Область техники
[0001] Настоящее изобретение относится к энергонезависимому носителю данных, устройству управления транспортным средством и способу генерирования структуры данных.
Уровень техники
[0002] В публикации нерассмотренной заявки на патент Японии № 2003-269208 (JP 2003-269208 A) описано устройство управления для гибридного транспортного средства (HV). В устройстве управления, когда величина заряда аккумулятора является равной или меньше заданной нижней предельной величины заряда, запускается двигатель внутреннего сгорания, чтобы заряжать аккумулятор. Чтобы запускать двигатель внутреннего сгорания после предварительного прогрева устройства каталитического нейтрализатора, устройство каталитического нейтрализатора нагревается (предварительно нагревается) посредством нагревателя или т.п., когда величина заряда аккумулятора является равной или меньше заданной величины заряда для начала прогрева, которая больше нижней предельной величины заряда.
Сущность изобретения
[0003] Во время предварительного нагрева, в котором устройство каталитического нейтрализатора электрически нагревается, движущая энергия, чтобы вынуждать транспортное средство двигаться посредством приведения в действие тягового мотора, является необходимой в дополнение к энергии, подаваемой к устройству каталитического нейтрализатора. Чтобы надлежащим образом задавать величину заряда для начала прогрева, необходимо точно прогнозировать величину движущей энергии, которая необходима во время предварительного нагрева.
[0004] Существует проблема, что величину движущей энергии, которая необходима во время предварительного нагрева, трудно прогнозировать, поскольку нагрузка от движения изменяется по-разному в зависимости, например, от маршрута движения или условий дорожного движения во время предварительного нагрева. То есть, существует проблема, что величину движущей энергии, которая необходима для движения во время некоторого периода в будущем, трудно прогнозировать, поскольку нагрузка движения изменяется по-разному в зависимости, например, от маршрута движения или условий дорожного движения в этом периоде.
[0005] Настоящее изобретение было создано, принимая во внимание проблему, описанную выше, и его целью является предоставление структуры данных, необходимой, чтобы точно прогнозировать величину движущей энергии (величину нагрузки движения), которая необходима в будущем.
[0006] Первый аспект настоящего изобретения относится к энергонезависимому носителю данных для использования в устройстве обработки информации в системе управления транспортным средством, носитель данных хранит: части позиционной информации; части информации о совокупном относительном частотном распределении, ассоциированной с отдельными направлениями движения транспортного средства, части информации о совокупном относительном частотном распределении относятся к данным о нагрузках движения в точках, указанных посредством частей позиционной информации по множеству транспортных средств, проехавших через точки, или данным о величинах нагрузки движения в зависимости от времени движения или расстояния движения от точек; и инструкции, которые являются исполняемыми посредством одного или более процессоров, и которые инструктируют одному или более процессорам выполнять функции, содержащие вычисление прогнозируемого значения величины нагрузки движения в зависимости от времени движения или расстояния движения от произвольной точки на основе информации о совокупном относительном частотном распределении, ассоциированной с отдельными направлениями движения транспортного средства в произвольной точке.
[0007] Второй аспект настоящего изобретения относится к устройству управления транспортным средством, включающему в себя электронный блок управления, электронный блок управления конфигурируется, чтобы управлять транспортным средством в системе управления транспортным средством на основе спрогнозированного значения величины нагрузки движения, которое вычисляется с помощью структуры данных, структура данных используется устройством обработки информации в системе управления транспортным средством, структура данных включает в себя: части позиционной информации; и части информации о совокупном относительном частотном распределении, ассоциированной с отдельными направлениями движения транспортного средства, части информации о совокупном относительном частотном распределении относятся к данным о нагрузках движения в точках, указанных посредством частей позиционной информации по множеству транспортных средств, проехавших через точки, или данным о величинах нагрузки движения в зависимости от времени движения или расстояния движения от точек, устройство обработки информации конфигурируется, чтобы вычислять, с помощью структур данных, прогнозируемое значение величины нагрузки движения в зависимости от времени движения или расстояния движения от произвольной точки на основе информации о совокупном относительном частотном распределении, ассоциированной с отдельными направлениями движения транспортного средства в произвольной точке.
[0008] Третий аспект настоящего изобретения относится к способу генерирования структуры данных посредством устройства обработки информации в системе управления транспортным средством, способ включает в себя: получение данных временного ряда для частей позиционной информации и нагрузок движения в отдельных точках, где транспортные средства проехали; вычисление, на основе данных временного ряда, направлений движения транспортных средств, от которых данные временного ряда получены, и величин нагрузки движения для транспортных средств в зависимости от времени движения или расстояния движения от отдельных точек, где части позиционной информации получены; накопление, в ассоциации с отдельными точками и отдельными направлениями движения, данных о вычисленных величинах нагрузки движения в зависимости от времени движения или расстояния движения от отдельных точек; и создание, в ассоциации с отдельными точками и отдельными направлениями движения, совокупных относительных частотных распределений величины нагрузки движения в зависимости от времени движения или расстояния движения от отдельных точек на основе данных о величинах нагрузки движения, которые накоплены в ассоциации с отдельными точками и отдельными направлениями движения.
[0009] С помощью аспектов настоящего изобретения является возможным точно прогнозировать величину движущей энергии (величину нагрузки движения) транспортного средства, которая должна быть необходимой в будущем.
Краткое описание чертежей
[0010] Признаки, преимущества и техническое и промышленное значение примерных вариантов осуществления изобретения будут описаны ниже со ссылкой на прилагаемые чертежи, на которых одинаковыми ссылочными позициями обозначены аналогичные элементы, и на которых:
Фиг. 1 - схематичный чертеж, иллюстрирующий общую конфигурацию системы управления транспортным средством;
Фиг. 2 - схема, иллюстрирующая подробные конфигурации аппаратных средств транспортного средства водителя и сервера в системе управления транспортного средства;
Фиг. 3 - схема, иллюстрирующая соотношение между величиной заряда аккумулятора и нагрузкой переключения;
Фиг. 4 - схема, содержащая стрелки "a" по "d", указывающие примеры предыдущих показательных записей о движении, показывающих, что транспортное средство, проехавшее некую точку A, за перекрестком движется в течение времени T предварительного нагрева от точки A;
Фиг. 5 - схема, иллюстрирующая величины Ep движущей энергии для времени предварительного нагрева от точки A, которые сравниваются между записями о движении;
Фиг. 6A - схема, иллюстрирующая частотное распределение данных о величинах Ep движущей энергии для времени предварительного нагрева от точки A;
Фиг. 6B - схема, иллюстрирующая совокупное относительное частотное распределение данных о величинах Ep движущей энергии для времени предварительного нагрева от точки A;
Фиг. 7 - блок-схема последовательности операций, иллюстрирующая процесс генерирования структуры данных согласно первому варианту осуществления настоящего изобретения;
Фиг. 8A - схема, иллюстрирующая пример способа для вычисления величины движущей энергии для времени предварительного нагрева от некоторой точки;
Фиг. 8B - схема, иллюстрирующая пример способа для вычисления величины движущей энергии для времени предварительного нагрева от некоторой точки;
Фиг. 9 - блок-схема последовательности операций, иллюстрирующая управление прогревом каталитического нейтрализатора, которое должно быть выполнено в каждом транспортном средстве согласно первому варианту осуществления настоящего изобретения;
Фиг. 10 - блок-схема последовательности операций, иллюстрирующая подробности процесса установки величины заряда для начала прогрева согласно первому варианту осуществления настоящего изобретения;
Фиг. 11 - схема для описания того, что временное запаздывание возникает вследствие задержки связи от передачи сигнала запроса до приема спрогнозированной величины движущей энергии;
Фиг. 12 - схема, иллюстрирующая линейную интерполяцию;
Фиг. 13 - блок-схема последовательности операций, иллюстрирующая подробности процесса установки величины заряда для начала прогрева согласно второму варианту осуществления настоящего изобретения;
Фиг. 14 - схема, иллюстрирующая зону низкой точности прогнозирования;
Фиг. 15 - блок-схема последовательности операций, иллюстрирующая процесс генерирования структуры данных согласно третьему варианту осуществления настоящего изобретения; и
Фиг. 16 - блок-схема последовательности операций, иллюстрирующая подробности процесса установки величины заряда для начала прогрева согласно третьему варианту осуществления настоящего изобретения.
Подробное описание вариантов осуществления изобретения
[0011] Варианты осуществления настоящего изобретения описываются подробно ниже со ссылками на чертежи. В последующем описании одинаковые компоненты обозначены посредством одинаковых ссылочных позиций.
Первый вариант осуществления
[0012] Фиг. 1 является схематичным чертежом, иллюстрирующим общую конфигурацию системы 1 управления транспортного средства согласно первому варианту осуществления настоящего изобретения.
[0013] Система 1 управления транспортным средством включает в себя множество транспортных средств 2 и сервер 3.
[0014] Каждое транспортное средство 2 имеет возможность связи с сервером 3 посредством беспроводной связи. В этом варианте осуществления каждое транспортное средство 2 передает информацию записи о движении для транспортного средства 2 серверу 3 в заданный момент времени. Информация записи о движении является данными временного ряда для частей позиционной информации и нагрузок движения в точках, через которые транспортное средство 2 проехало.
[0015] Сервер 3 может накапливать и компилировать информацию записи о движении, принятую от каждого транспортного средства 2. В ответ на запрос от транспортного средства 2 сервер 3 передает, транспортному средству 2, информацию, полученную из данных, скомпилированных на сервере 3.
[0016] Таким образом, система 1 управления транспортным средством конфигурируется так, что каждое транспортное средство 2 может предоставлять информацию записи о движении транспортного средства 2 серверу 3 и использовать информацию, полученную из данных, полученных посредством компиляции информации записи о движении на сервере 3.
[0017] В последующем описании транспортное средство 2, которое выполняет управление движением и т.п., описанные позже согласно этому варианту осуществления, называется "транспортным средством 2a водителя" при необходимости, а транспортное средство 2, отличное от транспортного средства 2a водителя, называется "другим транспортным средством 2b" при необходимости. В этом варианте осуществления транспортное средство 2a водителя является гибридным транспортным средством или гибридным транспортным средством со штепсельным соединением. Тип другого транспортного средства 2b особо не ограничивается. Примеры другого транспортного средства 2b включают в себя гибридное транспортное средство и гибридное транспортное средство со штепсельным соединением аналогично транспортному средству 2a водителя, электрические транспортные средства (такие как аккумуляторное электрическое транспортное средство и транспортное средство на топливных элементах), отличные от транспортного средства 2a водителя, и транспортное средство, имеющее только двигатель внутреннего сгорания в качестве источника движущей мощности.
[0018] Фиг. 2 является схемой, иллюстрирующей подробные конфигурации аппаратных средств транспортного средства 2a водителя и сервера 3 в системе 1 управления транспортным средством.
[0019] Транспортное средство 2a водителя является гибридным транспортным средством, включающим в себя двигатель 10 внутреннего сгорания, устройство 20 распределения мощности, первую ротационную электрическую машину 30, вторую ротационную электрическую машину 40, аккумулятор 50, повышающий преобразователь 60, первый инвертор 70, второй инвертор 80, устройство 90 связи на стороне транспортного средства и электронный блок 200 управления. Транспортное средство 2a водителя может передавать движущую мощность одного или обоих из двигателя 10 внутреннего сгорания и второй ротационной электрической машины 40 валам 17 привода колес через конечный редуктор 16 скорости. В дополнение к двигателю 10 внутреннего сгорания и другим компонентам транспортное средство 2a водителя включает в себя картографическую базу данных 95, приемник 96 системы глобального позиционирования (GPS) и навигатор 97.
[0020] Двигатель 10 внутреннего сгорания формирует движущую мощность для вращения выходного вала 13 посредством сжигания топлива в цилиндрах 12, сформированных в корпусе 11 двигателя. Отработавший газ, выпущенный из цилиндров 12 в выхлопной канал 14, выпускается в атмосферу через выхлопной канал 14. Выхлопной канал 14 снабжается электрически нагреваемым устройством 15 каталитического нейтрализатора, сконфигурированным, чтобы удалять токсичные вещества в отработавшем газе.
[0021] Электрически нагреваемое устройство 15 каталитического нейтрализатора включает в себя токопроводящую подложку 151, пару электродов 152, схему 153 регулирования напряжения, датчик 154 напряжения и датчик 155 тока.
[0022] Токопроводящая подложка 151 выполняется из такого материала как карбид кремния (SiC) или дисилицид молибдена (MoSi2), который формирует тепло посредством питания энергией. Токопроводящая подложка 151 имеет множество каналов (далее в данном документе называемых "отдельными ячейками"), имеющих форму сечения в виде сетки (или сот) в направлении протекания отработавшего газа. Каталитический нейтрализатор поддерживается на поверхностях отдельных ячеек. Каталитический нейтрализатор, который должен поддерживаться на токопроводящей подложке 151, особо не ограничивается. Каталитический нейтрализатор, необходимый, чтобы получать желаемую характеристику регулирования отработавшего газа, может быть выбран среди различных каталитических нейтрализаторов при необходимости и поддерживается на токопроводящей подложке 151.
[0023] Электроды 152 прикладывают напряжение к токопроводящей подложке 151. Электроды 152 электрически соединяются с токопроводящей подложкой 151 и соединяются с аккумулятором 50 через схему 153 регулирования напряжения. Посредством приложения напряжения к токопроводящей подложке 151 через электроды 152, ток протекает через токопроводящую подложку 151, чтобы формировать тепло в токопроводящей подложке 151, тем самым, нагревая каталитический нейтрализатор, поддерживаемый на токопроводящей подложке 151.
[0024] Напряжение Vh [В], которое должно быть приложено к токопроводящей подложке 151 через электроды 152 (далее в данном документе называемое "прикладываемым к подложке напряжением") может быть отрегулировано посредством управления схемой 153 регулирования напряжения электронным блоком 200 управления. Например, напряжение аккумулятора 50 может быть приложено как есть или быть пошагово увеличено или уменьшено до произвольного напряжения. В этом варианте осуществления электрическая мощность Ph [кВт], которая должна быть приложена к токопроводящей подложке 151 (далее в данном документе называемая "подаваемой к подложке мощностью") может быть отрегулирована до произвольной электрической мощности посредством управления схемой 153 регулирования напряжения электронным блоком 200 управления.
[0025] Датчик 154 напряжения обнаруживает прикладываемое к подложке напряжение Vh. В этом варианте осуществления схема 153 регулирования напряжения управляется на основе прикладываемого к подложке напряжения Vh, обнаруженного посредством датчика 154 напряжения, так что прикладываемое к подложке напряжение Vh достигает заданного номинального напряжения Vmax.
[0026] Датчик 155 тока обнаруживает ток Ih [А], протекающий через токопроводящую подложку 151, когда напряжение прикладывается к токопроводящей подложке 151.
[0027] Устройство 20 распределения мощности является планетарной зубчатой передачей, сконфигурированной, чтобы распределять мощность, выводимую от двигателя 10 внутреннего сгорания, на два компонента мощности, т.е., приводящую мощность для вращения валов 17 привода колес и приводящую мощность для рекуперативного привода первой ротационной электрической машины 30. Устройство 20 распределения мощности включает в себя солнечное зубчатое колесо 21, коронное зубчатое колесо 22, сателлиты 23 и водило 24 планетарной передачи.
[0028] Солнечное зубчатое колесо 21 является внешним зубчатым колесом, размещенным в центре устройства 20 распределения мощности. Солнечное зубчатое колесо 21 соединяется с валом 33 вращения первой ротационной электрической машины 30.
[0029] Коронное зубчатое колесо 22 является внутренним зубчатым колесом, размещенным вокруг солнечного зубчатого колеса 21 концентрически с солнечным зубчатым колесом 21. Коронное зубчатое колесо 22 соединяется с валом 43 вращения второй ротационной электрической машины 40. Ведущее зубчатое колесо 18 целиком присоединяется к коронному зубчатому колесу 22, чтобы передавать вращение коронного зубчатого колеса 22 валам 17 привода колес через конечный редуктор 16 скорости.
[0030] Сателлиты 23 являются множеством внешних зубчатых колес, размещенных между солнечным зубчатым колесом 21 и коронным зубчатым колесом 22 с тем, чтобы зацепляться с солнечным зубчатым колесом 21 и коронным зубчатым колесом 22.
[0031] Водило 24 планетарной передачи соединяется с выходным валом 13 двигателя 10 внутреннего сгорания и вращается вокруг выходного вала 13. Водило 24 планетарной передачи также присоединяется к сателлитам 23, так что сателлиты 23 могут вращаться вокруг своих осей, а также вращаться (обращаться) вокруг солнечного зубчатого колеса 21, когда водило 24 планетарной передачи вращается.
[0032] Например, первая ротационная электрическая машина 30 является синхронным мотор-генератором трехфазного переменного тока (AC), включающим в себя ротор 31 и статор 32. Ротор 31 присоединяется к внешней окружности вращающегося вала 33, присоединенного к солнечному зубчатому колесу 21, и множество постоянных магнитов являются встроенными во внешнюю окружность ротора 31. Катушки возбуждения наматываются вокруг статора 32, чтобы генерировать вращающее магнитное поле. Первая ротационная электрическая машина 30 функционирует как мотор, сконфигурированный, чтобы выполнять движение от мощности, снабжаясь электрической мощностью от аккумулятора 50, и как генератор, сконфигурированный, чтобы выполнять рекуперативное движение, принимая движущую мощность от двигателя 10 внутреннего сгорания.
[0033] В этом варианте осуществления первая ротационная электрическая машина 30, главным образом, используется в качестве генератора. Чтобы проворачивать коленчатый вал двигателя 10 внутреннего сгорания посредством вращения выходного вала 13, первая ротационная электрическая машина 30 используется в качестве мотора, чтобы функционировать в качестве стартера.
