ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к области формирования медицинских изображений. В частности, изобретение относится к аппарату для обследования для 3D-реконструкции тела и контура тела, способу 3D-реконструкции тела и контура тела, машиночитаемому носителю, программному элементу и устройству обработки изображения.
Наряду с другими применениями варианты осуществления изобретения особенно пригодны для направленной биопсии.
УРОВЕНЬ ТЕХНИКИ
Формирование высококонтрастных изображений является важным клиническим применением, прежде всего рентгенографических систем, предоставляющих врачам ценную информацию для диагностирования. Часто врачей интересует только несколько двумерных рентгеноскопических изображений, полученных под разными углами, чтобы минимизировать дозу излучения, получаемого пациентом или по причине механических ограничений в месте расположения кровати или в операционной комнате.
Другой пример относится к вращательной ангиографии сети сосудов. Хотя количество зафиксированных проекций может изменяться от 80 до 200, проекций, относящихся к одной фазе сердечного цикла, значительно меньше, например, от 4 до 10. Однако трехмерные реконструкции на основе ограниченного количества проекций с использованием стандартных методик реконструкции по проекциям с фильтрацией (FBP) могут оказаться размытыми. Итеративные алгоритмы максимального правдоподобия (ML) могут улучшить отношение сигнал-шум, но без дополнительной регуляризации приемлемая реконструкция может оказаться невозможной.
В последние годы достигнут некоторый прогресс в реконструкции разреженных объектов, таких как сосуды, заполненные болюсом. Предложена другая методика на основе многогранных моделей объектов, где считается известным значение затухания. В обеих методиках для стабилизации реконструкции используется априорная информация, например, «разреженность» или многогранный характер объекта.
В случае биопсии такие высококонтрастные изображения можно использовать перед непосредственным взятием биоптата, то есть для планирования этой операции.
Биопсию проводят для правильного диагностирования различных раковых заболеваний. Это возможно либо с помощью просвета эндоскопа или с применением пункционной и катетерной биопсий. Чтобы найти правильное место для взятия биопсии, используют различные технологии формирования изображений, такие как рентгеноскопия, компьютерная томография (CT), магнитно-резонансная визуализация (MRI) и ультразвуковое исследование. Например, в случае рака простаты управление биопсией в большинстве случаев осуществляется ультразвуком. Хотя эти методы управления являются полезными, они далеки от оптимальных.
Проблема, непосредственно связанная с биопсией, состоит в том, что разрешающая способность системы формирования изображений ограничена, и, следовательно, биопсия часто проводится вслепую с ограниченной обратной связью, дающей информацию о том, как расположена игла по отношению к целевой опухоли, что приводит к дополнительной неопределенности по поводу того, попала ли игла в место патологического изменения. Очевидно, что требуется улучшить управление для наведения биопсийной иглы в нужное место в ткани.
Одним из путей решения проблемы наведения на ткань, вызывающую подозрение, является наведение кончика биопсийной иглы путем использования, например, электромагнитного наведения. Однако точность этого метода ограничена несколькими миллиметрами. В результате при малых объемах ткани, вызывающей подозрение, имеется определенная вероятность выполнения биопсии не в намеченном месте. Еще одно ограничение состоит в том, что если даже удастся направить биопсийную иглу точно в то место, которое соответствует предварительно записанному изображению, никогда нет уверенности в том, что это то самое место, из-за сжимаемости ткани. Под воздействием биопсийной иглы на ткань во время ее продвижения ткань может деформироваться.
Если взятая проба оказывается злокачественной, то в большинстве случаев эта злокачественная ткань будет удалена посредством хирургической операции (особенно, когда опухоль достаточно локализована) или будет обработана подкожно с использованием радиочастотного излучения, микроволнового излучения или криодеструкции.
Хирургический подход осложняется тем обстоятельством, что хирурги, как правило, используют для обнаружения опухоли только свои глаза и руки (пальпация) и должны полагаться на информацию, предоставляемую предварительно записанными изображениями. Эти предварительно записанные изображения предоставляют информацию о местоположении опухоли, но не всегда четко показывают ее границы. Иногда хирург, ориентируясь по изображению, имплантирует маркер, обеспечивающий ему опорную точку для фокусировки во время хирургической операции. Повторное проведение локализующего проводника в нужное место затруднено.
Биопсийное устройство можно также использовать в качестве устройства для введения лекарств или терапии (типа деструкции) в определенном месте в теле человека без удаления ткани, например, для впрыскивания жидкости в нужное место в пораженной части человеческого тела. Аналогичные недостатки присущи и этим вмешательствам, когда трудно навести биопсийное устройство в нужное место.
Соответственно, используемый в настоящее время способ взятия биоптата имеет недостаток, заключающийся в трудностях наведения биопсийного устройства предпочтительно в центр исследуемой ткани.
Желательно иметь улучшенный способ моделирования человеческого тела, а также контура тела интересующего объекта в качестве основы для усовершенствованного управления биопсией. Кроме того, желательно иметь аппарат, с помощью которого можно интраоперационно локализовать и отследить местоположение биопсийного устройства, то есть выполнять это во время взятия биоптата.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Изобретение обеспечивает аппарат для обследования, способ, пользовательский интерфейс, машиночитаемый носитель и устройство обработки изображения с признаками согласно соответствующим независимым пунктам формулы изобретения.
Изобретение предлагает реконструкцию очертания пациента, исходя из трансверсально усеченных проекций с использованием многогранной модели объекта. Возможные клинические приложения относятся к области направленной биопсии в системах сбора данных, оборудованных плоскопанельным детектором, когда нельзя избежать усеченных проекций в протоколах сканирования грудной клетки и брюшной полости. В результате вращательного движения создается трехмерная (3D) объемная реконструкция и реконструкция поверхностной сетки для очертания тела пациента с последующей одновременной визуализацией, что помогает врачу наводить биопсийное устройство и оценивать расстояние от кожи пациента до интересующей ткани внутри реконструированного объема.
В общем случае аппарат для обследования согласно изобретению для 3D-реконструкции тела и контура тела интересующего объекта содержит устройство сбора данных для сбора данных проецирования интересующего объекта, вычислительный блок, выполненный с возможностью выполнения этапов реконструкции интересующей области и реконструкции однородного многогранника вне интересующей области, и устройство отображения для отображения комбинированной визуализации реконструированной интересующей области и реконструированного многогранника.
Этап реконструкции однородного многогранника согласно другому варианту изобретения включает в себя прямое проецирование реконструированной функции затухания интересующей области, вычитание результата из собранных данных проецирования для создания целевой функции, прямое проецирование многогранной модели, состоящей из субмодели контура тела и субмодели интересующей области с функцией постоянного затухания внутри каждой из субмоделей. Кроме того, этап реконструкции однородного многогранника включает в себя этап оптимизации, на котором оптимизируют модель однородного многогранника путем минимизации разности между прямоспроецированной моделью и целевой функцией.
Следует заметить, что прямое проецирование реконструированной функции затухания выполняют по существу внутри интересующей области. Кроме того, контур тела и также интересующую область можно разделить на несколько субмоделей, так что многогранная модель будет состоять из нескольких субмоделей контура тела и по меньшей мере одной субмодели интересующей области.
Согласно еще одному варианту изобретения предложен пользовательский интерфейс для визуализации 3D-реконструкции тела и контура тела, при этом визуализацию и реконструкции данных выполняют после сбора данных проецирования интересующего объекта.
В этой связи заметим, что реконструкции данных предпочтительно выполнять после сбора данных проецирования. Однако возможно выполнение реконструкции данных также во время сбора данных проецирования, то есть выполнение реконструкции данных на основе первого набора данных проецирования, когда имеет место следующее проецирование. В этом случае промежуточные результаты можно визуализировать во время дальнейших проецирований, что фактически приведет к оптимизации реконструкции и, следовательно, к оптимизации визуализации.
