ОБЛАСТЬ ТЕХНИКИ
[001] Настоящее изобретение относится к редактированию медицинских изображений, и в частности к устройству для редактирования медицинских изображений, системе для медицинской визуализации, способу редактирования медицинской трехмерной (3D) модели поверхности, элементу компьютерной программы и к компьютерочитаемому носителю информации.
УРОВЕНЬ ТЕХНИКИ
[002] Редактирование медицинских изображений, например сегментация медицинских изображений, представляет собой процедуру работы с информацией, предоставляемой медицинскими изображениями. Оно играет важную роль в хирургическом планировании и моделировании, рентгенологическом планировании, а также отслеживании прогрессирования заболевания. При редактировании медицинских изображений используют компьютеры для обеспечения, например, автоматической сегментации изображений. WO 2007/034425 A3 относится к способу адаптации геометрической модели к данным об изображении с использованием многочисленных частичных преобразований. Однако для обеспечения точности и достоверности, особенно для медицинских изображений с низкой контрастностью, шумом и другими неоднозначностями визуализации, редактирование медицинских изображений, выполняемое обученным медицинским персоналом, таким как специалист в области лучевой диагностики, может стать утомительным.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[003] Может существовать необходимость в улучшенной технологии, облегчающей процесс редактирования медицинских изображений.
[004] Задача настоящего изобретения достигается объектом изобретения по независимым пунктам формулы изобретения, в которой дополнительные варианты реализации включены в зависимые пункты формулы изобретения. Следует отметить, что описанные далее аспекты настоящего изобретения также применимы для устройства для редактирования медицинских изображений, системе для медицинской визуализации, способу редактирования медицинской 3D модели поверхности, элементу компьютерной программы и компьютерочитаемому носителю информации.
[005] В соответствии с настоящим изобретением, предложено устройство для редактирования медицинских изображений, содержащее процессорный блок, блок вывода и блок интерфейса. Процессорный блок выполнен с возможностью обеспечения трехмерной (3D) модели поверхности анатомической структуры исследуемого объекта. 3D модель поверхности содержит множество подучастков поверхности. Каждый подучасток поверхности содержит ряд вершин. Каждой вершине присвоено значение ранжирования. Процессорный блок выполнен с возможностью идентифицирования по меньшей мере одной вершины из вершин, находящихся рядом с определенной исследуемой точкой, в качестве целевой вершины. Идентифицирование основано на функции измеренного расстояния приближенности к исследуемой точке и присвоенном значении ранжирования.
[006] В качестве преимущества, настоящее изобретение облегчает поиск и захват целевой вершины 3D модели поверхности, например, опорной вершины в наборе вершин, подлежащих преобразованию, пользователем, например, медицинским работником. Идентифицирование целевой вершины основано на измеренном расстоянии приближенности и присвоенном значении ранжирования. Это обеспечивает пользователю возможность захвата целевой вершины без особого труда во время редактирования в средстве 3D просмотра, даже когда просмотру на средстве 3D просмотра с сеткой мешает помеха. Подобным образом, в средствах двумерного (2D) отображения с контурами, даже когда целевая вершина не видна на текущей плоскости просмотра, но лежит перед или за ней, пользователь по-прежнему может легко ее захватить. Это уменьшает ручные манипуляции на этапе диалогового редактирования и, следовательно, автоматизирует рабочий процесс.
[007] В качестве примера, значение ранжирования связано с различными категориями ранжирования, содержащими по меньшей мере одну категорию из следующей группы: образование угла, пребывание в качестве части стыка, степень относительной кривизны и анатомическое значение.
[008] В качестве еще одного примера, процессорный блок выполнен с возможностью обеспечения 2D медицинского изображения исследуемого объекта, а также с возможностью накладывания 2D представления среза 3D модели поверхности на 2D медицинское изображение в качестве комбинированного 2D изображения. 2D представление и 2D медицинское изображение совмещены друг с другом. Кроме того, процессорный блок выполнен с возможностью указания соответствующей исследуемой точки на комбинированном 2D изображении. Кроме того, процессорный блок выполнен с возможностью обеспечения модификации также путем смещения указанной соответствующей точки на комбинированном 2D изображении.
[009] В соответствии с настоящим изобретением, также обеспечивается система для медицинской визуализации, содержащая устройство для получения медицинских изображений и устройство для редактирования медицинских изображений, в соответствии с одним из вышеуказанных примеров. Устройство для получения медицинских изображений выполнено с возможностью обеспечения данных об изображении для модификации 3D модели поверхности.
[0010] В соответствии с настоящим изобретением, также обеспечивается способ редактирования медицинской 3D модели поверхности, включающий следующие этапы:
a) Обеспечение 3D модели поверхности анатомической структуры исследуемого объекта. 3D модель поверхности содержит множество подучастков поверхности. Каждый подучасток поверхности содержит ряд вершин, и каждой вершине присвоено значение ранжирования.
b) Определение исследуемой точки на визуальном представлении 3D модели поверхности путем взаимодействия пользователя.
c) Идентифицирование по меньшей мере одной вершины из вершин, находящихся рядом с определенной исследуемой точкой, в качестве целевой вершины. Идентифицирование основано на функции измеренного расстояния приближенности к исследуемой точке и присвоенном значении ранжирования.
d) Модификация 3D модели поверхности путем смещения целевой вершины путем взаимодействия пользователя, выполняемого вручную.
[0011] В качестве примера, этап с) включает выбор целевой по меньшей мере одной вершины в качестве точки модификации 3D модели поверхности путем взаимодействия пользователя.
[0012] В качестве примера, на этапе с) обеспечивают пороговое значение приближенности. Идентифицирование включает идентифицирование вершин в пределах порогового значения приближенности для определенного положения.
[0013] В качестве еще одного примера, на этапе с) идентифицирование осуществляют автоматически в виде функции автоматической привязки (функции «auto-snap») 3D модели поверхности.
[0014] В качестве еще одного примера, перед этапом с), пользователь может выбрать одну или более категорий ранжирования, подлежащих использованию для идентифицирования на этапе с).
[0015] В качестве еще одного примера, на этапе а), присвоенное значение ранжирования содержит присвоенную числовую метку, относящуюся к подучасткам поверхности в зависимости от связанной категории. После этапа b) обеспечивают b1) выбор числовой метки для идентифицирования, а на этапе с) обеспечивают подэтап c1) идентифицирования целевой вершины соответствующей числовой меткой.