[0034] Например, вторая ротационная электрическая машина 40 (тяговый мотор) является трехфазным AC-синхронным мотор-генератором, включающим в себя ротор 41 и статор 42. Ротор 41 присоединяется к внешней окружности вращающегося вала 43, присоединенного к коронному зубчатому колесу 22, и множество постоянных магнитов являются встроенными во внешнюю окружность ротора 41. Катушки возбуждения наматываются вокруг статора 42, чтобы генерировать вращающее магнитное поле. Вторая ротационная электрическая машина 40 функционирует как мотор, сконфигурированный, чтобы выполнять движение от мощности, снабжаясь электрической мощностью от аккумулятора 50, и как генератор, сконфигурированный, чтобы выполнять рекуперативный привод, принимая движущую мощность от валов 17 привода колес во время, например, замедления транспортного средства.
[0035] Аккумулятор 50 является заряжаемой и разряжаемой аккумуляторной батареей, такой как никель-кадмиевая батарея, никель-металл-гидридная батарея или литиево-ионная батарея. В этом варианте осуществления литиево-ионная батарея, имеющая номинальное напряжение около 200 В, используется в качестве аккумуляторной батареи 50. Аккумулятор 50 электрически соединяется с первой ротационной электрической машиной 30 и второй ротационной электрической машиной 40, например, через повышающий преобразователь 60, так что первая ротационная электрическая машина 30 и вторая ротационная электрическая машина 40 могут выполнять движение от мощности, снабжаясь заряженной мощностью аккумулятора 50, и что аккумулятор 50 может быть заряжен электрической мощностью, генерируемой посредством первой ротационной электрической машины 30 и второй ротационной электрической машины 40.
[0036] В этом варианте осуществления аккумулятор 50 является электрически соединяемым с внешним источником питания, таким как настенная розетка дома, через схему 51 управления зарядкой и зарядную крышку 52, так что аккумулятор 50 может быть заряжен от внешнего источника питания. Схема 51 управления зарядкой является электрической схемой, сконфигурированной, чтобы, на основе управляющего сигнала от электронного блока 200 управления, заряжать аккумулятор 50 электрической мощностью от внешнего источника питания посредством преобразования переменного тока, подаваемого от внешнего источника питания, в постоянный ток (DC) и повышения входного напряжения до напряжения аккумулятора.
[0037] Повышающий преобразователь 60 включает в себя электрическую схему, сконфигурированную, чтобы, на основе управляющего сигнала от электронного блока 200 управления, повышать напряжение между клеммами на первичной клемме и выводить напряжение со вторичной клеммы, и сконфигурированную, чтобы, на основе управляющего сигнала от электронного блока 200 управления, понижать напряжение между клеммами на вторичной клемме и выводить напряжение с первичной клеммы. Первичная клемма повышающего преобразователя 60 соединяется с выходной клеммой аккумулятора 50. Вторичная клемма повышающего преобразователя 60 соединяется с DC-клеммами первого инвертора 70 и второго инвертора 80.
[0038] Каждый из первого инвертора 70 и второго инвертора 80 включает в себя электрическую схему, сконфигурированную, чтобы, на основе управляющего сигнала от электронного блока 200 управления, преобразовывать постоянный ток, вводимый с DC-клеммы, в переменный ток (в этом варианте осуществления трехфазный переменный ток) и выводить переменный ток с AC-клеммы, и сконфигурированную, чтобы, на основе управляющего сигнала от электронного блока 200 управления, преобразовывать переменный ток, вводимый с AC-клеммы, в постоянный ток и выводить постоянный ток с DC-клеммы. DC-клемма первого инвертора 70 соединяется со вторичной клеммой повышающего преобразователя 60. AC-клемма первого инвертора 70 соединяется с входной/выходной клеммой первой ротационной электрической машины 30. DC-клемма второго инвертора 80 соединяется со вторичной клеммой повышающего преобразователя 60. AC-клемма второго инвертора 80 соединяется с входной/выходной клеммой второй ротационной электрической машины 40.
[0039] Устройство 90 связи на стороне транспортного средства имеет возможность связи с устройством 301 связи на стороне сервера для сервера 3 посредством беспроводной связи. Устройство 90 связи на стороне транспортного средства передает, серверу 3, информацию записи о движении транспортного средства 2a водителя, которая передается от электронного блока 200 управления, и передает, электронному блоку 200 управления, различные типы информации, принятой от сервера 3.
[0040] Картографическая база данных 95 является базой данных, связанной с картографической информацией. Например, картографическая база данных 95 хранится на накопителе на жестком диске (HDD), установленном в транспортном средстве 2a водителя. Картографическая информация содержит различные типы дорожной информации, такой как позиционная информация для дорог, информация о форме дороги (например, уклоны, типы изгиба и прямую часть и кривизны изгибов), позиционная информация для перекрестков и развязок, типы дороги и ограничения скорости транспортного средства.
[0041] GPS-приемник 96 принимает сигналы от трех или более GPS-спутников, чтобы идентифицировать широту и долготу транспортного средства 2a водителя, тем самым, обнаруживая текущую позицию транспортного средства 2a водителя. GPS-приемник 96 передает информацию об обнаруженной текущей позиции транспортного средства 2a водителя электронному блоку 200 управления.
[0042] Навигатор 97 устанавливает запланированный маршрут движения транспортного средства 2a водителя на основе, например, информации о текущей позиции транспортного средства 2a водителя, которая обнаруживается посредством GPS-приемника 96, картографической информации в картографической базе данных 95 и пункта назначения, заданного водителем. Навигатор 97 передает информацию, относящуюся к заданному запланированному маршруту движения, в электронный блок 200 управления в качестве навигационной информации.
[0043] Электронный блок 200 управления является микрокомпьютером, включающим в себя центральный процессор (CPU), постоянное запоминающее устройство (ROM), оперативное запоминающее устройство (RAM), порт ввода и порт вывода, которые соединяются вместе через двухстороннюю шину.
[0044] Электронный блок 200 управления принимает не только сигналы, вводимые от датчика 154 напряжения и датчика 155 тока, но также выходные сигналы, вводимые от различных датчиков, таких как датчик 211 состояния заряда (SOC), датчик 212 нагрузки, датчик 213 угла поворота коленчатого вала и переключатель 214 зажигания. SOC-датчик 211 обнаруживает величину SOC заряда аккумулятора. Датчик 212 нагрузки создает выходное напряжение, пропорциональное величине нажатия педали 220 акселератора. Датчик 213 угла поворота коленчатого вала формирует выходной импульс в качестве сигнала для вычисления скорости двигателя или т.п. каждый раз, когда коленчатый вал (не иллюстрирован) корпуса 11 двигателя поворачивается, например, на 15°. Переключатель зажигания 214 используется для определения того, заведено ли транспортное средство 2a водителя или остановлено. Электронный блок 200 управления управляет транспортным средством 2a водителя, приводя в действие отдельные части управления на основе выходных сигналов, вводимых от датчиков.
[0045] Сервер 3 включает в себя устройство 301 связи на стороне сервера, хранилище 302 и контроллер 303. Устройство 301 связи на стороне сервера, хранилище 302 и контроллер 303 соединяются вместе через сигнальные линии.
[0046] Устройство 301 связи на стороне сервера имеет возможность связи с устройством 90 связи на стороне транспортного средства для каждого транспортного средства 2 (транспортного средства 2a водителя или другого транспортного средства 2b) посредством беспроводной связи. В ответ на запросы от транспортного средства 2 устройство 301 связи на стороне сервера передает, транспортному средству 2, различные типы информации, передаваемой от контроллера 303, и передает, контроллеру 303, информацию записи о движении, принимаемую от транспортного средства 2.
[0047] Хранилище 302 включает в себя носитель данных, такой как накопитель на жестком диске, оптический носитель записи или полупроводниковую память, чтобы хранить компьютерные программы, которые должны исполняться контроллером 303. Хранилище 302 также хранит данные, сформированные контроллером 303, и информацию о движении, принятую от каждого транспортного средства 2 контроллером 303.
[0048] Контроллер 303 включает в себя один или более процессоров, сконфигурированных, чтобы выполнять компьютерные программы для управления и вычисления на сервере 3, и периферийную схему процессоров.
[0049] Приводится описание различных типов управления, которое должно выполняться посредством электронного блока 200 управления согласно этому варианту осуществления, и различных типов управления, которое должно выполняться посредством сервера 3 вместе с управлением, выполняемым посредством электронного блока 200 управления.
[0050] Сначала, приводится описание подробностей основного управления движением для транспортного средства 2a водителя, более конкретно, подробностей основного управления переключением режимов движения, которое должно выполняться посредством электронного блока 200 управления.
[0051] Электронный блок 200 управления инструктирует транспортному средству 2a водителя двигаться, переключая, на основе величины SOC заряда аккумулятора, режим движения в режим электрического транспортного средства (EV) или режим подзарядки (CS). В частности, электронный блок 200 управления устанавливает режим движения транспортного средства 2 в EV-режим, когда величина заряда аккумулятора является равной или больше заданной величины SOC1 (например, 10% от полной величины заряда).
[0052] В EV-режиме вторая ротационная электрическая машина 40 приводится в действие, чтобы выполнять движение от мощности с помощью заряженной мощности аккумулятора 50 в приоритете, и движущая мощность, по меньшей мере, второй ротационной электрической машины 40 передается валам 17 привода колес, тем самым, вынуждая транспортное средство 2a водителя двигаться.
[0053] Когда режим движения является EV-режимом, электронный блок 200 управления приводит в действие вторую ротационную электрическую машину 40, чтобы выполнять движение от мощности с помощью заряженной мощности аккумулятора 50, в то же время останавливая двигатель 10 внутреннего сгорания, и вращает валы 17 привода колес с помощью только движущей мощности второй ротационной электрической машины 40, тем самым, вынуждая транспортное средство 2a водителя двигаться. То есть, когда режим движения является EV-режимом, электронный блок 200 управления инструктирует транспортному средству 2a водителя двигаться, регулируя, в то же время останавливая двигатель 10 внутреннего сгорания, мощность, которая должна быть выведена от второй ротационной электрической машины 40, на основе нагрузки движения, так что мощность достигает требуемой мощности в зависимости от нагрузки движения.
[0054] Когда величина SOC заряда аккумулятора меньше величины SOC1 заряда для переключения режима, электронный блок 200 управления устанавливает режим движения транспортного средства 2a водителя в режим подзарядки (CS).
[0055] В CS-режиме транспортное средство 2a водителя движется так, что величина SOC заряда аккумулятора сохраняется равной величине заряда аккумулятора, когда режим движения переключается в CS-режим (далее в данном документе называемой "величиной поддержания заряда").
[0056] Когда режим движения является CS-режимом, электронный блок 200 управления инструктирует транспортному средству 2a водителя двигаться, дополнительно переключая режим движения в CSEV-режим или CSHV-режим. В частности, электронный блок 200 управления устанавливает режим движения в CSEV-режим, когда режим движения является CS-режимом, и когда нагрузка движения меньше нагрузки переключения, и устанавливает режим движения в CSHV-режим, когда режим движения является CS-режимом, и когда нагрузка движения равна или больше нагрузки переключения. Как иллюстрировано на фиг. 3, электронный блок 200 управления изменяет нагрузку переключения в зависимости от величины SOC заряда аккумулятора, так что нагрузка переключения уменьшается, когда величина SOC заряда аккумулятора уменьшается.
[0057] CSEV-режим является аналогичным EV-режиму. То есть, вторая ротационная электрическая машина 40 приводится в действие, чтобы выполнять движение от мощности с помощью заряженной мощности аккумулятора 50 в приоритете, и движущая мощность, по меньшей мере, второй ротационной электрической машины 40 передается валам 17 привода колес, тем самым, вынуждая транспортное средство 2a водителя двигаться. То есть, вторая ротационная электрическая машина 40 приводится в движение, чтобы выполнять движение от мощности с помощью заряженной мощности аккумулятора 50, в то же время останавливая двигатель 10 внутреннего сгорания, и валы 17 привода колес вращаются с помощью только движущей мощности второй ротационной электрической машины 40, тем самым, вынуждая транспортное средство 2a водителя двигаться.
[0058] В CSHV-режиме двигатель 10 внутреннего сгорания работает, вторая ротационная электрическая машина 40 приводится в действие, чтобы выполнять движение от мощности с помощью электрической мощности, формируемой посредством первой ротационной электрической машины 30 в приоритете, и движущая мощность двигателя 10 внутреннего сгорания и второй ротационной электрической машины 40 передается валам 17 привода колес, тем самым, вынуждая транспортное средство 2a водителя двигаться. Когда режим движения является CSHV-режимом, электронный блок 200 управления инструктирует устройству 20 распределения мощности распределять движущую мощность двигателя 10 внутреннего сгорания на два компонента мощности. Одна распределенная движущая мощность двигателя 10 внутреннего сгорания передается валам 17 привода колес, а другая распределенная движущая мощность используется для рекуперативного привода первой ротационной электрической машины 30. В основном, вторая ротационная электрическая машина 40 приводится в действие, чтобы выполнять движение от мощности с помощью электрической мощности, генерируемой первой ротационной электрической машиной 30, и движущая мощность второй ротационной электрической машины 40 передается валам 17 привода колес в дополнение к одной движущей мощности двигателя 10 внутреннего сгорания, тем самым, вынуждая транспортное средство 2a водителя двигаться.
[0059] Когда режим движения является CS-режимом, электронный блок 200 управления инструктирует транспортному средству 2a водителя двигаться, регулируя мощность, которая должна выводиться от двигателя 10 внутреннего сгорания и второй ротационной электрической машины 40, на основе величины SOC заряда аккумулятора и нагрузки движения, так что мощность достигает требуемой мощности в зависимости от нагрузки движения. Нагрузка переключения является низкой, когда величина SOC заряда аккумулятора является величиной SOC1 заряда для переключения режима. Следовательно, двигатель 10 внутреннего сгорания, в основном, запускается, когда режим движения переключается с EV-режима на CS-режим, поскольку величина SOC заряда аккумулятора уменьшается до величины SOC1 заряда для переключения режима, в то время как транспортное средство движется. Таким образом, CS-режим может рассматриваться в качестве режима движения, в котором двигатель 10 внутреннего сгорания, в основном, работает, но, при условии, что тепловой КПД двигателя 10 внутреннего сгорания является низким, транспортное средство 2a водителя может двигаться с помощью мощности, выводимой только от второй ротационной электрической машины 40.
[0060] Когда режим движения является CS-режимом, и когда величина заряда аккумулятора меньше величины поддержания заряда, в то время как транспортное средство 2a водителя останавливается, электронный блок 200 управления рекуперативным образом приводит в действие первую ротационную электрическую машину 30 с помощью движущей мощности двигателя 10 внутреннего сгорания, и заряжает аккумулятор 50 электрической мощностью, генерируемой первой ротационной электрической машиной 30, так что величина заряда аккумулятора является равной или больше величины поддержания заряда.
[0061] Как описано выше, CS-режим является режимом движения, в котором двигатель 10 внутреннего сгорания, в основном, работает. Следовательно, двигатель 10 внутреннего сгорания, в основном, запускается, после того как режим движения переключается с EV-режима на CS-режим. Переключение с EV-режима на CS-режим зависит от величины SOC заряда аккумулятора. Когда EV-режим переключается на CS-режим, и двигатель 10 внутреннего сгорания запускается, отработавший газ, выпущенный из цилиндров 12 в корпусе 11 двигателя в выхлопной канал 14, выпускается в атмосферу через выхлопной канал 14.
[0062] Токсичные вещества в отработавшем газе могут быть удалены посредством устройства 15 каталитического нейтрализатора, когда прогрев устройства 15 каталитического нейтрализатора завершен, т.е., когда температура токопроводящей подложки 151 (далее в данном документе называемая "температурой TEHC слоя катализатора") является равной или выше заданной активной температуры TEHC2 (например, 450 [°C]), при которой функция регулирования отработавшего газа каталитического нейтрализатора, поддерживаемого на токопроводящей подложке 151, является активной.
[0063] Например, непосредственно после того как двигатель 10 внутреннего сгорания запускается, т.е., прежде чем прогрев устройства 15 каталитического нейтрализатора завершается, функция регулирования отработавшего газа катализатора, поддерживаемого на токопроводящей подложке 151, начинает работать, когда температура TEHC слоя катализатора является равной или выше заданной температуры TEHC1 начала активизации (например, 300 [°C]), которая ниже активной температуры TEHC2. Однако токсичные вещества в отработавшем газе не могут быть в достаточной степени удалены посредством устройства 15 каталитического нейтрализатора. Следовательно, качество выброса отработавшего газа снижается. Чтобы пресекать снижение качества выброса отработавшего газа, после того как двигатель запускается, является желательным начинать прогрев устройства 15 каталитического нейтрализатора, начиная питание энергией токопроводящей подложки 151 во время EV-режима и завершая прогрев устройства 15 каталитического нейтрализатора, прежде чем EV-режим переключается на CS-режим.
[0064] Например, когда величина SOC заряда аккумулятора уменьшается до величины SOC2 заряда для начала прогрева, которая больше величины SOC1 заряда для переключения режима во время EV-режима, устройство 15 каталитического нейтрализатора может прогреваться посредством начала питания энергией токопроводящей подложки 151, и прогрев устройства 15 каталитического нейтрализатора может быть завершен во время EV-режима, прежде чем величина SOC заряда аккумулятора уменьшится с величины SOC2 заряда для начала прогрева до величины SOC1 заряда для переключения режима, т.е., прежде чем EV-режим переключается на CS-режим. Посредством завершения прогрева устройства 15 каталитического нейтрализатора заранее посредством предварительного нагрева, в котором устройство 15 каталитического нейтрализатора электрически нагревается во время EV-режима, прежде чем двигатель запускается, снижение качества выброса отработавшего газа, после того как двигатель запускается, может быть пресечено.
