Изобретение относится к области авиации и может быть использовано для электропитания привязных летательных аппаратов длительного времени функционирования, оснащенных электрическими двигателями, и предназначенных для размещения на них бортового оборудования полезной нагрузки.
Известено устройство электроснабжения воздушного летательного аппарата (RU 2554723 С1, 27.06.2015), в котором электроснабжение воздушного летательного аппарата осуществляют повышенным напряжением 0,1…10 кВ постоянного тока путем преобразования напряжения источника питания на земле по напряжению с 12…380 В до 0,1…10 кВ и передачи по линии электропередачи с дальнейшим преобразованием напряжения 0,1…10 кВ до 12…380 В.
Недостатком данного технического решения является то, что подключение бортового оборудования воздушного летательного аппарата приводит к увеличению потребляемого тока и падению напряжения в линии электропередачи. В этом случае понижающий преобразователь, установленный на борту, должен осуществлять стабилизацию выходного напряжения, что приводит к увеличению габаритных размеров и массы устройства.
Известено устройство для электроснабжения привязного аэростата (RU 2449927 С1, 10.05.2012), в котором электропитание бортового электрооборудования осуществляется от наземного источника питания 3×380 В, 50 Гц с преобразованием в постоянное напряжение 500…900 В, которое передается по канат-кабелю на преобразователь, установленный на борту аэростата, понижающий высокое напряжение до 20…40 В постоянного тока. Уровень напряжения, подводимого к канат-кабелю, регулируется в первом преобразователе за счет силового регулирующего элемента в зависимости от протекающего в канат-кабеле тока в целях компенсации падения напряжения и обеспечения узкого диапазона изменений входного напряжения бортового понижающего преобразователя. Данное техническое решение является наиболее близким к заявляемому техническому решению по способу регулирования выходного напряжения в наземном преобразователе.
Недостатком данного технического решения является то, что мощность, потребляемая бортовым оборудованием аэростата, имеет постоянную величину, которая изменяется в узких пределах. При известной величине электрического сопротивления канат-кабеля, которая также является неизменной, процесс управления выходным напряжением, подводимым к канат-кабелю, сводится к его регулированию в небольших пределах. Эксплуатация летательных аппаратов, оснащенных электрическими двигателями, и предназначенных для размещения на них бортового оборудования полезной нагрузки, подразумевает ряд режимов функционирования:
- взлет;
- удержание в заданной точке (высота подвеса и координаты) вне зависимости от допустимой ветровой нагрузки;
- плановая посадка;
- аварийная посадка;
- изменение режимов работы полезной нагрузки.
Каждый из указанных режимов функционирования летательного аппарата предполагает определенную мощность потребления электрических двигателей и установленного на нем оборудования полезной нагрузки, которая может непрерывно изменяться в широких пределах. Если изменения мощности потребления для оборудования полезной нагрузки и систем управления и навигации могут быть в пределах 5…10%, то изменения мощности потребления электронных регуляторов скорости для управления режимами электрических двигателей могут варьироваться в пределах 0…100%. Кроме того, бортовое электропитание должно быть стабилизировано с высокой точностью и с низким уровнем пульсаций напряжения.
Еще одним недостатком данного технического решения является то, что схема управления силовым регулирующим элементом реализована по принципу аналогового управления, что не позволяет добиться широких пределов регулирования и высокой точности выходного напряжения в наземном преобразователе, особенно для управления мощной нагрузкой.
Задачей предлагаемого изобретения является увеличение мощности, предаваемой на борт летательного аппарата, повышение стабильности передаваемого напряжения от наземного преобразователя независимо от мощности потребления нагрузки, повышение точности выходного напряжения бортового преобразователя при минимальных уровнях пульсаций, а также упрощение его конструкции.
При решении поставленной задачи достигаемый технический результат заключается в повышении КПД передачи электроэнергии с земли на борт, снижении габаритных размеров и массы бортового преобразователя, увеличении уровня безопасности при эксплуатации и повышении надежности.
