Изобретение относится к способу оказания поддержки водителю транспортного средства, в частности автомобиля промышленного назначения, согласно ограничительной части пункта 1 формулы изобретения, к устройству для оказания поддержки транспортному средству, в частности автомобилю промышленного назначения, согласно ограничительной части пункта 14 формулы изобретения, а также к транспортному средству, в частности автомобилю промышленного назначения, для осуществления способа и/или с устройством согласно пункту 15 формулы изобретения.
Известно предусматривать транспортное средство с устройством управления и/или регулировки, при помощи которого скорость транспортного средства может самостоятельно или автоматически регулироваться или контролироваться. При этом скорость транспортного средства может регулироваться или контролироваться, например таким образом, что транспортное средство всегда имеет определенное расстояние до движущегося перед транспортным средством по той же полосе движения переднего транспортного средства. Выполненное таким образом устройство управления и/или регулировки зачастую также обозначается как темпомат с регулировкой безопасной дистанции.
Задача изобретения состоит в предоставлении способа и устройства для оказания поддержки транспортному средству, в частности автомобилю промышленного назначения, при помощи которых транспортное средство может эксплуатироваться наиболее энергосберегающим образом.
Эта задача решается с помощью признаков независимых пунктов формулы изобретения. Предпочтительные усовершенствования раскрыты в зависимых пунктах формулы изобретения.
Согласно пункту 1 формулы изобретения предлагается способ оказания поддержки водителю транспортного средства, в частности автомобиля промышленного назначения, причем транспортное средство приводится в движение при помощи, по меньшей мере, одного приводного устройства, в частности двигателя внутреннего сгорания. Согласно изобретению предусмотрено устройство управления и/или регулировки, при помощи которого в основном режиме скорость транспортного средства самостоятельно или автоматически регулируется и/или контролируется таким образом, что, если транспортное средство превышает или достигает определенную максимальную скорость, то на шаге замедления транспортное средство вплоть до падения скорости ниже определенной минимальной скорости, которая меньше чем максимальная скорость, переводится в состояние с уменьшенной приводной мощностью. Кроме того, если скорость транспортного средства падает ниже определенной минимальной скорости, то на шаге ускорения транспортное средство вплоть до превышения максимальной скорости ускоряется при помощи приводного устройства, причем приводное устройство во время шага ускорения эксплуатируется по существу с максимальным коэффициентом полезного действия. При этом максимальная скорость и/или минимальная скорость устанавливаются и/или регулируются в зависимости от, по меньшей мере, одного параметра дороги и/или дорожного движения.
Таким образом, транспортное средство эксплуатируется энергосберегающим образом, так как приводное устройство не включается постоянно в неэффективном диапазоне частичных нагрузок, а работает во время шага ускорения по существу с максимальным коэффициентом полезного действия. Затем во время шага замедления транспортное средством может, например, двигаться по инерции или "катиться", пока его скорость не упадет ниже минимальной скорости или значения минимальной скорости. При падении скорости ниже минимальной скорости транспортное средство затем снова ускоряется с максимальным коэффициентом полезного действия, пока не превышается максимальная скорость или значение максимальной скорости. При этом для тяжелых транспортных средств, в частности для полностью загруженных грузовых автомобилей, соответствующий изобретению способ оказался наиболее эффективным или наиболее энергосберегающим. Кроме того, благодаря самостоятельной или автоматической регулировке и/или контролю скорости транспортного средства возможно использовать имеющийся потенциал экономии энергии постоянно максимально полностью, не отвлекая водителя, и соответственно не уменьшая его комфорт. Помимо этого благодаря установке или регулировке максимальной скорости и/или минимальной скорости в зависимости от, по меньшей мере, одного параметра дороги и/или дорожного движения обеспечивается то, что посредством использования соответствующего изобретению способа дорожное движение не тормозится и соответственно не нарушается. Наоборот теперь, например дорожное движение, окружающее транспортное средство, может приниматься во внимание при этой энергосберегающей стратегии движения.
Терминологию "максимальный коэффициент полезного действия" у выполненного в виде двигателя внутреннего сгорания приводного устройства следует понимать таким образом, что в зависимости от текущего числа оборотов двигателя внутреннего сгорания всегда устанавливается максимально возможный коэффициент полезного действия двигателя внутреннего сгорания. Этот максимально возможный коэффициент полезного действия может изменяться или может быть различным в зависимости от числа оборотов двигателя внутреннего сгорания.
Далее предпочтительно в основном режиме при помощи устройства отображения скорости транспортного средства водителю показывается изменение скорости транспортного средства с уменьшенным разрешением чем в случае, если транспортное средство не находится в основном режиме. Таким образом, комфорт водителя дополнительно увеличивается, так как водитель во время основного режима может, следовательно, меньше замечать или регистрировать изменения или колебания скорости. Отображение с уменьшенным разрешением может осуществляться, например, посредством фильтрации входных сигналов устройства отображения скорости.
Предпочтительно во время шага замедления выполненное в виде двигателя внутреннего сгорания приводное устройство эксплуатируется в режиме принудительного холостого хода. Таким образом, транспортное средство во время шага замедления может эксплуатироваться наиболее энергосберегающим образом.
Далее предпочтительно предусмотрено, по меньшей мере, одно сцепное устройство, при помощи которого приводное устройство может разъемно соединяться, по меньшей мере, с одним приводным валом транспортного средства. В этом случае во время шага замедления соединение между приводным устройством и приводным валом может быть разъединено. Во время шага ускорения соединение между приводным устройством и приводным валом может быть снова установлено. Таким образом, энергосберегающая эксплуатация транспортного средства во время шага замедления может реализовываться наиболее просто и эффективно, так как приводное устройство во время шага замедления теперь не соединено с приводным валом.
В этом случае наиболее предпочтительно во время шага замедления выполненное в виде двигателя внутреннего сгорания приводное устройство эксплуатируется с числом оборотов холостого хода, для того чтобы простым и эффективным образом реализовывать энергосберегающую эксплуатацию транспортного средства во время шага замедления. Альтернативно и/или дополнительно во время шага замедления приводное устройство может также выключаться, для того чтобы эксплуатировать транспортное средство во время шага замедления наиболее энергосберегающим образом.
В дальнейшем предпочтительном осуществлении способа, по меньшей мере, один параметр дороги и/или дорожного движения образован посредством расстояния от транспортного средства, по меньшей мере, до одного движущегося перед транспортным средством по той же полосе движения переднего транспортного средства и/или, по меньшей мере, до одного движущегося за транспортным средством по той же полосе движения заднего транспортного средства. При помощи образованного таким образом параметра дороги и/или дорожного движения может наиболее просто и эффективно предотвращаться затруднение или нарушение дорожного движения. При этом измерение расстояния до переднего транспортного средства и/или заднего транспортного средства может осуществляться при помощи известных устройств регистрации расстояния, например при помощи радиолокационных датчиков, камер или лазерных локаторов. Для определения расстояния между транспортным средством и задним транспортным средством или последующим транспортным средством в качестве устройств регистрации расстояния используются расположенные предпочтительно по бокам на транспортном средстве системы камер. Альтернативно и/или дополнительно расстояние может также определяться посредством "связи между транспортными средствами" или посредством передачи определенных при помощи заднего транспортного средства данных о расстоянии от заднего транспортного средства к транспортному средству.
Далее предпочтительно, по меньшей мере, один параметр дороги и/или дорожного движения образован посредством скорости и/или посредством ускорения, по меньшей мере, одного движущегося перед транспортным средством по той же полосе движения переднего транспортного средства и/или, по меньшей мере, одного движущегося за транспортным средством по той же полосе движения заднего транспортного средства. При помощи подобных параметров дороги и/или дорожного движения может также просто и надежно предотвращаться затруднение дорожного движения.
Далее предпочтительно, по меньшей мере, один параметр дороги и/или дорожного движения образован посредством, по меньшей мере, одного воздействующего на скорость транспортного средства дорожного происшествия и/или происшествия дорожного движения на полосе движения транспортного средства, которое в будущем достигается транспортным средством. Таким образом, транспортное средство может эксплуатироваться наиболее энергосберегающим образом, так как теперь при соответствующей изобретению регулировке или контроле скорости транспортного средства также учитываются будущие дорожные происшествия и/или происшествия дорожного движения. В этом случае максимальная скорость и/или минимальная скорость могут с учетом будущих дорожных происшествий и/или происшествий дорожного движения уже заблаговременно или перед достижением будущих дорожных происшествий и/или происшествий дорожного движения устанавливаться или регулироваться таким образом, что может сберегаться максимально возможное количество приводной энергии. При этом, по меньшей мере, одно будущее дорожное происшествие и/или происшествие дорожного движения может быть образовано, например посредством находящегося впереди ограничения скорости и/или посредством находящихся впереди и ограничивающих скорость радиусов поворотов полосы движения или посредством находящихся впереди нарушений дорожного движения, при которых скорость транспортного средства должна уменьшаться. При этом ожидаемый маршрут транспортного средства может задаваться, например, при помощи данных о повторяемости, с которой проходятся определенные маршруты, при помощи навигационных данных навигационной системы транспортного средства или при помощи данных о классе дороги. Альтернативно и/или дополнительно, по меньшей мере, один параметр дороги и/или дорожного движения может быть также образован посредством, по меньшей мере, одного правила дорожного движения. Подобным правилом дорожного движения может быть, например, запрет на обгон. При этом, по меньшей мере, одно правило дорожного движения может учитываться, например, при помощи расположенных на транспортном средстве датчиков или при помощи привязки картографических данных к имеющейся системе координат.
