Область техники, к которой относится изобретение
Предметом данного изобретения является способ определения курса с помощью инерциального устройства, которое может использоваться, например, в качестве гирокомпаса и для определения направления севера.
Уровень техники
Известно, что курс определяют с помощью инерциального устройства типа гирокомпаса с трехкоординатными датчиками (прецессионными гироскопами или свободными гироскопами) и с двумя или тремя акселерометрами для измерения и позиционирования вращения Земли.
Известно, что для повышения точности определения курса измерение курса производится инерциальным устройством в двух различных угловых положениях относительно вертикальной оси. Данный метод известен под названием "двухпозиционное выравнивание".
Известны также вибрационные гироскопы, используемые, как правило, в инерциальных системах для навигации, например, как в гирокомпасе, приспособленном для измерения угла относительно опорного направления, которым является направление географического севера (курс). Вибрационные гироскопы являются осесимметричными, а их работа основана на эффекте ускорения Кориолиса, и поэтому они называются Кориолисовыми вибрационными гироскопами (КВГ), как, например, гироскопы с резонатором полусферической формы, называемые полусферическими резонансными гироскопами (ПРГ); как правило, считается, что они относятся к гороскопам I типа (см. "Type I and type II micro-machined vibratory gyroscopes" by Andrei M. Shkel, pp.586-593, IEEE/ION ("Institute of Electrical and Electronic Engineers/Institute of Navigation") PLANS 2006, San Diego, CA, USA). В частности, данные гироскопы работают без обратной связи и обеспечивают измерение абсолютного угла поворота на основании измеренного угла, называемого "электрическим" углом поворота, поскольку он характеризует направление вибрации гироскопа относительно измерительных электродов. Измерения, обеспечиваемые данными вибрационными гироскопами, характеризуются большой погрешностью, в значительной степени зависящей от направления вибрации относительно измерительных электродов. Таким образом, указанные погрешности изменяются в зависимости от направления вибрации, характеризуемого электрическим углом поворота.
Раскрытие изобретения
Целью настоящего изобретения является обеспечение средств для дальнейшего улучшения характеристик при определении курса с помощью инерциального устройства, представленного вибрационными гироскопами.
С этой целью настоящее изобретение предлагает способ определения курса с помощью инерциального устройства, обеспечивающего измерения посредством, как минимум, одного вибрационного гироскопа; указанный способ включает в себя следующие операции:
- установку инерциального устройства таким образом, чтобы ось гироскопа находилась практически в горизонтальной плоскости;
- позиционирование инерциального устройства последовательно определенное число раз относительно вертикальной оси; количество положений при этом должно быть больше единицы;
- настройку электрического угла поворота вибрационного гироскопа в каждом положении на заданную величину (причем данная заданная величина должна быть одинаковой для всех позиций) и выполнение измерений; и
- определение курса по результатам измерений и углу между вышеуказанными позициями.
Таким образом, учитывая определенное количество измерений и угол между положениями инерциального устройства относительно вертикальной оси при настройке электрического угла на одно и то же значение независимо от углового положения инерциального устройства и производя измерения в режиме свободного гироскопа, мы можем повысить точность определения курса. Управление угловым датчиком в режиме свободного гироскопа дает возможность, в частности, не учитывать погрешности коэффициента усиления, которые могут иметь место при работе в режиме прецессионного гироскопа. В случае если инерциальное устройство содержит не один указанный гироскоп, но и какой-либо другой датчик, например, другой гироскоп и/или, как минимум, один акселерометр, при определении курса используются измерения, сделанные всеми датчиками.
В первом примере осуществления изобретения устройство включает в себя, как минимум, два гироскопа, и его позиционируют таким образом, чтобы оси обоих гироскопов находились практически в горизонтальной плоскости; заданное количество положений, в которое устанавливают устройство, не меньше двух, а угол между положениями, предпочтительно, составляет 180°.
