Область техники
Настоящее изобретение относится к области устройств дистанционного управления, в частности, промышленным оборудованием, и более конкретно, таким оборудованием, как подъемное или погрузочно-разгрузочное оборудование, в особенности, козловыми кранами, мостовыми кранами, подъемными кранами, автопогрузчиками, вилочными погрузчиками, штабелерами, подъемниками-загрузчиками, самоходными лебедками, кранами-судоподъемниками, автоматизированными складами материально-технического снабжения, а также самоходными машинами: кузовами, лодочными прицепами для перевозки/трапами, проходческими машинами, насосами/бетономешалками, установленными на транспортное средство, буровыми машинами, помольными установками, стрелами для разрушения, строительными машинами, уборочной техникой, рельсовыми транспортными средствами, оборудованием для манипуляции лесоматериалами, сельскохозяйственными машинами.
Дистанционное управление является обычным режимом управления в данной отрасли. В процессе разработки недорогих технологий захвата движения недавно открыли пути для создания устройств дистанционного управления для прямого управлением аппаратом с помощью тела человека. Цель состоит в разработке интуитивного средства управления между человеком и машиной.
Уровень техники
В уровне техники известны средства управления, размещаемые на руке оператора и позволяющие ему/ей эксплуатировать управляемым устройством.
Например, в международной заявке WO 2014164168 описывается система управления транспортным средством для манипулирования материалами, содержащая ручное беспроводное устройство дистанционного управления, переносимое оператором, взаимодействующим с транспортным средством для манипулирования материалами, и включает в себя док-зону, телекоммуникационное устройство со съемным креплением и устройство управления передвижением. Устройство управления передвижением соединено, с возможностью обмена информацией, с беспроводным передатчиком, при этом активация устройства управления передвижением приводит к передаче запроса на передвижение беспроводным передатчиком как сигнала первого типа, запрашивающего передвижение транспортного средства для манипулирования материалами по поверхности пола в первом направлении.
Также известна заявка на патент США US 2014358263, в которой описывается система управления для избирательного управления аудиосистемой, например, для воспроизведения аудиофайлов в порядке, задаваемом с помощью дерева диалогов. В состав этой системы управления входит пусковой механизм, предусмотренный в костюме, и приводимый в действие исполнителем, носящим этот костюм, для формирования и передачи, по меньшей мере, одного сигнала запуска для перемещения по дереву диалогов. Контроллер принимает сигнал запуска и передает сигнал управления, который инициирует воспроизведение аудиосистемой заранее записанного диалога.
Наконец, также известна международная заявка WO 2012054443, в которой описывается электронная перчатка управления, позволяющая осуществлять улучшенное управление беспроводными электронными устройствами кончиками пальцев пользователя. Вдоль пальцев и большого пальца перчатка выполнена из проводящих материалов, и при контакте проводящего материала на пальце с проводящим материалом на большом пальце возникает замыкание цепи, что передается на установленное на перчатке устройство управления, которое затем может генерировать беспроводные сообщения на такое удаленные электронные устройства, как мобильные телефоны, аудиопроигрыватели, устройства открытия гаражных дверей, программные и аппаратные средства военного назначения в рабочей обстановке и т.п.
Недостатки существующего уровня техники
Эти решения не являются в полной мере удовлетворительными для использования в промышленных условиях. В таких условиях основным ограничением является безопасность. Абсолютно необходимо исключить ненадлежащее управление, являющееся результатом, например, непроизвольного движения руки, снабженной перчаткой дистанционного управления, или неверного выбора кнопки на устройстве, оснащенном, согласно описанию в международной заявке WO 2014164168, множеством кнопок, каждая из которых соответствует конкретному действию.
Использования такой перчатки требует обучения, чтобы обладать способностью практически рефлекторного действия без риска ошибочного выбора среди различных имеющихся кнопок. Непроизвольное или неправильное нажатие кнопки необратимо запускает действие управляемого оборудования, которое может быть, в лучшем случае, некорректным, но иногда опасным.
Кроме того, устройство дистанционного управления подвергается воздействию многочисленных факторов (удары, пот, пыль, влажность и т.п.).
Перчатки, предлагаемые в уровне техники, не позволяют в полной мере решить эти проблемы, поскольку они требуют наличия большого числа различных размеров для обеспечения каждого оператора перчаткой дистанционного управления, соответствующей его/ее анатомическому строению. Кроме того, эти перчатки подвергаются воздействию высоких нагрузок, мало совместимых с интеграцией электронного компонента.
Решение, предлагаемое изобретением
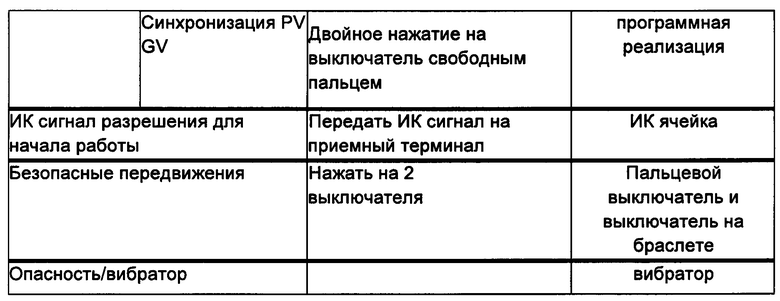
Для устранения этих недостатков настоящее изобретение, в своем наиболее широком смысле, относится к устройству дистанционного управления, включающему электронную схему, содержащую средство для регистрации положения, ориентации и движения кисти руки и/или предплечья такое как акселерометр, средство для передачи на радиочастоте сигнала управления, вычисленного в зависимости от зарегистрированных положения, ориентации и движения, а также средство для крепления на предплечье оператора, отличающееся тем, что оно дополнительно содержит приводимый в действие двумя пальцами выключатель, упомянутый выключатель управляет включением указанной электронной схемы и поддержанием сигнала управления пока воздействие на указанный выключатель не прекратится, а также опорную поверхность, связанную с выключателем, управляющим аварийной остановкой управляемого оборудования.
Такое решение решает проблему эксплуатационной безопасности, в частности, в отношении нарушений, обусловленных непреднамеренными движениями оператора. При этом также обеспечивается интуитивное, требующее лишь очень простого обучения использование с большим числом команд, которые могут быть переданы оператором, который должен только включить или выключить передачу команд, непрерывно получаемых в другом месте посредством движений его/ее кисти, его/ее плеча или его/ее предплечья.
Указанная электронная схема предпочтительно содержит пороговый детектор для генерирования сигнала управления, когда сигнал, измеренный указанным акселерометром, превышает пороговое значение, а также поддержание такого сигнала управления до тех пор, пока воздействие на указанный выключатель не будет прекращено.
Устройство по настоящему изобретению предпочтительно состоит из комплементарных модулей, включающих браслет, коробку, содержащую электронную схему и акселерометр, а также выключатель, выполненный с возможностью размещения на пальце.
Указанный акселерометр предпочтительно регистрирует ускорения вдоль трех перпендикулярных осей.
В другом варианте, гироскоп регистрирует угловое положение вдоль трех осей вращения.
В соответствии с другим альтернативным решением, устройство дополнительно включает магнитометр для регистрации магнитной ориентации.