[0016] В качестве еще одного примера, на этапе а) присвоенные значения ранжирования содержат присвоенную анатомическую метку, относящуюся к подучасткам поверхности в зависимости от связанной категории. После этапа b) обеспечивают b1) определение анатомической метки для произведенного идентифицирования; а на этапе с) обеспечивают подэтап b1) идентифицирования целевой вершины соответствующей анатомической меткой.
[0017] В качестве еще одного примера, этап с) дополнительно включает: c3) отображение идентифицированной целевой вершины. Идентифицированную целевую вершину визуально выделяют. Этап d) дополнительно включает:
[0018] d1) отображение модифицированной 3D модели поверхности.
[0019] В качестве еще одного примера, на этапе а) дополнительно обеспечивают следующее: a1) обеспечение 2D медицинского изображения исследуемого объекта и а2) накладывание 2D представления среза 3D модели поверхности на 2D медицинское изображение в качестве комбинированного 2D изображения. 2D представление и 2D медицинское изображение совмещены друг с другом. На этапе b) соответствующую исследуемую точку указывают на комбинированном 2D изображении; а на этапе d) модификацию также обеспечивают путем смещения указанной соответствующей точки на комбинированном 2D изображении.
[0020] В настоящем изобретении термин «медицинская 3D модель поверхности» относится к модели анатомической структуры, относящейся к конкретному органу, или общей форме исследуемых участков, которые могут соответствовать исследуемому лечению лучевой терапией, например, форме опухоли, подлежащей лечению облучением.
[0021] Термин «3D модель поверхности» относится к геометрическому представлению трехмерной (3D) структуры или объема посредством применения его поверхности или внешнего контура. Например, 3D модель поверхности определена, как набор многоугольников, описывающих поверхность. Многоугольники могут быть треугольниками и могут быть представлены гибкой сеткой треугольной формы.
[0022] 3D модель поверхности может быть предоставлена в виде базовой структурной модели, которую затем адаптируют под ситуацию с пациентом путем взаимодействия пользователя. Кроме того, 3D модель поверхности может быть предоставлена в виде предварительно адаптированной модели пациента, которую затем дополнительно адаптируют для соответствия текущей ситуации. В качестве примера, 3D модель поверхности может быть использована в качестве образца, например, для магнитно-резонансной (MP) сегментации головного мозга человека.
[0023] Термин «исследуемый объект» или «исследуемая область» относится к анатомической структуре пациента, которая может соответствовать различным классам тканей, органам, патологиям или другим биологически релевантным структурам. Таким образом, объектом может быть, например, головной мозг, сердце, легкие, печень, артерии сетчатки и даже клеточные структуры, такие как нейроны и хромосомы. Кроме того, термин «исследуемый объект» может относиться к патологическим областям пациента, таким как раковые области, опухолевые области, деформации ткани и поражения рассеянным склерозом.
[0024] Термин «вершина (вершины)» относится к набору точек, соединенных путем связывания линий или поверхностей. В случае 3D модели поверхности, представленной набором многоугольников, вершины представляют собой массив точек в трехмерном пространстве, соединяющих многоугольники и их края.
[0025] Термин «подучасток» относится к части или фрагменту структуры или объема, т.е. части или области 3D модели поверхности.
[0026] Термин «значение ранжирования» относится к присвоенному или связанному значению, используемому для дополнительного выбора путем применения ранжирования с целью предоставления выбора.
[0027] Определение исследуемой точки и последующего идентифицирования вершины также может называться выбором пространственного расположения (модели), предоставляя в результате выбранное положение.
[0028] Следовательно, термин «выбранное положение» может относиться к положению непосредственно на 3D модели поверхности, например, на 3D треугольной сетке поверхности объекта. Кроме того, термин «выбранное положение» может относиться к положению на заданном срезе изображения с наложенным плоскостным контуром геометрической модели (см. ниже).
[0029] Термин «приближенность» относится к относительному расстоянию между определенной точкой и вершиной, т.е. расстоянию от точки до точки.
[0030] Следует отметить, что для настоящего изобретения не обязательно наличие пациента или медицинского изображения, поскольку оно применимо к 3D модели поверхности.
[0031] В соответствии с аспектом, обеспечивается характеристика приложения для редактирования изображений, представляющая собой автоматическую привязку, например, сегментация на основании модели с использованием модели поверхности, ограниченной формой. На основании выбранного пользователем положения на 3D модели поверхности, например, путем щелчка манипулятором-мышью, выполненного пользователем, целевую(ые) вершину(ы), т.е. вершину(ы), подлежащую(ие) преобразованию, идентифицируют не только по их расстоянию до выбранной точки, но также по их индивидуальным свойствам. К индивидуальным свойствам могут относиться локальные свойства сетки, такие как связанность, т.е. стыки, или криволинейность, т.е. углы. Кроме того, к индивидуальным свойствам могут относиться анатомическое значение положения вершины, в том числе, например, стандартный ориентир, такой как передняя комиссура на томограммах головного мозга, или медицинское или физиологическое значение, например, вершины части повреждения. Данный подход также может быть рассмотрен в качестве функциональности «привязка к опорной вершине». Идентифицированная целевая вершина может быть использована в качестве базовой вершины для деформаций сетки, которая может быть «захватывающей», «тянущей», «локально изгибающейся» или «передвигающейся».
