Изобретение относится к области измерительной техники, в частности к оптическим установкам измерения элементов внутреннего ориентирования и дисторсии объективов и может быть использовано для калибровки оптико-электронных аппаратов (ОЭА) космического базирования, предназначенных для дистанционного зондирования Земли в целях изучения природных ресурсов, а также создания и обновления топографических карт масштаба до M 1:25000.
Известны способ и устройство для калибровки аэрофотоаппаратов [1], которые по сущности наиболее близки к предлагаемому изобретению и выбраны в качестве прототипа. Известный способ калибровки аэрофотоаппаратов заключается в том, что сначала ориентируют калибрируемый аэрофотоаппарат до совмещения изображения марки коллиматора с центром прикладного стекла - кадра аэрофотоаппарата. Последовательно проецируют марку коллиматора в заданные точки кадра путем поворота коллиматора. Для каждого положения коллиматора измеряют угол поворота коллиматора угломерным приспособлением, определяют координаты изображения марки в кадре и сохраняют полученные данные. После прохождения всех заданных точек кадра, используя все сохраненные данные, рассчитывают фокусное расстояние объектива аэрофотоаппарата, координаты главной точки кадра и дисторсию объектива в заданных точках кадра.
Совмещение марки коллиматора с метками сетки прикладного стекла калибруемого аппарата производится визуально с помощью окуляра. Отсчет показаний угломерных приспособлений производится механически.
Известное устройство для калибровки аэрофотоаппаратов включает коллиматор, содержащий марку с подсветкой и окуляр, которые оптически связаны посредством светоделительного элемента с объективом. Возможность поворота коллиматора обеспечивается тем, что он жестко закреплен на раме, установленной на пространственном шарнире, на осях которого расположены угломерные приспособления. Коллиматор имеет возможность оптической связи с калибруемым аппаратом. Калибруемый оптико-электроннный аппарат снабжен прикладным стеклом с сеткой меток, расположенным в фокальной плоскости его объектива, закреплен на станине и остается при измерениях неподвижным.
С помощью прототипа может быть произведена калибровка сравнительно небольшого по габаритам аэрофотоаппарата. Однако с увеличением габаритов калибрируемого аппарата увеличивается расстояние между его входным зрачком и выходным зрачком коллиматора. В связи с этим известный способ не может обеспечить высокую точность калибровки крупногабаритного оптико-электронного аппарата, а известное устройство приобретает громоздкость и большие размеры. Прототип также имеет недостаточно высокую точность измерения углов и определения значений фокусного расстояния объектива, координат главной точки кадра и дисторсии объектива аэрофотоаппарата в заданных точках кадра для данного класса аппаратуры, что связано с неточностью визуального совмещения марки коллиматора с метками сетки прикладного стекла, погрешностью измерения координат меток сетки, методикой механического отсчета показаний измерительных приборов, наличием биений в осях рамы.
Задачей изобретения является повышение точности калибровки крупногабаритного оптико-электронного аппарата космического базирования при относительно небольших размерах устройства для калибровки.
Для решения поставленной задачи в способе, заключающемся в том, что ориентируют оптико-электронный аппарат до совмещения изображения марки с центром кадра ОЭА, последовательно проецируют марку коллиматора в заданные точки кадра ОЭА путем изменения положения коллиматора, для каждого положения коллиматора измеряют угол поворота коллиматора угломерным приспособлением, определяют координаты изображения марки в кадре и сохраняют полученные данные, после прохождения всех заданных точек кадра рассчитывают фокусное расстояние объектива оптико-электронного аппарата, координаты главной точки кадра и дисторсию объектива в заданных точках кадра, в отличие от прототипа изменение положения коллиматора при проецировании марки коллиматора в заданные точки кадра оптико-электронного аппарата осуществляется путем поворота коллиматора и его линейного перемещения, для каждого положения коллиматора дополнительно определяют и сохраняют систематические погрешности положения визирной оси коллиматора относительно осей Χ, Y, Z, при этом расчет фокусного расстояния объектива ОЭА, координат главной точки кадра и дисторсии объектива в заданных точках кадра осуществляют с учетом всех сохраненных данных, переворачивают калибруемый оптико-электронный аппарат на 180° вокруг горизонтальной оси и проводят все перечисленные действия для данного положения, усредняют значения фокусного расстояния объектива ОЭА, координат главной точки кадра и дисторсии объектива в заданных точках кадра, полученные в результате измерений в двух положениях ОЭА.