Наиболее предпочтительно, по меньшей мере, один параметр дороги и/или дорожного движения образован посредством уклона дорожного полотна для транспортного средства. Уклон дорожного полотна для транспортного средства имеет существенное влияние на эффективность соответствующего изобретению способа. Если уклон дорожного полотна для транспортного средства, например меньше чем определенное положительное значение уклона, то значение разности между максимальной скоростью и минимальной скоростью предпочтительно устанавливается большим, чем в случае, если уклон дорожного полотна для транспортного средства больше чем определенное положительное значение уклона. Равным образом, если уклон дорожного полотна для транспортного средства, например больше чем определенное отрицательное значение уклона, то значение разности между максимальной скоростью и минимальной скоростью устанавливается большим, чем в случае, если уклон дорожного полотна для транспортного средства меньше чем определенное отрицательное значение уклона.
В дальнейшем предпочтительном осуществлении способа, если скорость транспортного средства во время включения основного режима находится между максимальной скоростью и минимальной скоростью, то при помощи устройства управления и/или регулировки выполняется шаг ускорения.
Предпочтительно, если во время включения основного режима расстояние от транспортного средства до движущегося непосредственно перед транспортным средством по той же полосе движения переднего транспортного средства меньше чем определенное значение расстояния, то перед первым шагом замедления и первым шагом ускорения сначала выполняется шаг установки расстояния, в котором при помощи устройства управления и/или регулировки скорость транспортного средства уменьшается вплоть до достижения определенного значения расстояния. Таким образом, обеспечивается то, что транспортное средство во время соответствующей изобретению регулировки или контроля скорости транспортного средства имеет достаточное расстояние до переднего транспортного средства.
Наиболее предпочтительно в основном режиме шаг замедления и шаг ускорения выполняются попеременно друг за другом. В этом случае транспортное средство при прохождении шага замедления и шага ускорения имеет определенную среднюю скорость.
Предпочтительно, если в определенной ближней зоне в области транспортного средства, например в области с радиусом в 100 м вокруг транспортного средства, не находится движущееся перед транспортным средством по той же полосе движения переднее транспортное средство, то максимальная скорость и минимальная скорость устанавливаются таким образом, что средняя скорость соответствует скорости транспортного средства во время включения основного режима и/или установленному водителем при помощи установочного устройства значению заданной скорости. Вследствие этого транспортное средство двигается вперед с заданной водителем скоростью также во время соответствующей изобретению регулировки или контроля скорости транспортного средства.
Альтернативно и/или дополнительно, если в определенной ближней зоне транспортного средства находится движущееся перед транспортным средством по той же полосе движения переднее транспортное средство, то максимальная скорость и минимальная скорость устанавливаются таким образом, что средняя скорость и скорость переднего транспортного средства по существу идентичны. Таким образом, дополнительно повышается комфорт водителя.
Далее предпочтительно, если в определенной ближней зоне транспортного средства находится движущееся позади транспортного средства по той же полосе движения заднее транспортное средство, то значение разности между максимальной скоростью и минимальной скоростью устанавливается меньшим, чем в случае, если в определенной ближней зоне транспортного средства не находится заднее транспортное средство. Таким образом, надежно обеспечивается то, что заднее транспортное средство не тормозится или для него не создаются помехи, если заднее транспортное средство находится в ближней зоне.
Наиболее предпочтительно максимальная скорость и/или минимальная скорость самостоятельно или автоматически устанавливаются и/или регулируются при помощи устройства управления и/или регулировки в зависимости от, по меньшей мере, одного параметра дороги и/или дорожного движения. Вследствие этого обеспечивается наиболее высокий комфорт для водителя транспортного средства.
При этом предпочтительно, если за пределами определенной ближней зоны в области транспортного средства находится движущееся позади транспортного средства по той же полосе движения заднее транспортное средство, то значение разности между максимальной скоростью и минимальной скоростью самостоятельно или автоматически устанавливается и/или регулируется при помощи устройства управления и/или регулировки в зависимости от расстояния от транспортного средства до заднего транспортного средства. Таким образом, надежно предотвращается торможение заднего транспортного средства.
Альтернативно и/или дополнительно может быть также предусмотрено используемое водителем установочное устройство, при помощи которого максимальная скорость и/или минимальная скорость и/или значение разности между максимальной скоростью и минимальной скоростью могут устанавливаться и/или регулироваться. Таким образом, водитель может устанавливать или регулировать максимальную скорость и/или минимальную скорость в соответствии со своими потребностями.
Предпочтительно при помощи устройства управления и/или регулировки может также определятся характер уклона находящегося впереди или перед транспортным средством участка пути. При этом этот характер уклона может определяться, например, при помощи цифровой карты, которая может быть сохранена, например, в расположенном в транспортном средстве запоминающем устройстве или во внешнем относительно транспортного средства запоминающем устройстве, например на сервере. Предпочтительно в этом случае, по меньшей мере, при одной определенной, находящейся впереди ситуации с уклоном устройство управления и/или регулировки самостоятельно или автоматически переключается в режим уклона, в котором скорость транспортного средства автоматически регулируется и/или контролируется при помощи устройства управления и/или регулировки в зависимости от характера уклона. Таким образом, транспортное средство может эксплуатироваться наиболее энергосберегающим образом, так как при регулировке или контроле скорости транспортного средства теперь также учитывается характер уклона участка пути. Так, например уже незадолго до спуска приводная мощность для приведения в движение транспортного средства может уменьшаться, или уже перед концом спуска тормоза транспортного средства могут отпускаться. Предпочтительно тормоза у грузового автомобиля отпускаются при этом к моменту времени, при котором не превышается законно установленное максимальное время превышения скорости, и одновременно сберегается максимально возможное количество приводной энергии.
Предпочтительно предусмотрено, по меньшей мере, одно приводимое в действие водителем транспортного средства исполнительное устройство, в частности тумблер и/или выключатель, приведением в действие которого может активироваться и/или деактивироваться действенный режим устройства управления и/или регулировки, который состоит из описанного основного режима и режима ожидания. Из режима ожидания в зависимости от, по меньшей мере, одного параметра дороги и/или дорожного движения происходит переключение в основной режим, в противном случае режим ожидания активен. Подобный параметр дороги и/или дорожного движения может быть образован, например, посредством уклона находящегося впереди участка пути. Устройство управления и/или регулировки при активированном действенном режиме может переключаться в основной режим, например лишь в том случае, если уклон находящегося перед транспортным средством участка пути больше чем определенное отрицательное пороговое значение уклона и/или меньше чем определенное положительное пороговое значение уклона. При этом эти пороговые значения уклона не являются зафиксированными пороговыми значениями, а определяются системой управления в зависимости от мощности двигателя и соответствующей общей массы транспортного средства, например, извлекаясь из сохраненной таблицы. В дальнейшем шаг ускорения в основном режиме может заканчиваться, например, настолько заблаговременно, что в начале спуска имеет место минимальная скорость, или перед началом подъема шаг замедления может заканчиваться, а шаг ускорения начинаться в такой момент времени, что в начале подъема достигается максимальная скорость, чтобы транспортное средство входило в уклон с максимальным кинетическим (маховым) моментом.
Альтернативно и/или дополнительно к исполнительному устройству действенный режим может также в зависимости от рабочей ситуации транспортного средства самостоятельно или автоматически активироваться и/или деактивироваться при помощи устройства управления и/или регулировки. Вследствие этого надежно обеспечивается то, что действенный режим активируется или деактивируется в том случае, если это целесообразно. Например, действенный режим может автоматически включаться при помощи устройства управления и/или регулировки, если включается система зажигания транспортного средства, или если активируется устройство управления и/или регулировки.
В дальнейшем предпочтительном осуществлении способа транспортное средство находится в колонне из нескольких движущихся друг за другом по одной полосе движения транспортных средств, причем каждое из этих транспортных средств имеет устройство управления и/или регулировки, и, по меньшей мере, часть этих устройств управления и/или регулировки соединены друг с другом с возможностью передачи сигналов. В этом случае устройство управления и/или регулировки того транспортного средства колонны транспортных средств, чья скорость уменьшается во время шага замедления медленней всего, самостоятельно или автоматически переключается в основной режим. Затем во время шага замедления скорость, по меньшей мере, одного дальнейшего транспортного средства колонны транспортных средств адаптируется к скорости транспортного средства с переключенным в основной режим устройством управления и/или регулировки. Таким образом, соответствующая изобретению регулировка или контроль скорости транспортного средства может простым образом переноситься на целую колонну транспортных средств. Помимо этого вследствие того, что лишь устройство управления и/или регулировки того транспортного средства колонны транспортных средств, чья скорость уменьшается во время шага замедления медленней всего, переключается в основной режим, реализуется наиболее энергосберегающая эксплуатация колонны транспортных средств.
Предпочтительно устройство управления и/или регулировки самого переднего транспортного средства колонны транспортных средств самое позднее после выполнения шага замедления также автоматически переключается в основной режим. В этом случае во время шага ускорения скорость, по меньшей мере, одного транспортного средства, движущегося за самым передним транспортным средством, адаптируется к скорости самого переднего транспортного средства. Таким образом, движущееся перед колонной транспортных средств по той же полосе движения переднее транспортное средство может наиболее простым образом учитываться при соответствующей изобретению регулировке или контроле скорости транспортного средства.
Далее предпочтительно, если основной режим устройств управления и/или регулировки не активирован, то скорость, по меньшей мере, одного транспортного средства, движущегося за самым передним транспортным средством колонны транспортных средств, адаптируется к скорости самого переднего транспортного средства. Таким образом, движущееся перед колонной транспортных средств по той же полосе движения переднее транспортное средство может также наиболее просто и надежно учитываться при регулировке или контроле скорости транспортного средства. При этом предпочтительно предусмотрено то, что основной режим деактивируется, если в определенной ближней зоне самого переднего транспортного средства находится движущееся по той же полосе движения, в частности тормозящее переднее транспортное средство.
