ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к системе для определения относительной ориентации устройства к пользователю.
УРОВЕНЬ ТЕХНИКИ
В последние годы наблюдается увеличение спроса в отношении «интеллектуальных» приборов личной гигиены, которые выполнены с возможностью выполнения функциональных возможностей посредством обнаружения некоторого количества физических параметров, ассоциированных с пользователем. Например, использование приборов личной гигиены, таких как зубные щетки, машинки для стрижки волос, машинки для подравнивания бороды, фены, и т.д. может быть улучшено посредством изменения функции прибора в зависимости от относительной ориентации и/или положения прибора к пользователю.
Было описано несколько способов для определения ориентации прибора относительно пользователя, в частности части тела пользователя (например, головы). Например, в некоторых обычных механизмах, интенсивность и/или температура потока воздуха от фена, может быть отрегулирована в соответствии с расстоянием и/или углом потока воздуха относительно головы пользователя.
Существует некоторое количество обычных способов для определения относительной ориентации и/или положения устройства к пользователю, и модифицирования функциональной возможности устройства некоторым образом в зависимости от определенной ориентации и/или положения. Например, некоторые обычные приборы личной гигиены содержат датчик электромагнитного поля, который используется совместно с устройством отслеживания головы пользователя, которое содержит другой датчик электромагнитного поля. В таких системах, данные, которые захватываются посредством датчиков электромагнитного поля как от прибора личной гигиены, так и устройства отслеживания головы пользователя, передаются к встроенной компьютерной системе так, что может быть осуществлен мониторинг положения и поворота прибора личной гигиены.
В обычных системах, использование электромагнитной системы, чтобы определять относительную ориентацию прибора и пользователя, требует большого количества регистрирующего аппаратного обеспечения и мощностей обработки.
Документ WO 2013/163999 раскрывает систему подравнивания волос, которая выполнена с возможностью обнаружения положения устройства подравнивания волос по отношению к голове клиента.
Документ US 2014/0200734 раскрывает устройство позиционирования, которое может определять положение и/или ориентацию устройства стрижки волос.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Цель изобретения состоит в предоставлении системы, которая выполнена с возможностью измерения ориентации первого устройства относительно второго устройства, причем пользователь носит второе устройство, и методики для измерения ориентации первого устройства относительно второго устройства, которая, по существу, смягчает или преодолевает упомянутые выше проблемы.
В соответствии с аспектом настоящего изобретения, предоставляется система для определения ориентации первого устройства относительно пользователя как изложено в п.1 формулы изобретения.
Следовательно, такая система может определять ориентацию первого устройства относительно пользователя посредством сравнения ориентации первого устройства относительно Земли с ориентацией второго устройства, которое носит пользователь, относительно Земли. Это обеспечивает удобный способ определения ориентации первого устройства относительно пользователя, который является очень эффективным, исходя из требуемой мощности обработки.
Первый блок измерения ориентации и второй блок измерения ориентации содержат акселерометр. Размещая акселерометр в первом устройстве, известна относительная ориентация прибора к окружающей среде. Размещая акселерометр во втором устройстве в фиксированном положении на человеке на релевантной части тела, известна относительная ориентация человека к окружающей среде. Посредством сравнения (посредством геометрического вычитания) этих ориентаций может быть определена ориентация прибора относительно человека или релевантной части тела человека.
Посредством объединения ориентации с положением, которое определяется посредством другого способа (такого как датчик электромагнитного поля или подсистемы основанной на лазерном датчике расстояния), определяется местоположение первого устройства (например, прибора) относительно человека.
В некоторых вариантах осуществления второе устройство выполнено с возможностью ношения пользователем на части тела.
В некоторых вариантах осуществления первое устройство выполнено с возможностью регулирования функциональной возможности первого устройства на основании ориентации первого устройства относительно пользователя.
В некоторых вариантах осуществления первое устройство дополнительно содержит первый блок связи, и второе устройство дополнительно содержит второй блок связи, при этом второй блок связи выполнен с возможностью передачи измеренной ориентации второго устройства относительно Земли к первому блоку связи.
В некоторых вариантах осуществления первый блок измерения ориентации содержит по меньшей мере одно из следующего: гироскоп, и цифровой инклинометр, а второй блок измерения ориентации содержит гироскоп, компас, средство определения севера, и цифровой инклинометр.
В некоторых вариантах осуществления блок обработки располагается по меньшей мере в одном из следующего: первом устройстве, втором устройстве, и третьем устройстве.
Посредством определения ориентации первого устройства относительно пользователя посредством сравнения ориентации первого устройства относительно Земли с ориентацией второго устройства, которое носит пользователь, относительно Земли, и объединения этого с измерением относительного положения первого устройства ко второму устройству (например, используя датчик электромагнитного поля или лазерный датчик расстояния), местоположение первого устройства относительно человека определяется очень эффективным образом. Например, это использует значительно меньше мощности обработки, чем использование основанной на местоположении системы для определения как положения, так и ориентации.
В некоторых вариантах осуществления первый блок измерения положения содержит датчик электромагнитного поля или лазерный датчик расстояния.
В некоторых вариантах осуществления первое устройство дополнительно выполнено с возможностью регулирования функциональной возможности первого устройства на основании относительной ориентации первого устройства ко второму устройству и относительного положения первого устройства ко второму устройству.
В некоторых вариантах осуществления первое устройство является личным прибором, включающим в себя любое из следующего: электрической бритвы, машинки для стрижки волос, машинки для подравнивания бороды, электрической зубной щетки, фена, устройства ухода за кожей, очистительного прибора, и косметического прибора.
В соответствии с аспектом изобретения, предоставляется устройство, содержащее: первый блок измерения ориентации, выполненный с возможностью измерения ориентации первого устройства относительно Земли; первый блок связи, выполненный с возможностью приема ориентации второго устройства относительно Земли, причем пользователь носит второе устройство; и блок обработки, выполненный с возможностью вычисления ориентации первого устройства относительно пользователя посредством сравнения измеренной ориентации перового устройства с принятой ориентацией второго устройства.
В некоторых вариантах осуществления устройство дополнительно выполнено с возможностью регулирования своей функциональной возможности на основании относительной ориентации первого устройства к пользователю.
