1. Область техники, к которой относится изобретение
[0001] Изобретение относится к способу взаимодействия между агентами и энергонезависимому носителю информации.
2. Описание предшествующего уровня техники
[0002] В публикации нерассмотренной патентной заявки Японии 2003-016584 (JP 2003-016584 А) раскрыто устройство информационного терминала, которое включает в себя средство сбора информации главного транспортного средства для получения информации о главном транспортном средстве, включая информацию о местоположении и информацию о скорости, средство передачи для передачи информации о главном транспортном средстве на другое транспортное средство, когда выполнено заранее заданное условие передачи, и средство голосового управления для выполнения голосовых указаний на другом транспортном средстве на основе информации о местоположении и информации о скорости другого транспортного средства, которые получены от другого транспортного средства. Средство голосового управления в устройстве информационного терминала направляет информацию другого транспортного средства к водителю, когда расстояние между транспортными средствами между главным транспортным средством и другим транспортным средством превышает заранее заданное расстояние.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0003] Согласно способу, описанному в JP 2003-016584 А, путем получения информации о местоположении другого транспортного средства можно сообщать водителю информацию, обозначающую положение другого транспортного средства, чтобы не удаляться от другого транспортного средства. Однако, например, при обгоне другого транспортного средства или при попадании на полосу движения, где движется другое транспортное средство, содействие вождению главного транспортного средства путем взаимодействия с другим транспортным средством не осуществляется.
[0004] Изобретение заключается в том, чтобы обеспечить способ взаимодействия между агентами, которые предоставляют содействие вождению, путем уведомления водителей об информации, полученной в результате взаимодействия между агентами и энергонезависимым носителем информации.
[0005] Первый объект изобретения относится к способу взаимодействия между агентами. Способ взаимодействия включает в себя разрешение первому агенту, установленному на первом транспортном средстве, и второму агенту, установленному на втором транспортном средстве, взаимодействовать друг с другом, определение первым агентом первой информации о будущем вождении первого водителя на борту первого транспортного средства, получение первой информации вторым агентом и уведомление второго водителя на борту второго транспортного средства о первой информации содействия вождению, извлеченной на основе первой информации.
[0006] Согласно первому объекту изобретения, второй водитель второго транспортного средства может производить управление с использованием знания об информации содействия вождению, извлеченной на основе первой информации о будущем вождении первого водителя.
[0007] Согласно способу взаимодействия в соответствии с первым объектом изобретения, определение первым агентом первой информации может включать в себя оценку первым агентом плана движения первого транспортного средства по высказываниям первого водителя, получение вторым агентом первой информации может включать в себя получение вторым агентом информации, касающейся плана движения первого транспортного средства, оцененного первым агентом, в качестве информации о будущем вождении, и уведомление второго водителя о первой информации содействия вождению может включать в себя уведомление второго водителя о первой информации содействия вождению, извлеченной на основе информации, касающейся плана движения первого транспортного средства.
[0008] Способ взаимодействия в соответствии с первым объектом изобретения может дополнительно включать в себя определение вторым агентом второй информации о будущем вождении второго водителя, получение второй информации первым агентом и уведомление первого водителя о второй информации содействия вождению, извлеченной на основе второй информации.
[0009] Согласно способу взаимодействия в соответствии с объектом изобретения, определение вторым агентом информации о будущем вождении второго водителя может включать в себя определение вторым агентом ответной информации, полученной на основе ответа второго водителя на первую информацию содействия вождению, в качестве информации о будущем вождении второго водителя, и уведомление первого водителя о второй информации содействия вождению может включать в себя уведомление первого водителя о второй информации содействия вождению, извлеченной на основе ответной информации.
[0010] Второй объект изобретения также относится к способу взаимодействия между агентами. Способ взаимодействия включает в себя разрешение первому агенту, установленному на первом транспортном средстве, и второму агенту, установленному на втором транспортном средстве, взаимодействовать друг с другом, определение первым агентом информации о будущем вождении первого водителя на борту первого транспортного средства и передачу информации первым агентом для того, чтобы второй агент мог получить информацию.
[0011] Третий объект изобретения также относится к способу взаимодействия между агентами. Способ взаимодействия включает в себя получение ответной информации, полученной на основе ответа второго водителя на информацию содействия вождению, извлеченную на основе информации, касающейся плана движения первого транспортного средства, в качестве информации о будущем вождении второго водителя, и уведомление первого водителя об информации содействия вождению, извлеченной на основе ответной информации.
[0012] Способ взаимодействия согласно третьему объекту изобретения может дополнительно включать в себя разрешение первому агенту, установленному на первом транспортном средстве, и второму агенту, установленному на втором транспортном средстве, взаимодействовать друг с другом, получение вторым агентом первой информации о будущем вождении первого водителя на борту первого транспортного средства и уведомление второго водителя на борту второго транспортного средства об информации содействия вождению, извлеченной на основе первой информации.
[0013] Согласно способу взаимодействия в соответствии с третьим объектом изобретения, первая информация может включать в себя план движения первого транспортного средства, и способ взаимодействия может дополнительно включать в себя определение ответной информации, полученной на основе ответа второго водителя на информацию содействия вождению, извлеченную на основе информации, касающейся плана движения первого транспортного средства, в качестве второй информации о будущем вождении второго водителя, и передачу ответной информации первым агентом, чтобы первый агент мог получить ответную информацию.
[0014] Четвертый объект изобретения относится к энергонезависимому носителю информации, хранящему информацию о будущем вождении первого водителя на борту первого транспортного средства. Информация о будущем вождении первого водителя определена первым агентом, установленным на первом транспортном средстве, принимается вторым агентом, установленным на втором транспортном средстве, и использована для получения информации содействия вождению для уведомления второго водителя на борту второго транспортного средства.
[0015] Пятый объект изобретения также относится к энергонезависимому носителю информации, хранящему ответную информацию, полученную на основе ответа второго водителя на борту второго транспортного средства на информацию содействия вождению, извлеченную на основе информации, касающейся плана движения первого транспортного средства. Ответная информация определена вторым агентом, установленным на втором транспортном средстве, принимается первым агентом, установленным на первом транспортном средстве, и использована для извлечения информации содействия вождению для уведомления второго водителя.
