Область техники
[0001] Настоящее изобретение относится к способу управления транспортным средством и устройству управления транспортным средством.
Уровень техники
[0002] В Патентном документе 1 описано устройство помощи при въезде в движущийся поток, которое помогает главному транспортному средству, движущемуся по первой полосе движения, перестроиться во вторую полосу движения. Устройство помощи при въезде в движущийся поток включает в себя блок ускорения, который разгоняет главное транспортное средство до целевой скорости в первой полосе движения, блок смены полосы движения, который заставляет главное транспортное средство сменить полосу движения с первой полосы на вторую полосу движения, блок определения расстояния A, который получает расстояние A от главного транспортного средства до контрольной точки, блок измерения скорости главного транспортного средства, который получает скорость главного транспортного средства, блок вычисления расстояния B, который вычисляет расстояние B, которое должно быть пройдено, прежде чем главное транспортное средство остановится в предварительно установленном замедление, и блок остановки, который прекращает помощь при въезде в движущийся поток при условии, что значение, полученное в результате вычитания пройденного расстояния B из расстояния A, меньше предварительно установленного порогового значения.
Патентный документ
[0003] Патентный документ 1: JP 2017-124743 A.
Техническая проблема
[0004] Устройство помощи при въезде в движущийся поток, раскрытое в Патентном документе 1, определяет прекращение помощи при въезде в движущийся поток в зависимости от ситуации вокруг главного транспортного средства после начала этой помощи. Остановка помощи при въезде в движущийся поток в середине участка схождения может сократить оставшееся расстояние, на котором водитель может ускорить главное транспортное средство на участке схождения. Следовательно, может быть трудно выполнить регулировку скорости для смены полосы движения посредством операции ускорения.
Задача настоящего изобретения состоит в том, чтобы облегчить водителю выполнение регулировки скорости для смены полосы движения посредством операции ускорения, когда не выполняется управление помощью при въезде в движущийся поток, которое помогает главному транспортному средству перейти на другую полосу движения на участке схождения, где полоса движения, на которой движется главное транспортное средство, сходится с другой полосой движения.
Решение проблемы
[0005] Согласно одному аспекту настоящего изобретения создан способ управления транспортным средством, включающий: обнаружение на запланированном маршруте движения главного транспортного средства участка схождения, на котором полоса движения, по которой движется главное транспортное средство, сходится с другой полосой движения; определение, выполнять или нет управление помощью при въезде в движущийся поток, чтобы помогать главному транспортному средству переключаться с полосы на другую полосу движения на участке схождения; и, если определено, что управление помощью при въезде в движущийся поток не должно выполняться на участке схождения, управление скоростью главного транспортного средства, чтобы она была заданной скоростью или меньше, до того, как главное транспортное средство пройдет через начальную точку участка схождения.
Преимущественные эффекты изобретения
[0006] Согласно аспекту настоящего изобретения, можно облегчить водителю выполнение регулировки скорости для смены полосы движения посредством операции ускорения, когда не выполняется управление помощью при въезде в движущийся поток.
Цель и преимущества изобретения будут реализованы и достигнуты с помощью элементов и комбинаций, конкретно указанных в формуле изобретения. Следует понимать, что как предшествующее общее описание, так и последующее подробное описание являются иллюстративными и пояснительными и не ограничивают изобретение.
Краткое описание чертежей
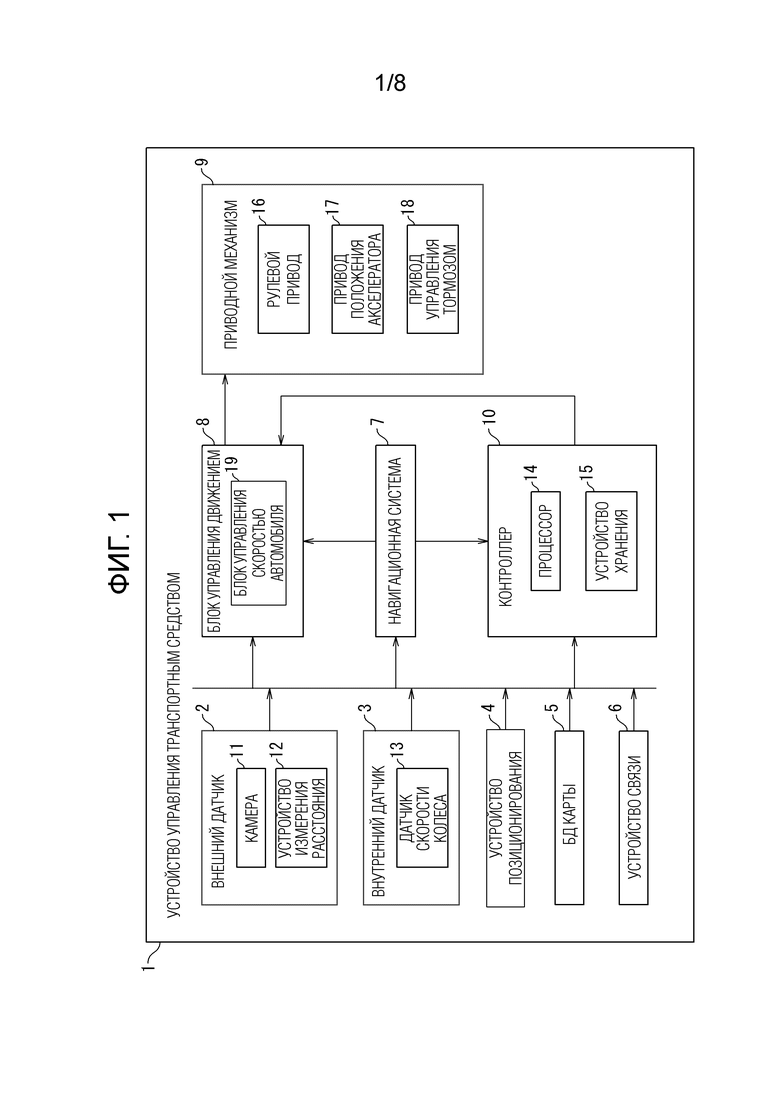
[0007] Фиг. 1 - схематическая структурная диаграмма примера устройства управления транспортным средством согласно варианту осуществления;
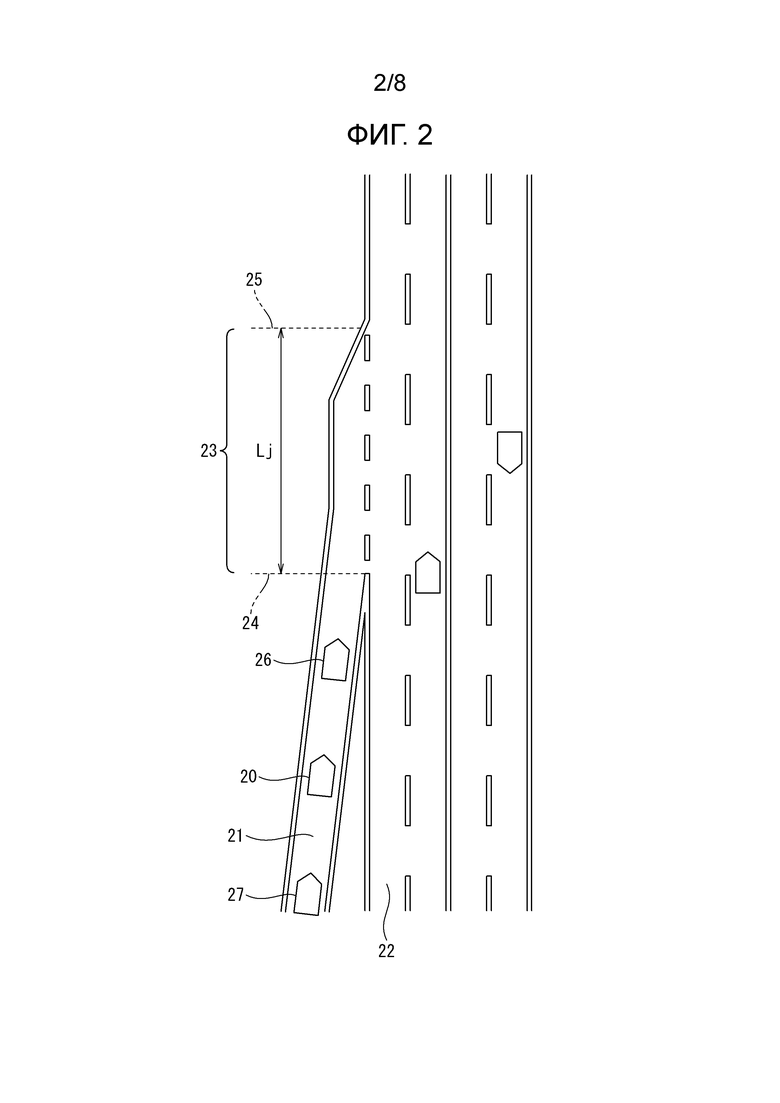
Фиг. 2 - схема, иллюстрирующая пример участка схождения;
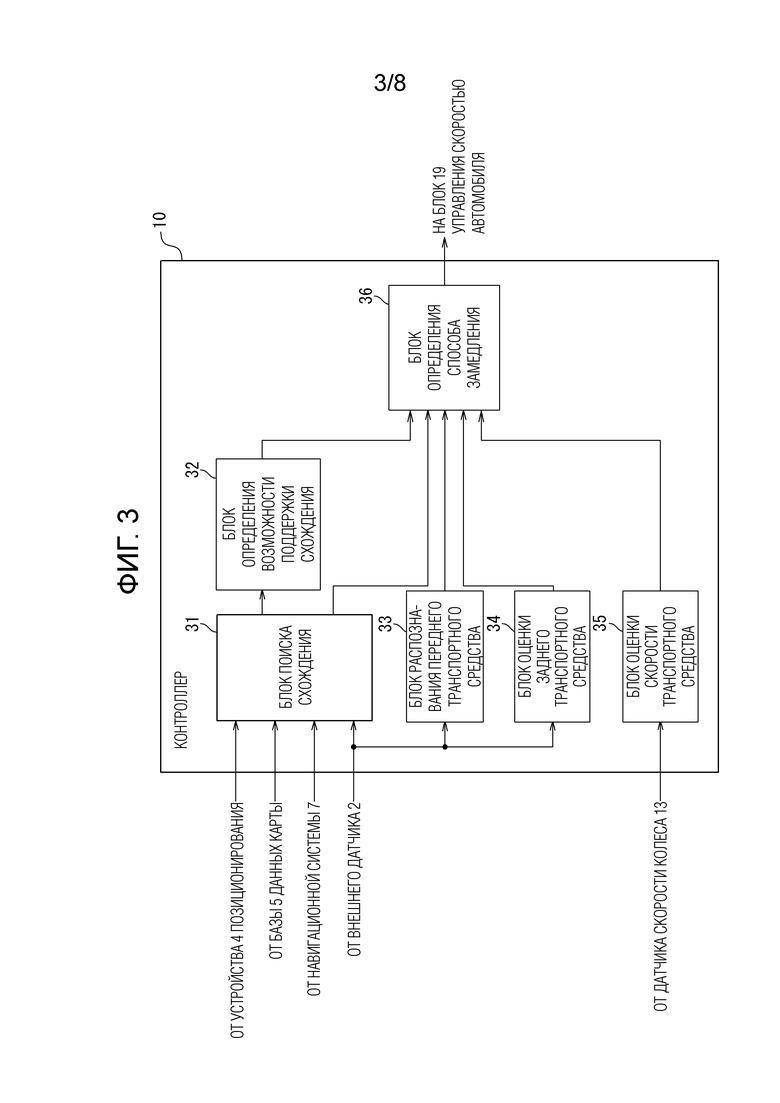
Фиг. 3 - блок-схема, иллюстрирующая пример функциональной структуры контроллера, показанного на фиг. 1;
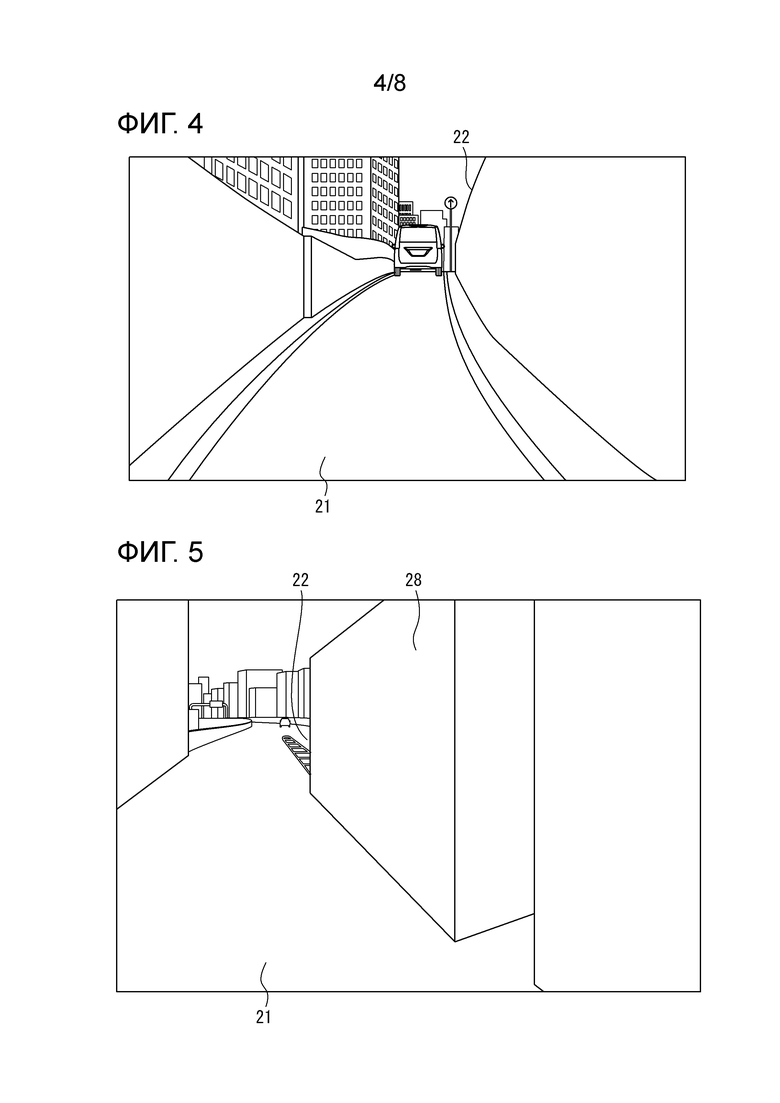
Фиг. 4 - иллюстративная диаграмма второго примера участка схождения, где управление помощью при въезде в движущийся поток не выполняется;
Фиг. 5 - иллюстративная диаграмма третьего примера участка схождения, в которой управление помощью при въезде в движущийся поток не выполняется;
