Изобретение относится к тяге (системы) управления для изменения шага лопасти несущего винта вертолета, причем тяга управления выполнена с возможностью регулировки в продольном направлении, включающей в себя по меньшей мере один элемент области прилегания, по меньшей мере один упорный элемент, который выполнен для того, чтобы во взаимодействии по меньшей мере с одним элементом области прилегания ограничивать возможность регулировки тяги управления в продольном направлении задаваемым диапазоном регулирования.
Из DE 102009001393A1 известно устройство тяги управления для изменения шага лопастей несущего винта. В описанном там устройстве тяги управления для изменения шага лопастей несущего винта вертолета имеется тяга управления с двумя предусмотренными с концевых сторон гнездами подшипника и с расположенной между гнездами подшипника, регулируемой по длине областью регулирования, причем область регулирования известна также как ход или диапазон хода. Тяга управления на своем одном, находящемся со стороны лопасти несущего винта конце через одно гнездо подшипника соединена с лопастью несущего винта, а на своем другом, находящемся со стороны качающейся шайбы конце через другое гнездо подшипника соединена с качающейся шайбой. Расстояние между обоими гнездами подшипника является регулируемым во время полета посредством регулируемой по длине области регулирования с помощью расположенного в области регулирования привода. Для регулировки тяги управления в известном ранее устройстве тяги управления в качестве привода в области регулирования предусмотрены электродвигатель и передаточный механизм. В дополнение к этому отдельные тяги управления могут быть отрегулированы по длине в их продольном направлении для основной/предварительной настройки. Основная/предварительная настройка осуществляется через регулярные интервалы и только на земле при неподвижном роторе. Для механической основной/предварительной настройки тяги управления отвинчивается стопорная гайка и приподнимается находящееся под ней стопорное кольцо. Доступный после этого зубчатый венец может быть повернут с помощью зубчатого ключа с шагом зубчатого венца.
Описанная там тяга управления дает возможность индивидуально юстировать лопасть несущего винта вертолета в полете. С помощью этого, называемого регулировкой в полете (inflight-tuning) способа можно непрерывно в зависимости от состояния полета снижать вибрации, которые возникают вследствие неодинаковости лопастей. Недостатком в этом устройстве является то, что описанные там упоры для ограничения хода или для установления диапазона регулирования, когда ходовая гайка прилегает к соответствующему упору или перемещается к нему, могут быть сильно нагружены внешними силами или силами, исходящими от привода с ходовым винтом. Другой недостаток состоит в том, что механика для основной/предварительной настройки тяги управления крайне сложна, настройка осуществляется вручную и подвержена погрешностям.
В основе изобретения лежит задача, состоящая в том, чтобы устранить недостатки уровня техники и, прежде всего, предложить тягу управления описанного в начале вида, в которой основная/предварительная настройка тяги управления становится выполняемой проще и быстрее. В дополнение к этому должно быть уменьшено многообразие деталей, что делает тягу управления легче и экономичнее. Другой аспект изобретения состоит в том, чтобы предоставить способ основной/предварительной настройки.
Согласно изобретению это решается в тяге управления для изменения шага лопасти несущего винта вертолета, регулируемой в продольном направлении (по длине) и включающей в себя по меньшей мере один элемент области прилегания, расположенный с возможностью вращения вокруг продольной оси тяги управления, и по меньшей мере один упорный элемент, выполненный для того, чтобы во взаимодействии по меньшей мере с одним элементом области прилегания ограничивать возможность регулировки тяги управления в продольном направлении задаваемым диапазоном регулирования, причем по меньшей мере один упорный элемент выполнен с возможностью перевода из первого состояния, в котором он ограничивает возможность регулировки тяги управления, во второе состояние, в котором он допускает возможность регулировки тяги управления за пределы задаваемого диапазона регулирования, и наоборот. В соответствии с изобретением в первом состоянии упорный элемент допускает поворот элемента области прилегания в пределах диапазона вращения.
В смысле данного изобретения под упорным элементом следует понимать физический элемент, который установлен для того, чтобы ограничивать поворот другого физического элемента, прежде всего элемента области прилегания, вокруг продольной оси тяги управления. Для этого упорный элемент может быть располагаем, прежде всего, без возможности вращения относительно поворачиваемого элемента области прилегания и выполнен для того, чтобы воспринимать усилия и/или моменты вращения поворачивающегося или вращающегося элемента области прилегания и, например, отводить или переводить на соседние конструктивные элементы.
В смысле данного изобретения под элементом области прилегания следует понимать физический элемент, который установлен для того, чтобы приходить в прилегание по меньшей мере к одному упорному элементу. Для этого он имеет, прежде всего, область, которая, по меньшей мере, частично перекрывается радиально в окружном направлении упорным элементом и выполнена для того, чтобы вводить вызванные поворотом усилия и/или моменты вращения в окружном направлении в упорный элемент.
В смысле данного изобретения понятие "взаимодействие" означает, прежде всего, то, что элемент области прилегания выполнен с возможностью ввода в контакт по меньшей мере с одним упорным элементом для ограничения регулировки тяги управления.
Тяга управления может иметь расположенный соосно с ней и с возможностью вращения вокруг ее продольной оси первый несущий элемент по меньшей мере с одним простирающимся в продольном направлении тяги управления и прерывающимся в окружном направлении первым выступом, причем этот первый выступ образует элемент области прилегания, причем первая область прилегания может быть расположена на первом конце, а вторая 30 область прилегания – на находящемся по существу напротив первого конца втором конце первого выступа. Выполненный в виде выступа, который известен также как кулачок или уступ, элемент области прилегания может быть изготовлен конструктивно просто и устроен особо компактно.
Например, выполненный в виде резьбового болта или винтового упора упорный элемент можно переводить из первого положения во второе и наоборот. В первом положении резьбовой болт может быть введенным. Во втором положении, в который резьбовой болт может быть переведен посредством выведения, резьбовой болт может деблокировать поворачивание за пределы диапазона хода, потому что тогда во втором положении он больше не может взаимодействовать с элементом области прилегания для ограничения диапазона хода, то есть не может ограничивать регулировку тяги управления. Так может быть выполнена основная/предварительная настройка тяги управления, которая может быть выполнена на земле при неподвижном роторе. Основная/предварительная настройка может быть осуществлена, например, с помощью электродвигателя, так что выгодным образом можно отказаться от ручного обслуживания. При основной/предварительной настройке тяга управления изменяется в продольном направлении на величины порядка до 40 миллиметров (мм). Осуществляется, так сказать, грубая настройка тяги управления.
Возможность регулировки тяги управления в продольном направлении для снижения вибраций во время полета, называемая также регулировкой в полете (inflight-tuning), может быть ограничена за счет того, что по меньшей мере один элемент области прилегания входит в прилегание в окружном направлении тяги управления по меньшей мере с одним упорным элементом. Под этим понимается, что элемент области прилегания, отстоящий радиально от продольной оси, может вращаться вокруг продольной оси в одном из двух направлений вращения, а именно до тех пор, пока элемент области прилегания не будет повернут до упорного элемента, то есть он будет прилегать к упорному элементу и упорный элемент будет препятствовать дальнейшему повороту. Элемент области прилегания может быть, например, соединен с приводным элементом или выполнен неотъемлемо с ним, что выполнено для того, чтобы перемещать тягу управления в продольном направлении. Благодаря этому тяга управления сделана особо компактной, легкой и экономичной, потому что уже имеющийся приводной элемент может быть использован для выполнения другой функции. Для изменения задаваемого диапазона регулирования или диапазона хода по меньшей мере один упорный элемент может быть перемещен в окружном направлении тяги управления. В отличие от грубой настройки возможность регулировки во время полета служит, так сказать, для точной настройки и изменяется на величины порядка до 1,5 мм. Оказалось, что эффективная связь в окружном направлении между элементом области прилегания и упорным элементом вызывает существенно меньшие, действующие на упор силы, чем, например, действующая в продольном направлении тяги управления эффективная связь между элементом области прилегания и упорным элементом. К тому же оказалось, что с помощью единственного упорного элемента является ограничиваемым как удлинение, так и укорачивание тяги управления в продольном направлении для регулировки в полете.
Помимо этого, выявилось, что с помощью передвигаемого между двумя положениями упорного элемента можно как ограничивать диапазон регулирования, так и изменять основную/дополнительную настройку.
В предпочтительной форме осуществления может быть предусмотрено, что по меньшей мере один упорный элемент является резьбовым болтом или винтовым упором, причем он расположен таким образом, что его продольная ось ориентирована по существу перпендикулярно продольной оси тяги управления, причем по меньшей мере один резьбовой болт выполнен с возможностью перевода в радиальном направлении, прежде всего изнутри радиально наружу, из первого положения во второе положение для его перевода из первого состояния во второе состояние. Помимо этого, является предпочтительным, если по меньшей мере один упорный элемент является резьбовым болтом, который выполнен с возможностью ввода в соответствующую выемку, прежде всего в отверстие кожуха тяги управления. Помимо этого, является предпочтительным, если упорный элемент выполнен с возможностью перевода из первого состояния во второе состояние, причем в первом состоянии упорным элементом ограничивается возможность регулировки тяги управления, а во втором состоянии упорным элементом допускается возможность регулировки тяги управления за пределы задаваемого диапазона регулирования.
Резьбовой болт или винтовой упор может быть завинчен, например, в выемку, прежде всего в отверстие кожуха тяги управления. Если резьбовой болт завинчен, то он находится в первом положении, в котором возможность регулировки ограничивается. Если резьбовой болт вывинчен из отверстия, то он находится во втором положении, в котором допускается возможность регулировки за пределы диапазона регулирования. Мыслимы также другие и углы между осями. Выполненный в виде резьбового болта или винтового упора упорный элемент может быть изготовлен конструктивно крайне просто и недорого.
