УРОВЕНЬ ТЕХНИКИ
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Изобретение относится к системе транспортного средства.
ОПИСАНИЕ ПРЕДШЕСТВУЮЩЕГО УРОВНЯ ТЕХНИКИ
[0002] Патент США № 8670891 известен как пример технического документа, связанного с системой транспортного средства. Согласно описанию патента США № 8670891, по меньшей мере, одно из рабочей величины операции руления водителя, рабочей величины операции нажатия педали тормоза водителя и рабочей величины операции нажатия педали акселератора водителя отслеживается во время автономного вождения транспортного средства, и состояние автономного вождения прекращается для переключения в состояние вождения вручную в случае, если отслеживаемая рабочая величина превышает предварительно определенное пороговое значение.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0003] Тем не менее, для водителя может быть невозможным выполнять переключение в состояние вождения вручную в намеченное время, поскольку не выявляется минимальная рабочая величина, вводимая водителем для переключения из состояния автономного вождения в состояние вождения вручную. Это является общераспространенным для переключения между состоянием вождения, в котором выполняется управление помощью при вождении, к примеру, с помощью системы помощи для удержания на полосе движения (LKA) и адаптивной системы оптимального регулирования скорости (ACC), и состоянием вождения вручную.
[0004] Настоящее изобретение предоставляет систему транспортного средства, которая выявляет минимальную рабочую величину, вводимую водителем для переключения из состояния автономного вождения в состояние вождения вручную.
[0005] Система транспортного средства согласно аспекту изобретения включает в себя модуль получения информации операций вождения, получающий рабочую величину операции вождения водителя, модуль переключения состояния вождения, переключающий состояние вождения транспортного средства между первым состоянием вождения и вторым состоянием вождения на основе взаимосвязи между рабочей величиной и первым пороговым значением, причем первое состояние вождения включает в себя, по меньшей мере, одно из состояния автономного вождения, в котором движение транспортного средства управляется посредством использования плана движения, сформированного на основе периферийной информации касательно транспортного средства и картографической информации, предоставленной заранее для транспортного средства, и состояния совместного вождения, в котором транспортному средству разрешается двигаться с помощью управления транспортным средством на основе периферийной информации касательно транспортного средства и операции вождения водителя, действующих совместно друг с другом, и причем второе состояние вождения обеспечивает возможность отражения операции вождения водителя при движении транспортного средства, и модуль уведомления, уведомляющий водителя о взаимосвязи между первым пороговым значением и состоянием рабочей величины.
[0006] Система транспортного средства согласно аспекту изобретения, которая переключает транспортное средство из первого состояния вождения во второе состояние вождения, когда рабочая величина операции водителя становится равной или превышающей первое пороговое значение, содержит модуль уведомления, который уведомляет водителя о состоянии рабочей величины относительно первого порогового значения, и в силу этого водитель может иметь сведения по рабочей величине до тех пор, пока состояние вождения транспортного средства не переключится. Соответственно, водитель может выполнять переключение состояния вождения в зависимости от рабочей величины в намеченное время с помощью этой системы транспортного средства.
[0007] В системе транспортного средства согласно аспекту изобретения, модуль уведомления может представлять собой модуль отображения, отображающий взаимосвязь между первым пороговым значением и состоянием рабочей величины.
[0008] В системе транспортного средства согласно аспекту изобретения, рабочая величина может представлять собой, по меньшей мере, одно из операции руления, операции нажатия педали акселератора и операции нажатия педали тормоза транспортного средства.
[0009] В системе транспортного средства согласно аспекту изобретения, модуль переключения состояния вождения может переключать транспортное средство во второе состояние, когда рабочая величина становится равной или превышающей первое пороговое значение в случае, если транспортное средство находится в первом состоянии вождения.
[0010] В системе транспортного средства согласно аспекту изобретения, как состояние автономного вождения, так и состояние совместного вождения могут быть включены в первое состояние вождения, модуль переключения состояния вождения может переключать транспортное средство в состояние совместного вождения, когда рабочая величина становится равной или превышающей второе пороговое значение и меньшей первого порогового значения в случае, если транспортное средство находится в состоянии автономного вождения, может переключать транспортное средство в состояние автономного вождения, когда рабочая величина становится меньше второго порогового значения в случае, если транспортное средство находится в состоянии совместного вождения, и может переключать транспортное средство во второе состояние вождения, когда рабочая величина становится равной или превышающей первое пороговое значение в случае, если состояние вождения транспортного средства представляет собой состояние совместного вождения, и модуль уведомления может уведомлять состояние рабочей величины относительно первого порогового значения и второго порогового значения. Согласно этой системе транспортного средства, модуль уведомления уведомляет о состоянии рабочей величины относительно первого порогового значения и второго порогового значения для переключения состояния вождения транспортного средства, и за счет этого водитель может выполнять переключение состояния вождения в зависимости от рабочей величины в намеченное время.
[0011] Как описано выше, система транспортного средства согласно различным аспектам изобретения обеспечивает возможность водителю выполнять переключение состояния вождения в зависимости от рабочей величины в намеченное время.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0012] Признаки, преимущества и техническая и промышленная значимость примерных вариантов осуществления изобретения описываются ниже со ссылкой на прилагаемые чертежи, на которых аналогичные номера обозначают аналогичные элементы, и на которых:
Фиг. 1 является блок-схемой, иллюстрирующей конфигурацию системы 100 транспортного средства согласно этому варианту осуществления;
Фиг. 2 является блок-схемой, показывающей ECU на фиг. 1;
Фиг. 3 является схемой, показывающей пример взаимосвязи между рабочей величиной и переходом состояния вождения;
Фиг. 4A-4D являются схемами, иллюстрирующими пример отображения в качестве строки индикаторов относительно состояния рабочей величины относительно порогового значения определения вмешательства и порогового значения инициирования вождения вручную;
Фиг. 5 является блок-схемой последовательности операций способа, показывающей пример обработки формирования плана движения;
Фиг. 6 является блок-схемой последовательности операций способа, показывающей пример обработки переключения для переключения состояния вождения из состояния автономного вождения или состояния совместного вождения посредством использования рабочей величины операции вождения;
Фиг. 7A-7C являются схемами, показывающими пример взаимосвязи рабочей величины с переходом состояния вождения, включением/выключением уведомлений о текущем состоянии вождения и рабочим противодействием, соответственно;
Фиг. 8A-8D являются схемами, показывающими пример взаимосвязи увеличения рабочей величины с переходом состояния вождения, включением/выключением уведомлений после миграции, включением/выключением уведомлений перед миграцией и рабочим противодействием, соответственно;
Фиг. 9A-9D являются схемами, показывающими пример взаимосвязи снижения рабочей величины с переходом состояния вождения, включением/выключением уведомлений после миграции, включением/выключением уведомлений перед миграцией и рабочим противодействием, соответственно;
Фиг. 10 является блок-схемой последовательности операций способа, показывающей пример обработки формирования плана движения;
Фиг. 11 является блок-схемой последовательности операций способа, показывающей пример обработки переключения для переключения состояния вождения из состояния вождения вручную посредством использования рабочей величины операции вождения;
Фиг. 12 является блок-схемой последовательности операций способа, показывающей пример обработки переключения для переключения состояния вождения из состояния автономного вождения или состояния совместного вождения посредством использования рабочей величины операции вождения;
Фиг. 13 является блок-схемой последовательности операций способа, показывающей пример обработки отображения рабочей величины;
Фиг. 14A-14C являются схемами, показывающими другой пример взаимосвязи увеличения рабочей величины с переходом состояния вождения, включением/выключением уведомлений после миграции и включением/выключением уведомлений перед миграцией, соответственно;
Фиг. 15A-15C являются схемами, показывающими другой пример взаимосвязи снижения рабочей величины с переходом состояния вождения, включением/выключением уведомлений после миграции и включением/выключением уведомлений перед миграцией, соответственно; и
Фиг. 16A-16C являются схемами, показывающими еще один другой пример взаимосвязи увеличения рабочей величины с переходом состояния вождения, включением/выключением уведомлений после миграции и включением/выключением уведомлений перед миграцией, соответственно.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0013] В дальнейшем в этом документе описывается вариант осуществления изобретения со ссылкой на прилагаемые чертежи. На чертежах, одни и те же ссылочные позиции используются для того, чтобы означать одни и те же или соответствующие части, и повторяющееся описание опускается.
[0014] Фиг. 1 является блок-схемой, иллюстрирующей конфигурацию системы 100 транспортного средства согласно этому варианту осуществления. Фиг. 2 является блок-схемой, показывающей электронный модуль 10 управления (ECU) системы 100 транспортного средства на фиг. 1. Как проиллюстрировано на фиг. 1, система 100 транспортного средства установлена на транспортном средстве V, таком как легковой автомобиль. Система 100 транспортного средства содержит внешний датчик 1, модуль 2 приемного устройства на основе глобальной системы позиционирования (GPS), внутренний датчик 3, картографическую базу 4 данных, навигационную систему 5, актуатор 6, человеко-машинный интерфейс 7 (HMI) и ECU 10.
[0015] Внешний датчик 1 представляет собой обнаруживающий измерительный прибор, который обнаруживает внешнюю ситуацию в качестве периферийной информации касательно транспортного средства V. Внешний датчик 1 включает в себя, по меньшей мере, одно из камеры, радара и лазерной системы обнаружения и измерения дальности (лидара).
[0016] Камера представляет собой прибор для обработки изображений, который формирует изображение внешней ситуации относительно транспортного средства V. Камера располагается, например, с задней стороны ветрового стекла транспортного средства V. Камера может представлять собой монокулярную камеру либо может представлять собой стереокамеру. Стереокамера имеет, например, два модуля формирования изображений, которые выполнены с возможностью воспроизводить бинокулярную диспаратность. Информация направления глубины включена в информацию изображений, сформированную посредством стереокамеры. Камера выводит сформированную информацию изображений, связанную с внешней ситуацией относительно транспортного средства V, в ECU 10.
[0017] Радар обнаруживает объект за пределами транспортного средства V посредством использования радиоволн. Радиоволны являются, например, миллиметровыми волнами. Радар обнаруживает объект посредством передачи радиоволн в область, окружающую транспортное средство V, и приема радиоволн, отражаемых посредством объекта. Радар может выводить, например, расстояние до объекта или направление объекта в качестве информации объектов. Радар выводит обнаруженную информацию объектов в ECU 10. В случае, если выполняется сбор и обработка данных от различных датчиков, информация приема относительно отраженных радиоволн может выводиться в ECU 10.
[0018] Лидар обнаруживает объект за пределами транспортного средства V посредством использования света. Лидар измеряет расстояние до точки отражения и обнаруживает объект посредством пропускания света в область, окружающую транспортное средство V, и приема света, отражаемого посредством объекта. Лидар может выводить, например, расстояние до объекта или направление объекта в качестве информации объектов. Лидар выводит обнаруженную информацию объектов в ECU 10. В случае, если выполняется сбор и обработка данных от различных датчиков, информация приема относительно отраженного света может выводиться в ECU 10. Камера, лидар и радар не обязательно должны предоставляться одновременно.
