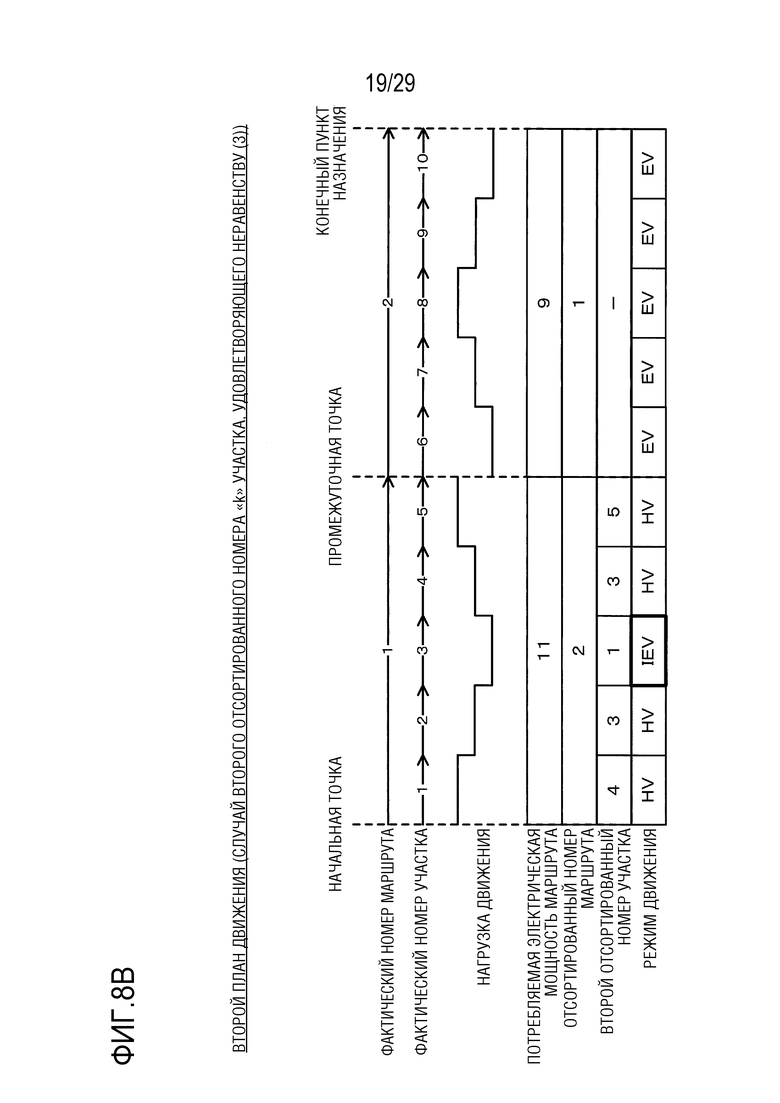




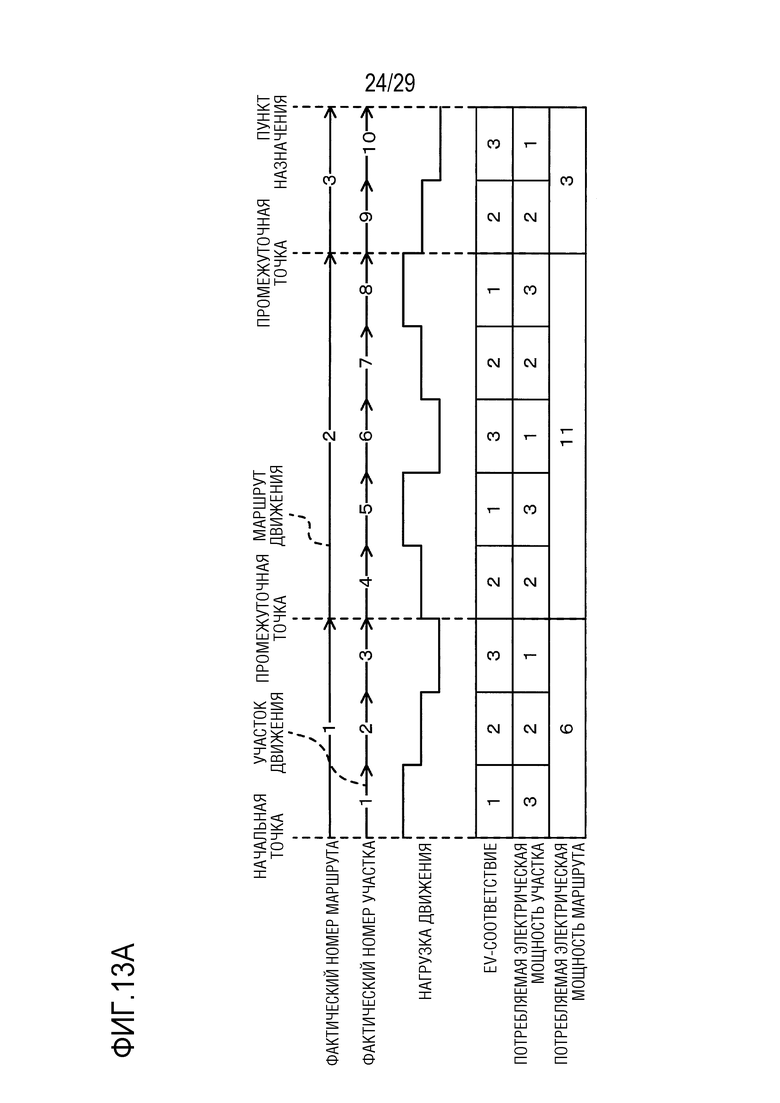





Изобретение относится к гибридным транспортным средствам. Устройство управления режимами движения гибридного транспортного средства содержит часть подготовки плана движения, устанавливающего одну или более промежуточных точек по запланированному маршруту, чтобы делить запланированный маршрут на множество маршрутов движения и делить маршруты движения дополнительно на множества участков движения, и устанавливающего то, в каком режиме движения двигаться по участкам движения из EV-режима или HV-режима. Также имеется часть переключения режима движения в соответствии с планом движения. Часть подготовки плана движения устанавливает режимы движения всех участков движения на одном маршруте движения в EV-режим. Сдерживается число раз прогрева катализатора. 9 з.п. ф-лы, 29 ил.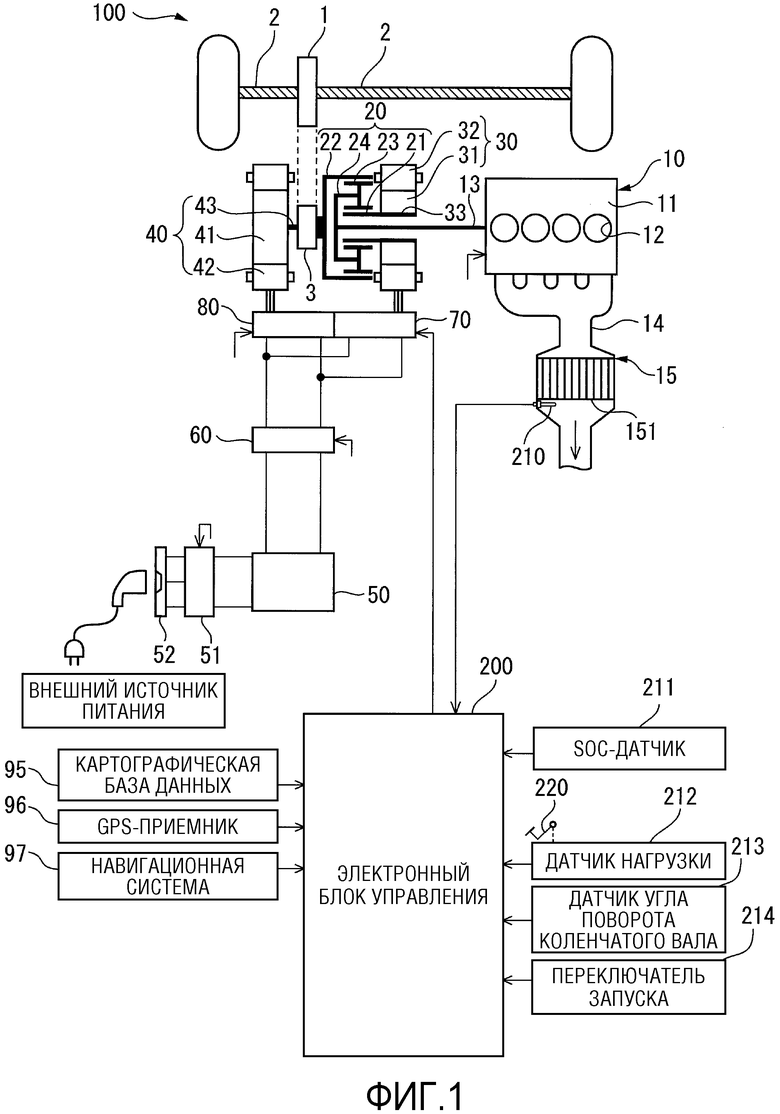
1. Устройство управления режимами движения гибридного транспортного средства, содержащего:
- двигатель внутреннего сгорания;
- аккумулятор, который может заряжаться и разряжаться; и
- вращающуюся электрическую машину, приводимую в действие посредством электрической мощности аккумулятора,
при этом устройство управления содержит:
часть подготовки плана движения, выполненную с возможностью подготовки плана движения, устанавливающего одну или более промежуточных точек по запланированному маршруту от начальной точки до пункта назначения, чтобы делить запланированный маршрут на множество маршрутов движения и делить маршруты движения дополнительно на множества участков движения, и устанавливающего то, в каком режиме движения двигаться по участкам движения из EV-режима для движения с помощью электрической мощности аккумулятора в качестве основного источника мощности или HV-режима для движения с помощью двигателя внутреннего сгорания в качестве основного источника мощности; и
часть переключения режима движения, выполненную с возможностью переключения режимов движения в соответствии с планом движения,
при этом часть подготовки плана движения выполнена с возможностью подготовки плана движения, устанавливающего режимы движения всех участков движения на, по меньшей мере, одном маршруте движения в EV-режим.