Если по условиям монтажного пространства невозможно смещать по меньшей мере один упор по окружности тяги управления, потому что, например, расположены периферийные устройства, то изменение диапазона регулирования выгодным образом может быть осуществлено с помощью второго несущего элемента, который называется также упорным кольцом. При этом функцию упорного элемента берет на себя второй выступ, известный также как кулачок, или уступ, или тому подобное. Упорное кольцо установлено, преимущественным образом, с возможностью вращения вокруг продольной оси и может иметь несколько выемок с распределением по периметру. Для фиксации или стопорения упорного кольца фиксирующее средство, например стопорный болт, вводится через выемку кожуха тяги управления в одну из выемок упорного кольца, так что упорное кольцо с помощью стопорного болта связано с кожухом тяги управления без возможности вращения.
Отсюда можно предвидеть другой аспект данного изобретения, тягу управления для изменения шага лопасти несущего винта вертолета, причем тяга управления выполнена с возможностью регулировки в продольном направлении, включающую в себя: по меньшей мере один элемент области прилегания, по меньшей мере один упорный элемент, который выполнен для того, чтобы во 25 взаимодействии по меньшей мере с одним элементом области прилегания ограничивать возможность регулировки тяги управления в продольном направлении задаваемым диапазоном регулирования, причем упорный элемент выполнен с возможностью перевода из первого состояния во второе состояние, причем в первом состоянии по меньшей мере одним упорным элементом ограничивается возможность регулировки тяги управления, а во втором состоянии – допускается возможность регулировки тяги управления за пределы задаваемого диапазона регулирования.
Является особо предпочтительным, если тяга управления имеет расположенный соосно с ней и с возможностью вращения вокруг ее продольной оси первый несущий элемент по меньшей мере с одним простирающимся в продольном направлении тяги управления и прерванным в окружном направлении первым выступом, причем этот выступ образует элемент области прилегания, и если по меньшей мере один упорный элемент расположен по меньшей мере на одном расположенном соосно с тягой управления втором несущем элементе, причем упорный элемент образуется посредством простирающегося в продольном направлении тяги управления второго выступа, причем в первом состоянии упорный элемент соединен с кожухом тяги управления, вследствие чего в первом состоянии возможность регулировки тяги управления ограничивается, а во втором состоянии это соединение разорвано, вследствие чего допускается возможность регулировки за пределы задаваемого диапазона регулирования.
Например, выполненные в виде упорных колец упорные элементы могут быть переведены из первого состояния во второе и наоборот. В первом состоянии упорное кольцо предохранено, например, от поворачивания, например, с помощью стопорного болта, то есть зафиксировано. Вместе с тем стопорное кольцо также соединено с кожухом тяги управления. Во втором состоянии стопорный болт высвобожден или удален, то есть соединение разорвано, вследствие чего стопорное кольцо становится, например, вращаемым. Таким образом, например при основной/предварительной настройке, выполненный в виде уступа элемент области прилегания, выполненный в виде уступа упорный элемент и вместе с тем также упорное кольцо могут быть повернуты, или, выражаясь иначе, проведены, за пределы задаваемого диапазона регулирования.
Помимо этого, является предпочтительным, если тяга управления выполнена с возможностью электрической регулировки в продольном направлении посредством исполнительного элемента.
Является особо предпочтительным, если для регулировки тяги управления исполнительный элемент имеет привод с ходовым винтом или подобное, причем ходовой винт привода с ходовым винтом выполнен с возможностью приведения в движение через шестеренчатую ступень от приводимой в движение с помощью электродвигателя планетарной передачи, и причем для регулировки тяги управления ходовой винт аксиально движет ходовую гайку, и причем ходовой винт является приводным элементом.
Привод с ходовым винтом рассчитан, преимущественным образом, так, что им покрывается весь необходимый диапазон регулировки тяги управления. Тем не менее, применимы также другие приводы.
Помимо этого, является предпочтительным, если по меньшей мере один элемент области прилегания соединен без возможности вращения с шестерней шестеренчатой ступени, причем эта шестерня соединена с ходовым винтом привода с ходовым винтом. Однако является также мыслимым, что шестерня и ходовой винт выполнены неотъемлемо. Вследствие того, что элемент области прилегания соединен без возможности вращения с шестеренчатой ступенью, возможна непосредственная передача силы и/или момента вращения по меньшей мере на один упорный элемент.
Является особо предпочтительным, если по меньшей мере один элемент области прилегания выполнен неотъемлемо, то есть монолитно, с шестерной шестеренчатой ступени, причем эта шестерня соединена с ходовым винтом привода с ходовым винтом. Неотъемлемо могут быть выполнены также все три компонента. Является также предпочтительным, если исполнительный элемент выполнен с возможностью управления в зависимости от заданных значений и действительных положений, а также от сигналов датчиков, то есть может регулироваться и/или управляться. Управляющее и/или регулирующее воздействие может быть определено с помощью действительного положения и датчиков заданных значений. Рабочее состояние установки может быть отображено посредством индикации.
В рамках другого предпочтительного осуществления изобретения может быть предусмотрено, что для изменения диапазона регулирования по меньшей мере один упорный элемент выполнен с возможностью регулировки в окружном направлении тяги управления. За счет этого можно в зависимости от требования уменьшать или увеличивать диапазон регулирования. Так, является мыслимым, что один, например, из двух упорных элементов, которые предоставляют диапазон поворота, составляющий, например, 210°, смещается в окружном направлении таким образом, что может быть реализован больший диапазон поворота, например 300°, или меньший диапазон поворота, например 180°. Таким образом, с помощью лишь одного конструктивного элемента, прежде всего упорного элемента, можно осуществлять как ограничение диапазона регулирования, так и основную/предварительную настройку, что приводит к существенному снижению количества деталей, к механической простоте и снижению затрат.
Другим аспектом изобретения является обеспечение способа, а именно способа регулировки тяги управления в продольном направлении, причем тяга управления включает в себя по меньшей мере один элемент области прилегания, расположенный с возможностью вращения вокруг продольной оси тяги управления, по меньшей мере один упорный элемент, который выполнен для того, чтобы во взаимодействии по меньшей мере с одним элементом области прилегания ограничивать возможность регулировки тяги управления в продольном направлении задаваемым диапазоном регулирования, включающий в себя следующие шаги:
- на первом шаге в момент времени t1 по меньшей мере один упорный элемент переводят из первого состояния во второе состояние, снимая ограничение диапазона регулирования,
- на втором шаге в момент времени t2 тягу управления переводят с первой длины на вторую длину,
- на третьем шаге в момент времени t3, причем t1 < t2 < t3, по меньшей мере один упорный элемент переводят из второго состояния в первое состояние, ограничивая диапазон регулирования.
Помимо этого, предпочтительным является способ, при котором перевод на втором шаге осуществляют с помощью электродвигателя, а перевод на первом шаге и третьем шаге– вручную.
Этот способ дает возможность более быстрой и более безошибочной регулировки, чем известный из уровня техники способ, при котором регулировку осуществляли вручную
В последующем настоящее изобретение разъясняется далее с помощью чертежей.