[0065] Если величина SOC2 заряда для начала прогрева не установлена в соответствующее значение, величина SOC заряда аккумулятора может уменьшаться до величины SOC1 заряда для переключения режима, прежде чем прогрев устройства 15 каталитического нейтрализатора завершается. Затем, двигатель 10 внутреннего сгорания может быть запущен, прежде чем прогрев устройства 15 каталитического нейтрализатора завершается. В результате, качество выброса отработавшего газа может уменьшаться, после того как двигатель 10 внутреннего сгорания запускается. В этом случае, является желательным приводить в действие двигатель 10 внутреннего сгорания посредством управления для увеличения температуры отработавшего газа больше обычной, например, посредством задержки момента зажигания, чтобы завершать прогрев устройства 15 каталитического нейтрализатора раньше. В то время как момент зажигания задерживается, однако существует увеличение в коэффициенте тепловой энергии, высвободившейся без использования в качестве выходной энергии в энергии сгорания. Следовательно, тепловой КПД снижается. В результате, топливная экономичность снижается.
[0066] Наоборот, интервал времени может избыточно увеличиваться от завершения прогрева устройства 15 каталитического нейтрализатора до уменьшения величины SOC заряда аккумулятора до величины SOC1 заряда для переключения режима.
[0067] Если токопроводящая подложка 151 постоянно нагревается посредством подачи электрической мощности к токопроводящей подложке 151 до тех пор, пока величина SOC заряда аккумулятора не уменьшится до величины SOC1 заряда для переключения режима, после того как прогрев устройства 15 каталитического нейтрализатора завершается, электрическая мощность потребляется без надобности, чтобы уменьшать расстояние, которое может быть пройдено в EV-режиме (далее в данном документе называемое "расстоянием EV-движения"). Дополнительно, токопроводящая подложка 151 может быть нагрета чрезмерно, чтобы, например, ускорять износ токопроводящей подложки 151.
[0068] Если режим движения переключается на CS-режим, когда прогрев устройства 15 каталитического нейтрализатора завершается, расстояние EV-движения уменьшается, поскольку режим движения переключается на CS-режим, прежде чем величина SOC заряда аккумулятора является равной или меньше величины SOC1 заряда для переключения режима. Если питание энергией токопроводящей подложки 151 прекращается, когда прогрев устройства 15 каталитического нейтрализатора завершается, температура токопроводящей подложки 151 уменьшается к моменту времени, когда величина SOC заряда аккумулятора является равной или меньше величины SOC1 заряда для переключения режима. Следовательно, качество выброса отработавшего газа может снижаться, после того как двигатель 10 внутреннего сгорания запускается.
[0069] В этом варианте осуществления величина SOC2 заряда для начала прогрева устанавливается на основе выражения (1):
SOC2=Eh+Ep+SOC1 (1)
[0070] В выражении (1) величина энергии (величина электрической мощности) Eh [кВт⋅ч] является величиной энергии, которая должна быть подана к токопроводящей подложке 151, чтобы нагревать токопроводящую подложку 151 в течение заданного времени T предварительного нагрева. Время T предварительного нагрева является временем, в течение которого температура TEHC слоя катализатора может быть увеличена до активной температуры TEHC2, и определяется заранее посредством экспериментов или т.п. В этом варианте осуществления схема 153 регулирования напряжения управляется так, что мощность Ph [кВт] питания подложки является постоянной номинальной мощностью. Следовательно, величина Eh (= Ph × T) энергии является фиксированным значением.
[0071] В выражении (1) величина энергии (величина электрической мощности, или величина нагрузки движения) Ep [кВт⋅ч] является величиной энергии, необходимой для приведения в действие различных вспомогательных устройств, таких как вторая ротационная электрическая машина 40 и кондиционер воздуха транспортного средства 2a водителя, в то время как токопроводящая подложка 151 нагревается в течение времени T предварительного нагрева. То есть, величина Ep энергии является величиной энергии, необходимой для того, чтобы транспортное средство 2a водителя двигалось в течение времени T предварительного нагрева (далее в данном документе называется "величиной движущей энергии для времени предварительного нагрева"). Предположим, что нагрузка движения во время предварительного нагрева представляется как Pp [кВт], величина Ep движущей энергии для времени предварительного нагрева может быть представлена выражением (2) и может рассматриваться как величина нагрузки движения для времени предварительного нагрева.
[0072] Нагрузка Pp движения во время предварительного нагрева изменяется по-разному в зависимости, например, от маршрута движения или условий дорожного движения во время предварительного нагрева. Следовательно, существует проблема, что величину Ep движущей энергии для времени предварительного нагрева от текущей позиции транспортного средства 2a водителя трудно прогнозировать точно.
[0073] Фиг. 4 представляет собой схему, содержащую стрелки "a" по "d", указывающие примеры предыдущих показательных записей о движении, показывающих, что транспортное средство 2, проехавшее некую точку A, за перекрестком движется в течение времени T предварительного нагрева от точки A. Фиг. 5 представляет собой схему, иллюстрирующую величины Ep движущей энергии для времени предварительного нагрева от точки A, которые сравниваются между записями о движении.
[0074] На фиг. 4 запись "a" о движении показывает случай, когда сигнал светофора на перекрестке является красным, и транспортное средство 2 останавливается на перекрестке во время движения при небольшой нагрузке. Записи "b" по "d" о движении показывают случаи, когда сигнал светофора на перекрестке является зеленым, и транспортное средство 2 проезжает перекресток, чтобы повернуть налево, ехать прямо и повернуть направо, соответственно. В примере, иллюстрированном на фиг. 4, транспортное средство 2 движется по нисходящему уклону после поворота налево на перекрестке и по восходящему уклону после проезда прямо или поворота направо на перекрестке.
[0075] Как иллюстрировано на фиг. 4, различные записи о движении получаются, когда транспортное средство 2, проехавшее точку A, движется в течение времени T предварительного нагрева от точки A. Как иллюстрировано на фиг. 5, величина Ep движущей энергии для времени предварительного нагрева от точки A изменяется в зависимости от записей о движении. Например, как иллюстрировано на фиг. 5, величина Ep движущей энергии записи "a" о движении, показывающей случай, когда транспортное средство 2 останавливается на перекрестке во время движения с небольшой нагрузкой, имеет тенденцию быть меньше величин Ep движущей энергии для записей "b"-"d" о движении, показывающих случаи, когда транспортное средство 2 проезжает перекресток. Сравнивая величины Ep движущей энергии для записей "b"-"d" о движении, показывающих случаи, когда транспортное средство 2 проезжает перекресток, величина Ep движущей энергии для записи "b" о движении в случае нисходящего уклона, после того как транспортное средство 2 проезжает перекресток, имеет тенденцию быть меньше величин Ep движущей энергии для записей "c" и "d" о движении в случае восходящего уклона, после того как транспортное средство 2 проезжает перекресток.
[0076] Чтобы надлежащим образом задавать величину SOC2 заряда для начала прогрева, когда текущая позиция является, например, точкой A, необходимо точно прогнозировать величину Ep движущей энергии для времени предварительного нагрева от точки A. Как описано со ссылкой на фиг. 4 и фиг. 5, существует проблема, что величину Ep движущей энергии для времени предварительного нагрева от точки A трудно прогнозировать точно, поскольку нагрузка Pp движения изменяется по-разному в зависимости от маршрута движения или условий дорожного движения от точки A.
[0077] В этом случае информация записи о движении собирается с каждого транспортного средства 2, и соответствующее значение вычисляется в качестве величины Ep движущей энергии для времени предварительного нагрева от текущей позиции транспортного средства 2 на основе данных, полученных посредством сбора информации записи о движении.
[0078] Фиг. 6A является схемой, иллюстрирующей частотное распределение данных по величинам Ep движущей энергии для времени предварительного нагрева от точки A в транспортных средствах 2, проехавших точку A. Величина Ep движущей энергии вычисляется на основе информации записи о движении каждого транспортного средства 2. Фиг. 6B является схемой, иллюстрирующей совокупное относительное частотное распределение данных по величинам Ep движущей энергии.
[0079] Как описано выше со ссылкой на фиг. 4 и 5, записи о движении от точки A грубо классифицируются на записи "a" и "b" о движении, показывающие относительно небольшую величину Ep движущей энергии для времени предварительного нагрева от точки A, и записи "c" и "d" о движении, показывающие относительно большую величину Ep движущей энергии для времени предварительного нагрева от точки A. Как иллюстрировано на фиг. 6A, диаграмма частотного распределения данных по величинам Ep движущей энергии для времени предварительного нагрева от точки A в транспортных средствах 2, проехавших точку A, показывает частотное распределение, имеющее два пика на стороне, где величина Ep движущей энергии является относительно небольшой, и на стороне, где величина Ep движущей энергии является относительно большой.
[0080] Как иллюстрировано на фиг. 6B, следующая информация может быть легко получена посредством организации, в качестве совокупного относительного частотного распределения, данных по величинам Ep движущей энергии для времени предварительного нагрева от точки A в транспортных средствах 2, проехавших точку A.
[0081] На фиг. 6B символ "Ep1" представляет величину движущей энергии при совокупной относительной частоте, равной 1. Тот факт, что совокупная относительная частота равна 1, означает, что доля транспортных средств 2, которые могут двигаться в течение времени T предварительного нагрева от точки A с величинами движущей энергии, равными или меньше величины Ep1 движущей энергии, равна 1 среди транспортных средств 2, проехавших точку A. То есть, среди транспортных средств 2, проехавших точку A, все транспортные средства 2 движутся в течение времени T предварительного нагрева от точки A с величинами движущей энергии, равными или меньше величины Ep1 движущей энергии.
[0082] Символ "Ep2" представляет величину движущей энергии с совокупной относительной частотой, равной 0,5. Тот факт, что совокупная относительная частота равна 0,5, означает, что доля транспортных средств 2, которые могут двигаться в течение времени T предварительного нагрева от точки A с величинами движущей энергии, равными или меньше величины Ep2 движущей энергии, равна 0,5 среди транспортных средств 2, проехавших точку A. То есть, среди транспортных средств 2, проехавших точку A, половина транспортных средств 2 движутся в течение времени T предварительного нагрева от точки A с величинами движущей энергии, равными или меньше величины Ep2 движущей энергии.
[0083] Если величина Ep1 движущей энергии с совокупной относительной частотой, равной 1, подставляется в выражение (1), чтобы устанавливать величину SOC2 заряда для начала прогрева, и предварительный нагрев начинается с точки A, все транспортные средства 2, проехавшие точку A, имеют успех в предварительном нагреве, поскольку прогрев устройства 15 каталитического нейтрализатора завершается, прежде чем величина SOC заряда аккумулятора уменьшается от величины SOC2 заряда для начала прогрева до величины SOC1 заряда для переключения режима.
[0084] Если величина Ep2 движущей энергии с совокупной относительной частотой, равной 0,5, подставляется в выражение (1), чтобы устанавливать величину SOC2 заряда для начала прогрева, и предварительный нагрев начинается с точки A, половина транспортных средств 2, проехавших точку A, имеют успех в предварительном нагреве, поскольку прогрев устройства 15 каталитического нейтрализатора завершается, прежде чем величина SOC заряда аккумулятора уменьшается от величины SOC2 заряда для начала прогрева до величины SOC1 заряда для переключения режима.
[0085] Как описано выше, данные по величинам Ep движущей энергии для времени предварительного нагрева от некоторой точки в транспортных средствах 2, проехавших некоторую точку, организуются в качестве совокупного относительного частотного распределения. Когда величина Ep(α) движущей энергии с совокупной относительной частотой α подставляется в выражение (1), чтобы устанавливать величину SOC2 заряда для начала прогрева, и предварительный нагрев начинается от некоторой точки, предварительный нагрев является успешным при доле, приблизительно равной "α".
[0086] В этом варианте осуществления величины Ep движущей энергии для времени предварительного нагрева от отдельных точек на дорогах вычисляются на основе частей информации записи о движении, передаваемой от отдельных транспортных средств 2, и структура данных формируется посредством организации, в качестве совокупных относительных частотных распределений, данных по величинам Ep движущей энергии для отдельных точек.
[0087] Когда ссылка выполняется на структуру данных, и предварительный нагрев начинается от некоторой точки на дороге, прогнозируемое значение величины Ep движущей энергии, при котором вероятность успеха предварительного нагрева равна или выше заданной вероятности (далее в данном документе называется "прогнозируемой величиной Epest движущей энергии"), может быть вычислено. В частности, чтобы определять прогнозируемую величину Epest движущей энергии для времени предварительного нагрева от некоторой точки на дороге, ссылка выполняется на структуру данных, в которой данные по величинам Ep движущей энергии для времени предварительного нагрева от точки организуются в качестве совокупного относительного частотного распределения, и величина Ep движущей энергии, при которой вероятность успеха предварительного нагрева является заданной вероятностью αs (0 ≤ αs ≤ 1), т.е., величина Ep(αs) движущей энергии, при которой совокупная относительная частота α является заданной совокупной относительной частотой αs, вычисляется в качестве прогнозируемой величины Epest движущей энергии.
[0088] Когда совокупная относительная частота αs устанавливается, например, в значение, близкое к 1, прогрев устройства 15 каталитического нейтрализатора может быть завершен, с высокой вероятностью, прежде чем величина SOC заряда аккумулятора уменьшается от величины SOC2 заряда для начала прогрева до величины SOC1 заряда для переключения режима. Когда совокупная относительная частота αs делается, например, близкой к 0 от 1, возможно пресекать чрезмерное увеличение в интервале времени от завершения прогрева устройства 15 каталитического нейтрализатора до уменьшения в величине SOC заряда аккумулятора до величины SOC1 заряда для переключения режима.
[0089] Устанавливая значение совокупной относительной частоты αs в соответствующее значение в диапазоне от 0 до 1, возможно пресекать, в то же время обеспечивая вероятность успеха предварительного нагрева, увеличение в интервале времени от завершения прогрева устройства 15 каталитического нейтрализатора до уменьшения в величине SOC заряда аккумулятора до величины SOC1 заряда для переключения режима. В этом варианте осуществления совокупная относительная частота αs является фиксированным значением, но может быть переменной, зависящей, например, от профиля диаграммы частотного распределения на фиг. 6A.
[0090] Фиг. 7 является блок-схемой последовательности операций, иллюстрирующей процесс, который должен исполняться на сервере 3 (процесс генерирования структуры данных, когда части информации записи о движении передаются от транспортных средств 2 (транспортного средства 2a водителя и других транспортных средств 2b). Фиг. 7 иллюстрирует пример, в котором информация записи о движении передается от транспортного средства 2a водителя.
[0091] На этапе S101 электронный блок 200 управления передает информацию записи о движении транспортного средства 2a водителя, т.е., данные временного ряда для частей позиционной информации (долготы и широты) и нагрузки Pp движения транспортного средства 2a водителя серверу 3 в заданный момент времени. Заданный момент времени может быть каждым постоянным периодом или конечным временем одной поездки.
[0092] На этапе S102 сервер 3 вычисляет, на основе принятой информации записи о движении, направления движения транспортного средства 2a водителя и величины Ep движущей энергии для времени предварительного нагрева от отдельных точек, где части позиционной информации получены. Как иллюстрировано на фиг. 8A и фиг. 8B, сервер 3 может выяснять нагрузку Pp движения в каждый момент времени и позиционную информацию в каждый момент времени из принятой информации записи о движении. Например, величина Ep движущей энергии для времени предварительного нагрева от точки A во время t1 на фиг. 8B может быть вычислена как площадь заштрихованной зоны на фиг. 8A.
[0093] На этапе S103 сервер 3 накапливает данные о величинах Ep движущей энергии для времени предварительного нагрева от отдельных точек, которые вычисляются на этапе S102 в ассоциации с отдельными точками и отдельными направлениями движения транспортных средств.
[0094] На этапе S104 сервер 3 формирует структуру данных, организуя, в ассоциации с отдельными точками и отдельными направлениями движения транспортных средств в качестве совокупных относительных частотных распределений, данные по величинам Ep движущей энергии для времени предварительного нагрева, которые накапливаются в ассоциации с отдельными точками и отдельными направлениями движения транспортных средств. Сформированная структура данных включает в себя части позиционной информации и совокупные относительные частотные распределения, ассоциированные с отдельными направлениями движения транспортных средств и относящиеся к данным о величинах движущей энергии (величинах нагрузки движения) в зависимости от времени движения от точек, указанных посредством частей позиционной информации для транспортных средств 2, проехавших через точки.
[0095] В этом варианте осуществления величины Ep движущей энергии для заданного времени (времени предварительного нагрева) от отдельных точек вычисляются, но настоящее изобретение не ограничивается этим случаем. Сервер 3 может формировать структуру данных, вычисляя величины Ep движущей энергии для заданного расстояния от отдельных точек и организуя величины Ep движущей энергии в качестве совокупных относительных частотных распределений.
[0096] Фиг. 9 является блок-схемой последовательности операций, иллюстрирующей управление прогревом каталитического нейтрализатора в транспортном средстве 2a водителя согласно этому варианту осуществления. Электронный блок 200 управления циклически выполняет эту программу в каждом заданном периоде вычислений (например, 10 [мс]).
[0097] На этапе S1 электронный блок 200 управления определяет, установлен ли в 0 флаг F1 начала прогрева каталитического нейтрализатора. Флаг F1 начала прогрева каталитического нейтрализатора устанавливается в 1, когда прогрев устройства 15 каталитического нейтрализатора начинается, и первоначальное значение устанавливается в 0. Когда флаг F1 начала прогрева каталитического нейтрализатора равен 0, электронный блок 200 управления переходит к процессу этапа S2. Когда флаг F1 начала прогрева каталитического нейтрализатора равен 1, электронный блок 200 управления переходит к процессу этапа S7.