[0019] Модуль 2 приемного GPS-устройства получает позиционную информацию, показывающую позицию транспортного средства V, посредством приема сигналов, по меньшей мере, из трех GPS-спутников. Позиционная информация включает в себя, например, широту и долготу. Модуль 2 приемного GPS-устройства выводит измеренную позиционную информацию транспортного средства V в ECU 10. Другие средства для предоставления возможности идентификации широты и долготы, на которой присутствует транспортное средство V, могут использоваться вместо модуля 2 приемного GPS-устройства.
[0020] Внутренний датчик 3 представляет собой детектор, который обнаруживает информацию, коррелированную с состоянием движения транспортного средства V, и информацию, коррелированную с операцией вождения, выполняемой водителем, который управляет транспортным средством V (информацию операций вождения). Внутренний датчик 3 включает в себя, по меньшей мере, один из датчика скорости транспортного средства, датчика ускорения и датчика скорости относительно вертикальной оси, с тем чтобы обнаруживать информацию, коррелированную с состоянием движения транспортного средства V. Помимо этого, внутренний датчик 3 включает в себя, по меньшей мере, один из датчика нажатия педали акселератора, датчика нажатия педали тормоза и датчика рулевого управления, с тем чтобы обнаруживать информацию операций вождения.
[0021] Датчик скорости транспортного средства представляет собой детектор, который обнаруживает скорость транспортного средства V. Датчик скорости вращения колес транспортного средства используется в качестве примера датчика скорости транспортного средства. Датчик скорости вращения колес транспортного средства располагается относительно колеса транспортного средства для транспортного средства V, ведущего вала, который вращается как одно целое с колесом транспортного средства, и т.п. и обнаруживает скорость вращения колеса транспортного средства. Датчик скорости транспортного средства выводит информацию скорости транспортного средства (информацию скорости вращения колес транспортного средства), которая включает в себя скорость транспортного средства V, в ECU 10.
[0022] Датчик ускорения представляет собой детектор, который обнаруживает ускорение транспортного средства V. Датчик ускорения включает в себя, например, датчик продольного ускорения, который обнаруживает продольное ускорение транспортного средства V, и датчик поперечного ускорения, который обнаруживает поперечное ускорение транспортного средства V. Датчик ускорения выводит информацию ускорения, которая включает в себя ускорение транспортного средства V, в ECU 10.
[0023] Датчик скорости относительно вертикальной оси представляет собой детектор, который обнаруживает скорость относительно вертикальной оси (угловую скорость вращения) вокруг вертикальной оси центра тяжести транспортного средства V. Гиродатчик может использоваться в качестве примера датчика скорости относительно вертикальной оси. Датчик скорости относительно вертикальной оси выводит информацию скорости относительно вертикальной оси, которая включает в себя скорость относительно вертикальной оси транспортного средства V, в ECU 10.
[0024] Датчик нажатия педали акселератора представляет собой детектор, который обнаруживает, например, величину нажатия педали акселератора. Величина нажатия педали акселератора представляет собой, например, позицию педали акселератора (позицию педали) относительно предварительно определенной позиции в качестве опорной позиции. Предварительно определенная позиция может представлять собой фиксированную позицию либо может представлять собой позицию, измененную посредством предварительно определенного параметра. Датчик нажатия педали акселератора располагается относительно, например, части вала педали акселератора транспортного средства V. Датчик нажатия педали акселератора выводит рабочую информацию, коррелированную с величиной нажатия педали акселератора, в ECU 10. Датчик нажатия педали акселератора обнаруживает позицию педали, отражающую как операцию нажатия педали акселератора, так и ввод управления системой в случае, если позиция педали для педали акселератора перемещается в соответствии с целевым значением управления нажатием педали акселератора, включенным в план движения (описан ниже). Датчик нажатия педали акселератора обнаруживает позицию педали, коррелированную с операцией нажатия педали акселератора в случае, если позиция педали для педали акселератора не перемещается в соответствии с целевым значением управления нажатием педали акселератора, включенным в план движения (описан ниже).
[0025] Датчик нажатия педали тормоза представляет собой детектор, который обнаруживает, например, величину нажатия педали тормоза. Величина нажатия педали тормоза представляет собой, например, позицию педали тормоза (позицию педали) относительно предварительно определенной позиции в качестве опорной позиции. Предварительно определенная позиция может представлять собой фиксированную позицию либо может представлять собой позицию, измененную посредством предварительно определенного параметра. Датчик нажатия педали тормоза располагается относительно, например, части педали тормоза. Датчик нажатия педали тормоза может обнаруживать рабочую силу нажатия педали тормоза (силу надавливания педали тормоза, давление в главном цилиндре и т.п.). Датчик нажатия педали тормоза выводит рабочую информацию, коррелированную с величиной или рабочей силой нажатия педали тормоза, в ECU 10. Датчик нажатия педали тормоза обнаруживает позицию педали, отражающую как операцию нажатия педали тормоза, так и ввод управления системой в случае, если позиция педали для педали тормоза перемещается в соответствии с целевым значением управления нажатием педали тормоза, включенным в план движения (описан ниже). Датчик нажатия педали тормоза обнаруживает позицию педали, коррелированную с операцией нажатия педали тормоза в случае, если позиция педали для педали тормоза не перемещается в соответствии с целевым значением управления нажатием педали тормоза, включенным в план движения (описан ниже).
[0026] Датчик рулевого управления представляет собой детектор, который обнаруживает, например, состояние вращения при рулении. Определенное значение состояния вращения представляет собой, например, крутящий момент поворота при рулении или угол поворота при рулении. Датчик рулевого управления располагается относительно, например, рулевого вала транспортного средства V. Датчик рулевого управления выводит информацию, включающую в себя крутящий момент поворота при рулении или угол поворота при рулении, в ECU 10. Датчик рулевого управления обнаруживает крутящий момент или угол поворота при рулении, отражающий как операцию руления, так и ввод управления системой в случае вращения при рулении в соответствии с целевым значением управления при рулении, включенным в план движения (описан ниже). Ниже описываются подробности относительно получения информации относительно рабочей величины операции вождения водителя, связанной с этим случаем. Датчик рулевого управления обнаруживает крутящий момент или угол поворота при рулении, коррелированный с операцией руления в случае отсутствия вращения при рулении, в соответствии с целевым значением управления при рулении, включенным в план движения (описан ниже).
[0027] Картографическая база 4 данных представляет собой базу данных, содержащую картографическую информацию. Картографическая база 4 данных формируется на жестком диске (HDD), установленном на транспортном средстве V, и т.п. Примеры картографической информации включают в себя позиционную информацию дороги, информацию формы дороги и позиционную информацию перекрестков и скрещений дорог. Примеры информации формы дороги включают в себя типы кривой и прямого участка, а также кривизну кривой. Выходной сигнал внешнего датчика 1 может быть включен в картографическую информацию в случае, если система 100 транспортного средства использует позиционную информацию по экранирующей конструкции, такой как здание и стена, или технологию одновременной локализации и отображения на карте (SLAM). Картографическая база 4 данных может сохраняться в компьютере в инфраструктурном объекте, таком как центр обработки информации, который допускает обмен данными с транспортным средством V.
[0028] Навигационная система 5 представляет собой устройство, которое направляет водителя транспортного средства V в пункт назначения, который задается на карте водителя транспортного средства V. Навигационная система 5 вычисляет маршрут для движения транспортного средства V на основе позиционной информации транспортного средства V, измеряемой посредством модуля 2 приемного GPS-устройства, и картографической информации из картографической базы 4 данных. Маршрут, например, может представлять собой маршрут, идентифицирующий полосу движения, по которой движется транспортное средство V, в участках множества полос движения. Навигационная система 5 вычисляет, например, целевой маршрут для достижения пункта назначения из позиции транспортного средства V и информирует водителя о целевом маршруте посредством дисплея или аудиовывода из динамика. Навигационная система 5 выводит, например, информацию относительно целевого маршрута транспортного средства V в ECU 10. Навигационная система 5 может использовать информацию, сохраненную в компьютере в инфраструктурном объекте, таком как центр обработки информации, который допускает обмен данными с транспортным средством V. Альтернативно, часть обработки, которая выполняется посредством навигационной системы 5, может выполняться посредством компьютера в инфраструктурном объекте.
[0029] Актуатор 6 представляет собой устройство, которое выполняет управление движением для транспортного средства V. Актуатор 6 включает в себя, по меньшей мере, актуатор дросселя, тормозной актуатор и актуатор рулевого управления. Актуатор дросселя управляет объемом воздуха, поданным в двигатель (степенью открытия дросселя), в соответствии с управляющим сигналом из ECU 10, и управляет движущей силой транспортного средства V. В случае, если транспортное средство V представляет собой гибридный автомобиль или электромобиль, движущая сила управляется посредством управляющего сигнала из ECU 10, вводимого в электромотор в качестве источника питания. В этом случае, актуатор дросселя не включен в актуатор 6.
[0030] Тормозной актуатор управляет тормозной системой в соответствии с управляющим сигналом из ECU 10 и управляет тормозной силой, которая прикладывается к колесу транспортного средства для транспортного средства V. Гидравлическая тормозная система может использоваться в качестве примера тормозной системы. Актуатор рулевого управления управляет приведением в действие вспомогательного электромотора для управления крутящим моментом поворота при рулении системы электроусилителя руля в соответствии с управляющим сигналом из ECU 10. Таким образом, актуатор рулевого управления управляет крутящим моментом поворота при рулении транспортного средства V (крутящим моментом поворота при рулении).
[0031] HMI 7 представляет собой интерфейс, который обеспечивает вывод и ввод информации между пассажирами в транспортном средстве V (включающими в себя водителя) и системой 100 транспортного средства. HMI 7 содержит, например, модуль 7a отображения, который отображает информацию изображений для водителя, модуль 7b аудиовывода для аудиовывода и функциональную кнопку или сенсорную панель, которая обеспечивает возможность выполнения операции ввода пассажиром. Множество типов дисплеев могут составлять модуль 7a отображения. Например, модуль 7a отображения включает в себя, по меньшей мере, один из MID комбинации приборов, центрального дисплея приборной панели, дисплея проекции на лобовое стекло (HUD) и надеваемого водителем носимого устройства в форме очков. Модуль 7a отображения отображает информацию изображений в соответствии с управляющим сигналом из ECU 10. Модуль 7b аудиовывода представляет собой динамик, который уведомляет водителя посредством предупреждающего звука или аудиовывода. Множество динамиков может составлять модуль 7b аудиовывода, или модуль 7b аудиовывода может быть выполнен с возможностью включать в себя встроенный динамик в транспортном средстве V. Например, модуль 7b аудиовывода включает в себя, по меньшей мере, одно из динамика, расположенного с тыльной стороны приборной панели транспортного средства V, динамика, расположенного внутри дверцы водительского сиденья транспортного средства V, и т.п. Модуль 7b аудиовывода предоставляет водителю предупреждающий звук или аудиовывод в соответствии с управляющим сигналом из ECU 10. Модуль 7a отображения и модуль 7b аудиовывода не обязательно составляют части HMI 7. Модуль 7a отображения и модуль 7b аудиовывода могут предоставляться отдельно.
