Область техники
[0001] Настоящее изобретение относится к защите электронных систем автомобиля от несанкционированного доступа.
Уровень техники
Современный автомобиль обычно имеет много, например, вплоть до семидесяти, электронных блоков управления (ЭБУ) для различных систем и подсистем. Наиболее мощным ЭБУ в отношении мощности обработки обычно является блок управления двигателем. Другие ЭБУ используются для трансмиссии, подушек безопасности, антиблокировочного торможения/ABS, круиз-контроля, рулевого управления с электроусилителем, аудиосистем, электростеклоподъемников, дверей, регулировки зеркал, аккумуляторной батареи и систем перезарядки для гибридных и электрических автомобилей и т.д. Некоторые из этих ЭБУ образуют независимые подсистемы, но, тем не менее, связи между ЭБУ являются в общем необходимыми.
[0002] Был разработан стандарт шины локальной сети контроллеров (CAN), и он хорошо известен тем, что позволяет микроконтроллерам, таким как в ЭБУ и других устройствах в транспортном средстве, осуществлять связь друг с другом в приложениях без главного компьютера. CAN представляет собой протокол на основе сообщений, спроектированный изначально для автомобильных приложений, но также используется во многих других контекстах. Шина CAN использует последовательную связь для отправки и приема сообщений. Последовательная связь относится к процессу отправки данных по одному биту за единицу времени последовательно по каналу связи, такому как шина связи транспортного средства.
[0003] Спуфинг (доступ путем обмана, spoofing) представляет собой ситуацию, в которой вычислительная единица и/или программа успешно маскируется под другую путем фальсификации данных, и тем самым получая незаконный доступ к системе или сети. Спуфинг сообщения по шине связи транспортного средства обычно включает в себя маскировку под модуль ЭБУ и размещение сообщений на шине связи транспортного средства так, как если бы маскирующийся модуль ЭБУ был законным источником сообщения. Маскирующийся модуль ЭБУ может отправлять сообщения на шину. Приемные модули на шине могут действовать в соответствии с сообщениями, не зная их истинного источника. Последствия транспортного средства, действующего в соответствии с обманными (спуфинговыми) сообщениями, могут быть серьезными.
Краткое изложение существа изобретения
Согласно одному аспекту изобретения предложен способ предотвращения спуфинга в автомобильной сети, причем способ содержит этапы, на которых: хранят по меньшей мере один адрес первого электронного блока управления транспортного средства; обнаруживают по меньшей мере одно сообщение от множества вторых электронных блоков управления по шине связи транспортного средства, причем по меньшей мере одно сообщение имеет исходящий адрес, который соответствует по меньшей мере одному адресу электронного блока управления; определяют, что упомянутое по меньшей мере одно сообщение передавали с помощью источника, отличного от электронного блока управления; и генерируют и передают сообщение отрицательного квитирования (NACK) по меньшей мере одному модулю на шине в автомобильной сети, передающее команду множеству вторых электронных блоков управления не предпринимать никаких действий по упомянутому по меньшей мере одному сообщению.
Согласно одному варианту осуществления способа обнаружение выполняют с помощью программы контроля, исполняемой процессором электронного блока управления.
Согласно другому варианту осуществления способа обнаружение выполняют с помощью матрицы дискретных логических вентилей.
Согласно другому варианту осуществления способа шина связи транспортного средства является частью сети транспортного средства, которая включает в себя беспроводную сеть.
Согласно другому варианту осуществления способ дополнительно содержит этап, на котором приводят злоумышленника в состояние отключения от шины после приема предварительно определенного числа NACK.
Согласно другому варианту осуществления способа по меньшей мере одно сообщение включает в себя данные датчика.
Согласно другому варианту осуществления способа электронный блок управления определяет, что по меньшей мере одно сообщение передавали с помощью источника, отличного от электронного блока управления, с помощью контроля по меньшей мере одного передаваемого сообщения электронного блока управления.
Согласно другому варианту осуществления способа по меньшей мере один адрес электронного блока управления является динамическим.
Согласно другому аспекту изобретения предложена система для предотвращения спуфинга в автомобильной сети, содержащая: электронный блок управления, включающий в себя процессор; приложение, исполняемое процессором, причем приложение выполнено с возможностью осуществления: обнаружения по меньшей мере одного сообщения от множества электронных блоков управления по шине в автомобильной сети, и причем по меньшей мере одно сообщение имеет исходящий адрес, который соответствует по меньшей мере одному адресу электронного блока управления; определения, что упомянутое по меньшей мере одно сообщение было передано с помощью источника, отличного от электронного блока управления; и генерации и передачи сообщения NACK по меньшей мере одному модулю на шине в автомобильной сети, передающего команду множеству электронных блоков управления не предпринимать никаких действий по упомянутому по меньшей мере одному сообщению.
Согласно одному варианту осуществления системы автомобильная сеть представляет собой беспроводную сеть.
Согласно другому варианту осуществления система дополнительно содержит приведение злоумышленника в состояние отключения от шины после приема предварительно определенного числа NACK.
Согласно другому варианту осуществления системы сообщения передаются в ответ на датчик.
Согласно другому варианту осуществления системы приложение определяет по меньшей мере один адрес электронного блока управления с помощью контроля по меньшей мере одного передаваемого сообщения электронного блока управления.
Согласно другому варианту осуществления системы по меньшей мере один адрес электронного блока управления является динамическим.