Эти и прочие аспекты изобретения будут очевидны из и объясняются со ссылкой на варианты осуществления, описываемые далее.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Варианты осуществления изобретения теперь будут описаны, только в качестве примера, со ссылкой на сопроводительные чертежи, на которых:
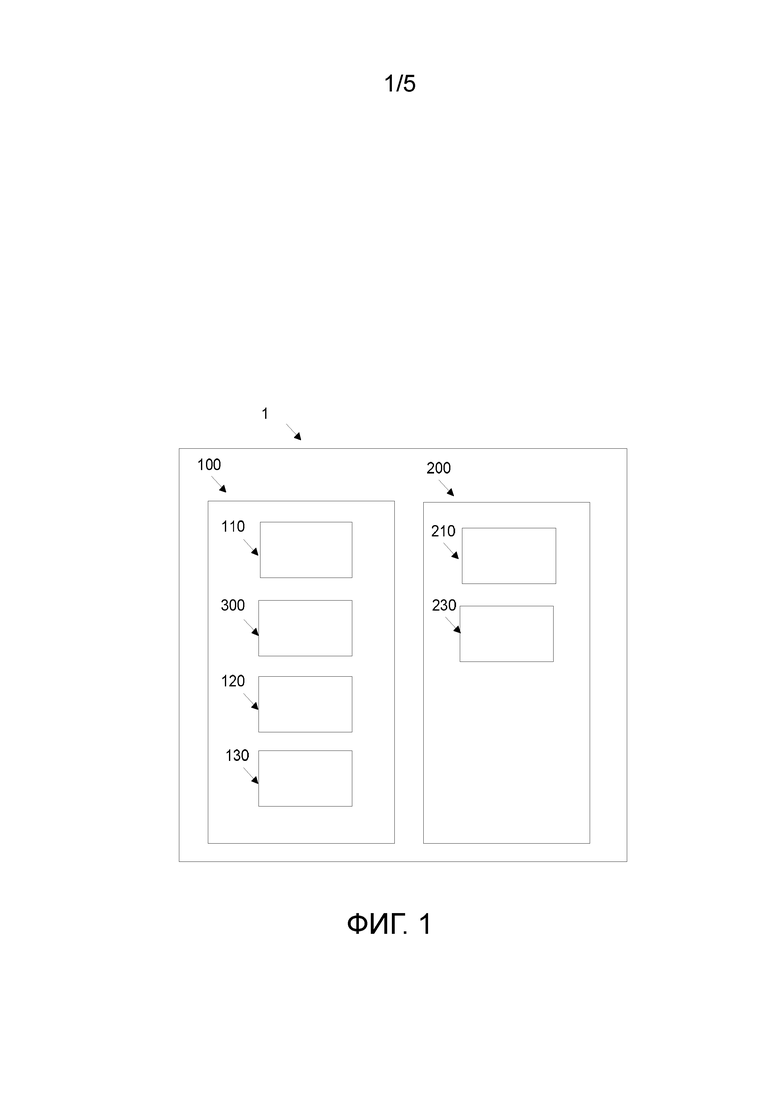
Фиг. 1 является структурной схемой системы в соответствии с первым вариантом осуществления настоящего изобретения;
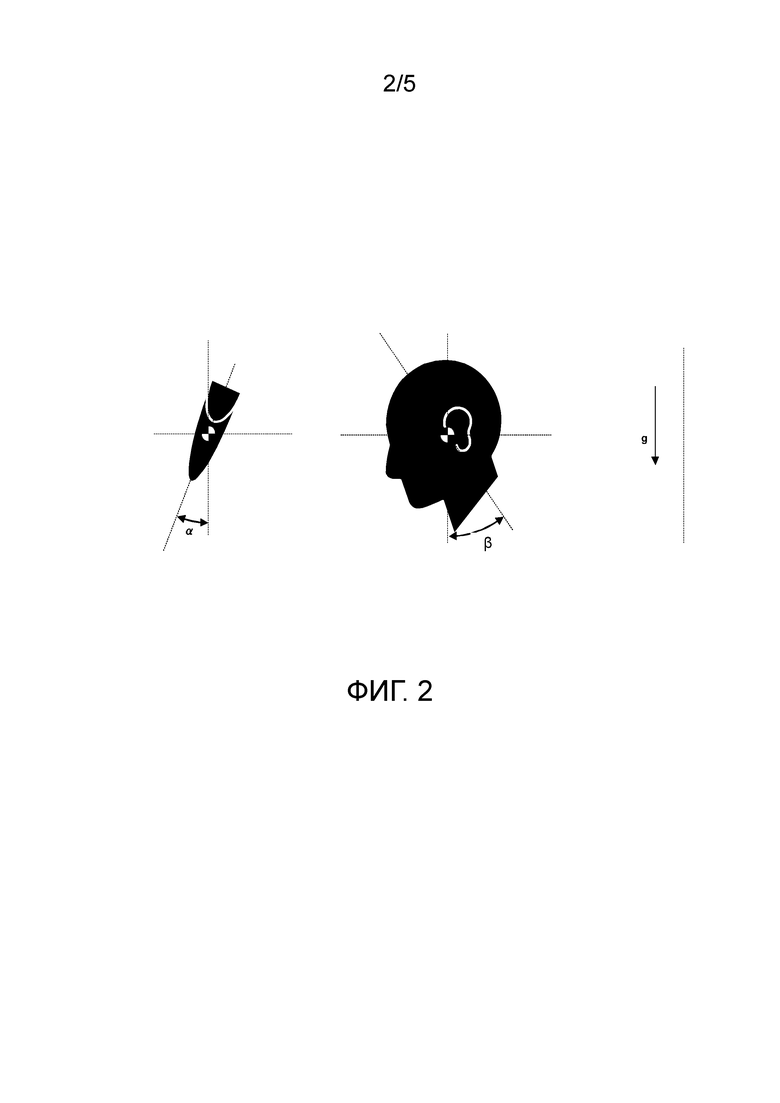
Фиг. 2 является схемой, иллюстрирующей ориентацию первого устройства относительно Земли и ориентацию второго устройства относительно Земли на виде сбоку, в соответствии с первым вариантом осуществления настоящего изобретения;
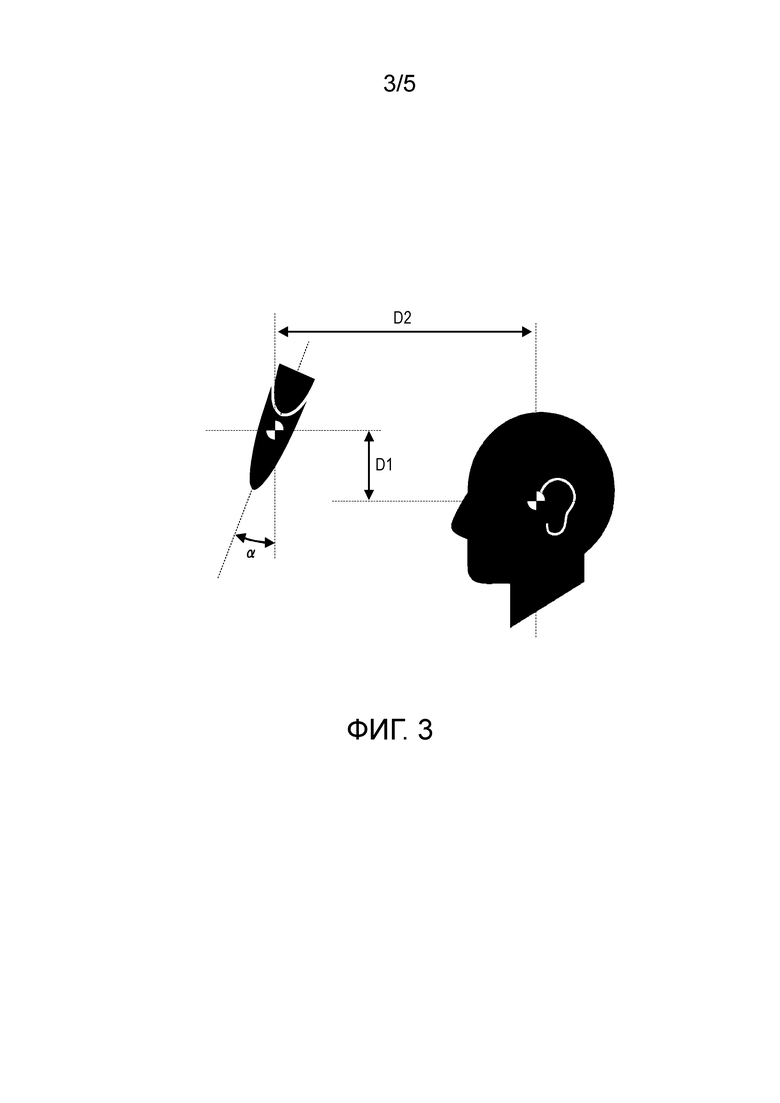
Фиг. 3 является схемой, иллюстрирующей относительную ориентацию первого устройства 100 к голове пользователя на виде сбоку, в соответствии с первым вариантом осуществления настоящего изобретения;
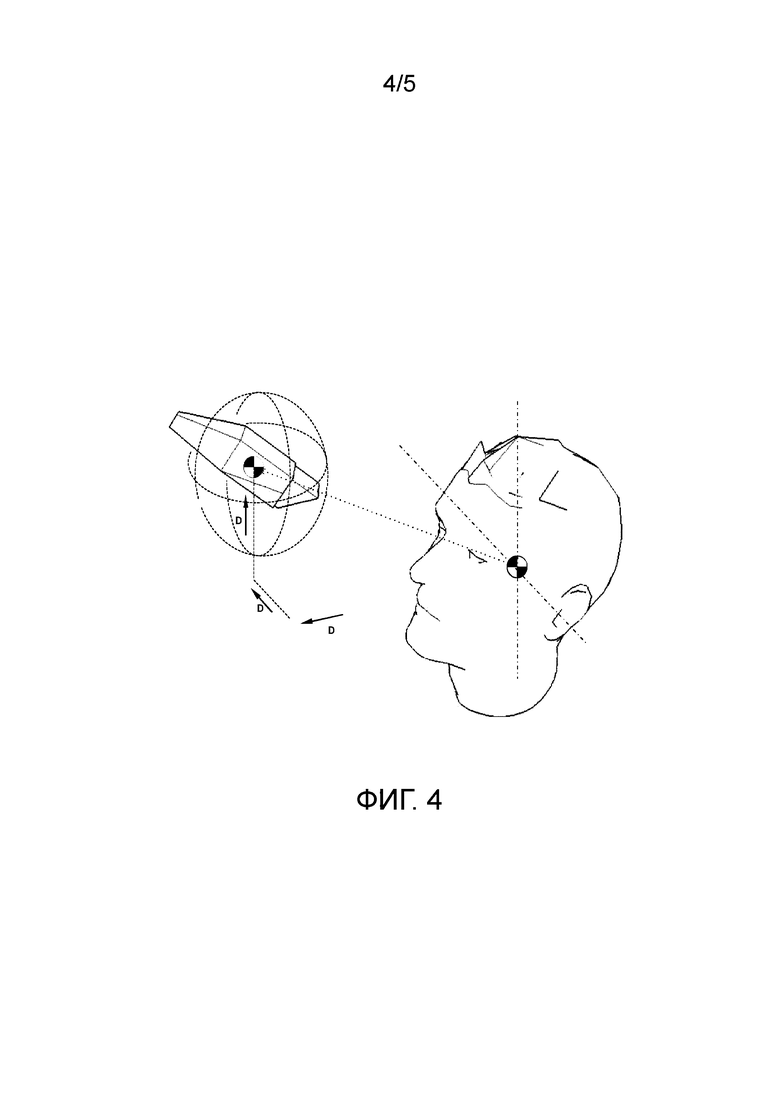
Фиг. 4 является схемой, иллюстрирующей относительную ориентацию первого устройства 100 к голове пользователя на виде сбоку, в соответствии с первым вариантом осуществления настоящего изобретения;
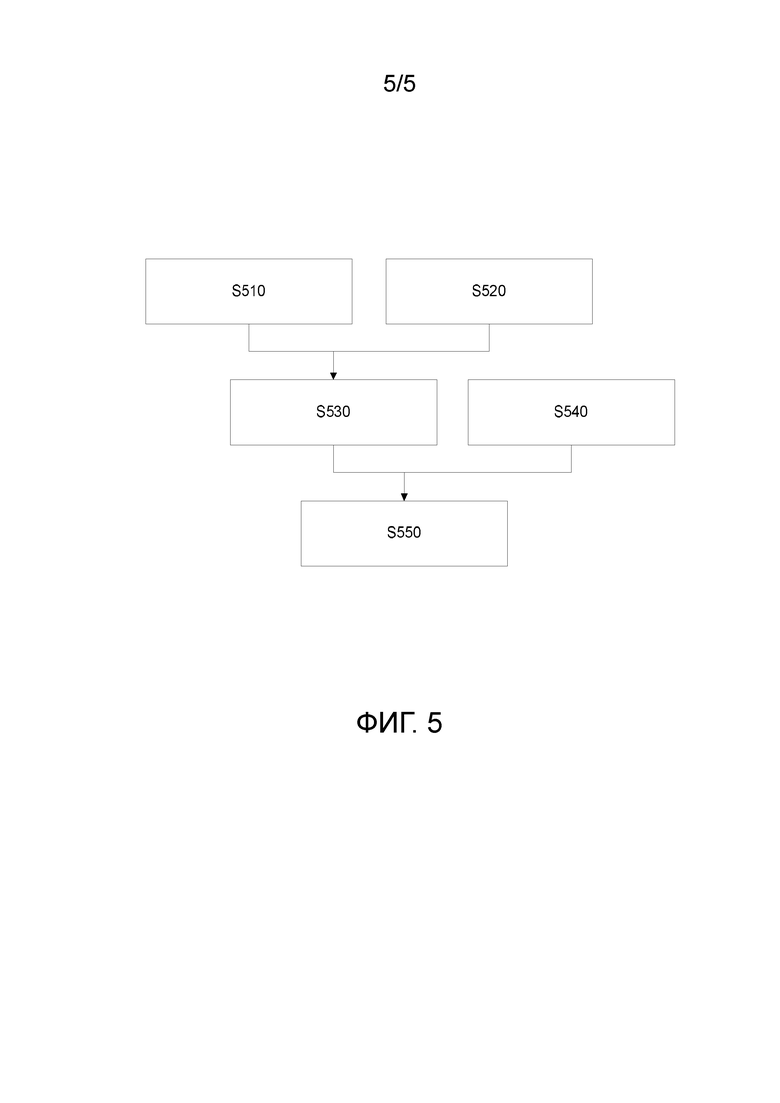
Фиг. 5 является блок-схемой, иллюстрирующей способ для измерения относительной ориентации первого устройства ко второму устройству, в соответствии с первым вариантом осуществления настоящего изобретения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Фиг. 1 является структурной схемой системы в соответствии с вариантом осуществления настоящего изобретения.
Как иллюстрируется на Фиг. 1, предоставляется система 1, содержащая первое устройство 100 и второе устройство 200. Система 1 выполнена с возможностью определения относительной ориентации первого устройства 100 ко второму устройству 200. В данном варианте осуществления, второе устройство 200 выполнено с возможностью ношения на части тела пользователя. В результате, в данном варианте осуществления можно предположить, что ориентация второго устройства 200 к пользователю является фиксированной. Следовательно, относительная ориентация первого устройства 100 к пользователю может быть определена на основе относительной ориентации первого устройства 100 ко второму устройству 200.