Технический результат достигается тем, что устройство для электропитания привязного летательного аппарата содержит размещенные на наземном объекте источник электроэнергии, наземный преобразователь, кабель-трос с токопроводящими жилами, предназначенный для передачи электроэнергии от наземного преобразователя на упомянутый летательный аппарат, а также размещенные на летательном аппарате бортовой преобразователь и резервную аккумуляторную батарею для электропитания бортового оборудования летательного аппарата; силовой вход наземного преобразователя подключен к источнику электроэнергии, а к силовым выходным клеммам «плюс» и «минус» наземного преобразователя подключены соответственно входные клеммы «плюс» и «минус» кабель-троса, к выходным клеммам которого подключен силовой вход бортового преобразователя, к силовым выходам которого подключены устройства бортового электрооборудования летательного аппарата. В наземный преобразователь, содержащий блок преобразования, введены силовой регулирующий модуль, имеющий два силовых вывода и один управляющий вывод, а также система управления, содержащая датчик тока, контроллер, широтно-импульсный модулятор и панель управления и индикации; силовой вход силового регулирующего модуля подключен к выходной клемме «плюс» блока преобразования, а силовой выход подключен к первому силовому выводу датчика тока, второй силовой вывод которого подключен к выходной клемме «плюс» наземного преобразователя; выход датчика тока подключен к входу контроллера, который имеет интерфейс ввода/вывода, подключенный к панели управления и индикации, и выход, подключенный к входу широтно-импульсного модулятора, выход которого подключен к управляющему входу силового регулирующего модуля. В бортовой преобразователь введены изолированный модуль преобразования и электронный коммутатор питания, имеющий три силовых вывода; входные клеммы «плюс» и «минус» изолированного модуля преобразования подключены соответственно к клеммам «плюс» и «минус» кабель-троса, а выходная клемма «плюс» подключена к первому силовому выводу электронного коммутатора, второй силовой вывод которого подключен к клемме «плюс» резервной аккумуляторной батареи, а третий силовой вывод подключен к клемме «плюс» бортового электрооборудования летательного аппарата; выходная клемма «минус» изолированного модуля преобразования и клеммы «минус» резервной аккумуляторной батареи и бортового электрооборудования летательного аппарата соединены между собой.
В соответствии с предложенным техническим решением указанная задача решается тем, что согласно заявляемому техническому решению электроэнергию от наземного источника питания промышленной или автономной трехфазной сети переменного тока 380 В частотой 50 Гц преобразуют в напряжение постоянного тока высокого уровня (например, 400…1000 В) с высоким уровнем стабилизации, передают по кабель-тросу на борт летательного аппарата, преобразуют с высокой точностью и при минимальных уровнях пульсаций в постоянное напряжение постоянного тока низкого уровня (например, 24…50 В) для электропитания электрических двигателей летательного аппарата, а также всего комплекса бортового оборудования, включая аппаратуру полезной нагрузки и системы управления и навигации.
В соответствии с предложенным техническим решением указанная задача решается также тем, что согласно заявляемому техническому решению в наземный преобразователь, содержащий блок преобразования, введены силовой регулирующий модуль, имеющий два силовых вывода и один управляющий вывод, а также система управления, содержащая датчик тока, контроллер, широтно-импульсный модулятор и панель управления и индикации; силовой вход силового регулирующего модуля подключен к выходной клемме «плюс» блока преобразования, а силовой выход подключен к первому силовому выводу датчика тока, второй силовой вывод которого подключен к выходной клемме «плюс» наземного преобразователя; выход датчика тока подключен к входу контроллера, который имеет интерфейс ввода/вывода, подключенный к панели управления и индикации, и выход, подключенный к входу широтно-импульсного модулятора, выход которого подключен к управляющему входу силового регулирующего модуля.
В соответствии с предложенным техническим решением указанная задача решается также тем, что согласно заявляемому техническому решению в бортовой преобразователь введены изолированный модуль преобразования (входы и выходы модуля разделены изоляционным барьером) с фиксированным коэффициентом преобразования и высоким КПД, а также электронный коммутатор питания; входные клеммы «плюс» и «минус» изолированного модуля преобразования подключены соответственно к клеммам «плюс» и «минус» кабель-троса, а выходная клемма «плюс» подключена к первому силовому выводу электронного коммутатора питания, второй силовой вывод которого подключен к клемме «плюс» резервной аккумуляторной батареи, а третий силовой вывод подключен к клемме «плюс» бортового электрооборудования летательного аппарата.