Согласно еще одному аспекту изобретения предложен компьютерный программный продукт для предотвращения спуфинга в автомобильной сети, причем компьютерный программный продукт содержит некратковременный компьютерный носитель данных, имеющий инструкции, реализованные в нем, которые при исполнении процессором электронного блока управления предписывают электронному блоку управления осуществлять: обнаружение по меньшей мере одного сообщения от множества электронных блоков управления по шине в автомобильной сети, и причем по меньшей мере одно сообщение имеет исходящий адрес, который соответствует по меньшей мере одному адресу электронного блока управления; определение, что упомянутое по меньшей мере одно сообщение было передано источником, отличным от электронного блока управления; и генерацию и передачу сообщения NACK по меньшей мере одному модулю на шине в автомобильной сети, передающего команду множеству электронных блоков управления не предпринимать никаких действий по упомянутому по меньшей мере одному сообщению.
Согласно одному варианту осуществления компьютерного программного продукта автомобильная сеть представляет собой беспроводную сеть.
Согласно другому варианту осуществления компьютерного программного продукта автомобильная сеть соединена с телематическим блоком.
Согласно другому варианту осуществления компьютерного программного продукта сообщения передаются в ответ на датчик.
Согласно другому варианту осуществления компьютерный программный продукт определяет по меньшей мере один адрес электронного блока управления с помощью контроля по меньшей мере одного передаваемого сообщения электронного блока управления.
Согласно другому варианту осуществления компьютерного программного продукта по меньшей мере один адрес электронного блока управления является динамическим.
Краткое описание чертежей
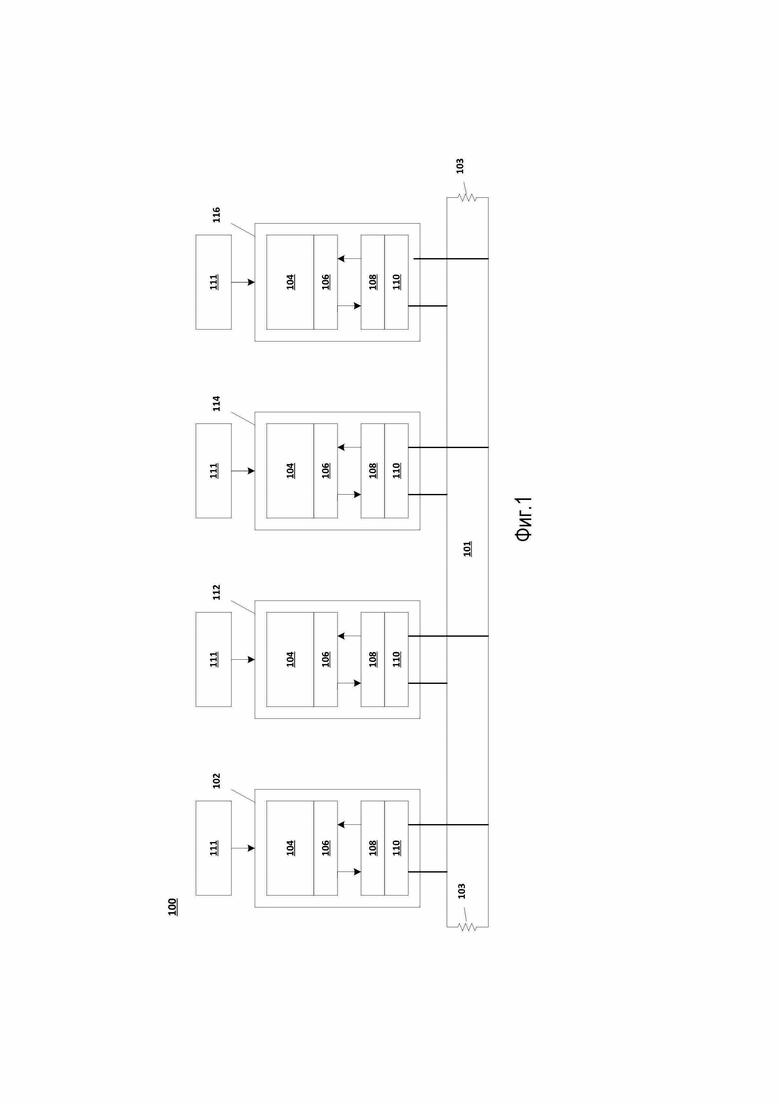
[0004] Фигура 1 представляет собой блок-схему примерной системы антиспуфинга шины транспортного средства.