В соответствии с другим альтернативным вариантом воплощения, устройство дополнительно содержит инерциальный блок, состоящий из акселерометра с тремя перпендикулярными осями, гироскопа с тремя осями вращения и трехкоординатного магнитометра.
Указанный инерциальный блок предпочтительно регистрирует угол наклона, ориентацию и ускорения вдоль трех перпендикулярных осей.
Устройство дополнительно включает кнопку аварийной остановки.
В соответствии с предпочтительным вариантом воплощения, устройство дополнительно включает один находящийся на коробке соединитель для подключения напальчника и зарядного устройства.
В соответствии с альтернативным вариантом воплощения, устройство дополнительно включает второй выключатель, установленный в электрической схеме и предназначенный для управления посредством второй руки.
В соответствии с другим альтернативным вариантом воплощения, устройство дополнительно включает множество выключателей для выбора управляемого оборудования или одной из функций управляемого оборудования.
Устройство предпочтительно содержит выключатель (7), являющийся цифровым, плавным или двухпозиционным.
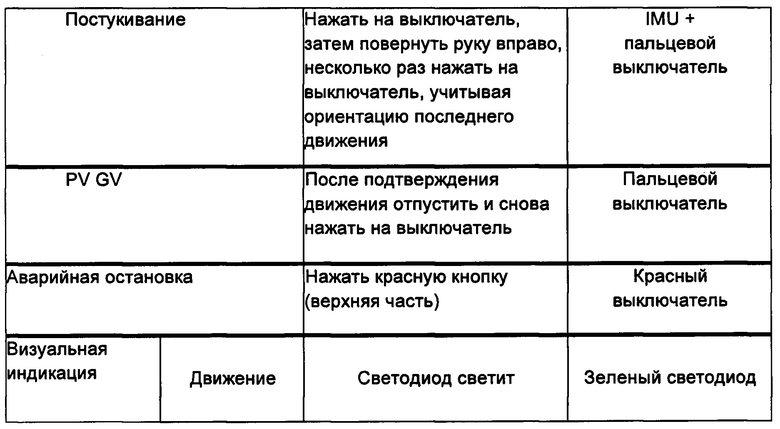
В соответствии с конкретным вариантом воплощения устройство дополнительно включает средство для управления режимом постукивания в соответствии с сохраненным последним направлением, зарегистрированным акселерометром, и повторенными воздействиями на выключатель.
В соответствии с другим конкретным вариантом воплощения, устройство дополнительно включает средство для управления передвижением с двумя скоростями.
Настоящее изобретение также относится к способу управления оборудованием в соответствии с протоколом, описанным ниже.
Подробное описание неограничивающего примера варианта воплощения
Лучше понять настоящее изобретение позволит ознакомление со следующим описанием, которое относится к неограничивающему примеру варианта воплощения и содержит ссылки на прилагаемые чертежи, где:
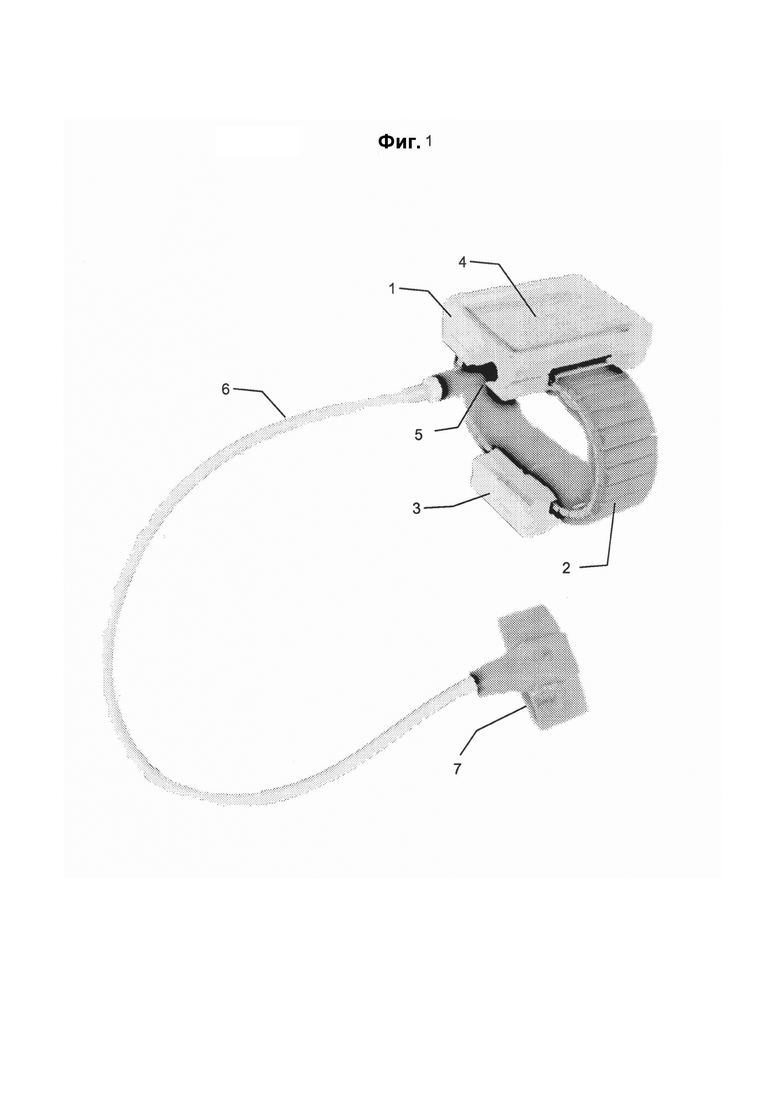
 На фиг. 1 показано схематическое изображение устройства в соответствии с настоящим изобретением,
На фиг. 1 показано схематическое изображение устройства в соответствии с настоящим изобретением,
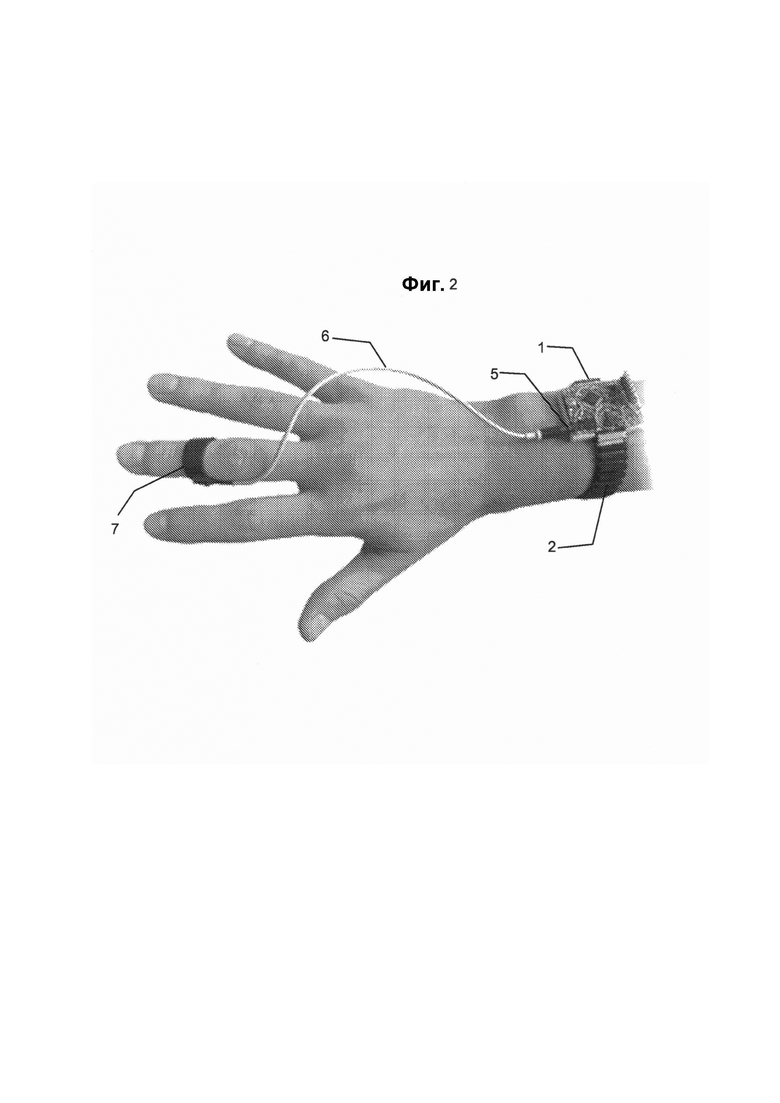
На фиг. 2 показано изображение устройства в соответствии с настоящим изобретением, носимого оператором
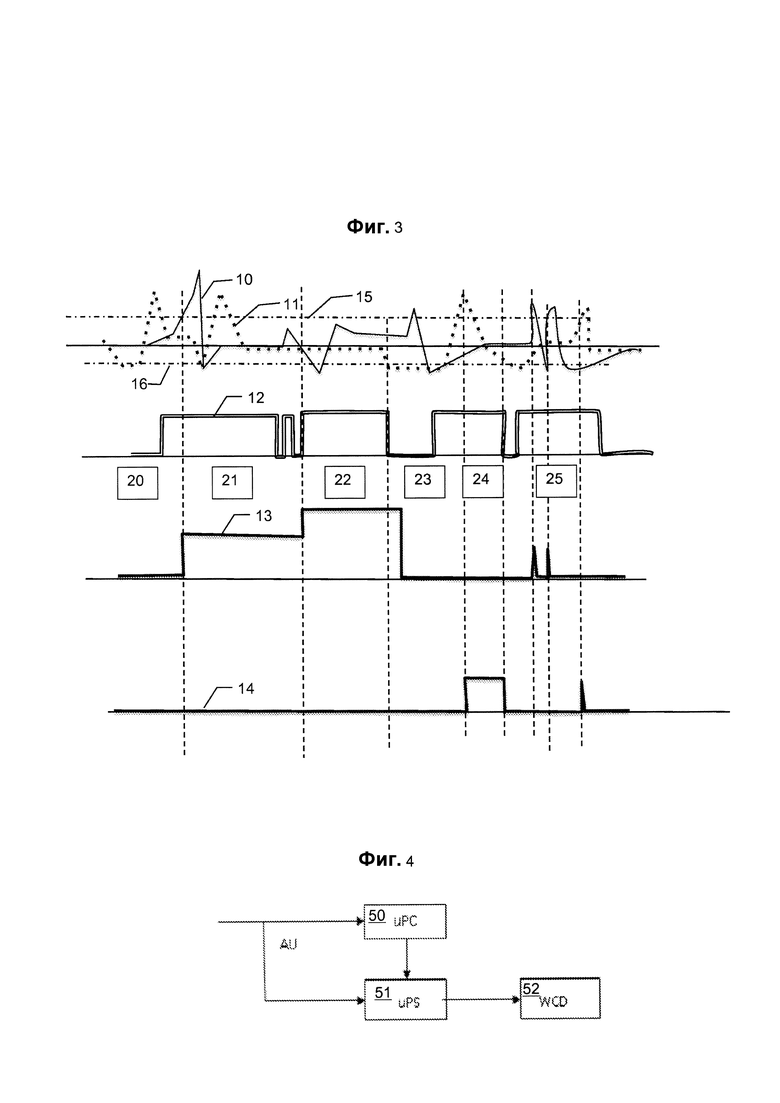
На фиг. 3 показаны временные графики сигналов
 На фиг. 4 показана блок-схема схемы управления.
На фиг. 4 показана блок-схема схемы управления.
В современном мире устройства дистанционного управления присутствуют на всех уровнях. Цель состоит в замене традиционных устройств дистанционного управления, управляя устройством непосредственно телом человека. Фактически, вопрос состоит в разработке интуитивного устройства управления между человеком и машиной. Это устройство управления надевается на руку, после чего оператор получает возможность воздействовать на управляемое устройство. Ввиду наличия большого числа вариантов использования, мы сосредоточились на одной области применения. Мы выбрали область промышленного применения, в частности область манипулирования. Мы хотим управлять "управляемыми" устройствами в области манипулирования, в частности, мостовыми кранами.