Что касается указанного пользовательского интерфейса, то можно использовать один пользовательский интерфейс с другими устройствами сбора данных предпочтительно на основе С-образного рычага. Будучи подсоединенным к указанному устройству, пользовательский интерфейс обеспечивает визуализацию реконструкции тела вместе с реконструкцией контура тела. Таким образом, пользовательский интерфейс может помочь врачу в точном наведении биопсийного устройства в интересующее место внутри тела.
Способ 3D-реконструкции тела и контура тела согласно варианту изобретения содержит этапы, на которых реконструируют интересующую область, реконструируют однородный многогранник вне интересующей области и оптимизируют реконструкции после сбора данных проецирования, что приводит к оптимизированной визуализации тела вместе с контуром тела интересующего объекта.
Этот способ может выполняться в аппарате для обследования согласно изобретению.
Кроме того, изобретение относится к устройству обработки изображения для 3D-реконструкции тела и контура тела, причем устройство обработки изображения выполнено с возможностью реконструкции интересующей области, реконструкции однородного многогранника вне интересующей области, оптимизации реконструкций после сбора данных проецирования, что приводит к оптимизированной визуализации тела вместе с контуром тела интересующего объекта.
Изобретение также относится к компьютерной программе для устройства обработки изображения, так что способ согласно изобретению может выполняться в подходящей для этого системе. Компьютерную программу предпочтительно загружают в рабочую память процессора данных. Таким образом, процессор данных оборудован для выполнения способа по изобретению. Кроме того, изобретение относится к машиночитаемому носителю, например, ПЗУ на компакт-диске (CD-ROM), где может храниться компьютерная программа. Однако компьютерная программа также может быть представлена через сеть типа Всемирной паутины и может быть загружена в рабочую память процессора данных из указанной сети.
Необходимо заметить, что варианты изобретения описаны со ссылками на различные объекты изобретения. В частности, некоторые варианты описаны со ссылками на пункты формулы изобретения, относящиеся к пунктам типа «способ», в то время как другие варианты описаны со ссылками на пункты типа «устройство». Однако специалисты в данной области техники из приведенного выше и последующего описания поймут, что если не упомянуто иное, считается, что вдобавок к любой комбинации признаков, принадлежащих к одному типу объекта изобретения, любая комбинация признаков, относящихся к другим объектам изобретения, также раскрыта этой заявкой.
Определенные выше аспекты, а также другие аспекты, признаки и преимущества настоящего изобретения также можно вывести из примеров вариантов изобретения, описываемых далее и поясняемых со ссылками на примеры вариантов изобретения.
