ОБЛАСТЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Изобретение относится к электронным мобильным устройствам, таким как мобильные телефоны, и устройствам личной гигиены, таким как электробритвы. Изобретение более конкретно относится к электронному мобильному устройству, которое может быть переключено из первого режима работы во второй режим работы. Изобретение также относится к способу переключения электронного мобильного устройства из первого режима работы во второй режим работы и наоборот. Наконец, изобретение также относится к компьютерному программному продукту.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Для подачи питания электронным мобильным устройствам, таким как устройства мобильной связи, и устройствам личной гигиены, подобным электробритвам, используются перезаряжаемые аккумуляторы. Для экономии энергии современные электронные мобильные устройства автоматически переключаются в режим низкого энергопотребления, иногда называемый спящим режимом. Для пробуждения электронного мобильного устройства из спящего режима используются разные методики. В случае, когда электронное мобильное устройство содержит механический переключатель «включено-выключено», устройство может быть пробуждено при нажатии механического переключателя. В настоящее время этот способ используется большинством электронных мобильных устройств. Общеизвестным примером является смартфон.
При использовании механического переключателя устройство не будет пробуждаться до тех пор, пока пользователь не нажмет переключатель. Это означает, что устройство неспособно реагировать на действие поднятия (перемещения) устройства. Принимая во внимание то, что действие поднятия устройства как правило означает, что пользователь хочет использовать его, это можно считать недостатком.
Для преодоления этой проблемы электронное мобильное устройство может иметь встроенный в него датчик механического движения. Тогда устройство будет пробуждаться, когда датчик механического движения генерирует ряд импульсов, которые отвечают предварительно заданному требованию пробуждения, например, минимальной/максимальной продолжительности и частоте. С помощью этого подхода может быть достигнута функция пробуждение-при-поднятии. В этом случае можно пробуждать устройство при его поднятии. Однако, устройство также будет подвержено пробуждению из-за произвольных вибраций и ударов, что нежелательно. Существующее решение этой проблемы состоит в отключении датчика движения на время, когда устройство пробуждалось предварительно заданное число раз без вмешательства пользователя. Однако, это означает, что устройство будет полностью не реагирующим на движение в течение этого времени. Также, для того, чтобы гарантировать то, что устройство остается работающим при всех обстоятельствах, требуется, чтобы был реализован альтернативный способ для пробуждения/активации устройства, например, добавление механического переключателя. Это приводит к дополнительным затратам, сложности и менее интуитивной работе устройства.
В качестве альтернативы, электронное мобильное устройство может использовать емкостной сенсорный датчик. Тогда мобильное устройство может пробуждаться, когда пользователь касается, например, экрана или окна устройства, содержащего емкостной сенсорный датчик. Подобно вышеприведенной реализации в виде использования механического переключателя, устройство не будет пробуждаться до тех пор, пока пользователь не коснется датчика. Это означает, что устройство не способно реагировать на действие поднятия устройства.
Использование акселерометра внутри электронного мобильного устройства является дополнительной альтернативой. Устройство будет пробуждаться, когда измеренное ускорение относительно по меньшей мере одной из осей акселерометра превышает порог (например, при встряхивании, повороте или поднятии устройства с достаточной скоростью) или когда устройство удерживается в конкретной ориентации. Однако, при пробуждении мобильного устройства, основанном на превышающем определенный порог ускорении, устройство не всегда будет пробуждаться, когда необходимо. Например, когда устройство поднимают очень (слишком) медленно или когда устройство не удерживают в корректной ориентации.
Патентная заявка WO 2010/042661 раскрывает способ и систему для пробуждения электронного мобильного устройства вследствие движения. Устройство содержит акселерометр, выполненный с возможностью регистрации движения устройства. Вычислительная логика анализирует данные движения, чтобы определить, указывают ли данные движения реальное движение. Если так, то устройство пробуждается. Устройство содержит логику длительного усреднения, выполненную с возможностью вычисления длительного усреднения ускорений в течение периода выборки по так называемой доминирующей оси. Период выборки может составлять 5 минут. Логика длительного усреднения складывает выборочные данные движения со значением длительного усреднения, чтобы создать обновленное значение длительного усреднения ускорений. Вычислительная логика сравнивает доминирующую ось бездействия с текущей доминирующей осью. Если доминирующая ось изменилась, тогда изменилась ориентация устройства, и это гарантирует пробуждение устройства. Если доминирующая ось по существу точно такая же, как доминирующая ось бездействия, тогда вычислительная логика определяет, изменилось ли значение длительного усреднения по доминирующей оси на более чем пороговое значение. Если значение длительного усреднения изменилось более чем на пороговое значение, устройство пробуждается.
Недостаток вышеописанного электронного мобильного устройства состоит в том, что ускорения очень чувствительны к ударам и другим отклонениям. Таким образом, необходимо компенсировать ложные сигналы. В электронном мобильном устройстве, известном из WO 2010/042661, эта компенсация выполняется при добавлении дополнительной логики, такой как логика коррекции ложного сигнала. Это увеличит сложность и стоимость устройства. Кроме того, использование длительного усреднения ускорений требует дополнительного аппаратного обеспечения, такого как память кольцевого буфера, и приводит к нежелательному дополнительному объему обработки данных.
WO 2009/068648 A1 раскрывает портативное электронное устройство с первой и второй зонами дисплея. Устройство имеет датчик ориентации, который измеряет пространственную ориентацию устройства, и контроллер дисплея, связанный с датчиком ориентации. Контроллер дисплея переключает первую и вторую зоны дисплея между первым и вторым состоянием дисплея, например, между включенным и выключенным состояниями, в зависимости от ориентации устройства, измеренной датчиком ориентации. Контроллер дисплея периодически вычисляет перемещение устройства как разность между текущей ориентацией, измеренной датчиком ориентации, и предыдущей ориентацией, сохраненной в памяти. Если вычисленное перемещение ниже порога, контроллер дисплея не переключает зоны дисплея. Если вычисленное перемещение превышает порог, контроллер дисплея делает вывод о том, переключать или нет зоны дисплея на основе анализа вычисленного перемещения. В случае переключения зон дисплея контроллером дисплея, предыдущая ориентация в памяти заменяется текущей ориентацией.
EP 2 703 778 A1 раскрывает портативное электронное устройство, содержащее экран дисплея, который переключается между альбомной и портретной ориентациями на основе ориентации устройства. Ориентация устройства определяется комбинацией разных датчиков, т.е. гироскопа, акселерометра и магнитометра. Гироскоп выполнен с возможностью восприятия окружной скорости устройства. Устройство определяет текущую ориентацию устройства на основе прошлой опорной ориентации, сохраненной во временном хранилище, и измерений окружной скорости гироскопа. Прошлая опорная ориентация вычисляется с использованием измерений акселерометра и магнитометра. Измерения акселерометра и магнитометра периодически собираются для того, чтобы обеспечивать скорректированную опорную ориентацию, из которой текущая ориентация устройства может быть вычислена на основе измерений гироскопа. Периодическая коррекция опорной ориентации выполняется для того, чтобы ограничить дрейф, вызываемый ошибками в измерениях гироскопа.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Цель изобретения состоит в предоставлении электронного мобильного устройства, которое способно автоматически переключаться между двумя режимами работы с использованием системы управления, которая менее чувствительная к ударам и которая использует меньшую мощность обработки в сравнении с устройствами уровня техники.
Для достижения этой цели, в соответствии с аспектом настоящего изобретения, предоставляется электронное мобильное устройство, содержащее блок управления режимом устройства, сконфигурированный и предназначенный для переключения мобильного устройства из первого режима работы во второй режим работы и наоборот, датчик ориентации, сконфигурированный и предназначенный для измерения текущей ориентации мобильного устройства, и процессор. Процессор сконфигурирован и выполнен таким образом, что во время работы мобильного устройства процессор:
- принимает текущую ориентацию от датчика ориентации и сохраняет принятую текущую ориентацию в качестве опорной ориентации мобильного устройства,
- периодически принимает текущую ориентацию от датчика ориентации, периодически вычисляет дифференциальный угол между текущей ориентацией и сохраненной опорной ориентацией и периодически сравнивает дифференциальный угол с предварительно заданным угловым пороговым значением, и
- выдает команду блоку управления режимом устройства на переключение мобильного устройства из первого режима работы во второй режим работы, если дифференциальный угол превышает предварительно заданное угловое пороговое значение,
при этом частота упомянутых периодического приема текущей ориентации, периодического вычисления и периодического сравнения дифференциального угла находится в диапазоне от 5 до 15 Гц, и при этом процессор сконфигурирован и выполнен таким образом, что во время работы мобильного устройства процессор периодически принимает текущую ориентацию от датчика ориентации и периодически сохраняет принятую текущую ориентацию в качестве опорной ориентации с частотой в диапазоне от 0,25 до 0,5 Гц.