[0016] Наличие данных объектов изобретения помогает создать способ взаимодействия между агентами, которые предоставляют содействие вождению, путем уведомления водителей об информации, полученной в результате взаимодействия между агентами и энергонезависимым носителем информации.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0017] Признаки, преимущества, а также техническая и промышленная значимость примеров осуществления изобретения будут описаны ниже со ссылкой на сопровождающие чертежи, на которых одинаковые ссылочные позиции обозначают одинаковые элементы, и где:
Фиг. 1 представляет собой вид, иллюстрирующий систему взаимодействия агентов;
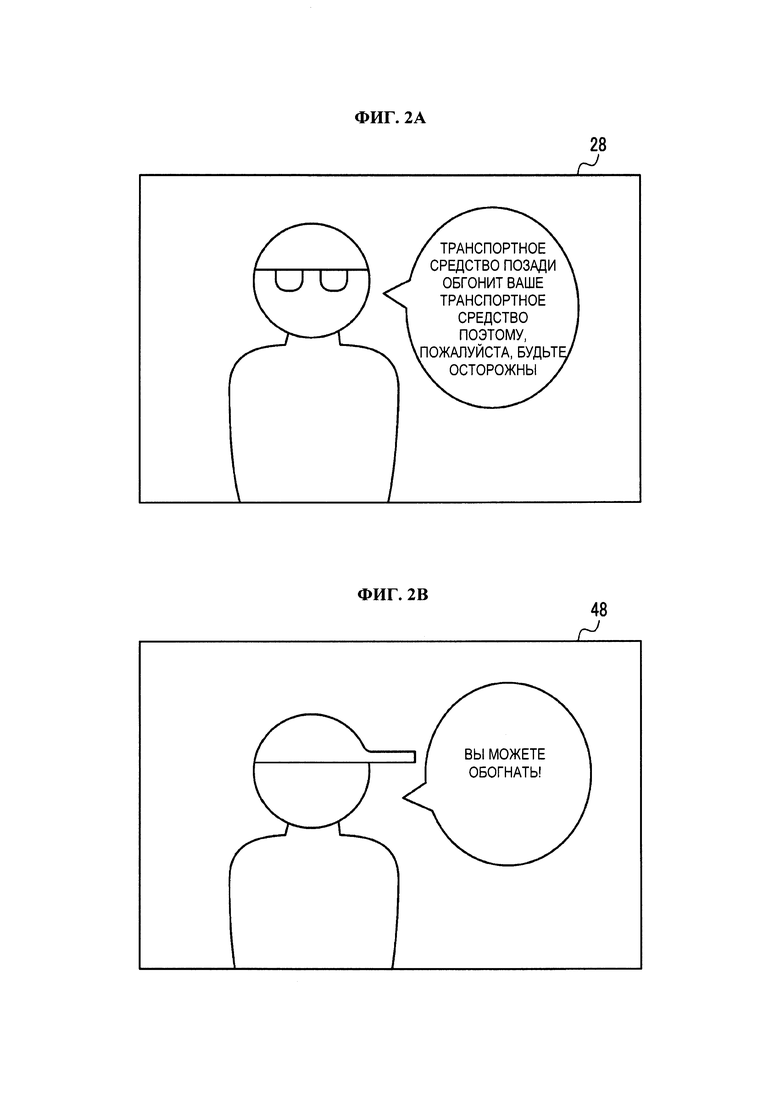
Фиг. 2А представляет собой вид, иллюстрирующий пример информации, которая передается водителю агентом при обгоне;
Фиг. 2В представляет собой вид, иллюстрирующий пример информации, которая передается другому водителю другим агентом при обгоне;
Фиг. 3 представляет собой схему, иллюстрирующую функциональную конфигурацию системы взаимодействия агентов;
Фиг. 4 представляет собой схему, иллюстрирующую функциональную конфигурацию первого агента;
Фиг. 5 представляет собой таблицу, показывающую информацию о параметрах управления водителя;
Фиг.6 представляет собой вид, иллюстрирующий пример содействия вождению на основе информации, касающейся параметра управления водителя, полученного путем взаимодействия между агентами;
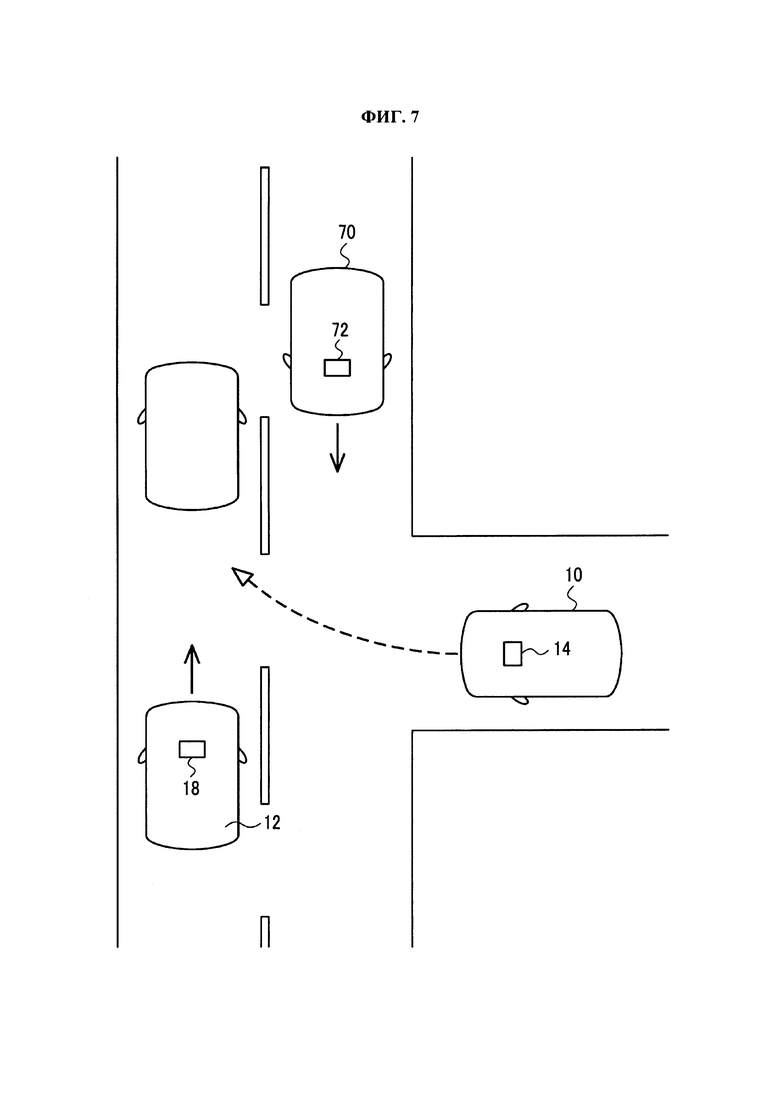
Фиг. 7 представляет собой вид, иллюстрирующий пример содействия вождению на основе информации о будущем вождении водителя, полученной путем взаимодействия между агентами; и
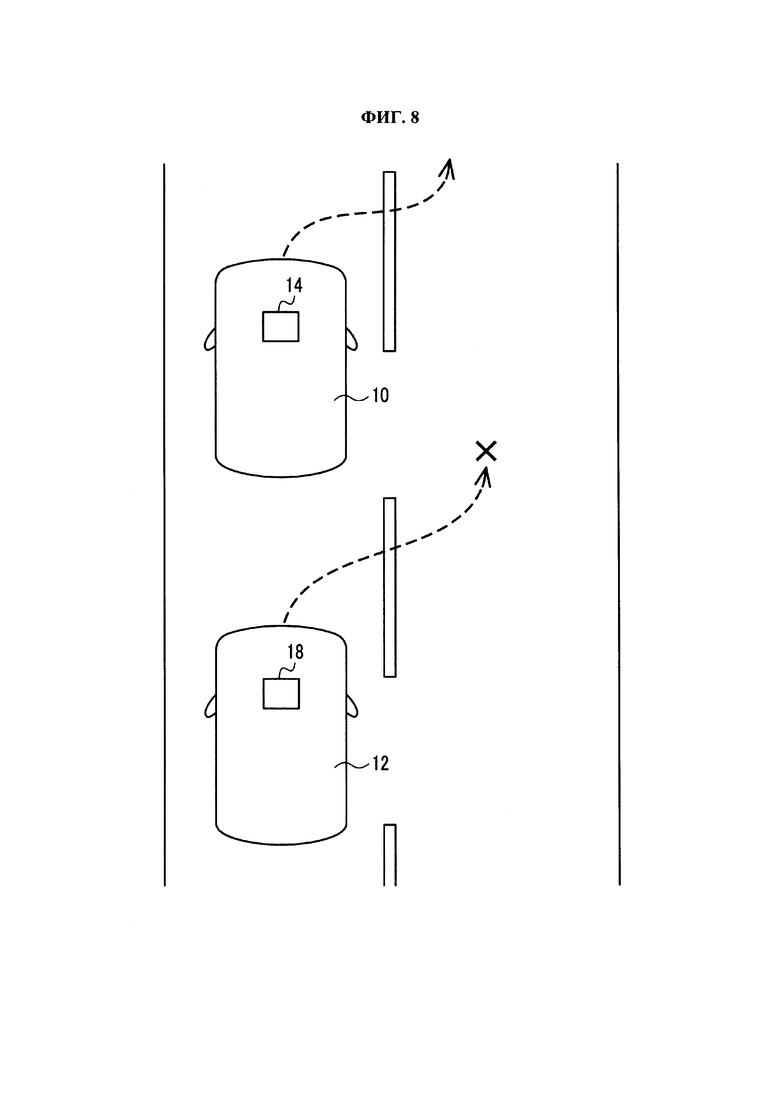
Фиг. 8 представляет собой вид, иллюстрирующий пример содействия вождению на основе информации, касающейся параметра управления водителя, и информации о будущем вождении водителя, которые получены путем взаимодействия между агентами.