Более подробное описание изобретения приведено ниже со ссылками на примеры вариантов его осуществления, которыми изобретение не ограничивается.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Далее описываются примерные варианты настоящего изобретения со ссылками на следующие чертежи.
Фиг.1 - примерный вариант аппарата для обследования согласно настоящему изобретению;
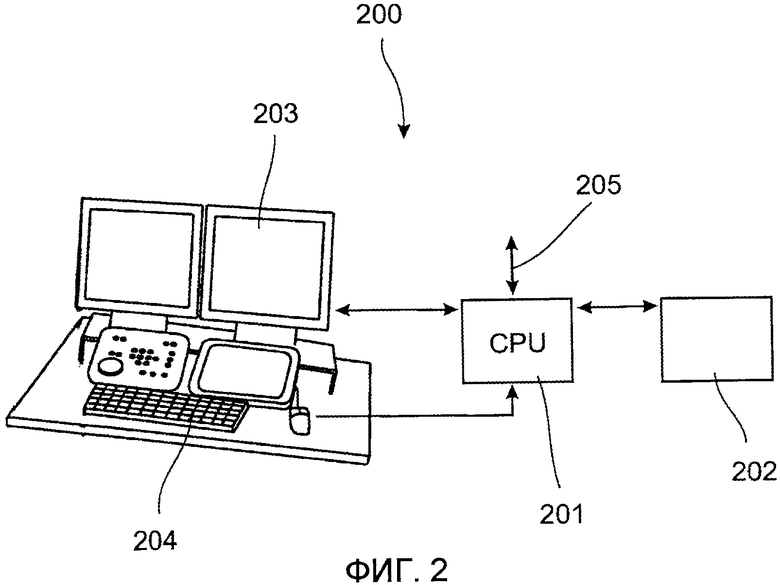
фиг.2 - примерный вариант устройства обработки изображения согласно настоящему изобретению для выполнения примерного варианта способа согласно настоящему изобретению;
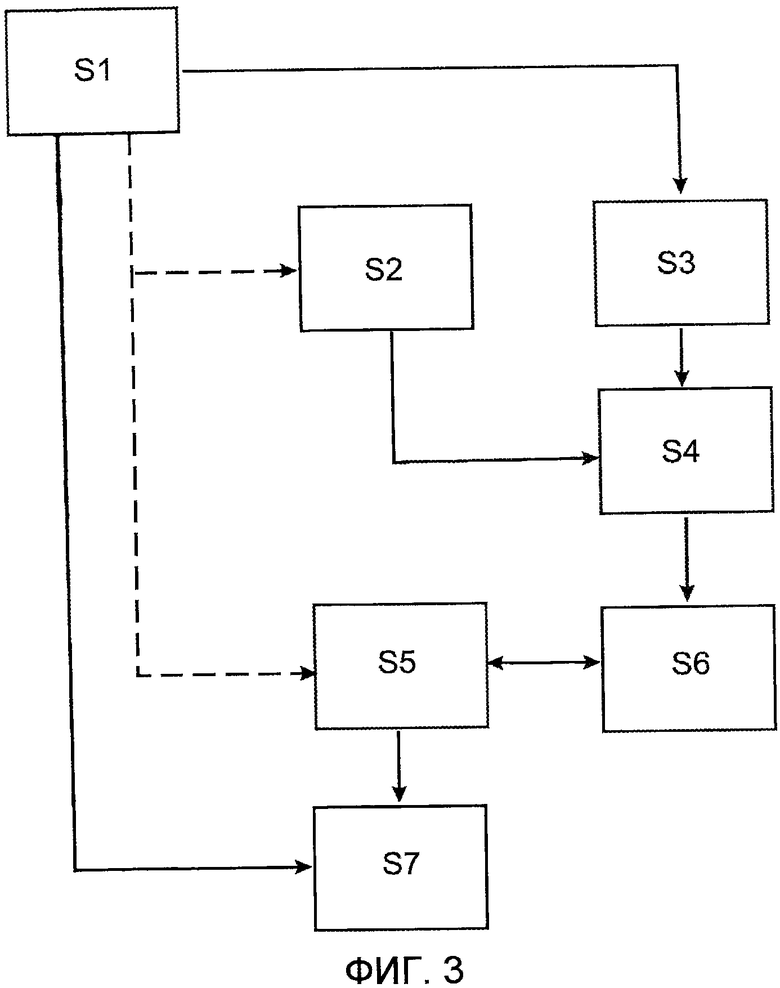
фиг.3 - блок-схема примерного варианта согласно настоящему изобретению;
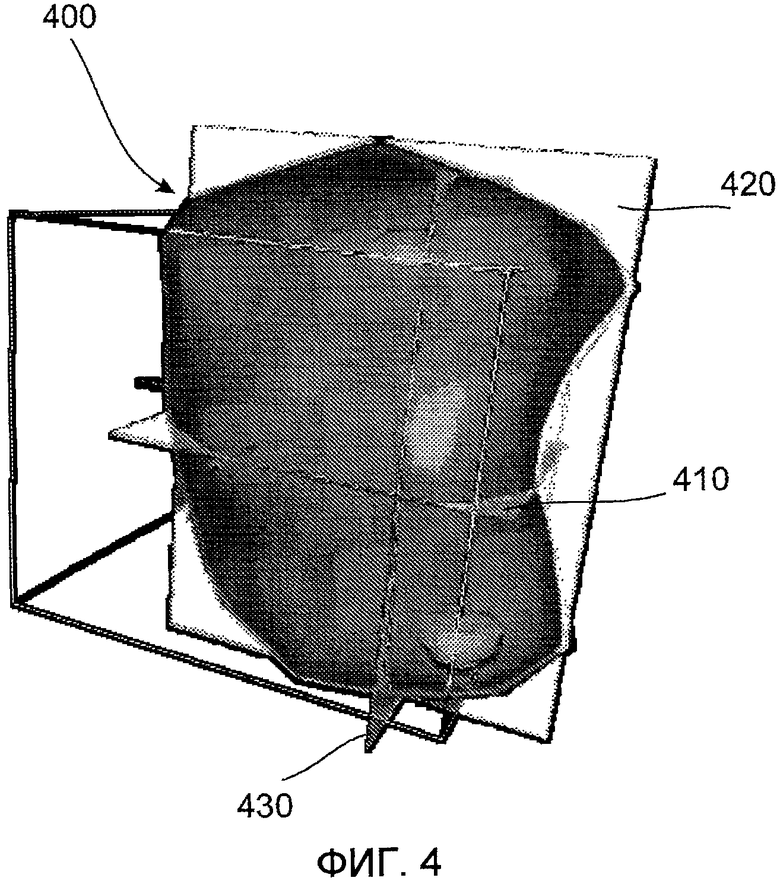
фиг.4 - примерная реконструкция однородного многогранника;
фиг.5 - примерная реконструкция интересующей области и контура тела вместе со схематической иллюстрацией биопсийного устройства;
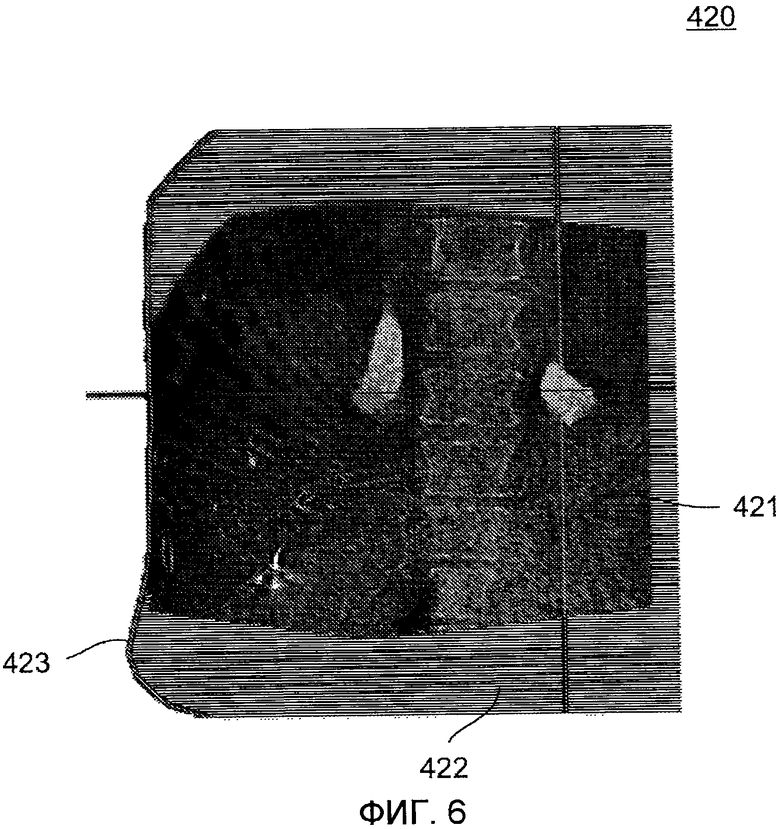
фиг.6 - другая примерная реконструкция интересующей области и контура тела;
фиг.7 - еще одна примерная реконструкция интересующей области и контура тела.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Изображения на чертежах носят схематический характер. На разных чертежах подобные или идентичные элементы снабжены одинаковыми ссылочными позициями.
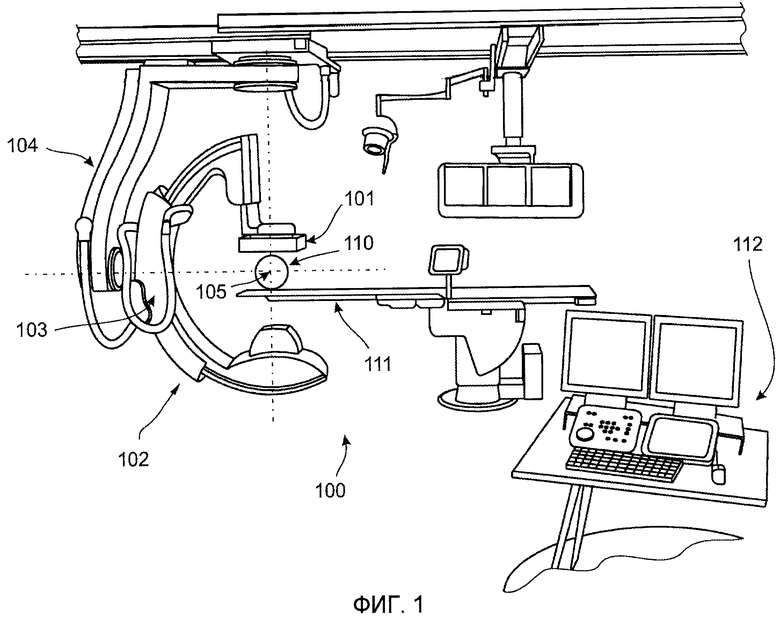
На фиг.1 схематически представлен примерный вращательный рентгеновский сканер, выполненный на основе сканера с С-образным рычагом согласно примерному варианту настоящего изобретения. Однако следует заметить, что настоящее изобретение не ограничивается вращательными рентгеновскими сканерами.
На концах С-образного рычага 102 смонтированы источник рентгеновского излучения и плоский детектор 101 с большой чувствительной поверхностью. С-образный рычаг 102 удерживается искривленной направляющей - рукавом 103. С-образный рычаг может скользить в рукаве 103, выполняя тем самым «угловое движение» вокруг оси С-образного рычага. Рукав 103 прикреплен к L- образному рычагу 104 посредством поворотного шарнира и может выполнять «винтовое движение» вокруг оси этого шарнира. L-образный рычаг 104 прикреплен к потолку посредством другого поворотного шарнира и может вращаться относительно оси этого шарнира. Различные вращательные перемещения обеспечиваются серводвигателями. Оси трех вращательных движений и ось конического пучка всегда пересекаются в единственной фиксированной точке - «изоцентре» 105 вращательного рентгеновского сканера. Вокруг изоцентра имеется некоторый объем, куда проецируются все конические пучки вдоль траектории источника. Форма и размер этого «объема проецирования» (VOP) зависят от формы и размера детектора и траектории источника. На фиг.1 шар 110 показывает наибольший изоцентрический шар, который вписывается в объем VOP. Объект (например, пациент или предмет багажа), для которого требуется сформировать изображение, помещают на стол 111, так чтобы интересующий объем объекта (VOI) заполнил объем VOP. Если объект достаточно мал, он полностью поместится в VOP, а в противном случае нет. Следовательно, VOP ограничивает размер VOI.