[0032] Эти и другие аспекты настоящего изобретения станут очевидны и будут объяснены со ссылкой на вариант(ы) реализации, описанный(е) в представленном ниже описании.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0033] Иллюстративные варианты реализации настоящего изобретения будут описаны далее со ссылкой на следующие чертежи, на которых:
[0034] на фиг. 1 показан пример базовых этапов способа редактирования медицинской 3D модели поверхности;
[0035] на фиг. 2 показан пример 3D модели поверхности;
[0036] на фиг. 3 показан еще один пример способа;
[0037] на фиг. 4 еще один другой пример способа;
[0038] на фиг. 5 показан еще один пример способа;
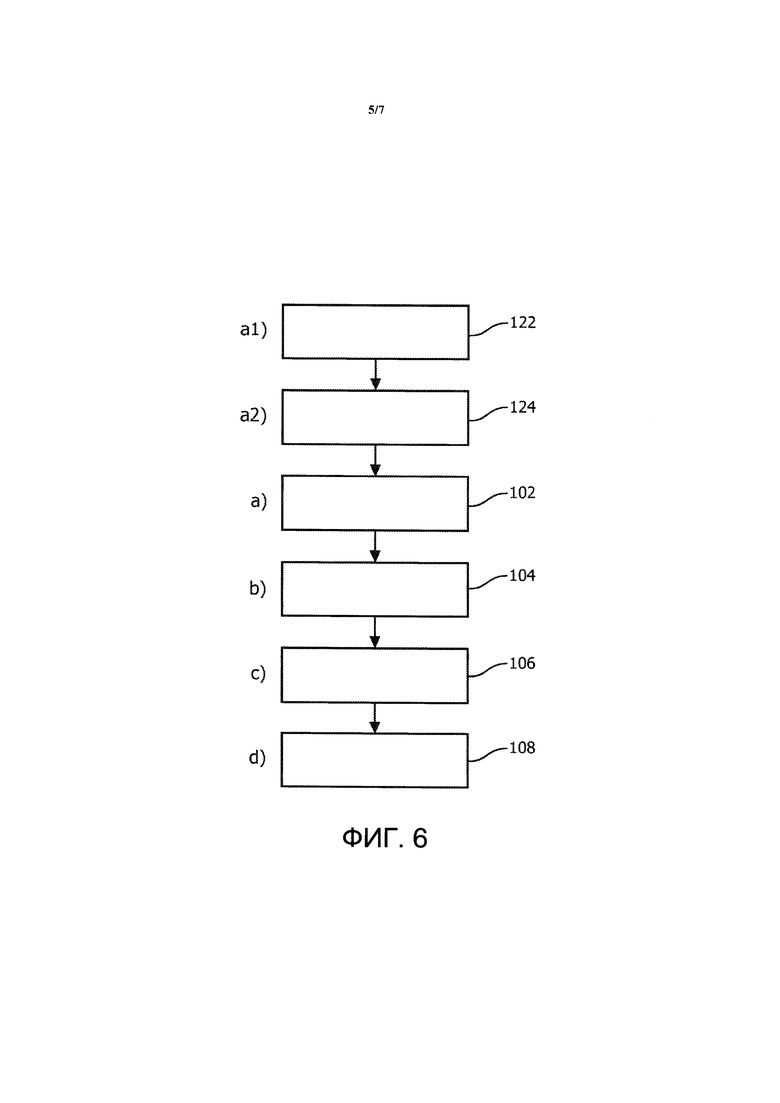
[0039] на фиг. 6 еще один другой пример способа;
[0040] на фиг. 7 показан пример операции редактирования модели по фиг. 6;
[0041] на фиг. 8 показано устройство для редактирования медицинских изображений, в соответствии с примером; и
[0042] на фиг. 9 показана система для медицинской визуализации, в соответствии с примером.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0043] На фиг. 1 показаны базовые этапы способа 100 редактирования медицинской 3D модели поверхности. Способ 100 включает следующие этапы:
[0044] - на первом этапе 102, также называемом этапом а), предоставляют 3D модель 12 поверхности анатомической структуры исследуемого объекта. 3D модель 12 поверхности содержит множество подучастков 14 поверхности. Каждый подучасток 14 поверхности содержит ряд вершин 16. Каждой вершине 16 присвоено значение 18 ранжирования.
[0045] - на втором этапе 104, также называемом этапом b), определяют исследуемую точку 20 на визуальном представлении 3D модели 12 поверхности путем взаимодействия пользователя.
[0046] - на третьем этапе 106, также называемом этапом с), идентифицируют по меньшей мере одну вершину из вершин, находящихся рядом с определенной исследуемой точкой 20, в качестве целевой вершины 22. Идентифицирование основано на функции измеренного расстояния 23 приближенности к исследуемой точке 20 и присвоенном значении 18 ранжирования.
[0047] - на четвертом этапе 108, также называемом этапом d), 3D модель 12 поверхности модифицируют путем смещения целевой вершины 22 путем взаимодействия пользователя, выполняемого вручную.
[0048] На фиг. 2 показан пример 3D модели 12 поверхности подкорковой структуры головного мозга. 3D модель 12 поверхности содержит множество подструктур 24, таких как мозолистое тело, желудочки, скорлупа или бледный шар. Эти подструктуры 24 соединены в стыках, указанных линиями 26. Например, стык, соединяющий мозолистое тело и желудочки, указан пунктирной линией 28. Скорлупа и бледный шар соединены в стыке, указанном штрих-пунктирной линией 30. Кроме того, имеются «углы» 32 (показанные точками), которые имеют сильную локальную кривизну. Эти подструктуры 24, стыки 26 и углы 32 также называются подучастками 14 поверхности 3D модели 12 поверхности. На этапе редактирования вручную, некоторые части участков 14 поверхности являются более интересными или релевантными для диалогового редактирования или редактирования вручную, в том числе, например, стыки 26 и углы 32. Таким образом, на этапе 102, т.е. на этапе а), вершинам 16 (не показаны) этих подучастков 14, т.е. стыкам 26 и углам 32, может быть присвоено разное значение 18 ранжирования.
[0049] Ссылаясь теперь на фиг. 1, на этапе 106, т.е. на этапе с), существует множество функций комбинирования измеренного расстояния 23 приближенности к исследуемой точке 20 и присвоенного значения 18 ранжирования для идентифицирования целевой вершины 22. Например, функция может быть определена следующим образом:
[0050] d*L
[0051] где d представляет собой измеренное расстояние приближенности, a L представляет собой значение ранжирования.
[0052] В примере, вершинам 16, которые являются более релевантными для редактирования вручную, таким как вершины стыков 26 и углов 32 на фиг. 2, присваивают значение ранжирования, составляющее 0,1 (L=0,1), тогда как другим присваивают значение ранжирования, составляющее 1 (L=1). Таким образом, вершины 16 стыков 26 и углов 32, например, будут захвачены в качестве целевой вершины 22, даже если расстояние до самой ближайшей неугловой и нестыковой вершины будет в 9 раз меньше.