При использовании ориентации устройства вместо ускорения отсутствует чувствительность к неисправности датчиков или внезапным ускорениям устройства при определении, требуется ли переключать устройство из первого во второй режим работы. Кроме того, так как частота упомянутых периодического приема и периодического сохранения текущей ориентации в качестве опорной ориентации ниже частоты упомянутых периодического приема текущей ориентации, периодического вычисления и периодического сравнения дифференциального угла, сохраненная опорная ориентация будет компенсированной в отношении медленных изменений ориентации устройства, которые могут происходить в первом режиме работы, так что устройство будет также надежно переключаться из первого во второй режим работы, если ориентация устройства медленно изменилась во время первого режима работы.
Было обнаружено, что эти значения для частоты обновления опорной ориентации дают хороший механизм взаимодействия пользователя с мобильным электронным устройством, таким как электробритва или устройство мобильной связи. Подъем этой частоты будет означать, что изменения угловой ориентации должны быть более быстрыми, чтобы быть обнаруженными. Понижение этой частоты будет означать, что устройство будет становиться более восприимчивым к медленным изменениям ориентации.
В настоящем изобретении выражение «периодически» используется для указания, что упомянутый прием текущей ориентации от датчика ориентации, упомянутое вычисление дифференциального угла между текущей ориентацией и сохраненной опорной ориентацией и упомянутое сравнение дифференциального угла с предварительно заданным угловым пороговым значением выполняются с предварительно заданной частотой, и для указания, что упомянутый прием текущей ориентации от датчика ориентации и упомянутое сохранение принятой текущей ориентации в качестве опорной ориентации также выполняются с предварительно заданной частотой. Упомянутые частоты могут быть фиксированными частотами, но этого не требуется. Крайне важно, что частоты являются предварительно заданными, т.е. частоты заданы, например, в качестве параметров работы, запрограммированных в процессоре.
В варианте осуществления первый режим работы является режимом низкого энергопотребления, а второй режим работы является режимом высокого энергопотребления.
Пользователь может пробуждать электронное мобильное устройство в соответствии с изобретением при простом его поднятии. Отсутствует необходимость в нажатии какой-либо кнопки или касания сенсорного экрана. Поскольку измеренная текущая ориентация относительно сохраненной опорной ориентации обычно меняется по существу всякий раз, когда устройство подхватывается, датчик ориентации будет измерять меняющуюся ориентацию. Вычисляется дифференциальный угол между измеренной текущей ориентацией и сохраненной опорной ориентацией. Когда дифференциальный угол превышает предварительно заданное угловое пороговое значение, процессор делает вывод о том, что устройство поднимают и что пользователь желает использовать устройство. Ранее сохраненная ориентация называется опорной ориентацией. Измеренная текущая ориентация периодически сохраняется в качестве новой опорной ориентации с такой частотой, что оптимизируется механизм взаимодействия с пользователем. Частота выбирается таким образом, что устройство не будет пробуждаться, когда происходят только небольшие изменения ориентации во время медленных перемещений устройства.
Периодическое сохранение новой опорной ориентации также гарантирует, что опорная ориентация следует изменениям ориентации, когда устройство используется в режиме высокого энергопотребления. Если бы это периодическое сохранение не выполнялось, устройство возможно пробуждалось бы немедленно по переходу в спящий режим в зависимости от последней измеренной опорной ориентации, сравненной с текущей ориентацией.
В варианте осуществления процессор сконфигурирован и выполнен таким образом, что во время работы мобильного устройства процессор сохраняет принятую текущую ориентацию в качестве опорной ориентации, когда мобильное устройство переключается из первого режима работы во второй режим работы. Таким образом, при переключении из первого во второй режим работы опорная ориентация обновляется независимо от частоты периодического обновления опорной ориентации, и опорная ориентация обновляется немедленно после того, как устройство переключается во второй режим работы.
В варианте осуществления процессор сконфигурирован и выполнен таким образом, что в режиме низкого энергопотребления мобильного устройства процессор различает спящий режим и режим поездки (перемещения), при этом, если мобильное устройство переключается из спящего режима в режим высокого энергопотребления предварительно заданное число раз во время предварительно заданного периода времени без регистрации какого-либо вмешательства пользователя, процессор выдает команду блоку управления режимом устройства на переключение мобильного устройства в режим поездки. В спящем режиме предварительно заданный угловой порог может быть меньше, чем в режиме поездки. Это обеспечивает преимущество, так как это предотвращает пробуждение устройства во время поездки.
Предварительно заданное угловое пороговое значение может находиться в диапазоне от 10 до 15 градусов или в диапазоне от 60 до 65 градусов. Возможны другие значения и диапазоны. Диапазон от 10 до 15 градусов очень подходит для пробуждения устройства, если устройство находится в спящем режиме. Диапазон от 60 до 65 градусов может быть использован для пробуждения устройства, но не так легко, как в спящем режиме. Например, если устройство находится в режиме поездки, предпочтителен диапазон от 60 до 65 градусов, так как он позволяет устройству оставаться в режиме низкого энергопотребления, даже когда оно перемещается из-за обычных перемещений чемодана, который используется для хранения устройства. В этом случае предпочтительна более высокий предварительно заданный угловой порог.
В варианте осуществления процессор выдает команду блоку управления режимом устройства на переключение мобильного устройства из режима поездки в спящий режим, если мобильное устройство находилось в режиме поездки предварительно заданное максимальное время поездки.
В варианте осуществления датчик ориентации выполнен в виде 3-осевого акселерометра. В другом варианте осуществления датчик ориентации выполнен в виде 3-осевого магнитометра. Отмечается, что может быть использован любой тип датчика, сконфигурированный для измерения ориентации устройства по отношению к гравитационному полю Земли.
В еще одном варианте осуществления датчик ориентации выполнен в виде 3-осевого гироскопа, сконфигурированного и предназначенного для измерения угловой скорости по 3 осям. В этом варианте осуществления процессор может быть сконфигурирован и выполнен таким образом, что во время работы мобильного устройства процессор переключает частоту выборки датчика ориентации между относительно низкой частотой выборки и относительно высокой частотой выборки, при этом процессор переключает частоту выборки на относительно низкую частоту выборки, если измеренная угловая скорость относительно по меньшей мере одной из 3 осей ниже минимального порога угловой скорости, и при этом процессор переключает частоту выборки на относительно высокую частоту выборки, если измеренная угловая скорость относительно по меньшей мере одной из 3 осей выше минимального порога угловой скорости.
Вышеупомянутое электронное мобильное устройство может быть устройством личной гигиены, устройством мобильной связи, мобильным мультимедийным проигрывателем, фаблетом или мобильным вычислительным устройством.
В соответствии с дополнительным аспектом изобретение предоставляет способ переключения электронного мобильного устройства из первого режима работы во второй режим работы и наоборот. Способ содержит:
- прием текущей ориентации мобильного устройства от датчика ориентации мобильного устройства и сохранение принятой текущей ориентации в качестве опорной ориентации устройства;
- периодический прием текущей ориентации от датчика ориентации, периодическое вычисление дифференциального угла между текущей ориентацией и сохраненной опорной ориентацией и периодическое сравнение дифференциального угла с предварительно заданным угловым пороговым значением; и
- переключение мобильного устройства из первого режима работы во второй режим работы, если дифференциальный угол превышает предварительно заданное угловое пороговое значение,
при этом частота упомянутых периодического приема текущей ориентации, периодического вычисления и периодического сравнения дифференциального угла находится в диапазоне от 5 до 15 Гц и при этом способ содержит периодический прием текущей ориентации мобильного устройства от датчика ориентации и периодическое сохранение текущей ориентации в качестве опорной ориентации с частотой в диапазоне от 0,25 до 0,5 Гц.
В соответствии с дополнительным аспектом изобретение предоставляет компьютерный программный продукт, содержащий команды для предписания процессорной системе выполнять способ в соответствии с изобретением, как упомянуто выше.