Сущность предлагаемого изобретения поясняется чертежом.
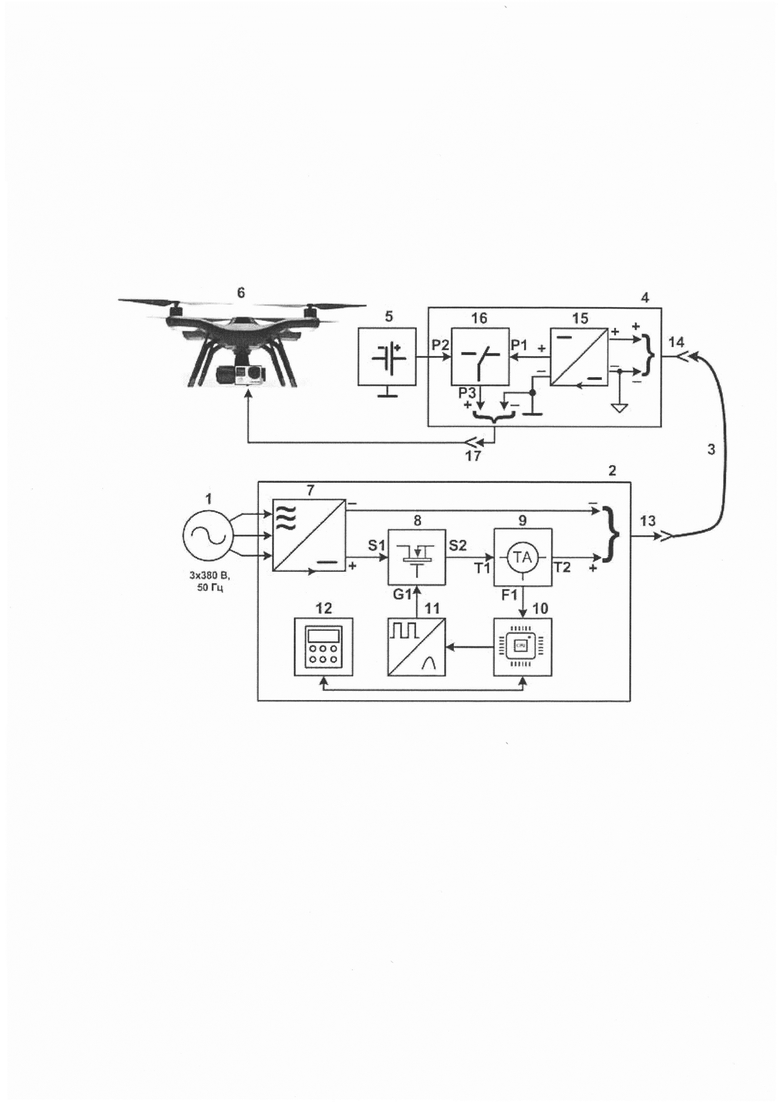
На чертеже представлена общая структурная схема устройства для электропитания привязного летательного аппарата в соответствии с заявляемым техническим решением.
Электропитание от внешнего источника 1 промышленной или автономной сети по трехпроводной линии поступает в блок преобразования 7 наземного преобразователя 2, в который введены силовой регулирующий модуль 8 и система управления, содержащая датчик тока 9, контроллер 10, широтно-импульсный модулятор 11 и панель управления и индикации 12. Выходная клемма «минус» блока преобразования 7 подключена к клемме «минус» выходного разъема 13, выходная клемма «плюс» блока преобразования 7 подключена к силовому входу S1 силового регулирующего модуля 8, а силовой выход S2 подключен к первому силовому выводу Т1 датчика тока 9, второй силовой вывод Т2 которого подключен к клемме «плюс» выходного разъема 13 наземного преобразователя 2; выход F1 датчика тока 9 подключен к входу контроллера 10, выход которого подключен к входу широтно-импульсного модулятора 11, выход которого подключен к управляющему входу G1 силового регулирующего модуля 8; контроллер 10 посредством интерфейса ввода/вывода подключен к панели управления и индикации 12.