Управление различными вращательными движениями осуществляется блоком управления. Положение источника рентгеновского излучения определяется тремя параметрами: углом C-образного рычага, углом рукава и углом L-образного рычага. Изменяя эти углы во времени, можно добиться того, что источник будет перемещаться согласно предписанной траектории. Детектор на другом конце С-образного рычага перемещается соответствующим образом. Траектория источника ограничивается поверхностью изоцентрической сферы.
Рентгеновский сканер с С-образным рычагом приспособлен для выполнения способа обследования согласно изобретению.
Следует заметить, что рентгеновский сканер с С-образным рычагом особенно полезен для интраоперационного сканирования интересующего объекта.
На фиг.2 показан примерный вариант устройства 200 обработки изображения согласно настоящему изобретению для выполнения примерного варианта способа согласно настоящему изобретению. Устройство 200 обработки изображения, показанное на фиг.2, содержит центральный процессор (CPU) или процессор 201 изображения, соединенный с памятью 202 для сохранения изображения, представляющего интересующий объект, например пациента или предмета багажа. Процессор 201 изображения может быть подсоединен к множеству сетевых или диагностических устройств ввода/вывода, таких как устройство для компьютерной томографии (КТ). Кроме того, процессор 201 изображения может быть подсоединен к устройству 203 отображения, например компьютерному монитору, для отображения информации или изображения, вычисленного или выполненного в процессоре 201 изображения. Оператор или пользователь может взаимодействовать с процессором 201 изображения через клавиатуру 204 и/или другие устройства ввода.
Процессор 201 изображения, память 202, устройство 203 отображения вместе с устройством 204 ввода могут фактически образовать пользовательский интерфейс согласно изобретению.
Кроме того, через систему 205 шин процессор 201 обработки изображения и управления можно также подсоединить, например, к монитору перемещения, который контролирует перемещение интересующего объекта. Например, в случае когда изображается легкое пациента, датчиком перемещения может быть датчик выдыхания. В случае формирования изображения сердца роль датчика перемещения может сыграть электрокардиограмма.
На фиг.3 показана блок-схема примерного способа согласно настоящему изобретению.
На этапе S1 создается функция затухания внутри интересующей области, исходя из предварительно записанного изображения. Предпочтительно, чтобы предварительно записанное изображение являлось трехмерным представлением с высоким разрешением, по меньшей мере, интересующей области. Предварительно записанное изображение можно вычислить исходя из данных системы компьютерной томографии или аналогичного устройства. В альтернативном варианте интересующую область можно реконструировать, используя, например, методики реконструкции изображения по проекциям с фильтрацией исходя из данных, собранных вращательным сканером с С-образным рычагом.
На этапе S2 от источника излучения в направлении детектора излучается несколько рентгеновских пучков, в результате чего создается несколько проекций. С помощью этих проекций получают данные проецирования под различными углами относительно интересующего объекта. Во время указанного сбора данных записывается информация о положении источника излучения и детектора относительно интересующего объекта, которая присваивается соответствующей проекции. В альтернативном варианте на основе сбора данных, проведенного на этапе S1, можно собрать субнабор рентгенографических проекций.
На этапах S3, S4, S5 и S6 реконструируют однородный многогранник вне интересующей области. Если более подробно, то упомянутые этапы включают в себя следующие аспекты.
На основе результатов этапа S1 реконструированная интересующая область, то есть функция переменного затухания, прямо проецируется на этапе S3 на геометрическую структуру, полученную на этапе S2.
На этапе S4 определяют разность между вычисленными данными на этапе S3 и измеренными данными на этапе S2.
На этапе S5 вычисляют вклад области между контуром тела, описанным однородным многогранником, и интересующей областью в данные проецирования. С этой целью на геометрическую структуру детектора, полученную на этапе S2, прямо проецируют функцию постоянного затухания в интересующей области. Затем результат вычитают из прямой проекции однородного многогранника, который моделирует контур тела.
То есть, сначала выбирают рентгеновский пучок, излучаемый источником излучения в направлении детектора, и вычисляют точки пересечения пучка с многогранной моделью. Это вычисление дает входные и выходные точки (в которых пучок входит или выходит из модели), где количество входных и выходных точек является четным числом, в случае когда пучок не попадает на край или что-либо подобное. Кроме того, вычисляют расстояние, которое проходит пучок через объект, то есть модель. Следует заметить, что возможно больше одной входной точки в интересующий объект и больше одной выходной точки из этого объекта. Наконец, вычисляют линейный интеграл по объекту вдоль рентгеновского пучка в виде суммы расстояний, которые проходит рентгеновский луч через объект.
Таким же образом вычисляют линейный интеграл по интересующей области вдоль рентгеновского пучка. Путем вычитания вычисленного линейного интеграла по интересующей области из линейного интеграла по объекту, то есть модели, можно вычислить линейный интеграл вдоль рентгеновского луча через область между моделью внешнего контура тела и интересующей областью.
Наконец, на этапе S6 минимизируют разность между результатами этапа S4 и этапа S5, например, на основе схемы градиентного снижения, где также можно использовать другие схемы минимизации.
Математически этапы с S3 по S6 включают в себя следующие подходы и вычисления для реконструкции однородного многогранника.
Оптимизация координат многогранной модели может быть выполнена, например, попеременно или путем оптимизации одного неизвестного параметра , который содержит вершины или координаты
, который содержит вершины или координаты  модели поверхности и значение затухания.
модели поверхности и значение затухания.
Кроме того, следует заметить, что многогранная модель может состоять из нескольких субмоделей, каждая из которых имеет свои собственные вершины и значение затухания. В этом случае неизвестный вектор, который подвергается процедуре оптимизации, может быть записан в виде  , причем
, причем  . В этом смысле термин «многогранная модель» содержит составляющие модели, а термин «значение затухания» содержит соответствующий вектор затухания, описывающий коэффициент затухания в субмоделях составной многогранной модели.
. В этом смысле термин «многогранная модель» содержит составляющие модели, а термин «значение затухания» содержит соответствующий вектор затухания, описывающий коэффициент затухания в субмоделях составной многогранной модели.
В качестве примерного варианта для реконструкции однородного многогранника модель может состоять из двух субмоделей: одной модели  , описывающей контур тела, и другой модели
, описывающей контур тела, и другой модели  , описывающей интересующую область. Для моделирования области между контуром тела и интересующей областью значения затухания связаны соотношением µ1=-µ2.
, описывающей интересующую область. Для моделирования области между контуром тела и интересующей областью значения затухания связаны соотношением µ1=-µ2.
3D-реконструкция из небольшого количества проекций является активным полем исследований, и на сегодняшний день здесь известны лишь частные результаты. Изобретение не ограничивается реконструкцией контура тела, а может также применяться для реконструкции камер сердца, заполненных болюсом. Предлагается оптимизировать модель поверхности путем прямого проецирования модели и минимизации разности между моделями прямого проецирования и измеренными линейными интегралами. В случае реконструкции контура тела модель оптимизируют путем минимизации разности, вычисляемой на этапе S6. Поскольку предложенный способ полностью основан на физической модели затухающих рентгеновских лучей, невыпуклые участки можно легко реконструировать в отличие от других способов, основанных на адаптации модели к контурам краев в проекциях. Кроме того, представленная схема моделирования реконструирует как многогранную форму, так и затухание однородного препятствия. По сравнению со схемами итеративной реконструкции на воксельной основе, многогранная реконструкция основана на контуре, что может сократить количество неизвестных из-за сокращения одного размера. Следовательно, реконструкция на основе контура может оказаться более быстрой, чем известные итеративные алгоритмы на воксельной основе.
