Изобретение относится к области навигационной техники, а именно к гироскопической аппаратуре, используемой преимущественно в составе бортовых инерциальных навигационных систем миниатюрного исполнения.
Трехосные гироскопические блоки предназначаются для определения проекций входных угловых скоростей на оси чувствительности их гироскопических датчиков. Помимо гироскопических блоков, в упомянутых выше системах обычно используют и другие базовые чувствительные элементы, например акселерометры, предназначенные для измерения ускорений, обслуживающую указанную аппаратуру бортовую электронику и пр.
Инерциальные навигационные системы в целом позволяют решать комплексную задачу навигации объекта, заключающуюся в определении параметров его движения, а именно координат объекта, величины и направления его скорости.
Благодаря своим особым потребительским качествам, обусловленным в основном миниатюрностью исполнения (поперечные размеры ограничены цилиндрической поверхностью диаметром не более 40 мм), высоким весовым совершенством, вибропрочностью (амплитудой 40g в частотном диапазоне от 3 до 250 Гц), точностными характеристиками (случайная составляющая дрейфа на уровне 0,1 град./ч), способностью противостоять перегрузкам (до 60g при длительности импульса 8÷12 мс) и функционировать в достаточно широком диапазоне температуры (от - 40 до +80°С), а также малым энергопотреблением (порядка 4 Вт) и временем подготовки к работе (5 с) и пр., заявленный гироскопический блок может без особых затруднений размещаться на различного рода подвижных объектах с ограниченным монтажным объемом и энергопитанием, эксплуатируемых в экстремальных условиях. В частности, гироскопический блок может органически встраиваться в используемые для контроля геометрических параметров нефтегазовых скважин забойные телеметрические системы (ЗТС), располагаемые непосредственно на борту буровой колоны. В этом случае определение параметров скважин осуществляется без нарушения процесса бурения. Реализуемая на практике технология бурения подразумевает чередование непосредственного бурения с относительно небольшими остановками, используемыми обычно для наращивания очередной трубы. Поэтому, с учетом вышеупомянутого быстродействия заявленного трехосного гироскопического блока, задача определения угловой ориентации скважины в данном случае может быть успешно решена именно в моменты технологических остановок, т.е. фактически без каких-либо отклонений от существующей технологии бурения.
Помимо измерения угловой ориентации, ЗТС позволяет определить и ряд дополнительных технологических параметров скважины. В принципе, заявленный трехосный гироскопический блок может быть использован для измерения углового положения скважины и традиционным способом, а именно - в составе соответствующего, подвешиваемого на кабеле или тросе, автономного скважинного инклинометра.
Однако измерения углового положения скважины таким способом не технологичны, поскольку спуск инклинометра в забой и подъем его оттуда осуществляется в данном случае при остановленной буровой и могут занимать несколько часов. При этом в ряде случаев, даже при относительно небольшой частоте контроля кривизны скважины, связанные с этим непроизводственные затраты могут оказаться неприемлемыми.
Настоятельная необходимость создания гироскопической аппаратуры нового поколения, подобного заявленной, очевидна и обусловлена, в основном, двумя соответствующими факторами. К первому можно отнести резкое наращивание в последнее время объемов бурения нефтяных и газовых скважин и возрастание числа горизонтальных, направленных и морских скважин, при прокладке которых необходимы частые замеры их кривизны. Второй связан с тем, что подавляющее количество из эксплуатируемых сегодня отечественных и зарубежных инклинометров построено на традиционной элементной базе и относительно устаревших технических решениях, не отвечающих современному техническому уровню, а следовательно, не обеспечивающих конкурентоспособности на рынке оборудования рассматриваемого класса.
Помимо нефтегазовой отрасли указанное изобретение может быть использовано в традиционных отраслях хозяйства (авиации, морсом флоте, ракетной и космической технике), а также при проведении некоторых специальных работ.
Известно достаточно большое количество аналогов изобретения как отечественной, так и зарубежной разработки [см., например, «Инженерный справочник по космической технике» под редакцией проф..., докт. техн. наук А.В.Солодова. М., «Воениздат», 1969, ББК 6Т6 (083), УДК 629.19 (083), стр.350-361; D.Lynch, A.Matthews, G.N.Varty, Материалы симпозиума по гироскопической технологии в Штутгарте (Германия), 1977, стр.9.0.-9.21); «Спутник буровика». Иогансен К.В. М., «Недра», 1981, УДК 622.24 (031), стр.152, табл.136, рис.26; «Физический энциклопедический словарь», глав. ред. А.М.Прохоров, ред. колл. Д.М.Алексеев и др. М.: «Советская энциклопедия», 1984, ББК 53 (03), Ф50, стр.125-127, 276, 277; Ковшов Г.Н., Алимбеков Р.И., Жибер А.И. Инклинометры. - Уфа: Гилем, 1998. - 380 с.; «Практикум по инженерной геодезии», под ред. проф., докт. тех. наук В.Е.Новака. Изд. третье, перераб. и доп. М., «Недра», 1987, УДК 528.48, стр.169-176; Пат. US 5.712.427, G01P 009/04, 22.01.98 г.; Ковшов Г.Н., Бодунов С.Б. «Гироинклинометр для измерения при бурении». Совместная научная сессия Секции навигационных систем и их чувствительных элементов и С.-Петербургской секции прецизионной гироскопии по теме: «Скважинная навигация, инклинометрия и навигация»: Тезисы докл. - Гироскопия и навигация. 1999. - №3. - стр.25; Бодунов Б.П., Бодунов С.Б., Лопатин В.М., Чупров В.П. «Разработка и испытание волнового твердотельного гироскопа для использования в инклинометрической системе» - VII Санкт-Петербургская международная конференция по интегрированным навигационным системам: Тез: докл. - Гироскопия и навигация. 2001, №2, стр.121].
В большинстве известных инклинометров до настоящего времени используются азимутальные датчики на основе однокатушечных феррозондовых преобразователей, измеряющих проекции вектора магнитного поля Земли (см. упомянутый выше «Физический энциклопедический словарь», стр.808). Существенным недостатком этих датчиков является их чувствительность к ферромагнитным аномалиям, обусловленным, в частности, использованием обсадочных труб из магнитомягких материалов.
Измерительные датчики других инклинометров относятся к гироскопической аппаратуре так называемого классического типа. Чувствительным элементом таких гироскопов является вращающийся ротор, ось которого может изменять свое направление в пространстве. Указанные гироскопы длительное время применялись в большинстве навигационных систем и в некоторых областях используются в настоящее время. Классические гироскопы отличаются сложностью конструкции, использованием в своем составе ротора, подшипников и других вращающихся частей. По этой причине такие приборы имеют также низкую вибрационную и ударную прочность, ограниченный ресурс работы, высокую потребляемую мощность. Для сохранения же точностных характеристик этих гироскопов в широком диапазоне температур требуется введение системы термостатирования, что существенно усложняет систему в целом.
Несмотря на продолжительное господство классических гироскопов и значительные усилия, направленные на улучшение их характеристик, постепенно предпочтение в навигационной технике стало отдаваться гироскопам нового поколения, работа которых основывается на иных физических принципах, например квантовым и вибрационным (см. «Физический энциклопедический словарь», стр.127, 276, 277).