[0098] На этапе S2 электронный блок 200 управления выполняет процесс установки величины заряда для начала прогрева для установки величины SOC2 заряда для начала прогрева. Подробности процесса установки величины заряда для начала прогрева описываются со ссылкой на фиг. 10.
[0099] На этапе S21 электронный блок 200 управления передает сигнал запроса прогнозируемой величины Epest движущей энергии для времени предварительного нагрева от текущей позиции транспортного средства 2a водителя серверу 3 вместе с информацией, относящейся к текущей позиции и направлению движения транспортного средства 2a водителя.
[0100] На этапе S22 сервер 3 обращается к структуре данных, в которой распределение величин Ep движущей энергии для времени предварительного нагрева от текущей позиции транспортного средств 2a водителя организуется в качестве совокупного относительного частотного распределения в ассоциации с отдельными направлениями движения транспортных средств, вычисляет величину Ep движущей энергии с совокупной относительной частотой αs в качестве прогнозируемой величины Epest движущей энергии и передает прогнозируемую величину Epest движущей энергии транспортному средству 2, которое передало сигнал запроса (в этом примере транспортному средству 2a водителя).
[0101] На этапе S23 электронный блок 200 управления устанавливает величину SOC2 заряда для начала прогрева, подставляя прогнозируемую величину Epest движущей энергии в качестве величины Eh энергии для выражения (1).
[0102] Обращаясь обратно к фиг. 9, электронный блок 200 управления определяет на этапе S3, действительно ли величина SOC заряда аккумулятора меньше величины SOC2 заряда для начала прогрева. Когда величина SOC заряда аккумулятора меньше величины SOC2 заряда для начала прогрева, электронный блок 200 управления переходит к процессу этапа S4. Когда величина SOC заряда аккумулятора равна или больше величины SOC2 заряда для начала прогрева, электронный блок 200 управления завершает текущий процесс.
[0103] На этапе S4 электронный блок 200 управления определяет, действительно ли температура TEHC слоя катализатора ниже температуры TEHC1 начала активизации. Когда температура TEHC слоя катализатора ниже температуры TEHC1 начала активизации, электронный блок 200 управления переходит к процессу этапа S5. Когда температура TEHC слоя катализатора равна или выше температуры TEHC1 начала активизации, электронный блок 200 управления завершает текущий процесс, поскольку функция регулирования отработавшего газа каталитического нейтрализатора начинает работать. Температура TEHC слоя катализатора может быть обнаружена посредством датчика температуры или может быть рассчитана посредством различных известных способов расчета, таких как расчет на основе температуры охлаждающей жидкости, которая охлаждает корпус 11 двигателя.
[0104] На этапе S5 электронный блок 200 управления начинает питание энергией токопроводящей подложки 151, чтобы нагревать устройство 15 каталитического нейтрализатора. В этом варианте осуществления электронный блок 200 управления начинает прогрев устройства 15 каталитического нейтрализатора, управляя схемой 153 регулирования напряжения так, что мощность Ph питания подложки является постоянной номинальной мощностью.
[0105] На этапе S6 электронный блок 200 управления устанавливает флаг F1 начала прогрева каталитического нейтрализатора в 1.
[0106] На этапе S7 электронный блок 200 управления определяет, равна ли температура TEHC слоя катализатора или выше активной температуры TEHC2. В этом варианте осуществления, когда время от начала прогрева устройства 15 каталитического нейтрализатора равно или дольше времени T предварительного нагрева, электронный блок 200 управления определяет, что температура TEHC слоя катализатора равна или выше активной температуры TEHC2, и переходит к процессу этапа S8. Когда температура TEHC слоя катализатора ниже активной температуры TEHC2, электронный блок 200 управления завершает текущий процесс.
[0107] На этапе S8 электронный блок 200 управления прекращает питание энергией токопроводящей подложки 151, чтобы завершать прогрев устройства 15 каталитического нейтрализатора.
[0108] На этапе S9 электронный блок 200 управления сбрасывает флаг F1 начала прогрева каталитического нейтрализатора в 0.
[0109] Структура данных согласно этому варианту осуществления используется на сервере 3 (устройстве обработки информации) в системе 1 управления транспортным средством. Структура данных включает в себя части позиционной информации и части информации о совокупном относительном частотном распределении, ассоциированной с отдельными направлениями движения транспортных средств и относящейся к данным по величинам движущей энергии (величинам нагрузки движения) в зависимости от времени движения или расстояния движения от точек, указанных посредством частей позиционной информации для транспортных средств 2, проехавших через точки. Структура данных согласно этому варианту осуществления используется на сервере 3 для процесса вычисления прогнозируемой величины движущей энергии (прогнозируемого значения величины нагрузки движения) в зависимости от времени движения или расстояния движения от произвольной точки на основе направления движения транспортного средства 2 и информации о совокупном относительном частотном распределении в произвольной точке.
[0110] Таким образом, структура данных согласно этому варианту осуществления включает в себя части информации о совокупном относительном частотном распределении, относящейся к данным по величинам движущей энергии для времени движения или расстояния движения от отдельных точек на дорогах для транспортных средств 2, проехавших отдельные точки на дорогах. Обращаясь к этой структуре данных, прогнозируемая величина движущей энергии для времени движения или расстояния движения от произвольной точки может быть вычислена точно.
[0111] Структура данных согласно этому варианту осуществления используется на сервере 3 для процесса, когда сигнал запроса, содержащий текущую позицию и направление движения транспортного средства, принимается от транспортного средства, вычисления прогнозируемой величины движущей энергии в зависимости от времени движения или расстояния движения от текущей позиции транспортного средства на основе информации о совокупном относительном частотном распределении, ассоциированной с отдельными направлениями движения транспортного средства в текущей позиции транспортного средства, и передачи прогнозируемой величины движущей энергии транспортному средству, которое передало сигнал запроса.
[0112] Согласно этому варианту осуществления, транспортное средство 2 в системе 1 управления транспортного средства включает в себя двигатель 10 внутреннего сгорания, электрически нагреваемое устройство 15 каталитического нейтрализатора, предусмотренное в выхлопном канале 14 двигателя 10 внутреннего сгорания и которое должно нагреваться посредством питания энергией, и заряжаемый и разряжаемый аккумулятор 50. Электронный блок 200 управления (устройство управления транспортным средством), сконфигурированный, чтобы управлять транспортным средством 2, управляет транспортным средством 2 на основе прогнозируемой величины движущей энергии, вычисленной с помощью структуры данных. В частности, электронный блок 200 управления устанавливает целевое значение величины SOC заряда аккумулятора, при котором питание энергией токопроводящей подложки 151 начинается, на основе прогнозируемой величины движущей энергии в зависимости от времени движения или расстояния движения от текущей позиции транспортного средства 2.
[0113] Таким образом, величина SOC2 заряда для начала прогрева может быть установлена посредством точной оценки величины движущей энергии, необходимой, чтобы завершить электрический нагрев устройства 15 каталитического нейтрализатора (предварительный нагрев). Следовательно, является возможным пресекать уменьшение в величине SOC заряда аккумулятора до величины SOC1 заряда для переключения режима, прежде чем предварительный нагрев завершается, или пресекать чрезмерное увеличение интервала времени от завершения предварительного нагрева до уменьшения величины SOC заряда аккумулятора до величины SOC1 заряда для переключения режима.
[0114] Структура данных согласно этому варианту осуществления для использования на сервере 3 (устройстве обработки данных) в системе 1 управления транспортным средством формируется посредством получения данных временного ряда для частей позиционной информации и нагрузок движения в отдельных точках, где транспортные средства проехали, вычисления, на основе данных временного ряда, направлений движения транспортных средств, от которых данные временного ряда получены, и величин нагрузки движения транспортных средств в зависимости от времени движения или направления движения от отдельных точек, где части позиционной информации получены, накопления данных по вычисленным величинам нагрузки движения в зависимости от времени движения или расстояния движения от отдельных точек в ассоциации с отдельными точками и отдельными направлениями движения, и создания, в ассоциации с отдельными точками и отдельными направлениями движения, совокупных относительных частотных распределений величин нагрузки движения в зависимости от времени движения или расстояния движения от отдельных точек на основе данных по величинам нагрузки движения, которые собираются в ассоциации с отдельными точками и отдельными направлениями движения.
[0115] Способ для генерирования структуры данных согласно этому варианту осуществления посредством сервера 3 (устройства обработки информации) в системе 1 управления транспортным средством включает в себя первый этап получения данных временного ряда для частей позиционной информации и нагрузок движения в отдельных точках, где транспортные средства проехали, второй этап вычисления, на основе данных временного ряда, направлений движения транспортных средств, от которых данные временного ряда получены, и величин нагрузки движения транспортных средств в зависимости от времени движения или расстояния движения от отдельных точек, где части позиционной информации получены, третий этап накопления, в ассоциации с отдельными точками и отдельными направлениями движения, данных по величинам нагрузки движения в зависимости от времени движения или расстояния движения от отдельных точек, которые вычислены на втором этапе, и четвертый этап создания, в ассоциации с отдельными точками и отдельными направлениями движения, совокупных относительных частотных распределений величин нагрузки движения в зависимости от времени движения или расстояния движения от отдельных точек на основе данных по величинам нагрузки движения, которые собираются в ассоциации с отдельными точками и отдельными направлениями движения.
Второй вариант осуществления
[0116] Далее описывается второй вариант осуществления настоящего изобретения. Этот вариант осуществления отличается от первого варианта осуществления в том, что временное запаздывание от передачи сигнала запроса до приема прогнозируемой величины Epest движущей энергии принимается во внимание. Это различие, главным образом, описывается ниже.
[0117] В первом варианте осуществления транспортное средство 2a водителя передает информацию о текущей позиции транспортного средства 2a водителя серверу 3 вместе с сигналом запроса, и прогнозируемая величина Epest движущей энергии для времени предварительного нагрева от текущей позиции транспортного средства 2a водителя получается через сервер 3.
[0118] Следовательно, временное запаздывание возникает вследствие задержки связи от передачи сигнала запроса до приема прогнозируемой величины Epest движущей энергии. Как иллюстрировано на фиг. 11, транспортное средство 2a водителя может двигаться в периоде от передачи сигнала запроса до приема прогнозируемой величины Epest движущей энергии, и точка A, где сигнал запроса передается, может отличаться от точки B, где прогнозируемая величина Epest движущей энергии принимается.
[0119] В этом случае, прогнозируемая величина Epest движущей энергии для времени предварительного нагрева из точки B является необходимой, чтобы надлежащим образом устанавливать величину SOC2 заряда для начала прогрева. В первом варианте осуществления, однако данные, принятые от сервера 3, являются прогнозируемой величиной Epest движущей энергии для времени предварительного нагрева от точки A.
[0120] В этом варианте осуществления прогнозируемая величина Epest движущей энергии для времени предварительного нагрева от точки B оценивается посредством линейной интерполяции. Описание приводится для способа расчета прогнозируемой величины Epest движущей энергии посредством линейной интерполяции с учетом временного запаздывания.
[0121] Чтобы рассчитать прогнозируемую величину Epest движущей энергии для времени предварительного нагрева от точки B посредством линейной интерполяции, необходимо получить прогнозируемые величины Epest движущей энергии для времени предварительного нагрева от двух точек, отличных от точки B.
[0122] В этом варианте осуществления прогнозируемая величина Epest движущей энергии для времени предварительного нагрева от точки A, где сигнал запроса передается (см. фиг. 11), сначала вычисляется аналогично первому варианту осуществления. В этом варианте осуществления прогнозируемая величина Epest движущей энергии для времени предварительного нагрева от точки A, где сигнал запроса передается, называется "первой прогнозируемой величиной Epest1 движущей энергии" для удобства.
[0123] Далее, точки C прибытия (см. фиг. 11), где транспортные средства 2 двигались после истечения возможного максимального времени временного запаздывания (далее в данном документе называемого "максимальным временем задержки") от точки A, где сигналы запроса были переданы, извлекаются на основе частей предыдущей информации записи о движении транспортных средств 2. Затем, структура данных создается посредством компиляции данных по величинам Ep движущей энергии для времени предварительного нагрева из точек C прибытия и организации данных в качестве совокупных относительных частотных распределений. Обращаясь к структуре данных, величина Ep движущей энергии, когда совокупная относительная частота α является заданной совокупной относительной частотой αs, вычисляется в качестве прогнозируемой величины Epest2 движущей энергии для времени предварительного нагрева от точек C прибытия после истечения максимального времени задержки (далее в данном документе называется "второй прогнозируемой величиной движущей энергии").
[0124] Как иллюстрировано на фиг. 12, t1 представляет время, когда сигнал запроса отправляется, t2 представляет время, когда ответ на сигнал запроса принимается, а t3 представляет время после истечения максимального времени задержки от времени t1. Прогнозируемая величина Epest движущей энергии для времени предварительного нагрева от времени t2 (точка B) рассчитывается посредством линейной интерполяции с помощью первой прогнозируемой величины Epest1 движущей энергии для времени предварительного нагрева от времени t1 (точка A) и второй прогнозируемой величины Epest2 движущей энергии для времени предварительного нагрева от времени t3 (точка C прибытия).
[0125] Фиг. 13 является блок-схемой последовательности операций, иллюстрирующей подробности процесса установки величины заряда для начала прогрева согласно этому варианту осуществления. На фиг. 13 процесс этапа S23 является аналогичным процессу первого варианта осуществления, и его описание пропускается.
[0126] На этапе S31 электронный блок 200 управления передает сигнал запроса для первой прогнозируемой величины Epest1 движущей энергии и второй прогнозируемой величины Epest2 движущей энергии серверу вместе с информацией, относящейся к текущей позиции и направлению движения транспортного средства 2a водителя. В этом варианте осуществления сигнал запроса содержит время t1 передачи.
[0127] На этапе S32 сервер 3 обращается к структуре данных, в которой данные по величинам Ep движущей энергии для времени предварительного нагрева от текущей позиции транспортного средства 2a водителя организуются в качестве совокупного относительного частотного распределения, и вычисляет, в качестве первой прогнозируемой величины Epest1 движущей энергии, величину Ep движущей энергии, когда совокупная относительная частота α является заданным значением αs.
[0128] На этапе S33 сервер 3 извлекает, на основе частей предыдущей информации записи о движении транспортных средств 2, точки C прибытия транспортных средств 2 после истечения максимального времени задержки от времени t1 передачи сигнала запроса. Затем, сервер 3 формирует структуру данных, компилируя данные по величинам Ep движущей энергии для времени предварительного нагрева от точек C прибытия и организуя данные как совокупные относительные частотные распределения. Затем, сервер 3 обращается к структуре данных и вычисляет, в качестве второй прогнозируемой величины Epest2 движущей энергии, величину Ep движущей энергии, когда совокупная относительная частота α является заданной совокупной относительной частотой αs.
[0129] На этапе S34 сервер 3 передает первую прогнозируемую величину Epest1 движущей энергии и вторую прогнозируемую величину Epest2 движущей энергии транспортному средству 2a водителя, которое передало сигнал запроса.
[0130] На этапе S35 транспортное средство 2a водителя рассчитывает прогнозируемую величину Epest движущей энергии для времени предварительного нагрева от текущей позиции транспортного средства 2a водителя во время t2 приема первой прогнозируемой величины Epest1 движущей энергии и второй величины Epest2 движущей энергии посредством линейной интерполяции с помощью первой прогнозируемой величины Epest1 движущей энергии, второй прогнозируемой величины Epest2 движущей энергии и времени t2 приема.
[0131] Структура данных согласно этому варианту осуществления используется на сервере 3 (устройстве обработки информации) в системе 1 управления транспортным средством. Структура данных включает в себя части позиционной информации, части первой информации о совокупном относительном частотном распределении, ассоциированной с отдельными направлениями движения транспортного средства и относящейся к данным по величинам движущей энергии (величинам нагрузки движения) в зависимости от времени движения или расстояния движения от точек, указанных посредством частей позиционной информации для транспортных средств 2, проехавших через точки, и части второй информации о совокупном относительном частотном распределении, ассоциированной с отдельными направлениями движения и относящейся к данным по величинам нагрузки движения в зависимости от времени движения или расстояния движения от точек, где транспортные точки 2, проехавшие через точки, указанные посредством частей позиционной информации, движутся после истечения заданного максимального времени задержки связи от точек.
[0132] Структура данных используется на сервере 3 для процесса, когда сигнал запроса, содержащий текущую позицию и направление движения транспортного средства, принимается от транспортного средства, вычисления первой прогнозируемой величины Epest1 движущей энергии (прогнозируемого значения первой величины нагрузки движения) в зависимости от времени движения или расстояния движения от текущей позиции транспортного средства на основе первой информации о совокупном относительном частотном распределении, ассоциированной с отдельными направлениями движения транспортного средства в текущей позиции транспортного средства, вычисления второй прогнозируемой величины Epest2 движущей энергии (прогнозируемого значения второй величины нагрузки движения) в зависимости от времени движения или расстояния движения от точки, где транспортное средство, как ожидается, должно ехать после истечения максимального времени задержки связи, на основе второй информации о совокупном относительном частотном распределении, ассоциированной с отдельными направлениями движения транспортного средства в текущей позиции транспортного средства, и передачи первой прогнозируемой величины Epest1 движущей энергии и второй прогнозируемой величины Epest2 движущей энергии транспортному средству 2, которое передало сигнал запроса.
[0133] Согласно этому варианту осуществления, электронный блок 200 управления (устройство управления транспортным средством), сконфигурированный, чтобы управлять транспортным средством 2 в системе 1 управления транспортным средством, вычисляет, на основе первой прогнозируемой величины Epest1 движущей энергии и второй прогнозируемой величины Epest2 движущей энергии, вычисленных с помощью структуры данных согласно этому варианту осуществления, величину нагрузки движения в зависимости от времени движения или расстояния движения от произвольной точки между текущей позицией транспортного средства 2 и точкой, где транспортное средство 2, как ожидается, должно ехать после истечения максимального времени задержки связи.