Показано на:
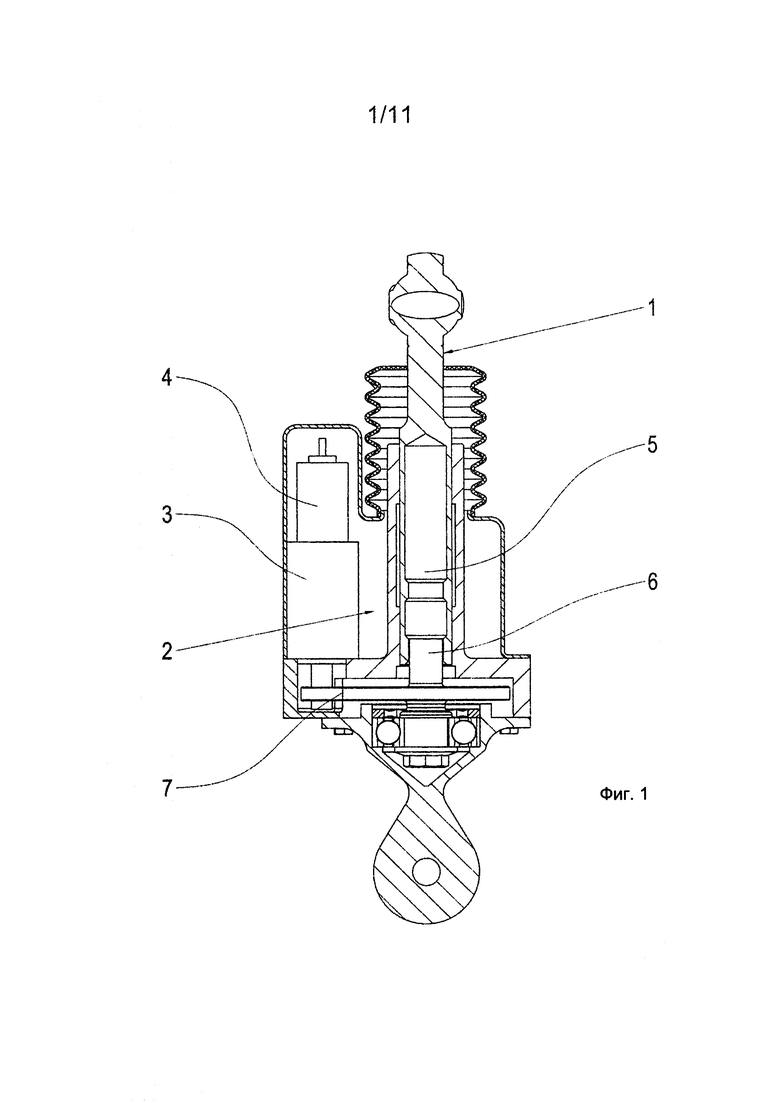
Фиг. 1 трехмерный вид на тягу управления согласно изобретению в разрезе,
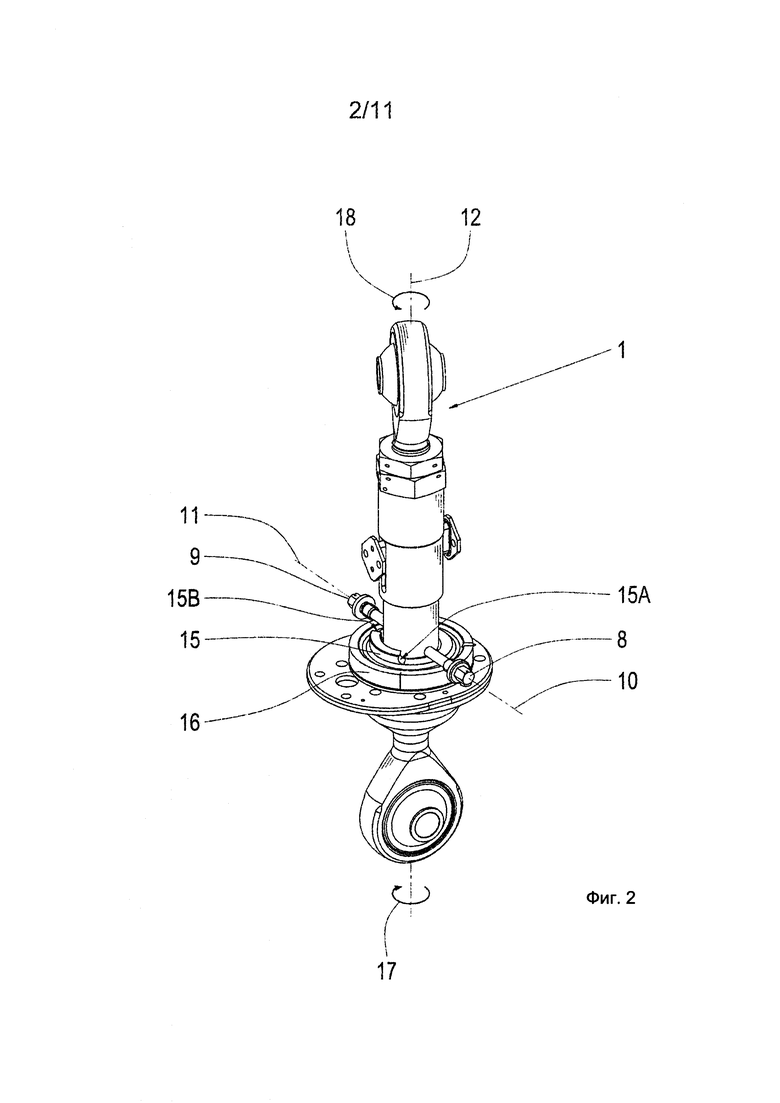
Фиг. 2 трехмерный вид на первую предпочтительную форму осуществления,
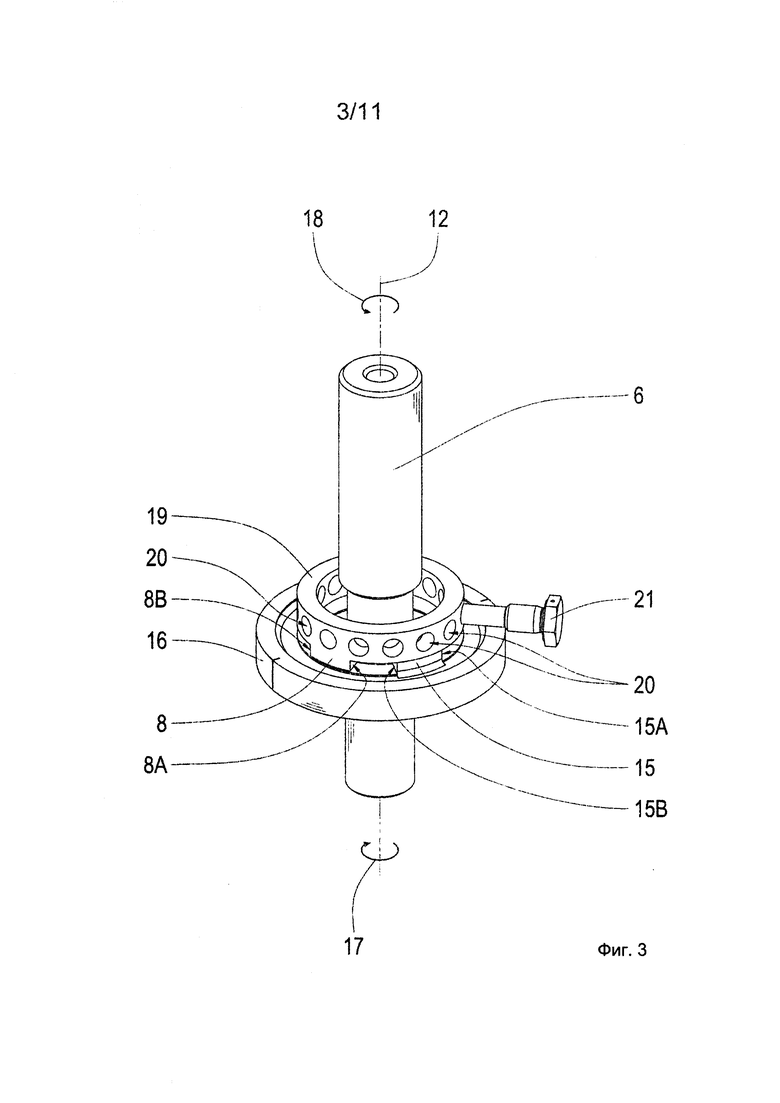
Фиг. 3 трехмерный вид на вторую предпочтительную форму осуществления,
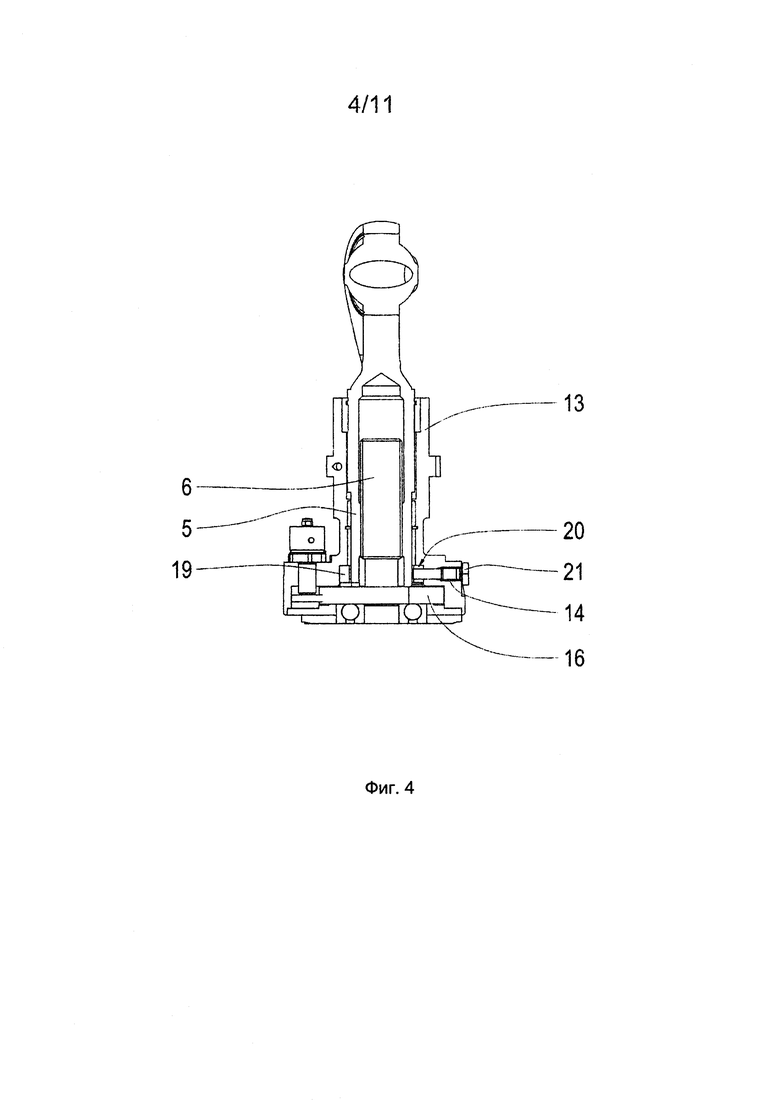
Фиг. 4 предпочтительная форма осуществления согласно фиг. 3 в продольном разрезе,
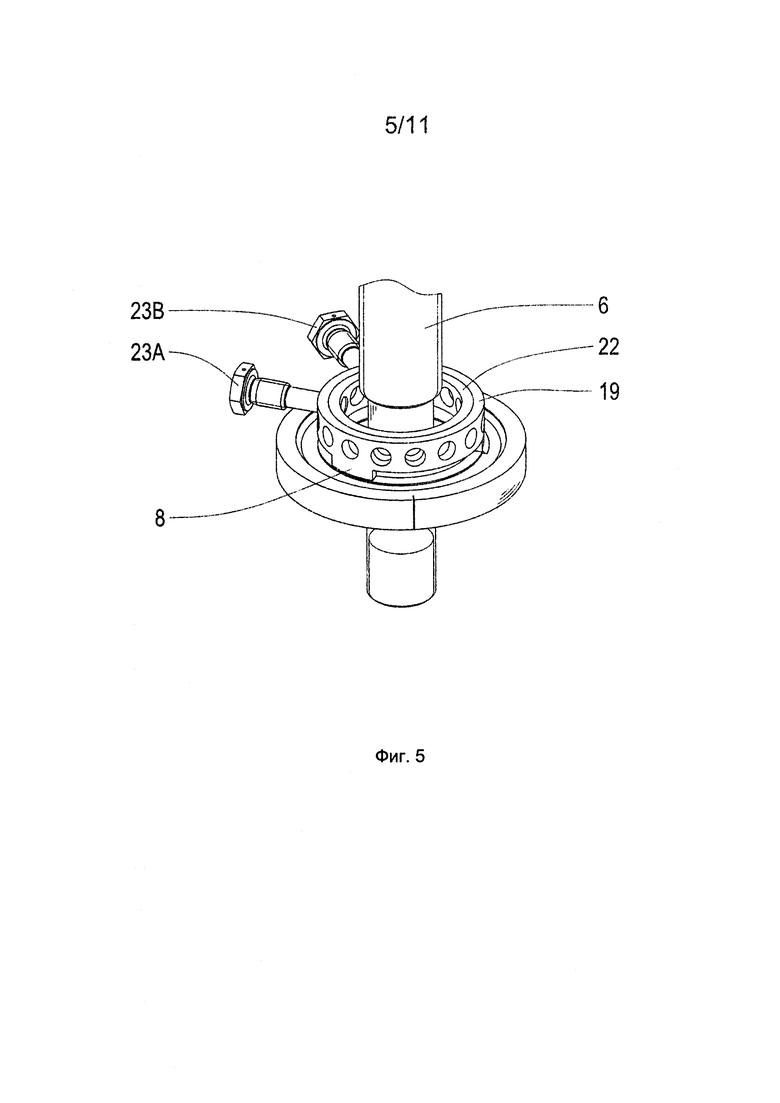
Фиг. 5 трехмерный вид на третью предпочтительную форму осуществления,
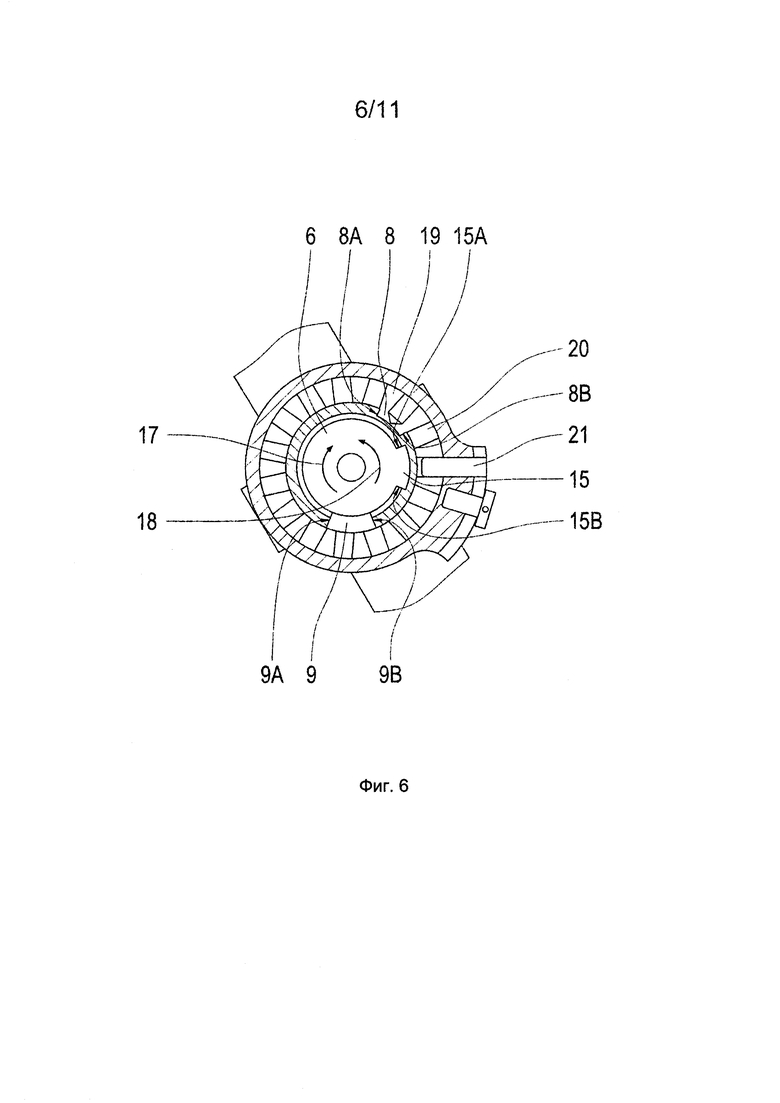
Фиг. 6 четвертая предпочтительная форма осуществления в поперечном разрезе, и
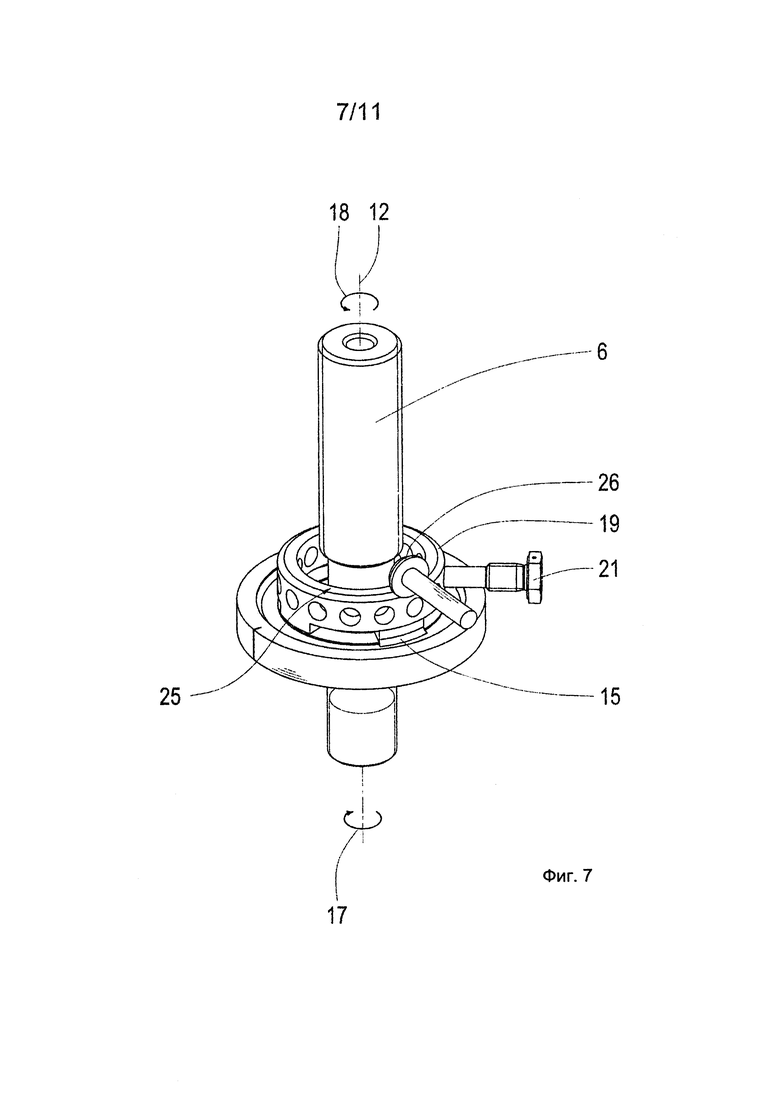
Фиг. 7 пример приспособления для перемещения упорного элемента.
Предлагаемая тяга управления для изменения шага лопасти несущего винта вертолета известным самим по себе образом имеет на одном своем конце гнездо подшипника со стороны лопасти несущего винта и на другом своем конце – гнездо подшипника со стороны двигателя. Тяга 1 управления выполнена с возможностью регулировки в продольном направлении в пределах заданного диапазона регулирования. Для регулировки тяги управления тяга 1 управления имеет по меньшей мере один исполнительный элемент 2, который содержит привод с ходовым винтом, который через планетарную передачу 3 приводится в движение от электродвигателя 4. В приводе с ходовым винтом содержится соединенная с тягой 1 управления ходовая гайка 5, которая аксиально перемещается по ходовому винту 6. Приведение в движение ходового винта 6 осуществляется через шестереночную ступень или же ступень 7 с цилиндрическими зубчатыми колесами, которая приводится в движение от электродвигателя 4 через планетарную передачу 3. Детальное ознакомление с регулированием длины тяги управления дано, прежде всего, на фиг. 1.
Согласно изобретению предусмотрено, что заданный по меньшей одним упорным элементом диапазон регулирования является изменяемым, имеется эффективная связь в окружном направлении между ограничивающим диапазон вращения, или поворота, ходового винта 6 упорным элементом и вращающимся ходовым винтом 6 и возможна быстрая и почти безошибочная основная/предварительная настройка тяги управления.
На фиг. 2-6 показано, как это достигается, причем на фиг. 2 показана предпочтительная форма осуществления с выполненным в виде резьбового болта упорным элементом 8, 9, а на фиг. 3-8 – другая предпочтительная форма осуществления с выполненным в виде уступа упорным элементом 8, 9. На фиг. 9-11 показан уровень техники.