Выход наземного преобразователя 2 через выходной разъем 13 подключен к входным клеммам кабель-троса 3 в соответствии с полярностью, выходные клеммы которого через входной разъем 14 подключены к входным клеммам «плюс» и «минус» соответственно изолированного модуля преобразования 15 бортового преобразователя 4. Первый силовой вывод Р1 электронного коммутатора питания 16 подключен к выходной клемме «плюс» изолированного модуля преобразования 15, второй силовой вывод Р2 подключен к выводу «плюс» резервной аккумуляторной батареи 5, а третий силовой вывод Р3 подключен к клемме «плюс» выходного разъема 17 бортового преобразователя 4. Выходная клемма «минус» изолированного модуля преобразования 15, вывод «минус» резервной аккумуляторной батареи 5 и клемма «минус» выходного разъема 17 бортового преобразователя 4 соединены между собой. Устройства бортового электрооборудования летательного аппарата 6 подключены к клеммам «плюс» и «минус» соответственно выходного разъема 17 бортового преобразователя 4.
Существенными отличиями заявляемого технического решения являются следующие:
- выходное напряжение наземного преобразователя 2 регулируется в широких пределах и с высокой точностью по принципу цифрового управления за счет введения силового регулирующего модуля 8, датчика тока 9 и схемы управления, содержащей контроллер 10, широтно-импульсный модулятор 11 и панель управления и индикации 12:
- бортовой преобразователь 4 содержит изолированный модуль преобразования 15 с фиксированным коэффициентом преобразования и высоким коэффициентом стабилизации, а также электронный коммутатор питания 16 для автоматического переключения электропитания бортового оборудования летательного аппарата 6 с основного режима от бортового преобразователя 4 на аварийный режим от резервной аккумуляторной батареи 5.
Заявляемое устройство работает следующим образом.
Электропитание от внешнего источника 1 промышленной или автономной трехфазной сети переменного тока 380 В частотой 50 Гц поступает в блок преобразования 7 наземного преобразователя 2, который преобразует входное переменное напряжение в выходное напряжение постоянного тока высокого уровня (например, 400…1000 В) для передачи по кабель-тросу 3 на борт летательного аппарата 6.
В целях компенсации падения напряжения в кабель-тросе 3 в зависимости от изменений мощности потребления бортового оборудования летательного аппарата 6 осуществляется контроль и автоматическое регулирование уровня выходного напряжения наземного преобразователя 2 для поддержания определенно заданного значения напряжения на входе бортового преобразователя 4, которые осуществляет система управления наземного преобразователя 2, реализованная по схеме обратной связи в зависимости от тока протекающего в кабель-тросе 3. В состав системы управления наземного преобразователя 2 входят силовой регулирующий модуль 8, содержащий транзисторы MOSFET и драйвер управления; датчик тока 9 на основе линейного датчика Холла; контроллер 10 на базе микропроцессора с оперативным запоминающим устройством и постоянным (энергонезависимым) запоминающим устройством, а также интерфейсом ввода/вывода; широтно-импульсный модулятор 11 и панель управления и индикации 12. Система управления реализована на аппаратно-программном уровне и позволяет с высокой точностью осуществлять процесс постоянного контроля и регулирования выходного напряжения. Программное обеспечение системы управления, установленное в постоянное запоминающее устройство контроллера 10, содержит базу данных и алгоритм выбора параметров для кабель-троса 3 и осуществляет посредством микропроцессора расчет необходимых характеристик управления для автоматического регулирования.
С помощью панели управления и индикации И, подключенной через интерфейс ввода/вывода к контроллеру 10, осуществляется ввод и контроль начальных параметров электропитания в зависимости от характеристик используемого кабель-троса 3, таких как длина линии и площадь сечения медной жилы, и предельно допустимой мощности потребления бортового оборудования летательного аппарата 6. В режиме функционирования наземного преобразователя 2 на панели управления и индикации 11 отображаются текущие значения напряжения и потребляемого тока.