Управление почти всеми мостовыми кранами осуществляется с помощью устройства дистанционного управления, кабины управления или компьютерного интерфейса для создания соединения между человеком и машиной. Касательно устройств дистанционного управления, некоторые являются проводными, и некоторые беспроводными. К недостаткам беспроводных электронных средств связи относится их громоздкость, возможность легкой потери и необходимость нахождения в зоне прямой видимости во время нажатия кнопки.
Первая задача, решаемая настоящим изобретением, состоит не только в устранении основных ограничений, характерных для устройств дистанционного управления, но и в установлении дополнительного контроля во взаимодействии с различными устройствами, размещенными вокруг пользователя, которому больше не нужно будет беспокоиться о транспортировке, поломке, поиске устройства дистанционного управления, поскольку оно всегда будет «под рукой», и который сможет сосредоточиться на изменениях управляемого оборудования благодаря интуитивной работе с устройством дистанционного управления.
Пользователь управляет передвижениями просто посредством перемещения его/ее руки (например, движение руки вправо приводит к передвижению мостового крана вправо) и подтверждает передачу воздействием на выключатель.
Устройство состоит из двух комплементарных модулей. Один из модулей размещается на запястье и содержит «разум» устройства, т.е., микроконтроллер, датчики (IMU), передающую электронику и батарею. Второй модуль выполнен в форме кольца из нити, размещаемого на средней фаланге среднего или указательного пальцев. Этот второй модуль является гибкой частью устройства и позволяет захватывать движение путем простого нажатия на выключатель.
Первый пример варианта воплощения
Неограничивающий вариант воплощения настоящего изобретения относится к устройству дистанционного управления мостовым краном посредством движений руки.
Устройство содержит коробку 1, которая в описанном варианте может соединяться с браслетом 2 посредством разъемного механического соединения.
В коробке 1 размещается электронная схема, содержащая микроконтроллер, акселерометр, батарею и схему управления зарядом батареи. Верхняя часть коробки имеет поверхность 4, связанную с выключателем, позволяющим пользователю управлять функцией аварийной остановки управляемого оборудования.
На одной из боковых сторон коробки 1 также находится разъем 5, имеющий двойное назначение:
 когда не используется, он позволяет подключить соединитель для зарядки батареи,встроенной в коробку 1.
когда не используется, он позволяет подключить соединитель для зарядки батареи,встроенной в коробку 1.
 при использовании он позволяет подключить кабель 6, соединяющий размещенные в коробке 1 цепи с цифровым выключателем 7.