Дополнительные предпочтительные варианты осуществления электронного мобильного устройства и способа переключения электронного мобильного устройства в соответствии с изобретением приведены в прилагаемой формуле изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Эти и прочие аспекты изобретения будут очевидны из и дополнительно поясняются со ссылкой на варианты осуществления, описываемые путем примера в нижеследующем описании и со ссылкой на сопроводительные чертежи, на которых:
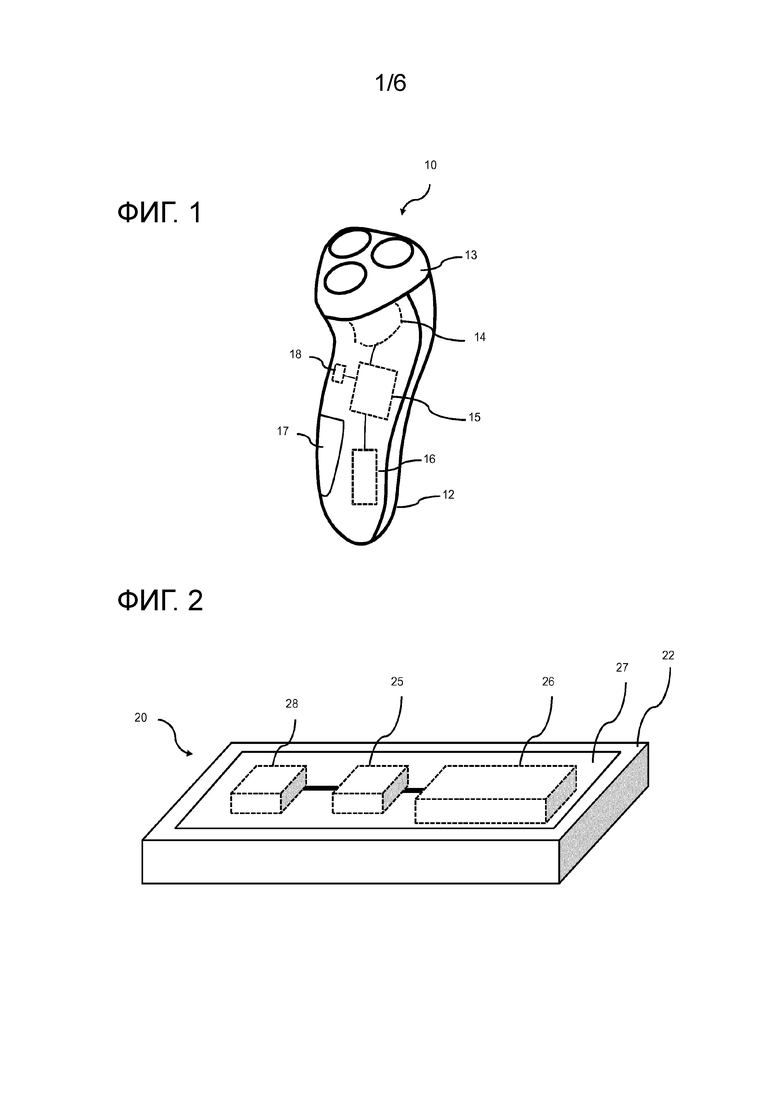
Фиг. 1 схематично показывает вид в перспективе варианта осуществления электронного мобильного устройства в соответствии с изобретением,
Фиг. 2 схематично показывает вид в перспективе дополнительного варианта осуществления электронного мобильного устройства в соответствии с изобретением,
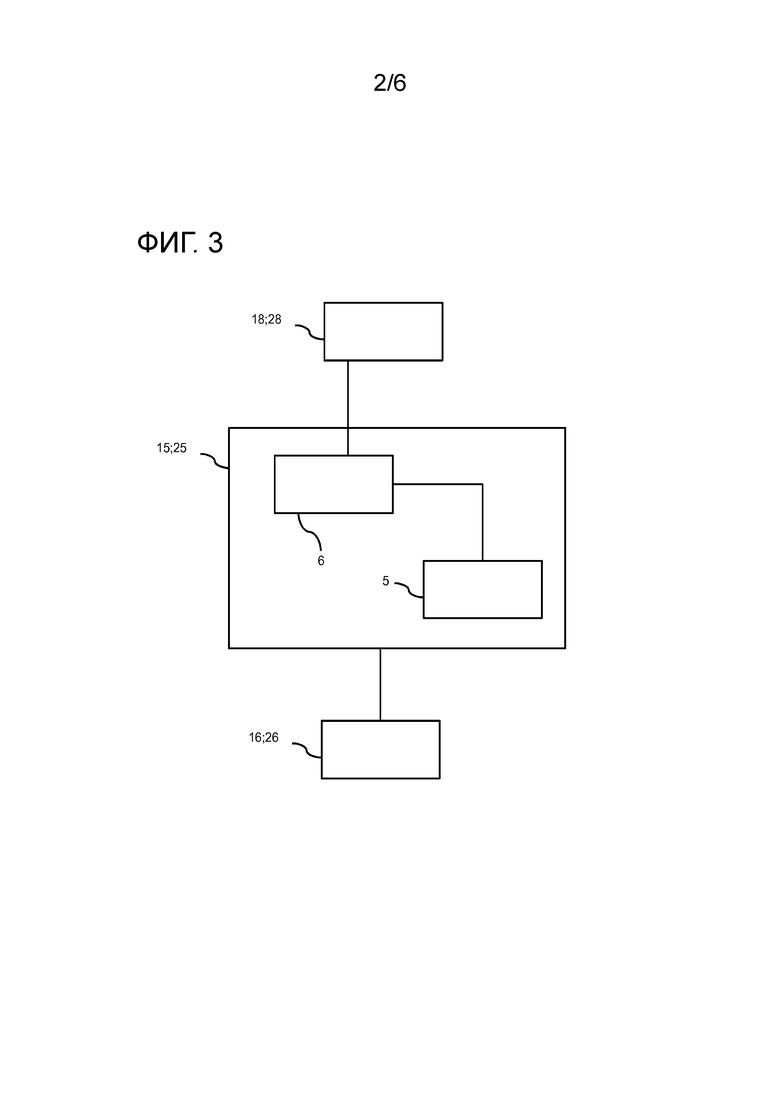
Фиг. 3 схематично показывает процессор, аккумулятор и датчик ориентации электронного мобильного устройства в соответствии с изобретением,
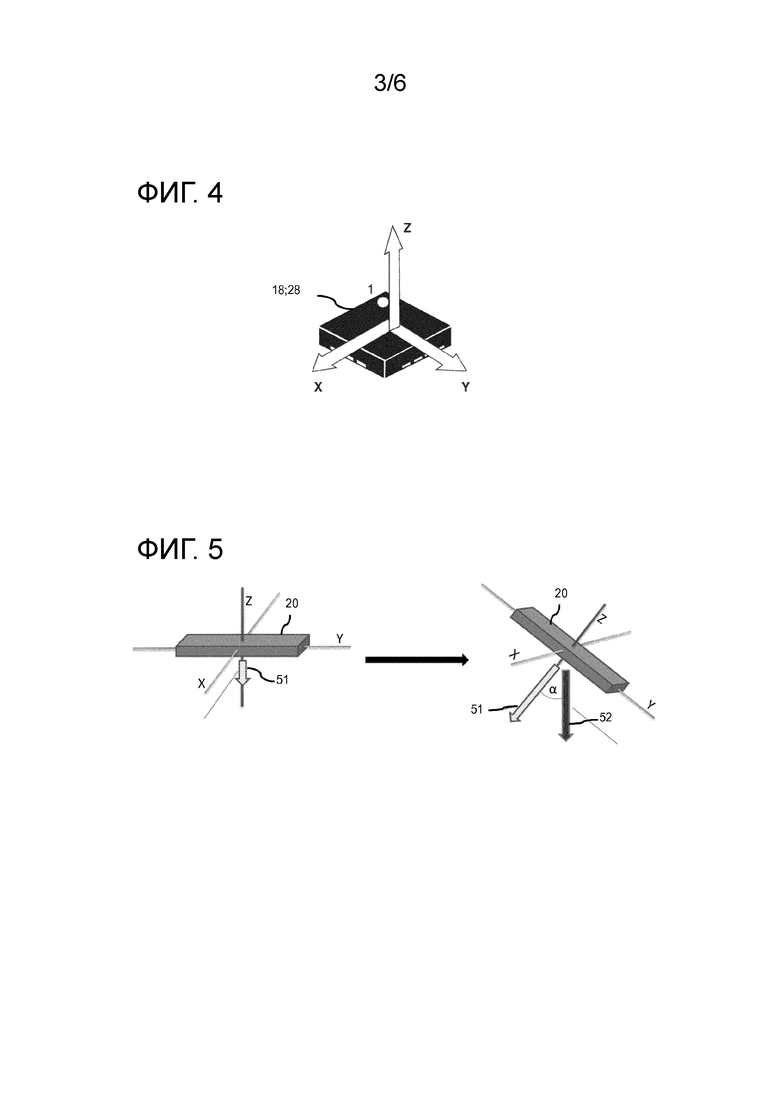
Фиг. 4 показывает 3-осевой акселерометр в качестве примера датчика ориентации, показанного на Фиг. 3,
Фиг. 5 схематично показывает пример электронного мобильного устройства в соответствии с изобретением, когда оно лежит лицевой стороной вверх (левая сторона) и когда ориентировано в другой ориентации (левая сторона).