[0053] Модификация на этапе d) может включать адаптацию или деформацию 3D модели поверхности для целей редактирования. Например, модификацию обеспечивают для лучшей адаптации (более абстрактной или более обобщенной или упрощенной) 3D модели поверхности к текущей ситуации (например, с пациентом).
[0054] Термин «деформировать» относится к геометрическому преобразованию 3D модели поверхности на глобальном уровне, т.е. всей 3D модели поверхности, или на локальном уровне, т.е. одной или множества подучастков поверхности. Геометрическое преобразование может быть переходом, вращением, упругой депланацией, растяжением или другой формой преобразования.
[0055] В примере, модификацию обеспечивают для сопоставления 3D модели поверхности с исследуемой областью. Термин «сопоставлять» означает то, что геометрию 3D модели поверхности деформируют до тех пор, пока 3D модель поверхности не будет сочетаться с областью поверхности объекта, например, на представлении изображения (см. также ниже).
[0056] Таким образом, модификация представляет собой редактирование 3D объема путем редактирования, например, 3D сетки, представляющей 3D модель поверхности.
[0057] В качестве примера, модификация (или) деформация 3D модели поверхности предоставлена в виде преобразования Гаусса.
[0058] В соответствии с описанным выше способом, целевую вершину идентифицируют на основании ее приближенности к выбранной точке на 3D модели поверхности и значения ранжирования, и затем используют в качестве базовой вершины для модификации 3D модели поверхности, например, для точного сопоставления данных об изображении. На этапе редактирования вручную некоторые части 3D модели поверхности, как правило, являются более интересными для диалогового редактирования посредством взаимодействия, такие как 3D стыки, в которых соединены две или более областей, или 3D «углы», которые локально имеют большую криволинейность. Как правило, пользователь, такой как медицинский работник, захватывает целевую вершину из интересующих участков и деформирует 3D модель поверхности путем «захвата», «протягивания», «локальной кривизны» или «передвижения», например, с помощью манипулятора-мышь. Однако в средстве 3D просмотра с сеткой, захватывание целевой вершины или точки может быть утомительным, поскольку может быть заблокирован вид целевой вершины. Это также происходит на 2D виде, поскольку целевая вершина может быть не видна на текущей плоскости просмотра. За счет присвоения вершинам этих интересующих участков разных значений ранжирования, целевые вершины могут быть найдены даже тогда, когда они не видны пользователю. Когда пользователь выбирает точку на 3D модели поверхности, например путем щелчка манипулятором-мышью, идентифицируют целевые вершины интересующих участков, находящиеся ближе к выбранному положению. Таким образом, данный способ уменьшает ручные манипуляции для поиска целевой вершины для редактирования медицинских изображений и автоматизирует рабочий процесс.
[0059] В примере, значение 18 ранжирования принадлежит различным категориям ранжирования, содержащим по меньшей мере одну категорию из следующей группы: образование угла, пребывание в качестве части стыка, степень относительной кривизны и анатомическое значение.
[0060] Термин «образование угла» относится к точке, определяющей угол объема.
[0061] Термин «пребывание в качестве части стыка» относится к точке, принадлежащей двум различным подучасткам или подструктурам, каждая из которых соответствует стыку по форме.
[0062] Термин «степень относительной кривизны» относится к вершине, определяющей изогнутую структуру (линию или край) в ее характеристике, относящейся к изгибу. Например, линия с большим изгибом обладает большей степенью кривизны, чем линия с меньшим изгибом, или, иным словами, малый радиус дает круговой свод с большей степенью кривизны, чем большой радиус. Однако степень кривизны также относится к ряду изгибов, т.е. к ряду отдельных изогнутых сегментов.
[0063] Термин «анатомическое значение» относится к стандартным анатомическим ориентирам, т.е. анатомическому признаку, служащему для указания на конкретную структуру или положение, такое как кости, мышцы и кровеносные сосуды. Кроме того, термин «анатомическое значение» может относиться к подобластям органа, таким как белое вещество, серое вещество и ликворные пространства головного мозга.
[0064] В примере, «анатомическое значение» также относится к медицинскому/физиологическому значению, которое также обеспечивает возможность присвоения аспектов, относящихся к пациенту. Термин «медицинское/физиологическое значение» относится к патологическим областям, таким как раковые области, деформации ткани или поражения рассеянным склерозом.
[0065] Еще в одном примере, этап с) дополнительно включает выбор по меньшей мере одной целевой вершины в качестве точки модификации 3D модели поверхности путем взаимодействия пользователя.
[0066] Еще в одном примере обеспечено пороговое значение 34 приближенности. Идентифицирование включает идентифицирование вершин 16 в пределах порогового значения 34 приближенности определенной исследуемой точки 20.
[0067] Иными словами, осуществляют поиск целевой вершины 20 в пределах максимального расстояния порогового значения 34 приближенности. Пороговое значение 34 приближенности может быть фиксированным значением. Кроме того, пороговое значение 34 приближенности может зависеть от текущего поля обзора, т.е. отображаемой в данный момент плоскости объемного изображения.
[0068] Еще в одном примере, на этапе с) идентифицирование осуществляют автоматически в качестве функции автоматической привязки (функция «auto-snap») 3D модели поверхности.
[0069] Функция автоматической привязки также называется «функцией привязки к опорной вершине» или «функцией привязки в соответствии со значением ранжирования». Например, как только целевая вершина 20 идентифицирована или выбрана, целевую вершину 20 автоматически захватывает курсор.
[0070] Еще в одном примере, перед этапом с) пользователь может выбрать одну или более категорию ранжирования, применяемую для идентифицирования на этапе с).
[0071] Например, может быть обеспечено контекстное меню, обеспечивающее пользователю возможность выбора соответствующих категорий ранжирования, в том числе, например, «краевые точки», «точки стыка», «анатомические ориентиры» и/или «патологическая область». Таким образом, пользователь может дополнительно ограничить перечень потенциальных целевых вершин, тем самым избегая захвата неправильной целевой вершины.
[0072] В соответствии еще с одним иллюстративным вариантом реализации, показанным на фиг. 3, на этапе а) присвоенное значение ранжирования содержит присвоенную числовую метку 36, относящуюся к подучасткам 14 поверхности в зависимости от связанной категории. После этапа b) обеспечивают этап 110, также называемый этапом b1), на котором выбирают числовую метку 36 для идентифицирования. На этапе с) обеспечивают подэтап 112, также называемый этапом c1), на котором идентифицируют целевую вершину 22 с соответствующей числовой меткой 36.