[0032] Как проиллюстрировано на фиг. 2, HMI 7 включает в себя переключатель 70 для включения/выключения автономного вождения, который представляет собой модуль ввода для ввода операции запроса на инициирование автономного вождения пассажира. Переключатель 70 для включения/выключения автономного вождения может быть выполнен с возможностью обеспечивать возможность пассажиру вводить операцию запроса, связанную с завершением автономного вождения. Когда операция запроса, связанная с инициированием или завершением автономного вождения, выполняется пассажиром, переключатель 70 для включения/выключения автономного вождения выводит информацию, показывающую инициирование автономного вождения или завершение автономного вождения, в ECU 10. Модуль ввода не ограничен переключателем. Модуль ввода может иметь любую форму в той мере, в какой может вводиться информация, с помощью которой может определяться намерение водителя относительно инициирования или завершения автономного вождения. Например, модуль ввода может представлять собой кнопку инициирования автономного вождения, кнопку завершения автономного вождения и т.п., либо может представлять собой объект переключателя или кнопки, отображаемой на экране (сенсорной панели), которая может управляться водителем. В случае, если пункт назначения, в котором автономное вождение завершается, достигнут, HMI 7 уведомляет пассажира в отношении прибытия в пункт назначения. HMI 7 может выводить информацию пассажиру посредством использования портативного информационного терминала с беспроводным подключением либо может подвергаться операции ввода пассажира посредством использования портативного информационного терминала.
[0033] ECU 10, который проиллюстрирован на фиг. 1 и 2, управляет автономным движением транспортного средства V. ECU 10 представляет собой электронный модуль управления, который имеет центральный процессор (CPU), постоянное запоминающее устройство (ROM), оперативное запоминающее устройство (RAM) и т.п. ECU 10 выполняет различные типы управления посредством загрузки программы, сохраненной в ROM, в RAM и выполнения программы с помощью CPU. Множество электронных модулей управления могут составлять ECU 10.
[0034] Как проиллюстрировано на фиг. 1 и 2, ECU 10 содержит модуль 11 распознавания позиций транспортного средства, модуль 12 распознавания внешней ситуации, модуль 13 распознавания состояний движения, модуль 14 формирования плана движения, модуль 15 получения информации операций вождения, модуль 16 переключения состояния вождения, модуль 17 управления движением и модуль 18 вывода информации.
[0035] Модуль 11 распознавания позиций транспортного средства распознает позицию транспортного средства V на карте (в дальнейшем в этом документе называемую "позицией транспортного средства") на основе позиционной информации транспортного средства V, принимаемой посредством модуля 2 приемного GPS-устройства, и картографической информации из картографической базы 4 данных. Модуль 11 распознавания позиций транспортного средства может распознавать позицию транспортного средства посредством получения позиции транспортного средства, используемой в навигационной системе 5, из навигационной системы 5. В случае, если позиция транспортного средства для транспортного средства V может измеряться посредством датчика, расположенного снаружи, такого как датчик, расположенный на дороге, модуль 11 распознавания позиций транспортного средства может получать позицию транспортного средства из этого датчика посредством связи (связи между транспортным средством и дорожной инфраструктурой).
[0036] Модуль 12 распознавания внешней ситуации распознает внешнюю ситуацию относительно транспортного средства V на основе результата обнаружения внешнего датчика 1. Примеры результата обнаружения включают в себя информацию изображений, сформированную посредством камеры, информацию объектов радара и информацию объектов лидара. Примеры внешней ситуации могут включать в себя позицию сигнальной линии дорожной разметки полосы движения или позицию центра полосы движения относительно транспортного средства V, ширину дороги и форму дороги. Примеры формы дороги могут представлять собой кривизну полосы движения, изменение градиента поверхности дороги, эффективное для прогноза и оценки посредством внешнего датчика 1, неровности и т.п. Внешняя ситуация может представлять собой ситуацию относительно объекта, к примеру, помеху около транспортного средства V. Примеры ситуации относительно объекта могут включать в себя информацию для отличения стационарной помехи от подвижной помехи, позицию помехи относительно транспортного средства V, направление, в котором помеха перемещается относительно транспортного средства V, и относительную скорость помехи относительно транспортного средства V. Модуль 12 распознавания внешней ситуации может корректировать позицию и направление транспортного средства V, полученные посредством модуля 2 приемного GPS-устройства и т.п., посредством обращения к результату обнаружения внешнего датчика 1 и картографической информации, так что точность повышается.
[0037] Модуль 13 распознавания состояний движения распознает состояние движения транспортного средства V на основе результата обнаружения внутреннего датчика 3. Примеры результата обнаружения внутреннего датчика 3 включают в себя информацию скорости транспортного средства из датчика скорости транспортного средства, информацию ускорения из датчика ускорения и информацию скорости относительно вертикальной оси из датчика скорости относительно вертикальной оси. Примеры информации, показывающей состояние движения транспортного средства V, включают в себя скорость, ускорение и скорость относительно вертикальной оси транспортного средства.
[0038] Модуль 14 формирования плана движения формирует курс для транспортного средства V, например, на основе целевого маршрута, вычисленного посредством навигационной системы 5, позиции транспортного средства, распознанной посредством модуля 11 распознавания позиций транспортного средства, и внешней ситуации относительно транспортного средства V (включающей в себя позицию и ориентацию транспортного средства), распознанной посредством модуля 12 распознавания внешней ситуации. Курс представляет собой траекторию транспортного средства V по целевому маршруту. Модуль 14 формирования плана движения формирует курс для движения транспортного средства V по целевому маршруту при удовлетворении нормативных документов относительно безопасности, соблюдения правовых норм, эффективности движения и т.п. Помимо этого, модуль 14 формирования плана движения формирует курс для транспортного средства V таким образом, чтобы не допускать контакта с объектом, на основе ситуации объекта около транспортного средства V.
[0039] Целевой маршрут, описанный в этом подробном описании, включает в себя маршрут движения, который автоматически формируется на основе внешней ситуации и картографической информации, когда задание пункта не выполнено явно водителем, такой как маршрут движения по дороге согласно документу "DRIVING SUPPORT DEVICE", описанному в публикации патента Япония № 5382218 (WO 2011/158347), или "AUTONOMOUS DRIVING DEVICE", описанному в публикации заявки на патент Япония номер 2011-162132.
[0040] Модуль 14 формирования плана движения формирует план движения, коррелированный со сформированным курсом. Другими словами, модуль 14 формирования плана движения формирует план движения вдоль целевого маршрута, заданного заранее на карте, на основе, по меньшей мере, внешней ситуации в качестве периферийной информации касательно транспортного средства V и картографической информации из картографической базы 4 данных. Относительно курса транспортного средства V модуль 14 формирования плана движения формирует план движения, включающий в себя множество наборов, имеющих два элемента из целевой позиции p и целевой скорости v в целевой позиции в системе координат, фиксированной для транспортного средства V, т.е. множество конфигурационных координат (p, v). Каждая из множества целевых позиций p имеет, по меньшей мере, позиции координаты X или координаты Y в системе координат, фиксированной для транспортного средства V, или информацию, эквивалентную им. План движения может включать в себя информацию, показывающую поведение транспортного средства V, и не ограничен планом, включающим в себя конфигурационные координаты. Например, план движения может включать в себя целевое время t вместо целевой скорости v в качестве информации, показывающей поведение транспортного средства V. Помимо этого, план движения может включать в себя информацию, связанную с целевым временем t и ориентацией транспортного средства V в этот момент.
[0041] В общем, план движения является достаточным в той мере, в какой план движения представляет собой данные, показывающие план, охватывающий приблизительно несколько секунд в будущем от текущего времени. Тем не менее, данные, показывающие план на десятки секунд вперед, могут требоваться в зависимости от ситуаций, таких как правый поворот на пересечении и обгон посредством транспортного средства V. С учетом такого случая, число конфигурационных координат плана движения может быть переменным, и расстояние между конфигурационными координатами также может быть переменным. Помимо этого, кривая, которая соединяет смежные конфигурационные координаты между собой, может быть аппроксимирована посредством использования сплайн-функции и т.п., и параметр аппроксимированной кривой может использоваться в качестве плана движения. Любой известный способ может приспосабливаться в качестве способа формирования плана движения в той мере, в какой может выражаться поведение транспортного средства V.
[0042] План движения включает в себя, например, значение управления, которое служит в качестве цели, когда система 100 транспортного средства управляет транспортным средством. Например, план движения может представлять собой данные, показывающие ход изменения скорости транспортного средства, ускорения/замедления, крутящего момента поворота при рулении и т.п. транспортного средства V во время движения транспортного средства V по курсу вдоль целевого маршрута. Другими словами, план движения может включать в себя шаблон скорости, шаблон ускорения/замедления и шаблон крутящего момента транспортного средства V. Альтернативно, план движения может представлять собой данные, показывающие ход изменения целевого значения управления нажатием педали акселератора и целевого значения управления нажатием педали тормоза вместо шаблона скорости и шаблона ускорения/замедления транспортного средства V. Модуль 14 формирования плана движения может формировать план движения для минимизации времени движения (периода времени, требуемого для транспортного средства V, чтобы достигать пункта назначения).
[0043] Шаблон скорости представляет собой, например, данные, включающие в себя целевую скорость транспортного средства, заданную в ассоциации со временем для каждой целевой позиции управления относительно целевых позиций управления, заданных с предварительно определенными интервалами (например, 1 м) в ходе курса. Шаблон ускорения/замедления представляет собой, например, данные, включающие в себя целевое ускорение/замедление, заданное в ассоциации со временем для каждой целевой позиции управления относительно целевых позиций управления, заданных с предварительно определенными интервалами (например, 1 м) в ходе курса. Шаблон руления представляет собой, например, данные, включающие в себя целевой крутящий момент поворота при рулении, заданный в ассоциации со временем для каждой целевой позиции управления относительно целевых позиций управления, заданных с предварительно определенными интервалами (например, 1 м) в ходе курса. Данные, показывающие ход изменения целевого значения управления нажатием педали акселератора и целевого значения управления нажатием педали тормоза, представляют собой, например, данные, включающие в себя позицию педали, заданную в ассоциации со временем для каждой целевой позиции управления относительно целевых позиций управления, заданных с предварительно определенными интервалами (например, 1 м) в ходе курса.
[0044] Модуль 14 формирования плана движения формирует план движения в случае, если, например, информация, показывающая инициирование автономного вождения, получается из переключателя 70 для включения/выключения автономного вождения. Помимо этого, модуль 14 формирования плана движения выводит сформированный план движения в модуль 15 получения информации операций вождения и модуль 17 управления движением. В случае, если модуль 15 получения информации операций вождения не должен использовать план движения, примеры чего включают в себя случай, в котором состояние операции вождения может получаться посредством использования только значения, обнаруженного посредством внутреннего датчика 3 (описан ниже), модуль 14 формирования плана движения может не выводить план движения в модуль 15 получения информации операций вождения.