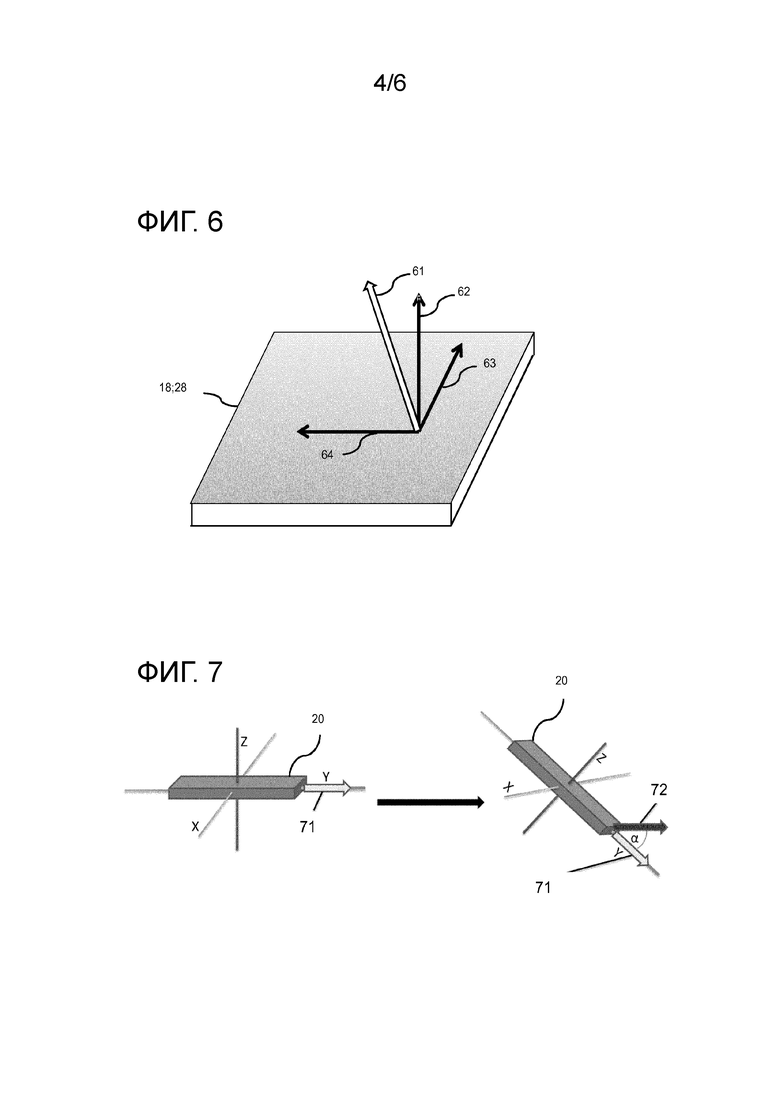
Фиг. 6 схематично показывает 3-осевой магнитометр в качестве дополнительного примера датчика ориентации, показанного на Фиг. 3,
Фиг. 7 схематично показывает, на левой стороне, электронное мобильное устройство в соответствии с изобретением, когда оно лежит лицевой стороной вверх, и, на правой стороне, в другой ориентации,
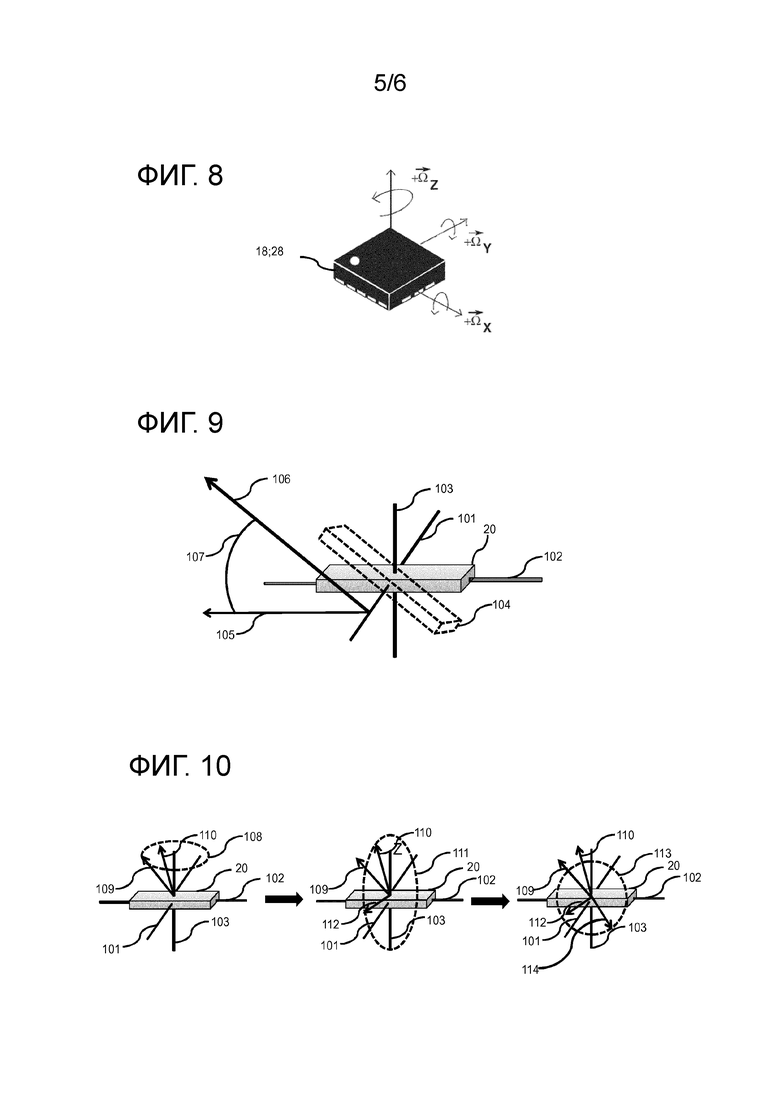
Фиг. 8 схематично показывает 3-осевой гироскоп в качестве дополнительного примера датчика ориентации, показанного на Фиг. 3,
Фиг. 9 схематично показывает электронное мобильное устройство в соответствии с изобретением и дифференциальный угол, измеряемый 3-осевым гироскопом по Фиг. 8,
Фиг. 10 схематично показывает электронное мобильное устройство в соответствии с изобретением и некоторые дифференциальные углы, измеряемые 3-осевым гироскопом по Фиг. 8, и
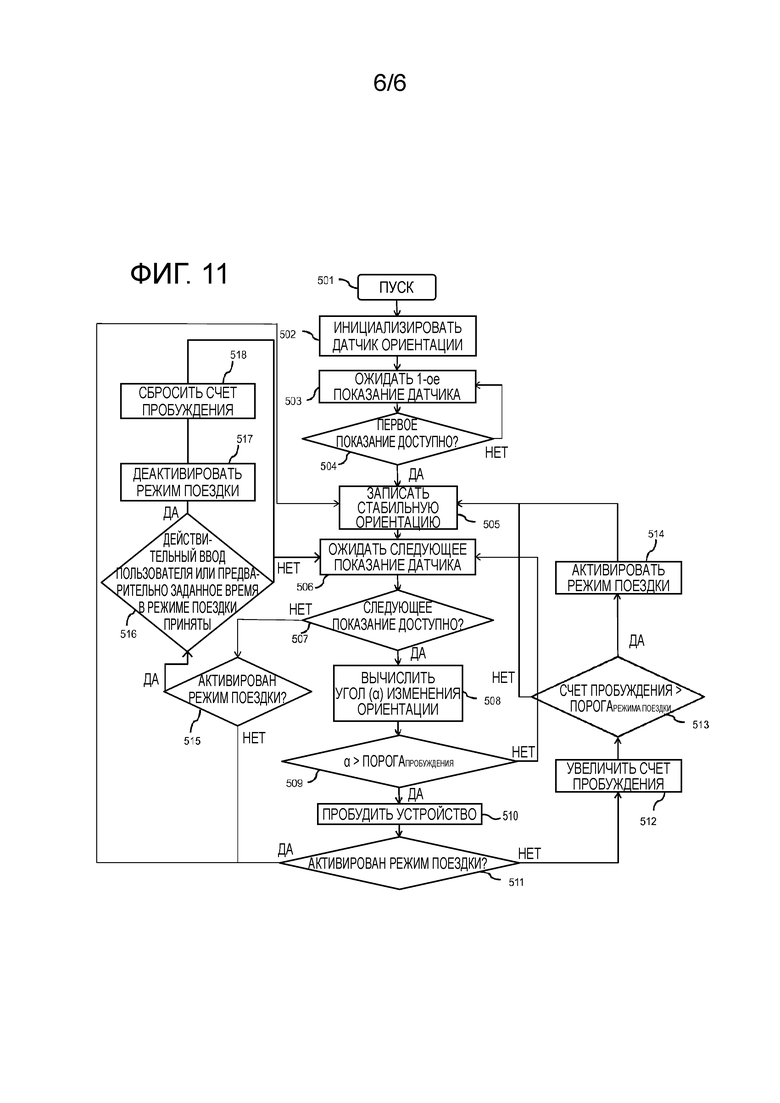
Фиг. 11 показывает блок-схему последовательности операций варианта осуществления способа в соответствии с изобретением переключения электронного мобильного устройства из режима низкого энергопотребления в режимы высокого энергопотребления.