Уход, замеренный для обоих угловых датчиков, является одинаковым для всех положений, и позиционирование датчиков в двух противоположных угловых положениях устраняет гармонические погрешности измерений (при заданном значении электрического угла), поскольку они исчезают при вычислении средней величины. Данный способ исполнения чрезвычайно прост, и поворот на 180° представляет собой наилучшую конфигурацию, поскольку он обеспечивает устранение погрешностей измерений каждого гироскопа в горизонтальной плоскости при взятии средней величины, и, таким образом, дает возможность определения курса, не зависящего от погрешности ухода используемых двух горизонтальных гироскопов. Данное исполнение с выполнением измерений в двух положениях является наилучшим компромиссом между продолжительностью операции измерения и получаемым качеством результатов.
Во втором примере возможного осуществления инерциальное устройство содержит только один гироскоп; заданное число положений при измерениях должно быть не менее двух и предпочтительно не менее трех.
Два положения необходимы для определения курса, и еще одно дополнительное положение - для определения ухода. При двух положениях имеются два измерения и два соответствующих уравнения ухода; это дает возможность вычислить курс путем осреднения результатов измерений, осредняя тем самым также и погрешность ухода, и повторно ввести полученное значение курса в одно из двух уравнений. Таким образом, можно получить приблизительное значение погрешности ухода и уточнить вычисленное значение курса. С тремя позициями операция проще, поскольку имеются результаты трех измерений и три соответствующих уравнения для определения трех неизвестных: курса, поворота в плоскости и ухода гироскопа. При трех положениях угол между ними предпочтительно равен 120°.
Таким образом, предлагаемый настоящим изобретением способ может быть применен к инерциальным устройствам, имеющим лишь один гироскоп, и он обеспечивает хорошие характеристики.
В соответствии с отличительным признаком настоящего изобретения перемещение инерциального устройства из одного вышеупомянутого положения в другое производится с помощью поворотной платформы, обеспечивающей возможность поворота на заданный угол.
Таким образом, инерциальное устройство является более простым, так как больше не требуется определять угол между двумя угловыми положениями инерциального устройства, поскольку значение данного угла задается заранее.
Предпочтительно, используемое инерциальное устройство имеет, как минимум, один акселерометр с одним гироскопом, или, как минимум, два акселерометра, как минимум, с двумя гироскопами; результаты измерений акселерометров обрабатываются с целью определения погрешности позиционирования инерциального устройства относительно горизонтальной плоскости, т.е. определения являющегося помехой вращения системы.
Таким образом, инерциальное устройство можно с большей точностью позиционировать относительно горизонтальной плоскости. Это облегчает позиционирование инерциального устройства в условиях эксплуатации. Акселерометры могут обеспечивать позиционирование системы относительно горизонтальной плоскости (гравитация) и измерять любое мешающее вращение системы.