Для решения поставленной задачи в устройстве, содержащем стол установочный для размещения калибруемого оптико-электронного аппарата, угломерное приспособление, коллиматор, установленный с возможностью оптической связи с калибруемым оптико-электронным аппаратом и содержащий оптически связанные марку с подсветкой, светоделительный элемент и объектив, при этом коллиматор имеет возможность поворота, в отличие от прототипа для обеспечения поворота коллиматор снабжен двумя полуосями, образующими единую горизонтальную ось, установленными в подшипниках корпуса, закрепленного на каретке, при этом каретка имеет возможность перемещения по двум вертикальным направляющим, каждая из которых закреплена на пилоне, установленном на плите-основании, в качестве угломерного приспособления использован датчик угла поворота, который закреплен на первой полуоси, коллиматор дополнительно содержит фотоприемник, оптически связанный посредством ранее указанного светоделительного элемента с объективом. Устройство содержит систему контроля визирной оси, включающую указанный коллиматор и жестко закрепленные перед его объективом зеркало автоколлимационное и уголковый отражатель, систему контроля положения корпуса, включающую двустороннее зеркало, базовое зеркало, два цифровых автоколлиматора, две светоделительные призмы, два уровня электронных, при этом каждый цифровой автоколлиматор оптически связан с первой рабочей поверхностью двустороннего зеркала и базовым зеркалом посредством соответствующей светоделительной призмы, причем двустороннее зеркало и первый уровень электронный закреплены на корпусе, базовое зеркало и второй уровень электронный закреплены на столе установочном, а автоколлиматоры и соответствующие им светоделительные призмы закреплены на стойке, жестко установленной на плите-основании между корпусом и столом установочным, систему контроля биения оси, включающую цифровой автоколлиматор, оптически связанный с зеркалом и со второй рабочей поверхностью двустороннего зеркала посредством светоделительной призмы, при этом цифровой автоколлиматор и светоделительная призма закреплены на корпусе, а зеркало закреплено на второй полуоси коллиматора, систему проверки датчика угла поворота, включающую оптически связанные цифровой автоколлиматор и призму многогранную, при этом цифровой автоколлиматор закреплен на корпусе, а призма многогранная закреплена на первой полуоси коллиматора, причем основание многогранной призмы перпендикулярно полуоси коллиматора.
Зеркало, базовое зеркало, двустороннее зеркало расположены перпендикулярно плите-основанию.
Все цифровые автоколлиматоры, уровни электронные, фотоприемник и датчик угла поворота электрически связаны с компьютером.
Использование в способе калибровки при проецировании марки коллиматора в заданные точки кадра оптико-электронного аппарата не только поворота коллиматора вокруг горизонтальной оси, но и его линейного перемещения вдоль вертикальной оси позволило проводить калибровку крупногабаритного оптико-электронного аппарата при относительно небольших размерах устройства.
Использование в устройстве системы контроля положения корпуса позволило провести контроль отклонения визирной оси коллиматора вследствие его перемещения вдоль вертикальной оси. Наличие системы контроля биения оси позволило провести контроль отклонения визирной оси коллиматора вследствие его поворота относительно горизонтальной оси. Введение системы контроля визирной оси позволило контролировать отклонения визирной оси коллиматора вследствие деформации корпуса коллиматора при его повороте. Учет всех этих систематических погрешностей положения визирной оси коллиматора относительно осей Χ, Υ, Ζ в определении фокусного расстояния объектива оптико-электронного аппарата, координат главной точки кадра и дисторсии объектива в заданных точках кадра, наличие системы проверки датчика угла поворота, которая дает возможность определять величину среднеквадратической погрешности измерения углов поворота коллиматора, а также усреднение значений фокусного расстояния объектива ОЭА, координат главной точки кадра и дисторсии объектива в заданных точках кадра, полученных в прямом и перевернутом на 180° вокруг горизонтальной оси положении калибрируемого ОЭА, позволило проводить калибровку крупногабаритного оптико-электронного аппарата с высокой точностью.