Фигуры являются чисто схематичными и не нарисованы в масштабе. На Фигурах элементы, которые соответствуют уже описанным элементам, могут иметь одинаковые ссылочные позиции.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Фиг. 1 схематично показывает вид в перспективе электронного мобильного устройства в соответствии с вариантом осуществления изобретения. В этом примере устройство является электробритвой 10. Электробритва 10 содержит корпус 12 и ножевой блок 13. Внутри корпуса 12 расположен электродвигатель 14, который предназначен для приведения в действие ножевого блока 13. Электробритва 10 дополнительно содержит процессор 15, перезаряжаемый аккумулятор 16, интерфейс 17 пользователя и датчик 18 ориентации. Процессор 15 предназначен для приема ввода от интерфейса 17 пользователя и от датчика 18 ориентации. Двигатель 14, процессор 15 и интерфейс 17 пользователя питаются с помощью перезаряжаемого аккумулятора 16. Интерфейс 17 пользователя может содержать сенсорный экран для ввода сигнала пользователем.
Фиг. 2 схематично показывает вид в перспективе электронного мобильного устройства в соответствии с дополнительным вариантом осуществления изобретения. В этом примере устройство является мобильным телефоном 20. Мобильный телефон 20 содержит корпус 22 и интерфейс 27 пользователя. Внутри корпуса 22, позади интерфейса 27 пользователя размещены процессор 25 и перезаряжаемый аккумулятор 26. Мобильный телефон дополнительно содержит датчик 28 ориентации. Обратите внимание на то, что на Фиг. 2 интерфейс 27 пользователя выполнен прозрачным, так что процессор 25, перезаряжаемый аккумулятор 26 и датчик 28 ориентации являются видимыми.
Процессор 25 предназначен для приема ввода от интерфейса 27 пользователя и от датчика 28 ориентации. Процессор 25 и интерфейс 27 пользователя питаются с помощью перезаряжаемого аккумулятора 26. Интерфейс 27 пользователя может содержать сенсорный экран для ввода сигнала пользователем. Как будет ясно специалисту в соответствующей области техники, мобильный телефон 20 может дополнительно содержать антенну, передатчик, приемник, память для хранения данных и т.д.
Фиг. 3 схематично показывает процессор 15, 25, аккумулятор 16, 26 и датчик 18, 28 ориентации в соответствии с вариантом осуществления. Для экономии заряда аккумулятора электронное мобильное устройство 10, 20 содержит блок 5 управления режимом устройства, предназначенный для переключения устройства 10, 20 из режима низкого энергопотребления в режим высокого энергопотребления и наоборот. Переключение между режимом низкого энергопотребления и режимом высокого энергопотребления будет зависеть от изменения ориентации устройства 10, 20, измеряемой датчиком 18, 28 ориентации, присутствующим в устройстве 10, 20. Датчик 18, 28 ориентации предназначен для многократного определения текущей ориентации устройства 10, 20. Например, датчик 18, 28 ориентации может быть акселерометром, выдающим значения измерения каждые 100 мс.
Электронное мобильное устройство 10, 20 может дополнительно содержать процессор 6, предназначенный для приема текущей ориентации от датчика 18, 28 ориентации. Процессор 6 периодически сохраняет измеренную текущую ориентацию в качестве новой опорной ориентации и периодически вычисляет дифференциальный угол между текущей ориентацией и сохраненной опорной ориентацией. Если дифференциальный угол превышает предварительно заданное угловое пороговое значение, процессор 6 выдает команду блоку 5 управления режимом устройства на переключение устройства из режима низкого энергопотребления в режим высокого энергопотребления, тем самым 'пробуждая' устройство.
Предпочтительно функция пробуждения способна пробуждать устройство всякий раз, когда пользователь подхватывает его, при этом одновременно предотвращая пробуждение устройства в других обстоятельствах. При пробуждении устройства на основе изменений его ориентации, устройство может пробуждаться независимо от того, какова текущая опорная ориентация (например, тыльной стороной вверх, на боку, лицевой стороной вверх, некая промежуточная ориентация).
Решение пробуждать или нет устройство принимается с помощью определения, превышает или нет дифференциальный угол предварительно заданное угловое пороговое значение. На практике, когда пользователь подхватывает устройство, ориентация всегда будет меняться в некоторой степени. Вследствие этого, при установке предварительно заданного углового порога на низкое значение (например, от 10 до 15 градусов), можно убедиться, что устройство пробуждается, когда оно нормально подхватывается. Следует соблюдать осторожность и не делать этот угловой порог слишком маленьким, чтобы избежать того, что устройство будет пробуждаться из-за небольших ударов или вибраций. Когда устройство пробудилось, измеренная текущая ориентация сохраняется в качестве новой опорной ориентации.
Процессор 6 периодически принимает текущую ориентацию от датчика 18, 28 ориентации, вычисляет дифференциальный угол между текущей ориентацией и сохраненной опорной ориентацией, и сравнивает дифференциальный угол с предварительно заданным угловым пороговым значением. Частота упомянутого периодического приема текущей ориентации и вычисления и сравнения дифференциального угла находится в диапазоне между 5-15 Гц, предпочтительно около 10 Гц.
Измеряемая текущая ориентация периодически сохраняется в качестве новой опорной ориентации. В соответствии с изобретением, частота упомянутых периодического приема и сохранения текущей ориентации в качестве новой опорной ориентации ниже упомянутой частоты упомянутых периодического приема текущей ориентации от датчика ориентации, вычисления дифференциального угла между текущей ориентацией и сохраненной опорной ориентацией и сравнения дифференциального угла с предварительно заданным угловым пороговым значением.
Частота упомянутых периодического приема и сохранения текущей ориентации в качестве опорной ориентации находится в диапазоне между 0,25 и 0,5 Гц. Подъем этой частоты будет означать, что изменения угловой ориентации должны быть быстрее, чтобы быть обнаруженными. Понижение этой частоты будет означать, что устройство будет становиться более восприимчивым к медленным изменениям ориентации. Упомянутые периодический прием и сохранение текущей ориентации в качестве опорной ориентации выполняется не только когда устройство пробуждено (режим высокого энергопотребления), но также когда оно находится в режиме низкого энергопотребления.
В этом периодическом обновлении опорной ориентации есть несколько преимуществ. Прежде всего гарантируется, что опорная ориентация совпадает с текущей ориентацией, когда устройство лежит в стабильном положении. Во-вторых, гарантируется, что опорная ориентация адаптируется к изменениям ориентации, когда устройство пробуждено. Если этого не делать, устройство может пробуждаться немедленно после перехода в спящий режим, в зависимости от последней измеренной опорной ориентации, сравненной с измеренной текущей ориентацией. В заключение, в случае, когда ориентация устройства меняется медленно в спящем режиме, периодическое обновление опорной ориентации предотвращает пробуждение устройства в результате относительно медленных изменений ориентации, которые могут происходить, например, когда устройство лежит в чемодане и медленно опускается между стопками одежды.
