Изобретение относится к контрольно-измерительной технике и может быть использовано для удаленного измерения и контроля уровня наполнителя внутри замкнутого объема (например, уровня теплоносителя внутри реактора).
Общеизвестны радиолокационные (радарные) устройства для контроля наличия и измерения уровня твердых веществ и жидкостей в замкнутых объемах (уровнемеры). К подобным устройствам можно отнести, например, одноканальные радарные устройства, описанные в патентах US №№5136299, 6054946, 8271212, 8872694; RU №№232717, 2327958 и других. Такие радарные устройства располагаются обычно на крышах (горловинах) корпусов замкнутого объема и не предназначены для удаленного измерения и контроля уровня.
Для повышения точности, надежности и безопасности измерений используются двухканальные и многоканальные радарные уровнемеры.
Известна «Система для измерения уровня и подачи аварийных сигналов для хранилища с использованием двух измерительных устройств для определения значения текущего уровня (System for level gauging and providing alarms for a storage room using two gauging devices for determining a current level value)», описанная в патенте US №6922150, МПК G08B 21/00, опубл. 2005 г. Система состоит из радара, расположенного на крыше (горловине) контейнера и антенны, расположенной внутри контейнера. Радар формирует микроволновые лучи, которые передаются через антенну посредством волновода внутрь контейнера, отражаются от поверхности продукта в контейнере и вновь принимаются антенной. С помощью сравнения и оценки временных задержек между переданными и отраженными лучами, определяется известным образом уровень поверхности продукта в контейнере. Радар содержит первое и второе измерительные устройства, блок индикации и фидерный блок, подключенный к антенне. Каждое из измерительных устройств содержит микроволновый приемопередатчик, блок обработки и тревожный (аварийный) блок. Для повышения надежности два независимых измерительных устройства в системе используются для контроля двух разных параметров (например, изменения уровня продукта в контейнере и переполнения контейнера).
Сходными существенными признаками заявленной и вышеупомянутой системы являются: антенна, первое и второе измерительные устройства с соответствующими приемопередатчиками, фидерный блок.
Недостатком системы является необходимость размещения электронной части радара на горловине или внутри контейнера, что делает невозможным применение системы при критических условиях эксплуатации (очень высокая или низкая температура, наличие агрессивной среды, наличие радиации и т.п.), то есть отсутствует возможность обеспечения удаленного контроля уровня продукта внутри контейнера.
Известны «Метод и устройство для измерения уровня жидкости с помощью радиолокационного излучения» (Method and device for liquid level measurement by means of radar radiation), описанные в патенте US №6414625, МПК G01S 13/88, опубл. 2002 г. Устройство состоит из антенны и двух или трех радиолокационных измерительных каналов. Каждый радиолокационный измерительный канал содержит приемопередатчик и устройство индикации. Антенна может быть параболической, конической и антенной с прямой трубой. Через антенну, направленную внутрь резервуара, передаются излучаемые (прямые) и принимаются отраженные электромагнитные волны. Уровень жидкости вычисляется по временным задержкам прямых и отраженных волн. Электромагнитные волны в каждом радиолокационном измерительном канале различаются определенной характеристикой для каждой волны (например, временными параметрами, модуляцией, поляризацией и т.п.).
Сходными существенными признаками данного устройства и заявленной системы являются: антенна и два радиолокационных измерительных канала, содержащих приемопередатчики.
Недостатком устройства является отсутствие возможности обеспечения удаленного контроля уровня жидкости внутри резервуара.
Наиболее близким по технической сущности к заявленному изобретению является «Многоканальный радарный уровнемер», описанный в патенте RU №2584917, МПК G01F 23/284, Н01Q 13/00, опубл. 2015 г. Устройство, описанное в патенте, содержит резервуар с установленными на нем первым и вторым блоками электрических схем, а также фидерным блоком. Первый и второй блоки электрических схем содержат, соответственно, первую и вторую приемопередающие схемы, первую и вторую обрабатывающие схемы, и интерфейсы с линиями внешнего обмена данными. Резервуар содержит перфорированную стальную трубу и передающий линейный зонд, расположенный внутри трубы. Передающий линейный зонд проходит вглубь содержимого резервуара и выполнен с возможностью проводить электромагнитные сигналы по направлению к указанному содержимому и вглубь него и с возможностью проводить отраженные сигналы назад к первому и второму блокам электрических схем.