Фиг. 6 - иллюстративная схема четвертого примера участка схождения, в которой управление помощью при въезде в движущийся поток не выполняется;
Фиг. 7 - иллюстративная диаграмма пятого примера участка схождения, где управление помощью при въезде в движущийся поток не выполняется;
Фиг. 8 - иллюстративная схема условия невыполнения управления помощью при въезде в движущийся поток; и
Фиг. 9 - блок-схема примера способа управления транспортным средством согласно варианту осуществления.
Описание вариантов осуществления изобретения
[0008] Далее со ссылкой на чертежи будут описаны варианты осуществления настоящего изобретения.
Конструкция
Ссылка будет сделана на фиг. 1. На основе условий движения вокруг транспортного средства (далее именуемого «главное транспортное средство»), установленного с устройством 1 управления транспортным средством, устройство 1 управления транспортным средством выполняет автоматическое управление движением для автоматического управления главным транспортным средством без участия водителя и вспомогательное управление для помощи водителю в управлении основным транспортным средством.
Управление помощью при вождении может включать в себя автоматическое рулевое управление, автоматическое торможение, управление движением с постоянной скоростью, управление удержанием полосы движения, управление помощью при въезде в движущийся поток и т.п.
[0009] Устройство 1 управления транспортным средством включает в себя внешний датчик 2, внутренний датчик 3, устройство позиционирования 4, базу 5 данных карты, устройство связи 6, навигационную систему 7, блок 8 управления движением, приводной механизм 9 и контроллер 10. Следует отметить, что на прилагаемых чертежах база данных карты обозначена как «БД карты».
Внешний датчик 2 представляет собой датчик, выполненный с возможностью обнаружения окружающей среды главного транспортного средства, например, объектов вокруг главного транспортного средства. Внешний датчик 2 может включать, например, камеру 11 и устройство 12 измерения расстояния.
[0010] Камера 11 и устройство 12 измерения расстояния обнаруживают окружающую среду основного транспортного средства, включая объекты, присутствующие вокруг основного транспортного средства (например, другие транспортные средства, пешеходы, белые линии, такие как линии границы полосы движения и разметка полосы движения, светофоры, стоп-линии, знаки, здания, столбы, бордюры и пешеходные переходы, предусмотренные на дорогах или вокруг дорог), относительное положение объектов относительно основного транспортного средства и относительные расстояния между основным транспортным средством и объектами.
Камера 11 может быть, например, стереокамерой. Камера 11 может быть монокулярной камерой, в которой один и тот же объект может быть сфотографирован с множества точек обзора с помощью монокулярной камеры, и может быть вычислено расстояние до объекта. Кроме того, расстояние до объекта может быть вычислено на основе положения контакта с землей объекта, обнаруженного из изображения, захваченного монокулярной камерой.
[0011] Устройство 12 измерения расстояния может быть, например, лазерным дальномером (LRF), радаром или лазерным сканером.
Камера 11 и устройство 12 измерения расстояния выводят информацию об окружающей среде, которая представляет собой информацию об обнаруженной окружающей среде, в навигационную систему 7, блок 8 управления движением и контроллер 10.
[0012] Внутренний датчик 3 представляет собой датчик, который определяет состояние движения основного транспортного средства. Внутренний датчик 3 может включать, например, датчик 13 скорости вращения колеса. Датчик 13 скорости вращения колес определяет скорость колеса главного транспортного средства.
Внутренний датчик 3 может включать в себя, например, датчик ускорения, который обнаруживает ускорение, генерируемое в главном транспортном средстве, и гироскопический датчик, который определяет угловую скорость главного транспортного средства.
Внутренний датчик 3 выводит информацию о состоянии движения, которая является информацией об обнаруженном состоянии движения, в навигационную систему 7, блок 8 управления движением и контроллер 10.
[0013] Устройство 4 позиционирования принимает радиоволны от множества навигационных спутников для определения текущего положения главного транспортного средства и выводит полученное текущее положение главного транспортного средства в навигационную систему 7, блок 8 управления движением и контроллер 10. Устройство 4 позиционирования может включать в себя, например, приемник глобальной системы позиционирования (GPS) или другую систему глобального позиционирования (глобальная навигационная спутниковая система: GNSS), кроме приемника GPS.
[0014] В базе 5 данных карты хранятся данные карты дорог.