[0045] Модуль 15 получения информации операций вождения получает информацию операций вождения, которая представляет собой информацию, коррелированную с операцией вождения водителя, на основе результата обнаружения внутреннего датчика 3. Например, модуль 15 получения информации операций вождения получает рабочую величину операции вождения водителя, связанную, по меньшей мере, с одним из операции руления, операции нажатия педали акселератора и операции нажатия педали тормоза транспортного средства V, в качестве информации операций вождения. Операция руления представляет собой, например, операцию поворота руля, выполняемую водителем. Другими словами, информация операций вождения, связанная с операцией руления, включает в себя рабочую величину поворота руля (крутящий момент или угол поворота при рулении). В случае вращения при рулении в транспортном средстве V в соответствии с целевым значением управления при рулении (целевым крутящим моментом поворота при рулении), включенным в план движения, модуль 15 получения информации операций вождения получает, в качестве рабочей величины операции руления, разность между значением обнаружения состояния вращения при рулении относительно транспортного средства V, которое обнаруживается посредством датчика рулевого управления, и целевым значением управления при рулении, которое включено в план движения, сформированный посредством модуля 14 формирования плана движения. Отклонение от целевого значения управления, возможно, должно обнаруживаться, и тем самым вместо этого может использоваться разность, например, между дифференциальным значением значения обнаружения состояния вращения и дифференциальным значением целевого значения управления. В случае отсутствия вращения при рулении в соответствии с целевым значением управления при рулении, включенным в план движения, модуль 15 получения информации операций вождения получает значение обнаружения состояния вращения при рулении относительно транспортного средства V, обнаруженное посредством датчика рулевого управления, в качестве рабочей величины операции руления. В любом случае, модуль 15 получения информации операций вождения может получать абсолютное значение величины операции водителя. Операция нажатия педали акселератора представляет собой, например, операцию нажатия педали акселератора, которая выполняется водителем. Другими словами, информация операций вождения, связанная с операцией ускорения, включает в себя информацию, коррелированную с рабочей величиной нажатия педали акселератора (величиной нажатия). Операция нажатия педали тормоза представляет собой, например, операцию нажатия педали тормоза, которая выполняется водителем. Другими словами, информация операций вождения, связанная с операцией нажатия педали тормоза, включает в себя информацию, коррелированную с рабочей величиной нажатия педали тормоза (величиной нажатия). В качестве в операции руления, описанной выше, вычисляется разность между определенным значением и целевым значением управления, и абсолютное значение величины операции водителя получается при операции нажатия педали акселератора и операции нажатия педали тормоза в случае, если позиция педали изменяется в соответствии со значением управления системой. Другими словами, модуль 15 получения информации операций вождения получает разность между значением обнаружения позиции педали относительно педали акселератора транспортного средства V и целевым значением управления нажатием педали акселератора, включенным в план движения, в качестве рабочей величины операции нажатия педали акселератора в случае, если позиция педали для педали акселератора транспортного средства V перемещается в соответствии с целевым значением управления нажатием педали акселератора, включенным в план движения. Целевое значение управления нажатием педали акселератора может извлекаться из скорости транспортного средства, ускорения/замедления и т.п. транспортного средства V, включенных в план движения. Аналогично, модуль 15 получения информации операций вождения получает разность между значением обнаружения позиции педали относительно педали тормоза транспортного средства V и целевым значением управления нажатием педали тормоза, включенным в план движения, в качестве рабочей величины операции нажатия педали тормоза в случае, если позиция педали для педали тормоза транспортного средства V перемещается в соответствии с целевым значением управления нажатием педали тормоза, включенным в план движения. Целевое значение управления нажатием педали тормоза может извлекаться из скорости транспортного средства, ускорения/замедления и т.п. транспортного средства V, включенных в план движения. Модуль 15 получения информации операций вождения выводит информацию операций вождения в модуль 16 переключения состояния вождения, модуль 17 управления движением и модуль 18 вывода информации.
[0046] Модуль 16 переключения состояния вождения переключает состояние вождения транспортного средства V на основе информации операций вождения, которая получается посредством модуля 15 получения информации операций вождения. Состояние вождения транспортного средства V включает в себя состояние управления транспортным средством (первое состояние вождения) и состояние вождения вручную (второе состояние вождения). В этом варианте осуществления, состояние управления транспортным средством разделяется на состояние автономного вождения и состояние совместного вождения.
[0047] Фиг. 3 является схемой, показывающей пример взаимосвязи между рабочей величиной и переходом состояния вождения. Горизонтальная ось на фиг. 3 представляет рабочую величину T, а вертикальная ось представляет состояние вождения. Как проиллюстрировано на фиг. 3, в этом варианте осуществления описываются переходы в/из трех состояний вождения из числа состояния автономного вождения, состояния совместного вождения и состояния вождения вручную.
[0048] Состояние автономного вождения представляет собой, например, состояние, в котором движение транспортного средства V управляется посредством использования плана движения. Другими словами, состояние автономного вождения представляет собой, например, состояние, в котором движение транспортного средства V реализовано исключительно на основе управления посредством системы 100 транспортного средства в состоянии, в котором водитель не выполняет операцию вождения, и водитель не вмешивается в движение транспортного средства V.
[0049] Состояние совместного вождения представляет собой, например, состояние вождения, в котором транспортное средство V движется с помощью управления транспортным средством на основе периферийной информации и операции вождения водителя, действующих совместно друг с другом. Другими словами, состояние совместного вождения представляет собой состояние, в котором как водитель, так и система 100 транспортного средства могут быть связаны с движением транспортного средства V, состояние, которое разрешает вмешательство системы, и состояние, в котором движение транспортного средства V реализовано на основе, по меньшей мере, рабочей величины T операции вождения водителя. Состояние совместного вождения включает в себя состояние, в котором выполняется управление помощью при вождении для помощи в операции вождении водителя, в то время как операция вождения водителя служит в качестве основной операции.
[0050] Система помощи для удержания на полосе движения (LKA) является примером управления помощью при вождении. LKA представляет собой управление для управления при рулении транспортного средства таким образом, что транспортное средство не отклоняется от полосы движения. В ходе LKA, операция руления водителя отражается в рулении транспортного средства в диапазоне, в котором, например, транспортное средство не отклоняется от полосы движения. В случае, если транспортное средство с большой вероятностью должно отклоняться от полосы движения из состояния операции руления водителя в ходе выполнения LKA, система 100 транспортного средства осуществляет рулевое управление таким образом, что транспортное средство возвращается в полосу движения. Примеры управления помощью при вождении включают в себя адаптивную систему оптимального регулирования скорости (ACC). ACC представляет собой, например, управление для выполнения управления на постоянной скорости в случае, если впереди идущие транспортные средства не присутствуют перед транспортным средством, так что транспортное средство движется на заданной постоянной скорости, заданной заранее, и выполнения следящего управления в случае, если впереди идущее транспортное средство присутствует перед транспортным средством, так что скорость транспортного средства для транспортного средства регулируется в соответствии с расстоянием между транспортными средствами от впереди идущего транспортного средства. Система 100 транспортного средства замедляет транспортное средство в соответствии с операцией нажатия педали тормоза водителя даже в ходе выполнения ACC. Помимо этого, система 100 транспортного средства может ускорять транспортное средство, в соответствии с операцией нажатия педали акселератора водителя, до максимальной разрешенной скорости, заданной заранее (например, до установленной законом максимальной скорости, применимой на дороге, по которой движется транспортное средство), даже в ходе выполнения ACC.
[0051] Состояние вождения вручную представляет собой состояние, в котором рабочая величина T операции вождения водителя отражается при движении транспортного средства V. Другими словами, состояние вождения вручную представляет собой состояние, в котором рабочая величина T операции вождения водителя отражается при движении транспортного средства V в состоянии, в котором вмешательство системы является невозможным.
[0052] Модуль 16 переключения состояния вождения переключает состояние вождения транспортного средства V на состояние автономного вождения, состояние совместного вождения или состояние вождения вручную на основе рабочей величины T операции вождения водителя, связанной, по меньшей мере, с одним из операции руления, операции нажатия педали акселератора и операции нажатия педали тормоза. В случае, если состояние вождения транспортного средства V представляет собой состояние автономного вождения, и рабочая величина T меньше порогового значения Tk определения вмешательства, состояние автономного вождения поддерживается, несмотря на операцию водителя. Пороговое значение Tk определения вмешательства является значением, которое задается заранее, и является пороговым значением для определения присутствия или отсутствия вмешательства в операцию водителя. В первом варианте осуществления, пороговое значение Tk определения вмешательства является пороговым значением (вторым пороговым значением), которое используется для определения переключения из состояния автономного вождения в состояние совместного вождения. Пороговое значение Tk определения вмешательства задается равным надлежащему значению относительно операции руления, операции нажатия педали акселератора и операции нажатия педали тормоза и с учетом типа каждой операции. В случае, если состояние вождения транспортного средства V представляет собой состояние автономного вождения, и рабочая величина T равна или выше порогового значения Tk определения вмешательства и меньше порогового значения Th инициирования вождения вручную, состояние вождения транспортного средства V становится состоянием совместного вождения. Пороговое значение Th инициирования вождения вручную является значением, которое задается заранее, и является пороговым значением (первым пороговым значением) для определения переключения из состояния совместного вождения (или состояния автономного вождения) в состояние вождения вручную. Пороговое значение Th инициирования вождения вручную задается равным надлежащему значению относительно операции руления, операции нажатия педали акселератора и операции нажатия педали тормоза и с учетом типа каждой операции. В случае, если состояние вождения транспортного средства V представляет собой состояние автономного вождения или состояние совместного вождения, и рабочая величина T равна или выше порогового значения Th инициирования вождения вручную, состояние вождения транспортного средства V становится состоянием вождения вручную.
[0053] В дальнейшем в этом документе описывается определение (поддержание или переход) состояния вождения транспортного средства V. Сначала описывается поддержание или переход состояния автономного вождения. В случае, если состояние вождения транспортного средства V представляет собой состояние автономного вождения, и рабочая величина T меньше порогового значения Tk определения вмешательства, модуль 16 переключения состояния вождения поддерживает состояние вождения транспортного средства V в состоянии автономного вождения. Затем состояние автономного вождения не отменено даже в случае, если обнаруживается операция руления без намерения отменять автономное вождение, примеры чего включают в себя случай, в котором водитель непреднамеренно касается руля. Соответственно, модуль 16 переключения состояния вождения может не допускать операции водителем с переключателем 70 для включения/выключения автономного вождения для инициирования автономного вождения при каждой отмене автономного вождения без намерения водителя, и за счет этого может уменьшаться неудобство водителя.