Неизвестный объект моделируется с помощью треугольной поверхностной сетки, где первая грубая оценка инициализирует процедуру реконструкции. Топология модели должна быть известна или должна быть априорно известна ее грубая оценка, причем топологию часто задают вместе с подходящей начальной сеткой с помощью конкретного приложения, например изображений сердца, сосудов или скелета. Следует заметить, что для реконструкции тела и контура тела для направленной биопсии начальную сетку можно создать на основе этапе S1, то есть из 3D-реконструкции интересующего объема. Затем оптимизируют координаты вершин в схеме реконструкции. Вдобавок, неизвестно постоянное затухание объекта, которое оптимизируют попеременно с вершинами. Для стабилизации реконструкции и во избежание самопересечений и вырожденных треугольников к члену, относящемуся к ошибке расхождения данных, добавляется множество различных штрафных членов. Для ускорения схемы моделирования может быть предусмотрена схема детализации, которая запускается, начиная с крупноячеистой поверхностной сетки и субдискретизированных проекций. При плавном уменьшении штрафного члена поверхностная сетка может быть детализирована, и выполняется передискретизация проекций, если это необходимо. Также может быть обеспечено адаптивное управление параметрами регуляризации.
Далее подробно описывается примерный вариант для реконструкции однородного многогранника согласно настоящему изобретению.
Вдобавок к реконструкции контура высококонтрастного объекта также реконструируют коэффициент затухания. С этой целью неизвестный объект моделируют посредством треугольной поверхностной сетки с вершинами  и списка индекса вершин
и списка индекса вершин  , который определяет М треугольных граней
, который определяет М треугольных граней  , упорядоченных так, что соответствующая нормаль грани
, упорядоченных так, что соответствующая нормаль грани
указывает на внешнюю сторону объекта для j=1,…M . Вместе с постоянным коэффициентом µ эти параметры образуют модель (µ,V,F). Здесь затухание µ и координаты V вершины являются неизвестными, в то время как порядок граней F известен заранее. Для реконструкции модели объекта затухание µ оптимизируют попеременно с вершинами  . С этой целью вычисляют разность между измеренными значениями проекции pl, l=1,…,L и значениями прямой проекции ql=Al(µ,V,F) вместе с дополнительными штрафными членами
. С этой целью вычисляют разность между измеренными значениями проекции pl, l=1,…,L и значениями прямой проекции ql=Al(µ,V,F) вместе с дополнительными штрафными членами  :
:

Прямую проекцию модели можно вычислить как

где Il пересечений  l-го луча с поверхностными треугольниками Tj для j=1,…,M, многогранника упорядочивают по увеличению расстояния до места положения источника. В случае нечетного количества пересечений Il
l-й луч заменяют параллельным лучом в окрестности исходного луча. Эта ситуация может возникнуть, если луч попадает на объект точно в вершину или пересекает край треугольной грани.
l-го луча с поверхностными треугольниками Tj для j=1,…,M, многогранника упорядочивают по увеличению расстояния до места положения источника. В случае нечетного количества пересечений Il
l-й луч заменяют параллельным лучом в окрестности исходного луча. Эта ситуация может возникнуть, если луч попадает на объект точно в вершину или пересекает край треугольной грани.
Для фиксированных положений вершины штрафные члены являются константами, и минимизация согласно формуле (1) сводится к определению минимума параболы

причем  . В этом случае уникальный
минимизатор функционала (1) задается минимизатором
. В этом случае уникальный
минимизатор функционала (1) задается минимизатором

параболы (3). С другой стороны, для фиксированного коэффициента µ затухания функционал (1) можно минимизировать, используя следующую схему градиентного снижения:
1. Численное вычисление градиента  по формуле (1) относительно вершин V.
по формуле (1) относительно вершин V.
2. Разрешение проблемы одномерной оптимизации через суррогатный функционал  .
.
3. Аппроксимация  параболой
параболой  , так что
, так что
а)  , т.е.
, т.е.  ,
,
б)  , т.е.
, т.е.
в)  для подходящего t≠s.
для подходящего t≠s.
4. Обновление V=V-sG, где s - уникальный минимизатор для параболы  .
.
Согласно одному аспекту настоящего изобретения многогранная модель содержит вершины с координатами, где многогранная модель имеет топологию, связывающую, по меньшей мере, одну из вершин с гранью поверхности многогранной модели. Кроме того, аппарат для обследования согласно изобретению содержит вычислительный блок, выполненный с возможностью выполнения этапов оптимизации (например, попеременно) координат многогранной модели и функции затухания многогранной модели во время реконструкции данных, что дает оптимальное значение затухания вместе с моделью поверхности интересующего объекта.
Следует заметить, что топология может соединять каждую из вершин с соответствующей поверхностью модели. Однако для выполнения моделирования многогранной модели не все вершины могут быть соединены с соответствующей поверхностью.
Следует заметить, что оптимизация координат многогранной модели может выполняться, например, попеременно или путем оптимизации одного неизвестного параметра  , который содержит вершины или координаты
, который содержит вершины или координаты  модели поверхности и значение затухания.
модели поверхности и значение затухания.
Кроме того, следует заметить, что многогранная модель может состоять из нескольких субмоделей, каждая из которых снабжена собственными вершинами и значением затухания. В этом случае неизвестный вектор, который подвергается процедуре оптимизации, может быть записан в виде  , причем
, причем  . В этом смысле термин «многогранная модель» содержит составляющие модели, а термин «значение затухания» содержит соответствующий вектор затухания, описывающий коэффициент затухания в субмоделях составной многогранной модели.
. В этом смысле термин «многогранная модель» содержит составляющие модели, а термин «значение затухания» содержит соответствующий вектор затухания, описывающий коэффициент затухания в субмоделях составной многогранной модели.
Для предотвращения ухудшения или вырождения могут выполняться небольшие этапы и/или могут быть реализованы подходящие члены регуляризации.
Для стабилизации итеративной процедуры реконструкции можно выбрать следующие штрафные члены:
1. Отклонение вершин от барицентра соседей (благоприятные плоские поверхности)

где барицентр  для Kj соседей
для Kj соседей  вершины
вершины  в сетке (V,F).
в сетке (V,F).
2. Отклонение площади грани от средней площади треугольника в сетке

3. Штрафной член для соприкасающихся треугольников

при условии, что  , где Jk - количество соседних граней при вершине
, где Jk - количество соседних граней при вершине  .
.
4. Отклонение от правильных треугольников

где αk,βk,γk - три угла треугольника Tk.
Соответствующие параметры λ1,…,λ4 регуляризации регулируются во время итерации для управления процедурой оптимизации. С этой целью первый выбор параметров регуляризации выполняется таким образом, чтобы сумма всех штрафных членов оказалась между 10%-50% разности без какого-либо дополнительного штрафного члена. После фиксированного количества итераций проверяется отношение штрафных членов к единственной разности, которое адаптируется, если указанная сумма выходит за рамки диапазона 10%-50%. Аналогичным образом обновляют параметр регуляризации, если соответствующий штрафной член значительно больше/меньше среднего штрафного члена. При таком выборе параметра можно избежать самопересечения или вырождения многогранной модели объекта. Чтобы минимизировать расхождение в данных проецирования, отношение штрафных членов к расхождению данных проецирования последовательно уменьшают при каждой детализации сетки.
Для реконструкции составной многогранной модели, состоящей из M субмоделей  , i=1,…,M, прямой проектор может быть детализирован в виде
, i=1,…,M, прямой проектор может быть детализирован в виде  , то есть в виде суммы вкладов каждой субмодели, в результате чего переопределяют функцию объекта (1). В этом случае вычисление (4) значений µi, i=1,…,M затухания заменяется решением линейной системы уравнений:
, то есть в виде суммы вкладов каждой субмодели, в результате чего переопределяют функцию объекта (1). В этом случае вычисление (4) значений µi, i=1,…,M затухания заменяется решением линейной системы уравнений:

например, с использованием разложения Холецкого.