К первым из них относятся волоконно-оптические, лазерные и ядерные гироскопы. В основу принципа действия их положено использование особых свойств атомных ядер и электронных частиц, поведение которых описывается законами квантовой механики. Квантовые гироскопы безинерционны, обладают соответствующей стабильностью свойств и могут работать в широком диапазоне температур. Однако они тоже сложны в исполнении, обладают большими габаритными размерами. В связи с рассмотренными особенностями исполнения, а также неспособностью выдержать в течение длительного периода времени эксплутацию в упомянутых выше экстремальных условиях и по ряду других причин практическое использование классических приборов в составе инклинометрического оборудования пока проблематично. Именно поэтому сегодня в практике большинства из отечественных и зарубежных фирм почти нет гироскопических инклинометров указанного типа, непосредственно встраиваемых в конструкцию буровых колонн и обеспечивающих оперативное получение необходимой информации об угловом положении скважин без нарушения существующей технологии бурения.
Вибрационные гироскопы содержат в качестве чувствительного элемента не вращающийся ротор, а вибрирующее тело. Среди них особое место занимают твердотельные волновые гироскопы с полусферическим резонатором.
В основу принципа действия их положен эффект чувствительности вибрирующей твердотельной, в данном случае полусферической оболочки, к вращению основания. Конструктивно они предельно просты в исполнении, поскольку состоят всего из трех или двух функциональных частей, изготовленных из кварцевого стекла, жестко связанных между собой и основанием. По этой причине такие гироскопы и называют твердотельными.
Отличительной особенностью твердотельных волновых гироскопов является полное отсутствие в их конструкции движущихся (вращающихся) частей. Колебания полусферического резонатора (оболочки) происходит только в пределах упругих деформаций (амплитудой колебаний 1 микрон, например, на звуковой частоте 8000 Гц). Вследствие простоты конструкции и использования минимального количества деталей такие приборы обладают повышенной надежностью в условиях ударов и вибраций, имеют небольшие габариты, массу и низкое энергопотребление. В них нет также узлов и деталей, которые бы являлись источниками теплового излучения. В зависимости от способа реализации электронных систем твердотельного волнового гироскопа он может функционировать как в режиме непосредственного измерения скорости, так и в режиме ее интегрирования.
Из числа известных аналогов заявленного технического решения ближайшим (прототипом) может служить использованный в составе соответствующего забойного инклинометра трехосный гироскопический блок бортовой инерциальной навигационной системы, конструктивное исполнение и описание которого приведены в пат. US 6.453.239 B1, Е21В 47/22, 17.09.2002 г. Известный трехосный гироскопический блок бортовой инерциальной навигационной системы содержит вакуумируемый посредством обезгаживания на протяжении всего срока эксплуатации механический корпус цилиндрической конфигурации с соответствующими установочно-присоединительными элементами и три герметично встроенные в него с последовательным расположением один за другим ортогонально ориентированные относительно друг друга одноосных твердотельных волновых гироскопа. При этом каждый из твердотельных волновых гироскопов выполнен из двух изготовленных из кварцевого стекла и скрепленных между собой основных функциональных деталей и снабжен соответствующими гермовыводами и токопроводами для присоединения к обслуживающему гироскопы блоку электроники вышеупомянутой системы.
Одной из этих деталей является снабженный центральным держателем стержневого типа полусферический резонатор, а другой - располагаемая с зазором внутри него электромеханическая плата, примыкающая к внутренней поверхности полусферы, фрагмент которой сформирован в виде шарового сегмента с центральной выборкой и соответствующими металлизированными электродами круглой, трапециевидной или иной формы, использованными для возбуждения резонатора и регистрации его колебаний.
В скрепленном виде указанные детали каждого из твердотельных волновых гироскопов размещают с обеспечением герметизации в снабженных автономными газопоглотителями вакуумируемых металлических корпусных секциях. И далее, в процессе монтажа собранных таким образом твердотельных волновых гироскопов на общей корпусной детали (секции), вышеупомянутый корпус становится многосекционным.
Из вышерассмотренных именно трехосные гироскопические блоки на основе твердотельных волновых гироскопов (ТВГ) с чувствительным элементом в виде полусферического резонатора наиболее всего подходят для решения навигационных задач, связанных с ориентацией буровых скважин, поскольку благодаря относительно небольшим габаритам и малому энергопотреблению они могут встраиваться в конструкцию многих типоразмеров существующих инклинометров.
Недостатки известного гироскопического блока обусловлены, в основном, вышерассмотренными особенностями конструктивного исполнения корпуса, а также размещением на нем большого количества газопоглотителей и рядом других причин. Так, вследствие многосекционности исполнения металлоконструкция известного блока нерациональна. Указанная особенность значительно усложняет сборку изделия и приводит в увеличению его габаритов и массы. Такой же негативный вклад привносит и наличие большого количества газопоглотителей. Очевидно также, что наличие в известном блоке большого количества составных частей и используемых для сопряжения соединений, помимо вышеотмеченного, делают его конструкцию менее жесткой и недостаточно надежной. Кроме того, наличие избыточного количества деталей в конструкции ТВГ приводит к низкой стабильности взаимного расположения осей чувствительности гироскопов, установленных в составе единого корпуса, при изменении температуры.
Задачей настоящего изобретения является устранение вышерассмотренных недостатков известных аналогов и прототипа заявляемого трехосного гироскопического блока, а именно - улучшение его технико-эксплуатационных качеств, позволяющих достигнуть современного технического уровня и конкурентоспособности такого рода оборудования, а также соответствующего снижения стоимости и сокращения сроков его создания. В соответствии с изобретением она достигается конкретной совокупностью существенных признаков заявленного гироскопического блока, приведенной ниже по тексту.