[0054] В случае, если состояние вождения транспортного средства V представляет собой состояние автономного вождения, и рабочая величина T становится равной или превышающей пороговое значение Tk определения вмешательства и меньшей порогового значения Th инициирования вождения вручную, модуль 16 переключения состояния вождения переключает состояние вождения на состояние совместного вождения. Затем состояние вождения транспортного средства V подвергается переходу из состояния автономного вождения в состояние совместного вождения в случае, если, например, водитель поворачивает руль на рабочую величину T, равную или большую порогового значения Tk определения вмешательства и меньшую порогового значения Th инициирования вождения вручную, так что он вмешивается в управление транспортным средством в состоянии автономного вождения. Состояние вождения транспортного средства V переключается на состояние совместного вождения посредством модуля 16 переключения состояния вождения в случае, если, например, крупное встречное транспортное средство появляется во время движения в состоянии автономного вождения, и водитель выполняет операцию вождения для временного движения в позиции, немного отстоящей от крупного транспортного средства. В этом случае, транспортное средство V движется на основе рабочей величины T операции водителя в состоянии, в котором разрешено вмешательство системы, и в силу этого система 100 транспортного средства может разрешать транспортному средству V двигаться в позиции на основе операции вождения водителя.
[0055] Модуль 16 переключения состояния вождения может переключать состояние вождения транспортного средства V на состояние вождения вручную в случае, если состояние вождения транспортного средства V представляет собой состояние автономного вождения, и рабочая величина T становится равной или превышающей пороговое значение Th инициирования вождения вручную. Другими словами, состояние вождения транспортного средства V может подвергаться прямому переходу из состояния автономного вождения в состояние вождения вручную не через состояние совместного вождения.
[0056] В дальнейшем в этом документе описывается поддержание или переход состояния совместного вождения. Модуль 16 переключения состояния вождения переключает состояние вождения транспортного средства V из состояния совместного вождения в состояние автономного вождения в случае, если состояние вождения транспортного средства V представляет собой состояние совместного вождения, и рабочая величина T становится меньше порогового значения Tk определения вмешательства. Затем состояние вождения переключается из состояния совместного вождения в состояние автономного вождения посредством модуля 16 переключения состояния вождения, когда, например, водитель выполняет операцию вождения таким образом, что транспортное средство движется в позиции, немного отстоящей от крупного встречного транспортного средства, и водитель прекращает операцию вождения после того, как транспортное средство и встречное транспортное средство проезжают мимо друг друга. Поскольку состояние вождения автоматически переключается на состояние автономного вождения на основе рабочей величины T в случае, если вмешательство в операцию является временным, как описано выше, модуль 16 переключения состояния вождения может не допускать операции водителем с переключателем 70 для включения/выключения автономного вождения для инициирования автономного вождения при каждой временной отмене автономного вождения, и за счет этого может уменьшаться неудобство водителя.
[0057] Модуль 16 переключения состояния вождения поддерживает состояние совместного вождения в случае, если состояние вождения транспортного средства V представляет собой состояние совместного вождения, и рабочая величина T остается равной или превышающей пороговое значение Tk определения вмешательства и меньшей порогового значения Th инициирования вождения вручную. Модуль 16 переключения состояния вождения переключает состояние вождения транспортного средства V из состояния совместного вождения в состояние вождения вручную в случае, если состояние вождения транспортного средства V представляет собой состояние совместного вождения, и крутящий момент, коррелированный с операцией руления, становится равным или превышающим пороговое значение Th инициирования вождения вручную. Затем рабочая величина T операции вождения водителя отражается при движении транспортного средства V в состоянии, в котором вмешательство системы является невозможным.
[0058] В дальнейшем в этом документе описывается поддержание или переход состояния вождения вручную. В случае, если, например, состояние вождения транспортного средства V представляет собой состояние вождения вручную, модуль 16 переключения состояния вождения поддерживает состояние вождения транспортного средства V в состоянии вождения вручную, даже когда рабочая величина T становится меньше порогового значения Th инициирования вождения вручную. Когда водитель выполняет операцию вождения при достаточной рабочей величине T с намерением обеспечивать возможность продолжения состояния вождения вручную в этом случае, последующее переключение в состояние автономного вождения или состояние совместного вождения ограничено, и в силу этого может не допускаться операция водителем с переключателем 70 для включения/выключения автономного вождения для завершения автономного вождения. Соответственно, может уменьшаться неудобство водителя.
[0059] В случае, если состояние вождения транспортного средства V представляет собой состояние вождения вручную, модуль 16 переключения состояния вождения поддерживает состояние вождения вручную до тех пор, пока операция запроса на инициирование автономного вождения не будет введена в переключатель 70 для включения/выключения автономного вождения. Другими словами, переход в состояние совместного вождения или состояние автономного вождения ограничен даже в случае, если рабочая величина T становится меньше порогового значения Th инициирования вождения вручную до тех пор, пока операция запроса на инициирование автономного вождения не будет введена. Период, в течение которого поддерживается состояние вождения вручную, не ограничен тем, что описывается выше, и модуль 16 переключения состояния вождения может поддерживать состояние вождения вручную, например, в течение периода, определенного заранее. Помимо этого, известные средства ввода, отличные от переключателя 70 для включения/выключения автономного вождения, могут использоваться для ввода операции запроса на инициирование автономного вождения.
[0060] Как описано выше со ссылкой на фиг. 3, переход между состоянием автономного вождения и состоянием совместного вождения определяется на основе сравнения между пороговым значением Tk определения вмешательства и рабочей величиной T на основе операции вождения и представляет собой обратимый переход, как указано посредством стрелки на фиг. 3. Переход между состоянием совместного вождения и состоянием вождения вручную, напротив, представляет собой необратимый переход, при котором разрешается только переход из состояния совместного вождения в состояние вождения вручную, как указано посредством стрелки на фиг. 3, хотя переход между состоянием совместного вождения и состоянием вождения вручную определяется на основе сравнения между пороговым значением Th инициирования вождения вручную и рабочей величиной T на основе операции вождения. Модуль 16 переключения состояния вождения выводит информацию, связанную с состоянием вождения, в модуль 17 управления движением.
[0061] В случае, если состояние вождения транспортного средства V может переключаться на основе рабочих величин T, по меньшей мере, двух из операции руления, операции нажатия педали акселератора и операции нажатия педали тормоза, система 100 транспортного средства может отдавать приоритет поддержанию высокоприоритетного состояния вождения или переключению на высокоприоритетное состояние вождения. Например, система 100 транспортного средства может размещать состояние совместного вождения перед состоянием автономного вождения и может размещать состояние вождения вручную перед состоянием совместного вождения. В частности, система 100 транспортного средства может переключать состояние вождения транспортного средства V в состояние совместного вождения, даже когда рабочие величины T любых двух из операции руления, операции нажатия педали акселератора и операции нажатия педали тормоза меньше порогового значения Tk определения вмешательства, в случае, если, например, состояние вождения транспортного средства V представляет собой состояние автономного вождения, и рабочая величина T другой становится равной или превышающей пороговое значение Tk определения вмешательства и меньшей порогового значения Th инициирования вождения вручную. Помимо этого, система 100 транспортного средства может поддерживать состояние совместного вождения, даже когда рабочие величины T любых двух из операции руления, операции нажатия педали акселератора и операции нажатия педали тормоза уменьшаются, так что они становятся меньше порогового значения Tk определения вмешательства, в случае, если, например, состояние вождения транспортного средства V представляет собой состояние совместного вождения, и рабочая величина T другой равна или выше порогового значения Tk определения вмешательства и меньше порогового значения Th инициирования вождения вручную. Система 100 транспортного средства может переключать состояние вождения транспортного средства V в состояние вождения вручную, даже когда рабочие величины T любых двух из операции руления, операции нажатия педали акселератора и операции нажатия педали тормоза равны или выше порогового значения Tk определения вмешательства и меньше порогового значения Th инициирования вождения вручную, в случае, если, например, состояние вождения транспортного средства V представляет собой состояние совместного вождения, и рабочая величина T другой равна или выше порогового значения Th инициирования вождения вручную.
[0062] Модуль 17 управления движением разрешает транспортному средству V двигаться в состоянии вождения, которое определяется посредством модуля 16 переключения состояния вождения. Когда состояние вождения транспортного средства V представляет собой состояние автономного вождения, модуль 17 управления движением выводит управляющий сигнал в актуатор 6 и управляет движением транспортного средства V на основе плана движения, который формируется посредством модуля 14 формирования плана движения. Когда состояние вождения транспортного средства V представляет собой состояние совместного вождения, модуль 17 управления движением выводит управляющий сигнал в актуатор 6 и действует совместно с операцией вождения для движения транспортного средства V на основе плана движения, который формируется посредством модуля 14 формирования плана движения, и рабочей величины T, которая получается посредством модуля 15 получения информации операций вождения. Когда состояние вождения транспортного средства V представляет собой состояние вождения вручную, модуль 17 управления движением выводит управляющий сигнал на основе рабочей величины T, которая получается посредством модуля 15 получения информации операций вождения, в актуатор 6 и отражает рабочую величину T операции вождения при движении транспортного средства V. Таким образом, модуль 17 управления движением реализует три состояния из числа состояния автономного вождения, состояния совместного вождения и состояния вождения вручную.
[0063] Модуль 18 вывода информации передает информацию относительно транспортного средства V и информацию относительно периферийной ситуации относительно транспортного средства V пассажиру, например, посредством передачи управляющего сигнала в HMI 7 (модуль 7a отображения и модуль 7b аудиовывода). Модуль 18 вывода информации отображает состояние рабочей величины T относительно порогового значения Tk определения вмешательства и/или порогового значения Th инициирования вождения вручную посредством передачи управляющего сигнала в модуль 7a отображения. Модуль 18 вывода информации отображает состояние рабочей величины T относительно порогового значения Tk определения вмешательства и/или порогового значения Th инициирования вождения вручную.
[0064] Модуль 18 вывода информации отображает состояние рабочей величины T относительно порогового значения Tk определения вмешательства и порогового значения Th инициирования вождения вручную в случае, если, например, состояние вождения транспортного средства представляет собой состояние автономного вождения или состояние совместного вождения, и операция, которая используется для переключения состояния вождения из числа операции руления, операция нажатия педали акселератора и операция нажатия педали тормоза, выполняется водителем. Другими словами, модуль 18 вывода информации может не отображать состояние рабочей величины T относительно порогового значения Tk определения вмешательства и порогового значения Th инициирования вождения вручную в случае, если состояние вождения транспортного средства представляет собой состояние вождения вручную. Когда переключатель 70 для включения/выключения автономного вождения включен, и рабочая величина T равна или выше порогового значения Th инициирования вождения вручную, модуль 18 вывода информации может отображать состояние рабочей величины T относительно порогового значения Tk определения вмешательства и порогового значения Th инициирования вождения вручную даже в случае, если состояние вождения транспортного средства представляет собой состояние вождения вручную. После этого водитель может распознавать то, что состояние вождения транспортного средства не переключается из состояния вождения вручную в состояние автономного вождения, хотя переключатель 70 для включения/выключения автономного вождения включен, поскольку рабочая величина T равна или выше порогового значения Th инициирования вождения вручную. Помимо этого, водитель может распознавать то, насколько снижать рабочую величину T, с тем чтобы переключать состояние вождения транспортного средства из состояния вождения вручную в состояние автономного вождения или состояние совместного вождения. Помимо этого, модуль 18 вывода информации может уведомлять водителя, посредством аудиовывода или вывода предупреждения, в отношении того, что состояние вождения транспортного средства не переключается на состояние автономного вождения вследствие большой рабочей величины в случае, если рабочая величина T равна или выше порогового значения Th инициирования вождения вручную, и переключатель 70 для включения/выключения автономного вождения включен. Система 100 транспортного средства может переключать состояние вождения транспортного средства в состояние автономного вождения независимо от текущей рабочей величины T в случае, если переключатель 70 для включения/выключения автономного вождения включается.