[0073] Таким образом, выбирают только вершины 16 релевантных подучастков 14 поверхности, таких как стыки 26, и углы 32 на фиг. 2А и 2В. Кроме того, также могут быть идентифицированы вершины 16 конкретной подструктуры 24, такой как опухоль.
[0074] В соответствии еще с одним иллюстративным вариантом реализации, показанным на фиг. 4, присвоенное значение ранжирования содержит присвоенную анатомическую метку 38, относящуюся к подучасткам 14 поверхности в зависимости от связанной категории. После этапа b) обеспечивают этап 114, также называемый этапом b2), на котором определяют анатомическую метку 38 для идентифицирования. На этапе с) обеспечивают подэтап 116, также называемый этапом с2), на котором идентифицируют целевую вершину 22 с соответствующей анатомической меткой 38.
[0075] Это обеспечивает ограничение выбора или идентифицирования целевой вершины до выбранных пользователем анатомических областей, например, для предотвращения захвата скорлупы вместо точки бледного шара на фиг. 2.
[0076] В соответствии еще с одним иллюстративным вариантом реализации, показанным на фиг. 5, этап с) дополнительно включает: с3) отображение 118 идентифицированной целевой вершины 22, которую визуально выделяют; а этап d) дополнительно включает: d1) отображение 120 модифицированной 3D модели поверхности.
[0077] На этапе с3) визуально выделение может быть реализовано в виде цветовой маркировки, усиления контраста, усиления яркости или предоставления паттернов для идентифицирования, или мигания или мерцания идентифицированной целевой вершины.
[0078] Следует понимать, что отображение идентифицированной целевой вершины на этапе с3) и отображение 3D модели поверхности на этапе d1) может быть осуществлено через экран компьютера, телевизионный монитор, устанавливаемый на голове дисплей или, в качестве альтернативы, отображение может транслироваться через компьютерную сеть или аудиовизуальную распределительную систему на другой дисплей, или средства.
[0079] В соответствии еще с одним иллюстративным вариантом реализации, показанным на фиг. 6, на этапе а) дополнительно обеспечивают следующее: a1) обеспечение 122 2D медицинского изображения 40 исследуемого объекта; и а2) накладывание 124 2D представления среза 42 3D модели поверхности на 2D медицинское изображение в качестве комбинированного 2D изображения. 2D представление 42 и 2D медицинское изображение 40 совмещены друг с другом. На этапе b) соответствующую исследуемую точку 20 указывают на комбинированном 2D изображении; а на этапе d) также обеспечивают модификацию путем смещения указанной соответствующей точки на комбинированном 2D изображении.
[0080] Термин «медицинское изображение» относится к изображениям, генерируемым средствами медицинской визуализации, такими как средствами рентгеновской визуализации, например, рентгеновским аппаратом типа С-дуга или КТ (компьютерным томографом), или средствами магнитно-резонансной (MP) визуализации, или средствами ультразвуковой визуализации. Помимо одного типа изображений, медицинское изображение также может относиться к комбинации изображений из разных источников. Примером является комбинация КТ- и ПЭТ-изображений для объединения структурной и метаболической информации. Кроме того, медицинское изображение может относиться к интегрированным изображениям во времени, которые также называются массивами 4D данных об изображении, таких как МРТ, КТ при вдохе и выдохе, или 4D КТ, например, для отслеживания невыраженного движения анатомической структуры.
[0081] Термин «2D представление среза» относится к двумерному контуру 3D модели поверхности, представляющему границу объекта, наложенную на заданный срез изображения, при этом срез изображения, например, обеспечен для оценки набора объемного изображения на срезе посредством основания среза, такого как осевой, коронарный или сагиттальный вид среза. Например, двумерный контур может быть получен путем решения линейного уравнения плоскости между просматриваемой плоскостью изображения и краями 3D сетки поверхности, пересекающей плоскость изображения.
[0082] На фиг. 7 показан пример операции редактирования модели по фиг. 6. 2D медицинское изображение 40 (изображенное на фиг. 7 слева) предоставлено в виде вида подкорковой структуры головного мозга в поперечном сечении, с 2D представлением среза 42, т.е. контура, наложенного на 2D медицинское изображение 40. С правой стороны находится 3D модель 12 поверхности подкорковой структуры головного мозга. Целевую вершину 22 идентифицируют в соответствии с одним из вышеуказанных примеров, например, путем щелчка манипулятором-мышью рядом с 3D углом 32 на правой скорлупе. После этого, идентифицированную целевую вершину 32 выделяют, например, с использованием цветового маркирования или усиления контраста на 3D модели 12 поверхности и 2D представлении 42. В случае, если целевая вершина 22 не находится в текущей просматриваемой плоскости, 2D плоскость просмотра может быть отрегулирована так, что опорную вершину 22 маркируют и она становится явным образом видна после идентифицирования, например, путем изменения текущего вида, с которым работает пользователь, путем предоставления «миниатюрного» вида следом за основным видом, или любыми другими подходящими способами. Пользователь может достичь модификации непосредственно на 3D модели 12 поверхности, например, потянув за целевую вершину 22, что указано стрелкой 44 на фиг. 7. В качестве альтернативы, пользователь может сместить целевую вершину 12 на комбинированном 2D медицинском изображении 40 в модифицированной плоскости просмотра, или на миниатюрном виде.