В частности, в данном варианте осуществления, первое устройство 100 является машинкой для стрижки волос, а второе устройство 200 является устройством отслеживания головы в ухе, которое пользователь может носить в его/ее ухе в фиксированном положении.
Первое устройство 100 содержит первый блок 110 измерения ориентации, первый блок 120 измерения положения, первый блок 130 связи, и блок 300 обработки.
Следует иметь в виду, что первое устройство 100 будет иметь некоторое количество компонентов, которые относятся к функциональной возможности стрижки/подравнивания волос первого устройства 100, которые не показаны на Фиг. 1 для удобства. Как описывается ниже, в данном варианте осуществления, регулирование функциональной возможности стрижки/подравнивания волос первого устройства может осуществляться на основании относительной ориентации и относительного положения первого и второго устройств.
В данном варианте осуществления, первый блок 110 измерения ориентации является акселерометром, выполненным с возможностью измерения ускорения первого устройства 100 и перевода измеренных данных ускорения в ориентацию первого устройства 100 относительно Земли. Следовательно, первый блок 110 измерения ориентации выполнен с возможностью измерения ориентации первого устройства относительно Земли.
Ориентация первого устройства 100 относительно Земли, измеренная посредством первого блока 110 измерения ориентации, сообщается блоку 300 обработки.
Первый блок 120 измерения положения выполнен с возможностью измерения относительного положения первого устройства 100 ко второму устройству 200. В данном варианте осуществления, первый блок 120 измерения положения является датчиком электромагнитного поля, например, типа, описанного в документе WO2013163999.
Измеренное относительное положение первого устройства 100 ко второму устройству 200 сообщается блоку 300 обработки.