2. Устройство управления по п. 1, в котором
часть подготовки плана движения содержит часть вычисления потребляемой электрической мощности маршрута, выполненную с возможностью вычисления потребляемой электрической мощности маршрута, состоящей из расчетного значения электрической мощности, потребляемой при движении по маршрутам движения посредством EV-режима, и
часть подготовки плана движения дополнительно выполнена с возможностью:
подготовки плана движения маршрута,
устанавливающего режимы движения всех участков движения по маршруту движения в EV-режим в порядке повышения от маршрута движения с небольшой потребляемой электрической мощностью маршрута и
устанавливающего режимы движения всех участков движения по маршруту движения в HV-режим от маршрута движения, где сложенное значение потребляемой электрической мощности маршрута, сложенное в порядке повышения от маршрута движения с наименьшей потребляемой электрической мощностью маршрута, превышает пригодную для использования электрическую мощность аккумулятора.
3. Устройство управления по п. 2, в котором часть подготовки плана движения содержит:
часть вычисления соответствия, выполненную с возможностью вычисления соответствий при движении по участкам движения посредством EV-режима; и
часть вычисления потребляемой электрической мощности участка, выполненную с возможностью вычисления потребляемой электрической мощности участка, состоящей из расчетного значения электрической мощности, потребляемой при движении по участкам движения посредством EV-режима,
при этом часть подготовки плана движения дополнительно выполнена с возможностью:
подготовки плана движения участка,
устанавливающего режимы движения в EV-режим в порядке понижения от участка движения с наивысшим соответствием и повышения от наименьшей потребляемой электрической мощности участка и
устанавливающего режимы движения в HV-режим от участка движения, где сложенное значение потребляемой электрической мощности участка, сложенное в порядке понижения от участка движения с наивысшим соответствием и повышения от наименьшей потребляемой электрической мощности участка, превышает пригодную для использования электрическую мощность аккумулятора,
причем часть переключения режима движения выполнена с возможностью переключения режимов движения в соответствии с планом движения маршрута, когда объем первого суммарного расхода топлива, состоящий из суммы объемов топлива, расходуемого на маршрутах движения, на которых существуют участки движения, установленные в HV-режим в плане движения участка, больше объема второго суммарного расхода топлива, состоящего из суммы объемов топлива, расходуемого на маршрутах движения, на которых все участки движения установлены в HV-режим в плане движения маршрута.