На каждую из субмоделей может быть наложен штраф с помощью одного или нескольких членов регуляризации (5)-(8) (сравни с вышеописанным). Кроме того, для управления межобъектным поведением субмоделей могут быть введены дополнительные штрафные члены.
Следует заметить, что модель может состоять из двух субмоделей: одной модели  , описывающей контур тела, и другой модели
, описывающей контур тела, и другой модели  , описывающей интересующую область. Для моделирования области между контуром тела и интересующей областью значения затухания связаны соотношением µ1=-µ2. Кроме того, измеренные значения проекции в уравнении (1) могут быть заданы разностью, вычисленной на этапе S6, которая вычисляется как измеренные данные линейного интегрирования на этапе S2 за минусом прямоспроецированной функции затухания на этапе S3.
, описывающей интересующую область. Для моделирования области между контуром тела и интересующей областью значения затухания связаны соотношением µ1=-µ2. Кроме того, измеренные значения проекции в уравнении (1) могут быть заданы разностью, вычисленной на этапе S6, которая вычисляется как измеренные данные линейного интегрирования на этапе S2 за минусом прямоспроецированной функции затухания на этапе S3.
Другими словами, предложен аппарат для обследования, в котором может создаваться многогранная модель, например, контура человеческого тела. Моделирование выполняется итеративным образом, при котором оптимизируются координаты вершин многогранной модели и функции затухания или значение затухания модели. Таким образом, функция или значение затухания не обязательно должны быть известны заранее.
Возможно, что нет принципиальных ограничений на геометрическую компоновку при сборе данных, и возможно, что моделирование даже способно реконструировать несколько невыпуклых объектов и контуров тела. Кроме применения в управлении биопсией, возможные клинические применения включают в себя формирование высококонтрастных изображений коронарных вен и желудочков при вращательной ангиографии, формирование ортопедических изображений костей и суставов и реконструкцию деформируемых медицинских приборов. Кроме того, этот аспект способа согласно изобретению можно легко применить в области цифровой субтракционной ангиографии. Поскольку базовый алгоритм реконструкции имеет итеративный характер, изобретение может оказаться полезным для множества различных подходов к сбору данных, таких как использование вращательных перемещений, перемещений по двум осям, а также вариантов сбора данных, которые геометрически ограничены только несколькими проекциями.
Интересующий объект можно моделировать в виде многогранника с поверхностной сеткой из треугольников. Хотя топология модели во время итерации не изменяется, данный способ позволяет легко реконструировать даже невыпуклые формы. Часто для инициализации итеративной процедуры и улучшения сходимости алгоритма используют специализированную модель, например модель тела, сердца, сосудов или костей. Однако данный способ также позволяет реконструировать произвольные многогранные структуры из простых сферических начальных сеток путем стабилизации реконструкции с помощью подходящих членов регуляризации.
В алгоритме используется схема градиентного снижения, обеспечивающая минимизацию целевой функции, которая состоит из члена соответствия данных и дополнительных штрафных членов для стабилизации процедуры реконструкции. При выполнении алгоритма оптимизируют как вершины многогранного объекта, так и его значение затухания.
Результатом может стать значение затухания вместе с трехмерной моделью поверхности физической структуры, изображение которой было сформировано рентгеновскими лучами. По сравнению с технологиями реконструкции на воксельной основе дополнительная сегментация здесь не требуется. Следовательно, реконструированную модель можно немедленно использовать для визуализации и дополнительных вычислений (объема сердца, толщины костей, диаметра сосуда) без какой-либо дополнительной обработки изображения.
Согласно другому примерному варианту настоящего изобретения многогранная модель содержит поверхностную сетку из треугольников. Следует заметить, что настоящее изобретение не ограничивается поверхностными сетками из треугольников. Однако указанная поверхностная сетка из треугольников может обеспечить быстрое и эффективное моделирование.
Согласно другому примерному варианту настоящего изобретения вычислительный блок дополнительно выполнен с возможностью выполнения этапа стабилизации реконструкции путем добавления по меньшей мере одного штрафного члена к члену ошибки расхождения данных.
Следует заметить, что в случае когда начальная модель обладает достаточным качеством, регуляризация или стабилизация могут не потребоваться. Кроме того, для стабилизации и регуляризации можно использовать другие штрафные члены.
Указанная стабилизация позволяет избежать вырождение модели.
Например, согласно другому примерному варианту настоящего изобретения, по меньшей мере, один штрафной член выбирают из группы, содержащей отклонение вершин от барицентра соседей, отклонение площади грани от средней площади треугольника в сетке, штрафной член для соприкасающихся треугольников и отклонение от правильных треугольников.
Кроме того, согласно другому примерному варианту настоящего изобретения значение затухания фиксируют во время оптимизации координат многогранной модели, когда выполняется минимизация разности между измеренными значениями проекции и вычисленными значениями прямой проекции.
Согласно другому примерному варианту настоящего изобретения минимизация содержит схему градиентного снижения.
Согласно еще одному примерному варианту настоящего изобретения координаты многогранной модели фиксируют во время оптимизации значения затухания, когда определяют минимум следующей функции:

где  , или в случае составной многогранной модели вычисляют решение линейной системы
, или в случае составной многогранной модели вычисляют решение линейной системы

Согласно следующему примерному варианту настоящего изобретения аппарат для обследования выполнен в виде одного из: трехмерного вычислительного томографического аппарата, трехмерного поворотного рентгеновского аппарата и аппарата для формирования рентгеновских изображений в ортопедии. Например, аппаратом для обследования является система с С-образным рычагом.
Согласно другому примерному варианту настоящего изобретения аппарат для обследования выполнен с возможностью применения в области цифровой субтракционной ангиографии.
Согласно еще одному примерному варианту настоящего изобретения функция затухания является кусочно-постоянной.
Согласно другому примерному варианту настоящего изобретения реконструкцию данных выполняют во время или после сбора данных проецирования интересующего объекта, причем результат реконструкции визуализируют во время или после сбора данных.
Согласно другому примерному варианту настоящего изобретения визуализированный результат содержит, по меньшей мере, одно из: промежуточного изображения и промежуточной функции затухания.
Например, промежуточную модель поверхности можно визуализировать или анализировать иным образом после каждого этапа оптимизации или после предварительно определенного количества этапов оптимизации во время итеративной реконструкции. Кроме того, или как альтернативный вариант, функцию затухания или просто значение затухания можно визуализировать или анализировать иным образом независимо от промежуточной модели поверхности.
Таким образом, промежуточные результаты можно оценивать во время итеративной реконструкции, что позволяет корректировать реконструкцию после получения проанализированных результатов. Указанный анализ можно выполнять путем сравнения промежуточного результата с проекцией, обеспечивая, таким образом, обратную связь по качеству модели. Другими словами, можно отслеживать качество сходимости итеративной реконструкции, например, визуальным образом.
Согласно другому примерному варианту настоящего изобретения пользовательский интерфейс может быть обеспечен функцией визуализации промежуточного результата реконструкции данных, например вышеописанной многогранной моделью интересующего объекта, где визуализация и реконструкция данных выполняются во время сбора данных проецирования интересующего объекта.
Указанный пользовательский интерфейс может содержать дисплей или монитор для визуализации промежуточного результата. После каждой итерации поверхность модели отображают таким образом, что сходимость итеративной реконструкции может графически (визуально) отслеживаться пользователем. Путем проецирования промежуточной модели на каждом или после каждого этапа итерации на одной проекции можно обеспечить визуальную обратную связь, относящуюся к качеству модели.
Таким образом, в отличие от сегментации изображения может быть создана не только модель поверхности, которая оптимально адаптирована (к интересующему объекту), но также и соответствующий (промежуточный) коэффициент поглощения или функция затухания, так что все линейные интегралы по объекту, относящиеся к проекции, будут иметь минимальное отличие от измеренных данных. Указанный коэффициент или функция не могут быть обеспечены с помощью обычного процесса сегментации.