Выход F1 датчика тока 9 формирует аналоговый сигнал, пропорциональный значению выходного тока, протекающего в цепи кабель-троса 3 и бортового преобразователя 4, который поступает на вход контроллера 10 для формирования на его выходе цифрового сигнала управления пшротно-импульсным модулятором 11. Выходной сигнал широтно-импульсного модулятора 11 поступает на управляющий вход G1 силового регулирующего модуля 8 и посредством встроенного в него драйвера осуществляет управление режимом работы мощных транзисторов MOSFET.
Выходное напряжение высокого уровня от наземного преобразователя 2 посредством выходного разъема 13 передают через кабель-трос 3 на входной разъем 14 бортового преобразователя 4. Кабель-трос 3 может быть выполнен в виде электрического кабеля с повышенной термоустойчивостью в оболочке из силиконовой резины, внутри которой уложены два многожильных токопроводящих медных провода с изоляцией из силиконовой резины вокруг кевларовой нити. Возможен вариант включения в состав кабель-троса оптического волокна для организации информационного канала связи между наземным комплексом оборудования и летательным аппаратом 6. Выбор параметров токопроводящих жил кабель-троса 3 осуществляется с учетом предельно допустимой силы тока в медных проводах и минимальных потерях в режиме максимально потребляемой бортовым оборудованием мощности, при которой не происходит нагрев оболочки кабеля выше предельно допустимой температуры эксплуатации.
Бортовой преобразователь 4, установленный на летательном аппарате 6, преобразует входное напряжение постоянного тока высокого уровня (например, 400 В) в выходное напряжение постоянного тока низкого уровня с постоянным коэффициентом преобразования (например, 1:8). Стабилизация выходного напряжения низкого уровня, (например, 50 В) для электропитания бортового оборудования летательного аппарата 6 при любых изменениях мощности потребления оборудования в различных режимах функционирования осуществляется посредством поддержания определенно заданного стабильного напряжения высокого уровня (например, 400 В) на входе бортового преобразователя 4, которая выполняется наземным преобразователем 2.
Напряжение высокого уровня, полученное от наземного блока 2 по кабель-тросу 3, поступает на входной разъем 14 бортового преобразователя 4. Клеммы «плюс» и «минус» входного разъема 14 подключены соответственно к клеммам «плюс» и «минус» изолированного модуля преобразования 15 бортового преобразователя 4.
Параллельное соединение изолированных модулей преобразования по входу и выходу позволяет добиться высокой выходной мощности потребления. Количество модулей определяет суммарную мощность потребления для функционирования бортового оборудования летательного аппарата 6. Ввиду использования стабильного входного напряжения высокого уровня от наземного преобразователя 2 нет необходимости использовать в бортовом преобразователе 4 входные и выходные схемы фильтрации. В качестве изолированных модулей преобразования 15 могут быть использованы изолированные нерегулируемые преобразователи с постоянным коэффициентом преобразования, которые обеспечивают с высокой точностью стабильное выходное напряжение постоянного тока низкого уровня с минимальным уровнем пульсаций.
Резервная аккумуляторная батарея 5, установленная на борту летательного аппарата 6, предназначена для безопасности функционирования летательного аппарата 6 и проведения экстренной посадки в случае нарушения подачи энергии от внешнего источника электропитания, а также при возникновении неисправностей в наземном преобразователе 2, кабель-тросе 3 или бортовом преобразователе 4. Электронный коммутатор питания 16 в бортовом преобразователе 4 обеспечивает подачу электропитания на бортовое оборудование летательного аппарата 6 от изолированного модуля преобразования 15 при нормальном функционировании заявляемого устройства для электропитания летательного аппарата и автоматический переход на электропитание от резервной аккумуляторной батареи 5 при возникновении аварийной ситуации (отсутствие электропитания на выходных клеммах изолированного модуля преобразования 15). Выходная клемма «плюс» изолированного модуля преобразования 15 подключена к первому силовому выводу Р1 электронного коммутатора питания 16, вывод «плюс» резервной аккумуляторной батареи 5 подключен ко второму силовому выводу Р2, а третий силовой вывод Р3 подключен к клемме «плюс» выходного разъема 17 бортового преобразователя 4. Выходная клемма «минус» изолированного модуля преобразования 15, вывод «минус» резервной аккумуляторной батареи и клемма «минус» выходного разъема 17 бортового преобразователя 4 соединены между собой.