Данные дорожной карты включают в себя формы (формы полос) и информацию о координатах белых линий, например, линии границ полос и разметку полос, высоту дорог и белые линии, а также информацию о координатах таких функций, как светофоры, стоп-линии, знаки, здания, столбы, бордюры и пешеходные переходы на дорогах или вокруг дорог.
Данные дорожной карты могут дополнительно включать в себя информацию о типах дорог, уклонах дороги, количестве полос движения, ограничениях скорости (разрешенных скоростях), ширине дороги, наличии или отсутствии точек схождения и т.п. Типы дорог могут включать, например, дороги общего пользования и шоссе.
К базе 5 данных карты обращаются навигационная система 7, блок 8 управления движением и контроллер 10.
[0015] Устройство 6 связи выполняет беспроводную связь с устройством связи за пределами транспортного средства. Система связи посредством устройства 6 связи может быть, например, беспроводной связью через наземную мобильную сеть общего пользования, связью между транспортными средствами, связью между дорогами или спутниковой связью.
Система 7 навигации, блок 8 управления движением и контроллер 10 могут получать данные карты дорог с помощью устройства 6 связи с внешнего устройства обработки информации вместо или в дополнение к базе 5 данных карты.
[0016] Навигационная система 7 обеспечивает руководство по маршруту к пункту назначения, установленному на карте водителем главного транспортного средства, пассажиром(ам) главного транспортного средства. Навигационная система 7 использует различные виды информации, поступающей от внешнего датчика 2, внутреннего датчика 3 и устройства 4 позиционирования для оценки текущего положения основного транспортного средства, генерирует маршрут к месту назначения и обеспечивает руководство по маршруту для пассажира(ов). Система 7 навигации выводит информацию о маршруте в блок 8 управления движением и контроллер 10.
[0017] Блок 8 управления движением выполняет управление движением главного транспортного средства, такое как управление движением с постоянной скоростью и управление помощью при въезде в движущийся поток, а также его автоматическое управление движением.
Например, при управлении движением с постоянной скоростью заданная скорость устанавливается на основе операции ввода, введенной водителем, и информации об ограничении скорости, выводимой навигационной системой 7. Блок 8 управления движением приводит в действие исполнительный механизм 9, чтобы регулировать скорость главного транспортного средства так, чтобы главное транспортное средство двигалось с установленной скоростью. Кроме того, блок 8 управления движением останавливает управление движением с постоянной скоростью, когда водитель выполняет операцию торможения (например, нажатие педали тормоза).
[0018] Например, управление помощью при въезде в движущийся поток может включать в себя автоматическое управление при въезде в движущийся поток, заставляющее главное транспортное средство автоматически менять полосу движения на участке схождения. При автоматическом управлении схождением блок 8 управления движением обнаруживает участок схождения на маршруте, по которому главное транспортное средство будет двигаться с этого момента, на основе текущего положения главного транспортного средства, данных дорожной карты в базе 5 данных карты и вывода маршрутной информации из навигационной системы 7.
Блок 8 управления движением устанавливает целевую траекторию движения для побуждения главного транспортного средства к смене полосы движения на участке схождения на основе окружающей среды, обнаруженной внешним датчиком 2, и состояния движения главного транспортного средства, обнаруженного внутренним датчиком 3. Блок 8 управления движением приводит в действие исполнительный механизм 9 для выполнения управления рулевым управлением и управления ускорением/замедлением главного транспортного средства, так что главное транспортное средство движется по целевой траектории движения.
[0019] Кроме того, управление помощью при въезде в движущийся поток может выполнять управление сигналами поворота в дополнение или вместо управления рулевым управлением и управления ускорением/замедлением, чтобы способствовать перестроению главного транспортного средства на участке схождения. Кроме того, управление помощью при въезде в движущийся поток может представлять водителю отображение скорости, рулевого управления и т.п. или указывать время, чтобы способствовать схождению основного транспортного средства.
[0020] Например, при автоматическом управлении схождением целевая траектория движения, по которой должно двигаться основное транспортное средство, устанавливается на основе текущего положения основного транспортного средства, данных дорожной карты, информации о маршруте, окружающей среды и состояние движения принимающего автомобиля. Блок 8 управления движением приводит в действие исполнительный механизм 9 для выполнения рулевого управления и управления ускорением/замедлением главного транспортного средства, так что главное транспортное средство движется по целевой траектории движения.
[0021] В ответ на управляющий сигнал, выводимый из блока 8 управления движением, исполнительный механизм 9 управляет рулевым колесом, открытием акселератора и тормозным устройством транспортного средства, чтобы формировать поведение транспортного средства транспортного средства.
Приводной механизм 9 включает в себя привод 16 рулевого управления, привод 17 положения акселератора и привод 18 управления тормозом.
Привод 16 рулевого управления регулирует направление поворота и величину поворота транспортного средства. Исполнительный механизм 17 положения акселератора управляет положением акселератора транспортного средства. Привод 18 управления тормозом управляет тормозным движением тормозного устройства транспортного средства.
[0022] Контроллер 10 представляет собой электронный блок управления (ЭБУ), который выполняет поддержку схождения для основного транспортного средства. Контроллер 10 включает в себя процессор 14 и периферийный компонент, такой как запоминающее устройство 15. Процессор 14 может быть, например, центральным процессором (ЦП/CPU) или микропроцессором (МКП/MPU).
Контроллер 10 может быть электронным блоком управления, интегрированным с блоком 8 управления движением, или может быть отдельным электронным блоком управления.
[0023] Запоминающее устройство 15 может включать в себя любое из полупроводникового запоминающего устройства, магнитного запоминающего устройства и оптического запоминающего устройства. Запоминающее устройство 15 может включать в себя запоминающие устройства, такие как регистр, кэш-память, постоянное запоминающее устройство (ПЗУ/ROM) и оперативное запоминающее устройство (ОЗУ/RAM), используемые в качестве первичного запоминающего устройства.
Следует отметить, что контроллер 10 может быть реализован с помощью функциональной логической схемы, установленной в полупроводниковой интегральной схеме общего назначения. Например, контроллер 10 может включать в себя программируемое логическое устройство (PLD), такое как программируемая вентильная матрица (FPGA) или т.п.
[0024] Контроллер 10 обнаруживает участок схождения на запланированном маршруте движения, по которому с этого момента будет двигаться основное транспортное средство.
Теперь ссылка будет сделана на фиг. 2. Контроллер 10 обнаруживает на запланированном маршруте движения участок 23 схождения, где полоса 21 движения, по которой движется основное транспортное средство 20, сходится с другой полосой 22 движения. Например, другая полоса движения 22 может быть основной полосой движения, а полоса движения 21 может быть полосой схождения, которая сходится с основной полосой движения. В дальнейшем полоса 21 движения, по которой движется главное транспортное средство 20, будет называться «полосой схождения», а другая полоса 22, с которой сходится полоса 21 движения, будет называться «полосой назначения схождения».
Участок 23 схождения представляет собой участок от начальной точки 24 до конечной точки 25, в котором полоса 21 схождения и полоса назначения 22 схождения разделены пунктирной разметкой полосы движения.
[0025] Контроллер 10 определяет, выполнять или нет управление помощью при въезде в движущийся поток, чтобы помочь главному транспортному средству 20 сменить полосу движения с полосы 21 схождения на полосу 22 назначения схождения в обнаруженной участка схождения. Например, контроллер 10 определяет, выполнять ли автоматическое управление схождением для побуждения главного транспортного средства 20 менять полосу движения с полосы 21 схождения на полосу 22 назначения схождения в обнаруженном участке схождения. Например, контроллер 10 может определять, выполнять ли автоматическое управление схождением или нет, на основе наличия или отсутствия данных дорожной карты для использования в автоматическом управлении схождением и формы дороги.
Когда управление помощью при въезде в движущийся поток не выполняется в обнаруженной участка схождения, контроллер 10 управляет скоростью главного транспортного средства 20 до заданной скорости v0 или меньше, прежде чем главное транспортное средство 20 пройдет через начальную точку 24 участка схождения.
[0026] В этом случае, например, контроллер 10 выводит заданную скорость v0 в блок 19 управления скоростью транспортного средства блока 8 управления движением, показанного на фиг. 1. Например, когда скорость движения главного транспортного средства 20 выше, чем заданная скорость v0, блок 19 управления скоростью транспортного средства может замедлить главное транспортное средство 20 до заданной скорости v0 до того, как главное транспортное средство 20 пройдет через начальную точку 24 раздел схождения. Например, когда главное транспортное средство 20 движется с заданной скоростью v0 или меньше, блок 19 управления скоростью транспортного средства может ограничивать ускорение, чтобы скорость главного транспортного средства 20 не превышала заданную скорость v0.
Таким образом, устанавливая скорость главного транспортного средства 20 на заданную скорость v0 или меньше до того, как главное транспортное средство 20 пройдет через начальную точку 24 участка 23 схождения, можно обеспечить длину участка, которая позволяет водителю ускорять главное транспортное средство на участке 23 схождения. Это помогает водителю регулировать скорость для смены полосы движения только путем ускорения.
[0027] Далее функциональная структура контроллера 10 будет описана со ссылкой на фиг. 3. Контроллер 10 включает в себя блок 31 поиска схождения, блок 32 определения возможности поддержки схождения, блок 33 распознавания переднего транспортного средства, блок 34 оценки заднего транспортного средства, блок 35 оценки скорости транспортного средства и блок 36 определения способа замедления.
Функции блока 31 поиска схождения, блока 32 определения возможности оказания помощи при въезде в движущийся поток, блока 33 распознавания переднего транспортного средства, блока 34 оценки заднего транспортного средства и блока 36 определения способа замедления могут быть реализованы, например, путем побуждения процессора 14 контроллера 10 для выполнения компьютерной программы, хранящейся в запоминающем устройстве 15.