[0083] На фиг. 8 показано устройство 50 для редактирования медицинских изображений, в соответствии с иллюстративным вариантом реализации настоящего изобретения. Устройство 50 для редактирования медицинских изображений содержит процессорный блок 52, блок 54 вывода и блок 56 интерфейса. Процессорный блок 52 выполнен с возможностью обеспечения 3D модели поверхности анатомической структуры исследуемого объекта. 3D модель поверхности содержит множество подучастков поверхности. Каждый подучасток поверхности содержит ряд вершин и каждой вершине присвоено значение ранжирования. Кроме того, процессорный блок 52 выполнен с возможностью идентифицирования по меньшей мере одной вершины из вершин, находящихся рядом с определенной исследуемой точкой, в качестве целевой вершины. Идентифицирование основано на функции измеренного расстояния приближенности к исследуемой точке и присвоенном значении ранжирования. Блок 54 вывода выполнен с возможностью обеспечения визуального представления 3D модели поверхности. Блок 56 интерфейса выполнен с возможностью определения исследуемой точки на визуальном представлении 3D модели поверхности путем взаимодействия пользователя. Кроме того, блок 56 интерфейса выполнен с возможностью модификации 3D модели поверхности путем смещения целевой вершины путем взаимодействия пользователя, выполняемого вручную. В качестве примера, блок 54 вывода представляет собой дисплей, выполненный с возможностью отображения 3D модели поверхности непосредственно пользователю 58.
[0084] В качестве примера, для устройства 50 для редактирования медицинских изображений не обязательно наличие медицинских изображений или данных об изображении, поскольку оно применимо к 3D модели поверхности.
[0085] В соответствии еще с одним иллюстративным вариантом реализации, процессорный блок 52, содержащийся в устройстве 50 для редактирования медицинских изображений, выполнен с возможностью обеспечения 2D медицинского изображения исследуемого объекта. Кроме того, процессорный блок 50 выполнен с возможностью наложения 2D представления среза 3D модели поверхности на 2D медицинское изображение в качестве комбинированного 2D изображения.
2D представления и 2D медицинские изображения совмещены друг с другом. Кроме того, процессорный блок 50 выполнен с возможностью указания соответствующей исследуемой точки на комбинированном 2D изображении. Кроме того, процессорный блок 50 выполнен с возможностью обеспечения модификации также путем смещения указанной соответствующей точки на комбинированном 2D изображении.
[0086] На фиг. 9 показана система 200 для медицинской визуализации, в соответствии с иллюстративным вариантом реализации настоящего изобретения, содержащая устройство 60 для получения медицинских изображений и устройство 62 для редактирования медицинских изображений, в соответствии с одним из примеров, описанных выше. Устройство 60 для получения медицинских изображений выполнено с возможностью обеспечения данных об изображении для модификации 3D модели 12 поверхности.
[0087] В качестве примера, устройство 60 для получения медицинских изображений обеспечено по меньшей мере в виде одного из следующей группы:
- устройство для получения рентгеновских изображений, такое как устройство для компьютерной томографии (КТ) или рентгеновский аппарат 64 типа С-дуга;
- магнитно-резонансное (MP) устройство 66;
- устройство 68 для чреспищеводной эхокардиографии (ЧПЭхоКГ);
- ультразвуковое устройство (дополнительно не показано);
- устройство для позитронно-эмиссионной томографии (ПЭТ) (дополнительно не показано); и
- устройство для однофотонной эмиссионной компьютерной томографии (ОФЭКТ) (дополнительно не показано).
[0088] Термин «данные об изображении» относится к данным или сигналам, обеспечиваемым устройством 60 для получения медицинских изображений. Как правило, эти данные подвергались только ограниченной предварительной обработке или вовсе ей не подвергались, и, как правило, четко не соответствуют медицинскому изображению, такому как вид в поперечном сечении, части тела.
[0089] Еще в одном иллюстративном варианте реализации настоящего изобретения, обеспечивается компьютерная программа или элемент компьютерной программы, характеризующаяся(-щийся) тем, что она/он выполнена/выполнен с возможностью выполнения этапов способа, в соответствии с одним из предшествующих вариантов реализации, на подходящей системе.
[0090] Таким образом, элемент компьютерной программы может храниться в вычислительном блоке, который также может представлять собой часть варианта реализации настоящего изобретения. Данный вычислительный блок может быть выполнен с возможностью выполнения или запуска выполнения этапов способа, описанного выше. Более того, он может быть выполнен с возможностью управления компонентами вышеописанного устройства. Вычислительный блок может быть выполнен с возможностью работы в автоматическом режиме и/или с возможностью выполнения порядка, заданного пользователем. Компьютерная программа может находиться в рабочей памяти процессора для обработки данных. Таким образом, процессор для обработки данных может быть снабжен средствами для выполнения способа, в соответствии с настоящим изобретением.
[0091] Данный иллюстративный вариант реализации настоящего изобретения охватывает как компьютерную программу, которая использует настоящее изобретение с самого начала, так и компьютерную программу, которая путем обновления преобразует существующую программу в программу, использующую настоящее изобретение.
[0092] Кроме того, элемент компьютерной программы может быть выполнен с возможностью обеспечения всех необходимых этапов для выполнения процедуры, в соответствии с иллюстративным вариантом реализации способа, описанного выше.
[0093] В соответствии еще с одним иллюстративным вариантом реализации настоящего изобретения, обеспечивается компьютерочитаемый носитель информации, такой как компакт-диск, при этом на компьютерочитаемом носителе информации хранится элемент компьютерной программы, описанный в предыдущем разделе.
[0094] Компьютерная программа может быть сохранена/распространена на подходящем носителе информации, таком как оптический носитель информации или твердотельный носитель информации, поставляемый вместе с другим аппаратным обеспечением или в качестве его части, но она также может быть распространена в другом виде, как, например, по сети Интернет или другим проводным или беспроводным телекоммуникационным системам.
[0095] Однако компьютерная программа также может быть представлена по сети, такой как всемирная сеть Интернет (World Wide Web), и может быть загружена в рабочую память процессора для обработки данных из такой сети. В соответствии еще с одним иллюстративным вариантом реализации настоящего изобретения, обеспечивается носитель информации, обеспечивающий доступность элемента компьютерной программы для загрузки, причем элемент компьютерной программы выполнен с возможностью выполнения способа, в соответствии с одним из вариантов реализации настоящего изобретения, описанных ранее.
[0096] Следует отметить, что варианты реализации настоящего изобретения описаны со ссылкой на различные объекты изобретения. В частности, некоторые варианты реализации описаны со ссылкой на пункты формулы изобретения, относящиеся к способу, тогда как другие варианты реализации описаны со ссылкой на пункты формулы изобретения, относящиеся к устройству. Однако из представленных выше сведений и описания специалист в данной области техники поймет, что в дополнение к любой комбинации признаков, принадлежащих одному типу объекта изобретения, любую комбинацию признаков, относящихся к другим объектам изобретения, также следует рассматривать как часть настоящей заявки, если не указано иное. Однако все признаки могут быть скомбинированы, обеспечивая эффекты совместного действия, что представляет собой нечто большее, чем простое суммирование признаков.