ПОДРОБНОЕ ОПИСАНИЕ ПРИМЕРОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
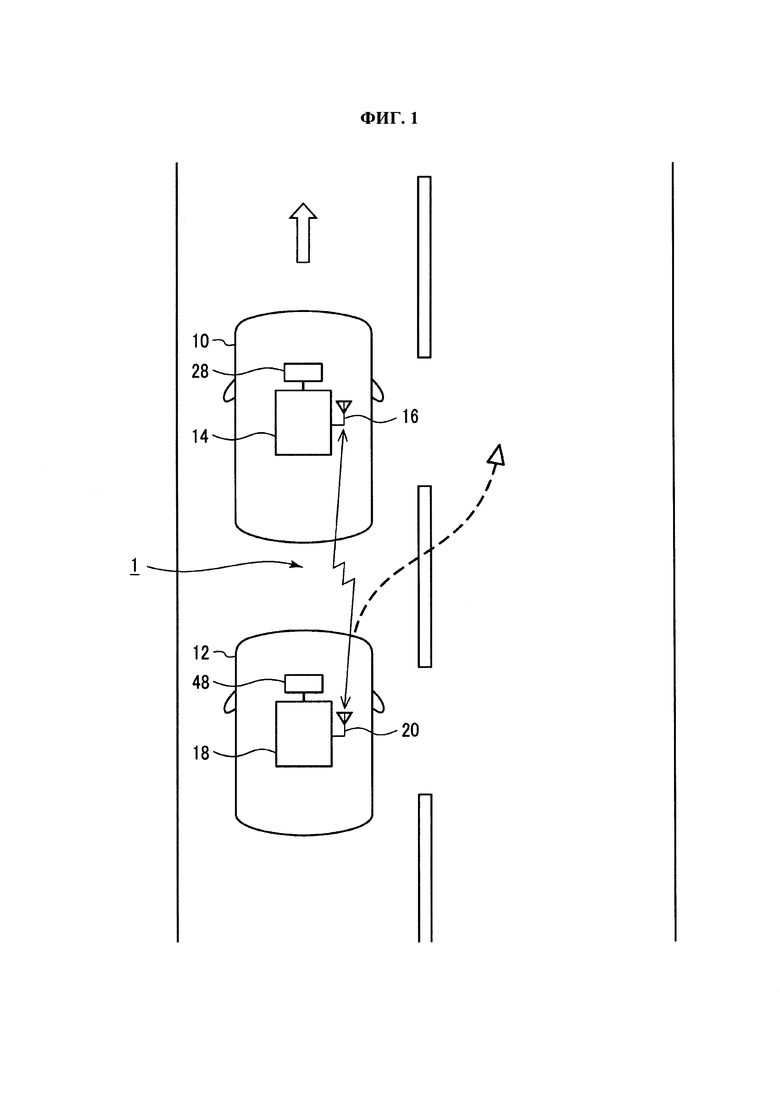
[0018] Фиг. 1 представляет собой вид, иллюстрирующий систему 1 взаимодействия агентов. На фиг. 2А и фиг. 2В представлены виды, иллюстрирующие примеры информации, которая передается водителям агентами при обгоне.
[0019] В системе 1 взаимодействия агентов первый агент 14, установленный на первом транспортном средстве 10, и второй агент 18, установленный на втором транспортном средстве 12, взаимодействуют друг с другом для обмена информацией, касающейся вождения каждого транспортного средства, через первый блок 16 связи и второй блок 20 связи, а обменная информация используется для содействия вождению. Например, первый агент 14 может уведомить первого водителя на борту первого транспортного средства 10 о полезной информации содействия вождению путем получения плана движения или тенденции вождения второго транспортного средства 12, расположенного вблизи первого транспортного средства 10, а второй агент 18 может уведомить второго водителя о полезной информации содействия вождению путем получения плана движения или тенденции вождения первого транспортного средства 10.
[0020] Первый агент 14 и второй агент 18 обмениваются информацией с водителем главным образом посредством диалога и помогают вождению водителя, предлагая информацию о движении, по меньшей мере, либо голосом, либо изображением. Первый агент 14 и второй агент 18 могут взаимодействовать с водителем в терминах движения, но могут также вести ежедневный диалог, не связанный с движением.
[0021] Первый блок 16 связи и второй блок 20 связи обмениваются информацией, касающейся вождения транспортного средства, по меньшей мере, посредством одного из каналов связи между транспортными средствами с использованием инфракрасного лазера или радиоволны, или же связи через ретрансляционное устройство, например, серверное устройство. Идентификатор (ID) транспортного средства присваивается информации, передаваемой как из первого блока 16 связи, так и из второго блока 20 связи.
[0022] В ситуации, показанной на фиг.1, в случае, когда второй водитель на борту второго транспортного средства 12 произносит высказывание, заявляя, что он или она обгонит первое транспортное средство 10, когда второй агент 18 принимает высказывание, второй агент 18 передает первому агенту 14 первого транспортного средства 10 информацию о будущем вождении, обозначающую, что второе транспортное средство 12 планирует обогнать первое транспортное средство 10.