Предпочтительно каждое устройство управления и/или регулировки имеет устройство регулировки расстояния, при помощи которого скорость соответствующего транспортного средства может регулироваться и/или контролироваться таким образом, что транспортное средство имеет определенное расстояние до движущегося за транспортным средством по той же полосе движения заднего транспортного средства и/или до движущегося перед транспортным средством по той же полосе движения переднего транспортного средства.
В этом случае предпочтительно предусмотрено то, что во время шага замедления скорость, по меньшей мере, одного дальнейшего транспортного средства регулируется и/или контролируется при помощи устройства регулировки расстояния, для того чтобы наиболее простым образом регулировать скорость, по меньшей мере, одного дальнейшего транспортного средства. Альтернативно и/или дополнительно во время шага ускорения скорость транспортного средства, движущегося, по меньшей мере, за самым передним транспортным средством, может регулироваться и/или контролироваться при помощи устройства регулировки расстояния. Далее альтернативно и/или дополнительно, если основной режим устройств управления и/или регулировки не активирован, то скорость, по меньшей мере, одного транспортного средства, движущегося за самым передним транспортным средством, может также регулироваться и/или контролироваться при помощи устройства регулировки расстояния.
Предпочтительно для определения того транспортного средства колонны транспортных средств, чья скорость уменьшается во время шага замедления медленней всего, транспортные средства на определенный промежуток времени переводятся в состояние с уменьшенной приводной мощностью. Таким образом, транспортное средство колонны транспортных средств, чья скорость уменьшается во время шага замедления медленней всего, может просто и надежно определяться.
Далее для решения уже указанной задачи предлагается устройство для оказания поддержки водителю транспортного средства, в частности автомобиля промышленного назначения, причем транспортное средство может приводиться в движение при помощи, по меньшей мере, одного приводного устройства, в частности двигателя внутреннего сгорания. Согласно изобретению предусмотрено устройство управления и/или регулировки, при помощи которого в основном режиме транспортное средство может самостоятельно или автоматически регулироваться и/или управляться таким образом, что, если транспортное средство превышает или достигает определенную максимальную скорость, то на шаге замедления транспортное средство вплоть до падения скорости ниже определенной минимальной скорости, которая меньше чем максимальная скорость, переводится в состояние с уменьшенной приводной мощностью. Затем, если скорость транспортного средства падает ниже определенной минимальной скорости, то на шаге ускорения транспортное средство вплоть до превышения максимальной скорости ускоряется при помощи приводного устройства, причем приводное устройство во время шага ускорения эксплуатируется по существу с максимальным коэффициентом полезного действия. При этом максимальная скорость и/или минимальная скорость могут устанавливаться и/или регулироваться в зависимости от, по меньшей мере, одного параметра дороги и/или дорожного движения.
Получающиеся посредством соответствующего изобретению устройства преимущества идентичны уже отмеченным преимуществам соответствующего изобретению способа и не повторяются в этом месте.
Кроме того, также заявляется транспортное средство, в частности автомобиль промышленного назначения, для осуществления соответствующего изобретению способа и/или с соответствующим изобретению устройством. Проистекающие из него преимущества также идентичны уже отмеченным преимуществам соответствующего изобретению способа, так что в этом месте эти преимущества также не повторяются.
Разъясненные выше и/или отображенные в зависимых пунктах формулы изобретения предпочтительные исполнения и/или усовершенствования изобретения могут - за исключением, например случаев однозначных зависимостей или несовместимых альтернатив - использоваться по отдельности или же также в произвольной комбинации друг с другом.
Изобретение и его предпочтительные исполнения и/или усовершенствования, а также их преимущества разъясняются далее более подробно при помощи чертежа лишь в качестве примера.
На чертеже показаны:
фиг.1 - на схематичном изображении дорожные ситуации, при которых используется соответствующий изобретению способ;
фиг.2 - на изображении согласно фиг.1 дальнейшие дорожные ситуации, при которых используется соответствующий изобретению способ;
фиг.3 - диаграмма, при помощи которой разъясняется соответствующее изобретению выполнение способа;
фиг.4 - диаграмма, при помощи которой разъясняется соответствующее изобретению выполнение способа;
фиг.5а - диаграмма, при помощи которой разъясняется соответствующее изобретению выполнение способа;
фиг.5b - диаграмма, при помощи которой разъясняется соответствующее изобретению выполнение способа;
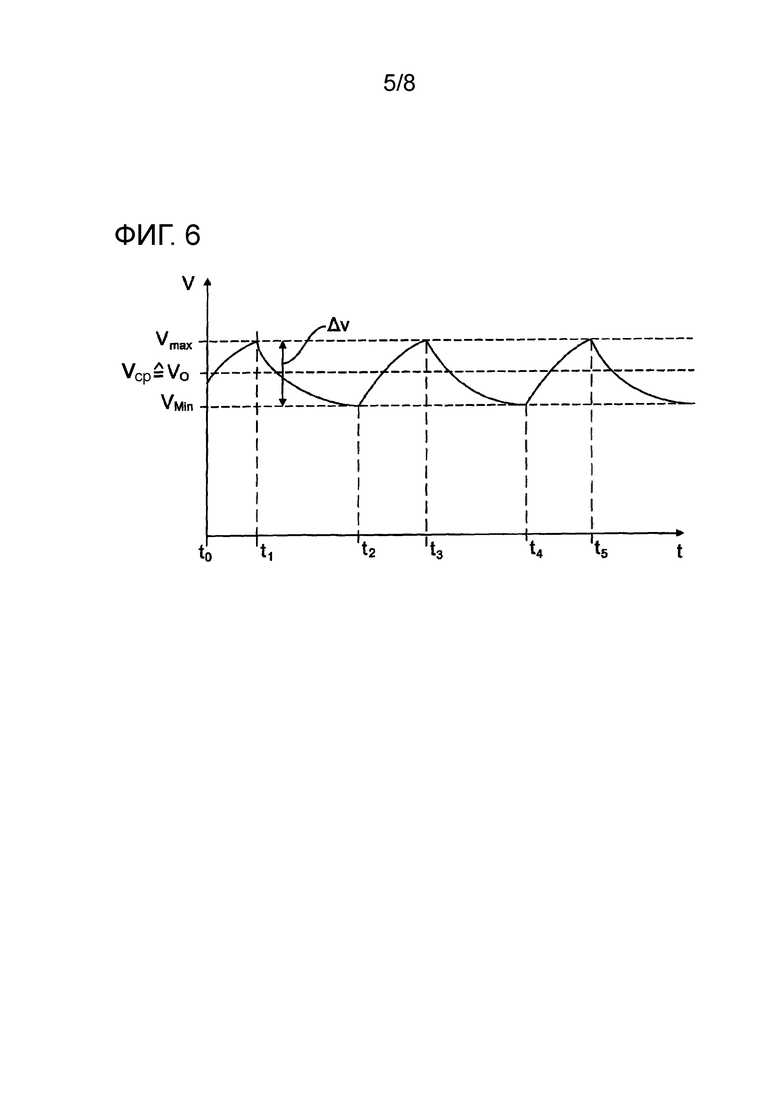
фиг.6 - диаграмма, при помощи которой разъясняется соответствующее изобретению выполнение способа;
фиг.7 - на изображении согласно фиг.1 дальнейшие дорожные ситуации, при которых используется соответствующий изобретению способ;
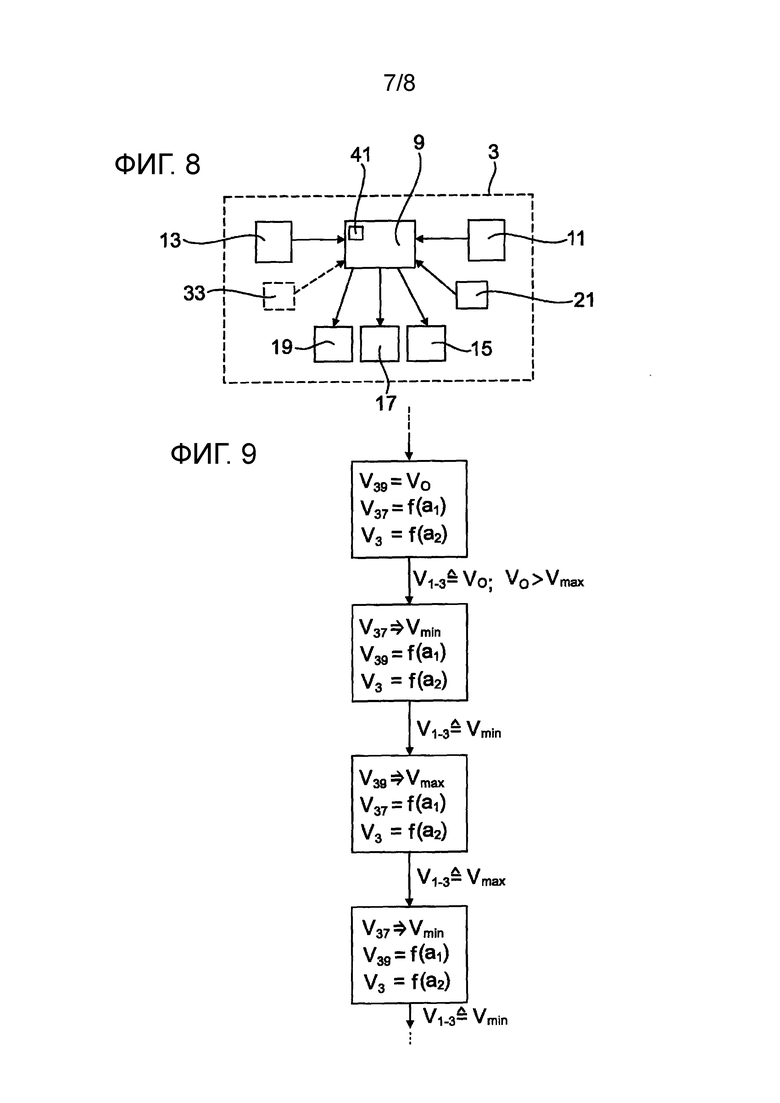
фиг.8 - на схематичном изображении структура соответствующего изобретению устройства;
фиг.9 - изображение, при помощи которого разъясняется ход соответствующего изобретению выполнения способа; и
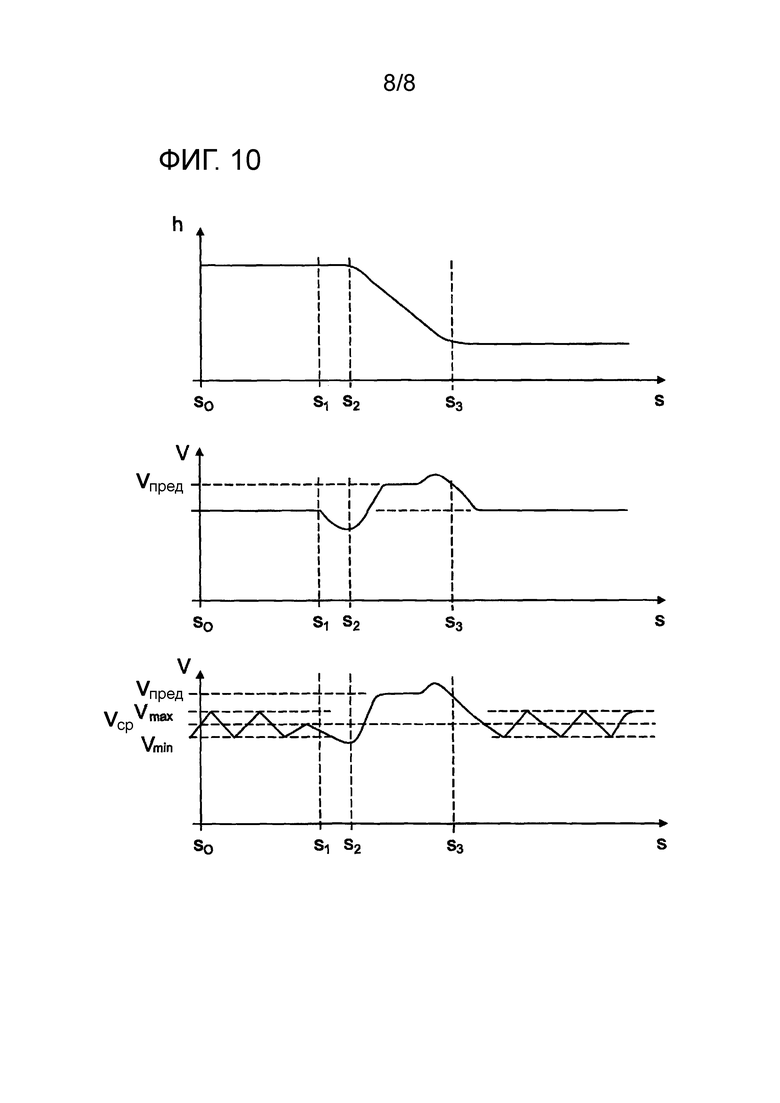
фиг.10 - диаграммы, при помощи которых разъясняется соответствующий изобретению способ.
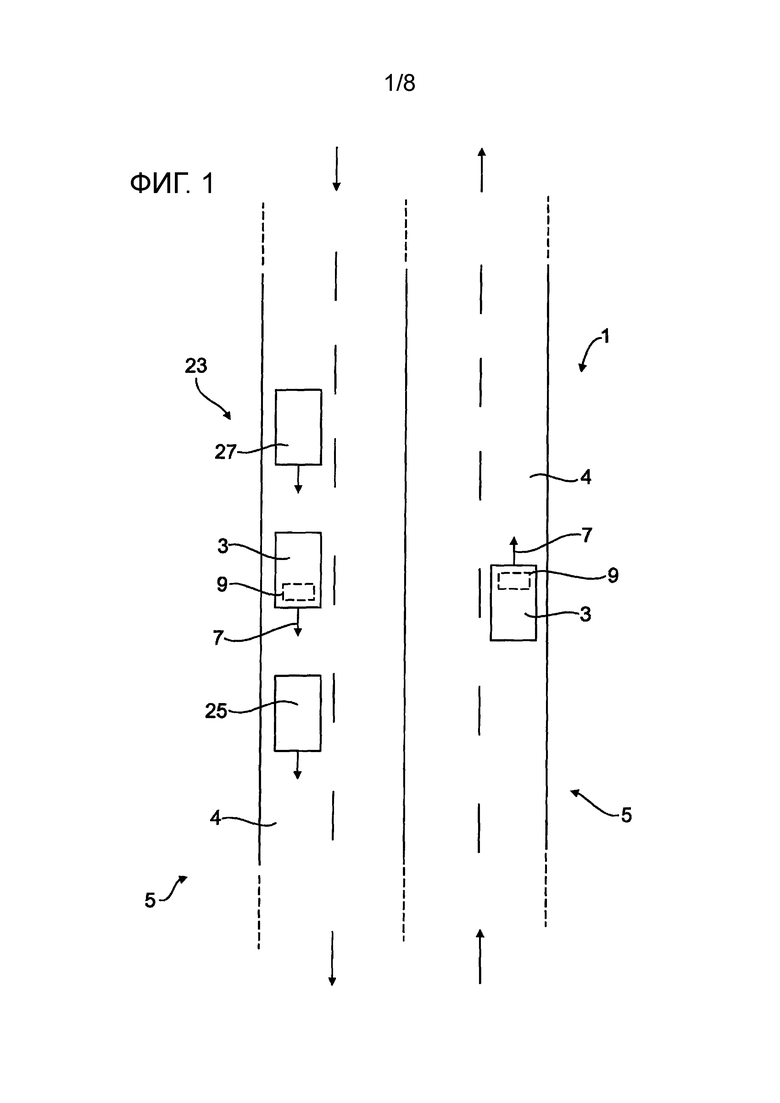
На фиг.1 показаны две дорожные ситуации, в которых может использоваться соответствующий изобретению способ. В первой дорожной ситуации 1 транспортное средство 3 находится на дорожном полотне 5 и двигается в направлении 7 движения. При этом в определенной ближней зоне в области транспортного средства 3 на полосе 4 движения транспортного средства 3 отсутствует движущееся перед транспортным средством 3, если смотреть в направлении 7 движения, переднее транспортное средство. Кроме того, в этом случае в определенной ближней зоне в области транспортного средства 3 на полосе 4 движения также отсутствует движущееся за транспортным средством 3, если смотреть в направлении 7 движения, заднее транспортное средство. Далее транспортное средство 3 имеет обозначенное пунктирными линиями устройство 9 управления и/или регулировки, при помощи которого в первой дорожной ситуации 1 скорость транспортного средства регулируется или контролируется. Принцип действия этого устройства 9 управления и/или регулировки разъясняется далее более подробно при помощи фиг.8:
Как показано на фиг.8, устройство 9 управления и/или регулировки транспортного средства 3 в данном случае в качестве примера соединено с обозначенным лишь схематично первым устройством 11 регистрации дорожного движения, при помощи которого могут определяться расстояние от транспортного средства 3 до движущегося за транспортным средством 3 по той же полосе движения заднего транспортного средства, а также скорость и ускорение заднего транспортного средства. Кроме того, устройство 9 управления и/или регулировки в данном случае в качестве примера также соединено с возможностью передачи сигналов со вторым устройством 13 регистрации дорожного движения, при помощи которого могут определяться расстояние от транспортного средства 3 до движущегося перед транспортным средством 3 по той же полосе движения переднего транспортного средства, а также скорость и ускорение переднего транспортного средства.
Далее устройство 9 управления и/или регулировки в данном случае в качестве примера также соединено с возможностью передачи сигналов с выполненным в данном случае в качестве примера в виде двигателя 15 внутреннего сгорания приводным устройством транспортного средства 3, со сцепным устройством 17 транспортного средства 3, при помощи которого двигатель 15 внутреннего сгорания может разъемно соединяться с приводным валом транспортного средства 3, и с коробкой 19 передач транспортного средства 3. Таким образом, двигатель 15 внутреннего сгорания, сцепное устройство 17 и коробка 19 передач могут в данном случае в зависимости от обнаруженных устройствами 11, 13 регистрации дорожного движения данных автоматически регулироваться или управляться при помощи устройства 9 управления и/или регулировки. Кроме того, вследствие этого в зависимости от обнаруженных устройствами 11, 13 регистрации дорожного движения данных может также автоматически при помощи устройства 9 управления и/или регулировки регулироваться или контролироваться скорость транспортного средства 3.