[0065] Модуль 18 вывода информации может отображать состояние рабочей величины T относительно порогового значения Tk определения вмешательства и/или порогового значения Th инициирования вождения вручную всегда независимо от состояния вождения. Модуль 18 вывода информации может отображать только рабочую величину T операции, в которой участвует водитель, из числа операции руления, операции нажатия педали акселератора и операции нажатия педали тормоза.
[0066] В дальнейшем в этом документе описываются примеры отображения состояния рабочей величины T относительно порогового значения Tk определения вмешательства и порогового значения Th инициирования вождения вручную со ссылкой на фиг. 4A-4D. Примеры отображения в качестве строк индикаторов проиллюстрированы на фиг. 4A-4D. Примеры отображения на фиг. 4A-4D могут приспосабливаться относительно любой из операции руления, операции нажатия педали акселератора и операции нажатия педали тормоза.
[0067] Фиг. 4A является схемой, иллюстрирующей пример отображения строки индикаторов, связанной со случаем, в котором пороговое значение Tk определения вмешательства и пороговое значение Th инициирования вождения вручную являются фиксированными. В строке индикаторов, которая проиллюстрирована на фиг. 4A, только рабочая величина T операции водителя варьируется. Согласно строке индикаторов, которая проиллюстрирована на фиг. 4A, состояние вождения транспортного средства переключается из состояния автономного вождения в состояние совместного вождения, когда рабочая величина T превышает пороговое значение Tk определения вмешательства. Согласно строке индикаторов, которая проиллюстрирована на фиг. 4A, состояние вождения транспортного средства переключается из состояния совместного вождения в состояние вождения вручную, когда рабочая величина T превышает пороговое значение Th инициирования вождения вручную. В случае, если, по меньшей мере, две из рабочей величины T операции руления, рабочей величины T операции нажатия педали акселератора и рабочей величины T операции нажатия педали тормоза используются для переключения состояния вождения, модуль 18 вывода информации может отображать две или более строк индикаторов, коррелированных с соответствующими рабочими величинами T. На фиг. 4A, пороговое значение Th инициирования вождения вручную не обязательно должно быть в правом конце (максимальное значение) строки индикаторов.
[0068] Фиг. 4B является схемой, иллюстрирующей пример строки индикаторов, связанной со случаем, в котором пороговое значение Tk определения вмешательства и пороговое значение Th инициирования вождения вручную варьируются. Другими словами, пороговое значение Tk определения вмешательства и пороговое значение Th инициирования вождения вручную могут варьироваться. Помимо этого, любое одно из порогового значения Tk определения вмешательства и порогового значения Th инициирования вождения вручную может варьироваться, в то время как другое не варьируется. В строке индикаторов, которая проиллюстрирована на фиг. 4B, позиции порогового значения Tk определения вмешательства и порогового значения Th инициирования вождения вручную, а также рабочей величины T варьируются.
[0069] Система 100 транспортного средства не должна допускать переключение состояния вождения транспортного средства на/из трех состояний вождения из числа состояния автономного вождения, состояния совместного вождения и состояния вождения вручную. Другими словами, состояние управления транспортным средством не ограничено случаем, в котором включаются как состояние автономного вождения, так и состояние совместного вождения, и может включать в себя, по меньшей мере, одно из состояния автономного вождения и состояния совместного вождения. Система 100 транспортного средства может допускать переключение состояния вождения транспортного средства, например, только между двумя состояниями вождения из числа состояния автономного вождения и состояния вождения вручную. В этом случае, состояние управления транспортным средством, описанное выше, соответствует состоянию автономного вождения. В этом случае, модуль 18 вывода информации не должен отображать пороговое значение Tk определения вмешательства и отображает только состояние рабочей величины T относительно порогового значения Th инициирования вождения вручную. Фиг. 4C является схемой, иллюстрирующей пример строки индикаторов, в которой пороговое значение Th инициирования вождения вручную является фиксированным. На фиг. 4C, только рабочая величина T операции водителя варьируется. Согласно строке индикаторов, которая проиллюстрирована на фиг. 4C, состояние вождения транспортного средства переключается из состояния автономного вождения в состояние вождения вручную, когда рабочая величина T превышает пороговое значение Th инициирования вождения вручную. На фиг. 4C, пороговое значение Th инициирования вождения вручную не обязательно должно быть в правом конце (максимальное значение) строки индикаторов. Фиг. 4D является схемой, иллюстрирующей пример строки индикаторов, связанной со случаем, в котором пороговое значение Th инициирования вождения вручную варьируется. Согласно строке индикаторов, которая проиллюстрирована на фиг. 4D, позиция порогового значения Th инициирования вождения вручную, а также рабочей величины T варьируется.
[0070] Система 100 транспортного средства также может представлять собой систему, которая допускает переключение состояния вождения транспортного средства только между двумя состояниями вождения из числа состояния совместного вождения и состояния вождения вручную. В этом случае, состояние управления транспортным средством, описанное выше, соответствует состоянию совместного вождения. Поскольку только одно пороговое значение используется для переключения состояния вождения в этом случае, может приспосабливаться пример отображения, который проиллюстрирован на фиг. 4C или фиг. 4D. Даже в случае, если состояние вождения транспортного средства может переключаться на/из трех состояний вождения из числа состояния автономного вождения, состояния совместного вождения и состояния вождения вручную, система 100 транспортного средства может отображать только состояние рабочей величины T относительно порогового значения Th инициирования вождения вручную, как проиллюстрировано на фиг. 4C или фиг. 4D, без отображения порогового значения Tk определения вмешательства.
[0071] Даже когда система 100 транспортного средства представляет собой систему, которая допускает переключение состояния вождения транспортного средства в/из трех состояний вождения, система 100 транспортного средства может отображать только пороговое значение Th инициирования вождения вручную и скрывать отображение порогового значения Tk определения вмешательства, с тем чтобы упрощать визуализацию отображения, когда рабочая величина T равна пороговому значению Tk определения вмешательства в строке индикаторов, которая проиллюстрирована на фиг. 4A или фиг. 4B. В случае, если система 100 транспортного средства представляет собой систему, которая допускает переключение состояния вождения транспортного средства в/из трех состояний вождения, и рабочая величина T превышает пороговое значение Th инициирования вождения вручную в строке индикаторов, которая проиллюстрирована на фиг. 4A или фиг. 4B, система 100 транспортного средства может отображать только пороговое значение Th инициирования вождения вручную и скрывать отображение порогового значения Tk определения вмешательства, с тем чтобы упрощать визуализацию отображения.
[0072] Система 100 транспортного средства также может представлять собой систему, которая допускает переключение состояния вождения транспортного средства на четыре или более состояний вождения в соответствии с рабочей величиной T операции водителя. В этом случае, модуль 18 вывода информации отображать, например, состояние рабочей величины T относительно трех или более пороговых значений.
[0073] В дальнейшем в этом документе описываются примеры отображения относительно рабочей величины операции руления со ссылкой на фиг. 5. Фиг. 5 является схемой, иллюстрирующей примеры отображения относительно состояния рабочей величины операции руления относительно порогового значения Tk определения вмешательства и порогового значения Th инициирования вождения вручную. Фиг. 5 показывает первый-пятый примеры отображения, связанные со случаем, в котором руль ST находится в исходной позиции (начальной позиции), и со случаем, в котором руль ST находится в позиции вращения после вращения против часовой стрелки. В случае, если руль ST находится в исходной позиции, пороговое значение Tk определения вмешательства и/или пороговое значение Th инициирования вождения вручную может отображаться, или ни одно из порогового значения Tk определения вмешательства и порогового значения Th инициирования вождения вручную не может отображаться. В случае, если руль ST находится в исходной позиции, и пороговое значение Tk определения вмешательства и/или пороговое значение Th инициирования вождения вручную отображаются, оба из них для вращения против часовой стрелки и вращения по часовой стрелке могут отображаться.
[0074] В случае, если руль ST вращается в соответствии с направлением транспортного средства V в состоянии автономного вождения, исходная позиция руля ST может представлять собой позицию целевого значения управления при рулении (угла поворота при рулении) согласно плану движения для транспортного средства V в состоянии автономного вождения. В этом случае, система 100 транспортного средства отображает, например, разность между значением обнаружения состояния вращения при рулении относительно транспортного средства V, которое обнаруживается посредством датчика рулевого управления, и целевым значением управления при рулении, которое включено в план движения, который формируется посредством модуля 14 формирования плана движения, в качестве рабочей величины операции руления.
[0075] Первый пример отображения является примером, связанным со случаем, в котором руль ST проиллюстрирован в абстрактном представлении. В первом примере отображения, планка Ha в центре руля согласно абстрактному представлению вращается в соответствии с углом поворота руля ST. Другими словами, угол поворота планки Ha коррелирован с рабочей величиной операции руления. В первом примере отображения, состояние вождения транспортного средства переключается из состояния автономного вождения в состояние совместного вождения, когда планка Ha вращается сверх порогового значения Tk определения вмешательства. Аналогично, состояние вождения транспортного средства переключается из состояния совместного вождения в состояние вождения вручную, когда планка Ha вращается сверх порогового значения Th инициирования вождения вручную.
[0076] Пороговое значение Tk определения вмешательства и пороговое значение Th инициирования вождения вручную, связанные со случаем вращения против часовой стрелки, проиллюстрированы в данном документе в качестве первого примера отображения относительно вращения руля ST. Тем не менее, в случае вращения по часовой стрелке, пороговое значение Tk определения вмешательства и пороговое значение Th инициирования вождения вручную для вращения против часовой стрелки скрываются, а пороговое значение Tk определения вмешательства и пороговое значение Th инициирования вождения вручную для вращения по часовой стрелке отображаются. Помимо этого, планка Ha может вращаться в соответствии с направлением транспортного средства V в состоянии автономного вождения в случае, если руль ST вращается в соответствии с направлением транспортного средства V в состоянии автономного вождения. В этом случае, отображение порогового значения Tk определения вмешательства и порогового значения Th инициирования вождения вручную также вращается в соответствии с направлением транспортного средства V в состоянии автономного вождения. Когда операция руления водителя выполняется в этом случае, только планка Ha вращается в соответствии с рабочей величиной операции руления. В этом отношении, первый пример отображения является идентичным второму примеру отображения (описан ниже).