[0023] Первый агент 14 принимает план движения второго транспортного средства 12 и, как показано на фиг. 2А, первый водитель уведомляется информацией содействия вождению для предупреждения первого водителя о том, что второе транспортное средство 12 планирует обгонять первое транспортное средство 10, голосом и изображением, посредством первого передающего устройства 28. Когда первый водитель произносит высказывание, что первый водитель разрешит второму транспортному средству 12 обогнать первое транспортное средство 10 в ответ на уведомление от первого агента 14, первый агент 14 передает второму агенту 18 информацию о будущем вождении первого водителя с указанием разрешения на обгон, а второй агент 18 уведомляет второго водителя об информации содействия вождению, указывающей, что второй водитель может обогнать первое транспортное средство 10, голосом и изображением, с помощью второго передающего устройства 48, как показано на фиг. 2В.
[0024] В качестве альтернативы, первый агент 14 принимает информацию, обозначающую, что второе транспортное средство 12 планирует обогнать первое транспортное средство 10, от второго агента 18 и передает информацию, указывающую параметр вождения первого водителя, второму агенту 18. Когда второй агент 18 определяет, может ли быть выполнен плавный обгон на основе информации, указывающей параметр вождения первого водителя, если определение положительное, второй агент 18 уведомляет второго водителя об информации содействия вождению, указывающей, что второй водитель может обогнать первое транспортное средство 10, голосом и изображением, посредством второго передающего устройства 48, как показано на фиг. 2В.
[0025] Первый водитель может получить уведомление об информации содействия вождению, показывающей план движения второго транспортного средства 12, в соответствии с которым первый водитель может ездить осторожно, не меняя полосу или увеличивая скорость транспортного средства. Второй водитель может получить уведомление об информации содействия вождению на основе информации о будущем вождении первого транспортного средства 10 и выполнить плавный обгон. Таким образом, путем взаимодействия между агентами можно обеспечить содействие вождению.
[0026] Фиг. 3 является схемой, иллюстрирующей функциональную конфигурацию системы 1 взаимодействия агентов. На фиг. 3 каждый элемент, который описывается как функциональный блок, выполняющий различные процессы, может быть образован из схемного блока, устройства запоминания, другой большой интегральной схемы (БИС) и пр. аппаратного обеспечения, и может быть реализован посредством программы, загруженной в устройство запоминания, или тому подобным компонентом программного обеспечения. Поэтому специалистам в данной области техники должно быть понятно, что функциональные блоки могут быть реализованы в различных формах только посредством аппаратного обеспечения, только посредством программного обеспечения или комбинацией аппаратного обеспечения и программного обеспечения, и изобретение не ограничено ни одним из тех, что описаны выше.
[0027] Первое транспортное средство 10 снабжено первым датчиком 22 транспортного средства, первым навигационным устройством 24, первым электронным контроллером 26 и первым передающим устройством 28. Первый датчик 22 транспортного средства включает в себя различные датчики, установленные на первом транспортном средстве 10, например, датчик слежения за окружающим пространством, датчик для определения обстоятельства перемещения, микрофон для получения высказывания от водителя, и тому подобное.
[0028] Датчик слежения за окружающим пространством может включать в себя камеру для визуализации вблизи транспортного средства, радиолокатор или лазер для обнаружения объектов вблизи транспортного средства и т.п., в соответствии с результатом обнаружения, можно получить информацию о местоположении другого транспортного средства вблизи транспортного средства Датчик для определения обстоятельства перемещения может включать в себя датчик для определения скорости транспортного средства, датчик для определения ускорения, датчик для определения угла поворота руля, датчик для измерения величины нажатия тормоза и т.п., и в соответствии с результатом определения, можно получить результат управления транспортным средством, чтобы определить тенденцию вождения водителя. Информация, полученная первым датчиком 22 транспортного средства, передается на первый электронный контроллер 26.
[0029] Первое навигационное устройство 24 получает информацию, обозначающую набор мест назначения для водителя, и информацию о местоположении первого транспортного средства 10 и передает информацию о месте назначения и информацию о местоположении на первый электронный контроллер 26. Первое передающее устройство 28 включает в себя дисплей и динамик и передает информацию водителю под управлением первого электронного контроллера 26.
[0030] Первый электронный контроллер 26 включает в себя первый агент 14, первый блок 16 связи, первый блок 30 получения данных, первый блок 32 получения параметров, первый запоминающий блок 34 и первый блок 36 вывода. Первый блок 30 получения данных собирает информацию об окружающем пространстве, информацию об обстоятельствах движения, информацию о высказываниях, информацию о месте назначения, информацию о местоположении от первого датчика 22 транспортного средства и первого навигационного устройства 24.
[0031] Первый блок 32 получения параметров получает тенденцию вождения водителя на основании информации об обстоятельствах движения, полученной первым блоком 30 получения данных. Первый блок 32 получения параметров подразделяет вождение водителя на множество этапов, таких как мягкое вождение и грубое вождение, на основе информации об обстоятельствах движения, обозначающей предысторию движения, и хранит информацию, обозначающую мягкое вождение, на которую подразделено движение водителя, в качестве тенденции вождения водителя в первом запоминающем блоке 34.
[0032] Первый запоминающий блок 34 хранит персональную информацию, обозначающую пол и возраст водителя, в качестве информации, относящейся к параметрам вождения водителя, вместе с информацией, обозначающей тенденцию вождения водителя. Информация о параметрах вождения водителя включает в себя информацию о параметрах водителя и информацию, обозначающую тенденцию вождения. Кроме того, первый запоминающий блок 34 хранит картографическую информацию.
[0033] Первый блок 36 вывода генерирует звуковые сигналы и сигналы изображения, которые передаются на первое передающее устройство 28, в соответствии с определением первого агента 14, передает сгенерированную информацию на первое передающее устройство 28 и предоставляет информацию водителю.
[0034] Первый агент 14 использует информацию об окружающем пространстве, полученную первым блоком 30 получения данных, информацию об обстоятельствах движения, информацию о высказываниях, информацию о месте назначения и информацию о местоположении, а также информацию, касающуюся параметра вождения водителя, хранимую в первом запоминающем блоке 34 для предоставления информации для содействия вождению путем взаимодействия со вторым агентом 18 второго транспортного средства 12.
[0035] Второе транспортное средство 12 снабжено вторым датчиком 42 транспортного средства, вторым навигационным устройством 44, вторым электронным контроллером 46 и вторым передающим устройством 48, а второй электронный контроллер 46 включает в себя второй агент 18, второй блок 20 связи, второй блок 50 получения данных, второй блок 52 получения параметров, второй запоминающий блок 54 и второй блок 56 вывода. Каждая функция, предусмотренная во втором транспортном средстве 12, такая же, как и в первом транспортном средстве 10, и, следовательно, ее описание не будет повторяться.