На фиг. 2 изображена первая предпочтительная форма осуществления. Диапазон вращения, или поворота, не изображенного ходового винта 6 ограничивается двумя выполненными в виде резьбовых болтов упорными элементами 8, 9. Каждая из соответствующих продольных осей 10, 11 резьбовых болтов 8, 9 перпендикулярно пересекает продольную ось 12 тяги 1 управления. Два резьбовых болта 8, 9 расположены напротив друг друга относительно продольной оси 12 тяги 1 управления, так что две продольные оси 10, 11 образуют общую продольную ось. В не изображенном кожухе 13 тяги управления предусмотрено с распределением по окружности несколько отверстий 14 кожуха, в которых могут быть размещены резьбовые болты 8, 9. Во введенном состоянии резьбовые болты 8, 9 не вступают в контакт с ходовым винтом 6. Помимо этого, тяга 1 управления имеет выполненный в виде кулачка или уступа элемент 15 области прилегания, который соединен с выполненным в виде шестерни 16 шестеренчатой ступени 7 первым несущим элементом. Шестерня 16, в свою очередь, соединена с ходовым винтом 6 без возможности вращения. Однако она может быть выполнена также неотъемлемо с ходовым винтом 6. Если для регулировки ходовой винт 6 вращается в направлении 18 против часовой стрелки, то уступ 15 вступает в прилегание первой областью 15А прилегания с первым резьбовым болтом 8. При вращении в обратном направлении 17 уступ 15 вступает в прилегание второй областью 15В упора со вторым резьбовым болтом 9. Уступ 15 выполнен неотъемлемо, то есть монолитно, с шестерней 16 шестеренчатой ступени 7. Изображенный на фиг. 2 диапазон вращения ходового винта 6 с учетом протяженности уступа 15 и резьбовых болтов 8, 9 в окружном направлении составляет около 150°. Для изменения диапазона регулирования один из резьбовых болтов 8, 9 или оба резьбовых болта 8, 9 могут быть высвобождены из соответствующего отверстия 14 кожуха и введены в другое отверстие 14 кожуха. Таким образом, если бы был извлечен один из резьбовых болтов 8, 9, то диапазон регулирования стал бы изменяемым до диапазона вращения ходового винта 6 приблизительно от 15° приблизительно до 345°. При этом специалисту понятно, что регулировка осуществляется не бесступенчато, а, прежде всего, в зависимости от количества и в зависимости от диаметра отверстий 14 кожуха.
Резьбовые болты 8, 9 находятся в первом положении Р1. Если должна быть выполнена основная/предварительная настройка, то резьбовые болты 8, 9 посредством их вывинчивания переводятся из первого положения Р1 во второе положение Р2. Теперь уступ 15, приводимый в движение с помощью ходового винта 6, может быть повернут за пределы ранее заданного диапазона регулирования, чтобы вновь грубо настроить тягу управления в продольном направлении. Когда необходимая длина достигнута, резьбовые болты 8, 9 посредством их завинчивания в необходимое отверстие 14 кожуха переводятся из второго положения в первое положение.
На фиг. 3 показана другая предпочтительная форма осуществления. При этом предусмотрен выполненный в виде кулачка или уступа, простирающийся в продольном направлении первый упорный элемент 8, который неотъемлемо расположен на выполненном в виде упорного кольца втором несущем элементе 19 и имеет две области 8А, 8В упора. Упорное кольцо 19 расположено соосно с ходовым винтом 6 с возможностью вращения и направляется не изображенным направляющим элементом, который расположен внутри кожуха 13 тяги управления. Для фиксации упорного кольца 19 выполненное в виде стопорного болта фиксирующее средство 21 вводится в расположенное в не изображенном кожухе 13 отверстие 14 и в одно из нескольких распределенных по периметру упорного кольца 19 отверстий 20. Если ходовой винт 6 для регулировки вращается против направления 18 часовой стрелки, то уступ 15 своей областью 15А прилегания вступает в прилегание с кулачком 8. При обратном направлении 17 вращения уступ 15 вступает в прилегание с кулачком 8 своей областью 15В прилегания. Согласно фиг. 3 за вычетом соответствующей протяженности уступов 8, 15 в окружном направлении возможно вращение ходового винта 6 в направлении 18 против часовой стрелки приблизительно на 335°, а в направлении 17 по часовой стрелке – приблизительно на 5°. То есть угловой диапазон определяется протяженностью соответствующих уступов 8, 15 в окружном направлении. Для изменения диапазона регулирования стопорный болт 21 извлекается из отверстий 14 и 20. Теперь упорное кольцо 19 с уступом 8 можно повернуть вокруг оси 12 и настроить диапазон регулирования вновь. Для фиксации упорного кольца 19 необходимое отверстие 20 приводится в совмещение с отверстием 14 кожуха и вставляется стопорный болт 21.
Упорное кольцо 19 зафиксировано, так что уступ 8 находится в первом состоянии Z1. Если должна быть выполнена основная/предварительная настройка, то уступ 8 за счет извлечения стопорного болта 21 из соответствующих отверстий 14, 20 переводится из первого состояния Z1 во второе состояние Z2. Теперь уступ 15, приводимый в движение с помощью ходового винта 6, может быть повернут за пределы ранее заданного диапазона регулирования, чтобы вновь грубо настроить тягу управления в продольном направлении. При этом уступ ведет за собой в направлении 17, 18 вращения уступ 8. Когда необходимое положение достигнуто, стопорный болт 21 вводится в отверстие 14 и в соответствующее отверстие 20.
На фиг. 4 показана предпочтительная форма осуществления согласно фиг. 3 15 другом виде. Можно видеть, что стопорный болт 21 через отверстие 14 кожуха введен в отверстие 20. За счёт этого диапазон вращения, или поворота, ходового винта 6 ограничен до углового диапазона около 330°. Как можно видеть помимо этого, стопорный болт 21 не вступает в контакт ни с ходовой гайкой 5, ни с ходовым винтом 6.
На фиг. 5 показана другая предпочтительная форма осуществления. В отличие от фиг. 3 и фиг. 4 дополнительно к первому упорному элементу 8 предусмотрен не изображенный, простирающийся в продольном направлении второй упорный элемент 9, который неотъемлемо расположен на выполненном в виде упорного кольца третьем несущем элементе 22, причем упорное кольцо 22 расположено с возможностью вращения соосно с ходовым винтом 6 и радиально между ходовым винтом 6 и упорным кольцом 19. С помощью уступов 8 и 9 за счет того, что не изображенный уступ 15 может быть повернут для регулировки тяги управления 1, определяется настраиваемый угловой диапазон. С помощью второго упорного кольца 22 может быть настроен другой диапазон регулирования, или ход. По сравнению с фиг. 3 может быть настроен, прежде всего, меньший ход. Диапазон хода изображенной на фиг. 5 тяги 1 управления составляет около 200°. Каждое из упорных колец 19 и 22 предохранено от поворачивания с помощью стопорного болта 23А или же 23В. Однако является также мыслимым, что оба упорных кольца предохранены единственным стопорным болтом.
Упорные кольца 19, 22 зафиксированы, так что уступы 8, 9 находятся в первом состоянии Z1. Если должна быть выполнена основная/предварительная настройка, то уступы 8, 9 за счет извлечения стопорных болтов 23А, 23В из соответствующих текущих отверстий 14, 20 переводятся из первого состояния Z1 во второе состояние Z2. Теперь уступ 15, приводимый в движение с помощью ходового винта 6, может быть повернут за пределы ранее заданного диапазона регулирования, чтобы вновь грубо настроить тягу управления в продольном направлении. При этом уступ 15 ведет за собой в направлении 17, 18 вращения уступы 8, 9. Когда необходимая длина достигнута, стопорные болты 23А, 23В вводятся в текущее отверстие 14 и в соответствующее текущее отверстие 20.
На фиг. 6 показана другая предпочтительная форма осуществления. Упор 19 со своим уступом 8 предохранен от поворачивания с помощью стопорного болта 21. Напротив, упорное кольцо 22 со своим уступом 9 не предохранено от поворачивания. Уступ 15 ходового винта 6 и уступ 8 упорного кольца 19 не имеют общей области совмещения в радиальном направлении, то есть уступ 15 отдален в радиальном направлении от уступа 8, так что возможно увеличение диапазона регулирования, или хода, сверх одного оборота ходового винта. Если для регулировки тяги 1 управления уступ 15 поворачивается одном из обоих направлений 17, 18 вращения, то уступ 15 своей первой или второй областью 15А или же 15В прилегания ведет за собой в окружном направлении уступ 9 не изображенного и незафиксированного упорного кольца 22 до тех пор, пока не будет достигнута первая область 8А упора или вторая область 8В упора уступа 8 и уступ 9 будет прижат уступом 15 к зафиксированному уступу 8. Преимущество изображенной на фиг. 6 формы осуществления состоит, прежде всего, в том, что ходовой винт 6 для регулировки тяги управления в продольном направлении является вращаемым сверх одного оборота ходового винта. Диапазон хода изображенной на фиг. 6 тяги 1 управления составляет около 630°.
Если на фиг. 6 ходовой винт 6 с уступом 15 поворачивается, например, в направлении 17 по часовой стрелке, то уступ 15 поворачивается, пока он своей областью 15В прилегания не будет прилегать к области 9В упора уступа 9.
Уступом 15 захватывается в направлении вращения незафиксированный уступ 9, пока область 9А упора уступа 9 не упрется в область 8А упора зафиксированного уступа 8.
Если на фиг. 6 ходовой винт 6 с уступом 15 поворачивается, например, в направлении 18 против часовой стрелки, то уступ 15 сначала поворачивается без соприкосновения мимо уступа 8, пока уступ 15 своей областью 15А прилегания не будет прилегать к области 9А упора уступа 9. Уступом 15 захватывается в направлении вращения незафиксированный уступ 9, пока область 9В упора уступа 9 не упрется в область 8В упора зафиксированного уступа.
Основная/предварительная настройка тяги управления согласно фиг. 6 осуществляется исходя из смысла фиг. 4 и 5.