Пример реализации
Система передачи энергии земля-борт.
Система предназначена для реализации проектов по созданию стационарных и мобильных многофункциональных привязных высотных платформ длительного применения на базе беспилотных летательных аппаратов, оснащенных электрическими двигателями. Система реализует процесс передачи электроэнергии большой мощности (до 5 кВт) от наземного блока преобразования к бортовому модулю, установленному на мультикоптере, по соединительному кабель-тросу. Система осуществляет процесс поддержания стабильного рабочего напряжения на борту летательного аппарата с точностью до 0,2% вне зависимости от тока потребления, но не более максимально допустимой мощности потребления. В состав Системы входят:
- наземный блок преобразования энергии;
- кабель-трос длиной 100 м, уложенный на катушку лебедки;
- бортовой преобразователь.
Электропитание от внешнего источника промышленной или автономной (дизель генератор) 3-фазной сети переменного тока 380 В частотой 50 Гц поступает в наземный блок преобразования энергии, который преобразует электроэнергию в напряжение 400…500 В постоянного тока для передачи посредством кабель-троса на бортовой преобразователь, установленный на летательном аппарате. Наземный блок преобразования энергии осуществляет стабилизацию выходного напряжения с точностью до 0,5% и низким уровнем пульсаций (не более 500 мВ) и автоматическое регулирование выходного напряжения в зависимости от изменений мощности потребления электрических двигателей и бортового оборудования полезной нагрузки летательного аппарата. Система управления наземного блока преобразования энергии имеет клавиатуру управления и панель индикации для ввода начальных параметров в зависимости от характеристик используемого кабель-троса (длина линии, площадь сечения медной жилы, допустимая мощность нагрузки), а также контроля текущих показаний силы тока в кабель-тросе. Программное обеспечение системы управления содержит алгоритм выбора параметров для кабель-троса и расчет необходимых характеристик управления для автоматического регулирования выходного напряжения. Наземный блок преобразования энергии имеет встроенную защиту от перегрузки и короткого замыкания, а также защиту от перегрева. Выходное напряжение регулируется в пределах 0-500 В постоянного тока.
Кабель-трос выполнен в виде кабеля в оболочке из силиконовой резины, внутри которого уложены два многожильных медных провода с изоляцией, кевларовая нить и оптическое волокно. Выбор типа кабеля осуществлен с учетом предельно допустимой силы тока в режиме максимальной нагрузки, при которой не происходит нагрев оболочки кабеля выше предельной температуры эксплуатации. Кроме того, были учтены параметры внешнего диаметра кабеля и удельного веса на погонный метр в целях минимизации массы кабель-троса. Площадь сечения медной жилы составляет 1,0 мм2. Удельное сопротивление жилы - 0,018 Ом/м. Удельный вес на погонный метр составляет 59 г. Внешний диаметр составляет 6,6 мм. Номинальное напряжение - до 660 В. Температура эксплуатации кабеля в пределах от - 60°С до +180°С. Общий вес кабеля длиной 100 м составляет 5,9 кг. Кабель-трос уложен на катушку лебедки, которая имеет блок управления, выполненный на базе микропроцессора. Процесс намотки и роспуска кабель-троса в режимах подъема и посадки летательного аппарата осуществляется в автоматическом режиме.
На летательном аппарате установлен бортовой преобразователь, состоящий из трех параллельно соединенных изолированных модулей преобразования напряжения постоянного тока с постоянным коэффициентом преобразования 1:8. Входное напряжение модуля составляет 260…410 В. Мощность каждого модуля составляет 1,75 кВт при выходном напряжении 50 В постоянного тока. Модули преобразования напряжения имеют две теплоотводящие платы в виде алюминиевых ребристых радиаторов охлаждения, установленных сверху и снизу модулей. В качестве охлаждения радиаторов использованы малогабаритные вентиляторы с высокой производительностью воздушного потока, питание которых осуществляется напряжением 50 В постоянного тока от бортового преобразователя. Выходное напряжение бортового преобразователя составляет 50 В ±0,2% постоянного тока, максимальный ток - 100 А. Суммарная мощность бортового преобразователя составляет 5,25 кВт при КПД равном 98%. Компактное размещение узлов схемы позволило минимизировать габаритные размеры и массу бортового преобразователя. Габаритные размеры бортового преобразователя составляют 200×150×75 мм, вес - 1,9 кг.