[0028] Блок 31 поиска схождения оценивает текущее положение главного транспортного средства на основе результата измерения по текущему положению главного транспортного средства 20, измеренному устройством 4 позиционирования, окружающей среде, обнаруженной внешним датчиком 2, и данных дорожной карты базы 5 данных карты.
Блок 31 поиска схождения ищет на основе данных дорожной карты участок схождения, присутствующий на запланированной дороге, по которой главное транспортное средство будет двигаться в будущем из текущего местоположения главного транспортного средства, на основе информации о маршруте, выводимой из навигационной системы 7. Блок 31 поиска схождения получает информацию, такую как форма обнаруженного участка схождения, ограничение скорости полосы схождения и ограничение скорости полосы назначения схождения.
Блок 31 поиска схождения может использовать данные карты дорог, принятые от внешнего устройства обработки информации устройством 6 связи, в дополнение или вместо данных карты дорог в базе 5 данных карты.
[0029] Блок 31 поиска схождения выводит полученную информацию о участке схождения в блок 32 определения возможности выполнения помощи при въезде в движущийся поток и блок 36 определения способа замедления.
Блок 31 поиска схождения может выводить только информацию о участке схождения, ближайшем к главному транспортному средству, среди участков схождения на запланированной дороге движения или может выводить информацию о множестве участков схождения в порядке их близости к главному транспортному средству.
[0030] Блок 32 определения возможности выполнения помощи при въезде в движущийся поток определяет, выполнять ли управление помощью при въезде в движущийся поток посредством блока 8 управления перемещением на основе информации о участке схождения, выводимой блоком 31 поиска схождения.
Теперь ссылка будет сделана на фиг. 2. Например, блок 32 определения возможности помощи при въезде в движущийся поток может определить, что управление помощью при въезде в движущийся поток не может быть выполнено, когда длина Lj участка 23 схождения меньше заданной длины.
Дополнительно, например, блок 32 определения возможности выполнения помощи при въезде в движущийся поток может определять, что управление помощью при въезде в движущийся поток не выполняется, когда полоса 21 схождения имеет радиус кривизны меньше заданной длины или когда полоса 22 назначения схождения имеет радиус кривизны меньше заданного длина.
[0031] Теперь ссылка будет сделана на фиг. 4. Когда разница высот между полосой 21 схождения и полосой 22 назначения схождения составляет заданное значение или больше, а полоса 21 схождения ниже, чем полоса 22 назначения схождения, полоса 22 назначения схождения скрыта в слепой зоне, создаваемой конструкцией дороги.
Следовательно, блок 32 определения возможности помощи при въезде в движущийся поток может определить, что управление помощью при въезде в движущийся поток не выполняется, когда разность высот между полосой 21 схождения и полосой 22 назначения схождения является заданным значением или больше, а полоса 21 схождения ниже полосы 22 назначения схождения.
[0032] Теперь ссылка будет сделана на фиг. 5. Когда между полосой 21 схождения и полосой 22 назначения схождения имеется ограждение 28, имеющее заданную высоту или более, полоса 22 назначения схождения скрыта в слепой зоне, создаваемой ограждением 28.
Следовательно, блок 32 определения возможности выполнения помощи при въезде в движущийся поток может определять, что управление помощью при въезде в движущийся поток не выполняется, когда имеется ограждение 28, имеющее заданную высоту или более между полосой 21 схождения и полосой 22 назначения схождения.
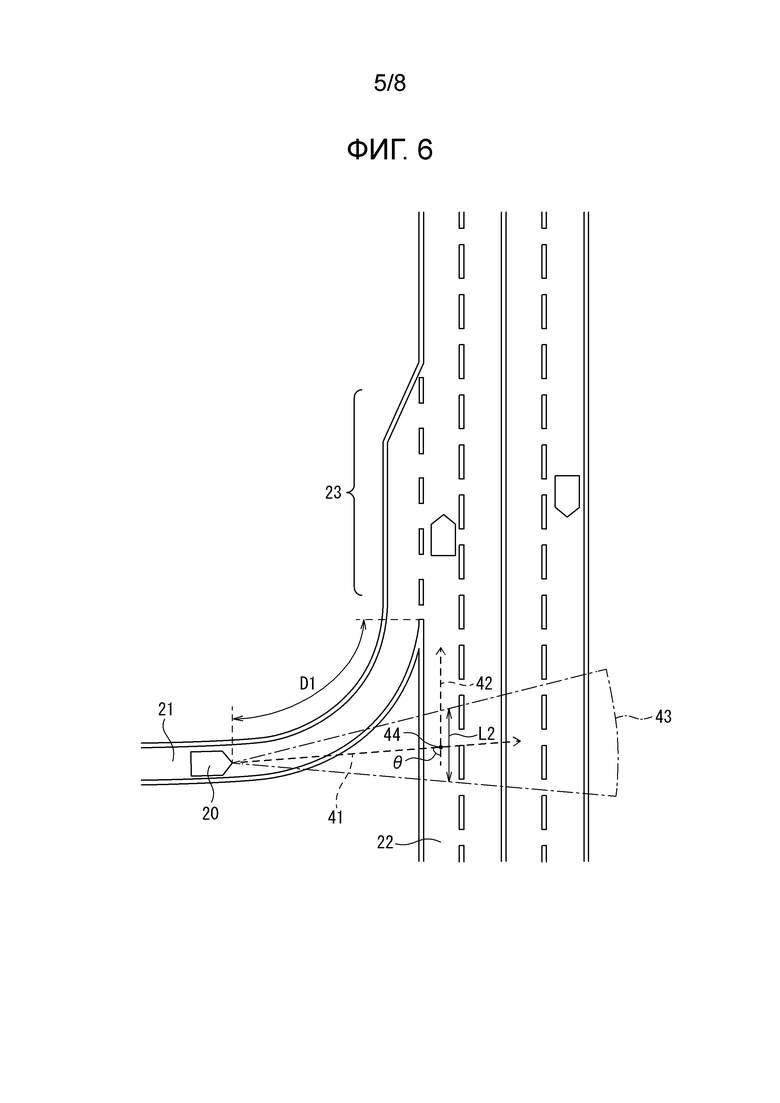
[0033] Кроме того, в зависимости от формы дороги объединяющейся полосы 21 и формы дороги целевой полосы 22 схождения невозможно определить транспортную ситуацию на полосе 22 назначения схождения перед участком 23 схождения, так что управление помощью при въезде в движущийся поток не может быть исполнено. Фиг. 6 и 7 иллюстрируют примеры, в которых дорожная ситуация на полосе 22 назначения схождения не может быть определена по полосе 21 схождения в зависимости от формы дороги.
[0034] Теперь ссылка будет сделана на фиг. 6. Когда разница θ между направлением 41 движения полосы 21 схождения в точке, расположенной на заданном расстоянии D1 перед участком 23 схождения, и направлением 42 движения полосы 22 назначения схождения является большой, длина L2 диапазона полосы 22 назначения схождения (т.е. диапазона, в котором внешний датчик 2 может обнаруживать дорожную ситуацию) в пределах диапазона 43 обнаружения внешнего датчика 2 перед основным транспортным средством 20 становится коротким, что может сделать невозможным определение дорожной ситуации на полосе 22 назначения схождения.
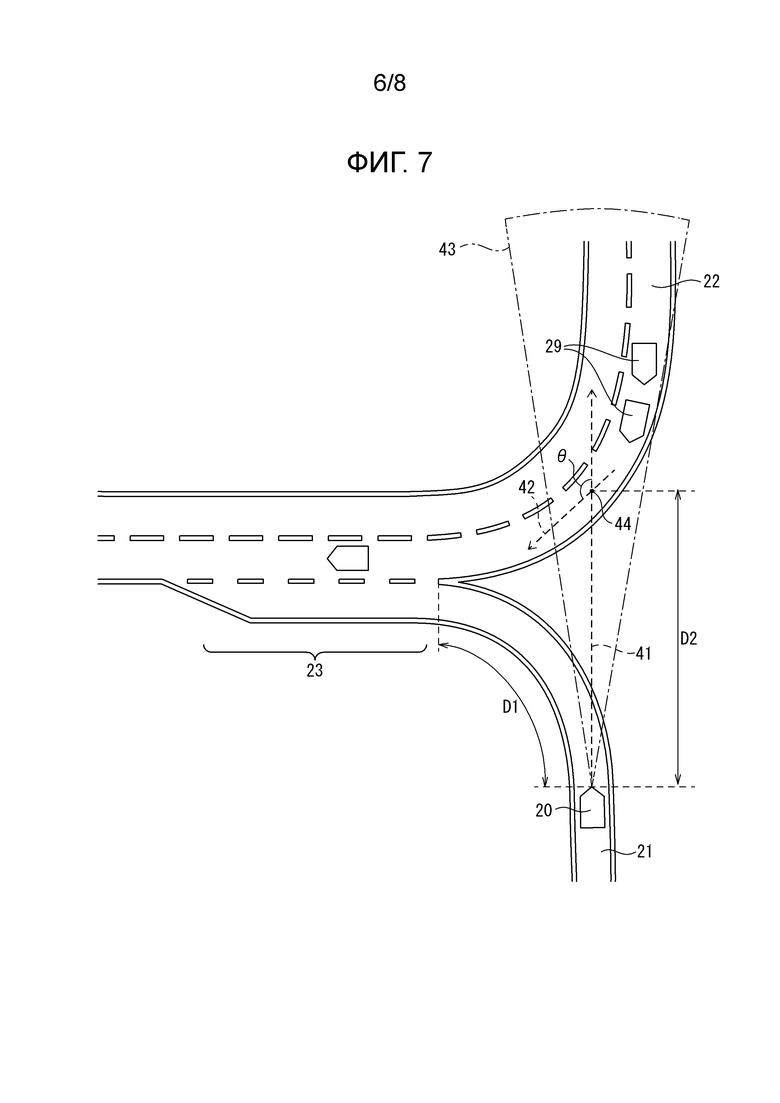
[0035] Теперь ссылка будет сделана на фиг. 7. Когда разница θ между направлением 41 движения полосы 21 схождения и направлением 42 движения полосы 22 назначения схождения становится еще больше и приближается к 180 градусам, другие транспортные средства 29, движущиеся по полосе 22 назначения схождения, перекрывают друг друга, если смотреть на точку, расположенную на заданном расстоянии D1 перед участком 23 схождения, что может сделать невозможным определение дорожной ситуации на полосе 22 назначения схождения.