[0134] Более конкретно, электронный блок 200 управления вычисляет, посредством линейной интерполяции с помощью первой прогнозируемой величины Epest1 движущей энергии и второй прогнозируемой величины Epest2 движущей энергии, величину нагрузки движения в зависимости от времени движения или расстояния движения от произвольной точки между текущей позицией транспортного средства 2 и точкой, где транспортное средство 2, как ожидается, должно двигаться после истечения максимального времени задержки связи.
[0135] Таким образом, возможно точно рассчитывать величину движущей энергии в зависимости от времени движения или расстояния движения от точки, где транспортное средство 2 принимает прогнозируемую величину движущей энергии.
Третий вариант осуществления
[0136] Далее описывается третий вариант осуществления настоящего изобретения. Этот вариант осуществления отличается от вариантов осуществления, описанных выше, в том, что данные по величинам Ep движущей энергии, организованным в ассоциации с отдельными точками, также организуются в ассоциации с зоной, включающей в себя множество точек. Это различие, главным образом, описывается ниже.
[0137] В первом варианте осуществления структура данных формируется посредством организации данных по величинам Ep движущей энергии для времени предварительного нагрева от каждой точки на дороге в качестве совокупного относительного частотного распределения в ассоциации с отдельными направлениями движения транспортного средства, и структура данных организуется в ассоциации с каждой точкой.
[0138] Отклонение может возникать между фактической точкой движения транспортного средства 2a водителя и точкой, обнаруженной посредством GPS-приемника 96. Когда отклонение возникает, прогнозируемая величина Ep движущей энергии вычисляется посредством обращения к структуре данных, в которой данные по величинам Ep движущей энергии для времени предварительного нагрева от обнаруженной точки, отличной от фактической точки движения, организуются в качестве совокупного относительного частотного распределения. Тогда величина SOC2 заряда для начала прогрева не может быть установлена в соответствующее значение. Следовательно, величина SOC заряда аккумулятора может уменьшаться до величины SOC1 заряда для переключения режима, прежде чем прогрев устройства 15 каталитического нейтрализатора завершается, или интервал времени может чрезмерно увеличиваться от завершения прогрева устройства 15 каталитического нейтрализатора до уменьшения величины SOC заряда аккумулятора до величины SOC1 заряда для переключения режима.
[0139] В этом варианте осуществления, в точке, где отклонение вероятно должно возникать, данные по величинам Ep движущей энергии не организуются в ассоциации с каждой точкой, но организуются в ассоциации с зоной, включающей в себя множество точек. Затем, структура данных формируется посредством организации данных по величинам Ep движущей энергии для времени предварительного нагрева из зоны в качестве совокупного относительного частотного распределения.
[0140] В этом варианте осуществления отклонение между точкой движения транспортного средства 2a водителя и точкой, обнаруженной посредством GPS-приемника 96, вероятно должно возникать, например, на дорогах с пересечением на разных уровнях, соседних дорогах с различием по высоте, и разветвляющихся дорогах с различием по высоте до заданной степени или более, одна из которых имеет восходящий уклон, а другая из которых имеет нисходящий уклон. Например, как иллюстрировано на фиг. 14, заданная зона, включающая в себя множество точек на дорогах, где отклонение вероятно должно возникать, предварительно сохраняется на сервере 3 в качестве зоны низкой точности прогнозирования. На фиг. 14 круги и треугольники представляют отдельные точки на дорогах.
[0141] Фиг. 15 является блок-схемой последовательности операций, иллюстрирующей процесс, который должен исполняться на сервере 3 согласно этому варианту осуществления (процесс генерирования структуры данных), когда части информации записи о движении передаются от транспортных средств 2 (транспортного средства 2a водителя и других транспортных средств 2b). На фиг. 15 процессы этапов S101-S104 являются аналогичными процессам первого варианта осуществления, и их описание пропускается.
[0142] На этапе S201 сервер 3 определяет, включают ли в себя точки, где части позиционной информации получены, точки в зоне низкой точности прогнозирования. Когда точки, где части позиционной информации получены, не включают в себя точки в зоне низкой точности прогнозирования, сервер 3 завершает процесс. Когда точки, где части позиционной информации получены, включают в себя точки в зоне низкой точности прогнозирования, сервер 3 переходит к процессу этапа S202.
[0143] На этапе S202 сервер 3 формирует структуру данных (далее в данном документе называемую "структурой данных зоны"), компилируя данные по величинам Ep движущей энергии для времени предварительного прогрева от отдельных точках в зоне низкой точности прогнозирования, которые накапливаются в ассоциации с отдельными точками и отдельными направлениями движения транспортного средства, и организует скомпилированные данные в качестве совокупного относительного частотного распределения.
[0144] Фиг. 16 является блок-схемой последовательности операций, иллюстрирующей подробности процесса установки величины заряда для начала прогрева согласно этому варианту осуществления. На фиг. 16 процессы этапов S21-S23 являются аналогичными процессам первого варианта осуществления, и их описание пропускается.
[0145] На этапе S41 сервер 3 определяет, находится ли текущая позиция транспортного средства 2a водителя в зоне низкой точности прогнозирования. Когда текущая позиция транспортного средства 2a водителя не находится в зоне низкой точности прогнозирования, сервер 3 переходит к процессу этапа S42. Когда текущая позиция транспортного средства 2a водителя находится в зоне низкой точности прогнозирования, сервер 3 переходит к процессу этапа S43.
[0146] На этапе S42 сервер 3 обращается к структуре данных, в которой данные по величинам Ep движущей энергии для времени предварительного нагрева от текущей позиции транспортного средства 2a водителя организуются в качестве совокупного относительного частотного распределения, и вычисляет, в качестве прогнозируемой величины Epest движущей энергии, величину Ep движущей энергии, когда совокупная относительная частота α является заданной совокупной относительной частотой αs.
[0147] На этапе S43 сервер 3 обращается к структуре данных зоны, в которой данные по величинам Ep движущей энергии для заданного времени нагрева из зоны низкой точности прогнозирования, где транспортное средство 2a водителя присутствует, организуются в качестве совокупного относительного частотного распределения, и вычисляет, в качестве прогнозируемой величины Epest движущей энергии, величину Ep движущей энергии, когда совокупная относительная частота α является заданной совокупной относительной частотой αs.
[0148] В зоне низкой точности прогнозирования прогнозируемая величина Eset движущей энергии вычисляется на основе структуры данных зоны, в которой данные, полученные посредством компилирования величин движущей энергии в отдельных точках в зоне, организуются в качестве совокупного относительного частотного распределения. Следовательно, является возможным пресекать значительное отклонение прогнозируемой величины Epest движущей энергии, даже если фактическая точка движения транспортного средства 2a водителя и точка, обнаруженная посредством GPS-приемника 96, отклоняются друг от друга в зоне низкой точности прогнозирования. Когда фактическая точка движения транспортного средства 2a водителя и точка, обнаруженная посредством GPS-приемника 96, не отклоняются друг от друга в зоне низкой точности прогнозирования, точность прогнозирования величины движущей энергии уменьшается до некоторой степени по сравнению с точностью прогнозируемой величины Epest движущей энергии, вычисленной посредством обращения к структуре данных, в которой данные по величинам Ep движущей энергии для времени предварительного нагрева от отдельных точек организуются в качестве совокупных относительных частотных распределений.
[0149] На этапе S44 сервер 3 передает вычисленную прогнозируемую величину Epest движущей энергии транспортному средству 2, которое передало сигнал запроса (в этом примере транспортному средству 2a водителя).
[0150] Структура данных согласно этому варианту осуществления используется на сервере 3 (устройстве обработки информации) в системе 1 управления транспортным средством. Структура данных включает в себя части позиционной информации, части первой информации о совокупном относительном частотном распределении, ассоциированной с отдельными направлениями движения транспортного средства и относящейся к данным по величинам движущей энергии (величинам нагрузки движения) в зависимости от времени движения или расстояния движения от точек, указанных посредством частей позиционной информации для транспортных средств 2, проехавших через точки, и части третьей информации о совокупном относительном частотном распределении, относящейся к данным, полученным посредством компиляции величин движущей энергии в зависимости от времени движения или расстояния движения от отдельных точек в зонах низкой точности прогнозирования, имеющих низкую точность прогнозирования прогнозируемого значения величины движущей энергии.
[0151] Структура данных используется на сервере 3 для процесса вычисления, когда транспортное средство 2 находится в зоне низкой точности прогнозирования, прогнозируемого значения величины нагрузки движения в зависимости от времени движения или расстояния движения из зоны низкой точности прогнозирования на основе третьей информации о совокупном относительном частотном распределении.
[0152] В зоне низкой точности прогнозирования прогнозируемая величина движущей энергии вычисляется на основе структуры данных зоны, в которой данные, полученные посредством компилирования величин движущей энергии в отдельных точках в зоне, организуются в качестве совокупного относительного частотного распределения. Следовательно, является возможным пресекать значительное отклонение прогнозируемой величины движущей энергии, даже если фактическая точка движения транспортного средства 2a водителя и точка, обнаруженная посредством GPS-приемника 96, отклоняются друг от друга в зоне низкой точности прогнозирования.
[0153] Хотя варианты осуществления настоящего изобретения описаны выше, варианты осуществления являются лишь частью примеров применения настоящего изобретения, и не предназначаются, чтобы ограничивать технические рамки настоящего изобретения конкретными структурами вариантов осуществления.
[0154] Например, в вариантах осуществления, описанных выше, структура данных формируется посредством организации данных по величинам Ep движущей энергии для времени предварительного нагрева от отдельных точек в ассоциации с отдельными направлениями движения транспортного средства в качестве совокупных относительных частотных распределений, и прогнозируемая величина Epest энергии для времени предварительного нагрева от текущей позиции вычисляется посредством обращения к структуре данных.
[0155] Настоящее изобретение не ограничивается этим случаем. Например, когда структура данных формируется посредством организации данных по нагрузкам Pp движения в отдельных точках в ассоциации с отдельными направлениями движения транспортного средства в качестве совокупных относительных частотных распределений, нагрузки движения в отдельных точках, где транспортное средство, как ожидается, должно двигаться в будущем, могут быть точно спрогнозированы посредством обращения к структуре данных. Прогнозируемая величина энергии, которая должна быть необходима в будущем, может быть вычислена посредством сложения прогнозируемых значений нагрузок движения в отдельных точках, где транспортное средство, как ожидается, должно двигаться в будущем. То есть, в качестве структуры данных для точного прогнозирования величины движущей энергии, которая должна быть необходима в будущем, структура данных может быть сформирована посредством организации данных по нагрузкам Pp движения в отдельных точках в ассоциации с отдельными направлениями движения транспортного средства в качестве совокупных относительных частотных распределений.
[0156] В вариантах осуществления, описанных выше, для того, чтобы устанавливать величину SOC2 заряда для начала прогрева в соответствующее значение, структура данных формируется посредством организации данных по величинам Ep движущей энергии для времени предварительного нагрева от отдельных точек в качестве совокупных относительных частотных распределений.
[0157] Когда структура данных формируется посредством организации данных по величинам Ep движущей энергии для заданного времени или заданного расстояния от отдельных точек в качестве совокупных относительных частотных распределений, величины Ep движущей энергии для заданного времени или заданного расстояния от текущей позиции и некоторой точки в будущем могут быть точно спрогнозированы посредством обращения к структуре данных. Результаты прогнозирования могут быть использованы не только для задания величины SOC2 заряда для начала прогрева, но также для различных типов управления, как указано далее.
[0158] Например, когда гибридное транспортное средство или гибридное транспортное средство со штепсельным соединением движется по дороге, имеющей большую нагрузку движения во время CS-режима, двигатель 10 внутреннего сгорания должен работать с большой нагрузкой. В результате, устройство 15 каталитического нейтрализатора может изнашиваться, поскольку устройство 15 каталитического нейтрализатора постоянно подвергается воздействию отработавшего газа высокой температуры.
[0159] Например, величина Ep движущей энергии для заданного времени или заданного расстояния от текущей позиции прогнозируется во время EV-режима. Когда прогнозируемая величина Ep движущей энергии равна или больше заданной величины β1, т.е., когда существует сильная вероятность того, что транспортное средство может двигаться с большой нагрузкой в будущем, двигатель 10 внутреннего сгорания запускается в этот момент времени и работает с небольшой нагрузкой, чтобы заряжать аккумулятор 50 заранее. Следовательно, когда транспортное средство фактически движется по дороге, имеющей большую нагрузку движения, транспортное средство может двигаться в EV-режиме, в то же время останавливая двигатель 10 внутреннего сгорания. Таким образом, является возможным пресекать изнашивание устройства 15 каталитического нейтрализатора вследствие длительного подвергания устройства 15 каталитического нейтрализатора воздействию отработавшего газа высокой температуры.
[0160] Гибридное транспортное средство или гибридное транспортное средство со штепсельным соединением предоставляет заданное ощущение замедления, заряжая аккумулятор 50, когда транспортное средство движется по нисходящему уклону. Когда аккумулятор 50 является полностью заряженным, однако аккумулятор 50 не может заряжаться. Следовательно, двигатель 10 внутреннего сгорания должен быть запущен, чтобы обеспечивать заданное ощущение замедления посредством так называемого торможения двигателем. Таким образом, топливная экономичность снижается вследствие запуска двигателя.
[0161] Например, величина Ep движущей энергии для заданного времени или заданного расстояния от текущей позиции прогнозируется. Когда прогнозируемая величина Ep движущей энергии меньше заданной величины β2, т.е., когда существует сильная вероятность того, что транспортное средство может двигаться по дороге, имеющей небольшую нагрузку в будущем, возможно нисходящий уклон, режим движения переключается на EV-режим, чтобы активно понижать величину SOC заряда аккумулятора. Следовательно, нет необходимости запускать двигатель 10 внутреннего сгорания для того, чтобы просто обеспечивать ощущение замедления посредством торможения двигателем. Таким образом, снижение топливной экономичности может быть пресечено.
[0162] В первом варианте осуществления структура данных создается в ассоциации с отдельными точками посредством организации данных по величинам Ep движущей энергии для заданного времени или заданного расстояния от отдельных точек в качестве совокупных относительных частотных распределений. Когда дороги на карте делятся на множество участков, и отдельные идентификаторы (ID) (ID отрезков) назначаются участкам дороги заранее, структура данных может быть создана в ассоциации с участками дороги посредством организации данных по величинам Ep движущей энергии для заданного времени или заданного расстояния от отдельных участков дороги в качестве совокупных относительных частотных распределений.