Общими существенными признаками с заявляемым решением являются: резервуар, блок электрических схем (для управления и обработки информации), фидерный блок, первая и вторая приемопередающие схемы (приемо-передающие модули), модуль интерфейса с линией внешнего обмена данными (линией интерфейса), перфорированная стальная труба с передающим линейным зондом.
Недостатком устройства является отсутствие возможности обеспечения удаленного контроля уровня наполнителя внутри замкнутого объема (резервуара).
Целью настоящего изобретения является обеспечение удаленного контроля уровня наполнителя внутри замкнутого объема.
Для достижения этой цели в известное техническое решение введены
новые существенные признаки, функциональные элементы и связи.
Эта цель достигнута в предложенной радиолокационной системе для удаленного контроля наполнителя внутри замкнутого объема, которая содержит корпус замкнутого объема с агрессивной средой внутри и блок электронный для управления и обработки информации, территориально удаленный от корпуса замкнутого объема на определенное расстояние, на корпусе замкнутого объема установлены фидерный блок и эквивалент нагрузки, внутри корпуса замкнутого объема расположены перфорированная стальная труба и передающий линейный зонд, выполненный с возможностью излучения электромагнитных сигналов вглубь корпуса замкнутого объема и получения отраженных электромагнитных сигналов от поверхности наполнителя, вход/выход передающего линейного зонда подключен к первому входу/выходу фидерного блока, блок электронный для управления и обработки информации содержит первый и второй приемо-передающие модули и модуль интерфейса, второй вход/выход которого подключен к линии интерфейса для связи с внешними устройствами, второй вход/выход фидерного блока связан с первым входом/выходом первого приемопередающего модуля посредством рабочего волноводного кабеля, обеспечивающего удаленную связь и проходящего через раздел опасной и безопасной сред, вход/выход эквивалента нагрузки связан с первым входом/выходом второго приемо-передающего модуля посредством опорного волноводного кабеля, обеспечивающего удаленную связь и проходящего через раздел опасной и безопасной сред, в блок электронный для управления и обработки информации введены анализатор временных интервалов, выполненный с возможностью измерения времени задержки между излучаемыми и отраженными электромагнитными сигналами в рабочем и опорном волноводных кабелях, и устранения погрешности, связанной с прохождением электромагнитных сигналов по протяженным волноводным кабелям связи, и процессор, выполненный с возможностью вычисления уровня наполнителя на основании информации, получаемой от анализатора временных интервалов, первый вход/выход анализатора временных интервалов подключен ко второму входу/выходу первого приемо-передающего модуля, второй вход/выход анализатора временных интервалов подключен ко второму входу/выходу второго приемо-передающего модуля, а его третий вход/выход подключен к первому входу/выходу процессора, второй вход/выход которого подключен к первому входу/выходу модуля интерфейса. Рабочий волноводный кабель с первым приемо-передающим модулем и опорный волноводный кабель со вторым приемо-передающим модулем по длине кабелей и выполняемым функциям являются идентичными.
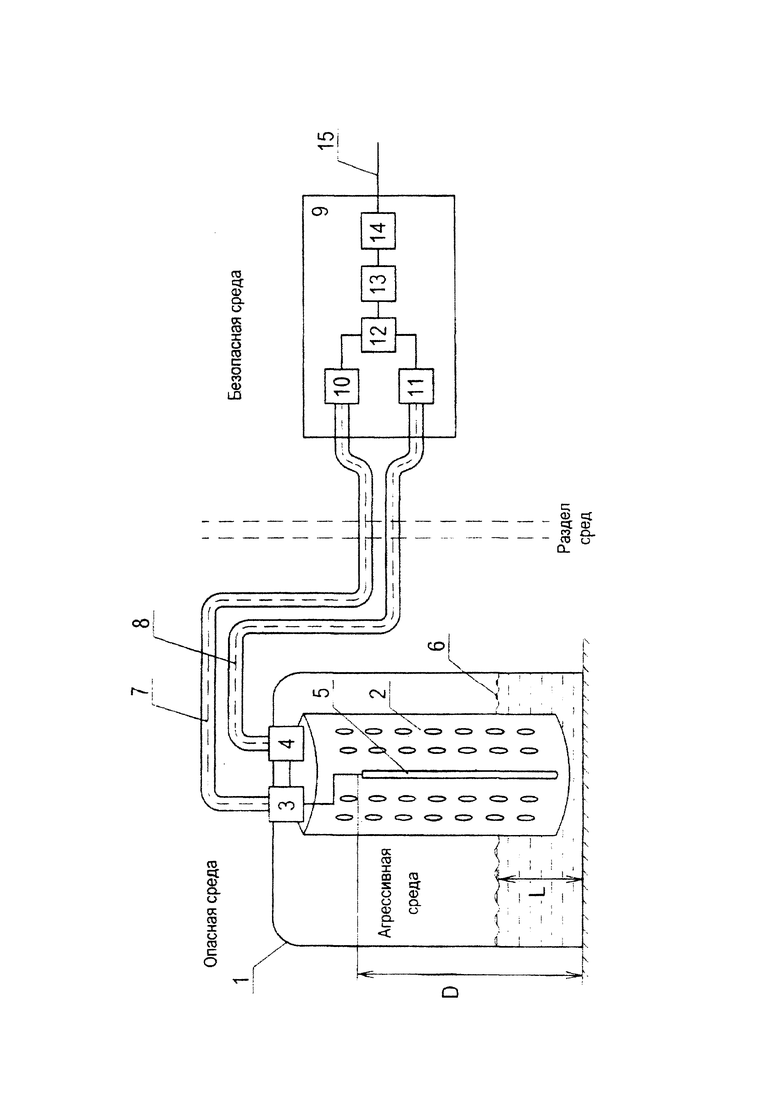
Сущность изобретения поясняется фиг.1, на которой изображено следующее.