Первый блок 130 связи выполнен с возможностью приема измеренной ориентации второго устройства 200 относительно Земли от второго блока 200 связи второго устройства 200. Первый блок 130 связи в данном варианте осуществления является беспроводным интерфейсом Bluetooth на связи со вторым блоком 230 связи второго устройства 200, который также является беспроводным интерфейсом Bluetooth.
Второе устройство 200 содержит второй блок 210 измерения ориентации и второй блок 230 связи.
В данном варианте осуществления, второе устройство 200 является устройством отслеживания головы в ухе, которое пользователь должен носить в фиксированном положении в ухе (т.е., с фиксированной ориентацией), когда система используется. Вследствие этого, ориентация второго устройства 200 относительно Земли указывает ориентацию головы пользователя.
В данном варианте осуществления, второй блок 210 измерения ориентации является акселерометром, выполненным с возможностью измерения ускорения второго устройства 200 и перевода измеренных данных ускорения в ориентацию второго устройства 200 относительно Земли. Следовательно, второй блок 210 измерения ориентации выполнен с возможностью измерения ориентации второго устройства относительно Земли.
В данном варианте осуществления, измеренная ориентация второго устройства 200 относительно Земли передается посредством второго блока 230 связи к первому блоку 130 связи.
Блок 300 обработки выполнен с возможностью регулирования функциональной возможности стрижки/подравнивания волос первого устройства 100 на основании относительной ориентации и относительного положения первого устройства 100 ко второму устройству 200.
В данном варианте осуществления, устройство 300 обработки принимает ориентацию первого устройства относительно Земли, измеренную посредством первого блока 110 измерения ориентации, и ориентацию второго устройства 200 относительно Земли, принятую посредством первого блока 130 связи. Блок 300 обработки также принимает относительное положение первого устройства 100 ко второму устройству 200, измеренное посредством первого блока 120 измерения положения.