На фиг. 7 показан пример того, как упорное кольцо 19 может быть перемещено с помощью конической зубчатой передачи. Для этого на упорном кольце 19, на верхней стороне, имеется зубчатый венец 25, и оно действует, так сказать, как плоское коническое колесо. Для настройки диапазона регулирования первое, выполненное в виде малой конической шестерни вспомогательное устройство 26 вводится через отверстие 14 в кожух, ставится на зубчатый венец 25 и фиксируется, так что малая шестерня 26 находится в зацеплении с зубчатым венцом 25 упорного кольца 19. Теперь удаляется стопорный болт 21 упорного кольца 19 и посредством вращения малой шестерни 26 упорное кольцо 19 поворачивается в одном из обоих направлений 17, 18. Малая шестерня 26 приводится в движение с помощью электродвигателя. Однако является мыслимым также перемещение вручную. Когда диапазон регулирования настроен, упорное кольцо 19 фиксируется с помощью стопорного болта 21 и вспомогательное устройство 26 удаляется. Изображенный на фиг. 7 угол между осями малой шестерни 26 и упорного кольца 19 составляет 90°. Однако мыслимы также другие углы между осями, прежде всего угол между осями, составляющий от 0° до 135°.
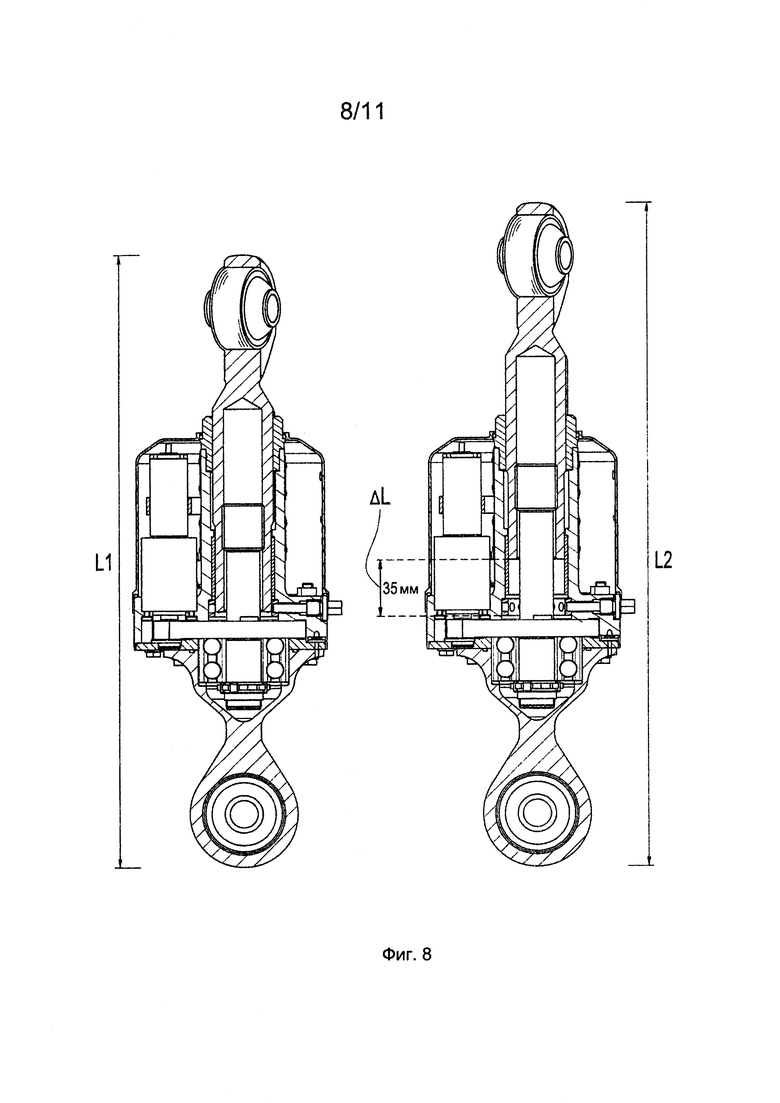
На фиг. 8 показано в виде примера максимальная регулировка тяги 1 управления. На левом изображении тяга 1 управления имеет длину L1. На правом изображении тяга 1 управления имеет длину L2. Разность ΔL составляет 35 мм.
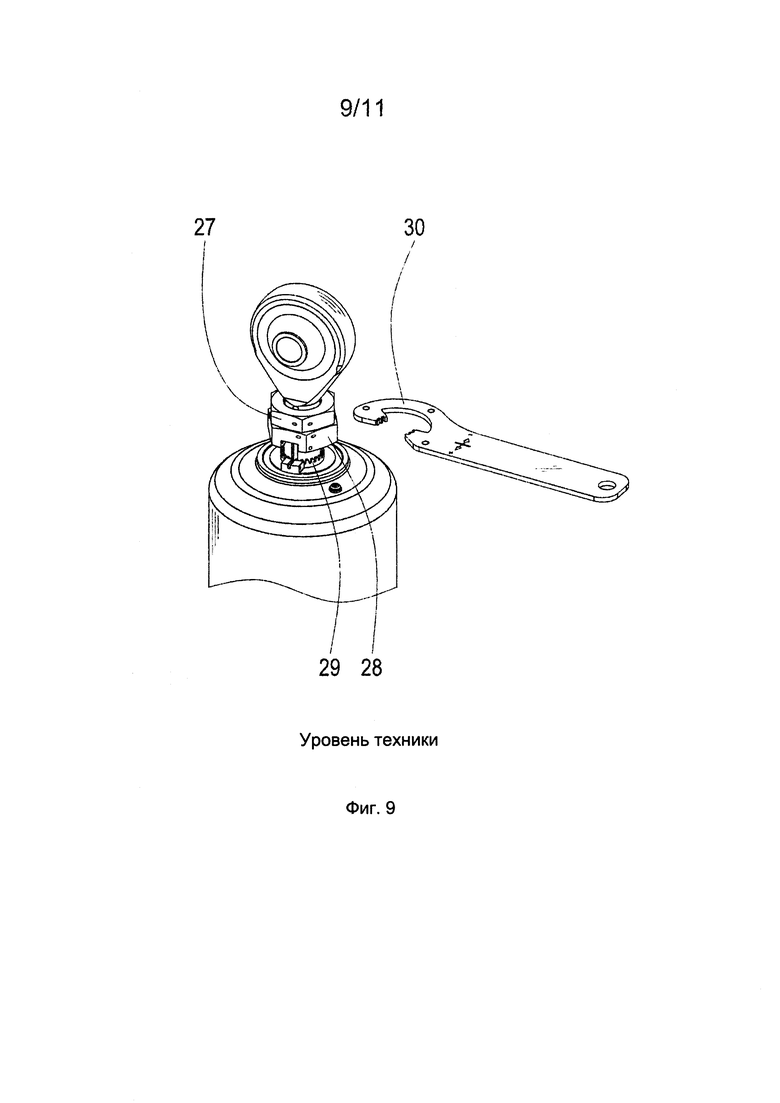
На фиг. 9 показан уровень техники. Согласно уровню техники для механической установки длины вручную отвинчивается стопорная гайка 27 и вручную приподнимается стопорное кольцо 28. Доступный после этого зубчатый венец 29 ходовой гайки может быть повернут с помощью соответствующего зубчатого ключа 30 с шагом зубчатого венца 29. Поворот на один зуб определен 5 как 1 DET. Величина поворота в DET может быть определена и проконтролирована с помощью маркировок на направляющей втулке и ходовой гайке. Если диапазон регулирования недостаточен, то верхний наконечник тяги (Rod End) должен быть расцеплен и завинчен или вывинчен соответственно на несколько оборотов. После регулировки должны быть проверены границы настройки. Выявилось, что это уровень техники является механически слишком сложным. В дополнение к этому выявилось, что регулировка для основной/предварительной настройки отнимает много времени.