К совокупности существенных признаков, характеризующих заявленный трехосный гироскопический блок бортовой инерциальной навигационной системы, относятся:
1) выполнение гироскопического блока трехосным;
2) принадлежность гироскопического блока к бортовой инерциальной навигационной системе;
3) наличие вакуумируемого, с обеспечением обезгаживания посредством поглощения, металлического корпуса цилиндрической конфигурации с соответствующими установочно-присоединительными элементами;
4) наличие трех герметично встроенных в корпус одноосных твердотельных волновых гироскопов;
5) последовательное расположение гироскопов один за другим;
6) непараллельная и, в частности, ортогональная ориентация гироскопов по отношению друг к другу;
7) выполнение гироскопов из двух изготовленных из кварцевого стекла и скрепленных между собой деталей, одной из которых является снабженный центральным держателем стержневого типа полусферический резонатор, а другой - располагаемая с зазором внутри последнего электромеханическая плата;
8) выполнение примыкающего к внутренней поверхности полусферы фрагмента платы в виде шарового сегмента с центральной выборкой и восемью электродами трапециевидной формы, используемыми для возбуждения резонатора и регистрации его колебаний;
9) снабжение каждого из твердотельных волновых гироскопов соответствующими гермовыводами и токоподводами для подсоединения к обслуживающему гироскопы блоку электроники вышеупомянутой системы;
10) металлизация наружной и торцевой поверхностей полусфер резонаторов каждого из гироскопов для формирования рабочей емкости между резонатором и электромеханической платой;
11) формирование электродов круглой, трапециевидной или иной формы на наружной шарообразной поверхности электромеханических плат;
12) выполнение вакуумируемого корпуса гироскопического блока в виде односекционной монолитной детали стержневого типа;
13) формирование в теле корпуса гироскопического блока четырех последовательно расположенных одно за другим посадочных гнезд, три из которых непараллельно и, в частности, ортогонально ориентированы по отношению друг к другу и предназначены для размещения в них твердотельных волновых гироскопов, а четвертое - под единый для всех вакуумируемых полостей газопоглотитель с поглощающей способностью, рассчитанной на весь срок эксплуатации блока;
14) сообщение полостей всех посадочных гнезд между собой общим вакуумным каналом;
15) ограничение вакуумируемого объема корпуса с одной из торцевых сторон последнего телом продольно-ориентированного гироскопа, а с другой - используемым для откачки и обезгаживания ниппелем;
16) жесткое соединение резонаторов и электромеханических плат каждого из гироскопов напрямую посредством клеевого соединения или методом пайки, без использования каких-либо промежуточных деталей;
17) подвеска резонаторов и электромеханических плат каждого из гироскопов в сочлененном виде через прикрепленные к ним металлические стыковочные крышки, снабженные развитыми кольцевидными присоединительными буртиками, на опорно-установочных поверхностях посадочных гнезд корпуса с ориентацией полусферами резонаторов в сторону донной части гнезд и жестким закреплением и герметизацией по месту монтажа посредством сварки;