[0097] Несмотря на то, что изобретение было показано и описано подробно на чертежах и в вышеизложенном описании, такую иллюстрацию и описание следует считать иллюстративными или приведенными в качестве примера, и не ограничивающими. Настоящее изобретение не ограничено раскрытыми вариантами реализации. Другие вариации описанных вариантов реализации могут быть поняты и реализованы специалистом в данной области техники при осуществлении заявленного изобретения на практике после ознакомления с чертежами, описанием и зависимыми пунктами формулы изобретения.
[0098] В пунктах формулы изобретения слово «содержит» не исключает другие элементы или этапы, а грамматические показатели единственного числа не исключают множественное число. Отдельный процессор или другой блок может выполнять функции нескольких элементов, перечисленных в пунктах формулы изобретения. Сам по себе тот факт, что некоторые меры перечислены во взаимно зависимых пунктах формулы изобретения, не означает, что комбинация этих мер не может быть с успехом использована. Все ссылочные обозначения в формуле изобретения не должны рассматриваться как ограничивающие ее объем.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ ИНТЕРАКТИВНОЙ LIVE-MESH-СЕГМЕНТАЦИИ | 2010 |
|
RU2523915C2 |
| ИНТЕРАКТИВНЫЙ КОМПЬЮТЕРИЗОВАННЫЙ РЕДАКТОР ДЛЯ КОМПЕНСАТОРОВ, ИСПОЛЬЗУЕМЫХ В ПЛАНИРОВАНИИ ЛУЧЕВОЙ ТЕРАПИИ | 2010 |
|
RU2571374C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ВЫЯВЛЕНИЯ ОБЪЕМНЫХ ОБРАЗОВАНИЙ ПОЧЕК НА КОМПЬЮТЕРНЫХ ТОМОГРАММАХ БРЮШНОЙ ПОЛОСТИ | 2024 |
|
RU2839531C1 |
| СПОСОБ ВИЗУАЛИЗАЦИИ ДИНАМИЧЕСКОЙ АНАТОМИЧЕСКОЙ СТРУКТУРЫ | 2020 |
|
RU2808612C2 |
| УЛЬТРАЗВУКОВАЯ ДИАГНОСТИКА АНАТОМИЧЕСКИХ ОСОБЕННОСТЕЙ | 2018 |
|
RU2778840C2 |
| МОДЕЛИРОВАНИЕ АНАТОМИЧЕСКОЙ СТРУКТУРЫ МЕТОДОМ КОНЕЧНЫХ ЭЛЕМЕНТОВ | 2016 |
|
RU2719951C2 |
| Устройство создания многомерных виртуальных изображений органов дыхания человека и способ создания объёмных изображений с применением устройства | 2021 |
|
RU2783364C1 |
| УСТРАНЕНИЕ НЕОДНОЗНАЧНОСТИ ГЛУБИНЫ РАСПОЛОЖЕНИЯ ИНТЕРВЕНЦИОННЫХ ИНСТРУМЕНТОВ ИЗ ЕДИНСТВЕННОГО ИЗОБРАЖЕНИЯ В РЕНТГЕНОВСКОЙ ПРОЕКЦИИ И ЕГО КАЛИБРОВКИ | 2010 |
|
RU2575779C2 |
| ВИЗУАЛИЗАЦИЯ ДЛЯ НАВИГАЦИОННОГО УКАЗАНИЯ | 2012 |
|
RU2594811C2 |
| СИСТЕМЫ И СПОСОБЫ СЕГМЕНТАЦИИ ИЗОБРАЖЕНИЯ С ИСПОЛЬЗОВАНИЕМ СВЁРТОЧНОЙ НЕЙРОННОЙ СЕТИ | 2017 |
|
RU2720070C1 |






Группа изобретений относится к редактированию медицинских изображений. Технический результат - упрощение редактирования медицинских изображений. Для этого предложено устройство (50) для редактирования медицинских изображений, которое содержит процессорный блок (52), блок (54) вывода и блок (56) интерфейса. Процессорный блок (52) выполнен с возможностью обеспечения трехмерной (3D) модели поверхности анатомической структуры. 3D модель поверхности содержит множество подучастков поверхности. Каждый подучасток поверхности содержит ряд вершин и каждой вершине присвоено значение ранжирования. Кроме того, процессорный блок (52) выполнен с возможностью идентифицирования вершины в качестве целевой вершины. Идентифицирование основано на функции измеренного расстояния приближенности к исследуемой точке и значении ранжирования. Блок (54) вывода выполнен с возможностью обеспечения визуального представления. Блок (56) интерфейса выполнен с возможностью определения исследуемой точки на визуальном представлении 3D модели поверхности. Кроме того, блок 56 интерфейса выполнен с возможностью модификации 3D модели поверхности путем смещения целевой вершины. 4 н. и 10 з.п. ф-лы, 9 ил.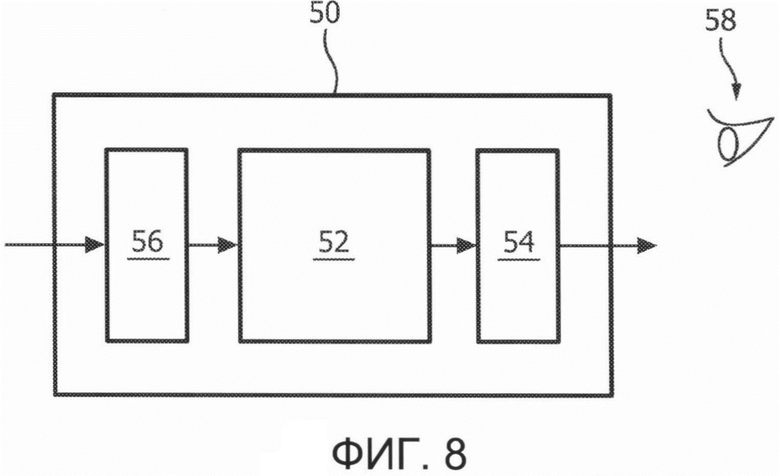
1. Устройство (50) для редактирования медицинских изображений, содержащее:
- процессорный блок (52);
- блок (54) вывода и
- блок (56) интерфейса; причем
процессорный блок выполнен:
с возможностью обеспечения трехмерной (3D) модели поверхности анатомической структуры исследуемого объекта;
при этом 3D модель поверхности содержит множество подучастков поверхности;
каждый подучасток поверхности содержит ряд вершин; и
каждой вершине присвоено значение ранжирования; а также
с возможностью идентифицирования по меньшей мере одной вершины из вершин, находящихся рядом с определенной исследуемой точкой, в качестве целевой вершины;
причем идентифицирование основано на функции измеренного расстояния приближенности к исследуемой точке и присвоенном значении ранжирования;
причем блок вывода выполнен с возможностью обеспечения визуального представления 3D модели поверхности; и
при этом блок интерфейса выполнен:
с возможностью определения исследуемой точки на визуальном представлении 3D модели поверхности путем взаимодействия пользователя; а также
с возможностью модификации 3D модели поверхности путем смещения целевой вершины путем взаимодействия пользователя, выполняемого вручную.