Изобретение поясняется чертежами: на фиг. 1 приведен общий вид устройства для калибровки крупногабаритного оптико-электронного аппарата, на фиг. 2 приведена оптическая схема устройства.
Устройство для калибровки оптико-электронного аппарата (фиг. 1), содержит плиту-основание 1, на которой расположен стол установочный 2 для размещения калибруемого оптико-электронного аппарата 3, а также вертикально закреплено базовое зеркало 4 и уровень электронный прецизионный 5. Напротив стола установочного 2 размещен коллиматор 6 с двумя полуосями: первой 7 и второй 8, установленными в прецизионных подшипниках 9 корпуса 10, закрепленного на каретке 11, которая имеет возможность перемещения по вертикальным прецизионным призматическим направляющим 12 вдоль двух чугунных литых пилонов 13, установленных на плите-основании 1. На первой полуоси 7 коллиматора 6 установлены датчик угла поворота 14 и призма многогранная 15, закрепленная перпендикулярно ей, а на второй полуоси 8 коллиматора 6 перпендикулярно ей закреплено зеркало 16. На корпусе 10 закреплены цифровой автоколлиматор 17 для контроля биения оси, цифровой автоколлиматор 18 для калибровки датчика угла поворота 14, двухстороннее зеркало 19, вертикально закрепленное, уровень электронный прецизионный 20 и светоделительная призма 21.
Между столом установочным 2 и корпусом 10 на плите-основании 1 установлена стойка 22, на которой укреплены два цифровых автоколлиматора 23, 24 и две светоделительные призмы 25, 26 для контроля положения коллиматора 6. Все цифровые автоколлиматоры 17, 18, 23, 24, уровни электронные 5, 20 и датчик угла поворота электрически связаны с компьютером.
Коллиматор 6 состоит из марки 27 с подсветкой 28 и фотоприемника на основе ПЗС-матрицы 29, оптически связанных посредством светоделительного элемента 30 с объективом 31. В качестве подсветки 28 используется лазерный диод. Фотоприемник 29 электрически связан с компьютером.
Система контроля визирной оси коллиматора 6 (фиг. 1, фиг. 2) включает коллиматор 6 и жестко закрепленные на нем перед объективом 31 уголковый отражатель 32 и зеркало автоколлимационное 33.
Система контроля положения корпуса 10 (фиг. 1, фиг. 2) включает два уровня электронных прецизионных 5 и 20, двустороннее зеркало 19, базовое зеркало 4, два параллельных оптических канала, каждый из которых содержит цифровой автоколлиматор 23, 24 и светоделительную призму 25, 26, причем каждый цифровой автоколлиматор 23, 24 оптически связан с первой рабочей поверхностью двустороннего зеркала 19 и базовым зеркалом 4 посредством одной светоделительной призмы 25, 26. Использование двух параллельных оптических каналов дает возможность уменьшить длину двустороннего зеркала 19. При перемещении корпуса 10 вверх работает верхний цифровой автоколлиматор 23, при перемещении корпуса 10 вниз - нижний 24.
Система контроля биения оси (фиг. 1, фиг. 2) включает цифровой автоколлиматор 17, и светоделительную призму 21, зеркало 16 и двустороннее зеркало 19, причем цифровой автоколлиматор 17 оптически связан с зеркалом 16 и со второй рабочей поверхностью двустороннего зеркала 19 посредством светоделительной призмы 21.
Система проверки датчика угла поворота 14 (фиг. 1, фиг. 2) включает цифровой автоколлиматор 18 и призму многогранную 15, причем цифровой автоколлиматор 18 оптически связан с призмой многогранной 15. В качестве датчика угла поворота 14 использован интерференционный угловой энкодер.