при использовании он позволяет подключить кабель 6, соединяющий размещенные в коробке 1 цепи с цифровым выключателем 7.
В описанном неограничивающем примере варианта воплощения на этом браслете предусматривается вторую коробку 3, в которой имеется электронная схема дистанционной передачи, использующая такой протокол как Bluetooth или ХВее, и главный переключатель. Вместо такого главного переключателя для перевода в режим ожидания эта электронная схема может содержать средства для автоматического управления переводом в режим ожидания или активации с использованием задержки, изменяющей период обнаружения движения, что делает этот переключатель необязательным. При работе частота приема сигналов, поступающих от акселерометра, является высокой, например, 50 раз в секунду. В отсутствие обнаруженных сигналов в течение предустановленного периода, например, нескольких минут, такая частота приема снижается до приема с периодом несколько секунд, например, каждые десять минут. Обнаружение движения во время таких периодов приема приводит к переключению схемы из режима ожидания в активный режим.
Указанный браслет, оснащенный электронными схемами, подключается к микровыключателю, имеющему форму кольца или напальчника, надетого на среднюю фалангу среднего пальца или указательного пальца и позволяющему авторизовывать захват движения в зависимости от его состояния.
Такой микровыключатель управляется нажатием другого пальца, как правило, большого пальца, на это кольцо, надетое на другой палец.
Это устройство работает следующим образом:
При расположении браслета движения предплечья оператора запускают переход в активный режим.
До тех пор, пока выключатель в составе кольца 7 не активирован, формируемые акселерометром сигналы игнорируются, и схема дистанционной передачи не передает сигналы управления приемнику, установленному на оборудовании, например, на управляемом козловом кране.
Тем не менее, электронная схема может формировать передаваемые на управляемое оборудование кадры управления, содержащие информацию о состоянии электронной схемы, идентификаторе схемы, сохраненном в запоминающем устройстве, состоянии заряда батареи или мощности передаваемого сигнала, например.
Когда оператор активирует микровыключатель, предусмотренный на напальчнике 7, электронная схема анализирует сигналы, передаваемые акселерометром, для определения направления движения устройства. В случае трехкоординатного акселерометра обработка состоит в определении наиболее вероятного направления (вертикальное, поперечное, продольное), а также его ориентации (вверх/вниз, влево/вправо, вперед/назад). В течение того времени, пока оператор удерживает микровыключатель в активном режиме, электронная схема передает эту информацию приемнику, предусмотренному на управляемом оборудовании, посредством радиочастотной схемы. Как только воздействие на выключатель прекращается, устройство посылает сигнал прекратить текущее передвижение.
При выполнении этой последовательности направление движения и ориентация остаются такими, какими они были зарегистрированы в момент активации выключателя. Если оператор затем двигает свою руку в разных направлениях, это не влияет на характер передвижения управляемого оборудования по истечению заданного промежутка времени.
В альтернативном варианте этой последовательности в течение этого заданного промежутка времени оператор выполняет сочетание движений с целью выполнения сочетания передвижений (например, вправо и вниз).
В соответствии с альтернативным вариантом воплощения, повторяющееся воздействие на выключатель в течение ограниченного периода времени, например, два нажатия с интервалом менее одной секунды с последующим удержанием нажатия, приводят к переключению из первого режима передвижения во второй режим передвижения (например, быстро/медленно) или к пошаговым толчковым передвижениям, однако всегда в первоначальном направлении и ориентации, зарегистрированным при первом воздействии на выключатель.
В другом альтернативном варианте воплощения в состав устройства также входит гироскоп, формирующий сигнал, изменяющийся в зависимости от поворота вокруг одной или более осей, для управления вращательными движениями или для управления прекращением движения.
В другом альтернативном варианте воплощения в состав устройства также входит датчик инерциального типа, позволяющий определять ускорение и движение руки оператора не в системе координат оператора, а в абсолютной системе координат. Такой альтернативный вариант воплощения позволяет интуитивно управлять передвижение независимо от положения оператора относительно управляемого оборудования.
На фиг. 3 показано упрощенное изображение различных сигналов, обрабатываемых устройством.
На верхнем графике показаны примеры сигналов ускорения, зарегистрированных акселерометром по двум направлениям, например:
 одна ось регистрирует движения предплечья в вертикальном направлении "вверх/вниз" и передает сигнал Av 10, показанный сплошной линией, и
одна ось регистрирует движения предплечья в вертикальном направлении "вверх/вниз" и передает сигнал Av 10, показанный сплошной линией, и
одна ось регистрирует движения предплечья в горизонтальном направлении "влево/вправо" и передает сигнал Agd 11, показанный пунктирной линией.
Следующий график соответствует состоянию микровыключателя, при этом уровень 0 соответствует отсутствию воздействия на микровыключатель, а уровень 1 соответствует тому состоянию, в котором пользователь нажимает на микровыключатель. Кривая 12 представляет пример последовательности воздействий на микровыключатель.
На двух последних графиках представлено состояние управления передвижением дистанционно управляемого оборудования, при этом уровень 0 соответствует остановке, а уровни "+1" или "-1" соответствуют направлению передвижения, а также необязательно для каждого направления движения уровень "медленного движения" и "быстрого движения" для двух направлений передвижения;
 подъем-опускание соответствует кривой 13
подъем-опускание соответствует кривой 13
поперечное передвижение тележки соответствует кривой 14.
Для сигналов, поступающих от трехкоординатного акселерометра, учитывается превышение порогового значения, соответствующего кривым 15, 16. Эти кривые предпочтительно соответствуют константам. Они также могут соответствовать переменным, например, основанным на ретроспективных данных, с целью предоставить возможность корректировки типа движения оператора на этапе обучения, или основанным на данных от управляемого оборудования с целью адаптирования чувствительности регистрации движений предплечья к характеру управляемых операций.
Пока микровыключатель находится в состоянии "0", как на последовательности, показанной под номером 20, сигналы 10, 11 акселерометра игнорируются, даже если они превышают пороговое значение 15.
Когда микровыключатель находится в состоянии "1", никаких действий не происходит до тех пор, пока один из сигналов 10, 11 от акселерометров не превысит пороговое значение 15.
Когда микровыключатель находится в состоянии "1" и при этом зарегистрировано превышение порога по одному из сигналов 10 в то же самое время, устройство передает сигнал движения 13, соответствующий тому акселерометру, для которого было зарегистрировано превышение порогового значения. В этом примере последовательность под номером 21 иллюстрирует ситуацию, в которой сигнал Av временно превышает пороговое значение, которое активирует передвижение оборудования типа "подъем-опускание". Это передвижение продолжается и в дальнейшем, несмотря на то, что уровень сигнала Av спадает до значения ниже порогового, до тех пор, пока микроконтроллер не примет состояние "0" на время, превышающее предустановленное время Tfin, например, одну секунду.
Микропрерывания длительностью менее одной секунды не прерывают передачу сигнала управления, однако могут управлять переключением в другой режим работы, например:
 два отдельных микропрерывания длительностью менее Tfin вызывают переключение состояния передвижения из режима медленного движения в режим быстрого движения в том же направлении и с той же ориентацией, которые были активны до этих микропрерываний,
два отдельных микропрерывания длительностью менее Tfin вызывают переключение состояния передвижения из режима медленного движения в режим быстрого движения в том же направлении и с той же ориентацией, которые были активны до этих микропрерываний,
отдельное микропрерывание длительностью менее Tfin приводит к переключению в режим толчкового передвижения.