Следовательно, блок 32 определения возможности выполнения помощи при въезде в движущийся поток может определять, что управление помощью при въезде в движущийся поток не выполняется, когда разница θ между направлением 41 движения полосы 21 схождения в точке, расположенной на заданном расстоянии D1 перед участком 23 схождения, и перемещением направление 42 полосы 22 назначения схождения является заданным пороговым значением или более.
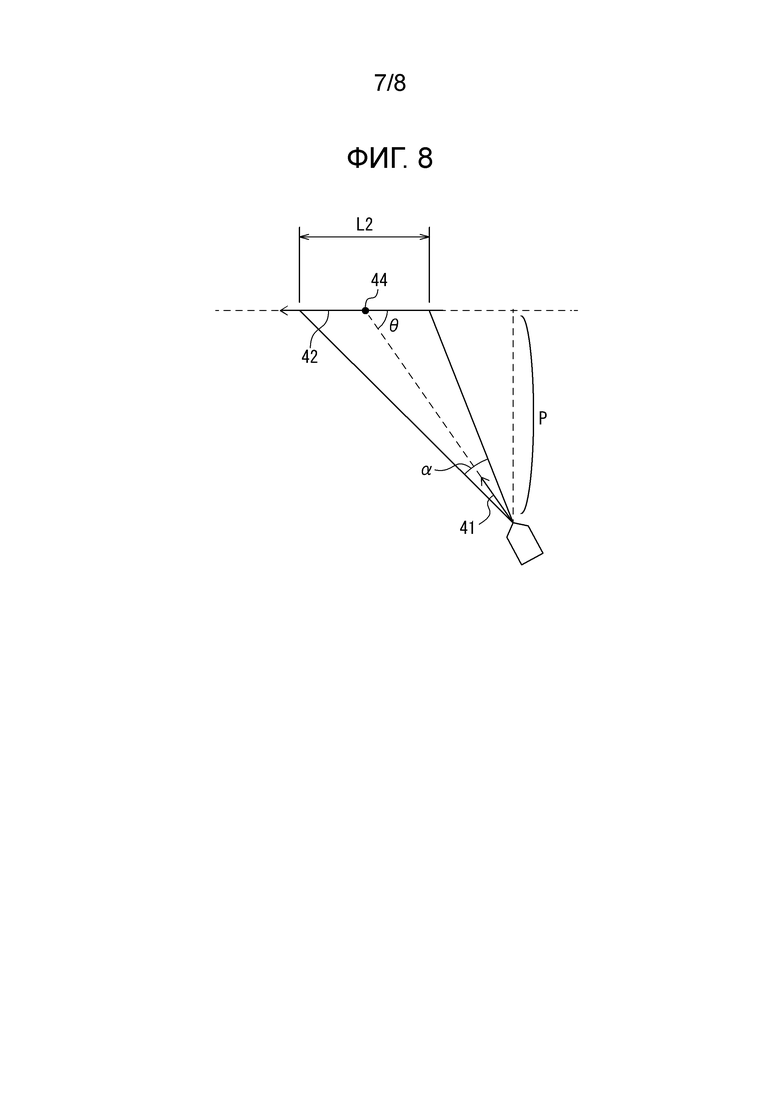
[0036] Пороговое значение разности θ может быть установлено на основе порогового значения L3 длины диапазона, в котором дорожная ситуация на полосе 22 назначения схождения должна быть обнаружена внешним датчиком 2.
Теперь ссылка будет сделана на фиг. 8. Например, предположим, что диапазон обнаружения внешнего датчика 2 представляет собой диапазон ширины азимутального угла α с центром в направлении 41 движения основного транспортного средства 20, а длина перпендикулярной линии от точки, расположенной на заданном расстоянии D1 перед участком 23 схождения, до продолженной линии 42 направления движения полосы 22 назначения схождения является Р.
Длина L2 диапазона обнаружения внешнего датчика 2 в полосе 22 назначения схождения может быть получена с помощью следующего уравнения (1):
L2=P(tan(90° — θ + α/2) — tan(90° — θ — α/2)) (1)
Пороговое значение разности θ может быть вычислено как верхнее предельное значение диапазона разности θ, где длина L2 больше, чем пороговое значение L3.
[0037] Теперь ссылка будет сделана на фиг. 7. Расстояние от точки, расположенной на заранее заданном расстоянии D1 перед участком 23 схождения, до полосы 22 назначения схождения обозначено D2.
Когда расстояние D2 слишком велико, разрешение обнаружения других транспортных средств 29 в полосе 22 назначения схождения в пределах диапазона 43 обнаружения внешнего датчика 2 уменьшается, что может сделать невозможным определение дорожной ситуации на полосе 22 назначения схождения.
Следовательно, блок 32 определения возможности выполнения помощи при въезде в движущийся поток может определить, что управление помощью при въезде в движущийся поток не выполняется, когда расстояние D2 от точки, расположенной на заданном расстоянии D1 перед участком 23 схождения до полосы 22 назначения схождения, является заданным значением или больше. Ссылочная позиция 44 указывает точку, где продолженная линия 41 направления движения полосы движения 21 в точке, расположенной на заданном расстоянии D1 перед участком 23 схождения, пересекает полосу 22 назначения схождения.
[0038] Кроме того, блок 32 определения возможности помощи при въезде в движущийся поток может определять, что управление помощью при въезде в движущийся поток не выполняется, также когда данные дорожной карты участка 23 схождения не могут быть получены или когда блок 8 управления перемещением не имеет функции помощи при въезде в движущийся поток.
Блок 32 определения возможности выполнения помощи при въезде в движущийся поток выводит результат определения в блок 36 определения способа замедления.
[0039] Блок 33 распознавания переднего транспортного средства получает положение переднего транспортного средства 26, движущегося впереди главного транспортного средства 20 по полосе 21 схождения, на основе информации об окружающей среде, выводимой внешним датчиком 2 (см. Фиг. 2). Кроме того, блок 33 распознавания переднего транспортного средства оценивает скорость переднего транспортного средства 26 на основе информации о местоположении переднего транспортного средства 26 и оценивает ускорение переднего транспортного средства 26 из информации о скорости переднего транспортного средства 26. Блок 33 распознавания переднего транспортного средства может напрямую оценивать скорость переднего транспортного средства 26 без оценки на основе информации о местоположении. Блок 33 распознавания переднего транспортного средства может получать информацию о местоположении, информацию о скорости и информацию об ускорении переднего транспортного средства 26 посредством устройства 6 связи.
Блок 33 распознавания переднего транспортного средства выводит информацию о положении, информацию о скорости и информацию об ускорении для переднего транспортного средства 26 в блок 36 определения способа замедления.
[0040] Блок 34 оценки заднего транспортного средства получает информацию о местоположении и информацию о скорости заднего транспортного средства 27, движущегося позади главного транспортного средства 20 по полосе 21 схождения на основе информации об окружающей среде, выводимой внешним датчиком 2 (см. Фиг.2). Следует отметить, что блок 34 оценки заднего транспортного средства может оценивать информацию о местоположении и информацию о скорости заднего транспортного средства 27 на основе положения и скорости главного транспортного средства 20 без зависимости от информации об окружающей среде, выводимой внешним датчиком 2. Блок 34 оценки заднего транспортного средства может получать информацию о местоположении и информацию о скорости заднего транспортного средства 27 посредством устройства 6 связи.
[0041] Блок 34 оценки заднего транспортного средства выводит информацию о положении и информацию о скорости заднего транспортного средства 27 в блок 36 определения способа замедления.
Блок 35 оценки скорости транспортного средства оценивает скорость главного транспортного средства на основе скорости колес главного транспортного средства 20, обнаруженной датчиком 13 скорости вращения колес. Блок 35 оценки скорости транспортного средства выводит информацию о скорости главного транспортного средства в блок 36 определения способа замедления.
[0042] Когда блок 32 определения возможности выполнения помощи при въезде в движущийся поток определяет, что управление помощью при въезде в движущийся поток не выполняется, блок 36 определения способа замедления определяет способ замедления для снижения скорости главного транспортного средства 20 до заданной скорости v0 или менее, прежде чем главное транспортное средство 20 проедет самое позднее через начальную точку 24 участка 23 схождения.
В частности, блок 36 определения способа замедления определяет заданную скорость v0, точку завершения замедления, замедление d0 и начальную точку замедления.
[0043] Например, блок 36 определения способа замедления может вычислить заданную скорость v0 на основе самой низкой скорости среди скорости переднего транспортного средства 26, ограничения скорости полосы 21 схождения и ограничения скорости полосы 22 назначения схождения.