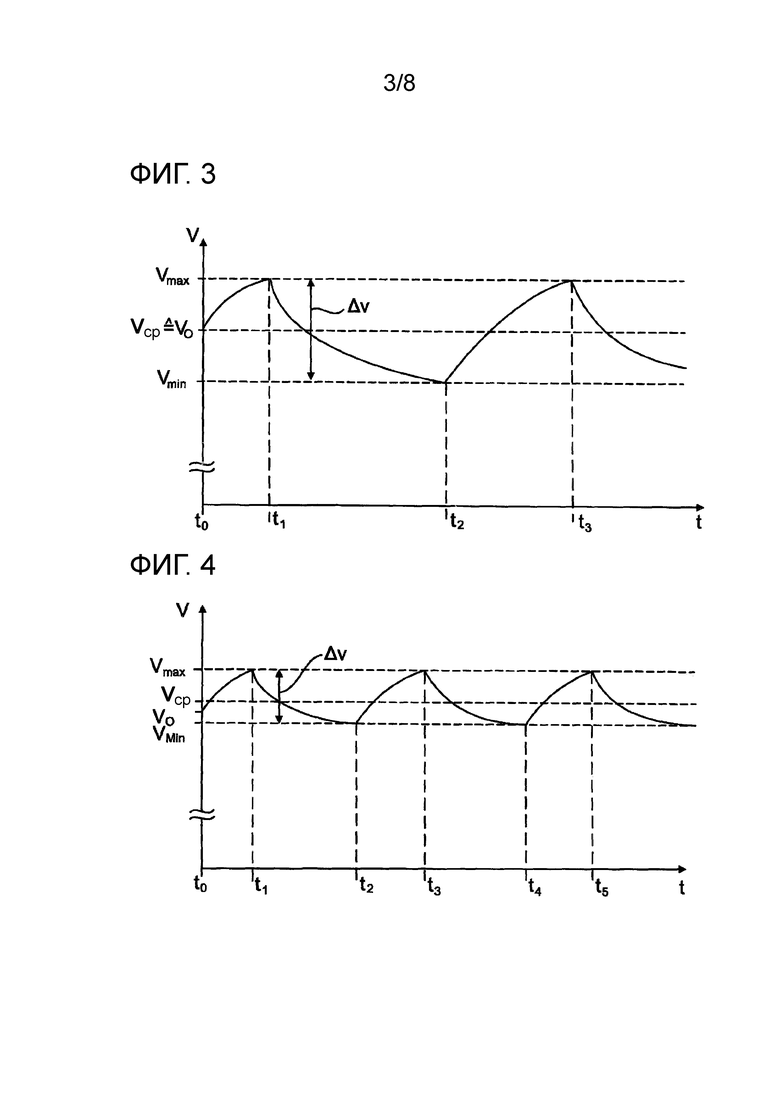
Для того чтобы реализовывать наиболее энергосберегающий режим эксплуатации транспортного средства 3, в показанной на фиг. 1 первой дорожной ситуации 1 транспортного средства 3 скорость транспортного средства автоматически регулируется или контролируется согласно показанной на фиг. 3 диаграмме при помощи устройства 9 управления и/или регулировки. Показанная на фиг. 3 диаграмма в качестве абсциссы имеет время t, а в качестве ординаты скорость V транспортного средства. При этом к моменту t0 времени включается основной режим устройства 9 управления и/или регулировки. Транспортное средство 3 к этому моменту t0 времени имеет начальную скорость V0. При этом начальная скорость V0 может быть образована, например, посредством установленной водителем при помощи установочного устройства 21 (фиг.8) заданной скорости, с которой транспортное средство 3 должно двигаться. В данном случае после включения основного режима транспортное средство 3 сначала на шаге ускорения ускоряется вплоть до превышения максимальной скорости Vmax при помощи двигателя 15 внутреннего сгорания. При этом во время этого шага ускорения двигатель 15 внутреннего сгорания при помощи устройства 9 управления и/или регулировки управляется или регулируется таким образом, что транспортное средство эксплуатируется по существу с максимальным коэффициентом полезного действия.
Если затем транспортное средство к моменту t1 времени превышает определенную максимальную скорость Vmax, то на шаге замедления транспортное средство 3 вплоть до падения скорости ниже определенной минимальной скорости Vmin, которая задана меньшей чем начальная скорость V0, переводится в состояние с уменьшенной приводной мощностью. Во время этого шага замедления в данном случае в качестве примера разомкнуто сцепное устройство 17 (фиг.8) транспортного средства 3. В этом случае двигатель 15 внутреннего сгорания эксплуатируется затем с числом оборотов холостого хода. Однако альтернативно было бы также, например, возможно глушить двигатель 15 внутреннего сгорания во время шага замедления или эксплуатировать двигатель 15 внутреннего сгорания во время шага замедления в режиме буксировки.
Если затем скорость транспортного средства 3 к моменту t2 времени падает ниже определенной минимальной скорости Vmin, то выполняется дальнейший шаг ускорения. Затем снова выполняется шаг замедления. Таким образом, в данном случае в основном режиме шаг замедления и шаг ускорения выполняются попеременно друг за другом. Следовательно, в данном случае показанная на фиг. 3 кривая скорости имеет форму зубьев пилы. Далее транспортное средство 3 при выполнении отдельного шага замедления и отдельного шага ускорения имеет среднюю скорость Vср. В показанной на фиг. 1 первой дорожной ситуации 1 максимальная скорость Vmax и минимальная скорость Vmin выбраны в данном случае таким образом, что средняя скорость Vср соответствует начальной скорости V0. Таким образом, транспортное средство 3 после включения основного режима двигается вперед в среднем далее с начальной скоростью V0. Кроме того, разность Δv между максимальной скоростью Vmax и минимальной скоростью Vmin выполнена в данном случае максимально большой, так как в показанной на фиг.1 первой дорожной ситуации 1 переднее транспортное средство и заднее транспортное средство отсутствуют в определенной ближней зоне транспортного средства 3. Разность Δv выбрана в данном случае таким образом, что она еще приемлема для водителя транспортного средства 3. У выполненного в виде грузового автомобиля транспортного средства 3 средняя скорость Vср может составлять, например 85 км/ч, а разность Δv 8 км/ч.
Далее на фиг.1 также показана вторая дорожная ситуация 23 транспортного средства 3. В этой дорожной ситуации 23 в определенной ближней зоне транспортного средства 3 находится как движущееся перед транспортным средством 3 переднее транспортное средство 25, так и движущееся за транспортным средством 3 заднее транспортное средство 27 на полосе 4 движения транспортного средства 3. В данном случае в основном режиме скорость транспортного средства 3 регулируется или контролируется затем согласно показанной на фиг.4 диаграмме при помощи устройства 9 управления и/или регулировки. По сравнению с регулировкой скорости согласно фиг.3 средняя скорость Vср транспортного средства 3 в данном случае не соответствует начальной скорости V0 транспортного средства 3. В данном случае средняя скорость Vср адаптирована к скорости переднего транспортного средства 25 или идентична скорости переднего транспортного средства 25. Кроме того, в данном случае разность Δv скоростей выполнена меньшей, чем при регулировке скорости согласно фиг.3. Таким образом, задержка заднего транспортного средства 27 предотвращается или уменьшается в основном режиме устройства 9 управления и/или регулировки. Конкретно в данном случае разность Δv скоростей у выполненного в виде грузового автомобиля транспортного средства 3 может составлять, например 4 км/ч.
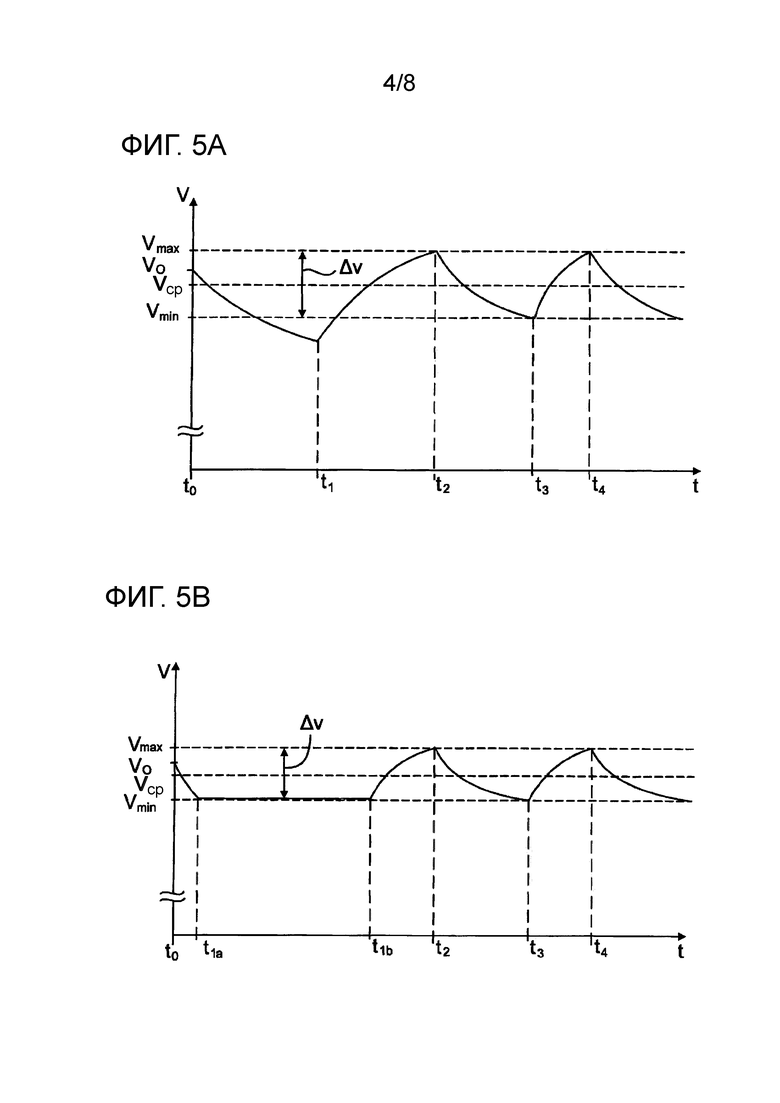
Альтернативно показанной на фиг.4 регулировке скорости при показанной на фиг.1 второй дорожной ситуации 23 могла бы также использоваться показанная на фиг.5а регулировка скорости. По сравнению с показанной на фиг.4 регулировкой скорости в данном случае перед первым шагом ускорения сначала выполняется шаг установки расстояния, в котором при помощи устройства 9 управления и/или регулировки скорость транспортного средства 3 уменьшается вплоть до достижения определенного значения расстояния. Подобный шаг установки расстояния может быть необходим, например, в том случае, если к моменту t0 времени расстояние от транспортного средства 3 до переднего транспортного средства 25 явно слишком мало. В остальном показанная на фиг.5а регулировка скорости соответствует показанной на фиг.4 регулировке скорости. Альтернативно показанной на фиг.5а регулировке скорости может также выполняться увеличение расстояния, например согласно фиг.5b, для того чтобы скорость не падала ниже минимальной скорости Vmin.