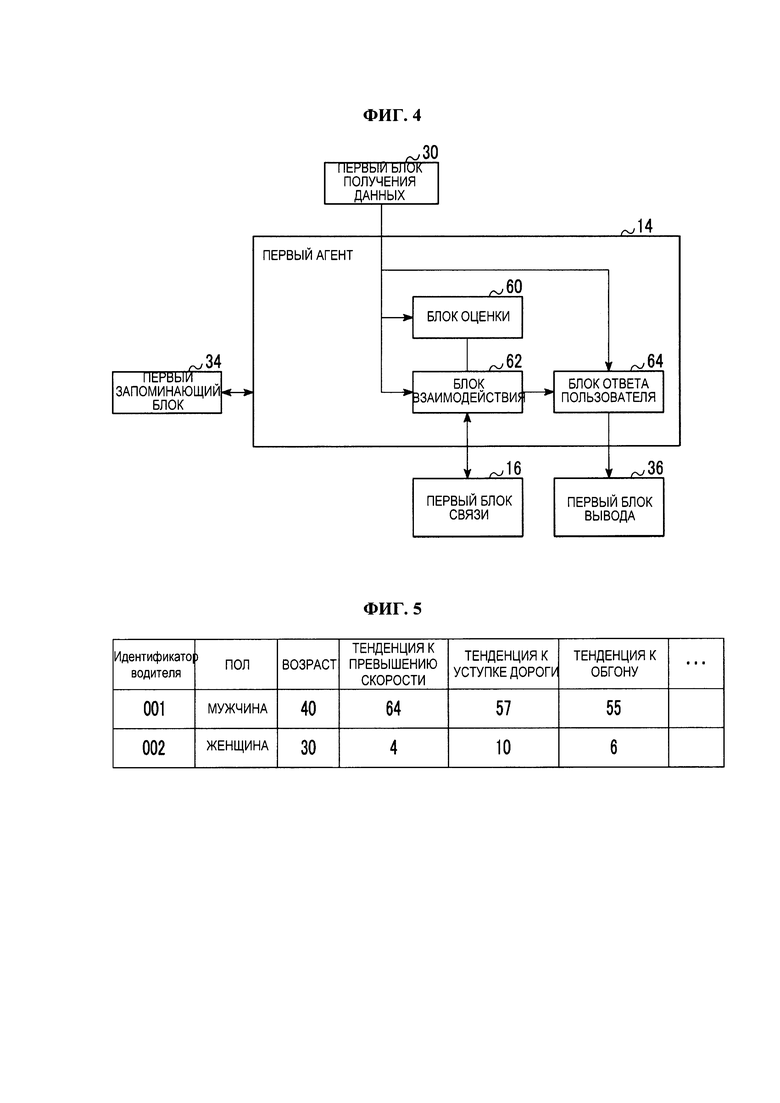
[0036] На фиг. 4 показана схема, иллюстрирующая функциональную конфигурацию первого агента 14. Первый агент 14 включает в себя блок 60 оценки, блок 62 взаимодействия и блок 64 ответа пользователя.
[0037] Блок 64 ответа пользователя обеспечивает связь с водителем, распознавая высказывание первого водителя, и отвечая на высказывание. Блок 64 ответа пользователя выводит не только ответ на высказывание, данное первым водителем, но и звуковое сопровождение высказывания первым водителем и предоставляет информацию содействия вождению первому водителю. Например, блок 64 ответа пользователя выводит звуковое сообщение «куда вы едете?», побуждает первого водителя дать высказывание о месте назначения и выводит звуковое сообщение «пожалуйста, двигайтесь с уменьшенной скоростью» на основе информации о скорости транспортного средства для содействия вождению.
[0038] Блок 64 ответа пользователя обновляет информацию относительно параметра вождения первого водителя на основе высказывания первого водителя. Блок 64 ответа пользователя определяет пол, возраст и характер первого водителя из высказывания первого водителя и запоминает их как параметры вождения первого водителя в первом запоминающем блоке 34. Интерпретация высказывания первого водителя позволяет получить информацию о параметрах вождения первого водителя, отличную от данных о вождении.
[0039] Может предоставляться множество типов информации о параметрах вождения водителя, которое может включать в себя, например, параметры, относящиеся к скорости транспортного средства, параметры, связанные с уступкой дороги, параметры, связанные с обгоном, или т.п.
[0040] Фиг. 5 представляет собой таблицу, показывающую информацию о параметрах вождения водителя. Первый запоминающий блок 34 хранит пол, возраст, параметры, связанные с превышением скорости, параметры, связанные с уступкой дороги, параметры, связанные с обгоном или т.п., в сочетании с идентификатором водителя. Параметр, связанный с превышением скорости, задается частотой превышения скорости и скоростью транспортного средства при движении на превышенной скорости. Параметр, связанный с уступкой дороги, определяется количеством случаев, когда другим транспортным средствам разрешалось подрезать главное транспортное средство с другой полосы, а также количество случаев, когда другим транспортным средствам не разрешалось подрезать главное транспортное средство с другой полосы. Параметр, связанный с обгоном, устанавливается поворотным движением для обгона. Информация о параметрах вождения водителя, включает в себя параметры, обозначающие множество типов тенденций вождения, и параметры используются для извлечения информации содействия вождению. Назначение множества типов тенденций вождения позволяет агенту точно предсказать поведение водителя в соответствии с обстоятельствами движения и предоставить соответствующую информацию содействия вождению.
[0041] В примере, показанном на фиг. 5, первое транспортное средство 10 используется множеством водителей, например, членами семьи, и информация о параметрах вождения запоминается для каждого водителя. Типы параметров представлены численным значением от нуля до 100, и чем выше числовое значение, тем более управление имеет тенденцию быть неровным. На фиг. 5 показано, что водитель в верхней части имеет более жесткую тенденцию вождения, чем водитель в нижней части, легко перемещается с высокой скоростью, с трудом уступает дорогу и его меньше раз обгоняли.
[0042] Информация, касающаяся параметров вождения первого водителя, может быть извлечена на основе информации содействия вождению, предоставленной первым агентом 14, а также высказываний и результатов вождения первого водителя, который получает информацию содействия вождению. Например, когда первый агент 14 предоставляет информацию содействия вождению, говорящую, что «транспортное средство приближается справа» первому водителю, водитель произносит высказывание, в котором говорится, что первый водитель не разрешит другому транспортному средству подрезать главное (в данном случае первое) транспортное средство, и когда водитель не разрешает другому транспортному средству подрезать главное транспортным средство, первый блок 32 получения параметров обновляет параметр, связанный с уступкой дороги, который становится высоким. Напротив, когда первый водитель управляет так, что другой автомобиль может подрезать главное транспортное средство, первый блок 32 получения параметров обновляет параметр, связанный с уступкой дороги, который становится низким. Таким образом, первый агент 14 обновляет каждый параметр, обозначающий тенденцию вождения в соответствии с поведением первого водителя относительно информации содействия вождению, предоставленной от первого агента 14, например, ответ первого водителя на информацию содействия вождению или результат вождения первого водителя на информацию содействия вождению.
[0043] Как видно из фиг. 4, блок 60 оценки получает информацию о месте назначения из высказывания первого водителя и оценивает план движения первого транспортного средства 10 из информации о месте назначения и картографической информации, хранимой в первом запоминающем устройстве 34. Блок 60 оценки может получить информацию о месте назначения, которая не была установлена в первом навигационном устройстве 24, из высказывания первого водителя. Блок 60 оценки оценивает полосу движения на основе дороги, по которой планируется движение первого транспортного средства 10, и маршрута, на котором планируется повернуть направо или налево, исходя из полученной информации о месте назначения. Кроме того, блок 60 оценки получает информацию о месте назначения от первого навигационного устройства 24 и оценивает план движения первого транспортного средства 10 из информации о месте назначения и картографической информации.