На фиг. 1 приведена структурная схема предлагаемой системы, где введены обозначения: корпус замкнутого объема - 1, перфорированная стальная труба - 2, фидерный блок - 3, эквивалент нагрузки - 4, передающий линейный зонд- 5, наполнитель- 6, рабочий волноводный кабель- 7, опорный волноводный кабель - 8, блок электронный для управления и обработки информации- 9, первый приемо-передающий модуль- 10, второй приемо-передающий модуль- 11, анализатор временных интервалов- 12, процессор- 13, модуль интерфейса- 14, линия интерфейса- 15. На фиг. 1 показаны измеряемый уровень L и максимально возможный уровень D наполнителя 6 внутри корпуса замкнутого объема 1.
Предложенная система (фиг. 1) работает следующим образом.
Система состоит из трех частей - корпуса замкнутого объема 1 с установленными на нем фидерным блоком 3 и эквивалентом нагрузки 4, блока электронного для управления и обработки информации 9 с линией интерфейса 15 и средств связи, в качестве которых используются рабочий 7 и опорный 8 волноводные кабели. В качестве корпуса замкнутого объема 1 могут быть различные конструкции, например, резервуар, цистерна, емкость для хранения горюче-смазочных веществ, реактор, электроплавильная печь и т.п. Корпус замкнутого объема 1 наполнен жидким или расплавленным веществом, уровень которого может изменять свое положение в пространстве от измеряемого L до максимально возможного D. Внутри корпуса замкнутого объема 1 образуется агрессивная среда, характеризуемая очень опасными для человека состояниями. Это могут быть экстремальные температуры (отрицательные и положительные), ядовитые воздушно-капельные смеси, высокое или низкое давление, наличие опасных химических или биологических веществ, радиоактивное излучение, сильное электромагнитное поле, взрывоопасная среда и т.п.Особое внимание должно быть уделено контролю уровня наполнителя в реакторах с тяжелыми теплоносителями, находящимися в расплавленном виде, такими как натрий, свинцово-висмутовый сплав и свинец. За пределами корпуса замкнутого объема 1 в непосредственной к нему близости может образоваться опасная среда, характеризуемая опасными для человека состояниями, которые могут возникнуть, например, при аварийной ситуации. Опасная и безопасная для человека среды разделяются друг от друга разделом сред, граница которого показана на фиг.1. Блок электронный для управления и обработки информации 9 с линией интерфейса 15 находятся в безопасной для человека среде на большом от корпуса замкнутого объема 1 расстоянии, (например, 100-150 м). Связь блока электронного для управления и обработки информации 9 с корпусом замкнутого объема 1 осуществляется посредством рабочего 7 и опорного 8 волноводных кабелей с защищенными от опасной среды оболочками (на фиг. 1 не показаны).