В варианте осуществления процессор 6 выполнен с возможностью подразделения режима низкого энергопотребления на спящий режим и режим поездки. С помощью этого варианта осуществления предполагается, что, если устройство пробуждается предварительно заданное число раз в предварительно определенный период времени без какого-либо вмешательства пользователя, устройство находится в поездке. Например, устройство может храниться в чемодане, который перемещается во время поездки, тем самым иногда вызывая смещение устройства таким образом, что его ориентация меняется до такой степени, что достигается предварительно заданный угловой порог. В этом варианте осуществления, если устройство переключается в режим высокого энергопотребления предварительно заданное число раз в предварительно определенный период времени без какого-либо регистрируемого вмешательства пользователя, процессор 6 переключает устройство в режим поездки. Как спящий режим, так и режим поездки являются режимами низкого энергопотребления, означая, что устройство работает на минимальном уровне и не способно принимать ввод пользователя через его интерфейс пользователя. Однако, в спящем режиме предварительно заданное угловое пороговое значение меньше, чем в режиме поездки. В спящем режиме предварительно заданное угловое пороговое значение может находиться в диапазоне от 10 до 15 градусов, а в режиме поездки предварительно заданное угловое пороговое значение может находиться в диапазоне от 60 до 65 градусов.
При простом изменении минимального изменения угла ориентации, которое запускает пробуждение (т.е. предварительно заданного углового порогового значения), может быть изменена чувствительность к изменению ориентации устройства. Этот механизм используется для переключения между спящим режимом и режимом поездки. Этот подход позволяет датчику ориентации оставаться активным. Вследствие этого устройство остается реагирующим все время без необходимости в дополнительном аппаратном обеспечении, подобном механическому переключателю. Это уменьшает стоимость материалов и сложность устройства, при этом в тоже самое время приводя к лучшему механизму взаимодействия с пользователем.
Когда устройство находится в поездке, дифференциальный угол будет увеличиваться из-за тряски и перекатывания в сравнении со стабильным состоянием вне поездки. Вследствие этого, в соответствии с вариантом осуществления, предварительно заданное угловое пороговое значение увеличивается, когда устройство переключается в режим поездки, чтобы гарантировать, что устройство не пробуждается непреднамеренно. С другой стороны, пользователю по-прежнему требуется возможность простого пробуждения устройства. Реализация реального окружения показывает, что угловое пороговое значение от 60 до 65 градусов является подходящим для режима поездки. Оно гарантирует, что устройство будет оставаться в спящем режиме в большинстве обстоятельств поездки, при этом по-прежнему позволяя пользователю пробуждать устройство посредством более значительных изменений ориентации (например, поворота/наклона). Только более значительные изменения, такие как переворот чемодана на сторону или резкая встряска, приведут к запуску пробуждения. Конечно это нежелательно, но также критично гарантировать то, что пользователь по-прежнему может легко пробуждать устройство (посредством более значительного изменения угла). Реализация реального окружения показывает, что этот подход приводит к приемлемому поведению пробуждения, несмотря на то, что некоторым пользователям требуется привыкание.
Как упомянуто выше, устройство может быть переключено в режим поездки автоматически, когда оно пробуждалось предварительно заданное число раз. В варианте осуществления процессор 6 переключает устройство из режима поездки в спящий режим, если устройство находилось в режиме поездки предварительно заданное максимально время поездки. Это будет гарантировать максимальную способность устройства к быстрому реагированию все время. Значения для предварительно заданного максимального времени поездки и предварительно заданного числа раз могут быть настроены для сценариев использования фактического устройства. Можно предположить, что эти значения вводятся пользователем через интерфейс пользователя.
Дополнительно отмечается, что устройство может содержать установку блокировки во время поездки, при этом устройство вручную переключается в режим поездки.
В варианте осуществления датчик 18, 28 ориентации выполнен в виде 3-осевого акселерометра, см. Фиг 4. Этот тип датчика способен измерять силу тяжести в виде статического ускорения веса 1 г. Таким образом, направление силы тяжести, и вследствие этого ориентация устройства, может быть определено при построении вектора с помощью значений по осям X, Y и Z акселерометра в качестве его составляющих. Этот принцип показан на Фиг. 5. На левой стороне Фиг. 5 устройство 20 показано лежащим лицевой стороной вверх. Стрелка 51 указывает направление силы тяжести. Показанные оси X, Y и Z соответствуют 3 осям акселерометра. Когда устройство 20 загружается первый раз, акселерометр считывается и этот начальный набор показаний сохраняется в качестве опорной ориентации. Изменения ориентации устройства, такие как наклон устройства, меняют измеряемое направление силы тяжести, см. стрелку 52 на правой стороне Фиг. 5. Когда это происходит, угол между вектором стабильной и текущей ориентации может быть определен при вычислении скалярного произведения этих двух векторов:
 ,
,
где:
α=Угол между двумя векторами
Xc=Составляющая X текущего вектора
Yc=Составляющая Y текущего вектора
Zc=Составляющая Z текущего вектора
Xs=Составляющая X стабильного вектора
Ys=Составляющая Y стабильного вектора
Zs=Составляющая Z стабильного вектора
В другом варианте осуществления датчик ориентации выполнен в виде 3-осевого магнитометра. Этот тип датчика способен измерять силу и направление (в 3 измерениях) магнитных полей. Это включает в себя измерение магнитного поля Земли. Вследствие этого, используя данные датчика, может быть построен 3D вектор, который указывает на магнитный сервер. Фиг. 6 показывает пример 3-осевого магнитометра. На Фиг. 6 стрелка 61 указывает ориентацию устройства по отношению к направлениям магнитного севера, востока и верха. Стрелка 62 указывает направление магнитного «верха (Z)». Стрелка 63 указывает направление магнитного «Востока (X)». Стрелка 64 указывает направление магнитного «Севера (Y)».
Вследствие этого, тот же самый подход, как описанный для акселерометра, может быть использован для определения изменений 3D ориентации во времени и для запуска процедуры пробуждения, когда превышается угловой порог. Этот принцип показан на Фиг. 7. Фиг. 7 показывает, на левой стороне, устройство 20, лежащее лицевой стороной вверх. Стрелка 71 указывает направление магнитного севера Земли, которое в этом примере имеет сходство с Y-осью датчика в устройстве 20. Это направление будет сохранено в качестве опорной ориентации 71. Как только ориентация меняется, см. правую сторону Фиг. 7, дифференциальный угол α присутствует между предыдущей опорной ориентацией 71 устройства 20 и текущей ориентацией 72. Преимущество этого варианта осуществления состоит в том, что практически отсутствует дрейф в показаниях датчика. Кроме того, этот тип датчика нечувствителен к ударам и вибрациям.
В еще одном варианте осуществления датчик ориентации выполнен в виде 3-осевого гироскопа, предназначенного для измерения угловой скорости по 3 осям. Этот тип датчика способен измерять частоту вращения по 3 осям. Как правило выходной сигнал представляется в форме градусов в секунду или оборотов в секунду. Пример такого датчика 18, 28 ориентации показан на Фиг. 8. 3-осевой гироскоп 18, 28 выполнен с возможностью вывода данных в градусах в секунду. С помощью этого типа датчика могут быть измерены только изменения ориентации. Абсолютная ориентация устройства 20 будет неизвестна, но фактически не требуется принимать решение по пробуждению устройства 20. Пробуждение устройства основано на изменение ориентации, и фактическая абсолютная ориентация не требуется.
Для того, чтобы иметь возможность извлечения суммарного количества оборотов вокруг оси во времени, требуется часто производить выборку вывода 3-осевого гироскопа, чтобы произвести точную оценку. Эта выборка также должна выполняться, если устройство 20 находится в режиме низкого энергопотребления. Однако, осуществление выборки у 3-осевого гироскопа может использовать слишком много заряда батареи, что противоречит тому, что устройство находится в режиме низкого энергопотребления. Для решения этого противоречия, в соответствии с вариантом осуществления задается минимальный порог угловой скорости, которая требуется для измерения относительно по меньшей мере одной из 3 осей. Если угловая скорость ниже этого минимального порога угловой скорости, устройство 20 переключается в низкую частоту выборки для того, чтобы минимизировать энергопотребление. Когда угловая скорость относительно по меньшей мере одной из осей превышает минимальный порог угловой скорости, устройство 20 пробуждается и начинает контролировать угловую скорость. Преобразование измеренной угловой скорости в градусах в секунду в фактическое изменение угла в градусах может быть выполнено с использованием:
Угол = Угловая скорость/Время,
где:
Угол является дифференциальным углом в градусах
Угловая скорость является скоростью изменения в градусах в секунду
Время является значением времени в секундах, когда измерялась угловая скорость.