Для экстренной посадки в случае аварийных условий функционирования на борту летательного аппарата имеется резервная аккумуляторная батарея. Вес резервной аккумуляторной батареи составляет 4,5 кг. Выход бортового модуля преобразования энергии и резервная аккумуляторная батарея подключены к блоку коммутации питания. Электроснабжение электрических двигателей силовой установки летательного аппарата и аппаратуры полезной нагрузки осуществляются через блок коммутации питания от бортового преобразователя. Переход на электроснабжение от резервной аккумуляторной батареи при аварийной ситуации происходит автоматически.
Беспилотный летательный аппарат типа квадрокоптер имеет четыре электрических двигателя и потребляет 3…4 кВт электроэнергии постоянного тока напряжением 50 В при максимальных режимах эксплуатации. Вес квадрокоптера составляет 10 кг. На борту квадрокоптера установлено оборудование полезной нагрузки (видеокамера и базовая станция сотовой связи четвертого поколения), которое потребляет мощность 1…2 кВт. Взлетный вес квадрокоптера составляет 28 кг, включая вес полезной нагрузки, резервной аккумуляторной батареи, бортового преобразователя и кабель-троса. Вес полезной нагрузки составляет 9 кг. Длительность функционирования определяется ресурсом используемых электрических двигателей. Максимальное время непрерывного функционирования в испытательных полетах составило 12 ч.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРОПИТАНИЯ ПРИВЯЗНОГО БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2023 |
|
RU2815590C1 |
| СПОСОБ ЭЛЕКТРОСНАБЖЕНИЯ ПРИВЯЗНОГО АЭРОСТАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2449927C2 |
| Устройство для энергоснабжения привязного беспилотного летательного аппарата | 2021 |
|
RU2793830C1 |
| СИСТЕМА ЭЛЕКТРОСНАБЖЕНИЯ ПРИВЯЗНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2022 |
|
RU2782805C1 |
| УСТРОЙСТВО ДЛЯ ЭНЕРГОСНАБЖЕНИЯ ПРИВЯЗНОГО БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2022 |
|
RU2782733C1 |
| Способ электропитания бортовой аппаратуры высотной привязной платформы, построенной беспилотным летательным аппаратом | 2024 |
|
RU2841215C1 |
| СПОСОБ И УСТРОЙСТВО ЭЛЕКТРОСНАБЖЕНИЯ ВОЗДУШНОГО ЛЕТАТЕЛЬНОГО АППАРАТА (ВАРИАНТЫ) | 2013 |
|
RU2554723C2 |
| СИСТЕМА ЭЛЕКТРОПИТАНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2520180C2 |
| УСТРОЙСТВО ЗАЩИТЫ АККУМУЛЯТОРНЫХ БАТАРЕЙ ОТ ГЛУБОКОГО РАЗРЯДА | 2014 |
|
RU2549349C1 |
| СПОСОБ ЭЛЕКТРИЧЕСКИХ ПРОВЕРОК КОСМИЧЕСКОГО АППАРАТА | 2016 |
|
RU2647808C2 |
Устройство для электропитания привязного летательного аппарата содержит источник электроэнергии и наземный преобразователь, размещенные на наземном объекте, размещенные на борту летательного аппарата бортовой преобразователь и резервную аккумуляторную батарею, кабель-трос. Наземный преобразователь содержит блок преобразования, силовой регулирующий модуль, датчик тока, контроллер, широтно-импульсный модулятор, панель управления и индикации. Бортовой преобразователь содержит изолированный модуль преобразования и электронный коммутатор питания. Обеспечивается повышение КПД передачи энергии с земли на борт, снижение габаритных размеров и массы бортового преобразователя, увеличение уровня безопасности и надежности. 1 ил.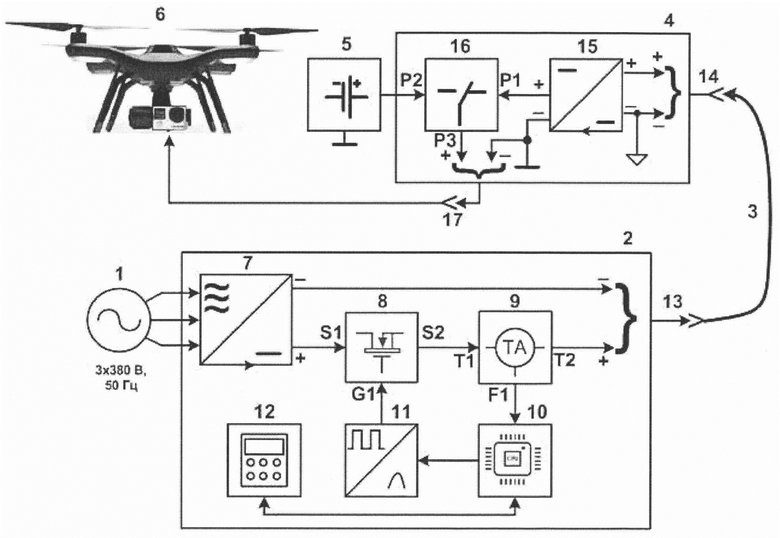