Например, заданная скорость v0 может быть меньше на 10 км/ч или более, чем самая низкая скорость среди скорости переднего транспортного средства 26, ограничения скорости полосы 21 схождения и ограничения скорости полосы 22 назначения схождения.
Кроме того, например, заданная скорость v0 может быть на 20% или более медленнее, чем самая низкая скорость среди скорости переднего транспортного средства 26, ограничения скорости полосы 21 схождения и ограничения скорости полосы 22 назначения схождения.
[0044] Кроме того, заданная скорость v0 может быть средним значением между самой низкой скоростью среди скорости переднего транспортного средства 26, ограничением скорости полосы 21 схождения и ограничением скорости полосы 22 назначения схождения и допустимой низкой скоростью (10 км/ч).
Однако, когда заданная скорость v0, вычисленная, как указано выше, меньше разрешенной низкой скорости, блок 36 определения способа замедления может сбросить заданную скорость v0 на более низкое из допустимой низкой скорости или скорости переднего транспортного средства 26.
[0045] Затем блок 36 определения способа замедления вычисляет точку завершения замедления для завершения снижения скорости главного транспортного средства 20 до заданной скорости v0.
Например, блок 36 определения способа замедления может использовать начальную точку 24 участка 23 схождения в качестве точки завершения замедления. В этом случае главное транспортное средство замедляется до заданной скорости v0 при постоянном замедлении d0 от начальной точки замедления до начальной точки 24.
Например, блок 36 определения способа замедления может использовать в качестве точки завершения замедления точку, расположенную на заданном расстоянии перед начальной точкой 24 участка 23 схождения. В этом случае скорость главного транспортного средства может поддерживаться на заданной скорости v0 от точки завершения замедления до начальной точки 24.
[0046] Например, блок 36 определения способа замедления может определять точку завершения замедления, так что, когда главное транспортное средство ускоряется с заданной скоростью a ускорения от точки завершения замедления, скорость главного транспортного средства может достигать ограничения скорости v1 полосы 22 назначения схождения к тому моменту, когда главное транспортное средство проезжает начальную точку 24.
В частности, точка на заданном расстоянии D, определяемом следующим уравнением (2), перед начальной точкой 24 может быть определена как точка завершения замедления.
D = (v12 — v02)/2a (2)
[0047] Ускорение a может быть установлено в пределах диапазона ускорения, используемого при ускорении стандартного водителя, и может составлять, например, 0,8 м/с2. Дополнительно, может быть записан шаблон ускорения водителя главного транспортного средства, и значение, полученное в результате вычитания определенного процента от максимального ускорения в пределах записанного диапазона ускорений, может использоваться в качестве ускорения a.
[0048] Затем блок 36 определения способа замедления вычисляет замедление d0 для снижения скорости главного транспортного средства до заданной скорости v0.
Когда перед главным транспортным средством нет переднего транспортного средства 26, блок 36 определения способа замедления может определять замедление d0 так, чтобы замедление d0 было больше замедления, используемого, когда блок 8 управления движением замедляет главное транспортное средство при управления движением с постоянной скоростью.
[0049] Например, при управлении движением с постоянной скоростью блоком 8 управления движением, при замедлении главного транспортного средства до заданной скорости в отсутствие другого транспортного средства, которое становится препятствием перед главным транспортным средством, главное транспортное средство замедляется с постоянное замедление da. Например, когда заданная скорость изменяется на более низкую, управление движением с постоянной скоростью замедляет главное транспортное средство с постоянным замедлением da.
Например, блок 36 определения способа замедления может устанавливать замедление d0 на значение, большее, чем замедление da. Замедление при замедлении d0, превышающем замедление da, используемое в управлении движением с постоянной скоростью, может информировать водителя о том, что управление помощью при въезде в движущийся поток не выполняется.
[0050] При наличии заднего транспортного средства 27 блок 36 определения способа замедления может вычислять замедление d0 с учетом времени между транспортными средствами между задним транспортным средством 27 и главным транспортным средством, так что время между задним транспортным средством 27 и главным транспортным средством не является слишком коротким.
Например, блок 36 определения способа замедления может вычислить замедление db для обеспечения интервала между транспортными средствами в одну секунду или более по отношению к заднему транспортному средству 27 после одной секунды в соответствии со следующим уравнением (3):
[0051] db=2d — 4vr + 2vs (3)
В уравнении (3) d представляет собой расстояние между главным транспортным средством до замедления и задним транспортным средством 27, vr представляет скорость заднего транспортного средства 27, а vs представляет скорость главного транспортного средства до замедления.
Блок 36 определения способа замедления может определять замедление d0 таким образом, чтобы замедление d0 было равно или больше меньшего замедления либо замедления da, используемого при управлении движением с постоянной скоростью, либо замедления db в соответствии с временем между задним транспортным средством 27 и главным транспортным средством.
[0052] Однако, когда замедление dr, способное включать стоп-сигналы с помощью рекуперативного тормоза, установлено как нижний предел замедления, а замедление da и замедление db меньше, чем замедление dr, замедление d0 может быть установлено как замедление dr. Например, замедление dr может составлять 0,7 м/с2.
Кроме того, когда верхний предел du допустимого замедления задан, а замедление da и замедление db больше, чем верхний предел du, замедление d0 может быть установлено как верхний предел du. Например, верхний предел замедления du может составлять 1,3 м/с2.
Следует отметить, что взаимосвязь между верхним пределом du и нижним пределом dr замедления, упомянутыми выше, и задним транспортным средством 27 является лишь одним примером. Верхний предел замедления du может быть определен в диапазоне, который не вызывает у пассажира(ов) беспокойства из-за внезапного замедления, а нижний предел замедления dr может быть определен в диапазоне, который позволяет водителю воспринимать, что главное транспортное средство замедляется. Взаимосвязь с задним транспортным средством 27 может быть определена таким образом, что риск столкновения с задним транспортным средством 27 явно не увеличивается.
[0053] С другой стороны, когда переднее транспортное средство 26 находится впереди главного транспортного средства, блок 36 определения способа замедления может вычислять замедление d0 на основе замедления db в соответствии с временем между задним транспортным средством 27 и главным транспортным средством и замедления df переднего транспортного средства.
Например, блок 36 определения способа замедления может определять, какое из замедления db и замедления df больше. Когда замедление df равно замедлению db или более, замедление d0 может быть определено так, чтобы быть замедлением df или более. Когда замедление df меньше, чем замедление db, замедление d0 может быть определено таким образом, чтобы быть замедлением df или более и замедлением db или менее.
[0054] Затем, на основе вычисленной заданной скорости v0, точки завершения замедления и замедления d0, блок 36 определения способа замедления вычисляет начальную точку замедления, которая удовлетворяет упомянутым выше.
Блок 36 определения способа замедления выводит вычисленную начальную точку замедления, замедление d0 и заданную скорость v0 в блок 19 управления скоростью транспортного средства блока 8 управления движением.
Блок 19 управления скоростью транспортного средства замедляет главное транспортное средство до заданной скорости v0 посредством замедления с постоянным замедлением d0 от начальной точки замедления, выводимой из блока 36 определения способа замедления.
[0055] Например, когда начальная точка 24 участка 23 схождения является точкой завершения замедления, блок 19 управления скоростью транспортного средства может замедлить главное транспортное средство с постоянным замедлением d0 от начальной точки замедления до начальной точки 24 и установить скорость главное транспортное средство с заданной скоростью v0 в начальной точке 24.
Например, когда точка завершения замедления является точкой, расположенной на заданном расстоянии D до начальной точки 24 участка 23 схождения, блок 19 управления скоростью транспортного средства может замедлить главное транспортное средство с постоянным замедлением d0 от начальной точки замедления, установить скорость главного транспортного средства на заданную скорость v0 в точке завершения замедления, а затем поддерживать скорость главного транспортного средства на заданной скорости v0 от точки завершения замедления до начальной точки 24.
[0056] Блок 19 управления скоростью транспортного средства определяет, завершено ли замедление главного транспортного средства. После завершения замедления главного транспортного средства блок 19 управления скоростью транспортного средства определяет, завершена ли операция схождения вручную, выполняемая водителем на участке 23 схождения, или нет.
Когда скорость главного транспортного средства равна или меньше заданной скорости (например, ограничение скорости полосы 22 назначения схождения) управления движением с постоянной скоростью блоком 8 управления движением после завершения операции схождения вручную посредством водитель, блок 19 управления скоростью транспортного средства ускоряет главное транспортное средство до заданной скорости.
[0057] Следует отметить, что когда управление помощью при въезде в движущийся поток не выполняется в результате определения блока 32 определения возможности выполнения поддержки схождения, контроллер 10 может уведомить водителя о том, что управление помощью при въезде в движущийся поток не выполняется средствами (например, выводом или отображением сигнала звуковой сигнал), кроме замедления главного транспортного средства при замедлении d0.
Кроме того, когда водитель выполняет операцию ускорения (например, операцию ускорения), операция ускорения, выполняемая водителем, может иметь приоритет над замедлением главного транспортного средства.