Предпочтительно, электрический угол поворота выбирается таким образом, чтобы соответствующее значение ухода было минимальным.
Это обеспечивает дополнительное повышение точности определения курса.
Другие отличительные признаки и преимущества настоящего изобретения станут ясны после ознакомления с приведенным ниже описанием одного из возможных вариантов его осуществления, не являющимся ограничивающим.
Краткое описание чертежей
Ниже приводится перечень прилагаемых чертежей, среди которых:
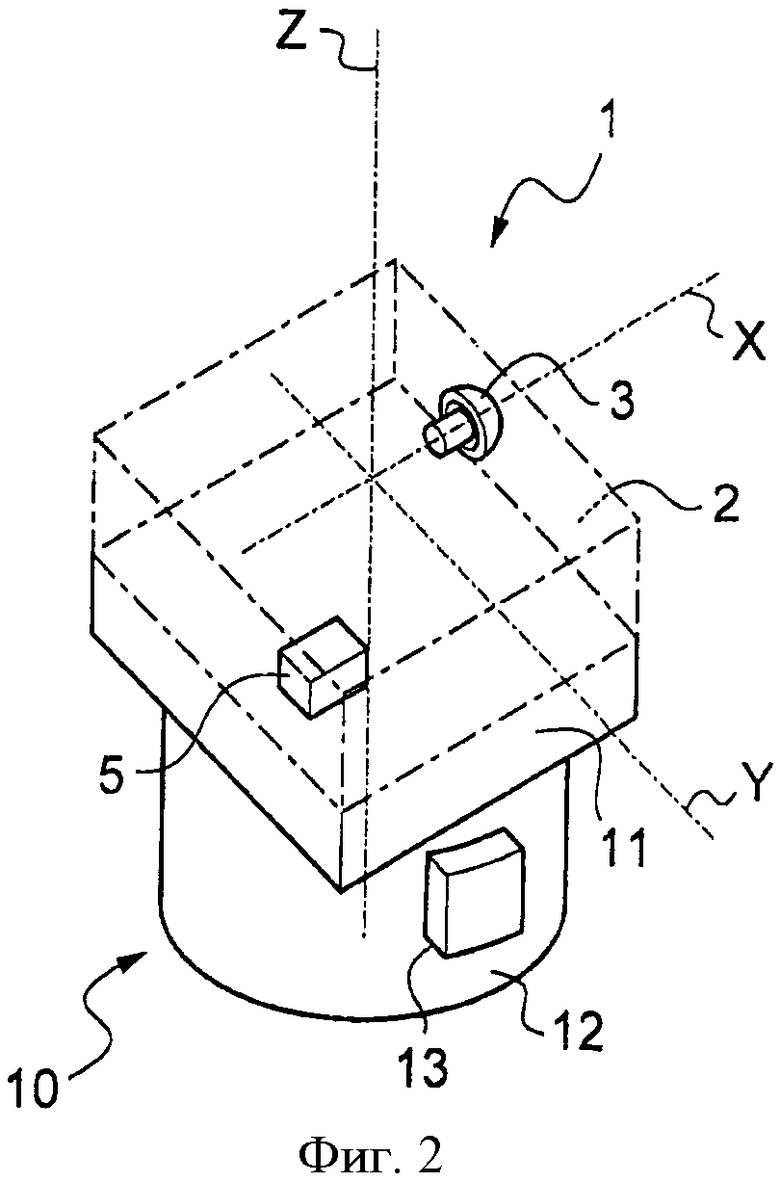
фиг.1 - схематическое изображение инерциального устройства для реализации способа, предлагаемого настоящим изобретением, в первом варианте исполнения; и
фиг.2 - вид, аналогичный представленному на фиг.1, инерциального устройства, выполненного по второму варианту осуществления изобретения.
Осуществление изобретения
Как показано на фиг.1, предлагаемый настоящим изобретением способ реализуется с помощью инерциального устройства 1, в состав которого входит платформа 2 (показана штрихпунктирными линиями), выполненная известным способом с тремя вибрационными угловыми датчиками или гироскопами 3, и с тремя акселерометрами 4. Гироскопы 3 и акселерометры 4 расположены по трем взаимно перпендикулярным осям системы координат. Конструкция гироскопов 3 и акселерометров 4 известна. С целью пояснения способа, предлагаемого настоящим изобретением, в данном описании будет рассмотрена немного подробнее только конструкция гироскопа 3. Каждый гироскоп 3 включает в себя выполненный из кварца осесимметричный резонатор, оснащенный электродами, которые в режиме возбуждения служат для приведения резонатора в колебательное движение, симметричное относительно оси, перпендикулярной оси симметрии гироскопа 3; угловое положение резонатора относительно оси симметрии может регулироваться с помощью управляющего устройства 5, посредством электрического регулирования электродов соответствующим способом, известным под названием "контроль прецессии". Угловое направление вибрации называется электрическим углом поворота. Указанные электроды используются также в режиме обнаружения для определения углового направления вибрации. В режиме измерения, который реализуется способом, предлагаемым настоящим изобретением, ориентацию вибрации относительно оси оставляют свободной, и смещение вибрации относительно исходного направления можно использовать для получения информации относительно изменения углового положения датчика.
Гироскопы 3 и акселерометры 4 соединены с управляющим устройством 5, осуществляющим управление гироскопами 3, а также служащим для получения и обработки сигналов от гироскопов 3 и акселерометров 4. Показанное здесь инерциальное устройство 1 представляет собой обычное инерциальное устройство, используемое в навигации.
Управляющее устройство 5 предназначено для реализации управления инерциальным устройством в режиме гирокомпаса. Данная программа осуществляет предлагаемый настоящим изобретением способ определения курса, в частности, определения направления севера.