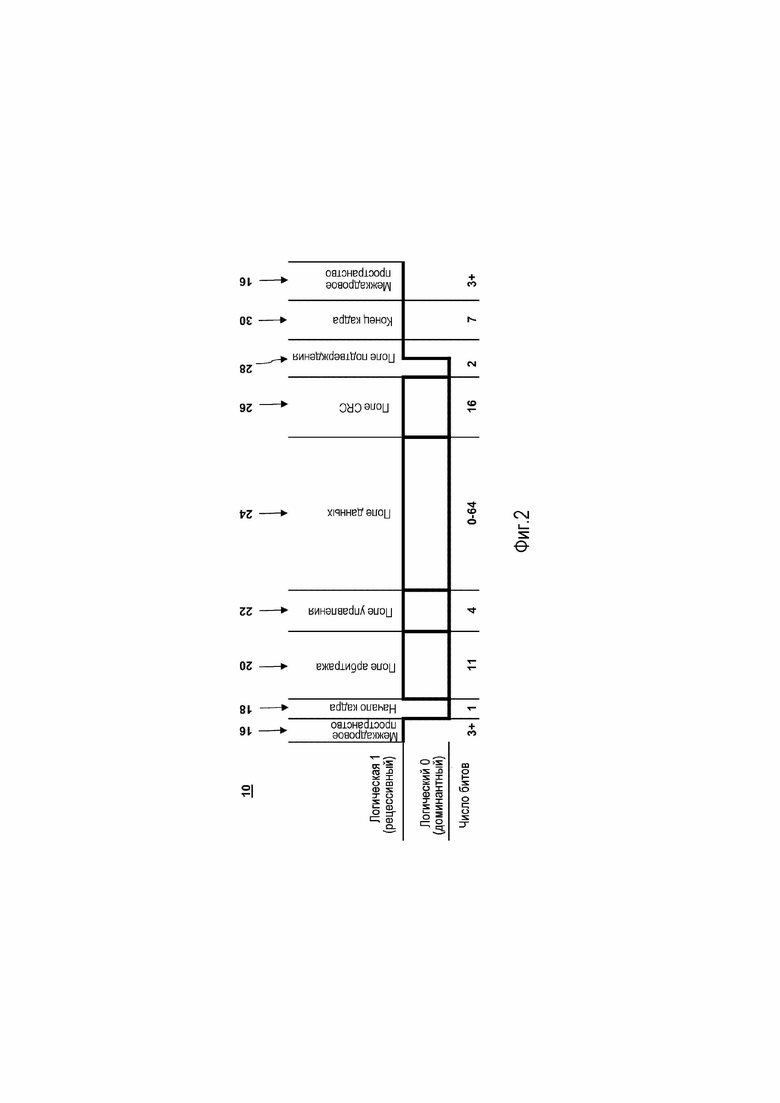
[0005] Фигура 2 представляет собой вид, показывающий примерный кадр последовательного протокола связи.
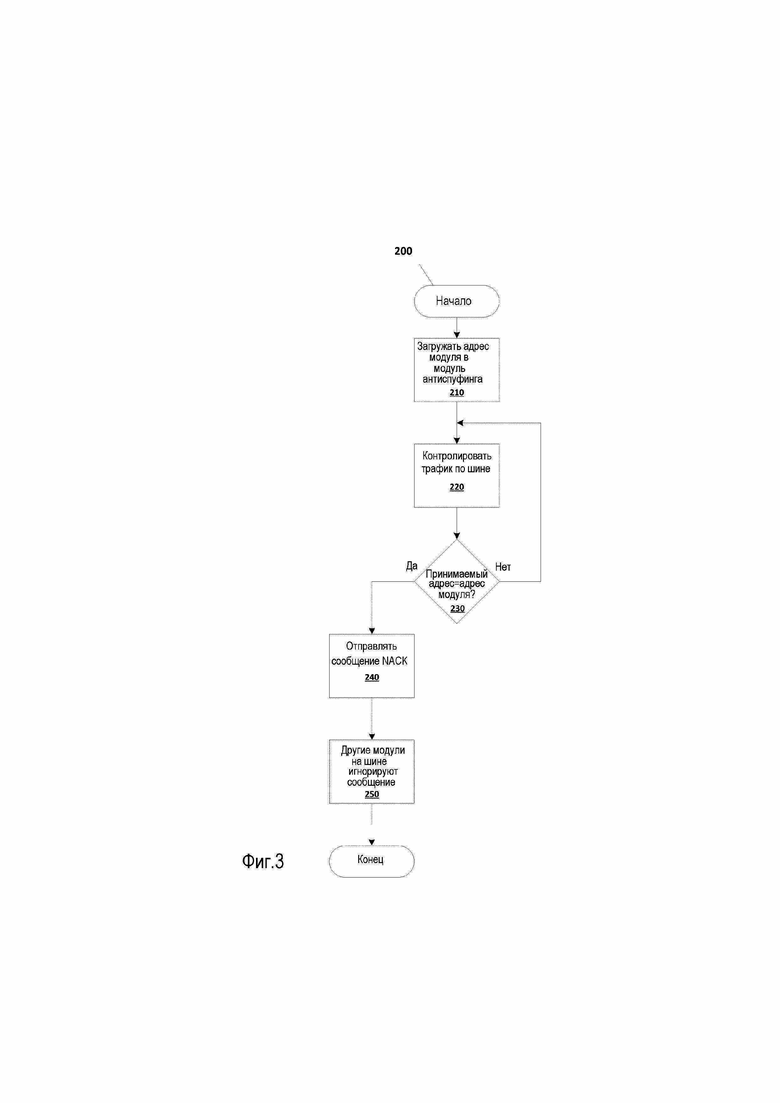
[0006] Фигура 3 представляет собой блок-схему процесса, иллюстрирующую примерный процесс для системы на Фигуре 1.
Подробное описание
[0007] Фигура 1 представляет собой блок-схему примерной системы 100 антиспуфинга шины транспортного средства. Датчик 111 соединен с электронным блоком 102 управления (ЭБУ), например, известным образом. ЭБУ 102 имеет контроллер 104, который находится в связи с контроллером 106 связи. Контроллер 106 связи соединен с модулем 108 антиспуфинга. Модуль 108 антиспуфинга коммуникативно связан с коммуникационным приемопередатчиком 110. Коммуникационный приемопередатчик 110, в свою очередь, коммуникативно связан с шиной 101 автомобильной сети. Шина 101 имеет оконечный резистор 103 полного сопротивления на каждом конце шины 101.