Блок 300 обработки вычисляет относительную ориентацию первого устройства 100 ко второму устройству 200 посредством сравнения измеренной ориентации первого устройства 100 относительно Земли с измеренной ориентацией второго устройства 200 относительно Земли.
В частности, в данном варианте осуществления, блок 300 обработки выполняет геометрическое вычитание над измеренной ориентацией первого устройства 100 относительно Земли и измеренной ориентацией второго устройства с тем, чтобы получить относительную ориентацию первого устройства 100 ко второму устройству 200.
В данном варианте осуществления, блок 300 обработки объединяет вычисленную относительную ориентацию первого и второго устройства 100 с относительным положением первого устройства по отношению ко второму устройству, измеренным посредством первого блока 120 измерения положения. В данном варианте осуществления, блок 300 обработки выполнен с возможностью использования данной информации об относительной ориентации и об относительном положении, чтобы регулировать функциональную возможность стрижки/подравнивания волос первого устройства 100. Например, мощность работы машинки для стрижки волос может быть уменьшена или увеличена, когда определяется, что относительная ориентация первого устройства 100 ко второму устройству 200 находится в пределах предварительно определенного диапазона.
Фиг. 2 является схемой, иллюстрирующей ориентацию первого устройства 100 относительно Земли и ориентацию второго устройства 200 относительно Земли на виде сбоку, в соответствии с первым вариантом осуществления настоящего изобретения.
Первое устройство 100 (например, машинка для стрижки волос) находится в ориентации, составляющей угол α относительно вертикали, и устройство 200 отслеживания головы в ухе находится в ориентации, составляющей угол β относительно вертикали. Угол β также является указывающим ориентацию головы пользователя относительно плоскости Земли, поскольку устройство отслеживания головы в ухе является фиксированным в положении в ухе пользователя. Гравитационное ускорение обозначается посредством g на Фиг. 2. Следует иметь в виду, что несмотря на то, что ориентации и углы показаны по отношению к одной плоскости со ссылкой на Фиг. 2, это лишь для простоты иллюстрации.
В данном варианте осуществления, первый блок 110 измерения ориентации выполнен с возможностью измерения ориентации первого устройства 100 относительно Земли в качестве набора углов. Это затем сообщается от первого блока 110 измерения ориентации к блоку 300 обработки.
Устройство 200 отслеживания головы в ухе содержит второй блок 210 измерения ориентации, который выполнен с возможностью измерения ориентации второго устройства 200. В данном варианте осуществления, второй блок 210 измерения ориентации является акселерометром и выполнен с возможностью измерения ориентации второго устройства 200 относительно Земли в качестве набора углов. Это затем сообщается от второго блока 210 измерения ориентации ко второму блоку 230 связи. Второй блок 230 связи затем передает набор углов к первому блоку 130 связи первого устройства. Затем, первый блок 130 связи сообщает это блоку 300 обработки.
Блок 300 обработки затем выполнен с возможностью выполнения геометрического вычитания первого набора углов, указывающих ориентацию первого устройства 100 относительно Земли, и второго набора углов, указывающего ориентацию второго устройства 200 относительно Земли. Например, рассматривая ориентацию относительно вертикали, блок 300 обработки вычитает угол α (ассоциированный с первым устройством 100) и угол β (ассоциированный со вторым устройством 200), чтобы создать угол γ, который является относительной вертикальной ориентацией первых устройств.
Для того, чтобы ориентация машинки 100 для стрижки волос и устройства 200 отслеживания головы в ухе измерялась точно, изменение движения (ускорение) первого устройства 100 и второго устройства является предпочтительно низким относительно гравитационного ускорения (g). При работе, результирующее среднее ускорение акселерометра 110 и акселерометра 210, которые содержаться в машинке 100 для стрижки волос и устройстве 200 отслеживания головы в ухе в течение более длительного периода времени будет указывать направление силы тяжести. Дополнительно к данному способу, от блока измерения положения известно изменение во времени положения. Следовательно, ускорения из-за данного изменения положения могут быть определены посредством интегрирования во времени. На практике вычитание ускорений из-за изменений положения из измерения акселерометра дает мгновенное, за короткий период времени измерение ориентации относительно Земли. За более длительный период (приблизительно > 20 секунд) результирующее усреднение гарантирует корректность за более длительный период и предотвращает дрейф во времени.
При практическом использовании машинки 100 для стрижки волос, отсутствует продолжительное ускорение в одном направлении в течение более длительного периода (например, более 5 секунд). Это позволяет использовать усредненное данных акселерометров, которые содержаться в машинке 100 для стрижке волос и/или устройстве 200 отслеживания головы в ухе, чтобы измерять ориентации для относительно спокойной работы (например, движений < 4Гц).
Фиг. 3 показывает другой вид сбоку первого устройства 100 и второго устройства первого варианта осуществления. Первое устройство 100 находится в относительной ориентацией, которая составляет угол γ с головой пользователя по отношению к вертикали. Со ссылкой на Фиг. 2, угол γ получается посредством геометрического вычитания угла α (ассоциированного с первым устройством 100 относительно плоскости Земли) и угла β (ассоциированного со вторым устройством 200).
Первое расстояние между вертикальной осью машинки 100 для стрижки волос и вертикальной осью устройства 200 отслеживания головы обозначено как D1 на Фиг. 3. Второе расстояние между горизонтальной осью машинки 100 для стрижки волос и горизонтальной осью устройства 200 отслеживания головы в ухе обозначено как D2 на Фиг. 3. Они соответствуют относительному расстоянию первого устройства 100 ко второму устройству 200, как описано выше.
На практике, эти D1 и D2 (в плоскости) или D1, D2 и D3 (в пространстве) измеряются используя измерение расстояние до первого устройства от второго устройства, имея в виду, что второе устройство имеет размер (в частности при варианте осуществления в ухе), который позволяет вывести положение из дельт между значениями по крайним точкам второго устройства.
Блок 300 обработки выполнен с возможностью использования расстояния D1 и расстояния D2 для того, чтобы определять относительное местоположение первого устройства 100 ко второму устройству 200. В данном варианте осуществления, это используется с информацией об относительной ориентации, чтобы выполнять регулировки, исходя из функциональной возможности стрижки/подравнивания волос.