18) заглубление поперечно ориентированных гироскопов в посадочные гнезда заподлицо с внешними обводами цилиндрической поверхности корпуса;
19) экранировка продольно ориентированного гироскопа снаружи присоединяемым к торцевой части корпуса защитным металлическим хвостовиком;
20) размещение используемых для соединения электродов плат гироскопов с блоком обслуживающей их электроники;
21) формирование в корпусе для прокладки токоподводов монтажных пазов;
22) выполнение прокладки токоподводов по кратчайшим трассам с дискретным закреплением их в монтажных пазах при помощи соответствующей мастики или герметика;
23) установка газопоглотителя в посадочное гнездо корпуса с таким же заглублением, как и поперечно ориентированных гироскопов с жестким закреплением и герметизацией посредством сварки;
24) выполнение установочно-присоединительных элементов, обеспечивающих механическое сопряжение корпуса гироскопического блока с другими частями, например блоком акселерометров, инерциальной навигационной системы и бортом объекта и, в частности, скважинного инклинометра, на котором она размещается на одном из концов корпуса в виде сформированного в теле его защитного хвостовика резьбового присоединителя, а с противоположной стороны - в виде прикрепленной к корпусу посредством болтового соединения съемной переходной втулки, снабженной соответствующими соосно расположенными посадочными поверхностями, стыковочными отверстиями, элементами позиционирования сопрягаемых частей относительно друг друга и встроенным в нее осевым электрическим присоединителем;
25) выполнение невакуумируемой части металлического корпуса с дополнительно сформированными в ее теле тремя последовательно расположенными одна за другой резервными полостями непараллельно и, в частности, ортогонально ориентированными по отношению друг к другу и предназначенными для размещения в них акселерометров навигационной системы либо без них.
Совпадающими в прототипе и заявляемом изобретении являются первые одиннадцать существенных признаков, приведенных в данном перечне, а остальные - отличительными. При этом все указанные признаки относятся к существенным, поскольку каждый из них существенным образом (в той или иной мере) влияет на достигаемый при осуществлении заявляемого изобретения результат, т.е. находится с ним в причинно-следственной связи.
Характер указанного влияния, применительно к каждому из отличительных признаков, детально рассмотрен ниже по тексту при пояснении сущности заявленного изобретения.
Сущность заявляемого изобретения поясняется чертежом, где изображены:
на фиг.1 - общий вид, в разрезе, заявленного трехосного гироскопического блока (установочно-присоединительный элемент поз.5 не показан);
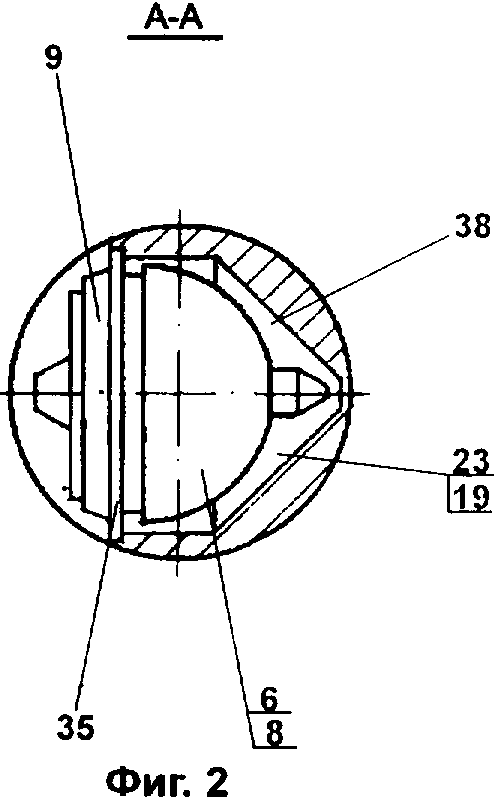
на фиг.2 - поперечный разрез А-А (см. фиг.1) гироскопического блока по месту расположения одного из поперечно ориентированных твердотельных волновых гироскопов;
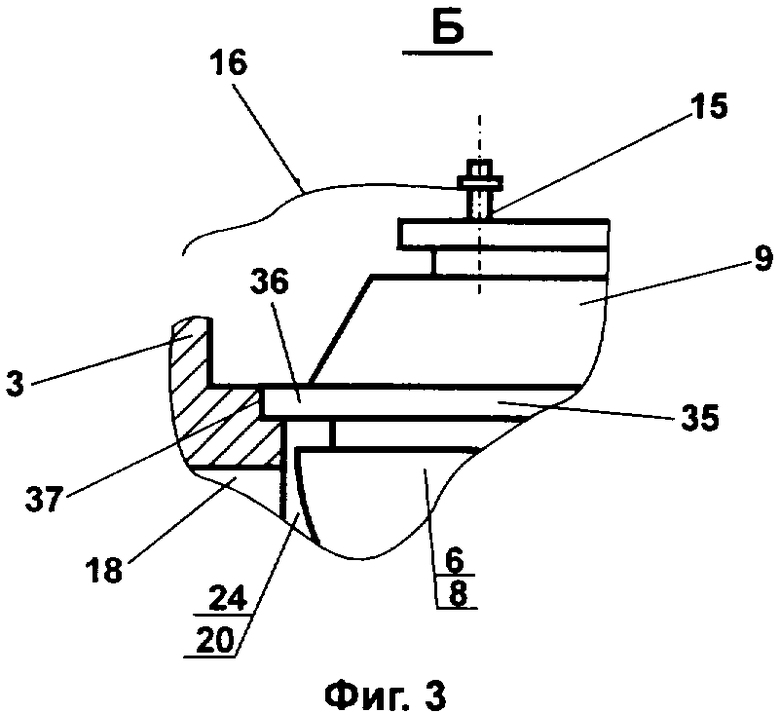
на фиг.3 - выносной элемент Б (см. фиг.1), поясняющий особенности монтажа ТВГ;
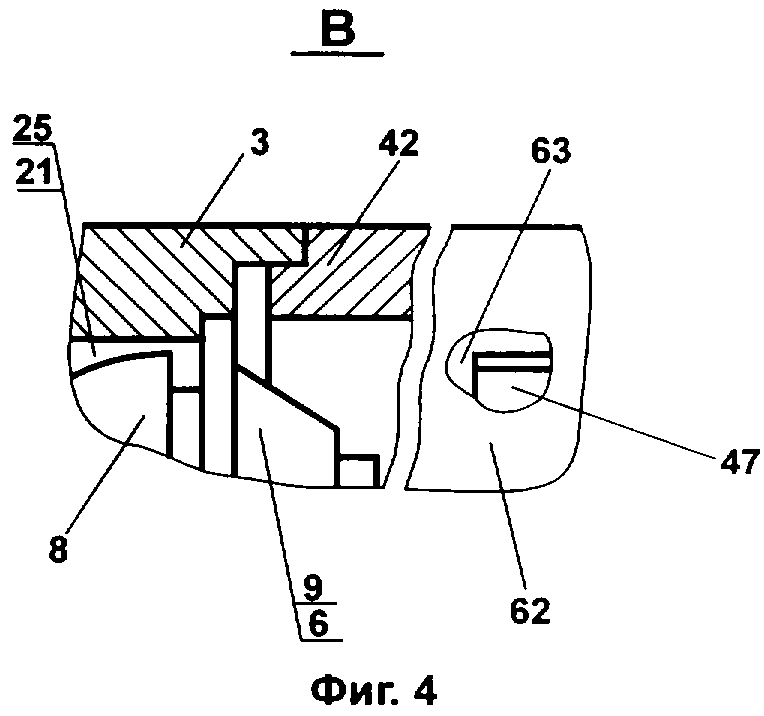
на фиг.4 - выносной элемент В, поясняющий особенности присоединения защитного хвостовика к торцу корпуса гироскопического блока со стороны продольно ориентированного ТВГ;