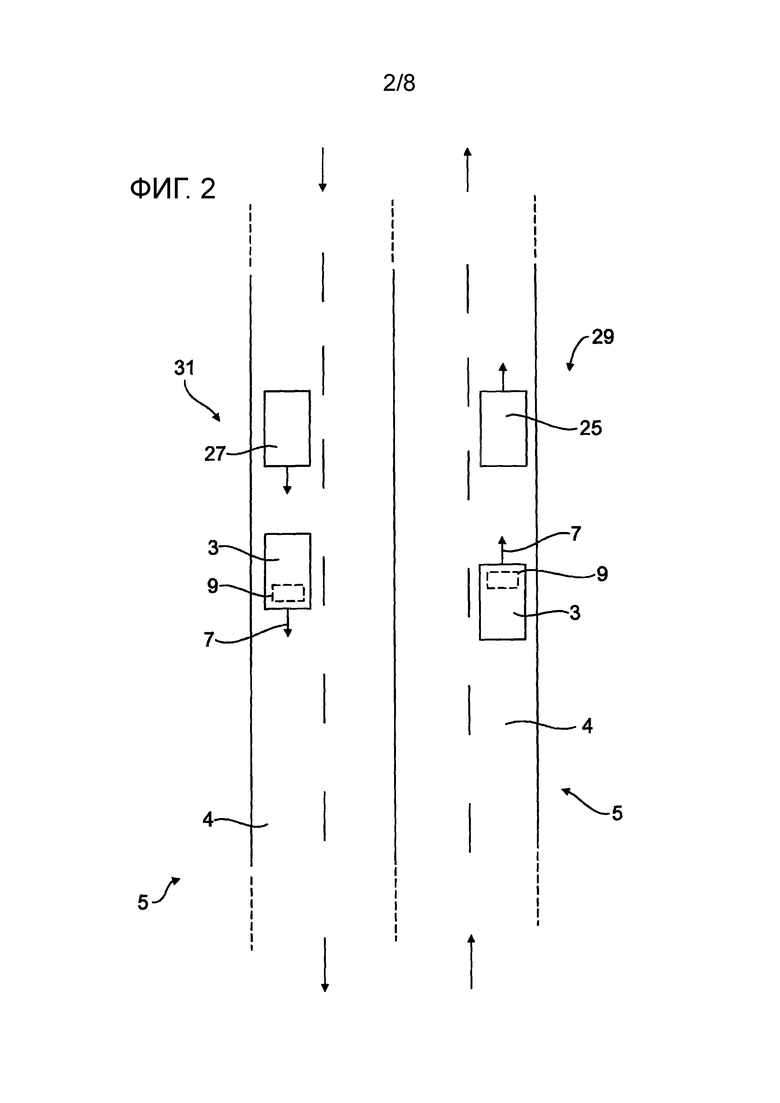
На фиг.2 показана третья дорожная ситуация 29 транспортного средства 3. В этой дорожной ситуации 29 находится лишь переднее транспортное средство 25 в определенной ближней зоне транспортного средства 3 на полосе 4 движения. В основном режиме устройства 9 управления и/или регулировки скорость транспортного средства 3 в данном случае в качестве примера регулируется или контролируется согласно показанной на фиг.4 или фиг.5 регулировке скорости, за исключением того, что разность Δv скоростей выбрана согласно показанной на фиг.3 регулировке скорости.
Далее на фиг.2 также показана четвертая дорожная ситуация 31 транспортного средства 3. В этой дорожной ситуации 31 находится лишь заднее транспортное средство 27 в определенной ближней зоне транспортного средства 3 на полосе 4 движения. В основном режиме скорость транспортного средства 3 в данном случае в качестве примера регулируется или контролируется при помощи устройства 9 управления и/или регулировки согласно показанной на фиг.6 регулировке скорости. По сравнению с показанной на фиг.3 регулировкой скорости в данном случае разность Δv между максимальной скоростью Vmax и минимальной скоростью Vmin уменьшена.
Кроме того, в данном случае максимальная скорость Vmax и минимальная скорость Vmin самостоятельно или автоматически устанавливаются или регулируются при помощи устройства 9 управления и/или регулировки в зависимости от обнаруженных устройствами 11, 13 регистрации дорожного движения данных. Однако альтернативно и/или дополнительно было бы также, например, возможно устанавливать максимальную скорость Vmax и/или минимальную скорость Vmin при помощи обозначенного на фиг.8 пунктирными линиями установочного устройства 33.
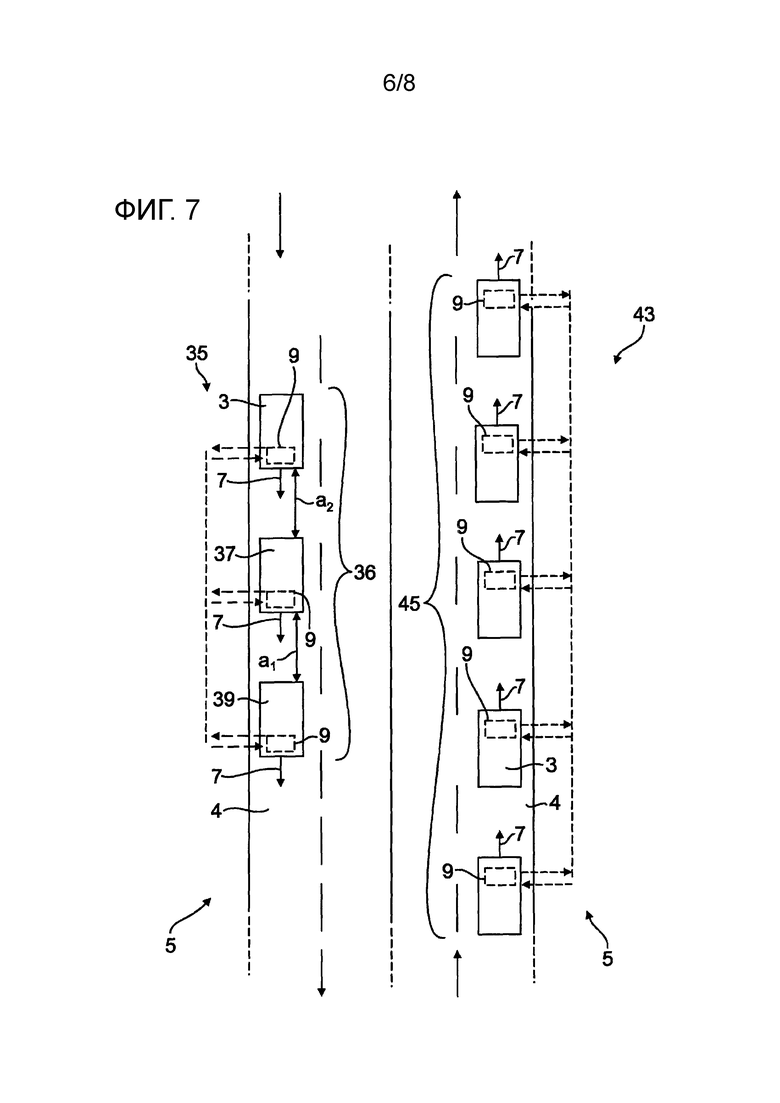
На фиг.7 показана пятая дорожная ситуация 35 транспортного средства 3. При этом транспортное средство 3 находится в колонне 36 из нескольких, в данном случае в качестве примера трех, движущихся друг за другом по одной полосе 4 движения транспортных средств 3, 37, 39. Каждое из этих транспортных средств 3, 37, 39 имеет устройство 9 управления и/или регулировки и двигается в направлении 7 движения. В данном случае устройства 9 управления и/или регулировки соединены друг с другом с возможностью передачи сигналов. Если основной режим устройств 9 управления и/или регулировки не активирован, то скорости транспортных средств 3, 37, движущихся за самым передним транспортным средством 39 колонны транспортных средств, регулируются или контролируются в данном случае при помощи устройства 41 регулировки расстояния (фиг.8) соответствующего устройства 9 управления и/или регулировки. При помощи устройств 41 регулировки расстояния скорости транспортных средств 3, 37, 39 могут регулироваться или контролироваться таким образом, что соответствующее транспортное средство всегда имеет определенное значение расстояния до движущегося непосредственно перед транспортным средством по той же полосе движения переднего транспортного средства или до движущегося непосредственно за транспортным средством по той же полосе движения заднего транспортного средства.
Если транспортные средства 3, 37, 39 колонны 36 транспортных средств должны эксплуатироваться наиболее энергосберегающим образом, сначала определяется то транспортное средство колонны 36 транспортных средств, чья скорость уменьшается во время шага замедления медленней всего. Для этого транспортные средства 3, 37, 39 в данном случае в качестве примера переводятся на определенный промежуток времени в состояние с уменьшенной приводной мощностью. В показанной на фиг.7 дорожной ситуации 35 тем транспортным средством, чья скорость уменьшается во время шага замедления медленней всего, и соответственно "самым быстрым" транспортным средством колонны 36 транспортных средств в данном случае в качестве примера является движущееся между самым задним транспортным средством 3 и самым передним транспортным средством 39 транспортное средство 37, так как оно подвержено самому низкому сопротивлению воздуха. Если теперь колонна 36 транспортных средств должна эксплуатироваться наиболее энергосберегающим образом, то устройство 9 управления и/или регулировки "самого быстрого" транспортного средства 37 самостоятельно или автоматически переключается в основной режим. Затем во время шага замедления скорости других транспортных средств 3, 39 колонны 36 транспортных средств адаптируются при помощи устройств 41 регулировки расстояния транспортных средств 3, 39 к скорости "самого быстрого" транспортного средства 37.