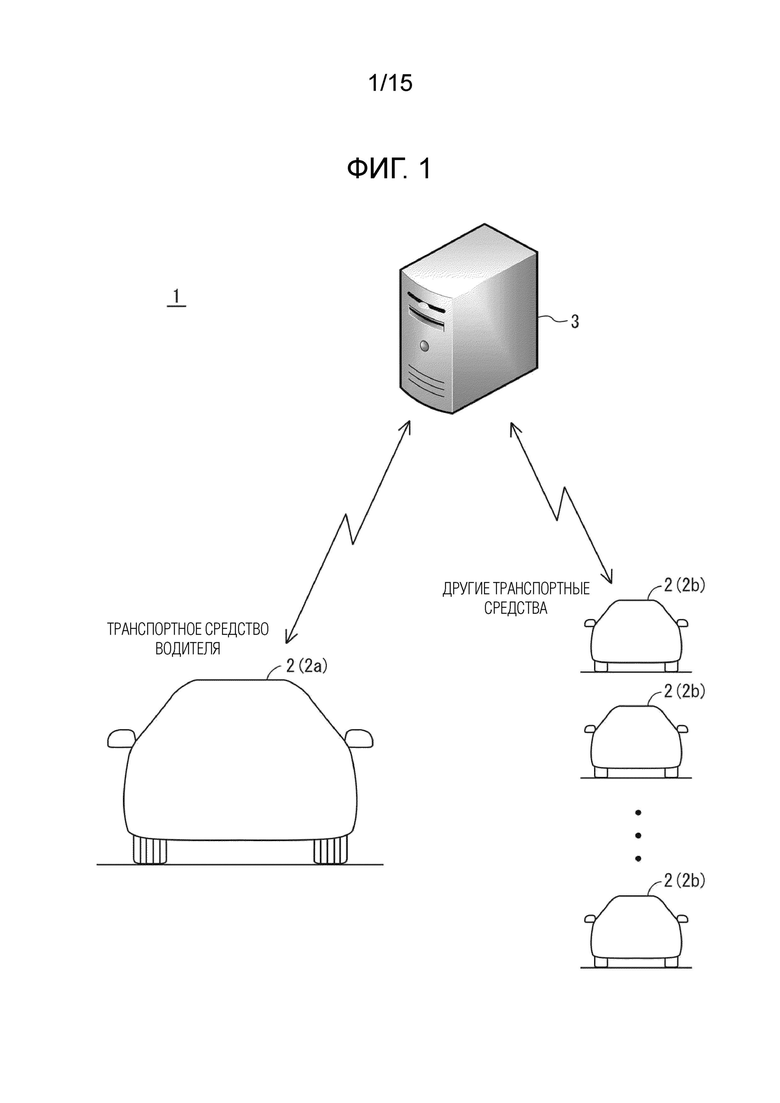
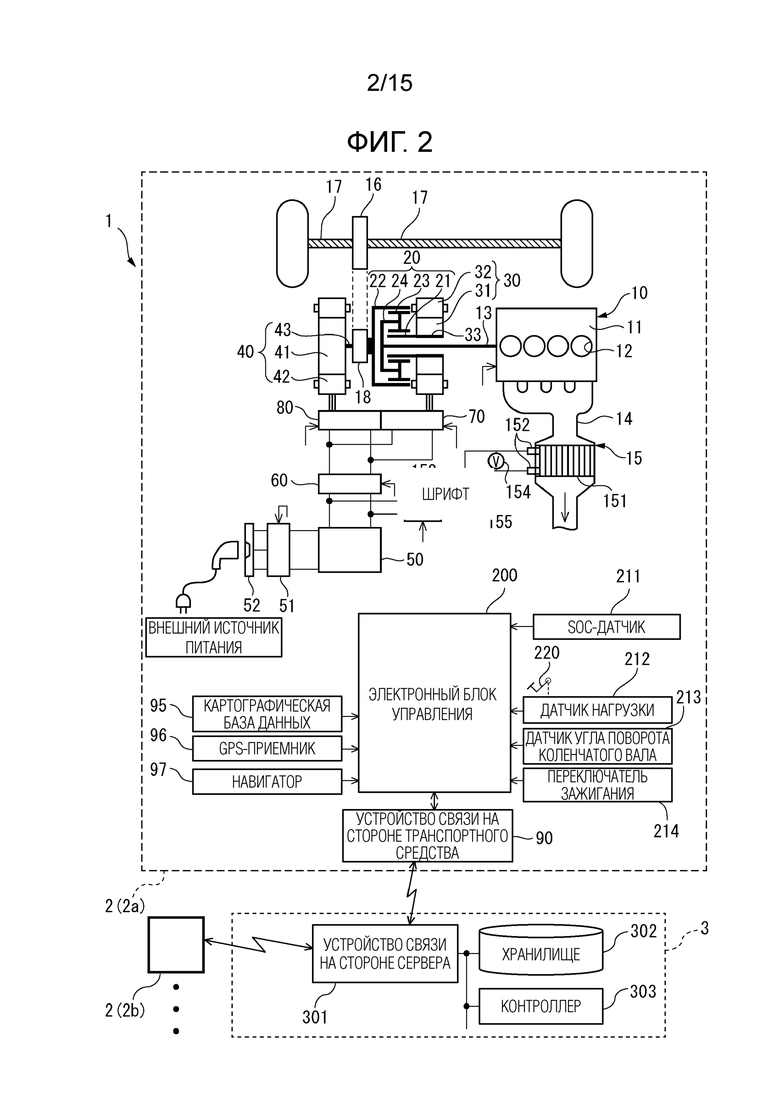
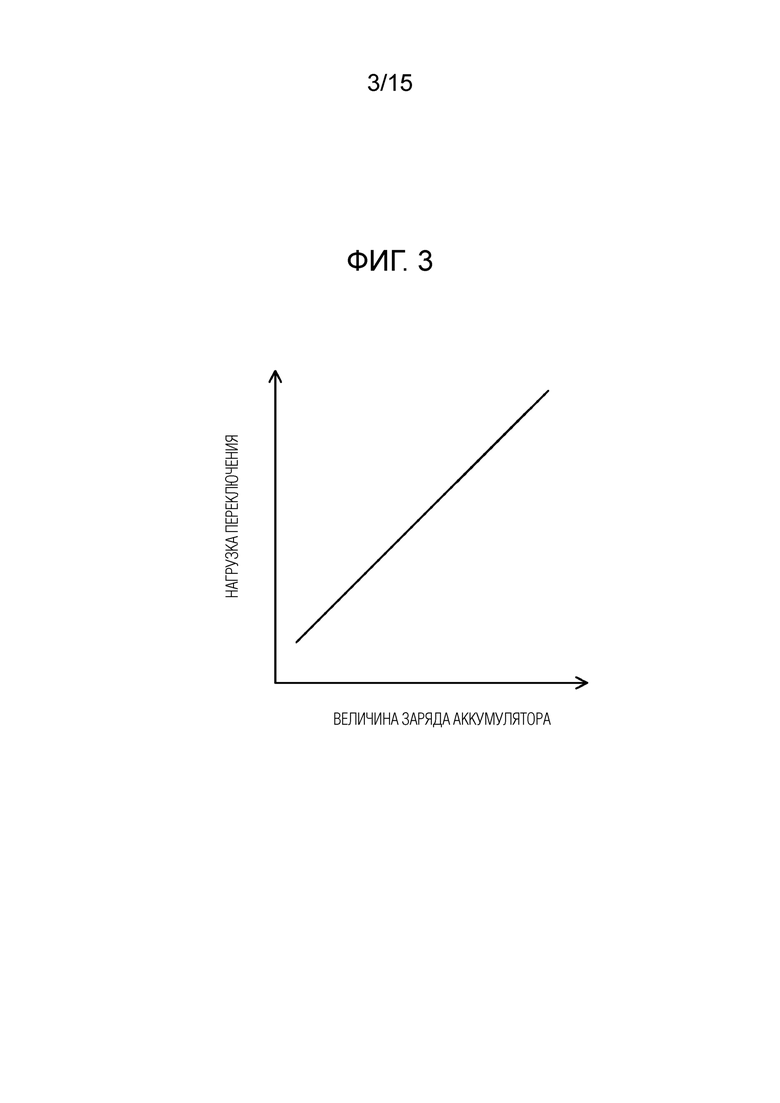
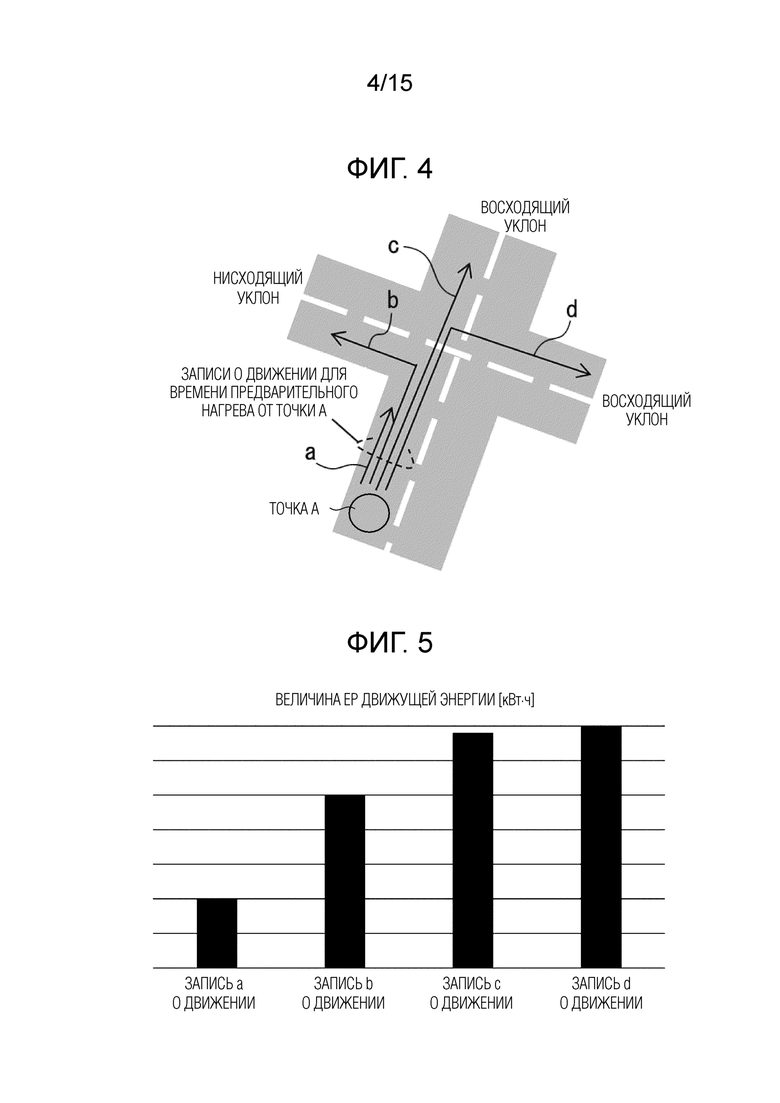
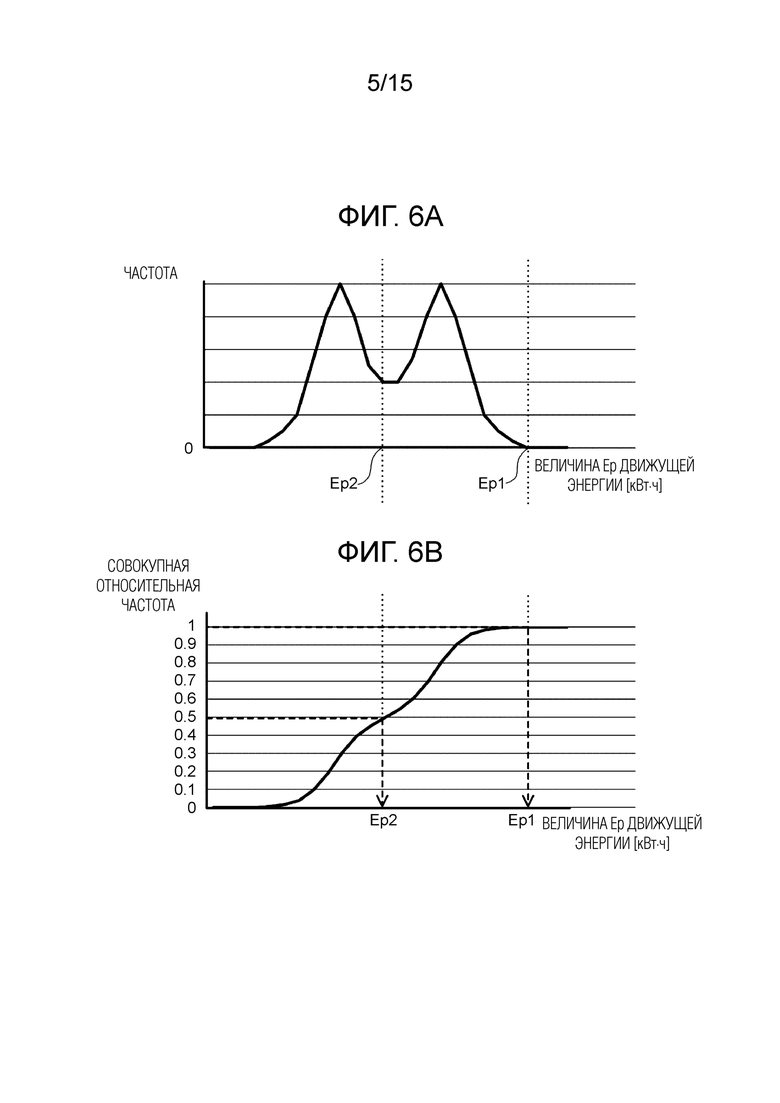
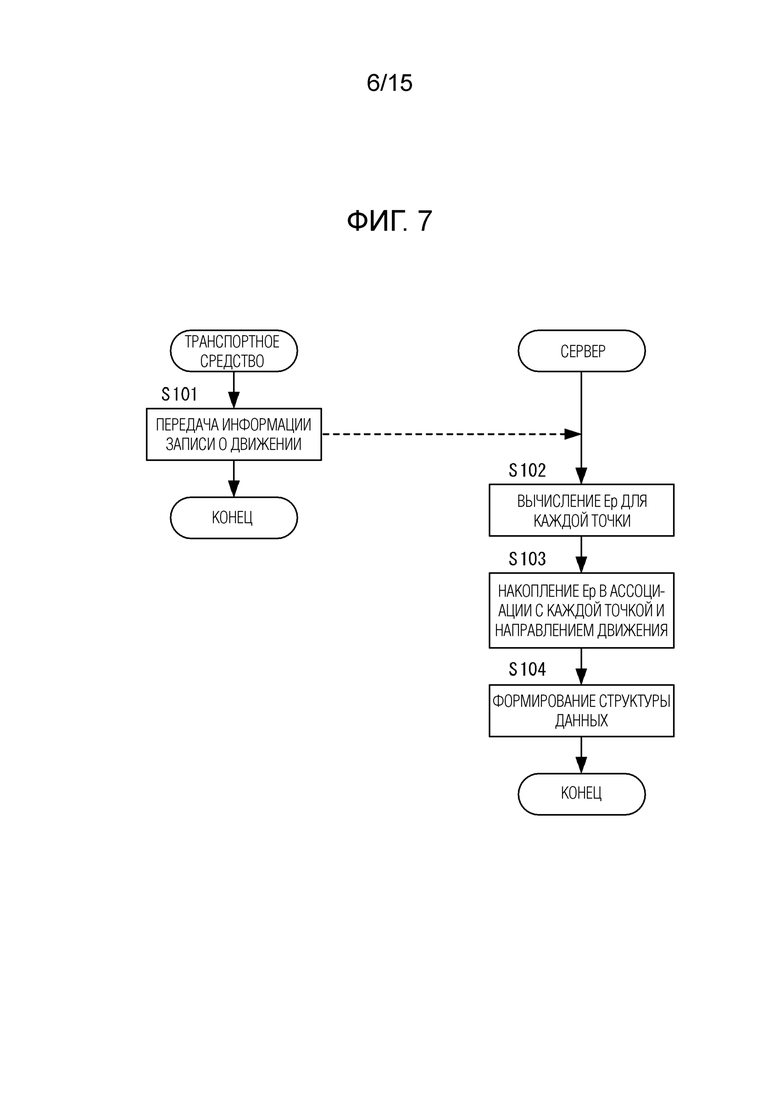
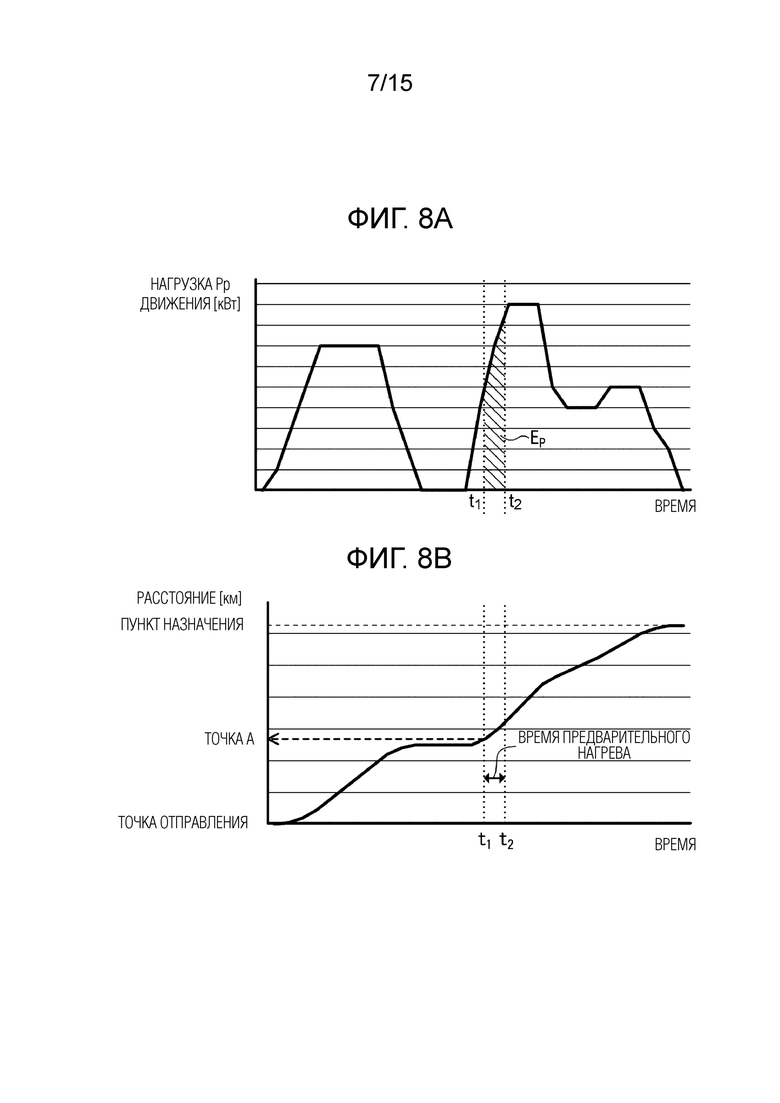
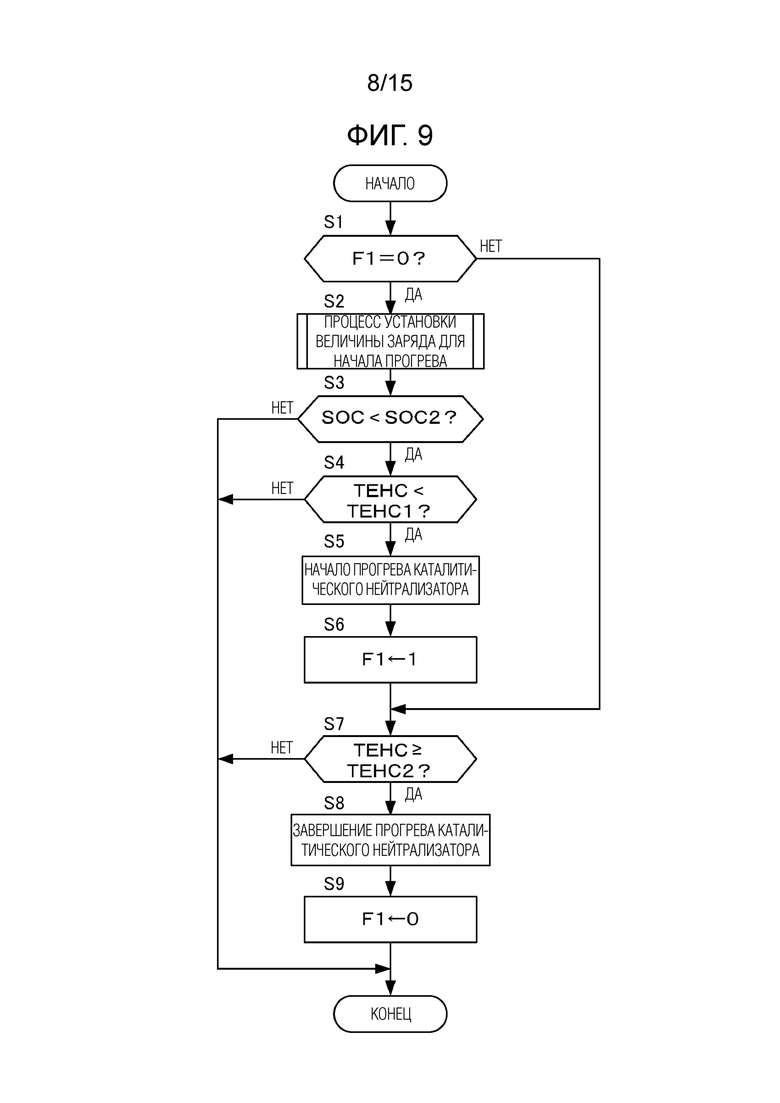
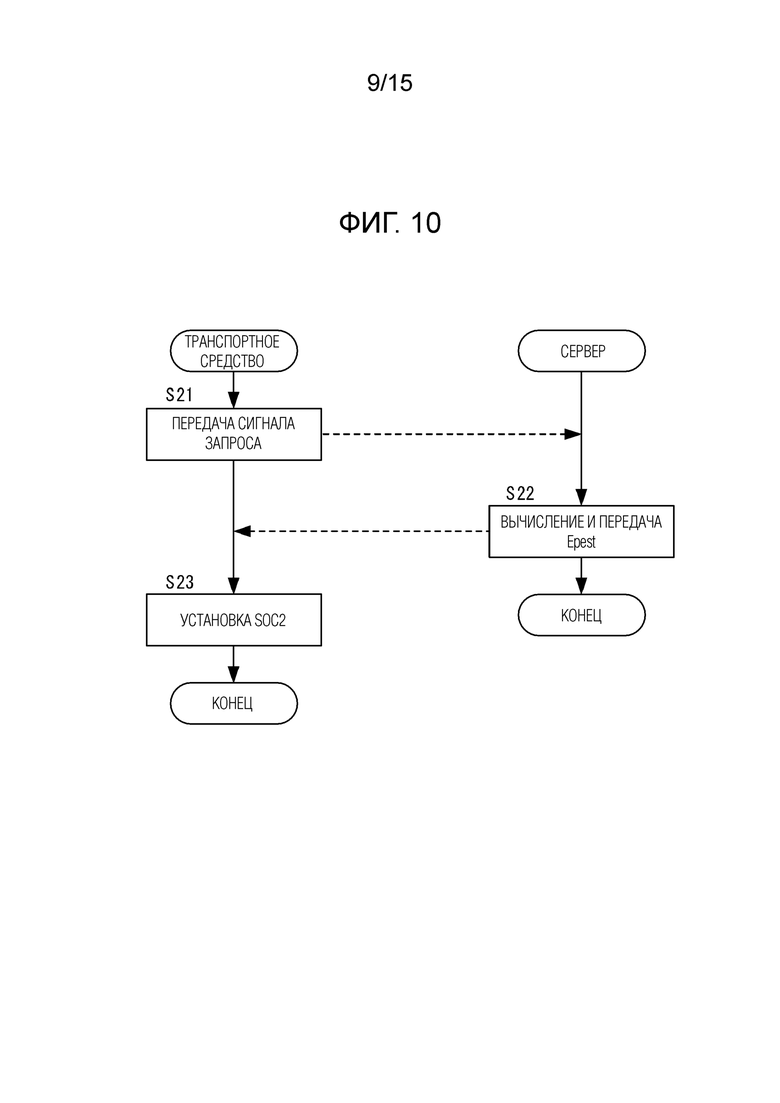
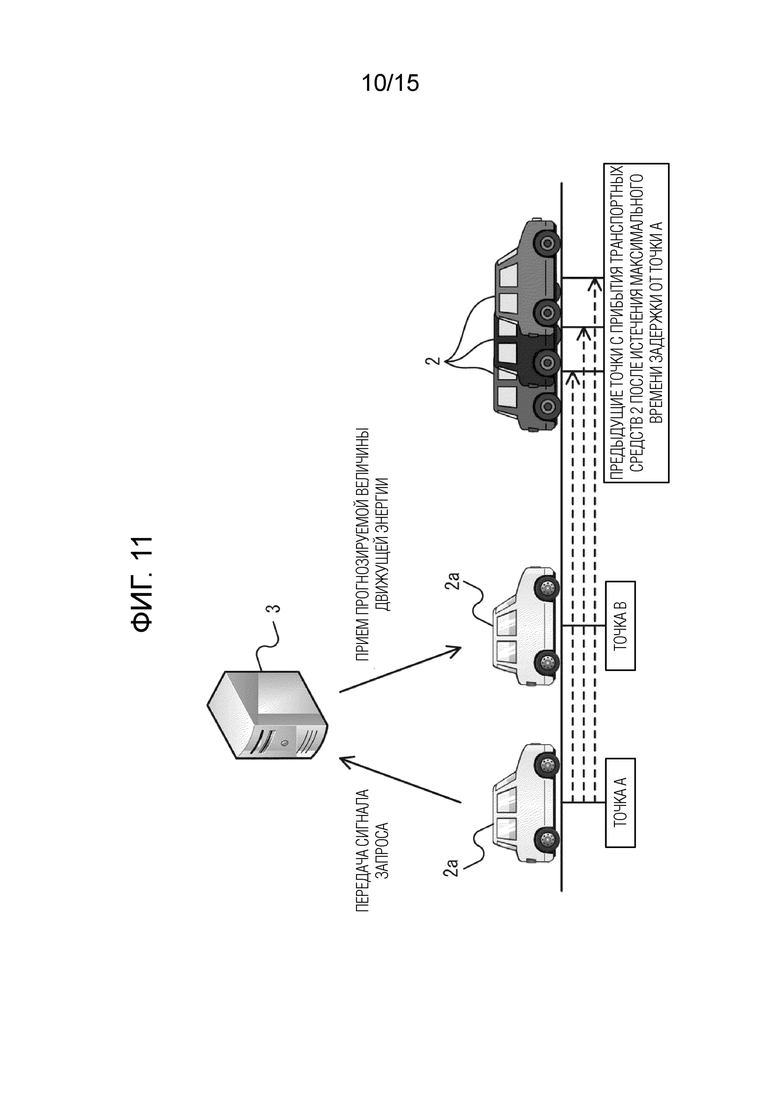
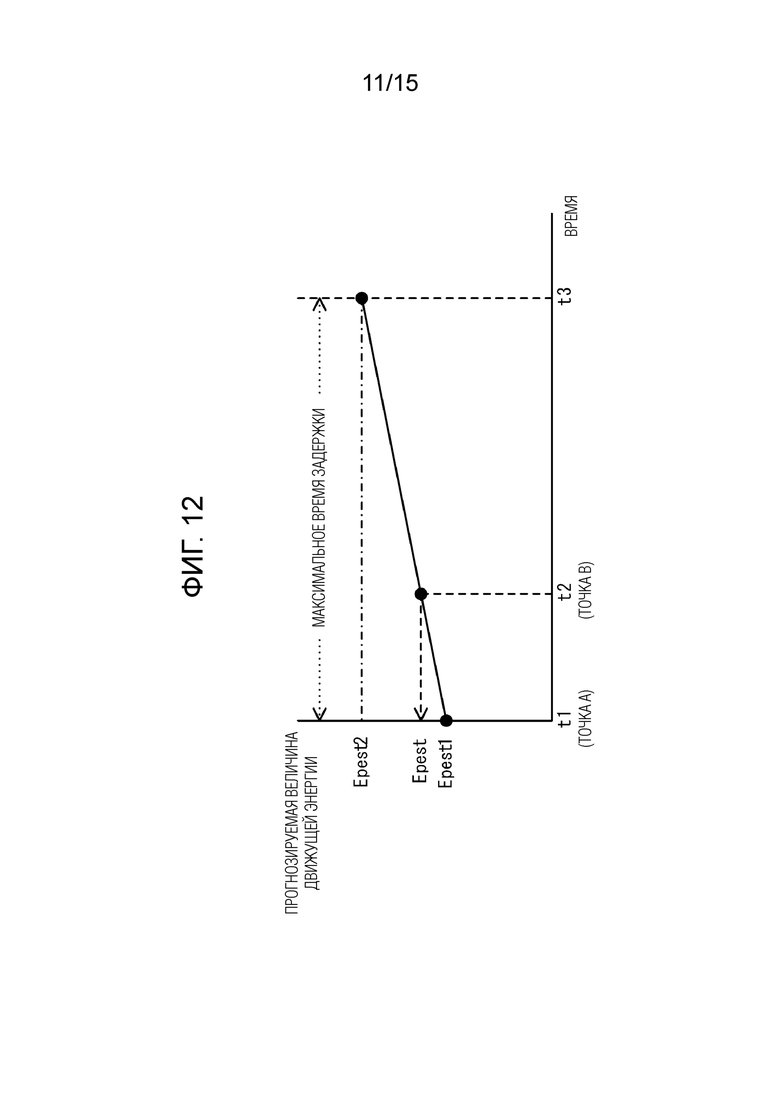
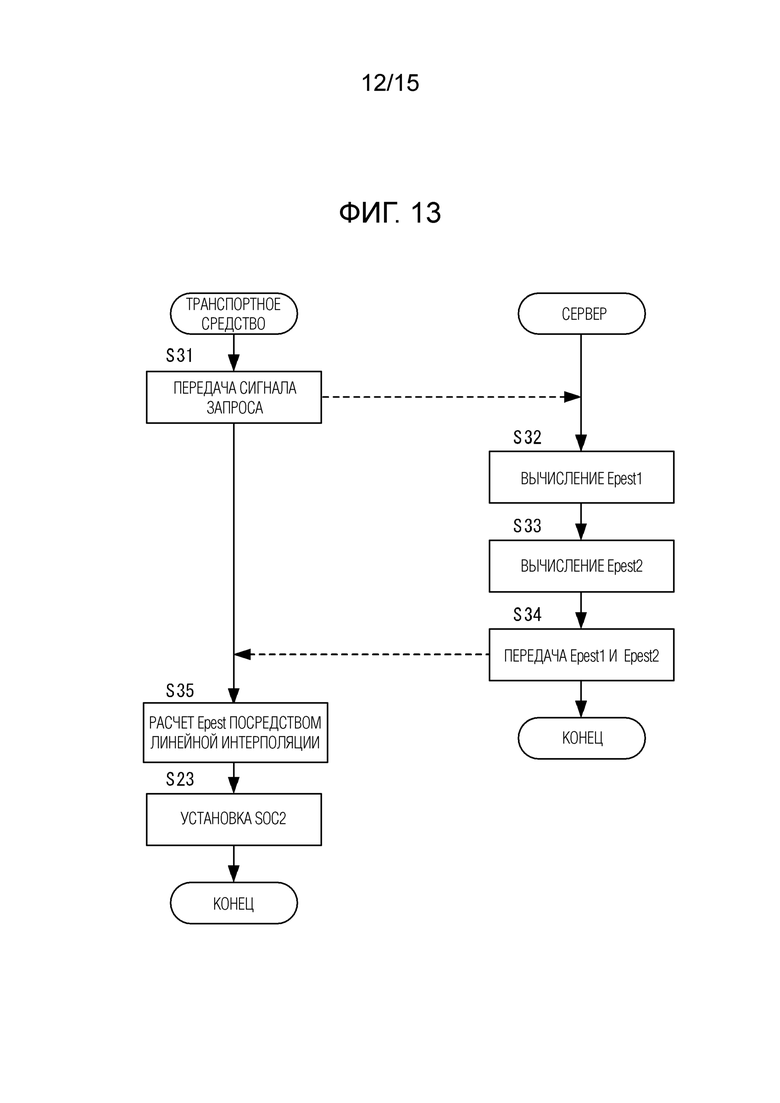
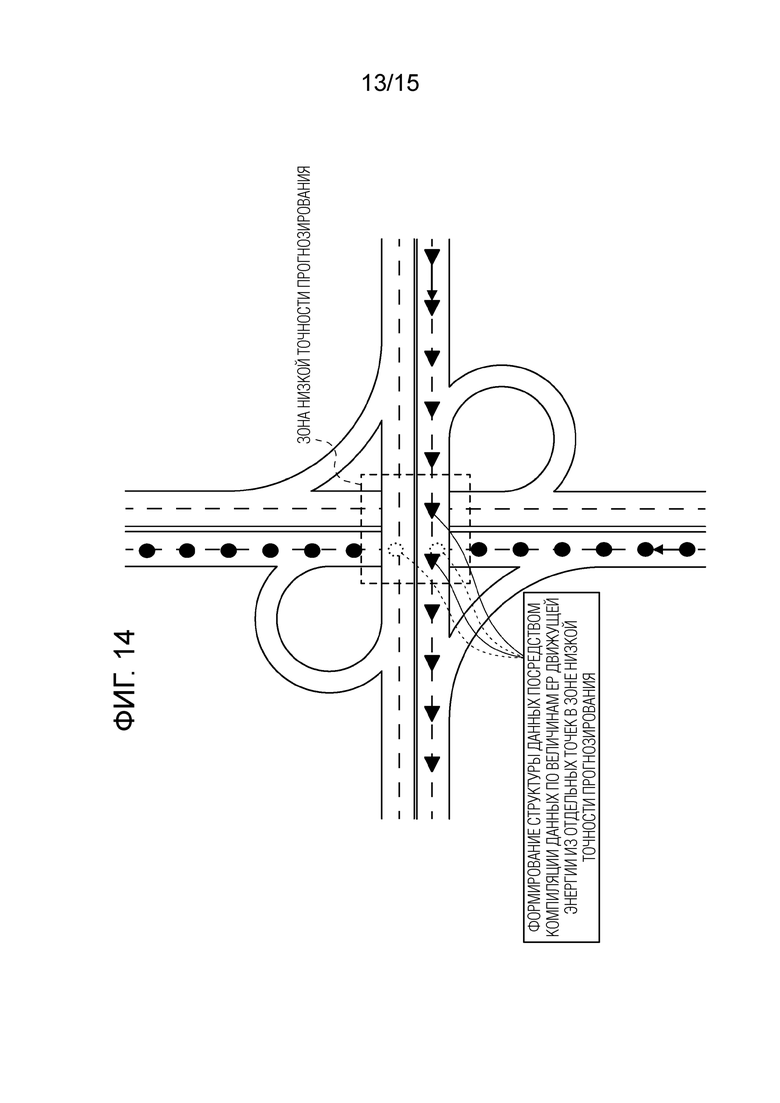
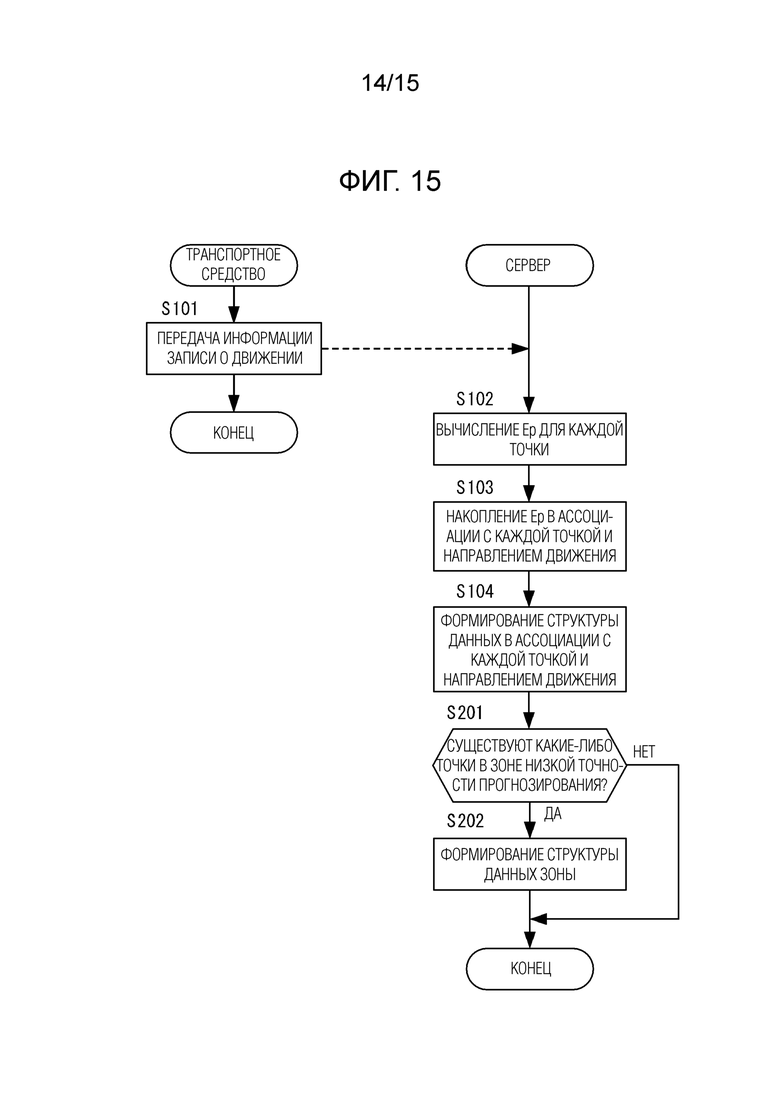
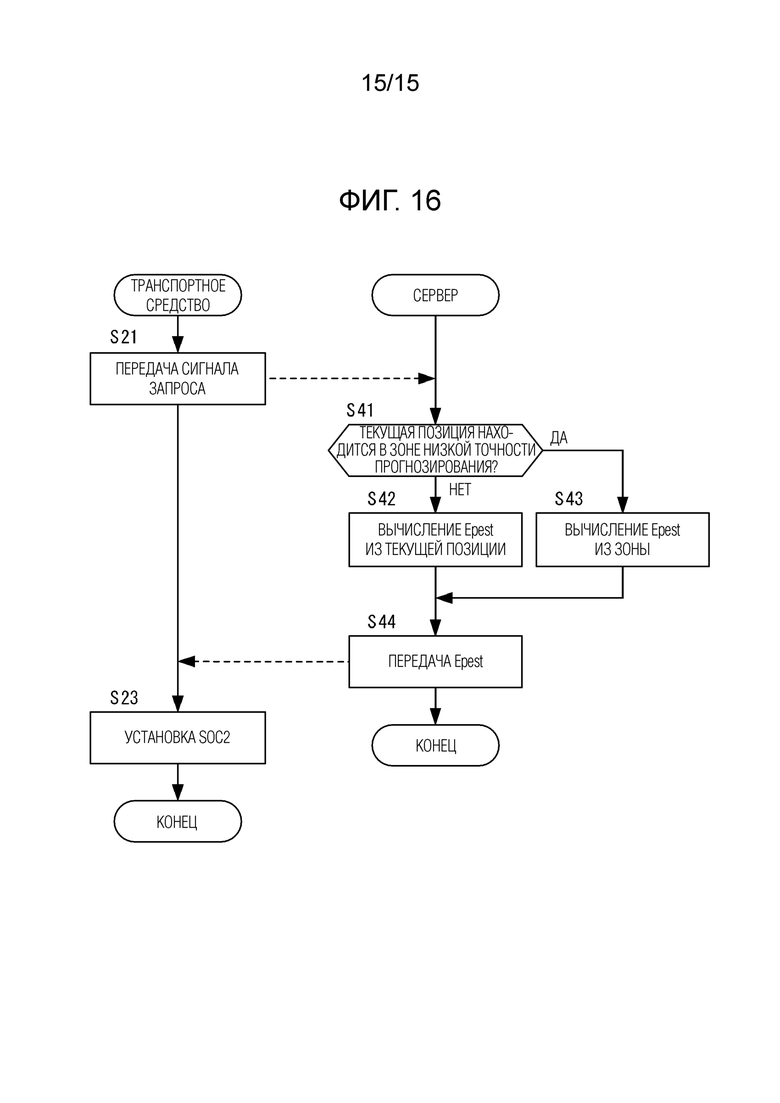
Предложен энергонезависимый носитель данных для использования в устройстве обработки информации в системе управления транспортным средством. Носитель данных хранит части позиционной информации, части информации о совокупном относительном частотном распределении, ассоциированной с отдельными направлениями движения транспортного средства. Части информации о частотном распределении относятся к данным по нагрузкам движения в точках позиционной информации о транспортных средствах, проехавших через указанные точки, или данным по величинам нагрузки движения в зависимости от времени движения или расстояния движения от указанных точек. Также носитель содержит инструкции, исполняемые посредством процессора, инструктирующие процессор вычислять прогнозируемое значение величины нагрузки движения в зависимости от времени движения или расстояния движения от произвольной точки на основе информации о совокупном относительном частотном распределении, ассоциированной с отдельными направлениями движения транспортного средства в произвольной точке. Предложены также устройство управления транспортным средством, способ генерирования структуры данных. Достигается точное прогнозирование величины движущей энергии. 3 н. и 11 з.п. ф-лы, 16 ил.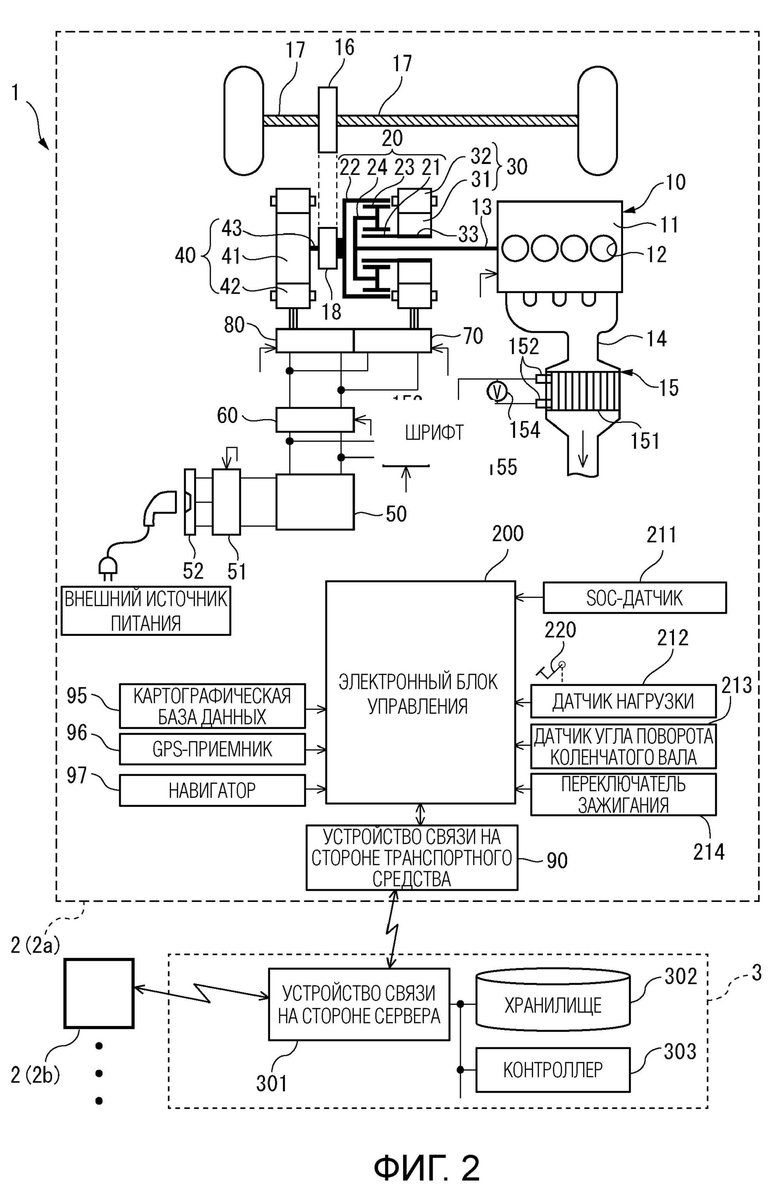
1. Энергонезависимый носитель данных для использования в устройстве обработки информации в системе управления транспортным средством, при этом носитель данных хранит:
части позиционной информации;
части информации о совокупном относительном частотном распределении, ассоциированной с отдельными направлениями движения транспортного средства, причем части информации о совокупном относительном частотном распределении относятся к данным по нагрузкам движения в точках, указанных посредством частей позиционной информации о множестве транспортных средств, проехавших через указанные точки, или данным по величинам нагрузки движения в зависимости от времени движения или расстояния движения от указанных точек; и
инструкции, которые являются исполняемыми посредством одного или более процессоров и которые инструктируют одному или более процессорам выполнять функции, включая
вычисление прогнозируемого значения величины нагрузки движения в зависимости от времени движения или расстояния движения от произвольной точки на основе информации о совокупном относительном частотном распределении, ассоциированной с отдельными направлениями движения транспортного средства в произвольной точке.
2. Носитель данных по п. 1, в котором функции дополнительно включают, когда сигнал запроса, содержащий текущую позицию и направление движения транспортного средства, принимается от транспортного средства, вычисление прогнозируемого значения величины нагрузки движения в зависимости от времени движения или расстояния движения от текущей позиции транспортного средства на основе информации о совокупном относительном частотном распределении, ассоциированной с отдельными направлениями движения транспортного средства в текущей позиции транспортного средства, и передачу прогнозируемого значения величины нагрузки движения транспортному средству, которое передало сигнал запроса.
3. Носитель данных по п. 1, дополнительно хранящий:
части второй информации о совокупном относительном частотном распределении, ассоциированной с отдельными направлениями движения транспортного средства, причем части второй информации о совокупном относительном частотном распределении относятся к данным по величинам нагрузки движения в зависимости от времени движения или расстояния движения от точек движения, где движутся транспортные средства, проехавшие через точки, указанные посредством частей позиционной информации, при этом точки движения являются точками, где транспортные средства движутся после истечения заданного максимального времени задержки связи от точек, указанных посредством частей позиционной информации;
причем функции дополнительно включают:
когда сигнал запроса, содержащий текущую позицию и направление движения транспортного средства, принимается от транспортного средства,
вычисление прогнозируемого значения первой величины нагрузки движения в зависимости от времени движения или расстояния движения от текущей позиции транспортного средства на основе информации о совокупном относительном частотном распределении, ассоциированной с отдельными направлениями движения транспортного средства в текущей позиции транспортного средства;
вычисление прогнозируемого значения второй величины нагрузки движения в зависимости от времени движения или расстояния движения от точки движения, где транспортное средство, как ожидается, должно двигаться после истечения максимального времени задержки связи, на основе второй информации о совокупном относительном частотном распределении, ассоциированной с отдельными направлениями движения транспортного средства в текущей позиции транспортного средства; и