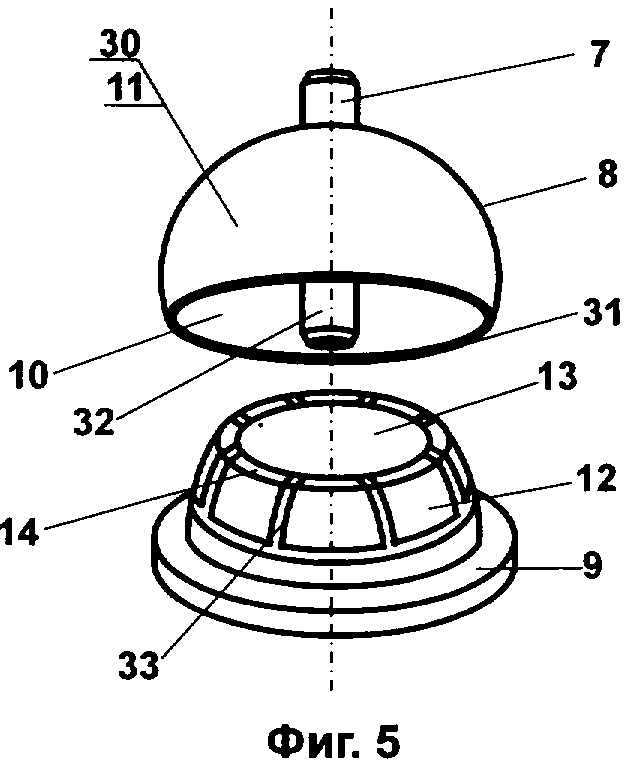
на фиг.5 - общий вид полусферического резонатора и электромеханической платы ТВГ в расстыкованном положении (аксонометрическая проекция);
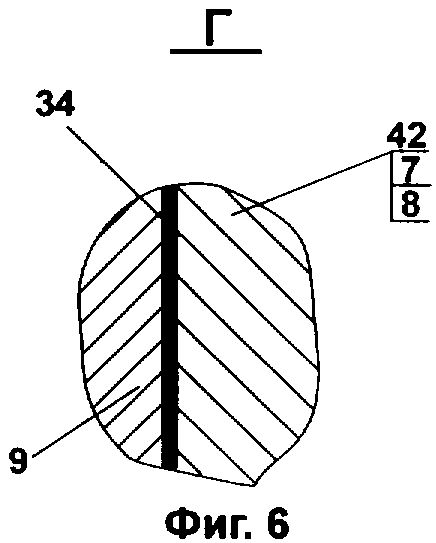
на фиг.6 - выносной элемент Г (см. фиг.1), поясняющий особенности жесткого сочленения полусферического резонатора и электромеханической платы ТВГ посредством клеевого соединения или методом пайки;
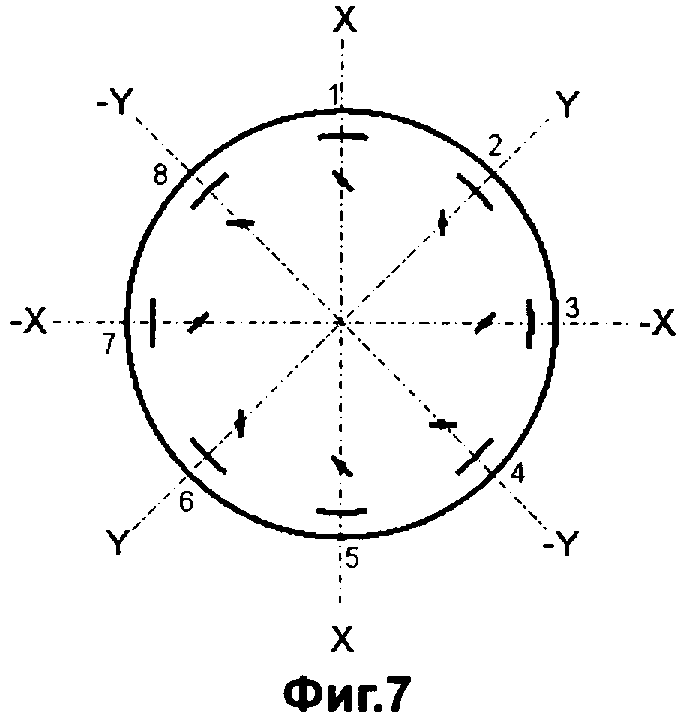
на фиг.7 - схема расположения электродов и осей ТВГ (1-8 - номера электродов; X, - X, Y, -Y - оси);
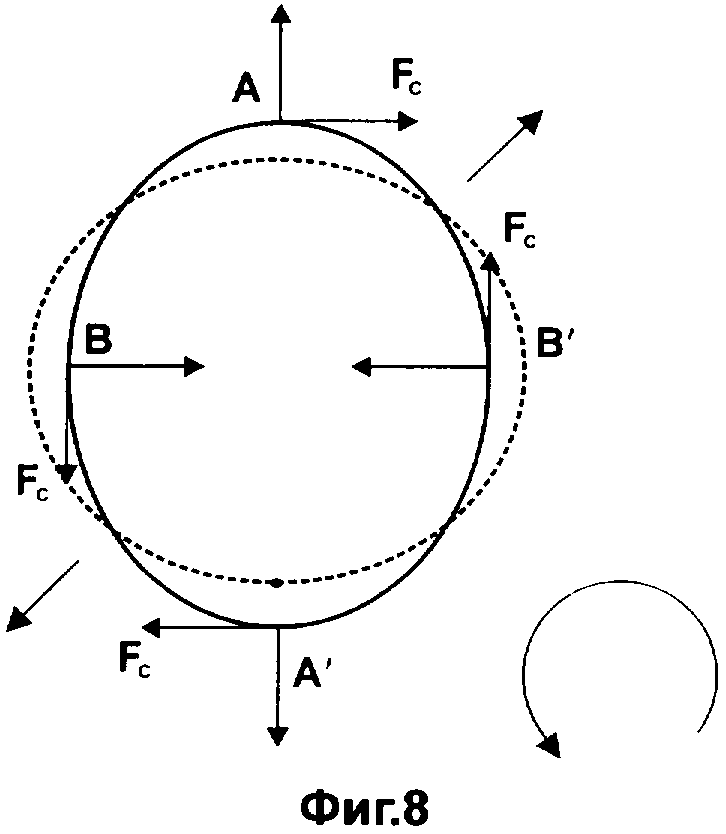
на фиг.8 - схема действия сил Кориолиса на вибрирующий полусферический резонатор ТВГ (А, А', В, В' - точки на кромке резонатора; Fc - Кориолисова сила;  - направление вращения,
- направление вращения,  - направление результирующей Кориолисовой силы;
- направление результирующей Кориолисовой силы;
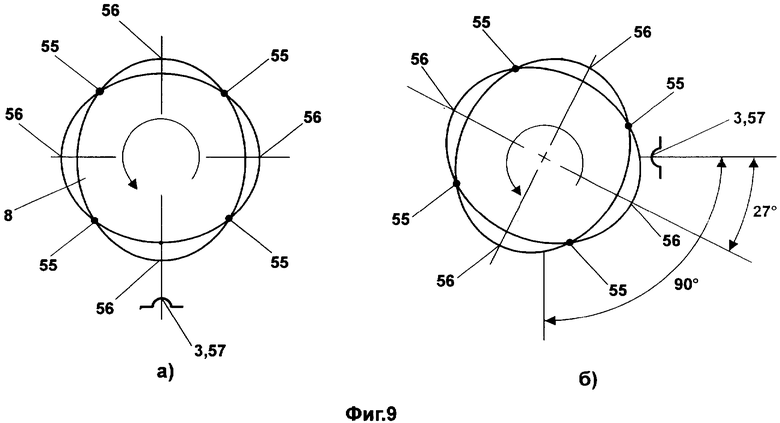
на фиг.9 - характер изменения ориентации волновой картины колебаний при повороте резонатора ТВГ: (а) - первоначальная волновая картина, (б) волновая картина после поворота корпуса, - направление вращения, 27° - угол прецессии волновой картины, 90° - угол поворота корпуса;
на фиг.10 - общий вид заявляемого трехосного гироскопа с присоединенным к его корпусу установочно-присоединительным элементом, выполненным в виде съемной переходной втулки;
на фиг.11 - общий вид заявляемого трехосного гироскопического блока, пристыкованного к шасси инклинометра с расположенным в нем блоком акселерометров инерциальной навигационной системы;
на фиг.12 - поперечный разрез Д-Д (см. фиг.11) заявляемого трехосного гироскопического блока по месту расположения съемной переходной втулки;
на фиг.13 - вариант использования инклинометрического оборудования (инерциальной навигационной системы) в составе буровой колонны;
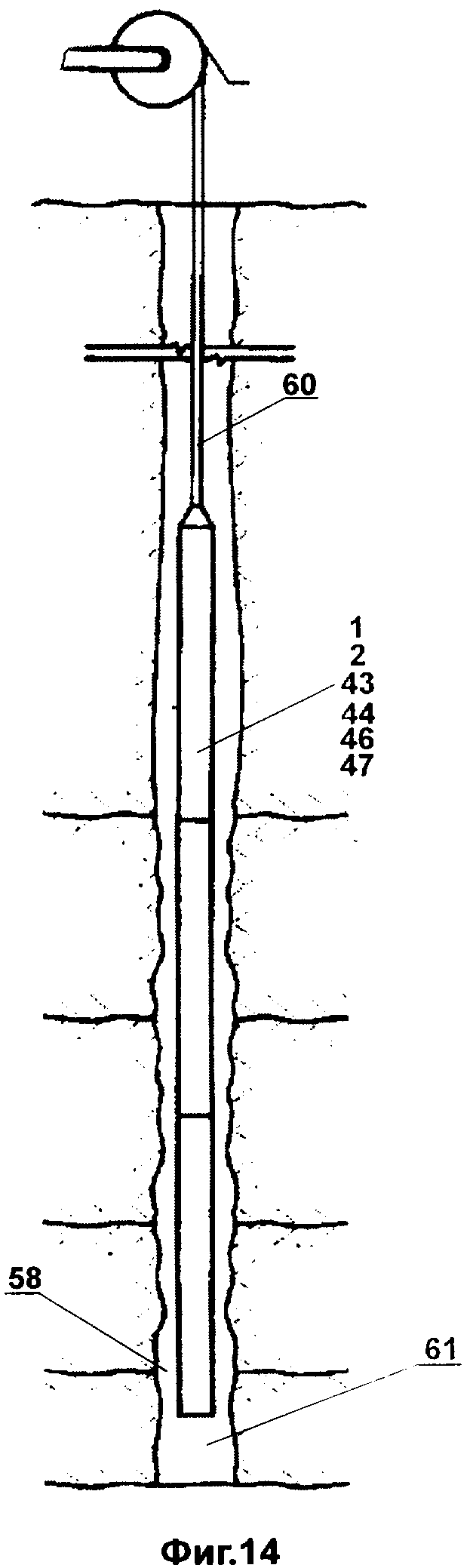
на фиг.14 - общий вид автономного скважинного инклинометра, опущенного в забой.
Конструктивно заявленный трехосный гироскопический блок 1 бортовой инерциальной навигационной системы 2 содержит (см. фиг.1-7, 10-12) вакуумируемый, с обеспечением обезгаживания посредством поглощения, металлический корпус 3 цилиндрической конфигурации с соответсвующими установочно-присоединительными элементами 4, 5 и три герметично встроенных в него с последовательным расположением один за другим непараллельной и, в частности, ортогональной ориентацией по отношению друг к другу ТВГ 6, каждый из которых выполнен из двух изготовленных из кварцевого стекла и скрепленных между собой деталей 32, 33, одной из которых является снабженный центральным держателем 7 стержневого типа полусферический резонатор 8, а другой - располагаемая с зазором внутри последнего электромеханическая плата 9, примыкающий к внутренней поверхности 10 полусферы 11, фрагмент которой сформирован в виде шарового сегмента 12 с центральной выборкой 13 и соответствующими электродами 14 круглой, трапециевидной или иной формы, используемыми для возбуждения резонатора и регистрации его колебаний, и снабжен соответствующими гермовыводами 15 и токоподводами 16 для присоединения к обслуживающему гироскопы блоку электроники 17.