[0044] Блок 60 оценки получает информацию о параметрах вождения первого водителя от первого запоминающего блока 34 и оценивает план движения первого транспортного средства 10 на основе информации о параметрах вождения первого водителя. Например, блок 60 оценки оценивает, что на левой полосе скоростной дороги непрерывно выполняется мягкое вождение, когда тенденция вождения водителя мягкая, и оценивает, что быстрое вождение выполняется по правой полосе скоростной автомагистрали и оценивает полосу движения и время изменения полосы движения на основе параметра вождения, когда тенденция вождения водителя является грубой.
[0045] Кроме того, блок 60 оценки оценивает, выполняется ли вождение, разрешающее подрезание или обгон другого транспортного средства, на основе информации, относящейся к параметру вождения первого водителя. Например, блок 60 оценки оценивает, что вождение, которое позволяет подрезание другим транспортным средством во время медленного движения, выполняется, когда тенденция вождения водителя мягкая, и оценивает, что вождение, которое позволяет подрезание другим транспортным средством во время медленного движения, не выполняется, когда тенденция управления водителя грубая.
[0046] Блок 62 взаимодействия определяет информацию о будущем вождении первого водителя на борту первого транспортного средства 10 и передает определенную информацию о будущем вождении второму агенту 18. Информация о будущем вождении первого водителя включает в себя информацию о плане движения, который оценивается блоком 60 оценки и информацию о высказывании, полученном блоком 64 ответа пользователя, и включает в себя информацию о вождении в будущем. Эти части информации могут храниться в первом запоминающем блоке 34. Кроме того, информация о будущем вождении первого водителя информирует о плане движения первого водителя транспортного средства вблизи, по меньшей мере, либо первого транспортного средства 10, либо второго транспортного средства 12. Транспортные средства вблизи, по меньшей мере, либо первого транспортного средства 10, либо второго транспортного средства 12 могут находиться в пределах диапазона, обнаруживаемого, по меньшей мере, либо первым датчиком 22 транспортного средства, либо вторым датчиком 42 транспортного средства. То есть, информация о будущем вождении не является планом движения в отдаленном будущем, например, информацией о месте назначения, и может быть планом движения главного транспортного средства, причем план движения связан с движением другого транспортного средства, расположенного вблизи главного транспортного средства, и в ближайшем будущем, например, «теперь обогнать» и «теперь изменить полосу».
[0047] Информация о будущем вождении, оцениваемая блоком 60 оценки, включает в себя информацию, оцененную из параметров вождения первого водителя, информацию о плане движения, оцененную из высказывания первого водителя и информацию о плане движения, оцененную из информации о месте назначения, назначенном в первом навигационном устройстве 24. Информация о будущем вождении, полученная блоком 64 ответа пользователя, включает в себя информацию о вождении, о которой уведомлен первый водитель, информацию о вождении, которую планируется сообщить первому водителю, а также информацию о вождении, одобренную первым водителем. Эти части информации могут храниться в первом запоминающем устройстве 34.
[0048] Блок 62 взаимодействия извлекает информацию содействия вождению на основе информации, касающейся плана движения второго транспортного средства 12, полученной путем взаимодействия со вторым агентом 18, и уведомляет первого водителя об информации содействия вождению, имеющей содержание о предупреждении обгона, как показано на фиг. 2А, или информации содействия вождению, имеющей содержание предстоящего обгона, как показано на фиг. 2В.
[0049] Первый блок 16 связи передает на второй блок 20 связи информацию о параметрах вождения первого водителя и информацию о будущем вождении и получает от второго блока 20 связи информацию о параметрах вождения второго водителя и информацию о будущем вождении.
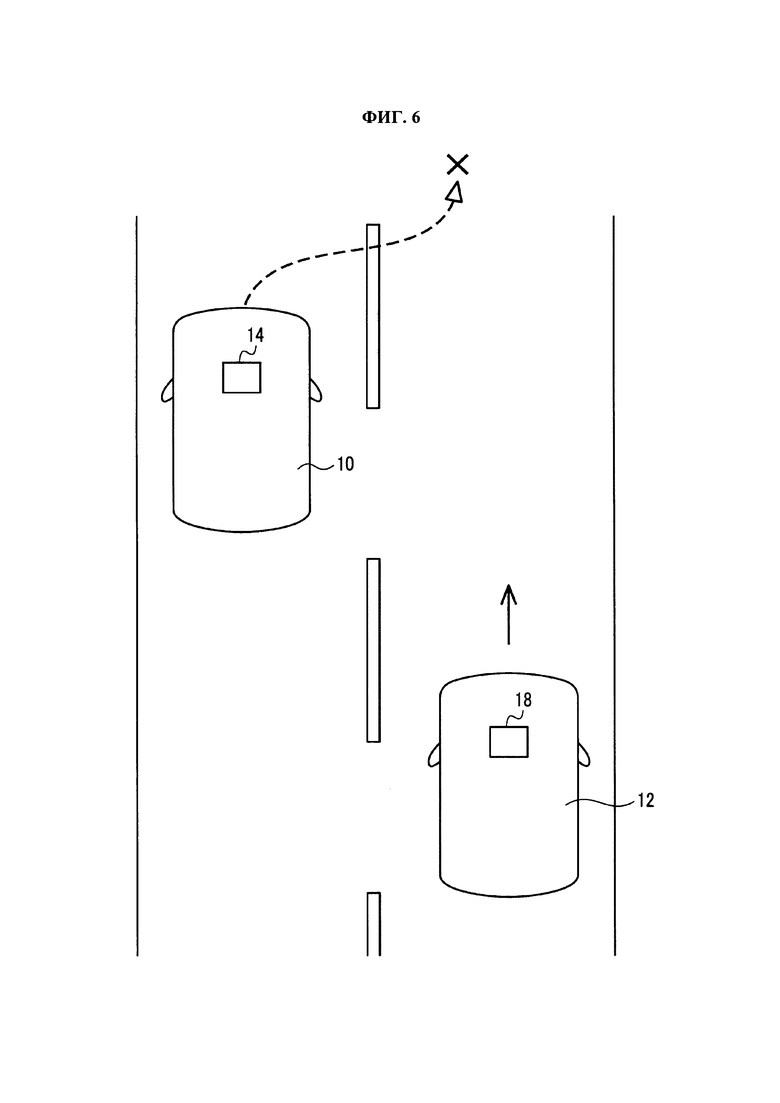
[0050] Фиг. 6 представляет собой вид, иллюстрирующий пример содействия вождению на основе информации о параметрах вождения водителя, полученной путем взаимодействия между агентами. Первый агент 14, который принимает высказывание первого водителя с содержанием, что первый водитель поменяет полосу, получает информацию от второго транспортного средства 12, расположенного вблизи первого транспортного средства 10, исходя из результата определения датчика 22 первого транспортного средства и начинает взаимодействовать со вторым агентом 18. Первый агент 14 может получить информацию о местоположении второго транспортного средства 12 через серверное устройство.