передачу прогнозируемого значения первой величины нагрузки движения и прогнозируемого значения второй величины нагрузки движения транспортному средству, которое передало сигнал запроса.
4. Носитель данных по п. 1, дополнительно хранящий:
части третьей информации о совокупном относительном частотном распределении, относящейся к данным, полученным посредством компиляции величин нагрузки движения в зависимости от времени движения или расстояния движения от отдельных точек в предписанных зонах;
причем функции дополнительно включают вычисление, когда транспортное средство находится в одной из предписанных зон, прогнозируемого значения величины нагрузки движения в зависимости от времени движения или расстояния движения из предписанной зоны на основе третьей информации о совокупном относительном частотном распределении.
5. Носитель данных по п. 4, в котором каждая из предписанных зон является зоной, где множество дорог пересекаются на разных уровнях, зоной, где множество дорог являются соседними с различием по высоте, или зоной, где одна разветвляющаяся дорога и другая разветвляющаяся дорога являются соседними с различием по высоте.
6. Устройство управления транспортным средством, содержащее электронный блок управления, выполненный с возможностью управления транспортным средством в системе управления транспортным средством на основе прогнозируемого значения величины нагрузки движения, которое вычисляется с помощью структуры данных, используемой посредством устройства обработки информации в системе управления транспортным средством, при этом структура данных включает в себя:
части позиционной информации; и
части информации о совокупном относительном частотном распределении, ассоциированной с отдельными направлениями движения транспортного средства, причем части информации о совокупном относительном частотном распределении относятся к данным о нагрузках движения в точках, указанных посредством частей позиционной информации о множестве транспортных средств, проехавших через указанные точки, или данным о величинах нагрузки движения в зависимости от времени движения или расстояния движения от указанных точек, при этом устройство обработки информации выполнено с возможностью вычисления, с помощью структуры данных, прогнозируемого значения величины нагрузки движения в зависимости от времени движения или расстояния движения от произвольной точки на основе информации о совокупном относительном частотном распределении, ассоциированной с отдельными направлениями движения транспортного средства в произвольной точке.
7. Устройство управления транспортным средством по п. 6, в котором:
электронный блок управления выполнен с возможностью управления транспортным средством на основе прогнозируемого значения величины нагрузки движения, которое принимается от устройства обработки информации; а
устройство обработки информации выполнено с возможностью:
когда принимается сигнал запроса, содержащий текущую позицию и направление движения транспортного средства,
вычисления прогнозируемого значения величины нагрузки движения в зависимости от времени движения или расстояния движения от текущей позиции транспортного средства на основе информации о совокупном относительном частотном распределении, ассоциированной с отдельными направлениями движения транспортного средства в текущей позиции транспортного средства, и
передачи прогнозируемого значения величины нагрузки движения транспортному средству, которое передало сигнал запроса.
8. Устройство управления транспортным средством по п. 6, в котором:
транспортное средство включает в себя:
- двигатель внутреннего сгорания,
- электрически нагреваемое устройство каталитического нейтрализатора, предусмотренное в выхлопном канале двигателя внутреннего сгорания и нагреваемое посредством питания энергией, и
- заряжаемый и разряжаемый аккумулятор;
при этом электронный блок управления выполнен с возможностью установки целевого значения величины заряда аккумулятора, при котором начинается питание энергией токопроводящей подложки, на основе прогнозируемого значения величины нагрузки движения в зависимости от времени движения или расстояния движения от текущей позиции транспортного средства.
9. Устройство управления транспортным средством по п. 6, в котором:
транспортное средство включает в себя:
- двигатель внутреннего сгорания,
- устройство каталитического нейтрализатора, предусмотренное в выхлопном канале двигателя внутреннего сгорания,
- заряжаемый и разряжаемый аккумулятор, и
- тяговый мотор, приводимый в действие посредством электрической мощности аккумулятора;
причем электронный блок управления выполнен с возможностью, когда прогнозируемое значение величины нагрузки движения в зависимости от времени движения или расстояния движения от текущей позиции транспортного средства равно или превышает заданное значение, когда транспортное средство движется с помощью движущей мощности только тягового мотора, обеспечения начала зарядки аккумулятора с помощью движущей мощности двигателя внутреннего сгорания.
10. Устройство управления транспортным средством по п. 6, в котором:
транспортное средство включает в себя:
- двигатель внутреннего сгорания,
- устройство каталитического нейтрализатора, предусмотренное в выхлопном канале двигателя внутреннего сгорания,
- заряжаемый и разряжаемый аккумулятор, и