Блок электронный для управления и обработки информации 9 содержит первый 10 и второй 11 приемо-передающие модули, анализатор временных интервалов 12, процессор 13, модуль интерфейса 14 и линию интерфейса 15. Первый 10 и второй 11 приемо-передающие модули обеспечивают формирование и излучение электромагнитных сигналов в виде волн ТЕМ-типа (Transverse Electro-Magnetic fields- поперечные электромагнитные поля), которые, проходя через рабочий 7 и опорный 8 волноводные кабели, направляются, соответственно, в фидерный блок 3 и эквивалент нагрузки 4. Фидерный блок 3 выполняет функцию согласования импеданса передающего линейного зонда 5 с импедансом рабочего волноводного кабеля 7, а также обеспечивает герметичность корпуса замкнутого объема 1. Эквивалент нагрузки 4 является согласующим звеном для импеданса опорного волнового кабеля 8 и обеспечивает также герметичность корпуса замкнутого объема 1. Внутри корпуса замкнутого объема 1 расположены перфорированная стальная труба 2 и передающий линейный зонд 5, выполненный с возможностью излучения электромагнитных сигналов вглубь корпуса замкнутого объема 1 и получения отраженных электромагнитных сигналов от поверхности наполнителя 6. Время задержки между излучаемыми и отраженными электромагнитными сигналами внутри корпуса замкнутого объема 1 (в пределах расстояния D) является исходной информацией для определения уровня наполнителя 6 (расстояние L). Элементы системы, расположенные внутри корпуса замкнутого объема (2, 5) и на его горловине (3, 4) являются полностью пассивными и предназначены для работы в агрессивной среде. Метод определения уровня наполнителя в корпусе замкнутого объема по излучаемым и отраженным электромагнитным сигналам является общеизвестным и описан, например, в патентах на изобретения RU №2247950, №2327958, US №7106247, №8872694 и других. Этот метод измерения справедлив при расположении излучателя электромагнитного сигнала непосредственно на горловине корпуса замкнутого объема 1. Однако, при значительном территориальном удалении излучателя от корпуса замкнутого объема и передачи электромагнитного сигнала по протяженному волноводному кабелю связи, в величине времени задержки будет возникать погрешность, связанная с прохождением электромагнитного сигнала по этому кабелю. Время задержки в этом случае будет увеличено на определенное значение (дополнительную задержку), которое будет зависетьот территориальной удаленности и волнового сопротивления волноводного кабеля связи. Для устранения погрешности измерения необходимо обеспечить компенсацию условий, вызывающих эту погрешность (дополнительную задержку). Для устранения погрешности измерения в данной заявке на изобретение предложена радиолокационная система, в которой реализованы два измерительных канала: рабочий канал (элементы 3, 7, 10) и опорный канал (элементы 4, 8, 11), предназначенный для компенсации условий прохождения электромагнитного сигнала по протяженному волноводному кабелю рабочего канала. Рабочий волноводный кабель 7 с первым приемо-передающим модулем 10 и опорный волноводный кабель 8 со вторым приемо-передающим модулем 11 по длине кабелей и выполняемым функциям должны быть идентичными. Тогда дополнительная задержка, вызванная прохождением электромагнитных сигналов по кабелям связи рабочего и опорного каналов, будет одинакова и ее можно будет определить и вычесть.
Для устранения погрешности измерения (дополнительной задержки) анализатор временных интервалов 12 выполнен с возможностью измерения времени задержки излучаемых и отраженных электромагнитных сигналов в рабочем и опорном волноводных кабелях, и устранения погрешности, связанной с прохождением электромагнитных сигналов по протяженным волноводным кабелям связи.
Для этого на первый и второй входы/выходы анализатора временных интервалов 12 поступают излучаемые и отраженные электромагнитные сигналы рабочего и опорного каналов. Анализатор временных интервалов 12 определяет временную задержку рабочего канала (измеряемая величина плюс погрешность) и, соответственно, временную задержку опорного канала (только погрешность). Вычитая из первого времени второе анализатор временных интервалов получает разностную величину времени (без погрешности), которая является исходной информацией для определения уровня наполнителя 6. Эта величина поступает на первый вход/выход процессора 13, который выполнен с возможностью вычисления уровня наполнителя (от L до D) на основании информации, получаемой от анализатора временных интервалов 12. Вычисленный уровень наполнителя с помощью модуля интерфейса 14 посредством линии интерфейса 15 передается во внешний центр сбора данных и управления.
Процессор 13 может быть выполнен с возможностью управления работой системы в целом, которая заключается в следующем:
- задание режимов работы первого и второго приемо-передающего модуля по излучению электромагнитных сигналов (мощность излучения, длительность импульса, скважность и т.п.);
- диагностический контроль (самоконтроль) работоспособности системы
- обеспечение связи с внешними устройствами посредством линии интерфейса;
- получение управляющей информации и передачи данных измерения;
- корректировка алгоритмов обработки информации в связи с изменениями условий среды;
- корректировка алгоритмов обработки информации в зависимости от положения наполнителя (устранении нелинейности в измерениях);
- сигнализация о критических ситуациях внутри корпуса замкнутого объема.