Перед началом калибровки производят проверку датчика угла поворота 14. Для этого поворачивают горизонтальную ось вместе с коллиматором 6 до тех пор, пока блик от ближайшей грани призмы многогранной 15 не попадет в центр поля зрения автоколлиматора 18, который передает изображение блика в компьютер, где программа вычисляет угловую координату zk1 блика и сохраняет в памяти компьютера. Одновременно с этим датчик угла поворота 14 передает значение угла поворота uk1 горизонтальной оси в память компьютера. Далее горизонтальную ось поворачивают в ту же сторону до тех пор, пока в центр поля зрения автоколлиматора 18 не попадет блик от следующей грани призмы многогранной 15, вычисляют и записывают в память компьютера угловую координату следующего блика Zk2 и показания датчика угла поворота uk2. Процедуру повторяют для всех граней призмы многогранной 15.
Вычисляют величину среднеквадратической погрешности mu измерений датчика угла поворота:
где dui=uki-(zki+ϕni) - погрешности измерений датчика угла поворота,
 - постоянная составляющая,
- постоянная составляющая,
i=1…N - номер грани призмы многогранной, N - число граней призмы многогранной, ϕni - значение угла между гранями призмы (паспортная величина).
Если величина среднеквадратической погрешности mu не превышает соответствующее значение из паспорта датчика угла поворота, делается заключение о соответствии показаний датчика угла поворота классу точности, необходимому при калибровке оптико-электронного аппарата.
При калибровке установка работает следующим образом: коллиматор 6 устанавливают в горизонтальное положение, каретку 11 устанавливают в среднее положение и включают подсветку 28 коллиматора 6. На стол установочный 2 устанавливают калибрируемый оптико-электронный аппарат 3 и производят его ориентирование до положения, при котором параллельный пучок света подсветки 28 коллиматора 6, пройдя через объектив ОЭА 3, попадает на ПЗС-матрицу фотоприемника ОЭА 3 и в центре ПЗС-матрицы получают изображение марки 27 коллиматора 6, при этом ПЗС-матрица формирует кадр ОЭА и передает его в компьютер. На дисплее будет отображаться марка 27 в центре кадра ОЭА.
Затем ориентируют ОЭА 3 так, чтобы при повороте коллиматора 6 и перемещении каретки 11 изображение марки 27 на мониторе перемещалось по всей длине кадра строго вертикально посередине.
В компьютер вводятся необходимые для калибровки параметры: номинальное значение фокусного расстояния ОЭА 3, паспорт фокальной плоскости, определяющий точное положение ПЗС матрицы в фокальной плоскости ОЭА 3, модель сканирования, содержащую информацию о величинах угла поворота коллиматора 6 и перемещения каретки 11 для проецирования марки коллиматора в заданную точку кадра и количестве заданных точек.
Программа, используя данные модели сканирования, выдает величину угла поворота коллиматора 6 и величину перемещения каретки 11 соответствующим исполнительным механизмам, которые выполняют поворот и перемещение.
После окончания перемещения коллиматора 6 датчик угла поворота 14 измеряет величину угла поворота коллиматора uэ. и отправляет ее в память компьютера.
Проводят контроль положения визирной оси коллиматора относительно осей Χ, Y, Z, используя для этого систему контроля положения корпуса, систему биения оси и систему контроля визирной оси.
С помощью системы контроля положения корпуса определяют систематическую погрешность, связанную с отклонением от прямолинейного перемещения каретки по вертикальным направляющим. При этом цифровые автоколлиматоры 23 или 24 (в зависимости от того, в чьем поле зрения находится двухстороннее зеркало 19) посредством светоделительных призм 25 или 26 регистрируют автоколлимационное измерительное изображение марки автоколлиматора после отражения света от первой рабочей поверхности двухстороннего зеркала 19, перемещаемого одновременно с корпусом, и одновременно регистрируют опорное изображение марки автоколлиматора после отражения света от неподвижно закрепленного на столе установочном базового зеркала 4, передают в компьютер, где программа рассчитывает их координаты bx и by, bxo и byo, соответственно. Систематическая погрешность определяется как разность между координатами измерительного изображения и опорного и сохраняется в памяти компьютера.
Уровень электронный 5, неподвижно закрепленный на столе установочном, измеряет опорную величину угла наклона стола установочного 2 u2z относительно горизонта. Уровень электронный 20, перемещаемый одновременно с корпусом 10, определяет измерительную величину угла наклона корпуса u1z. Эти величины передают в компьютер, где программа рассчитывает разность между измерительной и опорной величинами, которая определяет систематическую погрешность, и сохраняют в памяти компьютера.