Последовательность под номером 22 иллюстрирует ситуацию, в которой оператор кратковременно прервал воздействие на микровыключатель, а затем возобновил его, в то время, когда сигнал управления управлял передвижением в направлении "подъем". После этого передвижение продолжается, но с повышенной скоростью.
Последовательность 23 иллюстрирует последовательность, в которой оператор прекратил воздействие на микровыключатель на время, превышающее Tfin. Перемещение управляемого оборудования прекращается по истечении времени Tfin после прекращения воздействия на микровыключатель.
Затем, при следующем нажатии оператора на микровыключатель, устройство возобновляет регистрацию превышения порогового значения 15 одним из сигналов 10, 11 акселерометра для управления новым передвижением управляемого оборудования.
В описанном примере и обозначенным последовательностью 24 первым зарегистрированным сигналом, превысившим пороговое значение, является сигнал 11, который впоследствии активирует поперечное передвижение тележки в соответствии с командой, представленной кривой 14.
Когда оператор кратковременно, на время менее Tfin, прекращает воздействие на микровыключатель, как показано на последовательности 25, он/она запускает «толчковый» режим. В этом режиме при каждом случае превышения порогового значения 15, 16 одним из сигналов 10, 11, поступающих от любой одной из осей акселерометра, устройство управляет передвижением, в соответствующем направлении и с соответствующей ориентацией, короткими импульсами в течение того времени, пока сохраняется воздействие на микровыключатель.
В этом режиме оператор может осуществить точную корректировку положения управляемого оборудования посредством незначительного покачивания предплечьем вдоль любой из осей. Необязательно, в этом режиме дополнительно предусматривается управление изменением пороговых значений 15, 16 для повышения чувствительности устройства на данном этапе точной корректировки.
В соответствии с альтернативным решением, режим "постукивания/толчков" включается, когда оператор кратковременно прекращает воздействие на микровыключатель посредством поворота кисти руки на время менее Tfin. В этом режиме каждое микропрерывание длительностью менее Tfin позволит управлять передвижением в последнем выбранном направлении и с соответствующей последней выбранной ориентацией до тех пор, пока на микровыключатель оказывается воздействие.
Этот режим позволяет оператору осуществить точную корректировку положения управляемого оборудования посредством микропрерываний.
Электронная схема
Электронное оборудование состоит из:
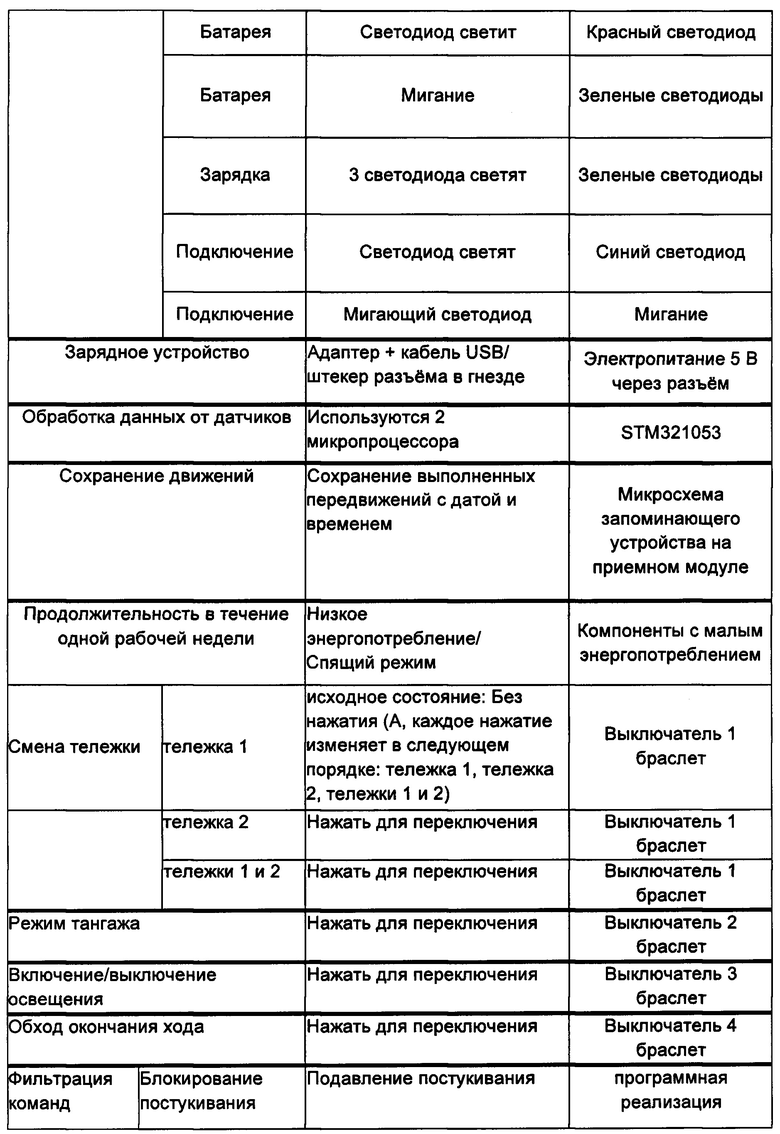
 Двух микроконтроллеров: uP управления и uP безопасности
Двух микроконтроллеров: uP управления и uP безопасности
Одного IMU
Одного модуля аварийной остановки
Одного передающего модуля (субгигагерцового диапазона)
Одной батареи 3,7 В 200 мАч
Одного соединителя (разъема) для подзарядки
Одного соединителя (разъема) для подключения сменной части
 Одного запоминающего устройства (FRAM)
Одного запоминающего устройства (FRAM)
Сменная/одноразовая часть состоит из кольца, в которое встроен сдвоенный выключатель управления. Такое кольцо с выключателем подключается к основному модулю посредством проводного соединения и соединительного средства с подтверждением или определением. Браслет также является сменной/одноразовой частью.
Время автономной работы данных компонентов должно составлять не менее одной недели. Энергопотребление данных компонентов должно быть низким. Для обеспечения максимального удобства пользования все эти элементы объединяются в одной коробке (две коробки для примера) и миниатюризированы.
На фиг. 4 показана блок-схема электронной схемы, содержащей микропроцессор 50, микроконтроллер безопасности 51 и цепь задержки времени 52 типа «сторожевой таймер», позволяющую микропроцессору 50 восстановить контроль в случае сбоя путем подачи внешней команды RESET.
Микропроцессор 50 содержит запоминающее устройство типа флэш с организацией TXFIFO. Он управляет передачей кадра аварийной остановки каждые 10 мс до получения кадра подтверждения АСК (радиосигнал подтверждения, который означает, что сообщение было получено).
Если получен кадр подтверждения АСК, он передает микроконтроллеру безопасности 51 сообщение AU_OK и ожидает окончания аварийной остановки.
Когда аварийная остановка заканчивается, он информирует микроконтроллер безопасности 51 и модуль аварийной остановки мостового крана об окончании аварийного состояния и переключается на широковещательную частоту.