Кроме того, в данном случае в качестве примера устройство 9 управления и/или регулировки самого переднего транспортного средства 39 колонны 36 транспортных средств самое позднее после выполнения шага замедления также самостоятельно или автоматически переключается в основной режим. Затем во время шага ускорения скорости транспортных средств 3, 37, движущихся за самым передним транспортным средством 39, адаптируются при помощи устройств 41 регулировки расстояния транспортных средств 3, 37 к скорости самого переднего транспортного средства 39.
Подводя итог, регулировка скорости транспортных средств 3, 37, 39 колонны 36 транспортных средств разъясняется в дальнейшем еще раз при помощи фиг.9:
Прежде чем устройство 9 управления и/или регулировки "самого быстрого" транспортного средства 37 переключится в основной режим, скорость самого переднего транспортного средства 39 колонны 36 транспортных средств в данном случае в качестве примера образована посредством начальной скорости V0, установленной водителем транспортного средства 39 при помощи установочного устройства 21 транспортного средства 39. Скорости транспортных средств 3, 37, движущихся за самым передним транспортным средством 39 колонны транспортных средств, автоматически регулируются или контролируются при помощи устройств 41 регулировки расстояния этих транспортных средств 3, 37. При этом скорость транспортного средства 37 регулируется или контролируется таким образом, что расстояние a1 между транспортным средством 37 и транспортным средством 39, движущимся непосредственно перед транспортным средством 37, всегда имеет определенное значение расстояния. При этом скорость транспортного средства 3 регулируется или контролируется таким образом, что также расстояние a2 между транспортным средством 3 и транспортным средством 37, движущимся непосредственно перед транспортным средством 3, всегда имеет определенное значение расстояния.
Если теперь устройство 9 управления и/или регулировки "самого быстрого" транспортного средства 37 переключается в основной режим, и сначала выполняется шаг замедления, то скорости движущегося перед "самым быстрым" транспортным средством 37 транспортного средства 39 и движущегося за "самым быстрым" транспортным средством 37 транспортного средства 3 автоматически регулируются или контролируются при помощи устройств 41 регулировки расстояния этих транспортных средств 3, 39. При этом скорость транспортного средства 39 регулируется или контролируется таким образом, что расстояние a1 между транспортным средством 39 и транспортным средством 37, движущимся за транспортным средством 39, всегда имеет определенное значение расстояния. При этом скорость транспортного средства 3 регулируется или контролируется таким образом, что также расстояние a2 между транспортным средством 3 и транспортным средством 37 всегда имеет определенное значение расстояния.
Затем при последующем шаге ускорения скорости транспортных средств 3, 37, движущихся за самым передним транспортным средством 39 колонны транспортных средств, автоматически регулируются или контролируются при помощи устройств 41 регулировки расстояния транспортных средств 3, 37. Наконец, при последующем шаге замедления скорости транспортных средств 3, 39 автоматически регулируются или контролируются при помощи устройств 41 регулировки расстояния транспортных средств 3, 39.
Далее на фиг.7 также показана шестая дорожная ситуация 43. В этой дорожной ситуации 43 транспортное средство 3 находится в колонне 45 транспортных средств. Однако по сравнению с показанной на фиг.7 пятой дорожной ситуацией 35 колонна 45 транспортных средств в данном случае состоит не из трех, а из пяти транспортных средств. Регулировка скорости транспортных средств колонны 45 осуществляется в данном случае идентично регулировке скорости колонны 36 транспортных средств согласно пятой дорожной ситуации 35.
Далее при помощи устройства 9 управления и/или регулировки транспортного средства 3 в данном случае в качестве примера может также определяться характер уклона находящегося впереди или перед транспортным средством участка пути. В этом случае, по меньшей мере, при одной определенной, находящейся впереди ситуации с уклоном устройство 9 управления и/или регулировки самостоятельно или автоматически переключается в режим уклона, в котором скорость транспортного средства самостоятельно или автоматически регулируется или контролируется при помощи устройства 9 управления и/или регулировки в зависимости от характера уклона.
Эта регулировка или контроль скорости транспортного средства в зависимости от характера уклона разъясняется далее в качестве примера при помощи фиг. 10:
На фиг.10 показана диаграмма 47, на которой изображена примерная кривая высоты дорожного полотна 4 транспортного средства 3. Диаграмма 47 в качестве абсциссы имеет дистанцию s, а в качестве ординаты высоту h участка пути. В данном случае между точкой s0 дистанции и точкой s2 дистанции дорожное полотно 4 по существу не имеет уклона или имеет уклон в 0°. Между точкой s2 дистанции и точкой s3 дистанции дорожное полотно 4 имеет спуск или отрицательный уклон. После точки s3 дистанции дорожное полотно 4 снова не имеет уклона.
В этом случае в режиме уклона скорость транспортного средства 3 регулируется согласно показанной на фиг.10 диаграмме 49. При этом здесь уже в расположенной перед точкой s2 дистанции точке s1 дистанции уменьшается приводная мощность для приведения в движение транспортного средства 3 и таким образом также скорость транспортного средства, для того чтобы экономить приводную энергию. В данном случае на спуске дорожного полотна 4 скорость транспортного средства ограничена предельной скоростью Vпред. Уже незадолго до точки s3 дистанции тормоза транспортного средства 3 в данном случае отпускаются, так что транспортное средство 3 в данном случае приобретает на спуске маховый момент. Таким образом, обеспечивается наиболее энергосберегающая эксплуатация транспортного средства 3. В показанной на фиг.10 диаграмме 51 перед точкой s1 дистанции и после точки s3 дистанции активирован основной режим устройства 9 управления и/или регулировки транспортного средства 3. Между точкой s1 дистанции и точкой s3 дистанции в данном случае активирован режим уклона устройства 9 управления и/или регулировки.
СПИСОК ССЫЛОЧНЫХ ПОЗИЦИЙ
1 первая дорожная ситуация
3 транспортное средство
4 полоса движения
5 дорожное полотно
7 направление движения
9 устройство управления и/или регулировки
11 первое устройство регистрации дорожного движения
13 второе устройство регистрации дорожного движения
15 двигатель внутреннего сгорания
17 сцепное устройство
19 коробка передач
21 установочное устройство
23 вторая дорожная ситуация
25 переднее транспортное средство
27 заднее транспортное средство
29 третья дорожная ситуация
31 четвертая дорожная ситуация
33 установочное устройство
35 пятая дорожная ситуация
36 колонна транспортных средств
37 транспортное средство
39 транспортное средство
41 устройство регулировки расстояния
43 шестая дорожная ситуация
45 колонна транспортных средств
47 диаграмма
49 диаграмма
51 диаграмма
h высота
s дистанция
s0 точка дистанции
s1 точка дистанции
s2 точка дистанции
s3 точка дистанции
t время
V скорость транспортного средства
Vср средняя скорость
Vпред предельная скорость
Vmax максимальная скорость
Vmin минимальная скорость
V0 начальная скорость
Δv разность скоростей.