С помощью системы биения оси определяют систематическую погрешность, связанную с биением оси в подшипниках 9 корпуса 10. При этом цифровой автоколлиматор 17 регистрирует автоколлимационное измерительное изображение марки автоколлиматора после отражения света от зеркала 16, закрепленного на полуоси коллиматора 8 и одновременно регистрирует опорное изображение марки автоколлиматора после отражения света от второй рабочей поверхности двухстороннего зеркала 19, передает в компьютер, где программа рассчитывает их координаты az и ау, azo и ауо, соответственно. Систематическая погрешность определяется как разность между координатами измерительного изображения и опорного и сохраняется в памяти компьютера.
С помощью системы контроля визирной оси определяют систематическую погрешность, связанную с изменением направления визирной оси коллиматора вследствие деформации коллиматора при его повороте. При этом фотоприемник 29 коллиматора 6 регистрирует автоколлимационное опорное изображение марки 27 коллиматора 6 после отражения света от уголкового отражателя 32 и одновременно регистрирует измерительное изображение марки 27 коллиматора 6 после отражения света от зеркала автоколлимационного 33, передает в компьютер, где программа рассчитывает их координаты Х0 и Y0, Хи и Yи фокальной плоскости коллиматора, соответственно. Систематическая погрешность определяется как разность между координатами измерительного изображения и опорного и сохраняется в памяти компьютера.
После этого производят проецирование марки 27 коллиматора 6 в зрачок объектива калибруемого оптико-электронного аппарата 3, для чего: включают подсветку 28 коллиматора 6, получают изображение марки 27 на ПЗС матрице калибрируемого ОЭА, полученный кадр ОЭА передают в компьютер для обработки, подсветка 28 коллиматора отключается. Программа обрабатывает полученный кадр ОЭА и рассчитывает координаты изображения марки в данной точке кадра в системе координат фокальной плоскости ОЭА xf и yf.
После этого переходят к следующему перемещению коллиматора, поворачивая коллиматор вокруг горизонтальной оси и перемещая вертикально каретку с последующим проецированием марки 27 коллиматора в следующую точку кадра ОЭА. Проводят весь описанный цикл измерений для этого положения. Если все перемещения согласно модели сканирования уже проведены (пройдены все заданные точки кадра), заканчивают калибровку.
Для каждой заданной точки кадра ОЭА программа рассчитывает с учетом показаний всех систем контроля: углы отклонения визирной оси:
где fk - номинальное фокусное расстояние коллиматора;
компоненты вектора V визирной оси:
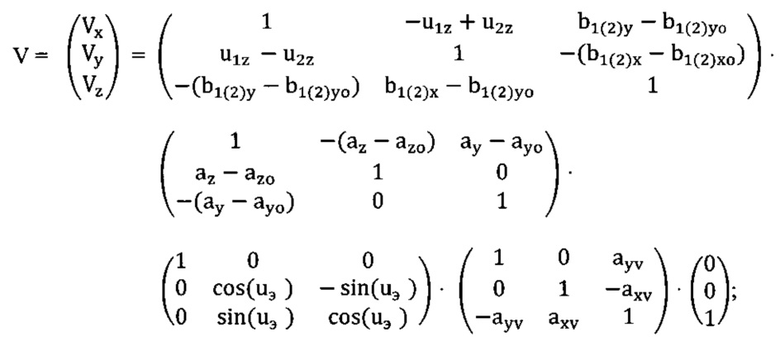
невязки:
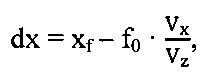
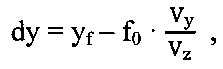
где f0 - номинальное фокусное расстояние объектива калибруемого оптико-электронного аппарата и сохраняет полученные данные.
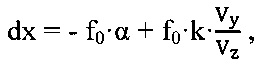
Используя полученные и сохраненные данные, вычисляют поправки к фокусному расстоянию δf, в положение главной точки δу вдоль длинной стороны кадра (вдоль оси Y фокальной плоскости) и углы ориентации α, w, k калибруемого ОЭА относительно системы координат установки, решая систему уравнений методом наименьших квадратов

Вводят поправки в значения фокусного расстояния объектива f=f0+δf и положения главной точки кадра у=у0+δу, где у0 - номинальная координата главной точки кадра.