[0008] Контроллер 104 может включать в себя один или более процессоров, таких как микропроцессоры или микроконтроллеры. Контроллер 104 также может иметь память, такую как постоянное запоминающее устройство (ROM), для хранения инструкций, подлежащих исполнению процессором, и память с произвольным доступом (RAM) для временного хранения данных или сохранения информации регистра. ЭБУ 102 может использовать микропроцессоры для обработки показания датчика от датчика 111 (например, датчиков двигателя, таких как датчики впрыска топлива, устройств отсчета времени, датчиков кислорода, датчиков охлаждающей жидкости, датчиков впуска воздуха и т.д.) и, в ответ, передачи этой информации другим компонентам транспортного средства, таким как ЭБУ 112, ЭБУ 114 и ЭБУ 116 или устройствам, например, подсветкам приборов, подсветкам транспортного средства, гудкам и т.п. в транспортном средстве согласно их соответственным функциям. Каждый ЭБУ должен иметь уникальный адрес при соединении с шиной 101 для исключения путаницы. Например, ЭБУ 102, ЭБУ 112, ЭБУ 114 и ЭБУ 116 могут иметь уникальные шестнадцатеричные адреса ЭБУ 1A0h, 2B0h, 3AFh и 008h соответственно.
[0009] Контроллер 106 связи может представлять собой, например, контроллер локальной сети контроллеров (CAN) и часто представляет собой целую часть процессора контроллера 104. Контроллер 104 связи может содержать процессор для исполнения инструкций. При приеме данных контроллер 106 связи хранит принятые последовательные биты, которые он принимает от шины 101, до тех пор, пока все сообщение не станет доступным. Сообщение может далее извлекаться процессором контроллера 104. Контроллер связи может запускать прерывание в процессоре контроллера 104, оповещающее процессор о том, что было принято новое сообщение. При отправке данных процессор контроллера 104 отправляет сообщения, подлежащие размещению на шине 101, с помощью контроллера 106 связи.
[0010] Модуль 108 антиспуфинга расположен между контроллером 106 связи и коммуникационным приемопередатчиком 110. Функциональность модуля антиспуфинга может быть осуществлена в аппаратном обеспечении, программном обеспечении или их сочетании. Примеры осуществления модуля 108 антиспуфинга рассмотрены ниже. При работе модуль 108 антиспуфинга контролирует шину 101 с помощью коммуникационного приемопередатчика 110 и обнаруживает, когда принятое сообщение по шине 101 имеет исходящий адрес, который соответствует выходному адресу ЭБУ 102, и принятое сообщение не отправлялось ЭБУ 102. Модуль 108 антиспуфинга будет немедленно отправлять последовательность из шести последовательных доминантных битов шине 101 с помощью коммуникационного приемопередатчика 110 до того, как спуфинговое сообщение сможет завершиться, таким образом, отвергая спуфинговое сообщение (дополнительно рассмотрено ниже). Шесть битов содержат «Активный флаг ошибки» согласно стандарту шины CAN, который представляет собой активный флаг ошибки и образует сообщение отрицательного квитирования (NACK) от ЭБУ 102, информируя любые модули на шине 101 о том, что было принято спуфинговое сообщение. Предпочтительно, сообщение NACK ЭБУ 102 будет заставлять модули на шине 101 игнорировать это спуфинговое сообщение.
[0011] Как известно, передачи данных шины CAN используют способ побитового арбитража без потерь для устранения конфликтов. Этот способ арбитража требует синхронизации всех узлов в сети CAN для отбора каждого бита в сети CAN по существу одновременно. Спецификации CAN используют термины «доминантные» биты и «рецессивные» биты следующим образом. Доминантный представляет собой логический 0 (активно приводимый к напряжению передатчиком), а рецессивный представляет собой логическую 1 (пассивно возвращаемую к напряжению резистором). Состояние простоя представлено рецессивным уровнем (логическая 1). Если один узел передает доминантный бит, а другой узел передает рецессивный бит, в этом случае происходит коллизия, и доминантный бит «побеждает». Это значит, что отсутствует задержка до сообщения более высокого приоритета, и узел, передающий сообщение более низкого приоритета, автоматически пытается повторно передавать шестибитные тактовые циклы после окончания доминантного сообщения. Это делает CAN весьма пригодной в качестве системы связи с приоритетами в реальном времени.
[0012] Фигура 2 представляет собой временную диаграмму кадра 10 данных последовательной шины связи. Столбцы представляют различные поля в кадре 10 данных. Состояния данных Логическая 1 (Рецессивный) и Логический 0 (Доминантный) представлены по оси y вместе с числом битов для каждого столбца. Кадр 10 данных отделен от предыдущих кадров битовым полем, называемым межкадровым пространством 16. Межкадровое пространство 16 состоит из по меньшей мере трех последовательных рецессивных (1) битов. Если доминантный бит (0) обнаружен после межкадрового пространства 16, он будет рассматриваться в качестве начала бита 18 кадра. Следующий столбец представляет собой поле 20 арбитража, состоящее из 11 битов, и будет рассмотрен ниже. После поля 20 арбитража представлено поле 22 управления, состоящее из четырех битов, которое указывает на число байтов в поле 24 данных. Поле 24 данных содержит отправляемые данные и может составлять от нуля до восьми байтов по длине. Поле 26 CRC представляет собой 16-битное поле циклического избыточного кода для обнаружения любых данных и исправления ошибок данных. Исправление CRC составляет пятнадцать битов, при этом шестнадцатый бит является рецессивным (1) битом. Поле 28 подтверждения составляет два бита. Поле 30 конца кадра составляет семь рецессивных (1) битов и используется для обозначения конца кадра 10 данных.