- тяговый мотор, приводимый в действие посредством электрической мощности аккумулятора;
причем электронный блок управления выполнен с возможностью, когда прогнозируемое значение величины нагрузки движения в зависимости от времени движения или расстояния движения от текущей позиции транспортного средства меньше заданного значения, и когда работает двигатель внутреннего сгорания, инструктирования транспортному средству двигаться с помощью движущей мощности только тягового мотора, в то же время останавливая двигатель внутреннего сгорания.
11. Устройство управления транспортным средством по п. 6, в котором:
прогнозируемое значение величины нагрузки движения включает в себя прогнозируемое значение первой величины нагрузки движения и прогнозируемое значение второй величины нагрузки движения;
электронный блок управления выполнен с возможностью вычисления, на основе прогнозируемого значения первой величины нагрузки движения и прогнозируемого значения второй величины нагрузки движения, величины нагрузки движения в зависимости от времени движения или расстояния движения от произвольной точки между текущей позицией транспортного средства и точкой движения, где транспортное средство, как ожидается, должно двигаться после истечения заданного максимального времени задержки связи;
структура данных дополнительно включает в себя части второй информации о совокупном относительном частотном распределении, ассоциированной с отдельными направлениями движения транспортного средства, причем части второй информации о совокупном относительном частотном распределении относятся к данным по величинам нагрузки движения в зависимости от времени движения или расстояния движения от точек движения, где движутся транспортные средства, проехавшие через точки, указанные посредством частей позиционной информации, при этом точки движения являются точками, где транспортные средства движутся после истечения максимального времени задержки связи от точек, указанных посредством частей позиционной информации;
причем устройство обработки информации выполнено с возможностью:
когда принимается сигнал запроса, содержащий текущую позицию и направление движения транспортного средства,
вычисления прогнозируемого значения первой величины нагрузки движения в зависимости от времени движения или расстояния движения от текущей позиции транспортного средства на основе информации о совокупном относительном частотном распределении, ассоциированной с отдельными направлениями движения транспортного средства в текущей позиции транспортного средства;
вычисления прогнозируемого значения второй величины нагрузки движения в зависимости от времени движения или расстояния движения от точки движения, где транспортное средство, как ожидается, должно двигаться после истечения максимального времени задержки связи, на основе второй информации о совокупном относительном частотном распределении, ассоциированной с отдельными направлениями движения транспортного средства в текущей позиции транспортного средства; и
передачи прогнозируемого значения первой величины нагрузки движения и прогнозируемого значения второй величины нагрузки движения транспортному средству, которое передало сигнал запроса.
12. Устройство управления транспортным средством по п. 11, в котором электронный блок управления выполнен с возможностью вычисления, посредством линейной интерполяции с помощью первой величины нагрузки движения и второй величины нагрузки движения, величины нагрузки движения в зависимости от времени движения или расстояния движения от произвольной точки между текущей позицией транспортного средства и точкой движения, где транспортное средство, как ожидается, должно двигаться после истечения максимального времени задержки связи.
13. Устройство управления транспортным средством по п. 12, в котором:
в линейной интерполяции,
прогнозируемое значение первой величины нагрузки движения, которое вычисляется с помощью структуры данных, используется в качестве первой величины нагрузки движения; а
прогнозируемое значение второй величины нагрузки движения, которое вычисляется с помощью структуры данных, используется в качестве второй величины нагрузки движения.
14. Способ генерирования структуры данных посредством устройства обработки информации в системе управления транспортным средством, при котором:
получают данные временного ряда для частей позиционной информации и нагрузок движения в отдельных точках, где проехало транспортное средство;
вычисляют, на основе данных временного ряда, направления движения транспортных средств, от которых получены данные временного ряда, и величины нагрузки движения транспортных средств в зависимости от времени движения или расстояния движения от отдельных точек, где получены части позиционной информации;
накапливают, в ассоциации с отдельными точками и отдельными направлениями движения, данные по вычисленным величинам нагрузки движения в зависимости от времени движения или расстояния движения от отдельных точек; и
создают, в ассоциации с отдельными точками и отдельными направлениями движения, совокупные относительные частотные распределения величин нагрузки движения в зависимости от времени движения или расстояния движения от отдельных точек на основе данных о величинах нагрузки движения, которые накапливаются в ассоциации с отдельными точками и отдельными направлениями движения.
| CN101694742A, 14.04.2010 | |||
| CN101645200A, 10.02.2010 | |||
| CN101447129A, 03.06.2009. |