Фиг. 4 показывает схематическое изображение первого устройства 100 и второго устройства 200. Система измерения положения дает положение первого устройства относительно второго устройства (т.е., так же как пользователя) -расстояния D на Фиг. 4 (которые могут быть выражены в качестве декартовых или в качестве полярных координат).
Из этого следует иметь в виду, что возможно, но тяжелее и объемнее, для системы позиционирования определять ориентацию первого устройства относительно второго устройства (указанную посредством трех поворотов на Фиг. 4). Следовательно, варианты осуществления изобретения предоставляют эффективный способ определения ориентации.
Фиг. 5 является блок-схемой, иллюстрирующей способ для измерения относительной ориентации первого устройства 100 и второго устройства 200 в соответствии с первым вариантом осуществления настоящего изобретения.
На этапе S510 блок-схемы, измеряется ориентация первого устройства 100. Как объяснено выше, ориентация первого устройства 100 относительно Земли измеряется посредством первого блока 110 измерения ориентации в первом устройстве 100. Измеренная ориентация первого устройства 100 к Земле затем сообщается блоку 300 обработки, который располагается в первом устройстве 100 в данном варианте осуществления.
На этапе S520, ориентация второго устройства 200 измеряется посредством второго блока 210 измерения ориентации второго устройства 200. Данный этап может выполняться в то же самое время, что и этап S510. Ориентация второго устройства 200 относительно земли измеряется посредством второго блока 210 измерения ориентации во втором устройстве 200. Измеренная ориентация второго устройства 200 к Земле затем передается через второй блок 230 связи к первому блоку 130 связи и затем впоследствии сообщается блоку 300 обработки посредством первого блока 130 связи.
На этапе S530, относительная ориентация первого устройства 100 ко второму устройству 200 вычисляется посредством блока 300 обработки. На данном этапе, блок 300 обработки сравнивает ориентацию первого устройства 100 относительно Земли и ориентацию второго устройства 200 относительно Земли и выполняет геометрическое вычитание для того, чтобы сгенерировать относительную ориентацию первого устройства 100 ко второму устройству 200.
На этапе S540 относительное положение первого устройства 100 ко второму устройству 200 измеряется посредством первого блока 120 измерения положения. Данный этап может происходить в любое время в течение этапов с S510 по S530. Относительное положение первого устройства 100 ко второму устройству 200 затем сообщается блоку 300 обработки.
На этапе S550 относительное местоположение первого устройства 100 ко второму устройству 200 вычисляется посредством блока 300 обработки, после вычисления относительной ориентации первого устройства 100 ко второму устройству 200 и приема относительного положения первого устройства 100 ко второму устройству 200.
Следует иметь в виду, что в альтернативных вариантах осуществления, этапы способа могут быть выполнены в последовательности отличной от той, что описана выше, в частности, в отношении измерений ориентации и положения.
На основании вышеприведенного, система первого варианта осуществления может определять относительную ориентацию и относительное положение первого устройства и второго устройства. При условии, что второе устройство находится в фиксированном положении относительно пользователя, могут быть определены относительная ориентация и положение первого устройства и пользователя. Это может быть использовано, чтобы менять функциональную возможность первого устройства.
В частности, относительная ориентация первого устройства и второго устройства определяется на основании сравнения ориентаций первого и второго устройств относительно Земли, вместо способом непосредственного определения относительных ориентаций первого и второго устройств (например, посредством использования механизма электромагнитного датчика).
В обычных системах, использование, например, электромагнитной системы, чтобы определять как относительное местоположение прибора к человеку, так и чтобы определять относительную ориентацию в дополнение к положению, требует большого количества регистрирующего аппаратного обеспечения и, в частности, мощностей обработки.
Тем не менее, посредством использования датчиков ориентации (например, акселерометров) в первом устройстве и во втором устройстве, относительная ориентация может быть определена посредством сравнения, например, посредством геометрического вычитания. Следовательно, варианты осуществления изобретения могут предоставлять механизм для определения относительной ориентации первого и второго устройств (и в целом относительной ориентации первого устройства и пользователя, который носит второе устройство в фиксированной ориентации), который требует по существу меньшей мощности обработки, чем обычные решения.
Варианты осуществления настоящего изобретения могут быть использованы для дополнения обычной бесконтактной технологии измерения отдельным набором локализованных датчиков ориентации разных технологических принципов к датчикам положения (расстояния). Используя данные ориентации этих датчиков ориентации и сообщая их единому блоку обработки можно определять относительную ориентацию. Это может быть использовано для дополнения и выполнения системы определения относительного местоположения.
В некоторых вариантах осуществления помещая два акселерометра на известном расстоянии друг от друга в первом устройстве (или во втором устройстве) возможно улучшенное считывание ориентации относительно окружающей среды прибора.
В описанном выше варианте осуществления, первое устройство 100 определяет относительную ориентацию и относительное положение первого и второго устройств. Тем не менее, в других вариантах осуществления, система может быть выполнена с возможностью определения только относительной ориентации первого устройства и пользователя посредством сравнения ориентаций первого и второго устройств относительно Земли. В таких вариантах осуществления, функциональная возможность первого устройства 100 может быть отрегулирована на основании только относительных ориентаций первого устройства и пользователя.
В качестве альтернативы, в некоторых таких вариантах осуществления, первое устройство 100 может содержать датчик близости. В таком варианте осуществления, первое устройство 100 может определять относительную ориентацию и относительное положение первого и второго устройств и использовать это с данными от датчика близости, чтобы регулировать функциональную возможность первого устройства 100. Например, если первое устройство 100 является феном, тогда датчик близости может быть использован, чтобы обнаруживать насколько отдалено первое устройство 100 от объекта, который при использовании можно предположить головой пользователя. Следовательно, функциональная возможность фена может быть отрегулирована на основании относительных ориентаций фена и головы пользователя и расстояния отдаления от головы пользователя.
В некоторых вариантах осуществления относительное положение первого устройства 100 и второго устройства 200 могут быть измерены посредством отдельного блока или отдельного устройства (например, третьего устройства в системе), которое может быть выполнено с возможностью передачи к блоку 300 обработки измеренного относительного положения первого устройства 100 ко второму устройству 200 с тем, чтобы блок 300 обработки мог вычислять относительное местоположение первого устройства 100 ко второму устройству 200 посредством объединения измеренного относительного положения и вычисленной относительной ориентации.