[0077] Как и в случае с первым примером отображения, второй пример отображения является примером, связанным со случаем, в котором руль ST проиллюстрирован в абстрактном представлении. Во втором примере отображения, пороговое значение Tk определения вмешательства и пороговое значение Th инициирования вождения вручную из первого примера отображения иллюстрируются по областям. Другими словами, текущая планка Ha и области вплоть до порогового значения Tk определения вмешательства или порогового значения Th инициирования вождения вручную проиллюстрированы посредством использования цвета, отличающегося от цвета фона.
[0078] Третий пример отображения является примером, связанным со случаем, в котором рабочая величина поворота руля ST проиллюстрирована посредством использования измерительного прибора. В третьем примере отображения, наклон приборной планки Hb соответствует рабочей величине операции руления водителя. В третьем примере отображения, приборная планка Hb указывает непосредственно выше в случае, если руль ST находится в исходной позиции, и приборная планка Hb наклоняется вправо или влево в соответствии с вращением руля ST. Например, пороговое значение Tk определения вмешательства и пороговое значение Th инициирования вождения вручную для вращения против часовой стрелки и пороговое значение Tk определения вмешательства и пороговое значение Th инициирования вождения вручную для вращения по часовой стрелке показаны в третьем примере отображения. Приборная планка Hb может наклоняться вправо или влево в соответствии с направлением транспортного средства V в состоянии автономного вождения в случае, если руль ST вращается в соответствии с направлением транспортного средства V в состоянии автономного вождения. В этом случае, отображение порогового значения Tk определения вмешательства и порогового значения Th инициирования вождения вручную также вращается в соответствии с направлением транспортного средства V в состоянии автономного вождения. Когда операция руления водителя выполняется в этом случае, только приборная планка Hb наклоняется вправо или влево в соответствии с рабочей величиной операции руления.
[0079] Четвертый пример отображения является примером, связанным со случаем, в котором рабочая величина поворота руля ST проиллюстрирована посредством использования направляющей планки. В четвертом примере отображения, позиция планки Hc соответствует рабочей величине операции руления водителя. В четвертом примере отображения, планка Hc позиционируется в центре в случае, если руль ST находится в исходной позиции, и планка Hc плавно перемещается вправо или влево в соответствии с направлением, в котором вращается руль ST. Например, пороговое значение Tk определения вмешательства и пороговое значение Th инициирования вождения вручную для вращения против часовой стрелки и пороговое значение Tk определения вмешательства и пороговое значение Th инициирования вождения вручную для вращения по часовой стрелке показаны в четвертом примере отображения. Планка Hc может плавно перемещаться вправо или влево в соответствии с направлением транспортного средства V в состоянии автономного вождения в случае, если руль ST вращается в соответствии с направлением транспортного средства V в состоянии автономного вождения. В этом случае, позиции отображения порогового значения Tk определения вмешательства и порогового значения Th инициирования вождения вручную также перемещаются вправо или влево в соответствии с направлением транспортного средства V в состоянии автономного вождения. Когда операция руления водителя выполняется в этом случае, только планка Hc плавно перемещается в соответствии с рабочей величиной операции руления.
[0080] Пятый пример отображения является примером, связанным со случаем, в котором рабочая величина поворота руля ST проиллюстрирована посредством использования числовых значений. В пятом примере отображения, рабочая величина поворота руля ST (к примеру, угол поворота при рулении) показана в форме числовых значений. В пятом примере отображения, пороговое значение Tk определения вмешательства и пороговое значение Th инициирования вождения вручную для вращения против часовой стрелки отображаются в качестве числовых значений в случае, если, например, руль ST вращается против часовой стрелки. Аналогично, в пятом примере отображения, пороговое значение Tk определения вмешательства и пороговое значение Th инициирования вождения вручную для вращения по часовой стрелке отображаются в качестве числовых значений в случае, если, например, руль ST вращается по часовой стрелке. Числовое значение угла поворота при рулении может варьироваться в соответствии с направлением транспортного средства V в состоянии автономного вождения в случае, если руль ST вращается в соответствии с направлением транспортного средства V в состоянии автономного вождения. В этом случае, числовые значения из числа порогового значения Tk определения вмешательства и порогового значения Th инициирования вождения вручную также варьируются в соответствии с направлением транспортного средства V в состоянии автономного вождения. Когда операция руления водителя выполняется в этом случае, только планка Hc плавно перемещается в соответствии с рабочей величиной операции руления.
[0081] Руль ST также может быть реалистично представлен (например, представлен в форме состояния руля, проиллюстрированного на фиг. 5), и цвет или яркость могут изменяться по мере того, как рабочая величина приближается к пороговому значению Tk определения вмешательства или пороговому значению Th инициирования вождения вручную. Помимо этого, руль ST может быть реалистично представлен, и руль ST в состоянии, в котором рабочая величина достигает порогового значения Tk определения вмешательства, и руль ST в состоянии, в котором рабочая величина достигает порогового значения Th инициирования вождения вручную, могут отображаться на фоне отображения текущего руля ST. Помимо этого, пороговое значение Tk определения вмешательства и/или пороговое значение Th инициирования вождения вручную может перемещаться, как показано на фиг. 4B и фиг. 4D, в первом-пятом примерах отображения.
[0082] В первом-пятом примерах отображения, отображаются как пороговое значение Tk определения вмешательства, так и пороговое значение Th инициирования вождения вручную. Тем не менее, только одно из порогового значения Tk определения вмешательства и порогового значения Th инициирования вождения вручную может отображаться вместо этого. Например, только пороговое значение Tk определения вмешательства может отображаться, в то время как пороговое значение Th инициирования вождения вручную не отображается до тех пор, пока рабочая величина T не достигнет порогового значения Tk определения вмешательства. Помимо этого, только пороговое значение Th инициирования вождения вручную может отображаться, в то время как пороговое значение Tk определения вмешательства не отображается в случае, если рабочая величина T превышает пороговое значение Th инициирования вождения вручную.
[0083] В первом-пятом примерах отображения, одно из порогового значения Tk определения вмешательства и порогового значения Th инициирования вождения вручную может не отображаться, в то время как другое из них выделяется. Например, пороговое значение Tk определения вмешательства может выделяться с помощью увеличения яркости или изменения цвета, при том, что отображение порогового значения Th инициирования вождения вручную не изменяется до тех пор, пока рабочая величина T не достигнет порогового значения Tk определения вмешательства. Аналогично, в первом-пятом примерах отображения, отображение порогового значения Th инициирования вождения вручную может выделяться с помощью увеличения яркости или изменения цвета, при том, что отображение порогового значения Tk определения вмешательства не изменяется в случае, если рабочая величина T превышает пороговое значение Th инициирования вождения вручную. Помимо этого, одно из порогового значения Tk определения вмешательства и порогового значения Th инициирования вождения вручную может выделяться, при том что другое из них отображается.
[0084] В дальнейшем в этом документе описываются другие примеры отображения относительно рабочей величины операции нажатия педали акселератора и рабочей величины операции нажатия педали тормоза со ссылкой на фиг. 6. Фиг. 6 является схемой, иллюстрирующей примеры A-E отображения относительно состояний рабочей величины операции нажатия педали акселератора и рабочей величины операции нажатия педали тормоза относительно порогового значения Tk определения вмешательства и порогового значения Th инициирования вождения вручную. В случае, если педаль акселератора и педаль тормоза находятся в исходных позициях (начальных позициях), пороговое значение Tk определения вмешательства и/или пороговое значение Th инициирования вождения вручную может отображаться, или ни одно из порогового значения Tk определения вмешательства и порогового значения Th инициирования вождения вручную не может отображаться.
[0085] Пример A отображения является схемой, иллюстрирующей пример, в котором рабочая величина операции нажатия педали тормоза и рабочая величина операции нажатия педали акселератора показаны посредством использования гистограмм. В примере A отображения, столбик Ba представляет рабочую величину операции нажатия педали тормоза, а столбик Aa представляет рабочую величину операции нажатия педали акселератора. В примере A отображения, столбик Ba идет вверх по мере того, как возрастает рабочая величина операции нажатия педали тормоза, а столбик Aa идет вверх по мере того, как возрастает рабочая величина операции нажатия педали акселератора. В случае, если состояние вождения транспортного средства V представляет собой состояние автономного вождения, система 100 транспортного средства переключает состояние вождения транспортного средства V в состояние совместного вождения, когда столбик Ba, представляющий рабочую величину операции нажатия педали тормоза, или столбик Aa, представляющий рабочую величину операции нажатия педали акселератора, становится равным или превышающим пороговое значение Tk определения вмешательства. В случае, если состояние вождения транспортного средства V представляет собой состояние совместного вождения, система 100 транспортного средства переключает состояние вождения транспортного средства V в состояние вождения вручную, когда столбик Ba, представляющий рабочую величину операции нажатия педали тормоза, или столбик Aa, представляющий рабочую величину операции нажатия педали акселератора, становится равным или превышающим пороговое значение Th инициирования вождения вручную.
[0086] Модуль 18 вывода информации может выполнять отображение для постепенного снижения рабочей величины вместо немедленного снижения рабочей величины до нуля, даже когда водитель снимает ногу с педали тормоза или педали акселератора. В этом случае, как столбик Ba, так столбик Aa могут отображаться в примере A отображения, когда, например, водитель перемещает свою ногу с педали акселератора на педаль тормоза.
[0087] Пример B отображения является схемой, иллюстрирующей пример, в котором рабочая величина операции нажатия педали тормоза и рабочая величина операции нажатия педали акселератора показаны посредством использования блочных гистограмм. В примере B отображения, блок Bb представляет рабочую величину операции нажатия педали тормоза, а блок Ab представляет рабочую величину операции нажатия педали акселератора. В примере B отображения, блок Bb нарастает по мере того, как возрастает рабочая величина операции нажатия педали тормоза, а блок Ab нарастает по мере того, как возрастает рабочая величина операции нажатия педали акселератора.
[0088] Пример C отображения является схемой, иллюстрирующей пример, в котором рабочая величина операции нажатия педали тормоза и рабочая величина операции нажатия педали акселератора показаны посредством использования размеров окружностей. В примере C отображения, окружность Bc представляет рабочую величину операции нажатия педали тормоза, а окружность Ac представляет рабочую величину операции нажатия педали акселератора. В примере C отображения, тормоз и акселератор показаны посредством использования различных окружностей. Окружность Bc и окружность Ac также могут иметь различные цвета. В примере C отображения, окружность Bc увеличивается по размеру по мере того, как возрастает рабочая величина операции нажатия педали тормоза, а окружность Ac увеличивается по размеру по мере того, как возрастает рабочая величина операции нажатия педали акселератора. Каждое из порогового значения Tk определения вмешательства и порогового значения Th инициирования вождения вручную показано как окружность, которая имеет постоянный размер.