Устройство для электропитания привязного летательного аппарата, содержащее размещенные на наземном объекте источник электроэнергии, наземный преобразователь, кабель-трос с токопроводящими жилами, предназначенный для передачи электроэнергии от наземного преобразователя на упомянутый летательный аппарат, а также размещенные на летательном аппарате бортовой преобразователь и резервную аккумуляторную батарею для электропитания бортового оборудования летательного аппарата; силовой вход наземного преобразователя подключен к источнику электроэнергии, а к силовым выходным клеммам «плюс» и «минус» наземного преобразователя подключены соответственно входные клеммы «плюс» и «минус» кабель-троса, к выходным клеммам которого подключен силовой вход бортового преобразователя, к силовым выходам которого подключены устройства бортового электрооборудования летательного аппарата, отличающееся тем, что в наземный преобразователь, содержащий блок преобразования, введены силовой регулирующий модуль, имеющий два силовых вывода и один управляющий вывод, а также система управления, содержащая датчик тока, контроллер, широтно-импульсный модулятор и панель управления и индикации; силовой вход силового регулирующего модуля подключен к выходной клемме «плюс» блока преобразования, а силовой выход подключен к первому силовому выводу датчика тока, второй силовой вывод которого подключен к выходной клемме «плюс» наземного преобразователя; выход датчика тока подключен к входу контроллера, который имеет интерфейс ввода/вывода, подключенный к панели управления и индикации, и выход, подключенный к входу широтно-импульсного модулятора, выход которого подключен к управляющему входу силового регулирующего модуля; а в бортовой преобразователь введены изолированный модуль преобразования и электронный коммутатор питания, имеющий три силовых вывода; входные клеммы «плюс» и «минус» изолированного модуля преобразования подключены соответственно к клеммам «плюс» и «минус» кабель-троса, а выходная клемма «плюс» подключена к первому силовому выводу электронного коммутатора, второй силовой вывод которого подключен к клемме «плюс» резервной аккумуляторной батареи, а третий силовой вывод подключен к клемме «плюс» бортового электрооборудования летательного аппарата; выходная клемма «минус» изолированного модуля преобразования и клеммы «минус» резервной аккумуляторной батареи и бортового электрооборудования летательного аппарата соединены между собой.
| СПОСОБ УДАЛЕННОГО ПРОВОДНОГО ЭЛЕКТРОПИТАНИЯ ОБЪЕКТОВ | 2014 |
|
RU2572822C1 |
| Машина для пересадки растений | 1929 |
|
SU21564A1 |
| CN 208063063 U, 06.11.2018 | |||
| СОСТАВ ДЛЯ УДАЛЕНИЯ ПРОДУКТОВ АТМОСФЕРНОЙ КОРРОЗИИ С ПОВЕРХНОСТИ КОРРОЗИОННОСТОЙКИХ СТАЛЕЙ | 2014 |
|
RU2560486C1 |
| WO 2014089329 A2, 12.06.2014. | |||