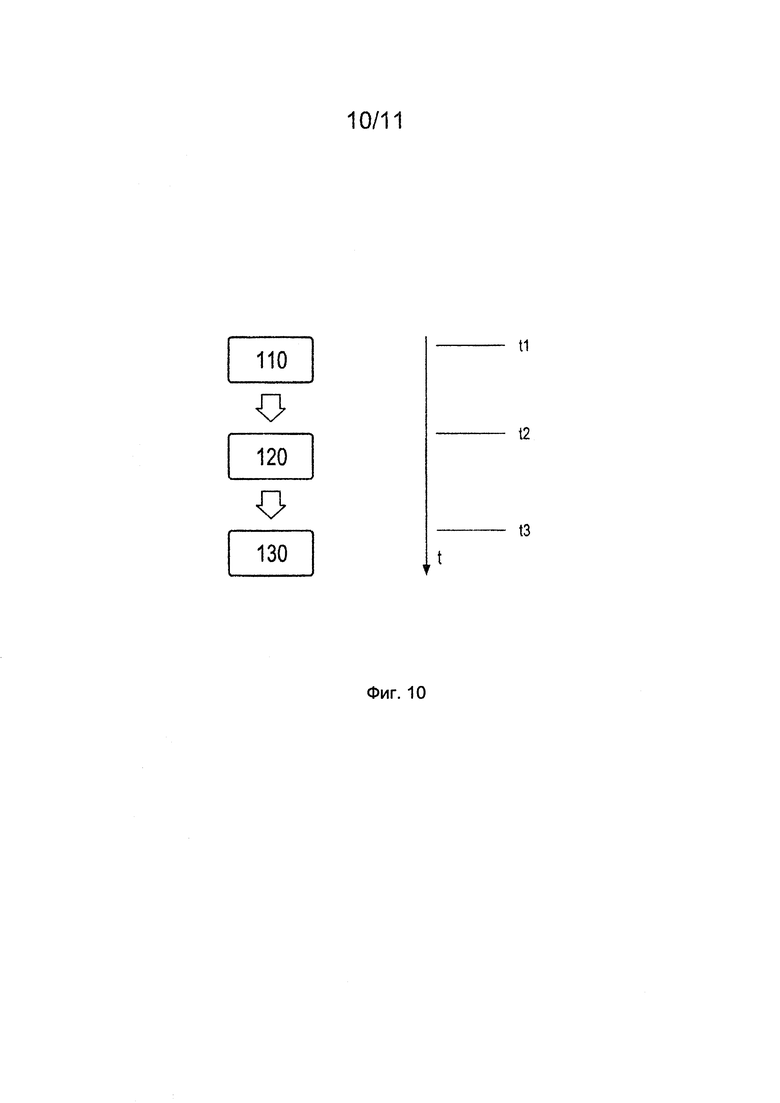
На фиг. 10 показан пример процесса способа основной/предварительной настройки согласно изобретению. На фиг. 10 сначала на первом шаге 110 в момент времени t1 по меньшей мере один выполненный в виде резьбового болта упорный элемент 8, 9 переводят из первого положения Р1 во второе положение Р2. То есть его настолько вывинчивают радиально наружу или вывинчивают полностью, что ходовой винт с элементом 15 области прилегания является свободно вращаемым. На следующем за этим в момент времени t2 втором шаге 120 тягу управления изменяют с первой длины L1, равной 295 мм, до второй длины L2, равной 330 мм, то есть на 35 мм. Возможно, конечно, также укорочение тяги управления. Мыслимы также другие длины. На следующем за этим в момент времени t3 третьем шаге 130 по меньшей мере один резьбовой болт 8, 9 переводят из второго положения Р2 в первое положение Р1, то есть завинчивают в отверстие 14 кожуха снаружи радиально внутрь. Теперь резьбовой болт снова зафиксирован и ограничивает диапазон регулирования.
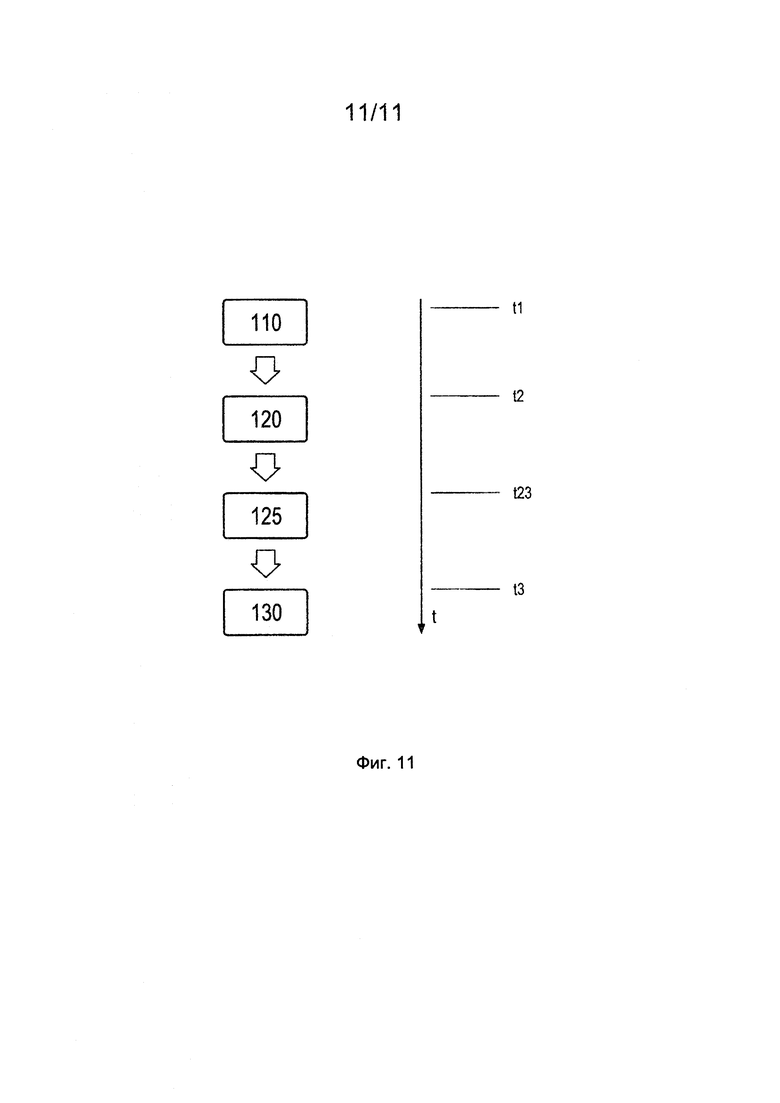
На фиг. 11 показан другой пример процесса способа основной/предварительной настройки согласно изобретению. На фиг. 11 сначала на первом шаге 110 в момент времени t1 выполненный в виде расположенного на упорном кольце 19 уступа 8 упорный элемент переводят из первого состояния Z1 во второе состояние Z2. То есть стопорный болт 21, по меньшей мере, частично извлекают из отверстия 14, 20, так что ходовой винт с элементом 15 области прилегания является свободно вращаемым. На следующем за этим в момент времени t2 втором шаге 120 тягу управления изменяют с первой длины L1, равной 295 мм, до второй длины L2, равной 330 мм, то есть на 35 мм. Возможно, конечно, также укорочение тяги управления. Мыслимы также другие длины. На следующем за этим в момент времени t3 третьем шаге 130 упорное кольцо 19 с уступом 8 снова фиксируют, то есть переводят из второго состояния Z2 в первое состояние Z1. Это осуществляют посредством того, что стопорный болт 21 вводят в отверстие 14 кожуха и в находящееся в совмещении отверстие 20 упорного кольца 19. Прежде всего, для этого может быть мыслимым дополнительный шаг 125, то есть находящийся по времени между вторым и третьим шагами 120, 130, на котором в момент времени t23 отверстие 20 упорного кольца 19 приводят в совмещение с отверстием 14 кожуха.
Помимо этого, для специалиста ясно, что представленные на фиг. 10 и 11 способы представляют собой лишь примеры способов согласно изобретению. Разумеется, мыслимы и другие шаги основной/предварительной настройки.
ПЕРЕЧЕНЬ ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
1 тяга управления
2 исполнительный элемент
3 планетарная передача
4 электродвигатель
5 ходовая гайка
6 ходовой винт
7 шестеренчатая ступень/ступень с цилиндрическими зубчатыми колесами
8 первый упорный элемент, резьбовой болт, кулачок, уступ
8А, В первая и вторая области упора первого упорного элемента
9 второй упорный элемент, резьбовой болт, кулачок, уступ
9А, В области упора второго упорного элемента
10 продольная ось резьбового болта 8
11 продольная ось резьбового болта 9
12 продольная ось тяги управления
13 кожух тяги управления
14 выемка, отверстие кожуха
15 элемент области прилегания, кулачок, уступ
15А, В первая и вторая области прилегания элемента области прилегания
16 первый несущий элемент, шестерня
17 направление вращения по часовой стрелке
18 направление вращения против часовой стрелки
19 второй несущий элемент, первое упорное кольцо
20 выемка, отверстия упорного кольца 19
21 фиксирующее средство для упорного кольца 19, стопорный болт
22 третий несущий элемент второго упорного кольца
23А, В фиксирующее средство, стопорный болт
24 верхняя сторона
25 зубчатый венец
26 вспомогательное средство, малая коническая шестерня
27 стопорная гайка
28 стопорное кольцо
29 зубчатый венец
30 зубчатый ключ
Р1, Р2 первое, второе положение
Z1, Z1 первое, второе состояние
L1, L2 первая, вторая длина
t1, t2, t3 моменты времени
| название | год | авторы | номер документа |
|---|---|---|---|
| Веломобиль | 1987 |
|
SU1512848A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ПОЛОЖЕНИЯ ЛОПАТОК С РЕГУЛИРУЕМЫМ УГЛОМ УСТАНОВКИ | 2001 |
|
RU2272913C2 |
| КРЕПЕЖНЫЙ УЗЕЛ ВЫДВИЖНОГО ЯЩИКА | 2007 |
|
RU2423901C2 |
| Устройство для заточки зубьев инструмента | 1981 |
|
SU975347A1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ С НАЖИМНОЙ ШТАНГОЙ ДЛЯ КОМПАКТНЫХ МОДУЛЕЙ С СУППОРТОМ ДИСКОВОГО ТОРМОЗНОГО МЕХАНИЗМА С УСТАНОВОЧНЫМ РЫЧАГОМ, КОТОРЫЙ ВЫПОЛНЕН С ВОЗМОЖНОСТЬЮ УПОРА В ЭЛАСТИЧНЫЙ УПОР | 2011 |
|
RU2547942C2 |
| РЕГУЛИРОВОЧНОЕ УСТРОЙСТВО И СПОСОБ РЕГУЛИРОВКИ ДЕТАЛИ | 2018 |
|
RU2728808C1 |
| УСТРОЙСТВО ДЛЯ СВИНЧИВАНИЯ ДЕТАЛЕЙ, В ЧАСТНОСТИ, ДЛЯ КОРПУСА ИЗМЕРИТЕЛЬНОГО ПРЕОБРАЗОВАТЕЛЯ | 2003 |
|
RU2289894C2 |
| УСТРОЙСТВО ДЛЯ СТОЯНКИ АВТОМОБИЛЕЙ | 2008 |
|
RU2471945C2 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ ДЛИННОМЕРНОГО МАТЕРИАЛА В ЗОНУ ОБРАБОТКИ | 1990 |
|
RU2028855C1 |
| Контроллер управления железнодорожным транспортом и способ его работы | 2022 |
|
RU2788226C1 |
Изобретение относится к тяге (1) управления для изменения шага лопасти несущего винта вертолета, причем тяга (1) управления выполнена с возможностью регулировки в продольном направлении, включающей в себя по меньшей мере один элемент (15) области прилегания, по меньшей мере один упорный элемент (8, 9), который выполнен для того, чтобы во взаимодействии по меньшей мере с одним элементом (15) области прилегания ограничивать возможность регулировки тяги (1) управления в продольном направлении задаваемым диапазоном регулирования, отличающейся тем, что упорный элемент (8, 9) выполнен с возможностью перевода из первого положения (Р1) во второе положение (Р2), причем этот по меньшей мере один упорный элемент (8, 9) в первом положении (Р1) ограничивает возможность регулировки тяги (1) управления, а во втором положении (Р2) допускает возможность регулировки тяги (1) управления за пределы задаваемого диапазона регулирования. Обеспечивается ускорение и упрощение настройки тяги управления, снижение веса тяги. 3 н. и 9 з.п. ф-лы, 11 ил.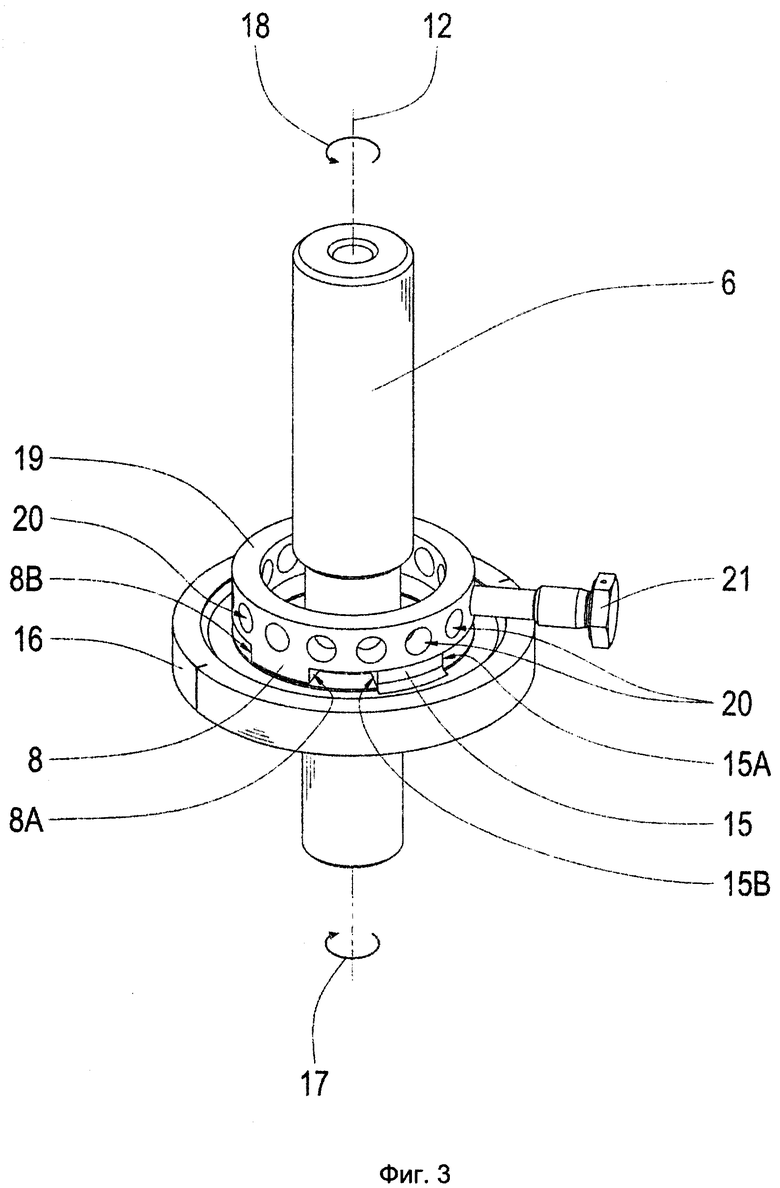