Дополнительными функциями процессора 13 могут быть:
- метрологическая калибровка;
- получение информации от метеостанции или от датчиков физических величин (при необходимости);
- корректировка алгоритмов обработки информации, связанная с временем эксплуатации системы (старение и износ механизмов).
Работа системы характеризуется самостоятельностью принятия решений при выполнении вышеизложенных функций, так как доступ управляющего персонала внутрь замкнутого объема невозможен или значительно ограничен. Для обеспечения работы системы процессор 13 может быть выполнен с возможностью реализации алгоритмов функционирования в виде нейросетевых алгоритмов.
Использование волноводных кабелей 7 и 8, проходящих через границу раздела двух сред (опасной и безопасной), позволяет обеспечить в том числе электрическую взрывобезопасность системы, с видом взрывозащиты, например, «искробезопасная цепь».
Действующий лабораторный макет предлагаемой системы подвергался испытаниям, в результате которых была подтверждена устойчивая работоспособность и высокая точность измерения уровня наполнителя. Протяженность средств связи составляла примерно 110 метров.
В качестве анализатора временных интервалов 12 и процессора 13 использовались цифровые унифицированные программные приемники СБИС 1879 ВЯ1Я производства ЗАО НТЦ «Модуль». В качестве первого 10 и второго 11 приемо-передающих модулей использовались цифровые вычислительные синтезаторы 1508ПЛ8Т производства АО НПЦ «Элвис». В качестве рабочего 7 и опорного 8 волноводных кабелей использовались кабели типа PKS0-3-35.
Введенные в известную систему дополнительные признаки и функциональные связи позволяют придать предлагаемой системе новые существенные свойства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Радиолокационная станция кругового обзора | 2018 |
|
RU2691129C1 |
| Многофункциональная малогабаритная радиолокационная система для летательных аппаратов | 2016 |
|
RU2630278C1 |
| МНОГОКАНАЛЬНЫЙ РАДАРНЫЙ УРОВНЕМЕР | 2011 |
|
RU2584917C2 |
| АНТЕННА | 2022 |
|
RU2785970C1 |
| СПОСОБ И УСТРОЙСТВО ПОДПОВЕРХНОСТНОГО РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ | 2005 |
|
RU2303279C1 |
| РАДИОФОТОННАЯ СИСТЕМА ЛОКАЦИИ ДЛЯ ОПРЕДЕЛЕНИЯ СКОРОСТИ ОТЦЕПОВ НА СОРТИРОВОЧНОЙ ГОРКЕ | 2023 |
|
RU2812744C1 |
| Интеллектуальная система для удаленного контроля положения рабочего органа внутри замкнутого пространства | 2016 |
|
RU2628867C1 |
| АВТОМАТИЧЕСКАЯ НРЛС С УВЕЛИЧЕННЫМ НЕОБСЛУЖИВАЕМЫМ ПЕРИОДОМ АВТОНОМНОЙ РАБОТЫ | 2012 |
|
RU2522910C2 |
| РАДИОЛОКАЦИОННЫЙ МОДУЛЬ И ИЗВЕЩАТЕЛИ ОХРАНЫ НА ЕГО ОСНОВЕ | 2009 |
|
RU2406154C1 |
| АНТЕННА | 2023 |
|
RU2806708C1 |
Изобретение относится к контрольно-измерительной технике, в частности к радиолокационным системам. Система содержит корпус замкнутого объема с агрессивной средой внутри и блок электронный для управления и обработки информации, территориально удаленный от корпуса замкнутого объема на определенное расстояние. На корпусе замкнутого объема установлены фидерный блок и эквивалент нагрузки, внутри корпуса замкнутого объема расположены перфорированная стальная труба и передающий линейный зонд, выполненный с возможностью излучения электромагнитных сигналов вглубь корпуса замкнутого объема и получения отраженных электромагнитных сигналов от поверхности наполнителя. Блок электронный для управления и обработки информации содержит первый и второй приемо-передающие модули, анализатор временных интервалов, процессор и модуль интерфейса с линией интерфейса. Фидерный блок и эквивалент нагрузки связаны, соответственно, с первым и вторым приемо-передающими модулями