Работа
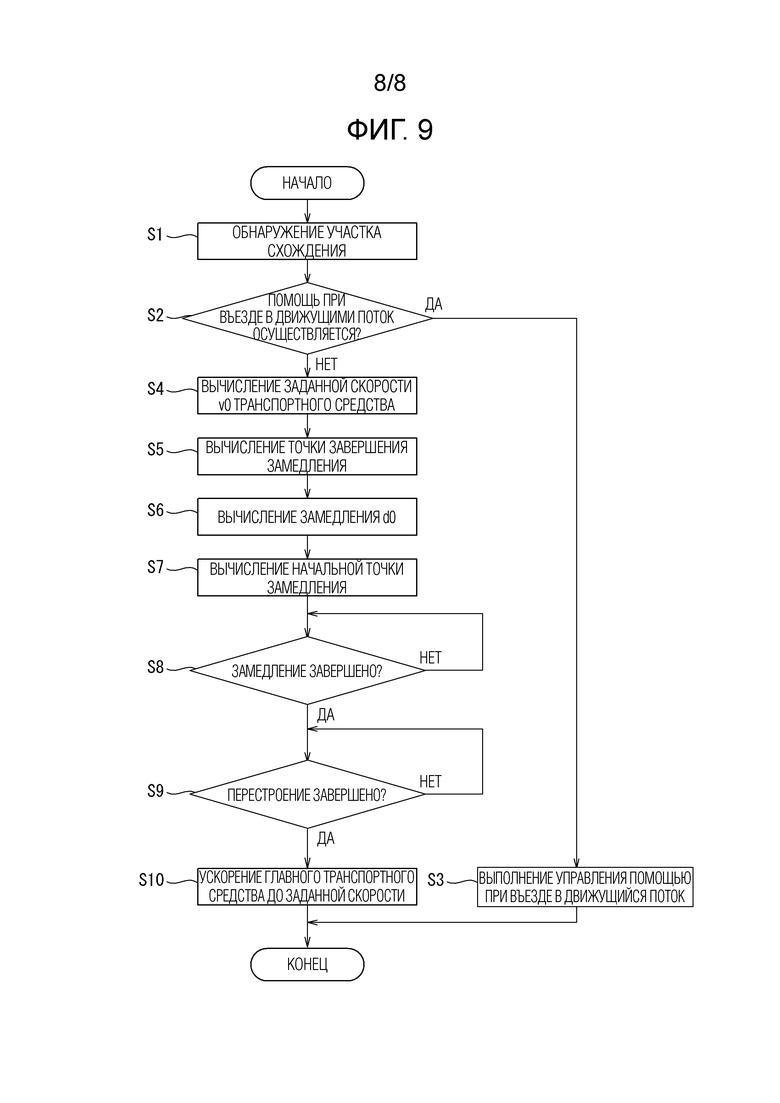
[0058] Далее будет описан пример способа управления транспортным средством согласно варианту осуществления со ссылкой на фиг. 9.
На этапе S1 блок 31 поиска схождения обнаруживает участок 23 схождения, присутствующий на запланированном маршруте движения, по которому главное транспортное средство будет двигаться в будущем из текущего положения главного транспортного средства.
На этапе S2 блок 32 определения возможности выполнения помощи при въезде в движущийся поток определяет, выполнять ли управление помощью при въезде в движущийся поток посредством блока 8 управления перемещением на участке 23 схождения, обнаруженном блоком 31 поиска схождения. При выполнении управления помощью при въезде в движущийся поток (этап S2: ДА), обработка переходит к этапу S3. Если не выполняется управление помощью при въезде в движущийся поток (этап S2: НЕТ), обработка переходит к этапу S4.
[0059] На этапе S3 блок 8 управления движением выполняет управление помощью при въезде в движущийся поток, чтобы помогать главному транспортному средству перестраиваться с полосы 21 схождения на полосу 22 назначения схождения на участке 23 схождения. Затем обработка заканчивается.
С другой стороны, на этапе S4 блок 36 определения способа замедления вычисляет заданную скорость v0.
На этапе S5 блок 36 определения способа замедления вычисляет точку завершения замедления.
[0060] На этапе S6 блок 36 определения способа замедления вычисляет замедление d0.
На этапе S7 блок 36 определения способа замедления вычисляет начальную точку замедления.
Блок 19 управления скоростью транспортного средства замедляет главное транспортное средство до заданной скорости v0 посредством замедления с постоянным замедлением d0 от начальной точки замедления, выводимой из блока 36 определения способа замедления.
На этапе S8 блок 19 управления скоростью транспортного средства определяет, завершено ли замедление основного транспортного средства или нет. Когда замедление главного транспортного средства завершено (этап S8: ДА), обработка переходит к этапу S9. Когда замедление главного транспортного средства еще не завершено (этап S8: НЕТ), обработка возвращается к этапу S8.
[0061] На этапе S9 блок 19 управления скоростью транспортного средства определяет, завершена ли ручная операция схождения, выполняемая водителем на участке 23 схождения, или нет. Когда операция схождения вручную завершена (этап S9: ДА), обработка переходит к этапу S10. Когда операция схождения вручную еще не завершена (этап S9: НЕТ), обработка возвращается к этапу S9.
На этапе S10 блок 19 управления скоростью транспортного средства ускоряет главное транспортное средство до заданной скорости. Затем обработка завершается.
Эффекты варианта осуществления
[0062] (1) Блок 31 поиска схождения обнаруживает на запланированном маршруте движения главного транспортного средства 20 участок 23 схождения, в котором полоса 21 схождения, по которой движется главное транспортное средство 20, сходится с полосой 22 назначения схождения. Блок 32 определения возможности выполнения помощи при въезде в движущийся поток определяет, следует ли выполнять управление помощью при въезде в движущийся поток, чтобы помочь главному транспортному средству 20 перестроиться на полосу 22 назначения схождения на участке 23 схождения. Когда определено, что управление помощью при въезде в движущийся поток не должно выполняться на участке 23 схождения, блок 36 определения способа замедления и блок 19 управления скоростью транспортного средства управляют скоростью главного транспортного средства 20, чтобы она была заданной скоростью v0 или меньше перед тем, как главное транспортное средство 20 проезжает через начальную точку 24 участка 23 схождения.
[0063] Таким образом, путем установки скорости главного транспортного средства 20 на заданную скорость v0 или меньше до того, как главное транспортное средство 20 пройдет через начальную точку 24 участка 23 схождения, можно обеспечить длину участка, которая позволяет водителю разогнать главное транспортное средство на участке 23 схождения. Это облегчает водителю регулировку скорости при смене полосы движения только путем ускорения.
Если регулировка скорости для смены полосы движения выполняется как операцией ускорения (например, операцией акселератора), так и операцией торможения (например, операцией торможения), операция изменения педали между педалью акселератора и педалью тормоза усложняется. Регулировка скорости только путем ускорения позволяет избежать сложной операции изменения педали.
[0064] В частности, при смене педалей с педали тормоза на педаль акселератора трудно предсказать ускорение в зависимости от количества нажатий на педаль акселератора. Кроме того, во время смены педалей с педали тормоза на педаль акселератора скорость вращения двигателя является низкой, так что ожидаемое ускорение может быть недостижимым.
Выполняя регулировку скорости только посредством операции ускорения, величина нажатия на педаль акселератора постоянно регулируется, что облегчает прогнозирование ускорения основного транспортного средства.
[0065] Кроме того, блок 8 управления движением прекращает управление движением с постоянной скоростью, когда водитель выполняет операцию торможения (например, нажатие педали тормоза). Соответственно, когда операция торможения выполняется для схождения, не только не выполняется управление помощи при въезде в движущийся поток, но также прекращается управление движением с постоянной скоростью.
Выполнение регулировки скорости только с помощью операции ускорения позволяет продолжать управление движением с постоянной скоростью даже без выполнения управления помощью при въезде в движущийся поток.
[0066] (2) Заданная скорость v0 может быть меньше на 10 км/ч или больше, чем самая низкая скорость из числа ограничения скорости полосы 21 схождения, по которой движется главное транспортное средство 20, ограничения скорости полосы 22 назначения схождения и скорости движения переднего транспортного средства 26, движущегося впереди главного транспортного средства 20.
Ограничение скорости главного транспортного средства 20 такой заданной скоростью v0 позволяет водителю немедленно уведомляться о том, что управление помощью при въезде в движущийся поток не выполняется.
[0067] (3) Когда определено, что управление помощью при въезде в движущийся поток не должно выполняться на участке 23 схождения, блок 36 определения способа замедления и блок 19 управления скоростью транспортного средства снижают скорость главного транспортного средства 20 до заданной скорости v0 перед тем, как главное транспортное средство 20 проезжает через начальную точку 24.
Замедление главного транспортного средства 20 до такой заданной скорости v0 позволяет водителю немедленно получать уведомление о том, что управление помощью при въезде в движущийся поток не выполняется.
[0068] (4) Блок 36 определения способа замедления может определять точку завершения замедления для завершения снижения скорости главного транспортного средства 20 до заданной скорости, так что, когда главное транспортное средство 20 ускоряется с заданным ускорением a от точки завершения замедления, скорость главного транспортного средства 20 может достигать ограничения скорости полосы 22 назначения схождения к тому времени, когда главное транспортное средство 20 проезжает через начальную точку 24.
В результате замедление завершается, так что главное транспортное средство 20 может разгоняться до скорости, необходимой для вхождения в начальную точку 24 участка 23 схождения с заданным ускорением a. Таким образом, водитель может выполнить операцию перестроения с помощью операции ускорения, которая не вызывает никакого дискомфорта.
[0069] (5) Блок 8 управления движением может иметь функцию автоматического движения с постоянной скоростью для приведения основного транспортного средства 20 к движению с заданной скоростью. Блок 36 определения способа замедления может устанавливать замедление d0 для снижения скорости главного транспортного средства 20 до заданной скорости v0, большей, чем замедление da для замедления с помощью функции автоматического перемещения с постоянной скоростью, когда заданная скорость понижается.
Замедление главного транспортного средства 20 при таком большом замедлении d0 позволяет водителю немедленно уведомляться о том, что управление помощью при въезде в движущийся поток не выполняется.