1. Тяга (1) управления для изменения шага лопасти несущего винта вертолета, причем тяга (1) управления выполнена с возможностью регулировки в продольном направлении, включающая в себя:
- по меньшей мере один элемент (15) области прилегания, расположенный с возможностью вращения вокруг продольной оси тяги (1) управления,
- по меньшей мере один упорный элемент (8, 9), который выполнен для того, чтобы во взаимодействии по меньшей мере с одним элементом (15) области прилегания ограничивать возможность регулировки тяги (1) управления в продольном направлении задаваемым диапазоном регулирования, причем по меньшей мере один упорный элемент (8, 9) выполнен с возможностью перевода из первого состояния, в котором он ограничивает возможность регулировки тяги (1) управления, во второе состояние, в котором он допускает возможность регулировки тяги (1) управления за пределы задаваемого диапазона регулирования, и наоборот,
отличающаяся тем, что в первом состоянии упорный элемент (8, 9) допускает поворот элемента (15) области прилегания в пределах диапазона вращения.
2. Тяга управления по п. 1, отличающаяся тем, что по меньшей мере один упорный элемент (8, 9) является резьбовым болтом, причем он расположен таким образом, что его продольная ось (10, 11) ориентирована, по существу, перпендикулярно продольной оси (12) тяги (1) управления, причем по меньшей мере один резьбовой болт (8, 9) выполнен с возможностью перевода в радиальном направлении из первого положения во второе положение для его перевода из первого состояния во второе состояние.
3. Тяга управления по п. 1 или 2, отличающаяся тем, что по меньшей мере один упорный элемент (8, 9) является резьбовым болтом, который выполнен с возможностью ввода в соответствующую выемку (14) кожуха тяги управления.
4. Тяга управления по п. 1, отличающаяся тем, что:
- тяга (1) управления имеет расположенный соосно с ней и с возможностью вращения вокруг ее продольной оси (12) первый несущий элемент (16) по меньшей мере с одним простирающимся в продольном направлении тяги (1) управления и прерванным в окружном направлении первым выступом, причем этот выступ образует элемент (15) области прилегания, и
- по меньшей мере один упорный элемент (8, 9) расположен по меньшей мере на одном расположенном соосно с тягой (1) управления втором несущем элементе (19), причем этот упорный элемент (8, 9) образуется посредством простирающегося в продольном направлении тяги (1) управления второго выступа,
причем в первом состоянии этот упорный элемент (8, 9) соединен с кожухом (13) тяги управления, вследствие чего в первом состоянии возможность регулировки тяги (1) управления ограничивается, а во втором состоянии это соединение разорвано, вследствие чего допускается возможность регулировки за пределы задаваемого диапазона регулирования.
5. Тяга управления по одному из предшествующих пунктов, отличающаяся тем, что тяга (1) управления выполнена с возможностью электрической регулировки в продольном направлении посредством исполнительного элемента (2).
6. Тяга управления по п. 5, отличающаяся тем, что для регулировки тяги (1) управления исполнительный элемент имеет привод с ходовым винтом, причем ходовой винт (5) привода с ходовым винтом выполнен с возможностью приведения в движение через шестеренчатую ступень (6) от приводимой в движение с помощью электродвигателя (3) планетарной передачи (2), и причем для регулировки тяги (1) управления ходовой винт (5) аксиально перемещает ходовую гайку (4).
7. Тяга управления по п. 6, отличающаяся тем, что по меньшей мере один элемент (15) области прилегания соединен без возможности вращения с шестерней (16) шестеренчатой ступени (7).
8. Тяга управления по п. 6 или 7, отличающаяся тем, что по меньшей мере один элемент (15) области прилегания выполнен неотъемлемо с шестерней (16) шестеренчатой ступени (7).
9. Тяга управления по одному из пп. 5-8, отличающаяся тем, что исполнительный элемент (2) выполнен с возможностью управления в зависимости от заданных значений и действительных положений, а также от сигналов датчиков.
10. Тяга управления по одному из предшествующих пунктов, отличающаяся тем, что для изменения задаваемого диапазона регулирования по меньшей мере один упорный элемент (15) выполнен с возможностью регулировки в окружном направлении тяги (1) управления.
11. Способ регулировки тяги (1) управления в продольном направлении, причем тяга управления включает в себя по меньшей мере один элемент (15) области прилегания, расположенный с возможностью вращения вокруг продольной оси тяги (1) управления, по меньшей мере один упорный элемент (8, 9), который выполнен для того, чтобы во взаимодействии по меньшей мере с одним элементом (15) области прилегания ограничивать возможность регулировки тяги (1) управления в продольном направлении задаваемым диапазоном регулирования, включающий в себя следующие шаги:
- на первом шаге (110) в момент времени t1 по меньшей мере один упорный элемент (8, 9) переводят из первого состояния во второе состояние, снимая ограничение диапазона регулирования,
- на втором шаге (120) в момент времени t2 тягу (1) управления переводят с первой длины (L1) на вторую длину (L2),
- на третьем шаге (130) в момент времени t3, причем t1 < t2 < t3, по меньшей мере один упорный элемент (8, 9) переводят из второго состояния в первое состояние, ограничивая диапазон регулирования.
12. Способ по п. 11, отличающийся тем, что перевод на втором шаге (120) осуществляют с помощью электродвигателя, а перевод на первом шаге (110) и третьем шаге (130) – вручную.
| US 20070166162 A1, 19.07.2007 | |||
| DE 102009001393 A1, 16.09.2010 | |||
| US 5511944 A1, 30.04.1996 | |||
| DE 202011110665 U1, 06.08.2015 | |||
| ВОЗДУШНЫЙ ВИНТ | 2014 |
|
RU2544442C1 |