Вакуумируемый корпус 3 гироскопического блока 1 выполнен в виде односекционной монолитной детали стержневого типа. В теле корпуса 3 сформированы четыре последовательно расположенных одно за другим и сообщенных между собой общим вакуумным каналом 18 посадочных гнезда 19-22.
Три из указанных гнезд 19-21 непараллельно и, в частности, ортогонально ориентированы по отношению друг к другу и предназначены для размещения в них ТВГ 6. Четвертое гнездо 22 предназначено под единый для всех вакуумируемых полостей 23-26 корпуса 3 газопоглотитель 27 с поглощающей способностью, рассчитанной на весь срок эксплуатации гироскопического блока. При этом одной из торцовых сторон вакуумируемый объем 28 корпуса 3 ограничен телом продольного гироскопа 6, а другой - используемым для откачки воздуха и обезгаживания его ниппелем 29.
Благодаря заложенным в основу металлоконструкции корпуса заявляемого гироскопического блока техническим решениям она отличается от вышеупомянутых известных аналогов и прототипа глубокой упорядоченностью и рациональностью как в своем построении, так и концептуальном плане. Выполнение корпуса односекционным позволяет объединить возлагаемые на него функции крепления размещаемых в нем элементов блока и вакуумирования монтажных полостей. Простота конструктивного исполнения корпуса придает ему высокую технологичность и обеспечивает необходимое удобство монтажа и обслуживания встраиваемых элементов.
В силовом плане конструкция корпуса заявляемого блока обладает необходимой прочностью и жесткостью при минимально возможных габаритах. Общая длина его с учетом размеров установочно-присоединительных элементов гораздо меньше, чем у известных аналогов и прототипа, а диаметр не превышает 40 мм. Указанная минимизация размеров обеспечивает корпусу достаточно высокое весовое совершенство.
Наружная и торцевая поверхности 30, 31 полусфер 11 резонаторов 8 каждого из гироскопов 6 металлизированы для обеспечения рабочих емкостей между резонаторами и соответствующими электромеханическими платами и для управления резонаторами.
Резонаторы 8 и электромеханические платы 9 каждого из гироскопов 6 жестко сочленены друг с другом напрямую посредством соответствующего клеевого соединения или методом пайки 34, без использования каких-либо промежуточных деталей. Указанная особенность исполнения обеспечивает максимально возможную степень минимизации соответствующих размеров собранных таким образом узлов. При этом жесткое соединение в данном случае значительно повышает предел необратимых деформаций конструкции при воздействии на нее в процессе эксплуатации соответствующих рабочих нагрузок.
В сочлененном виде обе из вышеперечисленных деталей 8 и 9, через прикрепленные к ним металлические стыковочные крышки 35, снабженные развитыми кольцевидными буртиками 36, подвешивают на опорно-установочных поверхностях 37 посадочных гнезд 19-21 корпуса 3, с ориентацией полусферами 11 резонаторов 8 в сторону донной части 38 гнезд и жестким закреплением и герметизацией по месту монтажа посредством сварки. При этом поперечно ориентированные гироскопы 6 оказываются заглубленными в гнезда 19, 20 заподлицо с внешними обводами 39 цилиндрической поверхности 40 корпуса 3, а продольно ориентированный - экранирован снаружи присоединяемым к торцевой части 41 последнего защитным металлическим хвостовиком 42.
С таким же заглублением, как и поперечно ориентированные гироскопы 6, в посадочное гнездо 22 корпуса 3 установлен и газопоглотитель 27, также закрепляемый по месту монтажа с обеспечением необходимой герметизации посредством сварки. Вышеуказанные особенности конструкции и, в первую очередь, миниатюрность исполнения ТВГ и газопоглотителей обеспечивают безупречность компоновки размещенных в корпусе блока его составных частей, компактность и высокое совершенство изделия. С технологической точки зрения данная компоновка не вызывает каких-либо затруднений. Монтаж сопрягаемых частей предельно прост, поскольку для этого предусмотрены соответствующие достаточно эффективные элементы их базирования и ориентации.
Заглубление и экранировка встраиваемых в корпус частей блока исключает выступание их за внешние обводы последнего и вероятность случайного механического повреждения как на этапе изготовления, так и при установке на борт 43 объекта 44 (например, инклинометра).
Используемые для соединения электродов плат 9 гироскопов 6 с обслуживающим их блоком электроники 17 гермовыводы 15 размещены на их стыковочных крышках 35. Указанная конструктивная особенность обеспечивает свободный доступ к ним и удобство монтажа токопроводов 16.
Для прокладки токопроводов 16 в корпусе 3 гироскопического блока 6 сформированы монтажные пазы 45. При этом прокладка указанных токопроводов 16 выполнена по кратчайшим трассам с обеспечением дискретного закрепления их в монтажных пазах 45 при помощи соответствующей мастики или герметика. Данное техническое решение позволяет упорядочить пространственное расположение токоподводов с исключением петель провисания большой величины.
Установочно-присоединительные элементы 4, 5 заявленного гироскопического блока 1, обеспечивающие механическое сопряжение его корпуса 3 с другими частями, например блоком 46 акселерометров 47 инерциальной навигационной системы 2 и бортом 43 объекта 44, и в частности шасси, скважинного инклинометра, на котором она размещается, выполнены на одном из концов корпуса в виде сформированного в теле его защитного хвостовика 42 резьбового присоединителя, а с противоположной стороны - в виде прикрепленной к корпусу посредством болтового соединения 48 съемной переходной втулки, снабженной соответствующими соосно расположенными посадочными поверхностями 49, 50, стыковочными отверстиями 51, элементами позиционирования 52 сопрягаемых частей относительно друг друга и встроенным в нее осевым электрическим присоединителем 53.
Резьбовой присоединитель 4 предназначен для соединения заявляемого гироскопического блока 1 с амортизатором 54 инклинометра 44, а съемная переходная втулка 5 - с шасси 43 последнего и блоком 46 акселерометров 47 инерциальной навигационной системы 2.
Конструкция указанных установочно-присоединительных элементов предельно проста и позволяет быстро устанавливать заявленный гироскопический блок на рабочее место, с обеспечением необходимой точности позиционирования, и демонтировать его при необходимости, например в случае отказа, на предмет замены новым. В принципе, конструктивное исполнение указанных установочно-присоединительных элементов может быть и иным.
Входящие в состав заявляемого блока ТВГ Кориолисова типа, поскольку в данном случае входная угловая скорость W взаимодействует с вектором линейной скорости V, вызывая тем самым Кориолисову силу F=2W×V. Для оболочки вектор скорости V - это, собственно, линейная скорость частиц резонатора, совершающих колебательное движение. Кориолисова сила F действует на эти частицы и вынуждает формируемую осциллирующими частицами вибрационную картину прецессировать.