[0070] (6) Блок 8 управления движением может иметь функцию автоматического движения с постоянной скоростью, которая заставляет базовое транспортное средство 20 двигаться с заданной скоростью. Блок 19 управления скоростью транспортного средства ускоряет главное транспортное средство 20 до заданной скорости, когда скорость главного транспортного средства 20 равна или меньше установленной скорости после завершения операции схождения вручную водителем на участке 23 схождения.
В результате движение с установленной скоростью путем автоматического движения с постоянной скоростью может быть возобновлено после того, как водитель завершит ручную операцию перестроения.
[0071] Все примеры и условные формулировки, представленные в данном документе, предназначены для информативных целей, чтобы помочь читателю понять изобретение и концепции, внесенные изобретателем в развитие данной области техники, и они не должны рассматриваться как ограничения такими конкретно перечисленными примерами и условиями, а упоминание таких примеров в описании не связана с демонстрацией превосходства или неполноценности данного изобретения. Хотя один или более вариантов осуществления настоящего изобретения были описаны подробно, следует понимать, что в изобретение могут быть внесены различные изменения, замены и модификации, не выходящие за рамки сущности и объема данного изобретения.
Перечень ссылочных позиций
[0072] 1 - устройство управления транспортным средством
2 - внешний датчик
3 - внутренний датчик
4 - устройство позиционирования
5 - база данных карты
6 - устройство связи
7 - навигационная система
8 - блок управления движением
9 – приводной механизм
10 - контроллер
11 - камера
12 - устройство измерения расстояния
13 - датчик скорости колеса
14 - процессор
15 - устройство хранения
16 - рулевой привод
17 - привод положения акселератора
18 - привод управления тормозом
19 - блок управления скоростью автомобиля
20 – главное транспортное средство
21 - полоса схождения
22 - полосы назначения схождения
23 - участок схождения
24 - начальная точка
25 - конечная точка
26 - переднее транспортное средство
27 - заднее транспортное средство
31 - блок поиска схождения
32 - блок определения возможности поддержки схождения
33 - блок распознавания переднего транспортного средства
34 - блок оценки заднего транспортного средства
35 - блок оценки скорости транспортного средства
36 - блок определения способа замедления
Изобретение относится к транспортным средствам. В способе управления транспортным средством обнаруживают на запланированном маршруте движения главного транспортного средства участок схождения, на котором полоса движения, по которой движется главное транспортное средство, сходится с другой полосой. Определяют перед началом управления помощью при въезде в движущийся поток, следует ли управлять помощью при въезде в движущийся поток. Определяют, превышает ли скорость главного транспортного средства заданную скорость, если определено, что не следует управлять помощью при въезде в движущийся поток на участке схождения. Управляют скоростью главного транспортного средства так, чтобы оно проезжало начальную точку участка схождения после замедления основного транспортного средства до заданной скорости, если определено, что не следует управлять помощью при въезде в движущийся поток на участке схождения, и скорость главного транспортного средства определена как превышающая заданную скорость. Решение направлено на помощь водителю. 2 н. и 4 з.п. ф-лы, 9 ил.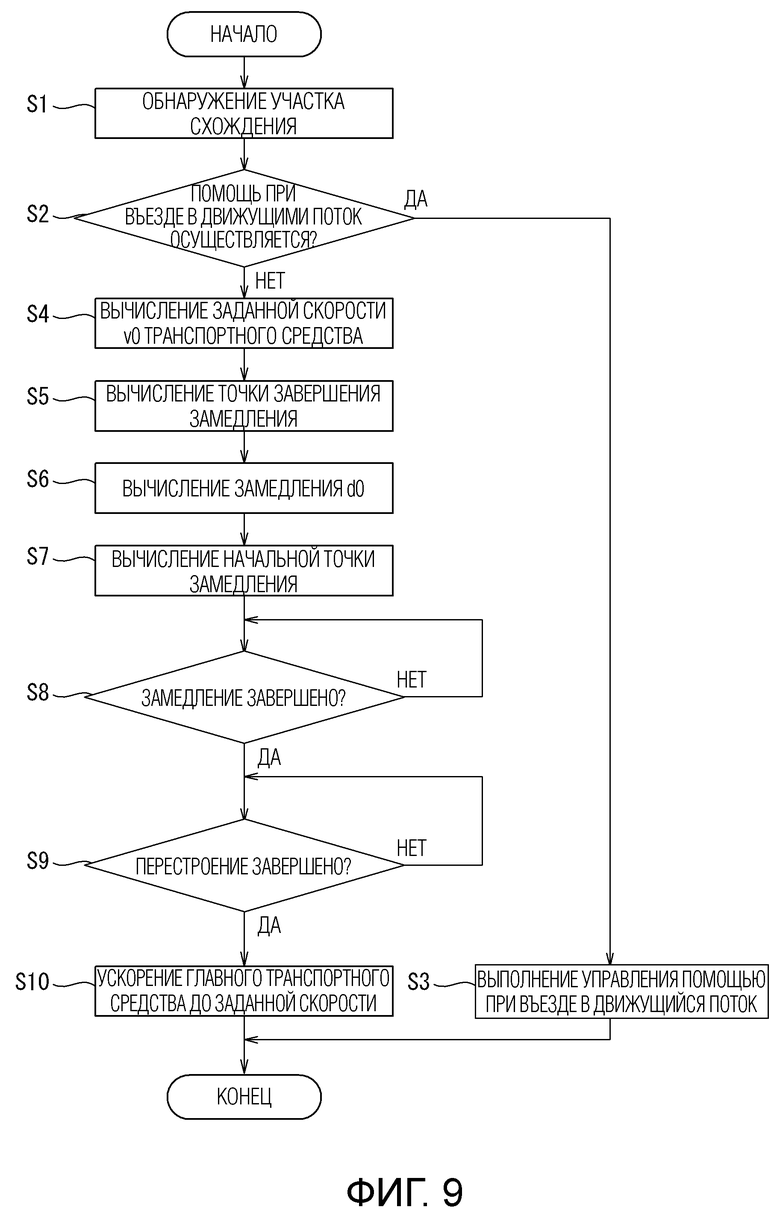
1. Способ управления транспортным средством, включающий:
обнаружение на запланированном маршруте движения главного транспортного средства участка схождения, на котором полоса движения, по которой движется главное транспортное средство, сходится с другой полосой;
определение перед началом управления помощью при въезде в движущийся поток для оказания помощи главному транспортному средству в изменении полос движения на другую полосу движения на участке схождения, следует или нет выполнять управление помощью при въезде в движущийся поток; и
определение того, превышает ли скорость главного транспортного средства заданную скорость, если определено, что не следует выполнять управление помощью при въезде в движущийся поток на участке схождения; и,
управление скоростью главного транспортного средства так, чтобы главное транспортное средство проезжало начальную точку участка схождения после замедления основного транспортного средства до заданной скорости, если определено, что не следует выполнять управление помощью при въезде в движущийся поток на участке схождения, и скорость главного транспортного средства определена как превышающая заданную скорость.
2. Способ управления транспортным средством по п. 1, при котором заданная скорость ниже на 10 км/ч или более наименьшей скорости среди ограничения скорости полосы движения, по которой движется главное транспортное средство, ограничения скорости другой полосы и скорости движения переднего транспортного средства, движущегося впереди главного транспортного средства.
3. Способ управления транспортным средством по п. 1, включающий определение точки завершения замедления для завершения снижения скорости главного транспортного средства до заданной скорости так, что, когда главное транспортное средство ускоряется с заданным ускорением от точки завершения замедления, скорость главного транспортного средства может достичь ограничения скорости другой полосы к тому моменту, когда главное транспортное средство пройдет через начальную точку.
4. Способ управления транспортным средством по п. 3, при котором главное транспортное средство имеет функцию автоматического движения с постоянной скоростью для приведения главного транспортного средства в движение с заданной скоростью, при которой замедление для снижения скорости главного транспортного средства до заданной скорости устанавливается большим, чем замедление для замедления с помощью функции автоматического движения с постоянной скоростью при понижении заданной скорости.
5. Способ управления транспортным средством по п. 3, при котором главное транспортное средство имеет функцию автоматического движения с постоянной скоростью для приведения главного транспортного средства в движение с заданной скоростью, при которой, когда скорость главного транспортного средства равна или ниже заданной скорости после завершения водителем операции схождения вручную на участке схождения, главное транспортное средство ускоряется до указанной заданной скорости.
6. Устройство управления транспортным средством, содержащее:
исполнительный механизм, выполненный с возможностью управления скоростью главного транспортного средства; и
контроллер, выполненный с возможностью:
- обнаружения участка схождения, на котором полоса движения главного транспортного средства сходится с другой полосой на запланированном маршруте движения главного транспортного средства;
- определения перед началом управления помощью при въезде в движущийся поток для оказания помощи главному транспортному средству в изменении полос движения на другую полосу движения на участке схождения, следует или нет выполнять управление помощью при въезде в движущийся поток;
- определения того, превышает ли скорость главного транспортного средства заданную скорость, если определено, что управление помощью при въезде в движущийся поток не следует выполнять на участке схождения; и,
- управления исполнительным механизмом таким образом, чтобы главное транспортное средство проезжало начальную точку участка схождения после замедления основного транспортного средства до заданной скорости, если определено, что не следует выполнять управление помощью при въезде в движущийся поток на участке схождения, и скорость главного транспортного средства определена как превышающая заданную скорость.
| JP 2017124743 A, 20.07.2017 | |||
| JP 2017019397 A, 26.01.2017 | |||
| US 20180211533 A1, 26.07.2018 | |||
| JP 2018086966 A, 07.06.2018. |