[0051] Второй агент 18 передает первому агенту 14 информацию, обозначающую, что водитель молод, и тенденция вождения является грубой, в качестве информации о параметрах вождения второго водителя, и первый агент 14 генерирует информацию содействия вождению на основе информации о параметрах вождения второго водителя. Первый агент 14 определяет, исходя из параметров вождения второго водителя, что нехорошо менять полосу и подрезать второе транспортное средство 12, генерирует информацию содействия вождению, рекомендующую не менять полосу для подрезания второго транспортного средства 12 и уведомляет первого водителя о сгенерированной информации содействия вождению. Таким образом, первый агент 14 может выполнять содействие вождению, предупреждая первого водителя на основании параметров вождения второго водителя.
[0052] В обстоятельствах движения, показанных на фиг. 6, когда тенденция второго водителя мягкая, первый агент 14 определяет, что первое транспортное средство 10 может изменить полосу и сообщить первому водителю информацию содействия вождению, обозначающую, что может быть выполнено изменение полосы движения.
[0053] Фиг. 7 представляет собой вид, иллюстрирующий пример содействия вождению на основе информации о будущем вождении водителя, полученной в результате взаимодействия между агентами. Первое транспортное средство 10 будет поворачивать направо по дороге Т-образной формы, и первый агент 14 получает информацию о местоположении второго транспортного средства 12 и третьего транспортного средства 70 из результата определения первого датчика 22 транспортного средства.
[0054] Первый агент 14 оценивает, что первое транспортное средство 10 планирует повернуть направо, на основе высказывания первого водителя и передает второму агенту 18 и третьему агенту 72, информацию, указывающую, что первое транспортное средство 10 планирует повернуть направо, в качестве информации о будущем вождении.
[0055] Второй агент 18 и третий агент 72 уведомляют соответствующих водителей о том, что первое транспортное средство 10 планирует повернуть направо. В ответ на уведомление второй водитель сообщает, что первое транспортное средство 10 может подрезать второе транспортное средство 12, а третий водитель сообщает, что первое транспортное средство 10 может проходить первым. Второй агент 18 передает первому агенту 14 информацию, обозначающую, что он/она разрешает правый поворот первого транспортного средства 10, и, таким образом, второе транспортное средство 12 временно останавливается, в качестве информации о будущем вождении, основанной на высказывании второго водителя, а третий агент 72 передает первому агенту 14 информацию, обозначающую, что он / она разрешает правый поворот первого транспортного средства 10, и третье транспортное средство 70 временно останавливается, в качестве информации о будущем вождении, основанной на высказывании третьего водителя.
[0056] Первый агент 14 принимает информацию, касающуюся планов движения второго транспортного средства 12 и третьего транспортного средства 70, генерирует информацию содействия вождению, обозначающую, что первое транспортное средство 10 может сразу повернуть направо и уведомляет первого водителя о сгенерированной информации содействия вождению. Первый водитель просматривает информацию содействия вождению от первого агента 14 для поворота направо и перемещает первое транспортное средство 10 перед вторым транспортным средством 12. Таким образом, планы движения водителей и информация, подтвержденная водителями, могут обмениваться между агентами, и водитель каждого транспортного средства может быть уведомлен об информации о будущем вождении других транспортных средств, находящихся поблизости от него, что позволяет помогать в вождении. При этом информация, представленная агентом и подтвержденная водителем, используется для создания тенденции вождения водителя.
[0057] Фиг. 8 представляет собой вид, иллюстрирующий пример содействия вождению на основе информации о параметрах вождения водителя, и информации о будущем вождении водителя, которые получены путем взаимодействия между агентами. Второй агент 18 получает информацию о местоположении первого транспортного средства 10 из результата определения второго датчика 42 транспортного средства и взаимодействует с первым агентом 14.
[0058] Первый агент 14 получает план движения первого водителя, состоящий в том, что первый автомобиль 10 собирается изменить полосу направо, получает информацию о параметрах вождения первого водителя, то есть информацию, обозначающую, что водителю порядка 60-и лет, и он имеет тенденцию к мягкому вождению, и оценивает, что первый водитель меняет полосу раньше обычного водителя. Первый агент 14 передает второму агенту 18 информацию о будущем вождении, то есть, информацию, обозначающую, что первый водитель планирует поменять полосу. При этом первый агент 14 описывается как оценивающий будущее вождение первого водителя из параметров вождения и плана движения первого водителя, однако изобретение не ограничено этим, а второй агент 18 может оценивать будущее вождение первого водителя при получении параметров вождения и плана движения первого водителя.
[0059] Второй агент 18 уведомляет второго водителя, чтобы тот не совершал обгон, на основе плана движения первого водителя. Таким образом, второй водитель может ехать осторожно, чтобы не обогнать первое транспортное средство 10.
[0060] Специалистам в данной области техники понятно, что пример осуществления изобретения является просто примером того, что различные модификации могут быть сделаны сочетаниями соответствующих составных элементов и что модификации входят в объем изобретения.
[0061] Хотя первый агент 14 и второй агент 18 обеспечивают содействие вождению водителю путем уведомления водителя об информации содействия вождению в примере осуществления изобретения, пример осуществления этим не ограничивается. Например, по меньшей мере, либо первое транспортное средство 10, либо второе транспортное средство 12 может выполнять управление автономным вождением, а информация о будущем вождении другого транспортного средства, полученная путем взаимодействия между первым агентом 14 и вторым агентом 18, может использоваться для управления автономным вождением главного транспортного средства.
[0062] Средство управления автономным вождением выполняет управление поворотом первого транспортного средства 10, показанного на фиг. 7, в качестве примера, и заставляют второе транспортное средство 12 временно останавливаться на основе информации о будущем вождении другого транспортного средства, полученной путем взаимодействия между агентами. Таким образом, информация о будущем вождении другого транспортного средства, полученная путем взаимодействия между агентами, используется для управления автономным вождением, что обеспечивает безопасное управление, при использовании данных о плане движения другого транспортного средства.