2. Устройство для редактирования медицинских изображений по п. 1, в котором значение ранжирования связано с различными категориями ранжирования, содержащими по меньшей мере одну категорию из следующей группы:
- образование угла;
- пребывание в качестве части стыка;
- степень относительной кривизны и
- анатомическое значение.
3. Устройство для редактирования медицинских изображений по п. 1 или 2, в котором процессорный блок дополнительно выполнен:
с возможностью обеспечения двумерного (2D) медицинского изображения исследуемого объекта; а также
с возможностью наложения 2D представления среза 3D модели поверхности на 2D медицинское изображение в качестве комбинированного 2D изображения,
причем 2D представление и 2D медицинское изображение совмещены друг с другом;
процессорный блок дополнительно выполнен с возможностью указания соответствующей исследуемой точки на комбинированном 2D изображении; и
процессорный блок дополнительно выполнен с возможностью обеспечения модификации также путем смещения указанной соответствующей точки на комбинированном 2D изображении.
4. Система (200) для медицинской визуализации, содержащая:
- устройство (60) для получения медицинских изображений и
- устройство (62) для редактирования медицинских изображений по одному из предыдущих пунктов;
причем устройство для получения медицинских изображений выполнено с возможностью обеспечения данных об изображении для модификации 3D модели поверхности.
5. Способ (100) редактирования медицинской 3D модели поверхности, включающий следующие этапы:
a) обеспечение (102) 3D модели (12) поверхности анатомической структуры исследуемого объекта; причем
3D модель поверхности содержит множество подучастков (14) поверхности;
каждый подучасток поверхности содержит ряд вершин (16); и
каждой вершине присвоено значение (18) ранжирования;
b) определение (104) исследуемой точки (20) на визуальном представлении 3D модели поверхности путем взаимодействия пользователя;
c) идентифицирование (106) по меньшей мере одной вершины из вершин, находящихся рядом с определенной исследуемой точкой, в качестве целевой вершины (22);
причем идентифицирование основано на функции измеренного расстояния (23) приближенности к исследуемой точке и присвоенном значении ранжирования; и
d) модификация (108) 3D модели поверхности путем смещения целевой вершины путем взаимодействия пользователя, выполняемого вручную.
6. Способ по п. 5,
в котором этап с) включает выбор по меньшей мере одной целевой вершины в качестве точки модификации 3D модели поверхности путем взаимодействия пользователя.
7. Способ по п. 5 или 6,
в котором на этапе с) обеспечивают пороговое значение (34) приближенности; а
идентифицирование включает идентифицирование вершин в пределах порогового значения приближенности определенного положения.
8. Способ по одному из пп. 5-7,
в котором на этапе с) идентифицирование осуществляют автоматически в виде функции автоматической привязки 3D модели поверхности.
9. Способ по одному из пп. 5-8,
в котором перед этапом с) пользователь может выбрать одну или более категорий ранжирования, подлежащих использованию для идентифицирования на этапе с).
10. Способ по одному из пп. 5-9,
в котором на этапе а) присвоенное значение ранжирования содержит присвоенную числовую метку (36), относящуюся к подучасткам поверхности в зависимости от связанной категории; и
после этапа b) обеспечивают:
b1) выбор (110) числовой метки для произведенного идентифицирования; а
на этапе с) обеспечивают подэтап
c1) идентифицирования (112) целевой вершины соответствующей числовой меткой.
11. Способ по одному из пп. 5-10,
в котором на этапе а) присвоенное значение ранжирования содержит присвоенную анатомическую метку (38), относящуюся к подучасткам поверхности в зависимости от связанной категории; и
после этапа b) обеспечивают:
b2) определение (114) анатомической метки для произведенного идентифицирования; а
на этапе с) обеспечивают подэтап
с2) идентифицирования (116) целевой вершины соответствующей анатомической меткой.
12. Способ по одному из пп. 5-11,
в котором этап с) дополнительно включает:
c3) отображение (118) идентифицированной целевой вершины; причем идентифицированную целевую вершину визуально выделяют; а
этап d) дополнительно включает:
d1) отображение (120) модифицированной 3D модели поверхности.
13. Способ по одному из пп. 5-12,
в котором на этапе а) дополнительно обеспечивают следующее:
a1) обеспечение (122) 2D медицинского изображения (40) исследуемого объекта и
а2) накладывание (124) 2D представления (42) среза 3D модели поверхности на 2D медицинское изображение в качестве комбинированного 2D изображения, причем 2D представление и 2D медицинское изображение совмещены друг с другом;
причем на этапе b) на комбинированном 2D изображении указывают соответствующую исследуемую точку; а
на этапе d) модификацию также обеспечивают путем смещения указанной соответствующей точки на комбинированном 2D изображении.
14. Компьютерочитаемый носитель информации, хранящий элемент компьютерной программы для управления устройством по одному из пп. 1-3, который выполнен с возможностью выполнения этапов способа по одному из пп. 5-13 при исполнении процессорным блоком.
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| ТРЕХМЕРНАЯ РЕКОНСТРУКЦИЯ ТЕЛА И КОНТУРА ТЕЛА | 2008 |
|
RU2479038C2 |