Кроме того, В некоторых вариантах осуществления относительное положение первого устройства 100 и второго устройства 200 может быть измерено посредством блока, включенного во второе устройство 200. В таких вариантах осуществления, относительное положение первого устройства 100 ко второму устройству 200 может быть передано к блоку 300 обработки с тем, чтобы вычислять относительное местоположение первого устройства 100 ко второму устройству 200.
Несмотря на то, что блок 300 обработки показан в первом устройстве 100 на Фиг. 1, варианты осуществления изобретения не ограничиваются этим. Блок 300 обработки может располагаться во втором устройстве 200 или в третьем устройстве (не показано на чертежах) в системе, вместо внутри первого устройства 100. Если блок 300 обработки располагается вне первого устройства 100, он может передавать информацию управления первому устройству 100.
В вышеупомянутых вариантах осуществления, первый блок 110 измерения ориентации содержит акселерометр. Акселерометр дает уклон. В некоторых вариантах осуществления акселерометр может быть дополнен одним или более дополнительными датчиками (например, компасом), чтобы давать другой угол относительно Земли. Уклон относительно Земли уже является одним углом, который может быть использован, чтобы модифицировать поведение устройства. Зная также угол в горизонтальной плоскости (средство определения севера или магнитный компас) от блоков измерения ориентации известна полная ориентация относительно Земли.
В некоторых вариантах осуществления первый блок 110 измерения ориентации может содержать гироскоп, цифровой инклинометр, или подобное, вместо акселерометра. В некоторых вариантах осуществления первый блок 110 измерения ориентации может содержать по меньшей мере один датчик, пригодный для измерения ориентации первого устройства 100 относительно Земли.
В некоторых вариантах осуществления первый блок 120 измерения положения может содержать лазерный датчик расстояния или ультразвуковой датчик или подобное.
В некоторых вариантах осуществления первый блок 130 связи и/или второй блок 230 связи могут быть по меньшей мере одним из следующего: инфракрасным интерфейсом, интерфейсом Wi-Fi, интерфейсом ZigBee, или подобным, вместо интерфейса Bluetooth.
В вариантах осуществления изобретения, первое устройство 100 может быть одним из следующего: электрической бритвой, машинкой для подравнивания бороды, электрической зубной щеткой, феном, косметическим прибором, или любыми другими переносными устройствами, которые должны быть использованы совместно со вторым устройством 200. Например, когда первое устройство 100 воплощается в качестве фена, чтобы предоставлять горячий поток воздуха волосам пользователя, то температура и/или интенсивность потока воздуха, предоставляемого посредством фена, могут быть отрегулированы на основании относительной ориентации фена ко второму устройству 200. Если обнаруживается, что фен имеет ориентацию, при которой он указывает непосредственно на голову пользователя, температура потока воздуха фена может быть в ответ уменьшена.
В некоторых вариантах осуществления второе устройство 200 может содержать два или более компонента, каждый из которых носит пользователь. В таких вариантах осуществления, второе устройство 200 может содержать несколько датчиков ориентации (например, акселерометр) в разных местоположениях.
Второе устройство 200 в некоторых вариантах осуществления может быть воплощено в качестве устройства отслеживания ориентации, содержащегося в клипсе на ухо, ободке, ожерелье, браслете или подобном, которое может быть пригодным для фиксации на некоторой части тела пользователя таким образом, что ориентация второго устройства указывает ориентацию части тела пользователя. Второе устройство может быть любым устройством, которое носит пользователь (или прикрепленное или скрепленное с пользователем). В некоторых вариантах осуществления второе устройство может удерживаться пользователем, при условии, что пользователь удерживает второе устройство неподвижно относительно своего тела (например, неподвижно по отношению к релевантной части тела).
В качестве альтернативы, В некоторых вариантах осуществления может быть так, что пользователь носит первое устройство, а второе устройство является таким, которое свободно перемещается (и, например, функциональная возможность которого регулируется на основании ориентации).
Следует иметь в виду, что понятие «содержащий» не исключает других элементов или этапов и что формы единственного числа не исключают множественное. Один процессор может выполнять функции нескольких элементов, перечисленных в формуле изобретения. Тот лишь факт, что некоторые меры перечислены во взаимно разных зависимых пунктах формулы изобретения не указывает на то, что сочетание этих мер не может быть использовано для получения преимущества. Любые ссылочные обозначения в формуле изобретения не должны толковаться как ограничивающие объем формулы изобретения.
Несмотря на то, что формула изобретения была сформулирована в данной заявке с использованием конкретного сочетания признаков, следует понимать, что объем раскрытия настоящего изобретения также включает в себя любые новые признаки или любые новые сочетания признаков, раскрываемые в данном документе либо явно, либо неявно, либо в любом их обобщении, не смотря на то, относятся они или нет тому же изобретению, что заявлено в настоящее время в любом пункте формулы изобретения, и не смотря на то, разрешают они или нет какую-либо или все из тех же технических проблем, как исходное изобретение. Заявители настоящим уведомляют, что новая формула изобретения может быть сформулирована с использованием таких признаков и/или сочетаний признаков в ходе рассмотрения настоящей заявки или любой дополнительной заявки, выделенной из нее.