Например, если измеренная угловая скорость составляет 10 градусов в секунду и эта скорость измерялась в течение 2 секунд, фактическое угловое изменение составляет 10×2=20 градусов. Точность измерения зависит от выбранной частоты выборки, так как изменения угловой скорости, происходящие между выборками датчика, не будут измеряться. Вследствие этого низкая скорость выборки приводит к относительно низкой точности, но сберегается энергия и устройство может оставаться в режиме низкого энергопотребления.
Изменения угла, измеряемые 3-осевым гироскопом по Фиг. 8, могут быть преобразованы в решение пробуждения/сна с использованием 2 разных способов. Устройство может быть пробуждено, когда изменение угла относительно по меньшей мере одной из 3 осей превышает порог. Этот первый способ является вычислительно экономным. Ожидается, что он обеспечивает адекватную производительность для этого типа применения. В качестве альтернативы, изменение угла всех 3 осей может быть объединено для построения 3D вектора, и далее может быть вычислен угол между 3D вектором и начальным опорным вектором. Этот второй способ сходен со способом, используемым в варианте осуществления с акселерометром по Фиг. 4. Второй способ требует значительного объема мощности обработки, но объединяет результаты всех трех осей для принятия решения о том, требуется ли пробуждение. Вследствие этого он более универсальный, чем первый способ.
Фиг. 9 показывает принцип первого способа. Бокс 20 представляет записанную опорную ориентацию корпуса устройства 20. Ось 101 представляет ось X датчика ориентации устройства. Ось 102 представляет ось Y датчика ориентации устройства. Ось 103 представляет ось Z датчика ориентации устройства. Бокс 104 представляет текущую ориентацию корпуса устройства. Стрелка 105 представляет вектор ориентации записанной опорной ориентации устройства. Стрелка 106 представляет вектор ориентации текущей ориентации устройства. Угол 107 представляет измеренный дифференциальный угол между вектором записанной опорной ориентации и вектором текущей ориентации.
Фиг. 10 показывает принцип второго способа. На левой стороне Фиг. 10 показывает каким образом опорный вектор может быть повернут по 3 осям на основе вычисленных изменений ориентации для того, чтобы построить опорный вектор. Дифференциальный угол между опорным вектором и повернутым вектором затем может быть использован для определения фактического изменения ориентации. Форма 20 представляет корпус устройства. Ось 101 представляет ось X гироскопа. Ось 102 представляет ось Y гироскопа. Ось 103 представляет ось Z гироскопа. Окружность 108 представляет вращение вокруг оси Z. Стрелка 109 представляет опорный вектор. Стрелка 110 представляет опорный вектор, повернутый по оси Z. Окружность 111 представляет вращение вокруг оси Y. Стрелка 112 представляет опорный вектор, повернутый как по оси Z, так и по оси Y. Окружность 113 представляет вращение вокруг оси X. Стрелка 114 представляет опорный вектор, повернутый по осям Z, Y и X. Угол между данным вектором и опорным вектором используется для определения того, требуется ли или нет пробудить устройство.
Преимущества использования 3-осевого гироскопа состоят в том, что такой датчик способен измерять быстрые изменения частоты вращения по его осям и что датчик невосприимчив к ударам и вибрациям.
В соответствии с аспектом изобретения, предоставляется способ переключения электронного мобильного устройства из режима высокого энергопотребления в режим низкого энергопотребления и наоборот. Способ содержит: периодический прием текущей ориентации устройства от датчика ориентации мобильного устройства. В текущую ориентацию периодически задается новая опорная ориентация. Эта новая опорная ориентация может быть записана процессором 6 (см. Фиг. 3) в памяти устройства 20. Далее между текущей ориентацией и новой опорной ориентацией вычисляется дифференциальный угол. Затем вычисленный дифференциальный угол сравнивается с предварительно заданным угловым порогом. Если вычисленный дифференциальный угол превышает предварительно заданный угловой порог, устройство переключается из режима низкого энергопотребления в режим высокого энергопотребления.
Фиг. 11 показывает блок-схему последовательности операций способа переключения электронного мобильного устройства из режима низкого энергопотребления в режим высокого энергопотребления в соответствии с вариантом осуществления изобретения. Этот способ может быть выполнен процессором, размещенным в мобильном электронном устройстве 20. Способ может начинаться, см. этап 501, когда устройство 20 загружается первый раз. После пуска 501, датчик ориентации инициализируется, см. этап 502. Затем процессор ожидает первое показание датчика, см. этап 503. Если показание доступно, см. проверку 504, записывается (новая) опорная ориентация, см. этап 505, например, при временном сохранении значения измеренной текущей ориентации в памяти. Далее, на этапе 506, процессор ожидает до тех пор, пока не станет доступно следующее показание датчика, см. 507. Когда следующее показание недоступно, проверка 515 определяет, активирован ли режим поездки. Если результатом является НЕТ, будет вновь выполнен этап 506. Если результатом является ДА, выполняется проверка 516. Эта проверка определяет, является ли истинным одно из следующих двух условий:
- Устройство находилось в режиме поездки предварительно заданное время
- Был принят действительный ввод пользователя
Если результатом проверки 516 является ИСТИНА, выполняется этап 517, на котором режим поездки деактивируется. Если результатом проверки 516 является ЛОЖЬ, следует этап 506. После этапа 517 выполняется этап 518, на котором сбрасывается «счет пробуждения». После этапа 518 вновь следует этап 506. Если доступно следующее показание, следует этап 508, на котором вычисляется дифференциальный угол α, представляющий изменение ориентации, см. 508. Далее, при проверке 509 определяется, является ли дифференциальный угол α больше предварительно заданного углового порогового значения. Если результатом проверки 509 является истина, следует этап 510, на котором устройство пробуждается, т.е. переключается в режим высокого энергопотребления. Если результатом проверки 509 является ложь, следует этап 506, на котором алгоритм ожидает следующее показание датчика. После этапа 510 проверяется, активирован ли режим поездки, см. 511. Если результатом является ДА, следует этап 505 и измеренная текущая ориентация записывается в качестве новой опорной ориентации. Если результатом проверки 511 является НЕТ, следует этап 512, на котором счетчик, называемый 'счетом пробуждения' увеличивается. Увеличение может быть выполнено с шагами приращения по единице. Далее, при проверке 513 значение счетчика пробуждения сравнивается с так называемым 'порогом режима поездки'. Если счет пробуждения больше порога режима поездки, режим поездки активируется, см. этап 514. Теперь устройство будет находиться в режиме поездки, который является режимом низкого энергопотребления устройства, отличным от спящего режима. Основное отличие между спящим режимом и режимом поездки состоит в значении углового порогового значения, используемого при проверке 509. В варианте осуществления угловое пороговое значение в режиме поездки больше углового порогового значения в спящем режиме. Это приводит к тому, что устройство является менее чувствительным к изменениям ориентации при нахождении в режиме поездки. После переключения в режим поездки опорная ориентация вновь записывается, см. этап 505.
Если результатом проверки 513 является НЕТ, устройство остается в спящем режиме и следует этап 505. В варианте осуществления устройство переключается из режима поездки обратно в спящий режим, если устройство находилось в режиме поездки предварительно заданное максимальное время поездки. Например, если устройство находилось в режиме поездки в течение, например, 2 часов, процессор 6 принимает решение о переключении устройства в спящий режим с тем, чтобы устройство было более чувствительным к изменениям ориентации и легко пробуждалось, когда пользователь подхватывает устройство. Таким образом, процессор в этом случае ожидает, что поездка длиться около двух часов. Отмечается, что установка максимального времени поездки может быть оптимизирована в зависимости от конкретного применения. Оно также может быть введено пользователем через диалог на экране интерфейса пользователя устройства.
В вышеописанных вариантах осуществления устройство переключается из режима низкого энергопотребления в режим высокого энергопотребления и наоборот. Вместо режима низкого энергопотребления и высокого энергопотребления устройство может быть переключено между первым и вторым режимами работы, отличными от режимов низкого энергопотребления и высокого энергопотребления. Например, устройство может быть переключено между двумя режимами, оба из которых используют почти одинаковую величину мощности.