[0013] Поле 20 арбитража аналогично полю адреса, но так как шина CAN является полуасинхронной, любой ЭБУ на шине может передавать в любой момент времени, что может вызывать проблемы конфликта на шине. Некоторым ЭБУ будет необходимо иметь приоритет над другими модулями. Например, ЭБУ тормозной системы будет необходимо иметь приоритет над развлекательным ЭБУ. Будет использоваться способ побитового арбитража устранения конфликтов, рассмотренный выше, и ЭБУ тормозной системы будет присвоен адрес шины с более низким числовым значением. Так как значение адресов более низкого порядка является доминирующим над более высоким значением адресов, ЭБУ тормозной системы будет доминировать над развлекательным ЭБУ.
[0014] При приеме данных от шины 101 коммуникационный приемопередатчик 110 преобразует и накапливает уровни сигнала потока данных от шины 101 до уровней сигнала, которые у модуля 108 антиспуфинга. При передаче коммуникационный приемопередатчик 110 преобразует поток данных от модуля 108 антиспуфинга до уровней шины 101. Например, уровни сигнала на шине CAN могут находиться в диапазоне от -3 Вольт до +32 Вольт, и контроллер модуля 108 антиспуфинга может применять TTL логику (транзисторно-транзисторную логику) и может быть способен обрабатывать колебание напряжения не более чем от 0 до +5 Вольт. Коммуникационный приемопередатчик 110, например, приемопередатчик CAN, будет преобразовывать передаваемые и принимаемые сигналы данных в подходящие уровни напряжения сигнала. В дополнение, приемопередатчик CAN должен быть способен подавлять любые временные всплески напряжения от -150 Вольт до +100 Вольт.
[0015] Шина 101 может быть осуществлена с использованием любого пригодного типа конфигурации сети. Например, в одном варианте выполнения шина 101 может работать с использованием стандартных протоколов, таких как протоколы локальной сети контроллеров (CAN). В качестве не ограничивающих примеров, шина 101 может быть осуществлена в виде одного провода или может представлять собой два провода (например, витую пару), которые передают сообщения от одного ЭБУ другому ЭБУ и другим требуемым компонентам транспортного средства. В других не ограничивающих примерах шина 101 может быть осуществлена с использованием коаксиального кабеля или оптоволоконного кабеля или может быть осуществлена по беспроводной связи с использованием радиочастотной сигнализации. Дополнительно, шина 101 может быть осуществлена с использованием любой пригодной топологии сети, известной в уровне техники, такой как топология от точки к точке, звезда, шина, кольцо, сетка, дерево, цепочка и т.д.
[0016] Шина 101 также может быть соединена с телематическим блоком, чтобы разрешать внешним ЭБУ соединяться с шиной 101 внутренней сети транспортного средства по телекоммуникационной связи. Телематический блок, который известен, может отправлять, принимать и хранить информацию с помощью телекоммуникационных устройств в отношении различных компонентов транспортного средства, таких как датчики, контрольно-измерительные приборы, статус и связи беспроводной сети, дорожные условия, дорожная безопасность и т.д.
[0017] В одном примере модуль 108 антиспуфинга может быть осуществлен с помощью матрицы дискретных логических вентилей. Адрес ЭБУ может быть аппаратно включен в модуль 108 антиспуфинга, и когда принятый адрес соответствует адресу передачи ЭБУ, логический контур может отправлять сообщение NACK, заставляя любые модули на шине 101 игнорировать спуфинговое сообщение. Логический вентиль, который известен, представляет собой элементарный компоновочный блок цифрового контура.
[0018] Согласно другому примеру, программируемое логическое устройство (PLD), программируемая пользователем вентильная матрица (FPGA) или встроенный контроллер могут использоваться в качестве модуля 108 антиспуфинга. PLD представляет собой электронный компонент, используемый для компоновки реконфигурируемых цифровых контуров, которые известны. В отличие от логического вентиля, который имеет фиксированную функцию, PLD имеет неопределенную функцию в момент изготовления. До того, как PLD может использоваться в контуре, оно должно быть запрограммировано с помощью требуемой логической схемы. Например, PLD может быть запрограммировано с возможностью имитации дискретных логических вентилей, которые описаны выше. FPGA содержат матрицу программируемых логических блоков и иерархию реконфигурируемых межсоединений, которые позволяют блокам «соединяться проводами вместе». Логические блоки могут быть выполнены с возможностью выполнения сложных комбинационных функций или всего лишь простых логических вентилей, подобных и исключающее ИЛИ. Встроенный контроллер представляет собой микроконтроллер в системе, который обрабатывает различные задачи системы, которые не обрабатывает операционная система.