Согласно другому примерному варианту настоящего изобретения визуализированный промежуточный результат содержит, по меньшей мере, одно из: промежуточного изображения и промежуточной функции затухания.
Согласно другому примерному варианту настоящего изобретения реконструкция данных является итеративной реконструкцией данных.
Согласно другому примерному варианту настоящего изобретения может быть обеспечен способ для создания многогранной модели интересующего объекта, причем многогранная модель содержит вершины, имеющие координаты, и многогранная модель имеет топологию, соединяющую, по меньшей мере, одну из вершин с гранью поверхности многогранной модели, и при этом способ содержит этапы попеременной оптимизации координат многогранной модели и оптимизации функции затухания многогранной модели во время реконструкции данных, в результате чего получают оптимизированное значение затухания вместе с моделью поверхности интересующего объекта.
Наконец, способ согласно изобретению завершается на этапе S7 комбинированной визуализацией реконструированной поверхностной сетки, как результата реконструкции однородного многогранника, на реконструкцию интересующей области.
На фиг.4 показан пример однородного многогранника 400. Заметим, что поверхность указанного многогранника также может быть показана, по меньшей мере, частично прозрачной или полупрозрачной, чтобы обеспечить улучшенную взаимосвязь между внутренними структурами тела, которые могут быть визуализированы на плоскостях 410, 420, 430, и внешним контуром тела.
На фиг.5, 6 и 7 показаны примеры для другого способа иллюстрации внутренних структур вместе с внешним контуром.
На фиг.5 показана плоскость 410, представляющая аксиальную проекцию. На указанной плоскости показана реконструкция интересующей области 411, области 412 между интересующей областью и контуром тела, которая получилась из усеченных проекций, и линия 413, причем линия 413 представляет внешний контур тела.
Вдобавок, на фиг. 5 схематически показано биопсийное устройство 500. Поскольку известно, в какую точку 414 тела введено биопсийное устройство, под каким углом это биопсийное устройство движется вперед и на какое расстояние оно введено, можно точно оценить текущее местоположение острия биопсийного устройства внутри интересующей области относительно внешнего контура человеческого тела.
Кроме того, поскольку можно интраоперационно создать новые сканы, врачу может быть дополнительно предоставлено несколько новых реконструкций кроме информации о механических параметрах (длина, угол, местоположение), причем эти реконструкции также могут показывать биопсийное устройство внутри человеческого тела.
На фиг.6 показана плоскость 420, представляющая корональный вид. Также здесь показаны интересующая область 421 внутри тела, область 422 вне интересующей области, но внутри контура тела, а также линия 423, которая представляет внешний контур тела.
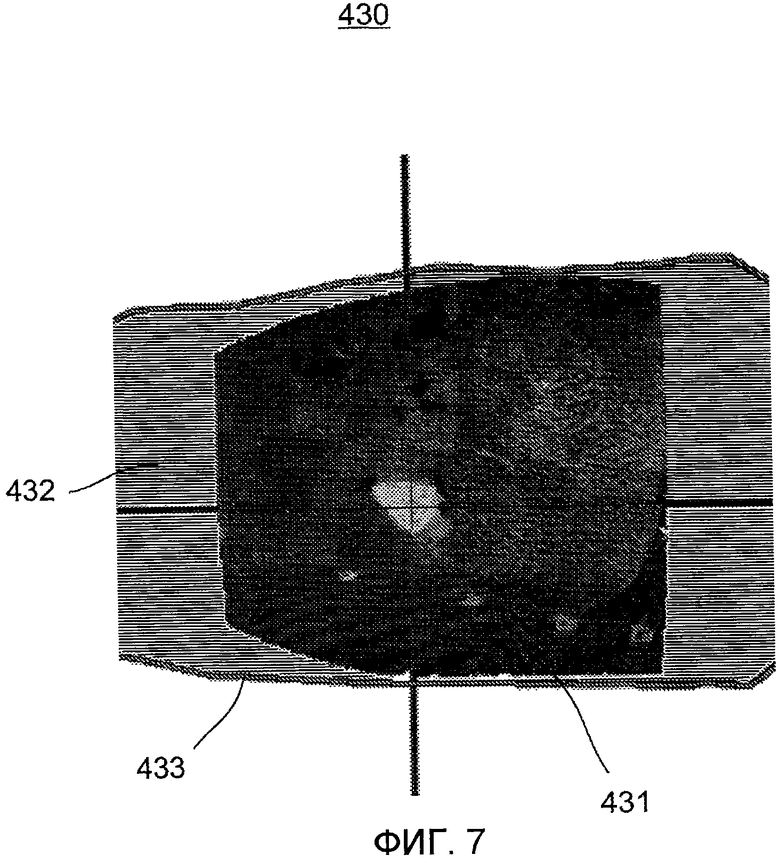
На фиг.7 показана плоскость 430, представляющая сагиттальный вид. Интересующая область обозначена ссылочной позицией 431. Область, для которой нет достаточной информации о проекции, то есть окружающая область 431, обозначена ссылочной позицией 432. Контур тела, созданный в виде внешней линии реконструированного однородного многогранника, обозначен ссылочной позицией 433.
Следует заметить, что термин «содержащий» не исключает другие элементы или этапы, а единственное число не исключает множества элементов. Также элементы, описанные в связи с другими вариантами, могут встречаться в различных сочетаниях.