В твердотельном волновом гироскопе инерциальным датчиком служит кольцевой полусферический резонатор, который, будучи введенным в режим вибрации, обеспечивает наличие переменной линейной скорости V с частотой, равной резонансной. Из нескольких возможных мод в качестве рабочей обычно выбирают эллиптическую (n=2) с частотой собственных колебаний оболочки. Когда резонатор вращается вокруг оси симметрии относительно инерциального пространства, то каждый индивидуально резонирующий элемент массы стоячей волны дает дополнительную силу, вызывающую смещение волны относительно резонатора. Регистрация углового смещения дает возможность определить угловое движение резонатора и, тем самым, использовать его как чувствительный элемент. Причина этого углового смещения может быть качественно объяснена детальным рассмотрением эффекта Кориолисовых сил, действующих на стенки резонатора при его вращении. Рассмотрим движение точки А, находящейся на кромке резонатора, как показано на фиг.8. Если резонатор вращается вокруг центральной оси с постоянной угловой скоростью, то в тангенциальном направлении в этой точке будет действовать Кориолисова сила Fc. Подобным образом на противоположной стороне резонатора появится эквивалентная Кориолисова сила в тангенциальном направлении в точке А', но в противоположном направлении. Таким образом, две Кориолисовы силы в сумме создадут пару (момент) вокруг оси резонатора.
В точках В и В' радиальная составляющая скорости вращения кромки резонатора будет эквивалентна, но противоположна точкам А и А', поэтому Кориолисовы силы, создаваемые в этих точках, будут эквивалентны и противоположны силам в точках А и А' и создадут момент противоположного направления. Сумма этих двух пар сил даст составляющую силы, действующую на кромку резонатора в радиальном направлении в точке 45° в направлении действующей силы, т.е. возникнет компонента вибрации в точке 45° по отношению к первоначальной. Величина этой компоненты пропорциональна воздействующей угловой скорости. Векторная сумма (добавка) этой компоненты с первоначальной вибрационной картиной даст малое угловое смещение стоячей волны и, как следствие, смещение положений узлов на поверхности резонатора.
Когда резонатор не вращается, радиальная составляющая движения узлов равна нулю, поэтому напряжение в датчиках отсутствует. Когда резонатор вращается, датчик регистрирует радиальную составляющую движения, производимую Кориолисовыми силами, и величина амплитуды колебаний пропорциональна действующей угловой скорости основания.
В первую половину периода колебаний резонатор деформируется в максимально эллиптическую форму, потом возвращается в сферическую. В течение следующей половины периода колебаний аналогичная деформация возникает под углом 90°. Результат таких колебаний - стоячая волна с четырьмя узлами 55 и четырьмя пучностями 56 (см. фиг.9). Как показано на фиг.9, стоячая волна ориентирована пучностью по направлению метки 57 на основании (корпусе 3). Когда основание поворачивается на 90°, пучности прецессируют на угол, составляющий 0,3 от угла поворота основания и в действительности равный 27°. Таким образом, стоячая волна отстает от резонатора на 70% от угла поворота основания. Эта прецессия и есть основной эффект, который используется в ТВГ.
Общее управление твердотельными волновыми гироскопами заявленного блока, получение с них необходимой информации и обмен ею с внешним управляющим комплексом забойной телеметрической системы осуществляется бортовым блоком обслуживающей указанные гироскопы электроники (не показан), сформированной на основе микропроцессорной техники с соответствующим программным обеспечением.
При этом запуск гироскопов в рабочий режим осуществляется посредством соответствующего возбуждения их резонаторов путем подачи необходимых силовых сигналов (управляющих напряжений) на электроды X, -X и Y, -Y электромеханической платы, оси которых сдвинуты по отношению друг к другу на 45° (см. фиг.7). Съем информации (ориентации и амплитуды колебаний резонатора) осуществляется с тех же электродов, поскольку указанные операции (съема и управления) разнесены во времени.
Определение ориентации скважины 58 основано на измерении проекций векторов угловой скорости вращения Земли и ускорения силы тяжести на оси чувствительности соответствующих датчиков (ТВГ и акселерометров) инклинометра в периоды технологических остановок буровой колонны 59.
С помощью заявленного трехосного гироскопического блока измерения параметров скважины могут производиться двумя различными методами:
1) методом, при котором гироскопический блок 1 входит в состав бортовой инерциальной навигационной системы 2 инклинометра 44, являющегося одним из функциональных звеньев буровой колонны 59, и позволяет, не нарушая процесса бурения, определять угловую ориентацию скважины 58 (см. фиг.13);
2) классическим методом, при котором информация с гироскопического блока 1, входящего в состав бортовой инерциальной системы 2 скважинного инклинометра 44, считывается во время спуска последнего на кабеле 60 в забой 61 и подъема оттуда (см. фиг.14).
Указанные методы отличаются друг от друга, прежде всего, по способу обработки информации. В первом случае информация с гироскопов и блока и других инерциальных датчиков, например акселерометров, считывается и обрабатывается непрерывно, что позволяет видеть полную картину траектории скважины в реальном масштабе времени. При использовании второго метода информация, как правило, сохраняется на магнитном носителе, который после измерений извлекается вместе с инклинометром на поверхность. Таким образом, измерения данным методом носят периодический характер.
Невакуумируемая часть 62 металлического корпуса 3 заявляемого гироскопического блока 1 может быть выполнена как с дополнительно сформированными в ее теле тремя резервными полостями 63 для размещения в них акселерометров 47 инерциальной навигационной системы 2, так и без них.
Резервные полости 63, так же как и посадочные гнезда 19-21 корпуса 3 под ТВГ 6, последовательно расположены и непараллельно, в частности ортогонально, ориентированы по отношению друг к другу. В первом случае обеспечивается большая компактность и удобство монтажа указанной аппаратуры 6, 47 навигационной системы, а также точность ее взаимного позиционирования. При размещении указанной аппаратуры в едином корпусе эта задача решается гораздо проще.
Второй случай позволяет использовать в эксплуатации существующие забойные телеметрические системы с заменой в последних устаревшей навигационной аппаратуры на заявляемый трехосный гироскопический блок. Поскольку при этом вышеупомянутые акселерометры имеются в составе указанных забойных телеметрических систем, в конструкции заявляемого гироскопического блока они не устанавливаются.
В заявляемом трехосном гироскопическом блоке использованы широко применяемые в навигационном приборостроении современные высококачественные отечественные материалы и комплектующие элементы, не уступающие по техническим характеристикам зарубежным, рациональные технические решения и прогрессивная технология изготовления.
Одним из уникальных свойств заявляемого гироскопического блока является способность использованных в его составе твердотельных волновых гироскопов некоторое время сохранять колебания резонатора без подпитки извне. В течение этого времени (20-30 с) форма волны практически не меняется, и, следовательно, гироскопический прибор сохраняет инерциальную информацию при случайном кратковременном прерывании электропитания.
Конструкция заявляемого трехосного гироскопического блока предельно проста и обладает высокими потребительскими качествами. Миниатюрность исполнения, обтекаемые формы, стройность и изящность линий, визуальная упорядоченность компоновки заявляемого гироскопического блока свидетельствуют о высокой степени совершенства и качества изделия.