[0019] В еще одном примере процессор в ЭБУ 102 может выполнять программирование для контроля адресов на шине 101. Если программа контроля обнаруживает, что входящее сообщение на шине 101 имеет такой же адрес, что и выходной адрес ЭБУ 102, и ЭБУ 102 не отправляло сообщение, программа контроля может в этом случае отправлять сообщение NACK шине 101 и заставлять другие модули на шине 101 игнорировать спуфинговое сообщение.
[0020] В некоторых примерах адрес ЭБУ 102 является динамическим и будет изменяться время от времени. В связи с этим преимущество использования встроенного контроллера или процессора ЭБУ 102 заключается в том, что он может быть запрограммирован с возможностью узнавания адресов ЭБУ 102 по мере их изменения. Например, процессор контроллера 104 может исполнять код для контроля выходных возникших сообщений ЭБУ 102 и хранения выходных адресов ЭБУ 102 в памяти и далее помещения выходных адресов ЭБУ 102 в модуль 108 антиспуфинга.
[0021] Признак ЭБУ 102, отправляющего сообщения NACK для уведомления устройств на шине 101 для игнорирования спуфинговых сообщений, заключается в том, что злоумышленник будет отключен от шины 101 повторяющимися NACK. Например, злоумышленник отправляет последовательность спуфинговых сообщений, ЭБУ 101 обнаруживает спуфинговые сообщения и реагирует с помощью NACK. После порогового числа NACK исходящий контроллер шины CAN спуфингового устройства будет входить в состояние отключения от шины, удаляя исходящее спуфинговое устройство из шины 101. В состоянии отключения от шины узлу не разрешено осуществлять связь по шине. Например, стандарт шины CAN ISO 11898-1:2003 разрешает счет ошибок передачи (NACK), равный 256, до приведения контроллера CAN спуфингового устройства в состояние отключения от шины.
[0022] Фигура 3 представляет собой блок-схему процесса, иллюстрирующую примерный процесс 200 для модуля 108 антиспуфинга, который может быть выполнен в аппаратном обеспечении или программном обеспечении.
[0023] Процесс 200 начинается на этапе 210, в котором адрес ЭБУ 102 загружают в модуль антиспуфинга. Например, ЭБУ 102 может иметь шестнадцатеричный адрес 1A0h, который далее загружают в модуль 108 антиспуфинга. Далее на этапе 220 трафик по шине 101 контролируют на предмет любых принятых спуфинговых сообщений, например, принятое сообщение имеет исходящий адрес 1A0h, такой же, как ЭБУ 102. Далее на этапе 230 выполняют определение, было ли принято одно такое сообщение. Если спуфинговое сообщение не принято на этапе 230, модуль антиспуфинга будет возвращаться к этапу 220. Если спуфинговое сообщение было принято, далее на этапе 240 отправляют сообщение NACK по шине 101, указывающее на возникновение ошибки. Далее на этапе 250 модули на шине 101 будут игнорировать это спуфинговое сообщение. После этапа 250 процесс 200 заканчивается. Альтернативно или дополнительно, процесс 200 может возвращаться к этапу 200 для продолжения контроля трафика шины 200.
[0024] Как используется в материалах настоящей заявки, наречие «по существу», уточняющее прилагательное, означает, что форма, конструкция, измерение, значение, вычисление, отсчет времени и т.д. могут отклоняться от точно описанной геометрии, расстояния, измерения, значения, вычисления, отсчета времени и т.д. из-за несовершенств материалов, механической обработки, изготовления, измерений датчиков, вычислений, времени обработки, времени связи и т.д.
[0025] В общем каждое из вычислительных устройств, таких как вычислительные устройства, рассмотренные в материалах настоящей заявки, включает в себя инструкции, исполняемые одним или более вычислительными устройствами, такие как инструкции, идентифицированные выше, и для выполнения блоков или этапов процессов, описанных выше. Исполняемые компьютером инструкции могут компилироваться или интерпретироваться на основе компьютерных программ, создаваемых с использованием множества языков и/или технологий программирования, включающих в себя, без ограничения, и либо по отдельности, либо в совокупности, Java™, C, C++, C#, Visual Basic, Java Script, Perl, HTML, PHP и т.д. В общем процессор (например, микропроцессор) принимает инструкции, например, из памяти, считываемого компьютером носителя и т.д., и исполняет эти инструкции, тем самым выполняя один или более процессов, включающих в себя один или более из процессов, описанных в материалах настоящей заявки. Такие инструкции и другие данные могут храниться и передаваться с использованием множества считываемых компьютером сред. Файл в вычислительном устройстве в общем представляет собой совокупность данных, хранящихся в считываемом компьютером носителе, таком как носитель данных, память с произвольным доступом и т.д.
[0026] Считываемый компьютером носитель включает в себя любой носитель, который участвует в обеспечении данных (например, инструкций), который может считываться компьютером. Такой носительможет принимать многие формы, включающие в себя, но не ограниченные ими, энергонезависимые носители, энергозависимые носители и т.д. Энергонезависимые носители включают в себя, например, оптические или магнитные диски и другую постоянную память. Энергозависимые носители включают в себя динамическую память с произвольным доступом (DRAM), которая обычно образует основную память. Общие формы считываемых компьютером носителей включают в себя, например, флоппи-диск, гибкий диск, жесткий диск, магнитную ленту, любую другую магнитную среду, CD-ROM, DVD, любую другую оптическую среду, перфокарты, бумажную ленту, любую другую физическую среду со схемами отверстий, RAM, PROM, EPROM, FLASH-EEPROM, любую другую микросхему или картридж памяти или любой другой носитель, с которого компьютер может считывать.