Рассчитывают дисторсию объектива, используя уже вычисленные значения δf, δу, α, w, k:

Переворачивают калибруемый оптико-электронный аппарат на 180° вокруг горизонтальной оси и проводят все перечисленные действия и расчеты для данного положения.
Усредняют значения фокусного расстояния объектива, координаты главной точки кадра и дисторсии объектива ОЭА в заданных точках кадра, полученные в результате измерений в двух положениях ОЭА.
Значения элементов внутреннего ориентирования f, у и дисторсии dist х и dist у объектива вносятся в паспорт объектива калибруемого оптико-электронного аппарата и используются при наземной обработке полученных изображений.
В отличие от прототипа предлагаемое изобретение позволяет проводить калибровку крупногабаритного оптико-электронного аппарата космического базирования, обеспечивает высокую точность измерения углов (менее 0,1''), позволяет определять дисторсию объектива со средней квадратической погрешностью менее 0,1'', а элементов внутреннего ориентирования с точностью, обеспечивающей преобразование данных фотосъемки в координаты объектов с погрешностью менее 0,1''.
Предлагаемые способ и устройство могут быть использованы также для калибровки ОЭА с удаленным зрачком.
Источник информации
1. SU 519678 А1 (Военно-инженерная ордена Ленина краснознаменная академия им. В.В. Куйбышева). 1976.06.30.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство определения астрономического азимута | 2023 |
|
RU2800187C1 |
| Способ высокоточной калибровки дисторсии цифровых видеоканалов | 2018 |
|
RU2682588C1 |
| ДАТЧИК УГЛА ПОВОРОТА | 2017 |
|
RU2644994C1 |
| ЦИФРОВОЙ ДВУХКООРДИНАТНЫЙ ДИНАМИЧЕСКИЙ АВТОКОЛЛИМАТОР | 2008 |
|
RU2437058C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЙ ИЗОБРАЖЕНИЯ МАРКИ В ЦИФРОВЫХ АВТОКОЛЛИМАТОРАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2773278C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛА СКРУЧИВАНИЯ | 2011 |
|
RU2467285C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ПОВОРОТА ОБЪЕКТА И ДВУХКООРДИНАТНЫЙ АВТОКОЛЛИМАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2024 |
|
RU2828450C1 |
| Способ измерения углов,образуемых тремя гранями призмы,и устройство для его осуществления | 1985 |
|
SU1250848A1 |
| ТЕОДОЛИТ | 2001 |
|
RU2209392C1 |
| АВТОКОЛЛИМАТОР ДЛЯ ИЗМЕРЕНИЯ УГЛА СКРУЧИВАНИЯ | 2008 |
|
RU2384811C1 |
Способ калибровки оптико-электронного аппарата, который реализуется соответствующим устройством, заключается в том, что ориентируют оптико-электронный аппарат (ОЭА) до совмещения изображения марки коллиматора с центром кадра ОЭА, последовательно проецируют марку коллиматора в заданные точки кадра ОЭА путем поворота и линейного перемещения коллиматора. Для каждого положения коллиматора измеряют угол его поворота, определяют координаты изображения марки в кадре и систематические погрешности положения визирной оси коллиматора относительно осей X, Y, Z. Рассчитывают фокусное расстояние объектива, координаты главной точки кадра и дисторсию объектива в заданных точках кадра. Переворачивают калибруемый ОЭА и действия повторяют. Усредняют значения фокусного расстояния объектива, координат главной точки кадра и дисторсии объектива, полученные в двух положениях ОЭА. Технический результат заключается в повышении точности калибровки оптико-электронного аппарата. 2 н.п. ф-лы, 2 ил.