Микроконтроллер безопасности 51 конфигурирует цепь задержки времени 52 на 100 мс. Когда аварийная остановка закончена, он заново конфигурирует цепь задержки времени 52 на 550 мс и переключается в режим ожидания.
Используются две шины SPI: поскольку кадр передается каждые 250 мс, то, если шина SPI занята обменом данных с блоком IMU, для начала передачи необходимо ожидать завершения получения данных.
Порт GPIO (универсальный порт ввода-вывода) выполняет следующие функции:
 сообщение о начале и окончании управления (управление при нормальной скорости)
сообщение о начале и окончании управления (управление при нормальной скорости)
сообщение о повышенной скорости
сброс
аварийная остановка
 светодиод: индикация связи с мостовым краном
светодиод: индикация связи с мостовым краном
Связь между микроконтроллером безопасности 51 и системой управления осуществляется по трем портам:
 один порт, работающий в режиме прерывания, для сообщения, что команда достигла uPS
один порт, работающий в режиме прерывания, для сообщения, что команда достигла uPS
два порта для передачи команды
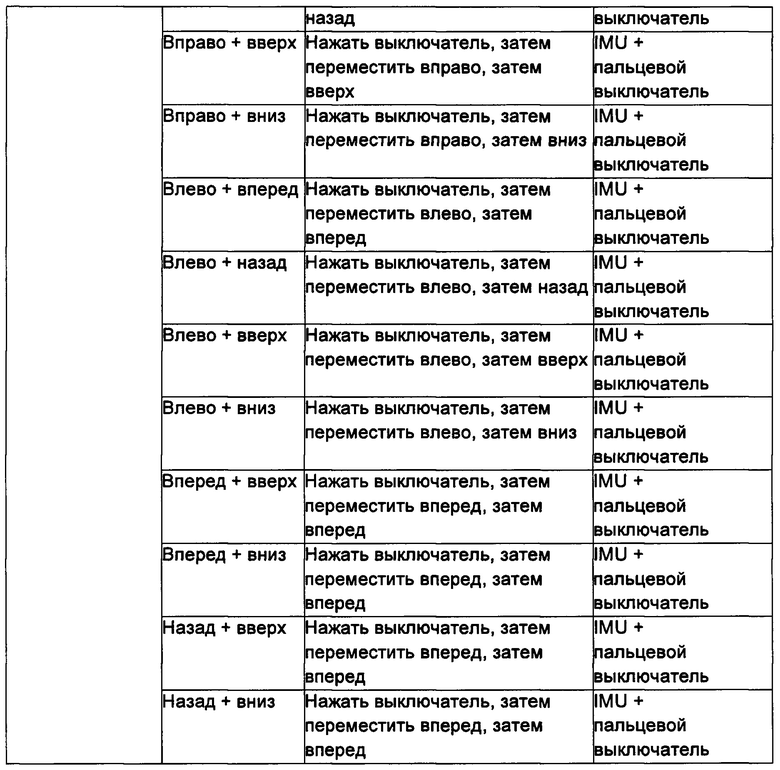
Предусматриваются следующие команды:
 сброс цепи задержки времени 52, нормальное функционирование = 1
сброс цепи задержки времени 52, нормальное функционирование = 1
Отключение 2
Повторное включение 3
Подтверждение аварийной остановки 4
Отсутствие команды 0
Мостовой кран
Мостовой кран начинает работу в режиме приема на рабочей частоте (широковещательной). Он принимает все передаваемые ему кадры.
При приеме кадра:
он передает подтверждение
 он передает кадр, содержащий его частоту связи
он передает кадр, содержащий его частоту связи
 При получении подтверждения он переключается на частоту связи в режим приема.
При получении подтверждения он переключается на частоту связи в режим приема.
Активирует STN при 500 мс и инициализирует переменную STATE=0
Переменная STATE увеличивается на единицу при каждом приеме, и обрабатывается команда
 По истечении периода времени 500 мс:
По истечении периода времени 500 мс:
 Если STATE=0 (в течение 500 мс не принято ни одного кадра), прекращает текущие команды и переключается на рабочую частоту.
Если STATE=0 (в течение 500 мс не принято ни одного кадра), прекращает текущие команды и переключается на рабочую частоту.
Если STATE>0, (прием, по меньшей мере, одного кадра), сброс переменной STATE в 0
Подробное описание команд
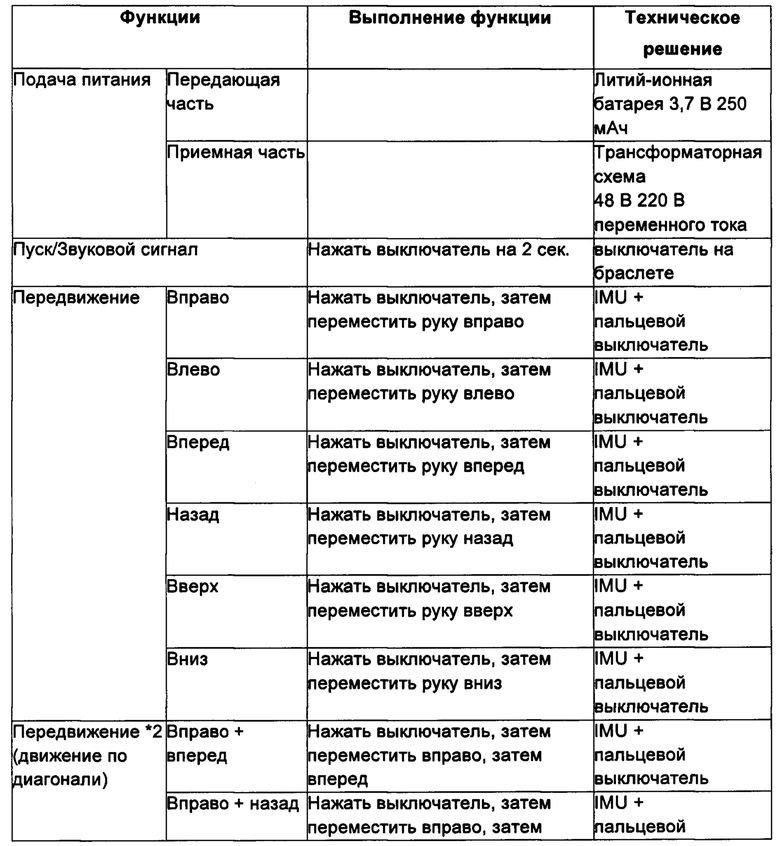
Функциональное описание
Первым этапом является стадия запуска и настройки перчатки.
Система начинает работу на частоте, выделенной для оборудования. Адрес приемной части кодируется при изготовлении или сохраняется при выполнении процедуры идентификации (RFID и т.п.) и сопряжения.
Для сохранения энергии микроконтроллер безопасности переходит в спящий режим. Перчатка выходит из спящего режима по сигналу, принятому по командному интерфейсу.
Следующим этапом является стадия соединения:
После получения адреса перчатка передает запрос на соединение с мостовым краном. Мостовой кран передает сообщение о своей готовности и частоту, используемую для связи (свою рабочую частоту). Если кран не отвечает, перчатка повторно передает запрос через случайное время ожидания для предотвращения коллизии.
После получения информации о соединении подается команда на переконфигурирование радиосоединения.