4. Устройство управления по п. 1, в котором часть подготовки плана движения содержит:
часть вычисления соответствия, выполненную с возможностью вычисления соответствий при движении по участкам движения посредством EV-режима;
часть вычисления потребляемой электрической мощности участка, выполненную с возможностью вычисления потребляемой электрической мощности участка, состоящей из расчетного значения электрической мощности, потребляемой при движении по участкам движения посредством EV-режима; и
часть вычисления потребляемой электрической мощности маршрута, выполненную с возможностью вычисления потребляемой электрической мощности маршрута, состоящей из расчетного значения электрической мощности, потребляемой при движении по маршрутам движения посредством EV-режима,
причем часть подготовки плана движения выполнена с возможностью:
подготовки плана движения с приоритетом маршрута,
устанавливающего маршруты движения вплоть до момента, когда первое сложенное значение, полученное сложением потребляемой электрической мощности маршрута в порядке повышения от маршрута движения с наименьшей потребляемой электрической мощностью маршрута, превышает пригодную для использования электрическую мощность аккумулятора, в EV-маршруты, на которых режимы движения всех участков движения на этом маршруте движения заданы EV-режимом в порядке повышения от маршрута движения с наименьшей потребляемой электрической мощностью маршрута,
устанавливающего участки движения маршрутов движения, на которых первое сложенное значение превышает пригодную для использования электрическую мощность аккумулятора, вплоть до момента, когда второе суммарное значение, полученное сложением потребляемой электрической мощности участка в порядке понижения от участка движения с наивысшим соответствием и повышения от наименьшей потребляемой электрической мощности участка на этом маршруте движения, превышает избыточную электрическую мощность аккумулятора, состоящую из пригодной для использования электрической мощности аккумулятора минус суммарное значение потребляемой электрической мощности маршрута для EV-маршрута, в EV-режим и
устанавливающего режим движения в HV-режим от участка движения, на котором второе сложенное значение превышает избыточную электрическую мощность аккумулятора.
5. Устройство управления по п. 4, в котором часть подготовки плана движения выполнена с возможностью
подготовки плана движения участка,
устанавливающего режимы движения в EV-режим в порядке понижения от участка движения с наивысшим соответствием и повышения от наименьшей потребляемой электрической мощности участка и
устанавливающего режимы движения в HV-режим от участка движения, на котором третье сложенное значение, полученное сложением потребляемой электрической мощности участка в порядке понижения от участка движения с наивысшим соответствием и наименьшей потребляемой электрической мощностью участка, превышает пригодную для использования электрическую мощность аккумулятора,
причем часть переключения режима движения выполнена с возможностью переключения режимов движения в соответствии с планом движения с приоритетом маршрута, когда объем первого суммарного расхода топлива, состоящий из суммы объемов топлива, расходуемого на маршрутах движения, на которых существуют участки движения, установленные в HV-режим в плане движения участка, больше объема второго суммарного расхода топлива, состоящего из суммы объемов топлива, расходуемого на маршрутах движения, на которых существуют участки движения, установленные в HV-режим в плане движения с приоритетом маршрута.
6. Устройство управления по п. 3 или 5, в котором объем первого суммарного расхода топлива и объем второго суммарного расхода топлива являются, соответственно, суммами объема топлива, расходуемого для движения, и объема топлива, расходуемого для прогрева каталитического нейтрализатора для очистки выхлопного газа двигателя внутреннего сгорания.
7. Устройство управления по п. 1, в котором промежуточная точка является конечной точкой одной поездки гибридного транспортного средства.
8. Устройство управления по п. 4 или 5, дополнительно содержащее часть управления повышением температуры каталитического нейтрализатора, выполненную с возможностью выполнения управления повышением температуры каталитического нейтрализатора, вызывающего повышение температуры каталитического нейтрализатора для очистки выхлопного газа, когда температура каталитического нейтрализатора для очистки выхлопного газа становится меньше заданной опорной температуры для повышения температуры, более высокой, чем температура активации, когда функция очистки выхлопного газа каталитического нейтрализатора для очистки выхлопного газа активируется, в случае переключения режимов движения в соответствии с планом движения с приоритетом маршрута при движении по участку движения по маршруту движения, отличному от EV-маршрута, и установленному в EV-участок, проезжаемый посредством EV-режима, если прогрев каталитического нейтрализатора для очистки выхлопного газа двигателя внутреннего сгорания уже был на этом маршруте движения, и существует HV-участок, проезжаемый посредством HV-режима, в оставшихся участках движения по маршруту движения.
9. Устройство управления по п. 8, в котором управление повышением температуры каталитического нейтрализатора является управлением для инструктирования двигателю внутреннего сгорания работать в течение точно заданного времени при движении по участку движения по маршруту движения, отличному от EV-маршрута и установленному в EV-участок.
10. Устройство управления по п. 8, в котором управление повышением температуры каталитического нейтрализатора является управлением для подачи электрической мощности подложке, несущей каталитический нейтрализатор очистки выхлопного газа на поверхности, для нагрева подложки в течение точно заданного времени при движении по участку движения по маршруту движения, отличному от EV-маршрута и установленному в EV-участок.
| JP 2014162261 A, 08.09.2014 | |||
| JP 2004056867 A, 19.02.2004 | |||
| JP 2010120552 A, 06.06.2010 | |||
| US 20170267227 A1, 21.09.2017 | |||
| WO 2017102323 A1, 22.06.2017. |