1. Способ калибровки оптико-электронного аппарата, заключающийся в том, что ориентируют оптико-электронный аппарат до совмещения изображения марки коллиматора с центром кадра оптико-электронного аппарата, последовательно проецируют марку коллиматора в заданные точки кадра оптико-электронного аппарата путем изменения положения коллиматора, для каждого положения коллиматора измеряют угол его поворота угломерным приспособлением, определяют координаты изображения марки в кадре и сохраняют полученные данные, после прохождения всех заданных точек кадра рассчитывают фокусное расстояние объектива оптико-электронного аппарата, координаты главной точки кадра и дисторсию объектива в заданных точках кадра, отличающийся тем, что изменение положения коллиматора при проецировании марки коллиматора в заданные точки кадра осуществляют путем его поворота и линейного перемещения, для каждого положения коллиматора дополнительно определяют и сохраняют систематические погрешности положения визирной оси коллиматора относительно осей X, Y, Z, при этом расчет фокусного расстояния объектива оптико-электронного аппарата, координат главной точки кадра и дисторсии объектива в заданных точках кадра осуществляют с учетом всех сохраненных данных, переворачивают калибруемый оптико-электронный аппарат на 180° вокруг горизонтальной оси и проводят все перечисленные действия для данного положения, усредняют значения фокусного расстояния объектива оптико-электронного аппарата, координат главной точки кадра и дисторсии объектива в заданных точках кадра, полученные в результате измерений в двух положениях оптико-электронного аппарата.
2. Устройство для калибровки оптико-электронного аппарата, содержащее стол установочный для размещения калибруемого оптико-электронного аппарата, угломерное приспособление, коллиматор, установленный с возможностью оптической связи с калибруемым оптико-электронным аппаратом и содержащий марку с подсветкой, которая оптически связана посредством светоделительного элемента с объективом, при этом коллиматор имеет возможность поворота, отличающееся тем, что для обеспечения поворота коллиматор снабжен двумя полуосями, образующими единую горизонтальную ось, установленными в подшипниках корпуса, закрепленного на каретке, при этом каретка имеет возможность перемещения по двум вертикальным направляющим, каждая из которых закреплена на пилоне, установленном на плите-основании, в качестве угломерного приспособления использован датчик угла поворота, который закреплен на первой полуоси, коллиматор дополнительно содержит фотоприемник, оптически связанный посредством ранее указанного светоделительного элемента с объективом и вместе с зеркалом автоколлимационным и уголковым отражателем, жестко закрепленными перед объективом коллиматора, образует систему контроля визирной оси, дополнительно содержит систему контроля положения корпуса, включающую двустороннее зеркало, базовое зеркало, два цифровых автоколлиматора, две светоделительные призмы, два уровня электронных, каждый цифровой автоколлиматор оптически связан с первой рабочей поверхностью двустороннего зеркала и базовым зеркалом посредством соответствующей светоделительной призмы, причем двустороннее зеркало и первый уровень электронный закреплены на корпусе, базовое зеркало и второй уровень электронный закреплены на столе установочном, а автоколлиматоры и соответствующие им светоделительные призмы закреплены на стойке, жестко установленной на плите-основании между корпусом и столом установочным, систему контроля биения оси, включающую цифровой автоколлиматор оптически связанный с зеркалом и со второй рабочей поверхностью двустороннего зеркала посредством светоделительной призмы, при этом цифровой автоколлиматор и светоделительная призма закреплены на корпусе, а зеркало закреплено на второй полуоси коллиматора, систему проверки датчика угла поворота, включающую оптически связанные цифровой автоколлиматор и призму многогранную, при этом цифровой автоколлиматор закреплен на корпусе, а призма многогранная закреплена на первой полуоси коллиматора, причем основание многогранной призмы перпендикулярно полуоси коллиматора, зеркало, базовое зеркало, двустороннее зеркало расположены перпендикулярно плите-основанию, все цифровые автоколлиматоры, уровни электронные, фотоприемник и датчик угла поворота электрически связаны с компьютером.
| Прибор для калибровки аэрофотоаппаратов | 1974 |
|
SU519678A1 |
| СПОСОБ КАЛИБРОВКИ ДИСТОРСИИ ОПТИКО-ЭЛЕКТРОННОГО УСТРОЙСТВА | 2006 |
|
RU2321888C1 |
| WO 2004092826 A1, 28.10.2004 | |||
| CN 103940590 A, 23.07.2014. | |||