Следует также заметить, что ссылочные позиции в пунктах формулы изобретения не следует трактовать как ограничение объема формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИЗУАЛИЗАЦИЯ ТРЕХМЕРНЫХ ИЗОБРАЖЕНИЙ В КОМБИНАЦИИ С ДВУМЕРНЫМИ ПРОЕКЦИОННЫМИ ИЗОБРАЖЕНИЯМИ | 2007 |
|
RU2471239C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ВИЗУАЛИЗАЦИИ МЯГКИХ ТКАНЕЙ ТЕЛА С ИСПОЛЬЗОВАНИЕМ ПРОЕКЦИИ РЕНТГЕНОВСКОГО ИЗЛУЧЕНИЯ И ОПТИЧЕСКОЙ ТОМОГРАФИИ | 2012 |
|
RU2618912C2 |
| УСТРОЙСТВО, СПОСОБ И СИСТЕМА ДЛЯ РЕКОНСТРУКЦИИ 3D-МОДЕЛИ ОБЪЕКТА | 2015 |
|
RU2642167C2 |
| СПОСОБ ОБРАБОТКИ ИЗОБРАЖЕНИЙ, УСТРОЙСТВО ОБРАБОТКИ ИЗОБРАЖЕНИЙ И НОСИТЕЛЬ ДАННЫХ | 2018 |
|
RU2709437C1 |
| ВИЗУАЛИЗАЦИЯ РЕКОНСТРУКЦИИ 3D-СЦЕНЫ С ИСПОЛЬЗОВАНИЕМ СЕМАНТИЧЕСКОЙ РЕГУЛЯРИЗАЦИИ НОРМАЛЕЙ TSDF ПРИ ОБУЧЕНИИ НЕЙРОННОЙ СЕТИ | 2023 |
|
RU2825722C1 |
| РЕКОНСТРУКЦИЯ ИЗОБРАЖЕНИЯ ИЗУЧАЕМОЙ ОБЛАСТИ | 2010 |
|
RU2568321C2 |
| УДАЛЕНИЕ АРТЕФАКТОВ ИЗОБРАЖЕНИЙ ПРИ SENSE-ВИЗУАЛИЗАЦИИ | 2016 |
|
RU2730431C2 |
| ТОМОГРАФИЧЕСКИЙ АППАРАТ И СПОСОБ РЕКОНСТРУКЦИИ ЕГО ТОМОГРАФИЧЕСКОГО ИЗОБРАЖЕНИЯ | 2015 |
|
RU2655091C2 |
| СПОСОБ ПОЛУЧЕНИЯ ТОМОГРАФИЧЕСКОГО ИЗОБРАЖЕНИЯ МЕТОДОМ МАГНИТНОЙ ИНДУКЦИОННОЙ ТОМОГРАФИИ | 1996 |
|
RU2129406C1 |
| СПОСОБ И СИСТЕМА ДЛЯ УТОЧНЕНИЯ ПОЗЫ КАМЕРЫ С УЧЕТОМ ПЛАНА ПОМЕЩЕНИЯ | 2022 |
|
RU2794441C1 |
Изобретение относится к области формирования медицинских изображений. Техническим результатом является улучшение управления для наведения биопсийной иглы в нужное место в ткани для усовершенствованного управления биопсией. Предлагается 3D-реконструкция тела и контура тела из трансверсально усеченных проекций с использованием многогранной модели объекта. Возможные клинические применения относятся к области направленной биопсии в системах сбора данных, оборудованных плоскопанельным детектором, когда нельзя избежать усеченных проекций в протоколах сканирования грудной клетки и брюшной полости. В результате, например, вращательного движения создается трехмерная (3D) объемная реконструкция и реконструкция сетки поверхности для очертания тела пациента с последующей одновременной визуализацией, чтобы помочь врачу в управлении биопсийным устройством и в оценке расстояния от кожи пациента до интересующей ткани внутри реконструированного объема. 5 н. и 2 з.п. ф-лы, 7 ил.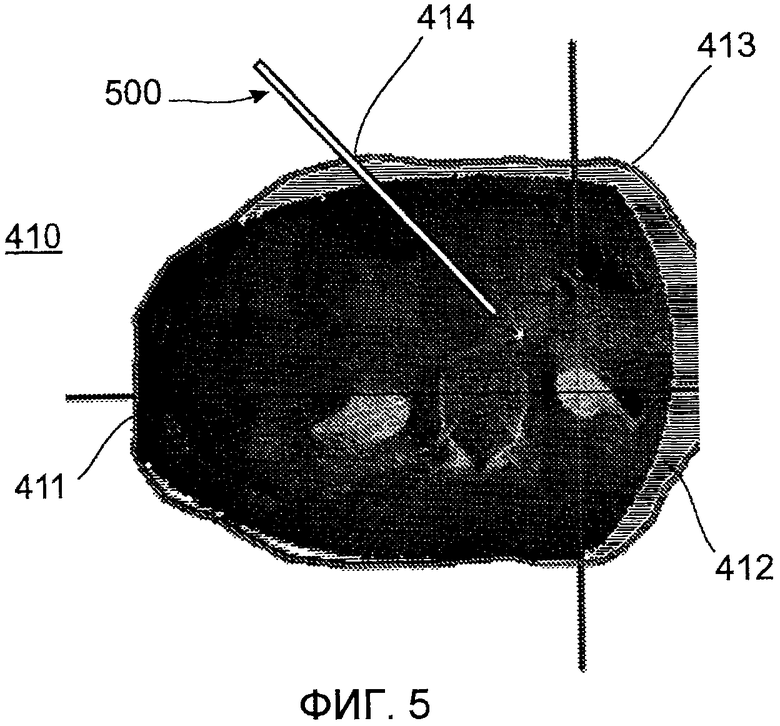
1. Аппарат (100) для обследования для 3D-реконструкции интересующей области тела и внешнего контура тела,
при этом аппарат для обследования содержит:
устройство (101) сбора данных для сбора данных проецирования интересующей области,
вычислительный блок (112), выполненный с возможностью создания 3D-реконструкции интересующей области (411, 421, 431) и 3D-реконструкции однородного многогранника (400, 413, 423, 433), представляющего внешний контур тела, на основе усеченных проекций и создания комбинированной 2D-визуализации реконструированной интересующей области и реконструированного многогранника на плоскости через тело,
устройство отображения для отображения комбинированной визуализации.
2. Аппарат (100) для обследования по п.1, в котором реконструкция однородного многогранника (400, 413, 423, 433) включает в себя прямое проецирование реконструированной функции затухания интересующей области, вычитание результата из собранных данных проецирования для создания целевой функции, прямое проецирование многогранной модели, состоящей из субмодели контура тела и субмодели интересующей области с функцией постоянного затухания внутри каждой из субмоделей, и оптимизацию многогранной модели путем минимизации разности между прямо спроецированной моделью и целевой функцией.
3. Пользовательский интерфейс для визуализации 3D-реконструкции интересующей области тела и внешнего контура тела, причем пользовательский интерфейс выполнен с возможностью создания 3D-реконструкции интересующей области (411, 421, 431) и 3D-реконструкции однородного многогранника (400, 413, 423, 433), представляющего внешний контур тела, на основе усеченных проекций и создания комбинированной 2D-визуализации реконструированной интересующей области и реконструированного многогранника на плоскости через тело, и выполнен с возможностью отображения комбинированной визуализации, при этом реконструкции данных и визуализации выполняют после сбора данных проецирования тела.
4. Способ 3D-реконструкции интересующей области тела и внешнего контура тела, при этом способ содержит этапы, на которых:
реконструируют 3D-представление интересующей области на основе усеченных проекций, реконструируют 3D-представление однородного многогранника, представляющего внешний контур тела, на основе усеченных проекций, оптимизируют реконструкции после сбора данных проецирования, и визуализируют 2D-представление плоскости через тело, включая интересующую область и контур тела.
5. Способ по п.4, в котором этап реконструкции 3D-реконструкции однородного многогранника включает в себя этапы, но которых: осуществляют прямое проецирование реконструированной функции затухания интересующей области, вычитают результат из собранных данных проецирования для создания целевой функции, осуществляют прямое проецирование многогранной модели, состоящей из субмодели контура тела и субмодели интересующей области с функцией постоянного затухания внутри каждой из субмоделей, и при этом этап оптимизации реконструкций после сбора данных проецирования включает в себя оптимизацию многогранной модели путем минимизации разности между прямо спроецированной моделью и целевой функцией.
6. Машиночитаемый носитель, на котором хранится компьютерная программа для 3D-реконструкции интересующей области тела и внешнего контура тела;
при этом машиночитаемый носитель при выполнении процессором предписывает процессору выполнять этапы:
реконструкции 3D-представления интересующей области на основе усеченных проекций,
реконструкции 3D-представления однородного многогранника, представляющего внешний контур тела, на основе усеченных проекций, оптимизации реконструкций после сбора данных проецирования, приводящей к оптимизированной 2D-визуализации плоскости через тело, включая интересующую область и внешний контур тела.
7. Устройство (200) обработки изображения для 3D-реконструкции интересующей области тела и внешнего контура тела, причем устройство обработки изображения выполнено с возможностью:
реконструкции 3D-представления интересующей области на основе усеченных проекций,
реконструкции 3D-представления однородного многогранника, представляющего внешний контур тела, на основе усеченных проекций, оптимизации реконструкций после сбора данных проецирования, приводящей к оптимизированной 2D-визуализации плоскости через тело, включая интересующую область и внешний контур тела.
| Frederique С | |||
| et al | |||
| Anatomical Data Fusion for Quantitative Reconstruction in Myocardial for Tomoscintigraphy Using a Spline Model of the Thorax Organs//IEEE Transaction on biomedical engineering | |||
| Приспособление для плетения проволочного каркаса для железобетонных пустотелых камней | 1920 |
|
SU44A1 |
| Charles S | |||
| et al | |||
| Polygonal and Polyhedral Countour Reconstruction in Computed Tomography//IEEE Transaction on image | |||