Предлагаемый способ включает в себя следующие операции:
- установку инерциального устройства 1 последовательно в двух угловых положениях относительно вертикальной оси Z;
- регулировку электрических углов гироскопов 3 в горизонтальной плоскости на заданное значение и проведение соответствующих измерений для каждого углового положения; и
- определение курса по результатам измерений и углу между вышеуказанными положениями.
Два указанных положения смещены относительно друг друга на 180°.
Заданное значение электрического угла поворота является одинаковым для всех угловых положений инерциального устройства. В данном способе осуществления изобретения электрический угол поворота предпочтительно выбирается таким образом, чтобы соответствующее значение ухода было минимальным.
Для каждого положения заданный электрический угол поворота контролируется с помощью вибрационных угловых датчиков 3, расположенных на осях X и Y горизонтальной плоскости. Значение электрического угла поворота при измерениях во всех положениях устанавливается одинаковым с помощью команды контроля прецессии (во время и/или после изменения положения инерциального устройства).
Сигналы, поступающие от вибрационных угловых датчиков и акселерометров, измеряются для определения курса, возможно, с помощью известной широты системы. Данное вычисление производится известным способом, например, с помощью регрессий и тригонометрических формул, или путем интеграции результатов измерений в навигационную модель и фильтр Калмана.
После выполнения измерений в первом положении инерциальное устройство устанавливают во второе положение. Смещение между данными двумя положениями измеряется с помощью гироскопов 3.
Затем для обоих гироскопов 3, расположенных в горизонтальной плоскости, производится регулировка электрического угла поворота для получения такого же значения электрического угла поворота, как и при первом измерении.
Поступающие от датчиков сигналы регистрируются, и затем производится определение курса, как и ранее.
Затем производится окончательное определение курса путем вычисления среднего значения между двумя полученными значениями курса, что дает возможность осреднить погрешности предыдущих измерений. В способе определения курса с помощью навигационной модели и, например, фильтра Калмана, эта операция производится непосредственно.
Для двух положений, смещенных относительно друг друга на угол, отличающийся от 180°, точность определения курса также повышается.
На фиг.2 показан еще один вариант осуществления предлагаемого настоящим изобретением способа, а именно с помощью инерциального устройства 1, включающего в себя платформу 2 с установленным на ней только одним гироскопом 3, служащим для позиционирования в горизонтальной плоскости. Инерциальное устройство установлено на поворотном устройстве 10, включающем в себя поворотный стол 11, установленный на поворотном основании 12, обеспечивающем возможность поворота поворотного стола 11 относительно перпендикулярной к нему оси. Поворотное основание 12 включает в себя систему регулирования 13 для регулирования угла поворотного стола относительно его оси вращения. Данный тип системы регулирования угла известен; он применяется, например, в делительных дисках металлорежущих станков. Например, система регулирования угла может содержать устройства для фиксации поворотного стола в заданных положениях (фиксирующие элементы, например, могут включать в себя радиальный болт, прикрепленный к поворотному столу, который вставляется поворотного основания 12 поворотного устройства). Поворотный стол 11 выставляется горизонтально, например, с помощью уровнемеров, закрепленных на поворотном устройстве 10. В случае применения акселерометров в инерциальном устройстве 1, они могут использоваться для определения угла наклона поворотного стола поворотного устройства и прикрепленного к поворотному столу инерциального устройства, таким образом, что угол наклона можно будет учитывать известным способом для определения погрешности позиционирования инерциального устройства относительно горизонтальной плоскости с целью определения курса.
Данный способ включает операции вращения поворотного стола с целью установки инерциальной системы последовательно в трех положениях. Данные три положения смещены относительно друг друга на 120°. В качестве варианта, можно использовать четыре положения, смещенных относительно друг друга на 90°, или даже большее число угловых положений.
Когда поворотный стол установлен неподвижно в каждом положении, производится переустановка электрического угла поворота в заданное положение, и выполняется измерение.
Измерения производятся так, как было описано выше.
Естественно, настоящее изобретение не ограничивается описанными выше конкретными примерами осуществления; оно охватывает и все другие варианты в пределах сферы изобретения, определяемой приведенной формулой.
В частности, инерциальное устройство может иметь любое другое количество гироскопов или акселерометров, но инерциальное устройство, тем не менее, должно иметь, как минимум, один гироскоп.