[0027] В отношении носителей, процессов, систем, способов и т.д., описанных в материалах настоящей заявки, следует понимать, что, несмотря на то, что этапы таких процессов и т.д. были описаны как происходящие согласно определенной упорядоченной последовательности, такие процессы могут быть осуществлены на практике с описанными этапами, выполняемыми в порядке, отличном от порядка, описанного в материалах настоящей заявки. Дополнительно следует понимать, что определенные этапы могут выполняться одновременно, что могут быть добавлены другие этапы, или что определенные этапы, описанные в материалах настоящей заявки, могут быть исключены. Другими словами, описания систем и/или процессов в материалах настоящей заявки обеспечены с целью иллюстрации определенных вариантов выполнения, и никоим образом не должны истолковываться так, чтобы ограничивать изложенный объект изобретения.
[0028] Соответственно, следует понимать, что вышеуказанное описание предназначено быть иллюстративным, а не ограничительным. Многие варианты выполнения и применения, отличные от обеспеченных примеров, будут ясны специалисту в данной области техники при прочтении вышеуказанного описания. Объем охраны изобретения следует определять не со ссылкой на вышеуказанное описание, но вместо этого следует определять со ссылкой на формулу изобретения, прилагаемую к настоящему документу и/или включенную в обычную заявку на патент, основанную на этом документе, вместе с полным объемом эквивалентов, на которые такая формула изобретения имеет право. Предполагается и подразумевается, что последующие разработки будут возникать в уровнях техники, рассмотренных в материалах настоящей заявки, и что раскрытые системы и способы будут включены в такие последующие варианты выполнения. В общем следует понимать, что раскрытый объект изобретения способен к преобразованию и изменению.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система и способ блокирования компьютерной атаки на транспортное средство | 2018 |
|
RU2706887C2 |
| Система и способ создания правил | 2018 |
|
RU2725033C2 |
| Система и способ контроля доступа к кибер-физической системе | 2019 |
|
RU2726884C1 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ГРУППОЙ САМОУПРАВЛЯЕМЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2022 |
|
RU2782004C1 |
| БОРТОВАЯ ИНФОРМАЦИОННАЯ СИСТЕМА | 2009 |
|
RU2402439C1 |
| СПОСОБ И ОБОРУДОВАНИЕ ДЛЯ УСТОЙЧИВОГО К СБОЯМ ПРИЕМА ПЕРЕДАЧИ СООБЩЕНИЙ ПО ПРЯМОЙ ТРАНЗИТНОЙ СЕТИ | 2022 |
|
RU2840329C2 |
| АВТОМОБИЛЬНОЕ ПРОТИВОУГОННОЕ УСТРОЙСТВО | 2010 |
|
RU2440256C2 |
| ДИАГНОСТИКА СИГНАЛОВ СВЯЗИ ТРАНСПОРТНОГО СРЕДСТВА С ИСПОЛЬЗОВАНИЕМ РАДИОПРИЕМНИКА | 2017 |
|
RU2684341C2 |
| ШЛЮЗ ДЛЯ АВТОМАТИЧЕСКОЙ МАРШРУТИЗАЦИИ СООБЩЕНИЙ МЕЖДУ ШИНАМИ | 2007 |
|
RU2415511C2 |
| Способ защиты систем управления транспортных средств от вторжений | 2019 |
|
RU2737229C1 |
Изобретение относится к защите электронных систем авто. В способе предотвращения спуфинга в автомобильной сети хранят адрес первого электронного блока управления транспортного средства и обнаруживают сообщение от множества вторых электронных блоков управления по шине связи. Исходящий адрес сообщения соответствует адресу электронного блока управления. Определяют, что упомянутое сообщение передавали с помощью источника, отличного от электронного блока управления и что этот источник является исходящим спуфинговым устройством. Генерируют и передают сообщение отрицательного квитирования (NACK) модулю по шине связи, передающее команду множеству вторых электронных блоков управления не предпринимать никаких действий по упомянутому сообщению. Приводят исходящее спуфинговое устройство в состояние отключения от шины после приема предварительно определенного числа NACK. Состояние отключения от шины представляет собой удаление исходящего спуфингового устройства из шины связи. Повышается защита от несанкционированного доступа. 3 н. и 15 з.п. ф-лы, 3 ил.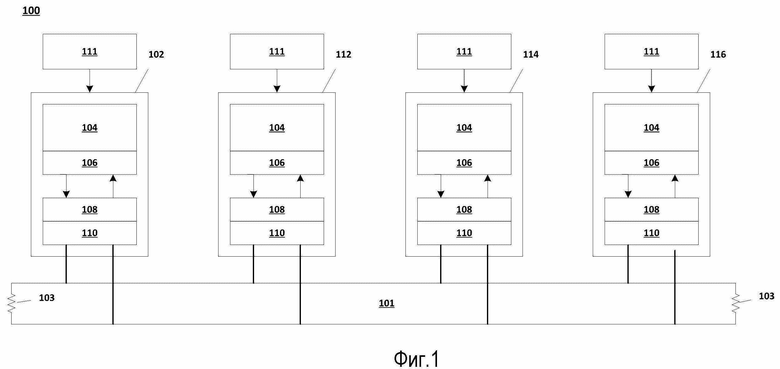
1. Способ предотвращения спуфинга в автомобильной сети, причем способ содержит этапы, на которых:
хранят по меньшей мере один адрес первого электронного блока управления транспортного средства;
обнаруживают по меньшей мере одно сообщение от множества вторых электронных блоков управления по шине связи транспортного средства, причем по меньшей мере одно сообщение имеет исходящий адрес, который соответствует по меньшей мере одному адресу электронного блока управления;
определяют, что упомянутое по меньшей мере одно сообщение передавали с помощью источника, отличного от электронного блока управления;
определяют, что упомянутый источник, отличный от электронного блока управления, является исходящим спуфинговым устройством;
генерируют и передают сообщение отрицательного квитирования (NACK) по меньшей мере одному модулю по шине связи транспортного средства в автомобильной сети, передающее команду множеству вторых электронных блоков управления не предпринимать никаких действий по упомянутому по меньшей мере одному сообщению; и
приводят исходящее спуфинговое устройство в состояние отключения от шины после приема предварительно определенного числа NACK, причем состояние отключения от шины представляет собой удаление исходящего спуфингового устройства из шины связи транспортного средства.