К основным достоинствам заявляемого гироскопического блока, несомненно, следует отнести:
- рациональность его металлоконструкции, силовой схемы и компоновки;
- миниатюрность исполнения;
- высокую технологичность, надежность работы в экстремальных условиях и точностные характеристики;
- малое время подготовки к работе;
- удобство монтажа на объекте и обслуживания;
- чрезвычайно широкую область использования и умеренную стоимость.
Заложенные в него схемно-конструкторские, технологические и другие технические решения в целом позволяют поднять уровень отечественной гироскопической аппаратуры данного назначения по ее функциональным возможностям и технико-эксплуатационным и экономическим показателям до современного и на этой основе значительно повысить конкурентоспособность оборудования рассматриваемого класса.
С учетом вышеизложенного заявляемый трехосный гироскопический блок может быть многократно воспроизведен по разработанной на него документации в условиях серийного производства на специализированных предприятиях, располагающих необходимым для этого оборудованием, технологиями, персоналом и соответствующей нормативно-разрешающей базой.
В настоящее время на заявленный трехосный гироскопический блок в ООО «ПрецЭл» (г.Миасс) полностью разработана соответствующая конструкторская документация, по которой изготовлен и испытан в лабораторных условиях действующий макет, имеющий следующие технические характеристики:
Эффективность заложенных в конструкцию заявляемого трехосного гироскопического блока решений, а также возможность получения при осуществлении изобретения вышеупомянутого технического результата, заключающегося в устранении перечисленных выше недостатков известных аналогов и прототипа, а именно улучшении его технико-эксплутационных качеств, позволяющих достигнуть современного технического уровня, высокой конкурентоспособности навигационного оборудования такого класса и сокращении сроков и стоимости создания, подтверждены соответствующими расчетами и результатами испытаний.
Комплексные испытаний заявляемого трехосного гироскопического блока в составе бортовой инерциальной навигационной системы запланированы на следующий год. Решение о серийном производстве заявляемого гироскопического блока будет принято после завершения указанных испытаний.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАЛОГАБАРИТНЫЙ ТВЕРДОТЕЛЫЙ ВОЛНОВОЙ ГИРОСКОП | 2007 |
|
RU2362121C2 |
| ТВЕРДОТЕЛЬНЫЙ ВОЛНОВОЙ ГИРОСКОП | 2013 |
|
RU2541711C1 |
| Способ непрерывного съёма навигационной информации с кориолисова вибрационного гироскопа | 2016 |
|
RU2662456C2 |
| ОСЕСИММЕТРИЧНЫЙ КОРИОЛИСОВЫЙ ВИБРАЦИОННЫЙ ГИРОСКОП (ВАРИАНТЫ) | 2010 |
|
RU2476824C2 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ТВЕРДОТЕЛЬНОГО ВОЛНОВОГО ГИРОСКОПА (ВАРИАНТЫ) | 2012 |
|
RU2521783C2 |
| Способ компенсации погрешности от углового ускорения основания для кориолисова вибрационного гироскопа с непрерывным съёмом навигационной информации | 2016 |
|
RU2659097C2 |
| ВОЛНОВОЙ ТВЕРДОТЕЛЬНЫЙ ГИРОСКОП | 2022 |
|
RU2793299C1 |
| Датчик угла на базе волнового твердотельного гироскопа с металлическим резонатором | 2024 |
|
RU2832852C1 |
| УСТРОЙСТВО ПОДВЕСА БОКА ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТОВ ИНЕРЦИАЛЬНО-НАВИГАЦИОННОЙ СИСТЕМЫ НА БАЗЕ ТВЕРДОТЕЛЬНЫХ ВОЛОКОННЫХ ГИРОСКОПОВ | 2013 |
|
RU2550160C2 |
| Способ контроля физических параметров резонатора твердотельного волнового гироскопа | 2021 |
|
RU2783189C1 |
Изобретение относится к области навигационной техники, а именно к гироскопической аппаратуре миниатюрного исполнения, для контроля ориентации скважин в нефтегазовой и других отраслях хозяйства. Техническим результатом изобретения является улучшение технико-эксплутационных качеств, снижение стоимости и сокращение сроков создания такой аппаратуры. Гироскопический блок содержит вакуумируемый корпус с тремя размещенными в нем твердотельными волновыми гироскопами (ТВГ). Корпус гироскопического блока выполнен в виде односекционной монолитной детали стержневого типа. Каждый из твердотельных волновых гироскопов выполнен двухдетальным, из жестко скрепленных между собой посредством клеевого соединения или методом пайки полусферического резонатора и размещенной внутри него платы с металлизированными электродами для возбуждения резонатора и регистрации его колебаний, изготовленных из кварцевого стекла. Невакуумируемая часть корпуса может быть выполнена с тремя дополнительными резервными полостями для размещения в них акселерометров навигационной системы либо без них. 3 з.п. ф-лы, 14 ил.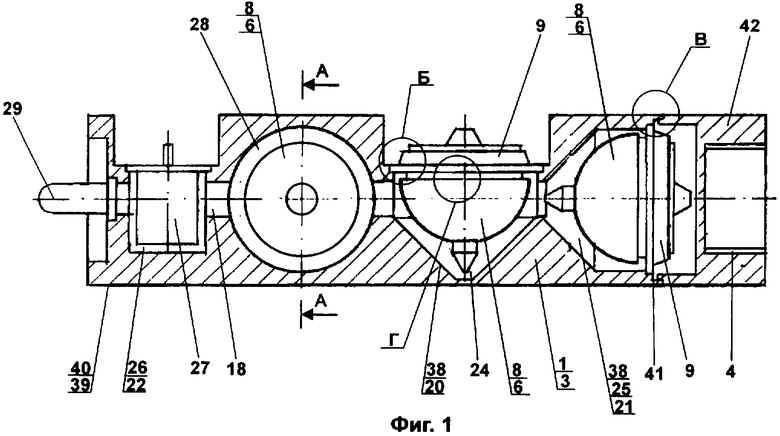
| US 6453239 B1, 17.09.2002 | |||
| RU 2000544 C1, 07.09.1993 | |||
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1995 |
|
RU2095563C1 |
| ГИРОСКОПИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2169903C1 |
| КОМПЛЕКС ИНКЛИНОМЕТРИЧЕСКОЙ СКВАЖИННОЙ АППАРАТУРЫ И СПОСОБ ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ СКВАЖИН | 2000 |
|
RU2193654C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЛОКАЛЬНЫХ СМЕЩЕНИЙ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ | 2001 |
|
RU2206871C2 |
| НАВИГАЦИОННО-ТОПОГРАФИЧЕСКИЙ ВНУТРИТРУБНЫЙ ИНСПЕКТИРУЮЩИЙ СНАРЯД | 2002 |
|
RU2207512C1 |
| US 5712427 A, 27.01.1998 | |||
| ДВУХВАННЫЙ СТАЛЕПЛАВИЛЬНЫЙ АГРЕГАТ | 1990 |
|
RU2009418C1 |
| Машина для формования железобетонных тонкостенных пространственных криволинейных покрытий сводов двойной кривизны | 1957 |
|
SU109830A1 |
| ИСАЧЕНКО В.Х | |||
| Инклинометрия скважин | |||
| - М.: Недра, 1987, с.79-83, 185-188. | |||