Изобретение относится к системам управления транспортного средства. Способ оказания поддержки водителю транспортного средства, причем транспортное средство приводится в движение при помощи по меньшей мере одного приводного устройства. В транспортном средстве предусмотрено устройство управления и/или регулировки, при помощи которого в основном режиме скорость транспортного средства автоматически регулируют и/или управляют таким образом, что если транспортное средство превышает или достигает определенную максимальную скорость, то на шаге замедления транспортное средство вплоть до падения скорости ниже определенной минимальной скорости, которая меньше чем максимальная скорость, переводят в состояние с уменьшенной приводной мощностью, если скорость транспортного средства падает ниже определенной минимальной скорости, то на шаге ускорения транспортное средство вплоть до превышения максимальной скорости ускоряют при помощи приводного устройства. Приводное устройство во время шага ускорения эксплуатируют по существу с максимальным коэффициентом полезного действия. Максимальную скорость и/или минимальную скорость устанавливают и/или регулируют в зависимости от по меньшей мере одного параметра дороги и/или дорожного движения. Достигается повышение безопасности управления транспортным средством. 3 н. и 12 з.п. ф-лы, 10 ил.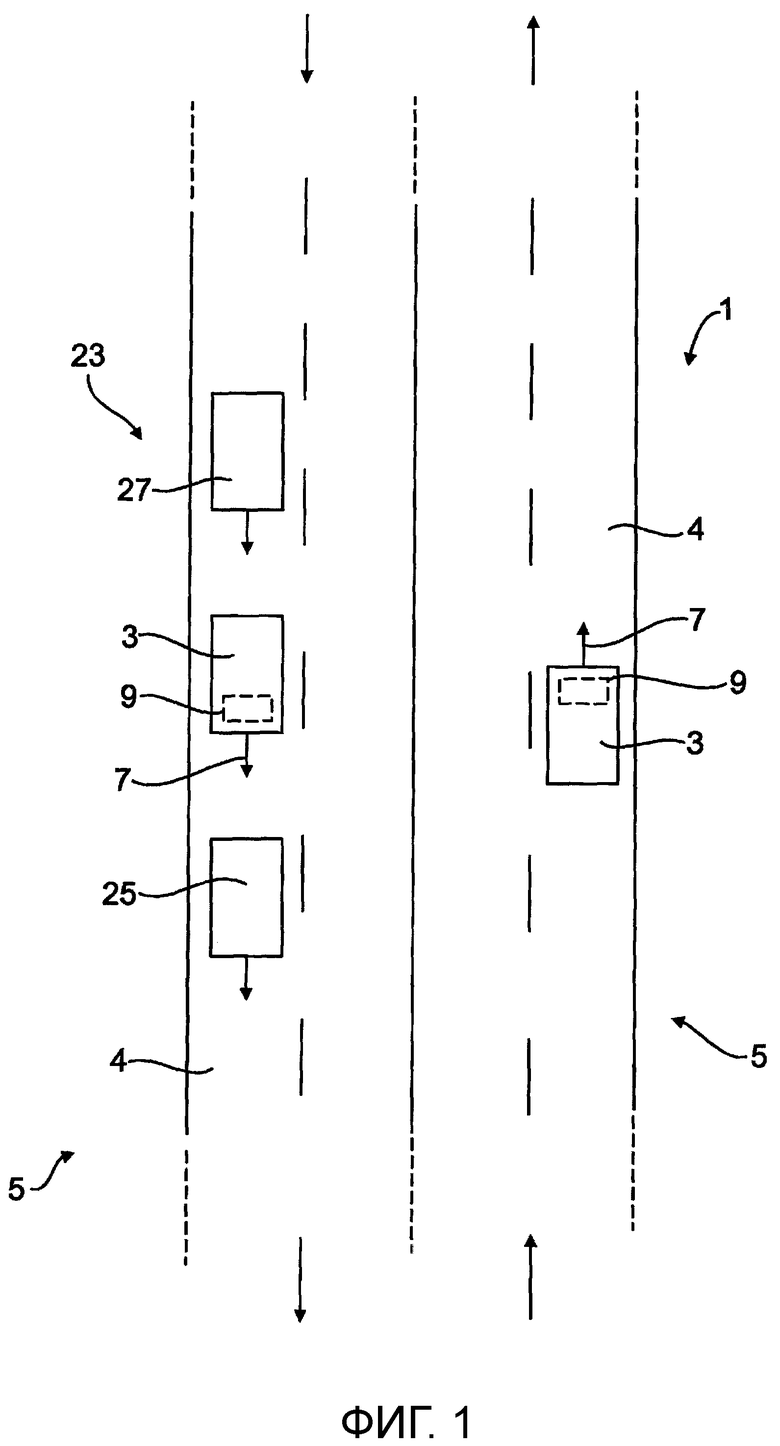
1. Способ оказания поддержки водителю транспортного средства, в частности автомобиля промышленного назначения, причем транспортное средство (3) приводится в движение при помощи по меньшей мере одного приводного устройства (15), в частности двигателя внутреннего сгорания,
отличающийся тем, что
предусмотрено устройство (9) управления и/или регулировки, при помощи которого в основном режиме скорость транспортного средства (3) автоматически регулируют и/или управляют таким образом,
что если транспортное средство (3) превышает или достигает определенную максимальную скорость (Vmax), то на шаге замедления транспортное средство (3) вплоть до падения скорости ниже определенной минимальной скорости (Vmin), которая меньше чем максимальная скорость (Vmax), переводят в состояние с уменьшенной приводной мощностью,
что если скорость транспортного средства (3) падает ниже определенной минимальной скорости (Vmin), то на шаге ускорения транспортное средство (3) вплоть до превышения максимальной скорости (Vmax) ускоряют при помощи приводного устройства, причем приводное устройство (15) во время шага ускорения эксплуатируют по существу с максимальным коэффициентом полезного действия, и
что максимальную скорость (Vmax) и/или минимальную скорость (Vmin) устанавливают и/или регулируют в зависимости от по меньшей мере одного параметра дороги и/или дорожного движения.
2. Способ по п. 1, отличающийся тем, что во время шага замедления выполненное в виде двигателя внутреннего сгорания приводное устройство (15) эксплуатируют в режиме принудительного холостого хода.
3. Способ по п. 1, отличающийся тем, что предусмотрено сцепное устройство (17), при помощи которого приводное устройство (15) может разъемно соединяться по меньшей мере с одним приводным валом транспортного средства (3), причем во время шага замедления соединение между приводным устройством (15) и приводным валом разъединено, и причем во время шага ускорения соединение между приводным устройством (15) и приводным валом установлено.
4. Способ по п. 3, отличающийся тем, что во время шага замедления выполненное в виде двигателя внутреннего сгорания приводное устройство (15) эксплуатируют с числом оборотов холостого хода, и/или что во время шага замедления приводное устройство (15) выключают.
5. Способ по любому из пп. 1-4, отличающийся тем, что если во время включения основного режима расстояние от транспортного средства (3) до движущегося непосредственно перед транспортным средством (3) по той же полосе (4) движения переднего транспортного средства (25) меньше, чем определенное значение расстояния, то сначала выполняют шаг установки расстояния, в котором при помощи устройства (9) управления и/или регулировки автоматически уменьшают скорость транспортного средства вплоть до достижения определенного значения расстояния.
6. Способ по п. 1, отличающийся тем, что в основном режиме шаг замедления и шаг ускорения выполняют попеременно, и что транспортное средство (3) при прохождении шага замедления и шага ускорения имеет определенную среднюю скорость.
7. Способ по п. 6, отличающийся тем, что если в определенной ближней зоне в области транспортного средства (3) не находится движущееся перед транспортным средством (3) по той же полосе (4) движения переднее транспортное средство (25), то максимальную скорость (Vmax) и минимальную скорость (Vmin) устанавливают таким образом, что средняя скорость соответствует скорости транспортного средства во время включения основного режима и/или установленному водителем при помощи установочного устройства (21) значению заданной скорости.
8. Способ по п. 6 или 7, отличающийся тем, что если в определенной ближней зоне в области транспортного средства (3) находится движущееся перед транспортным средством (3) по той же полосе (4) движения переднее транспортное средство (25), то максимальную скорость (Vmax) и минимальную скорость (Vmin) устанавливают таким образом, что средняя скорость и скорость переднего транспортного средства (25) по существу идентичны.
9. Способ по п. 1, отличающийся тем, что если в определенной ближней зоне в области транспортного средства (3) находится движущееся позади транспортного средства (3) по той же полосе (4) движения заднее транспортное средство (27), то значение (Δv) разности между максимальной скоростью (Vmax) и минимальной скоростью (Vmin) устанавливают меньшим, чем в случае, если в определенной ближней зоне транспортного средства (3) не находится заднее транспортное средство (27).
10. Способ по п. 1, отличающийся тем, что максимальную скорость (Vmax) и/или минимальную скорость (Vmin) в зависимости от по меньшей мере одного параметра дороги и/или дорожного движения автоматически устанавливают и/или регулируют при помощи устройства (9) управления и/или регулировки.
11. Способ по п. 1, отличающийся тем, что предусмотрено используемое водителем установочное устройство (33), при помощи которого имеется возможность установки максимальной скорости (Vmax), и/или минимальной скорости (Vmin), и/или значения (Δv) разности между максимальной скоростью (Vmax) и минимальной скоростью (Vmin).
12. Способ по п. 1, отличающийся тем, что транспортное средство (3) находится в колонне (36, 45) из нескольких движущихся друг за другом по одной полосе (4) движения транспортных средств (3, 37, 39),
причем каждое из этих транспортных средств (3, 37, 39) имеет устройство (9) управления и/или регулировки, и по меньшей мере часть этих устройств (9) управления и/или регулировки связаны друг с другом с возможностью передачи сигналов,
причем устройство (9) управления и/или регулировки того транспортного средства (37) колонны (36, 45) транспортных средств, чья скорость уменьшается во время шага замедления медленней всего, автоматически переключается в основной режим, и
причем во время шага замедления скорость по меньшей мере одного дальнейшего транспортного средства (3, 39) колонны (36, 45) транспортных средств адаптируется к скорости транспортного средства (37) с переключенным в основной режим устройством (9) управления и/или регулировки.
13. Способ по п. 12, отличающийся тем, что устройство (9) управления и/или регулировки самого переднего транспортного средства (39) колонны (36, 45) транспортных средств самое позднее после выполнения шага замедления также автоматически переключается в основной режим, и что во время шага ускорения скорость по меньшей мере одного транспортного средства (3, 37), движущегося за самым передним транспортным средством (39), адаптируется к скорости самого переднего транспортного средства (39).
14. Устройство для оказания поддержки водителю транспортного средства, в частности автомобиля промышленного назначения, и/или для осуществления способа по любому из пп. 1-13, причем транспортное средство (3) может приводиться в движение при помощи по меньшей мере одного приводного устройства (15), в частности двигателя внутреннего сгорания,
отличающееся тем, что
предусмотрено устройство (9) управления и/или регулировки, при помощи которого в основном режиме транспортное средство (3) может автоматически регулироваться и/или управляться таким образом,
что если транспортное средство (3) превышает или достигает определенную максимальную скорость (Vmax), то на шаге замедления транспортное средство (3) вплоть до падения скорости ниже определенной минимальной скорости (Vmin), которая меньше, чем максимальная скорость (Vmax), переводится в состояние с уменьшенной приводной мощностью,
что если скорость транспортного средства (3) падает ниже определенной минимальной скорости (Vmin), то на шаге ускорения транспортное средство (3) вплоть до превышения максимальной скорости (Vmax) ускоряется при помощи приводного устройства (15), причем приводное устройство (15) во время шага ускорения эксплуатируется по существу с максимальным коэффициентом полезного действия, и
что максимальная скорость (Vmax) и/или минимальная скорость (Vmin) может устанавливаться и/или регулироваться в зависимости от по меньшей мере одного параметра дороги и/или дорожного движения.
15. Транспортное средство, в частности автомобиль промышленного назначения, для осуществления способа по любому из пп. 1-13 и/или с устройством по п. 14.
| US 8521394 B2, 27.08.2013 | |||
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО С ГИБРИДНЫМ ПРИВОДОМ И СПОСОБ УПРАВЛЕНИЯ ИМ | 2006 |
|
RU2381930C2 |