Отмечается, что в этом документе слово 'содержащий' не исключает присутствия элементов или этапов отличных от тех, которые перечислены, и формы единственного числа, предшествующие элементу, не исключают присутствия множества таких элементов, и что любые ссылочные обозначения не ограничивают объем формулы изобретения. Дополнительно, изобретение не ограничивается вариантами осуществления и изобретение заключается в каждом и любом новом признаке или сочетании признаков, описанных выше или изложенных во взаимно разных зависимых пунктах формулы изобретения.
Изобретение относится к электронным устройствам. Технический результат заключается в расширении арсенала средств. Электронное мобильное устройство содержит блок управления режимом устройства для переключения мобильного устройства из первого во второй режим работы. Датчик ориентации выполнен с возможностью измерения текущей ориентации мобильного устройства. Процессор периодически принимает текущую ориентацию от датчика ориентации, сохраняет принятую текущую ориентацию в качестве опорной и вычисляет дифференциальный угол между текущей и сохраненной опорной ориентацией. Устройство переключается из первого во второй режим работы, если дифференциальный угол превышает предварительно заданное угловое пороговое значение. Частота периодического приема и сохранения текущей ориентации в качестве опорной ориентации ниже частоты упомянутых периодического приема текущей ориентации, периодического вычисления и периодического сравнения дифференциального угла. 2 н. и 12 з.п. ф-лы, 11 ил.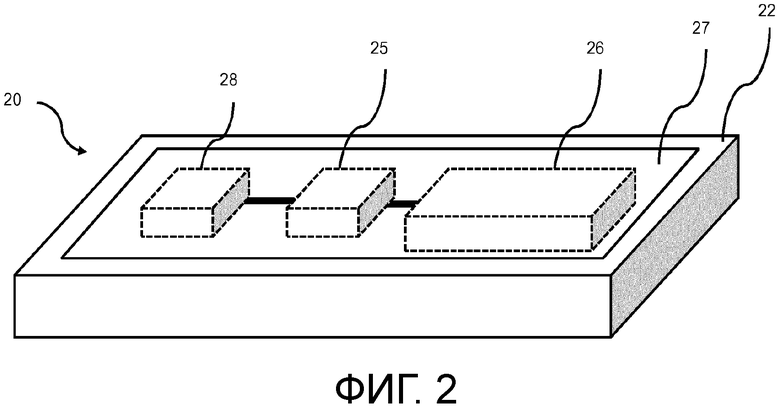
1. Электронное мобильное устройство (10; 20), содержащее:
- блок (5) управления режимом устройства, сконфигурированный и предназначенный для переключения мобильного устройства из первого режима работы во второй режим работы и наоборот;
- датчик (18; 28) ориентации, сконфигурированный и предназначенный для измерения текущей ориентации мобильного устройства;
- процессор (6), сконфигурированный и выполненный таким образом, что во время работы мобильного устройства процессор:
- принимает текущую ориентацию от датчика ориентации и сохраняет принятую текущую ориентацию в качестве опорной ориентации мобильного устройства,
- периодически принимает текущую ориентацию от датчика ориентации, периодически вычисляет дифференциальный угол между текущей ориентацией и сохраненной опорной ориентацией и периодически сравнивает дифференциальный угол с предварительно заданным угловым пороговым значением, и
- выдает команду блоку управления режимом устройства на переключение мобильного устройства из первого режима работы во второй режим работы, если дифференциальный угол превышает предварительно заданное угловое пороговое значение,
отличающееся тем, что частота упомянутых периодического приема текущей ориентации, периодического вычисления и периодического сравнения дифференциального угла находится в диапазоне от 5 до 15 Гц, и тем, что процессор (6) сконфигурирован и выполнен таким образом, что во время работы мобильного устройства (10, 20) процессор периодически принимает текущую ориентацию от датчика ориентации и периодически сохраняет принятую текущую ориентацию в качестве опорной ориентации с частотой в диапазоне от 0,25 до 0,5 Гц.
2. Электронное мобильное устройство (10, 20) по п. 1, в котором первый режим работы является режимом низкого энергопотребления, а второй режим работы является режимом высокого энергопотребления.
3. Электронное мобильное устройство (10, 20) по любому из предшествующих пунктов, в котором предварительно заданное угловое пороговое значение находится в диапазоне от 10 до 15 градусов или в диапазоне от 60 до 65 градусов.
4. Электронное мобильное устройство (10, 20) по любому из предшествующих пунктов, в котором процессор (6) сконфигурирован и выполнен таким образом, что во время работы мобильного устройства процессор сохраняет принятую текущую ориентацию в качестве опорной ориентации, когда мобильное устройство переключается из первого режима работы во второй режим работы.
5. Электронное мобильное устройство (10, 20) по п. 2, в котором процессор (6) сконфигурирован и выполнен таким образом, что в режиме низкого энергопотребления мобильного устройства процессор различает спящий режим и режим поездки, при этом, если мобильное устройство переключается из спящего режима в режим высокого энергопотребления предварительно заданное число раз во время предварительно заданного периода времени без регистрации какого-либо вмешательства пользователя, процессор выдает команду блоку (5) управления режимом устройства на переключение мобильного устройства в режим поездки.
6. Электронное мобильное устройство (10, 20) по п. 5, в котором в спящем режиме предварительно заданное угловое пороговое значение меньше, чем в режиме поездки.
7. Электронное мобильное устройство (10, 20) по п. 6, в котором в спящем режиме предварительно заданное угловое пороговое значение находится в диапазоне от 10 до 15 градусов, а в режиме поездки предварительно заданное угловое пороговое значение находится в диапазоне от 60 до 65 градусов.
8. Электронное мобильное устройство (10, 20) по любому из пп. 5-7, в котором процессор (6) выдает команду блоку (5) управления режимом устройства на переключение мобильного устройства из режима поездки в спящий режим, если мобильное устройство находилось в режиме поездки предварительно заданное максимальное время поездки.
9. Электронное мобильное устройство (10, 20) по любому из предшествующих пунктов, в котором датчик (18, 28) ориентации выполнен в виде 3-осевого акселерометра.
10. Электронное мобильное устройство (10, 20) по любому из предшествующих пунктов, в котором датчик (18, 28) ориентации выполнен в виде 3-осевого магнитометра.
11. Электронное мобильное устройство (10, 20) по любому из предшествующих пунктов, в котором датчик (18, 28) ориентации выполнен в виде 3-осевого гироскопа, сконфигурированного и предназначенного для измерения угловой скорости по 3 осям.
12. Электронное мобильное устройство (10, 20) по п. 11, в котором процессор (6) сконфигурирован и выполнен таким образом, что во время работы мобильного устройства процессор переключает частоту выборки датчика (18, 28) ориентации между относительно низкой частотой выборки и относительно высокой частотой выборки, при этом процессор переключает частоту выборки на относительно низкую частоту выборки, если измеренная угловая скорость относительно по меньшей мере одной из 3 осей ниже минимального порога угловой скорости, и при этом процессор переключает частоту выборки на относительно высокую частоту выборки, если измеренная угловая скорость относительно по меньшей мере одной из 3 осей выше минимального порога угловой скорости.
13. Электронное мобильное устройство (10, 20) по любому из предшествующих пунктов, при этом мобильное устройство является устройством (10) личной гигиены, устройством (20) мобильной связи, мобильным мультимедийным проигрывателем, фаблетом или мобильным вычислительным устройством.
14. Способ переключения электронного мобильного устройства (10, 20) из первого режима работы во второй режим работы и наоборот, содержащий:
- прием текущей ориентации мобильного устройства от датчика (18, 28) ориентации мобильного устройства и сохранение принятой текущей ориентации в качестве опорной ориентации мобильного устройства;
- периодический прием текущей ориентации от датчика ориентации, периодическое вычисление дифференциального угла между текущей ориентацией и сохраненной опорной ориентацией и периодическое сравнение дифференциального угла с предварительно заданным угловым пороговым значением; и
- переключение мобильного устройства из первого режима работы во второй режим работы, если дифференциальный угол превышает предварительно заданное угловое пороговое значение,
отличающийся тем, что частота упомянутых периодического приема текущей ориентации, периодического вычисления и периодического сравнения дифференциального угла находится в диапазоне от 5 до 15 Гц, и тем, что способ содержит периодический прием текущей ориентации мобильного устройства (10, 20) от датчика (18, 28) ориентации и периодическое сохранение текущей ориентации в качестве опорной ориентации с частотой в диапазоне от 0,25 до 0,5 Гц.
| Колосоуборка | 1923 |
|
SU2009A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| RU 2007124188 A, 10.02.2009. | |||