посредством рабочего и опорного волноводных кабелей, обеспечивающих удаленную связь и проходящих через раздел опасной и безопасной сред. Анализатор временных интервалов выполнен с возможностью измерения времени задержки между излучаемыми и отраженными электромагнитными сигналами в рабочем и опорном волноводных кабелях и устранения погрешности, связанной с прохождением электромагнитных сигналов по протяженным волноводным кабелям связи. Процессор выполнен с возможностью вычисления уровня наполнителя на основании информации, получаемой от анализатора временных интервалов. Достигаемым техническим результатом изобретения является обеспечение удаленного измерения и контроля уровня наполнителя внутри замкнутого объема (например, уровня теплоносителя внутри реактора). 1 з.п. ф-лы, 1 ил.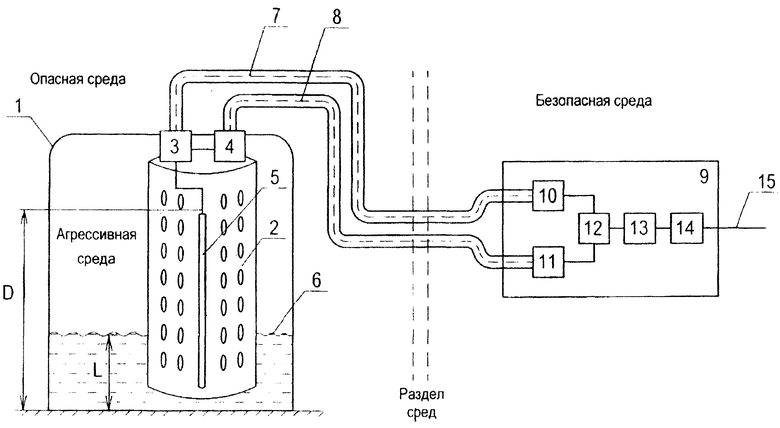
1. Радиолокационная система для удаленного контроля уровня наполнителя внутри замкнутого объема, содержащая корпус замкнутого объема с агрессивной средой внутри и блок электронный для управления и обработки информации, территориально удаленный от корпуса замкнутого объема на определенное расстояние, на корпусе замкнутого объема установлены фидерный блок и эквивалент нагрузки, внутри корпуса замкнутого объема расположены перфорированная стальная труба и передающий линейный зонд, выполненный с возможностью излучения электромагнитных сигналов вглубь корпуса замкнутого объема и получения отраженных электромагнитных сигналов от поверхности наполнителя, вход/выход передающего линейного зонда подключен к первому входу/выходу фидерного блока, блок электронный для управления и обработки информации содержит первый и второй приемопередающие модули и модуль интерфейса, второй вход/выход которого подключен к линии интерфейса для связи с внешними устройствами, отличающаяся тем, что второй вход/выход фидерного блока связан с первым входом/выходом первого приемо-передающего модуля посредством рабочего волноводного кабеля, обеспечивающего удаленную связь и проходящего через раздел опасной и безопасной сред, вход/выход эквивалента нагрузки связан с первым входом/выходом второго приемо-передающего модуля посредством опорного волноводного кабеля, обеспечивающего удаленную связь и проходящего через раздел опасной и безопасной сред, в блок электронный для управления и обработки информации введены анализатор временных интервалов, выполненный с возможностью измерения времени задержки между излучаемыми и отраженными электромагнитными сигналами в рабочем и опорном волноводных кабелях и устранения погрешности, связанной с прохождением электромагнитных сигналов по протяженным волноводным кабелям связи, и процессор, выполненный с возможностью вычисления уровня наполнителя на основании информации, получаемой от анализатора временныхинтервалов, первый вход/выход анализатора временных интервалов подключен ко второму входу/выходу первого приемо-передающего модуля, второй вход/выход анализатора временных интервалов подключен ко второму входу/выходу второго приемо-передающего модуля, а его третий вход/выход подключен к первому входу/выходу процессора, второй вход/выход которого подключен к первому входу/выходу модуля интерфейса.
2. Система по п. 1, отличающаяся тем, что рабочий волноводный кабель с первым приемо-передающим модулем и опорный волноводный кабель со вторым приемо-передающим модулем по длине кабелей и выполняемым функциям являются идентичными.
| МНОГОКАНАЛЬНЫЙ РАДАРНЫЙ УРОВНЕМЕР | 2011 |
|
RU2584917C2 |
| US 6414625 B1, 02.07.2002 | |||
| РАДИОЛОКАЦИОННЫЙ ЗАПРОСЧИК | 2002 |
|
RU2234109C1 |
| WO 2016085731 A1, 02.06.2016. | |||