Заданное количество положений может быть больше двух в первом варианте осуществления, и различия могут быть произвольными.
Во втором варианте осуществления изобретения различия между положениями могут быть произвольными.
Метод реализации предлагаемого изобретением способа может быть распространен на системы с неперпендикулярными осями.
Метод реализации может быть также распространен на вибрационные гироскопы с двумя осями.
Реализация может носить как непрерывный (например, с помощью фильтра Калмана), так и дискретный характер.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КУРСА ПУТЕМ ПОВОРОТА ИНЕРЦИАЛЬНОГО УСТРОЙСТВА | 2010 |
|
RU2499225C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ДИНАМИЧЕСКИЙ ГИРОКОМПАС | 2020 |
|
RU2754964C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТЕЙ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ ПРИБОРОВ ПРИ ИСПЫТАНИЯХ НА УДАРНЫЕ И ВИБРАЦИОННЫЕ ВОЗДЕЙСТВИЯ | 2013 |
|
RU2545489C1 |
| СПОСОБ ГИРОКОМПАСИРОВАНИЯ С ПРИМЕНЕНИЕМ ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ И КОМБИНИРОВАННОЙ КОМПЕНСАЦИИ ЕГО ДРЕЙФА | 2001 |
|
RU2189564C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КУРСА В НАПРАВЛЕНИИ ГЕОГРАФИЧЕСКОГО СЕВЕРА ПРИ ПОМОЩИ ИНЕРЦИАЛЬНОГО СЧЕТЧИКА ТЕКУЩИХ КООРДИНАТ | 2009 |
|
RU2463558C1 |
| Способ определения параметров ориентации объекта при помощи полуаналитической инерциальной навигационной системы с географической ориентацией осей четырехосной гироплатформы | 2022 |
|
RU2782334C1 |
| ГИРОГОРИЗОНТКОМПАС | 2014 |
|
RU2550592C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| СИСТЕМА КУРСОКРЕНОУКАЗАНИЯ | 2000 |
|
RU2171450C1 |
| ГИРОКОМПАС | 2013 |
|
RU2544295C1 |
Изобретение относится к навигации и может быть использовано, например, в качестве гирокомпаса и для определения направления севера. Способ определения курса осуществляется с помощью инерциального устройства (1), обеспечивающего измерения посредством, как минимум, одного вибрационного гироскопа (3), и включает в себя установку инерциального устройства таким образом, чтобы ось гироскопа находилась практически в горизонтальной плоскости, позиционирование инерциального устройства последовательно определенное число раз относительно вертикальной оси, количество положений при этом должно быть больше единицы, настройку электрического угла поворота вибрационного гироскопа в каждом положении на заданную величину (причем данная заданная величина должна быть одинаковой для всех позиций) и определение курса по результатам измерений и углу между вышеуказанными позициями. Изобретение позволяет использовать более простое инерциальное устройство и повысить точность измерений. 9 з.п. ф-лы, 2 ил.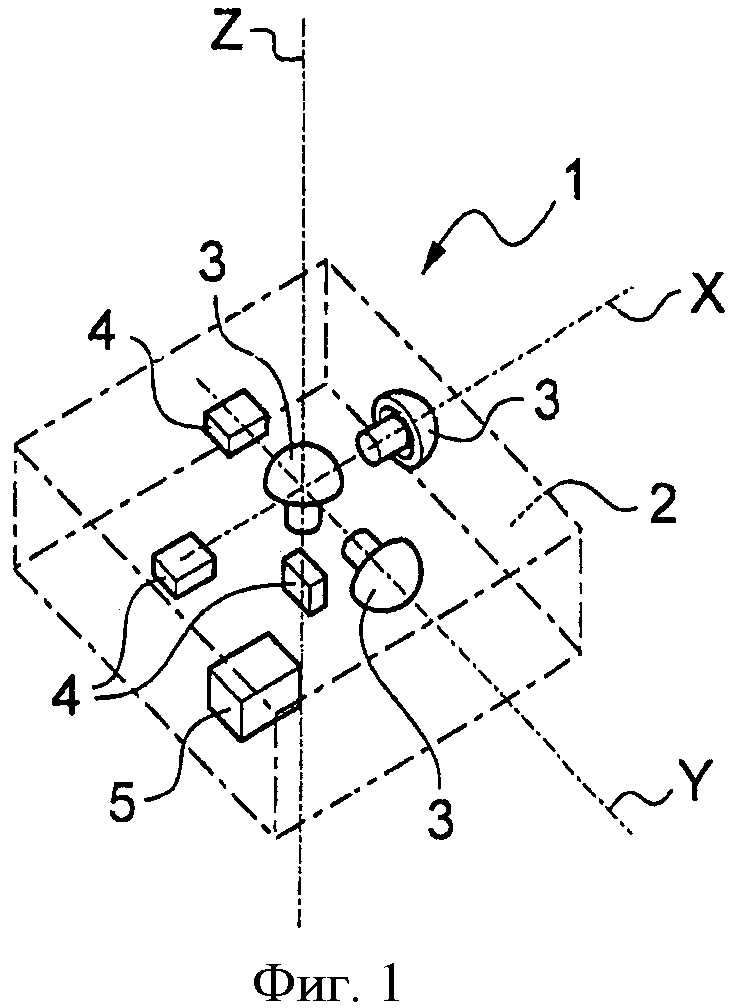
1. Способ определения курса с помощью инерциального устройства (1), обеспечивающего измерения посредством, как минимум, одного вибрационного гироскопа (3), включающий в себя следующие операции:
установку инерциального устройства таким образом, чтобы ось гироскопа находилась практически в горизонтальной плоскости;
позиционирование инерциального устройства последовательно определенное число раз относительно вертикальной оси; количество положений при этом должно быть больше единицы;
настройку электрического угла поворота вибрационного гироскопа в каждом положении на заданную величину (причем данная заданная величина должна быть одинаковой для всех позиций) и выполнение измерений; и
определение курса по результатам измерений и углу между вышеуказанными позициями.
2. Способ по п.1, при котором инерциальное устройство содержит только один гироскоп, заданное число положений при измерениях не менее двух, и предпочтительно не менее трех.
3. Способ по п.2, при котором угол между указанными двумя положениями равен 120°.
4. Способ по п.1, при котором инерциальное устройство включает в себя, как минимум, два гироскопа, устанавливаемые таким образом, чтобы оси обоих гироскопов находились практически в горизонтальной плоскости; заданное количество положений должно быть не меньше двух.
5. Способ по п.4, при котором угол между указанными двумя положениями равен 180°.
6. Способ по п.1, при котором перемещение инерциального устройства из одного положения в другое осуществляется с помощью поворотной платформы (11), обеспечивающей возможность поворота на заданный угол.
7. Способ по п.1, при котором инерциальное устройство (1) включает в себя, как минимум, один акселерометр с одним гироскопом или, как минимум, два акселерометра, как минимум, с двумя гироскопами; результаты измерений акселерометров обрабатываются с целью определения погрешности позиционирования инерциального устройства относительно горизонтальной плоскости, а также любого мешающего вращения системы.
8. Способ по п.1, при котором электрический угол поворота выбирается таким образом, чтобы соответствующее ему значение ухода было минимальным.
9. Способ по п.1, при котором курс определяется посредством вычисления среднего значения выполненных измерений.
10. Способ по п.1, при котором определение курса производится посредством интеграции результатов измерений в навигационную модель или с помощью фильтра Калмана.
| Колосоуборка | 1923 |
|
SU2009A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИСТИННОГО КУРСА С ПОМОЩЬЮ ДВУХКАНАЛЬНОГО ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 2000 |
|
RU2176780C1 |
| US 6473713 B1, 29.10.2002 | |||
| Машина для сварки арматурных сеток | 1956 |
|
SU109784A1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| СПОСОБ ПРОИЗВОДСТВА ЦИКОРНО-ЯБЛОЧНО-ЧЕРНОПЛОДНОРЯБИНОВОГО НАПИТКА | 2008 |
|
RU2369188C1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| СПОСОБ ГИРОКОМПАСИРОВАНИЯ С ПРИМЕНЕНИЕМ ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ ПРИ НЕТОЧНОЙ ВЫСТАВКЕ ГИРОСКОПА НА ОБЪЕКТЕ | 2004 |
|
RU2267748C1 |