В случае сбоя при установлении соединения (кран уже используется, проблемы с радиосвязью) подается команда на возврат на широковещательную частоту.
После установления соединения:
Перчатка начинает передачу кадра каждые 250 мс в течение заданного времени ТНМ (времени отсутствия оператора), при этом передача повторяется 3 раза. После этого пользователь может приступать к управлению мостовым краном. В случае необходимости предусматривается кнопка запуска системы, которая позволяет пользователю переходить от одного крана к другому, не ожидая истечения 5-минутного интервала (время отсутствия оператора). При нажатии на AU производится перезагрузка системы, что позволяет напрямую переключиться к исходной конфигурации, т.е., на широковещательную частоту.
Стадия управления (перчатка):
Пользователь нажимает на кнопку, выражая свое намерение управлять машиной
 Если перчатка еще не присоединена, то выполняется стадия соединения.
Если перчатка еще не присоединена, то выполняется стадия соединения.
После этого осуществляется активация стадии сбора данных
 Активация интерфейса человек-машина IMU
Активация интерфейса человек-машина IMU
Считывание данных
Идентификация движения и обновление кадра.
 Обновление значения переменной, указывающей надлежащее функционирование этой части
Обновление значения переменной, указывающей надлежащее функционирование этой части
 Каждые 250 мс вышеописанный этап прерывается для передачи кадра с целью поддержания рабочего соединения.
Каждые 250 мс вышеописанный этап прерывается для передачи кадра с целью поддержания рабочего соединения.
Команда будет включена во все кадры до тех пор, пока пользователь не отпустит кнопку.
 После отпускания кнопки
После отпускания кнопки
 Обновление кадра
Обновление кадра
Сброс времени отсутствия оператора для запуска нового цикла
Остановка при отсутствии оператора
По истечении «времени отсутствия оператора»
 Передающая часть (перчатка)
Передающая часть (перчатка)
 Возврат на широковещательную частоту
Возврат на широковещательную частоту
Уведомление блока безопасности (микроконтроллер безопасности)
переходе в состояние нормального отсутствия функционирования,
 Управление электропитанием и переход в спящий режим, выход из спящего режима по сигналу GPIO (кнопка пользователя)
Управление электропитанием и переход в спящий режим, выход из спящего режима по сигналу GPIO (кнопка пользователя)
 Приемная часть (мостовой кран)
Приемная часть (мостовой кран)
 Остановка мостового крана в случае передвижения
Остановка мостового крана в случае передвижения
Возврат к широковещательной частоте
Остановка в связи со сбоем при передаче
 Передающая часть (перчатка)
Передающая часть (перчатка)
 Действие не требуется, микроконтроллер безопасности выполняет сброс системы. Перчатка выполняет стадию запуска и напрямую переключается на широковещательную частоту.
Действие не требуется, микроконтроллер безопасности выполняет сброс системы. Перчатка выполняет стадию запуска и напрямую переключается на широковещательную частоту.
 Приемная часть (мостовой кран)
Приемная часть (мостовой кран)
 Прекращение выполнения всех текущих команд
Прекращение выполнения всех текущих команд
Переключение на широковещательный канал
Аварийная остановка
 Пользователь нажимает на кнопку аварийной остановки.
Пользователь нажимает на кнопку аварийной остановки.
Система передает кадр аварийной остановки каждые 20 мс до получения подтверждения.
 Мостовой кран остается на рабочей частоте, и связанным с тем браслетом, который инициировал аварийную остановку. Другие пользователи не могут использовать этот кран
Мостовой кран остается на рабочей частоте, и связанным с тем браслетом, который инициировал аварийную остановку. Другие пользователи не могут использовать этот кран
Все кадры, за исключением кадра, прекращающего аварийную остановку, игнорируются приемной частью
После получения кадра, прекращающего аварийную остановку, мостовой кран остается на рабочей частоте для нормального функционирования
На приемной части предусматривается звуковой сигнал, чтобы пользователь не переключил мостовой кран в режим аварийной остановки, а затем покинул место работы, что сделает невозможным эксплуатацию этого мостового крана другими пользователями.
 Для случае сбоя радиосвязи на мостовом кране предусматривается кнопка аварийной остановки.
Для случае сбоя радиосвязи на мостовом кране предусматривается кнопка аварийной остановки.
Альтернативные варианты воплощения
У настоящего изобретения могут быть различные альтернативные варианты воплощения.
Ориентация пользователя в пространстве.
Настоящее изобретение может быть реализовано в двух режимах работы.
В первом режиме устройство управляет передвижением по направлению взгляда оператора. При перемещении его/ее руки вправо, управляемое передвижение направлено в правую сторону от оператора, независимо от его/ее положения относительно управляемого оборудования.
Во втором варианте воплощения устройство управляет передвижением по направлению взгляда оператора. При перемещении его/ее руки вправо, управляемое передвижение направлено в правую сторону от оборудования, независимо от его/ее положения относительно управляемого оборудования.
В состав устройства дистанционного управления может входить датчик положения оператора в абсолютной системе координат, например, относительно географического севера, или датчик относительного положения оператора относительно системы координат, связанной с управляемым оборудованием.
Геолокация
На удаленном оборудовании могут быть предусмотрены средства геолокации для идентификации положения пользователя относительно управляемого оборудования с целью обеспечить возможность различать нескольких операторов, каждый из которых управляет какой-либо единицей оборудования в общей зоне, например, на площадке, в границах которой работают несколько единиц оборудования, а также ограничить дальность использования. Для того чтобы иметь возможность управлять, например, мостовым краном, оператор должен находиться в пределах 40 метров от него, нахождение на большем расстоянии может быть небезопасным (недостаточная видимость).