Изобретение относится к способу взаимодействия между агентами и энергонезависимому носителю информации. Технический результат заключается в обеспечении взаимодействия между агентами, которые предоставляют содействие вождению, путем уведомления водителей об информации, полученной в результате взаимодействия между агентами и энергонезависимым носителем информации. Способ взаимодействия между агентами включает в себя разрешение первому агенту, установленному на первом транспортном средстве, и второму агенту, установленному на втором транспортном средстве, взаимодействовать друг с другом, определение первым агентом первой информации о будущем вождении первого водителя на борту первого транспортного средства, получение первой информации вторым агентом и уведомление второго водителя на борту второго транспортного средства о первой информации содействия вождению, извлеченной на основе первой информации. 5 н. и 5 з.п. ф-лы, 8 ил.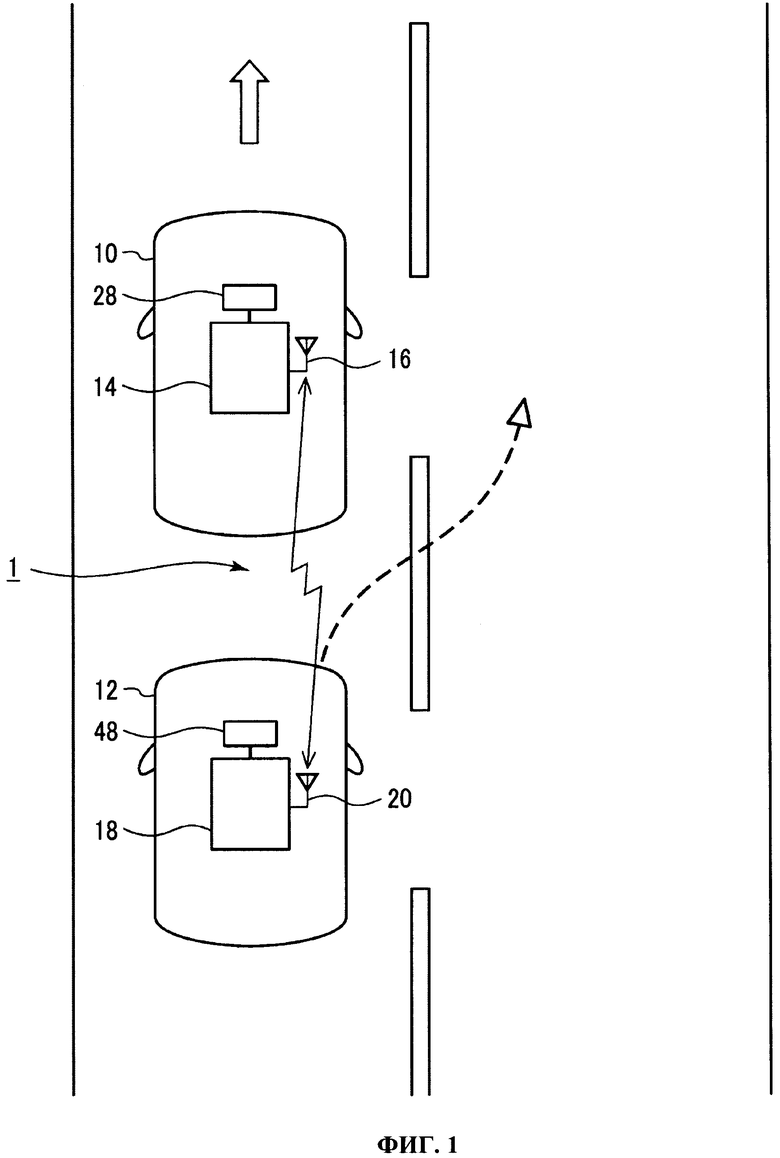
1. Способ взаимодействия между агентами, при этом способ взаимодействия включает в себя:
разрешение первому агенту, являющемуся функциональным блоком первого электронного контроллера, установленного на первом транспортном средстве, и второму агенту, являющемуся функциональным блоком второго электронного контроллера, установленного на втором транспортном средстве, взаимодействовать друг с другом;
определение первым агентом первой информации о будущем вождении первого водителя на борту первого транспортного средства;
получение первой информации вторым агентом и
уведомление второго водителя на борту второго транспортного средства о первой информации содействия вождению, извлеченной на основе первой информации.
2. Способ взаимодействия по п. 1, в котором:
определение первым агентом первой информации включает в себя оценку первым агентом плана движения первого транспортного средства по высказываниям первого водителя;
получение вторым агентом первой информации включает в себя получение вторым агентом информации, касающейся плана движения первого транспортного средства, оцененного первым агентом, в качестве информации о будущем вождении; и
уведомление второго водителя о первой информации содействия вождению включает в себя уведомление второго водителя о первой информации содействия вождению, извлеченной на основе информации, касающейся плана движения первого транспортного средства.
3. Способ взаимодействия по п.1 или 2, дополнительно содержащий:
определение вторым агентом второй информации о будущем вождении второго водителя;
получение второй информации первым агентом; и
уведомление первого водителя о второй информации содействия вождению, извлеченной на основе второй информации.
4. Способ взаимодействия по п. 3, в котором:
определение вторым агентом информации о будущем вождении второго водителя включает в себя определение вторым агентом ответной информации, полученной на основе ответа второго водителя на первую информацию содействия вождению, в качестве информации о будущем вождении второго водителя; и
уведомление первого водителя о второй информации содействия вождению включает в себя уведомление первого водителя о второй информации содействия вождению, извлеченной на основе ответной информации.
5. Способ взаимодействия между агентами, при этом способ взаимодействия включает в себя:
разрешение первому агенту, являющемуся функциональным блоком первого электронного контроллера, установленного на первом транспортном средстве, и второму агенту, являющемуся функциональным блоком второго электронного контроллера, установленного на втором транспортном средстве, взаимодействовать друг с другом;
определение первым агентом информации о будущем вождении первого водителя на борту первого транспортного средства; и
передачу информацию первым агентом для того, чтобы второй агент мог получить информацию.
6. Способ взаимодействия между агентами, являющимися функциональными блоками электронных контроллеров, установленных на транспортных средствах, при этом способ взаимодействия включает в себя:
получение ответной информации, полученной на основе ответа второго водителя на информацию содействия вождению, извлеченную на основе информации, касающейся плана движения первого транспортного средства, в качестве информации о будущем вождении второго водителя; и
уведомление первого водителя об информации содействия вождению, извлеченной на основе ответной информации.
7. Способ взаимодействия по п. 6, дополнительно включающий:
разрешение первому агенту, установленному на первом транспортном средстве, и второму агенту, установленному на втором транспортном средстве, взаимодействовать друг с другом;
получение вторым агентом первой информации о будущем вождении первого водителя на борту первого транспортного средства; и
уведомление второго водителя на борту второго транспортного средства об информации содействия вождению, извлеченной на основе первой информации.
8. Способ взаимодействия по п. 7, дополнительно включающий:
определение ответной информации, полученной на основе ответа второго водителя на информацию содействия вождению, извлеченную на основе информации, касающейся плана движения первого транспортного средства, в качестве второй информации о будущем вождении второго водителя; при этом первая информация включает в себя план движения первого транспортного средства, и
передачу ответной информации, чтобы первый агент мог получить ответную информацию.
9. Энергонезависимый носитель информации, хранящий информацию о будущем вождении первого водителя на борту первого транспортного средства, при этом информация о будущем вождении первого водителя определена первым агентом, являющимся функциональным блоком первого электронного контроллера, установленного на первом транспортном средстве, принята вторым агентом, являющимся функциональным блоком второго электронного контроллера, установленного на втором транспортном средстве, и использована для извлечения информации содействия вождению для уведомления второго водителя на борту второго транспортного средства.
10. Энергонезависимый носитель информации, хранящий ответную информацию, полученную на основе ответа второго водителя на борту второго транспортного средства на информацию содействия вождению, извлеченную на основе информации, касающейся плана движения первого транспортного средства, при этом ответная информация определена вторым агентом, являющимся функциональным блоком второго электронного контроллера, установленного на втором транспортном средстве, получена первым агентом, являющимся функциональным блоком первого электронного контроллера, установленного на первом транспортном средстве, и использована для извлечения информации содействия вождению для уведомления второго водителя.
| US 2012095641 A1, 19.04.2012 | |||
| US 2015353094 A1, 10.12.2015 | |||
| WO 2016178190 A1, 10.11.2016 | |||
| US 2016244055 A1, 25.08.2016 | |||
| US 2016036917 A1, 04.02.2016. |