| название | год | авторы | номер документа |
|---|---|---|---|
| УШНОЙ ВКЛАДЫШ, УКАЗАТЕЛЬ ПОЛОЖЕНИЯ И СИСТЕМА ОБРАБОТКИ ВОЛОС | 2017 |
|
RU2733047C1 |
| УПРАВЛЕНИЕ УСТРОЙСТВОМ ДЛЯ ЛИЧНОЙ ГИГИЕНЫ | 2018 |
|
RU2753175C2 |
| СИСТЕМА, УСТРОЙСТВО И СПОСОБ АВТОМАТИЗИРОВАННЫХ ПРОЦЕДУР ОБРАБОТКИ ВОЛОС | 2018 |
|
RU2749100C2 |
| Машинка для стрижки волос, содержащая гребень | 2018 |
|
RU2758429C1 |
| ПРОГРАММИРУЕМАЯ СИСТЕМА ДЛЯ СТРИЖКИ ВОЛОС | 2014 |
|
RU2693665C2 |
| ОТОБРАЖЕНИЕ НАПРАВЛЯЮЩЕГО УКАЗАТЕЛЯ ПОЛЬЗОВАТЕЛЮ | 2017 |
|
RU2750596C2 |
| СИСТЕМА ПО УХОДУ С АДАПТИВНЫМ ОСВЕЩЕНИЕМ И СПОСОБ РАБОТЫ | 2017 |
|
RU2740291C2 |
| СЛЕЖЕНИЕ ЗА ПОЛОЖЕНИЕМ ДЛЯ СИСТЕМЫ ОБРАБОТКИ ВОЛОС | 2017 |
|
RU2745622C2 |
| Режущая головка и устройство для стрижки волос | 2016 |
|
RU2700884C2 |
| МАШИНКА ДЛЯ СТРИЖКИ ВОЛОС | 2014 |
|
RU2693584C2 |
Изобретение относится к системе для определения ориентации первого устройства относительно пользователя. Система содержит первое устройство, включающее в себя первый блок измерения ориентации, выполненный с возможностью измерения ориентации первого устройства относительно Земли, второе устройство, выполненное с возможностью ношения пользователем на части тела, причем второе устройство включает в себя второй блок измерения ориентации, выполненный с возможностью измерения ориентации второго устройства относительно Земли. Система также содержит блок обработки, выполненный с возможностью вычисления ориентации первого устройства относительно второго устройства посредством сравнения измеренной ориентации первого устройства относительно Земли с измеренной ориентацией второго устройства относительно Земли. 6 з.п. ф-лы, 5 ил.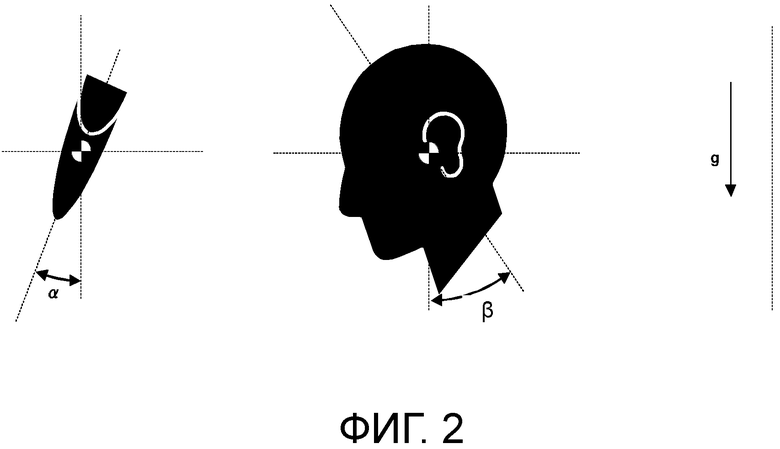
1. Система для определения ориентации устройства личной гигиены относительно пользователя, содержащая
первое устройство (100), включающее в себя первый блок (110) измерения параметров ориентации, содержащий акселерометр, и выполненное с возможностью размещения на устройстве личной гигиены,
второе устройство (200), выполненное с возможностью ношения пользователем на части тела так, что ориентация второго устройства указывает ориентацию части тела пользователя, причем второе устройство включает в себя второй блок (210) измерения параметров ориентации, содержащий акселерометр, и
блок (300) обработки, выполненный с возможностью вычисления параметров ориентации первого устройства относительно второго устройства посредством сравнения измеренных параметров ориентации первого устройства относительно Земли с измеренными параметрами ориентации второго устройства относительно Земли,
при этом первое устройство дополнительно содержит блок (120) измерения положения, выполненный с возможностью измерения относительного положения первого устройства ко второму устройству,
при этом упомянутая система выполнена с возможностью определения изменения в положении первого устройства за заданный период времени, используя блок измерения положения, определения ускорения первого устройства из-за изменения положения, измеренного во времени, и вычитания ускорений из-за изменения положения из измерений ускорения акселерометров первого блока измерения параметров ориентации и второго блока измерения параметров ориентации, чтобы измерять параметры ориентации первого и второго устройств относительно Земли,
при этом блок обработки выполнен с возможностью вычисления параметров ориентации первого устройства относительно второго устройства посредством выполнения геометрического вычитания измеренного параметра ориентации первого устройства относительно Земли из измеренного параметра ориентации второго устройства относительно Земли.
2. Система по п. 1, отличающаяся тем, что первое устройство (100) выполнено с возможностью регулирования функциональной возможности первого устройства на основании ориентации первого устройства относительно пользователя.
3. Система по п. 1 или 2, отличающаяся тем, что первое устройство (100) дополнительно содержит первый блок (130) связи и второе устройство (200) дополнительно содержит второй блок (230) связи, при этом второй блок связи выполнен с возможностью передачи измеренного параметра ориентации второго устройства относительно Земли к первому блоку связи.
4. Система по любому из пп. 1-3, отличающаяся тем, что блок (300) обработки расположен по меньшей мере в одном из следующего: первом устройстве (100), втором устройстве (200) и третьем устройстве.
5. Система по любому из пп. 1-4, отличающаяся тем, что первый блок (120) измерения положения содержит датчик электромагнитного поля или лазерный датчик расстояния.
6. Система по любому из пп. 1-5, отличающаяся тем, что первое устройство (100) дополнительно выполнено с возможностью регулирования функциональной возможности первого устройства на основании относительной ориентации первого устройства ко второму устройству (200) и относительного положения первого устройства ко второму устройству.
7. Система по любому из пп. 1-6, отличающаяся тем, что устройство личной гигиены является личным прибором, включающим в себя любое из следующего: электрической бритвы, машинки для стрижки волос, машинки для подравнивания бороды, электрической зубной щетки, фена, устройства ухода за кожей, очистительного прибора и косметического прибора.
| WO 2013163999 A1, 07.11.2013 | |||
| US 20140200734 A1, 17.07.2014 | |||
| WO 2013096572 A1, 27.06.2013 | |||
| ПРИБОР ДЛЯ УДАЛЕНИЯ ВОЛОС | 2006 |
|
RU2424895C2 |
| ПРИБОР ДЛЯ УДАЛЕНИЯ ВОЛОС | 2006 |
|
RU2402418C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КУРСА ПУТЕМ ПОВОРОТА ИНЕРЦИАЛЬНОГО УСТРОЙСТВА | 2010 |
|
RU2499223C1 |
| RU 2009115707 A, 10.11.2010 | |||
| ТРЕХОСНЫЙ ГИРОСКОПИЧЕСКИЙ БЛОК | 2007 |
|
RU2344287C2 |