Возможность применения оборудования
В состав оборудования могут входить средства для сохранения характеристик, специфичных для управляемого оборудования. В дальнейшем "функциональный" микроконтроллер адаптируется к различным соседним подъемным устройствам.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ МАШИНОЙ СО СТРЕЛОВЫМ ОБОРУДОВАНИЕМ | 2017 |
|
RU2642026C1 |
| Тренажер с биологической обратной связью для реабилитации суставов кистей и пальцев рук и способ его работы | 2019 |
|
RU2720323C1 |
| КРАН ДЛЯ ОБРАЩЕНИЯ С ОТРАБОТАВШИМ ЯДЕРНЫМ ТОПЛИВОМ В ЗАЩИТНОЙ КАМЕРЕ | 2007 |
|
RU2352516C1 |
| СТРОИТЕЛЬНАЯ МАШИНА | 2017 |
|
RU2736896C2 |
| СТРОИТЕЛЬНАЯ МАШИНА | 2017 |
|
RU2754118C2 |
| Тренажер с биологической обратной связью для реабилитации суставов и мышц кистей и пальцев рук | 2020 |
|
RU2735986C1 |
| СИСТЕМА УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНОЙ МАШИНЫ (ВАРИАНТЫ) | 2008 |
|
RU2376238C1 |
| Система дистанционного управления строительной машиной | 2023 |
|
RU2817073C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ ПЕРЧАТКА ДЛЯ ВОДИТЕЛЯ ТРАНСПОРТА, ПРЕПЯТСТВУЮЩАЯ ДРЕМОТЕ ЗА РУЛЕМ | 2011 |
|
RU2455694C1 |
| Роботизированное устройство тренажера для реабилитации конечностей и способ его применения | 2021 |
|
RU2766754C1 |
Предложено устройство дистанционного управления, которое содержит электронную схему, содержащую средство для регистрации положения, ориентации и движения кисти руки и/или предплечья, такое как акселерометр, средство для передачи на радиочастоте сигнала управления, вычисленного в зависимости от зарегистрированных положения, ориентации и движения, а также средство для крепления на предплечье оператора. Дополнительно устройство дистанционного управления содержит выключатель (7), выполненный с возможностью приведения его в действие двумя пальцами. Выключатель (7) управляет включением указанной электронной схемы и поддержанием сигнала управления, пока воздействие на указанный выключатель (7) не прекратится. Также устройство дистанционного управления содержит опорную поверхность (4), связанную с выключателем, управляющим аварийной остановкой козлового крана. Достигается повышение удобства управления, повышение эргономичности. 14 з.п. ф-лы, 4 ил., 1 табл. 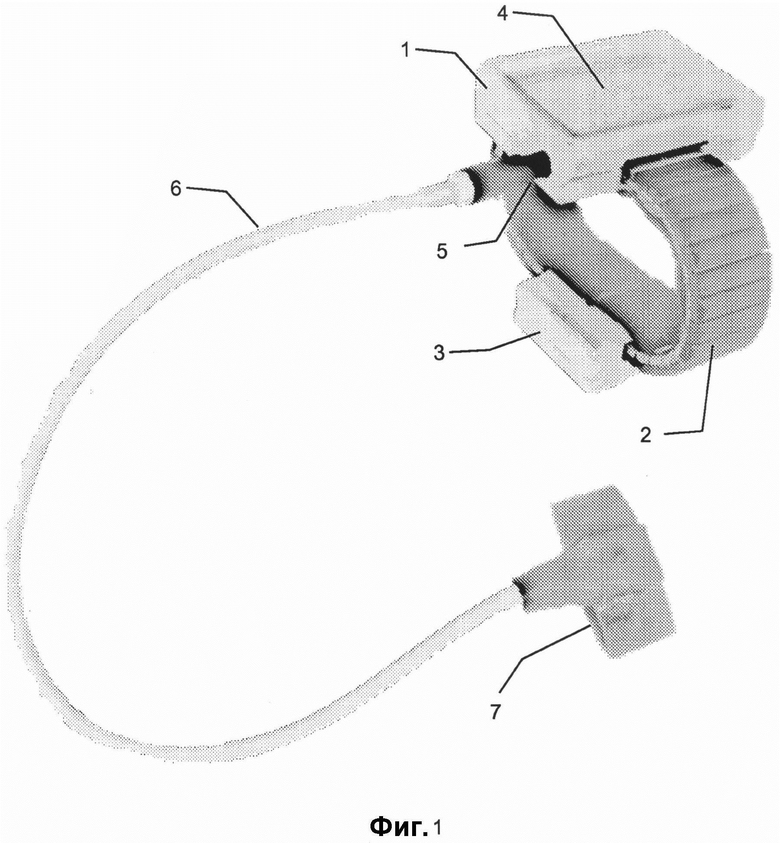
1. Устройство дистанционного управления, включающее электронную схему, содержащую средство для регистрации положения, ориентации и движения кисти руки и/или предплечья такое как акселерометр, средство для передачи на радиочастоте сигнала управления, вычисленного в зависимости от зарегистрированных положения, ориентации и движения, а также средство для крепления на предплечье оператора, отличающееся тем, что оно дополнительно содержит выключатель (7), выполненный с возможностью приведения его в действие двумя пальцами, указанный выключатель (7) управляет включением указанной электронной схемы и поддержанием сигнала управления, пока воздействие на указанный выключатель не прекратится, а также опорную поверхность, связанную с выключателем, управляющим аварийной остановкой управляемого оборудования.
2. Устройство дистанционного управления по п. 1, отличающееся тем, что указанная электронная схема содержит пороговый детектор для генерирования сигнала управления, когда сигнал, измеренный указанным средством регистрации, превышает пороговое значение, а также для поддержания такого сигнала управления, пока воздействие на указанный выключатель (7) не прекратится.
3. Устройство дистанционного управления по п. 1 или 2, отличающееся тем, что оно состоит из комплементарных модулей, включающих браслет (2), коробку (1), содержащую электронную схему и средство регистрации, а также выключатель (7), выполненный с возможностью размещения на пальце.
4. Устройство дистанционного управления по любому из предшествующих пунктов, отличающееся тем, что оно содержит акселерометр, регистрирующий ускорения вдоль трех перпендикулярных осей.
5. Устройство дистанционного управления по любому из предшествующих пунктов, отличающееся тем, что оно содержит гироскоп, регистрирующий вращения в трех направлениях.
6. Устройство дистанционного управления по любому из предшествующих пунктов, отличающееся тем, что оно дополнительно содержит магнитометр для регистрации магнитной ориентации.
7. Устройство дистанционного управления по любому из предшествующих пунктов, отличающееся тем, что оно дополнительно содержит инерциальный блок, состоящий из одного акселерометра с тремя перпендикулярными осями, гироскопа с тремя осями вращения и трехкоординатного магнитометра.
8. Устройство дистанционного управления по любому из предшествующих пунктов, отличающееся тем, что указанный инерциальный блок регистрирует угол наклона, ориентацию и ускорения вдоль трех перпендикулярных осей.
9. Устройство дистанционного управления по любому из предшествующих пунктов, отличающееся тем, что оно дополнительно содержит кнопку аварийной остановки.
10. Устройство дистанционного управления по любому из предшествующих пунктов, отличающееся тем, что оно дополнительно включает в себя один соединитель на коробке, предназначенный для подключения напальчника и зарядного устройства.
11. Устройство дистанционного управления по любому из предшествующих пунктов, отличающееся тем, что оно дополнительно содержит второй выключатель, установленный в электрической схеме и предназначенный для управления посредством второй руки.
12. Устройство дистанционного управления по любому из предшествующих пунктов, отличающееся тем, что оно дополнительно содержит множество выключателей для выбора управляемого оборудования или одной из функций управляемого оборудования.
13. Устройство дистанционного управления по любому из предшествующих пунктов, отличающееся тем, что оно содержит выключатель (7), являющийся цифровым, плавным или двухпозиционным.
14. Устройство дистанционного управления по любому из предшествующих пунктов, отличающееся тем, что оно дополнительно содержит средство для управления режимом постукивания в соответствии с сохраненным последним направлением, зарегистрированным акселерометром и/или инерциальным блоком, и повторенными воздействиями на выключатель (7).
15. Устройство дистанционного управления по любому из предшествующих пунктов, отличающееся тем, что оно дополнительно содержит средство для управления передвижением с двумя скоростями.
| ВСПОМОГАТЕЛЬНАЯ СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ПОГРУЗОЧНО-РАЗГРУЗОЧНОЙ МАШИНОЙ И СПОСОБЫ ЕЕ ЭКСПЛУАТАЦИИ | 2007 |
|
RU2428744C2 |
| УЛУЧШЕННОЕ БЕСПРОВОДНОЕ УСТРОЙСТВО УПРАВЛЕНИЯ | 2002 |
|
RU2339087C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ КУРСОРОМ | 2003 |
|
RU2319998C2 |