2. Способ по п.1, в котором обнаружение выполняют с помощью программы контроля, исполняемой процессором электронного блока управления.
3. Способ по п.1, в котором обнаружение выполняют с помощью матрицы дискретных логических вентилей.
4. Способ по п.1, причем шина связи транспортного средства является частью сети транспортного средства, которая включает в себя беспроводную сеть.
5. Способ по п.1, в котором по меньшей мере одно сообщение включает в себя данные датчика.
6. Способ по п.1, в котором электронный блок управления определяет, что по меньшей мере одно сообщение передавали с помощью источника, отличного от электронного блока управления, с помощью контроля по меньшей мере одного передаваемого сообщения электронного блока управления.
7. Способ по п.1, в котором по меньшей мере один адрес электронного блока управления является динамическим.
8. Система для предотвращения спуфинга в автомобильной сети, содержащая:
электронный блок управления, включающий в себя аппаратный процессор;
приложение, исполняемое процессором, причем приложение выполнено с возможностью осуществления:
обнаружения по меньшей мере одного сообщения от множества электронных блоков управления по шине в автомобильной сети, и причем по меньшей мере одно сообщение имеет исходящий адрес, который соответствует по меньшей мере одному адресу электронного блока управления;
определения, что упомянутое по меньшей мере одно сообщение было передано с помощью источника, отличного от электронного блока управления;
определения, что упомянутый источник, отличный от электронного блока управления, является исходящим спуфинговым устройством;
генерации и передачи сообщения отрицательного квитирования (NACK) по меньшей мере одному модулю по шине связи транспортного средства в автомобильной сети, передающего команду множеству электронных блоков управления не предпринимать никаких действий по упомянутому по меньшей мере одному сообщению; и
приведения исходящего спуфингового устройства в состояние отключения от шины после приема предварительно определенного числа NACK, причем состояние отключения от шины представляет собой удаление исходящего спуфингового устройства из шины связи транспортного средства.
9. Система по п.8, причем автомобильная сеть представляет собой беспроводную сеть.
10. Система по п.8, причем сообщения передаются в ответ на датчик.
11. Система по п.8, в которой приложение определяет по меньшей мере один адрес электронного блока управления с помощью контроля по меньшей мере одного передаваемого сообщения электронного блока управления.
12. Система по п.8, в которой по меньшей мере один адрес электронного блока управления является динамическим.
13. Электронный блок управления для предотвращения спуфинга в автомобильной сети, имеющий инструкции, реализованные в нем, которые при исполнении процессором электронного блока управления предписывают электронному блоку управления осуществлять:
обнаружение по меньшей мере одного сообщения от множества электронных блоков управления по шине в автомобильной сети, и причем по меньшей мере одно сообщение имеет исходящий адрес, который соответствует по меньшей мере одному адресу электронного блока управления;
определение, что упомянутое по меньшей мере одно сообщение было передано источником, отличным от электронного блока управления;
определение, что упомянутый источник, отличный от электронного блока управления, является исходящим спуфинговым устройством; и
генерацию и передачу сообщения отрицательного квитирования (NACK) по меньшей мере одному модулю по шине связи транспортного средства в автомобильной сети, передающего команду множеству электронных блоков управления не предпринимать никаких действий по упомянутому по меньшей мере одному сообщению; и
приведение исходящего спуфингового устройства в состояние отключения от шины после приема предварительно определенного числа NACK, причем состояние отключения от шины представляет собой удаление исходящего спуфингового устройства из шины связи транспортного средства.
14. Электронный блок управления по п.13, причем автомобильная сеть представляет собой беспроводную сеть.
15. Электронный блок управления по п.13, причем автомобильная сеть соединена с телематическим блоком.
16. Электронный блок управления по п.13, причем сообщения передаются в ответ на датчик.
17. Электронный блок управления по п.13, причем по меньшей мере один адрес электронного блока управления определяется с помощью контроля по меньшей мере одного передаваемого сообщения электронного блока управления.
18. Электронный блок управления по п.13, причем по меньшей мере один адрес электронного блока управления является динамическим.
| US 7707638 B2, 27.04.2010 | |||
| US 8121624 B2, 21.02.2012 | |||
| US 8874926 B1, 28.10.2014 | |||
| KR 101434155 B1, 27.08.2014 | |||
| WO 2015012934 A2, 29.01.2015. |