[0089] Пример D отображения является схемой, иллюстрирующей пример, в котором рабочая величина операции нажатия педали тормоза и рабочая величина операции нажатия педали акселератора показаны посредством использования размеров полуокружностей. В примере D отображения, полуокружность Bd представляет рабочую величину операции нажатия педали тормоза, а полуокружность Ad представляет рабочую величину операции нажатия педали акселератора. В примере D отображения, рабочая величина операции нажатия педали акселератора и рабочая величина операции нажатия педали тормоза могут быть показаны посредством использования одной окружности. Полуокружность Bd и полуокружность Ad также могут иметь различные цвета. В примере D отображения, полуокружность Bd увеличивается по размеру по мере того, как возрастает рабочая величина операции нажатия педали тормоза, а полуокружность Ad увеличивается по размеру по мере того, как возрастает рабочая величина операции нажатия педали акселератора. Каждое из порогового значения Tk определения вмешательства и порогового значения Th инициирования вождения вручную показано как окружность, которая имеет постоянный размер. Пример D отображения показывает как рабочую величину операции нажатия педали акселератора, так и рабочую величину операции нажатия педали тормоза посредством использования общей концентрической окружности (концентрической окружности из окружности Tk и окружности Th). Тем не менее, рабочая величина операции нажатия педали акселератора и рабочая величина операции нажатия педали тормоза также могут отображаться посредством использования отдельных концентрических окружностей и в состоянии, в котором рабочая величина операции нажатия педали акселератора и рабочая величина операции нажатия педали тормоза отделены друг от друга.
[0090] Пример E отображения является схемой, иллюстрирующей пример, в котором рабочая величина операции нажатия педали тормоза и рабочая величина операции нажатия педали акселератора показаны посредством использования круговых диаграмм. В примере E отображения, веерообразная область Be представляет рабочую величину операции нажатия педали тормоза, а веерообразная область Ae представляет рабочую величину операции нажатия педали акселератора. В примере E отображения, рабочая величина операции нажатия педали акселератора и рабочая величина операции нажатия педали тормоза могут быть показаны посредством использования одной окружности. Область Be и область Ae также могут иметь различные цвета. В примере E отображения, отношение области Be к окружности увеличивается по мере того, как возрастает рабочая величина операции нажатия педали тормоза, а отношение области Ae к окружности увеличивается по мере того, как возрастает рабочая величина операции нажатия педали акселератора. Каждое из порогового значения Tk определения вмешательства и порогового значения Th инициирования вождения вручную показано как граничные линии области, которая имеет постоянное отношение к окружности.
[0091] Помимо этого, модуль 18 вывода информации может показывать, на основе цвета или яркости, то, что рабочая величина операции нажатия педали тормоза или рабочая величина операции нажатия педали акселератора приближается к пороговому значению Tk определения вмешательства. Помимо этого, модуль 18 вывода информации может показывать состояние рабочей величины операции нажатия педали тормоза относительно порогового значения Tk определения вмешательства и порогового значения Th инициирования вождения вручную и состояние рабочей величины операции нажатия педали акселератора относительно порогового значения Tk определения вмешательства и порогового значения Th инициирования вождения вручную в форме ползунов на направляющих планках. В этом случае, направляющая планка относительно операции нажатия педали тормоза и направляющая планка относительно операции нажатия педали акселератора могут соединяться между собой таким образом, что они образуют одну ось.
[0092] Как рабочая величина операции нажатия педали акселератора, так и рабочая величина операции нажатия педали тормоза могут отображаться в примере A отображения, в примере B отображения, в примере D отображения и в примере E отображения. Тем не менее, рабочая величина операции нажатия педали акселератора и рабочая величина операции нажатия педали тормоза также могут отображаться отдельно. В случае, если рабочая величина операции нажатия педали акселератора и рабочая величина операции нажатия педали тормоза отображаются отдельно, только рабочая величина одной из операции нажатия педали акселератора и операции нажатия педали тормоза, которая выполняется, может отображаться. Помимо этого, пороговое значение Tk определения вмешательства и пороговое значение Th инициирования вождения вручную могут перемещаться, как показано на фиг. 4B и фиг. 4D, в примерах A-E отображения. Примеры A-E отображения также могут использоваться при отображении рабочей величины операции руления, а также рабочей величины операции нажатия педали акселератора и рабочей величины операции нажатия педали тормоза.
[0093] Выше описано отображение состояния рабочей величины T относительно порогового значения Tk определения вмешательства и порогового значения Th инициирования вождения вручную. Тем не менее, примеры отображения не ограничены тем, что описано выше. Например, модуль 18 вывода информации может изменять размер отображения. В этом случае, отображение может укрупняться, когда рабочая величина T приближается к пороговому значению Tk определения вмешательства или пороговому значению Th инициирования вождения вручную. Помимо этого, модуль 18 вывода информации может трехмерно отображать гистограммы, круговые диаграммы и т.п. примеров A-E отображения.
[0094] В случае, если модуль 7a отображения имеет только одну рамку для отображения (или рабочую область отображения) на экране, на котором отображается рабочая величина T, модуль 18 вывода информации может отображать, в рамке для отображения, рабочую величину операции, в которой участвует водитель, из числа рабочей величины операции руления, рабочей величины операции нажатия педали акселератора и рабочей величины операции нажатия педали тормоза. Модуль 18 вывода информации переключает отображение в рамке для отображения из любого из первого-пятого примеров отображения, проиллюстрированных на фиг. 5, на любой из примеров A-E отображения, проиллюстрированных на фиг. 6, в случае, если, например, водитель прекращает операцию руления и выполняет операцию нажатия педали акселератора (или операцию нажатия педали тормоза). Рабочая величина операции нажатия педали акселератора и рабочая величина операции нажатия педали тормоза также могут одновременно отображаться в идентичной рамке для отображения, как проиллюстрировано в примере A отображения, в примере B отображения, в примере D отображения и в примере E отображения на фиг. 6.
[0095] Модуль 18 вывода информации отдает приоритет одной из рабочей величины операции руления и рабочей величины операции нажатия педали тормоза, которая имеет более высокое отношение рабочей величины к пороговому значению Tk определения вмешательства при выполнении отображения в рамке для отображения в случае, если, например, только одна рамка для отображения предоставляется на экране, на котором отображается рабочая величина T, и водитель одновременно выполняет операцию руления с операцией нажатия педали акселератора (или операцией нажатия педали тормоза). Модуль 18 вывода информации может отдавать приоритет рабочей величине, которая имеет более высокое отношение к пороговому значению Th инициирования вождения вручную, при выполнении отображения в рамке для отображения. В случае, если только одно из рабочей величины операции руления, рабочей величины операции нажатия педали акселератора и рабочей величины операции нажатия педали тормоза превышает пороговое значение Tk определения вмешательства, модуль 18 вывода информации может отдавать приоритет этой рабочей величине при выполнении отображения в рамке для отображения. В случае, если только одно из рабочей величины операции руления, рабочей величины операции нажатия педали акселератора и рабочей величины операции нажатия педали тормоза превышает пороговое значение Th инициирования вождения вручную, модуль 18 вывода информации может отдавать приоритет этой рабочей величине при выполнении отображения в рамке для отображения. Модуль 18 вывода информации может отображать рабочую величину, которая является ближайшей к пороговому значению для переключения текущего состояния вождения, из числа рабочей величины операции руления, рабочей величины операции нажатия педали акселератора и рабочей величины операции нажатия педали тормоза.
[0096] Модуль 18 вывода информации может отображать текущее состояние вождения водителю посредством использования модуля 7a отображения. Фиг. 7A является схемой, показывающей пример взаимосвязи между рабочей величиной T и переходом состояния вождения. Фиг. 7B является схемой, показывающей пример взаимосвязи между включением/выключением уведомлений о текущем состоянии вождения и рабочей величиной T. Согласно фиг. 7B, уведомление о текущем состоянии вождения включается только в случае состояния совместного вождения. Модуль 18 вывода информации отображает состояние совместного вождения (текущее состояние вождения) на модуле 7a отображения в случае, если, например, уведомление о текущем состоянии вождения включено. Как проиллюстрировано на фиг. 7A и 7B, модуль 18 вывода информации может переключать включение/выключение уведомлений о текущем состоянии вождения в соответствии с рабочей величиной T. Помимо этого, модуль 18 вывода информации может отображать состояние автономного вождения или состояние вождения вручную водителю.
[0097] Фиг. 7C является схемой, показывающей пример взаимосвязи между рабочим противодействием и рабочей величиной T. Как проиллюстрировано на фиг. 7A и 7C, система 100 транспортного средства может увеличивать рабочее противодействие в качестве способа уведомлять водителя о состоянии совместного вождения. Рабочее противодействие представляет собой противодействие операции руления, операции нажатия педали тормоза или операции нажатия педали акселератора, связанной с рабочей величиной T относительно водителя. Система 100 транспортного средства задает операцию вождения водителя как менее вероятную для выполнения в случае, если, например, рабочее противодействие увеличивается, чем в случае, если рабочее противодействие не увеличивается (чем в случае стандартного рабочего противодействия). Изменение рабочего противодействия выполняется, когда, например, модуль 17 управления движением выводит управляющий сигнал в актуатор 6. В частности, система 100 транспортного средства изменяет рабочее противодействие операции руления посредством управления вспомогательным электромотором, который управляет крутящим моментом поворота при рулении в системе электроусилителя руля, с помощью управляющего сигнала, выводимого из модуля 17 управления движением.
[0098] В ходе переключения состояния вождения, модуль 18 вывода информации может выполнять уведомление перед миграцией и уведомление после миграции на основе аудиовывода из модуля 7b аудиовывода. Помимо этого, модуль 18 вывода информации может выполнять уведомление перед миграцией и уведомление после миграции на основе отображения на модуле 7a отображения. Уведомление перед миграцией, например, служит для того, чтобы уведомлять водителя в отношении инициирования перехода (миграции) состояния вождения. Уведомление после миграции, например, служит для того, чтобы уведомлять водителя в отношении завершения перехода (миграции) состояния вождения.
[0099] Фиг. 8A является схемой, показывающей пример перехода состояния вождения, обусловленного увеличением рабочей величины T. Как проиллюстрировано на фиг. 8A, система 100 транспортного средства подвергается переходу из состояния из состояния автономного вождения в состояние совместного вождения и из состояния совместного вождения в состояние вождения вручную в результате увеличения рабочей величины T. Модуль 18 вывода информации включает уведомление после миграции в случае, если, например, рабочая величина T увеличивается и достигает порогового значения Tk определения вмешательства. Модуль 18 вывода информации выключает уведомление после миграции через предварительно определенный период времени после инициирования уведомления после миграции.
[0100] Модуль 18 вывода информации может выключать уведомление после миграции в соответствии с увеличением рабочей величины T. Фиг. 8B является схемой, показывающей пример взаимосвязи между увеличением рабочей величины T и включением/выключением уведомлений после миграции. Как проиллюстрировано на фиг. 8A и 8B, модуль 18 вывода информации может выполнять уведомление после миграции относительно состояния совместного вождения до тех пор, пока рабочая величина T не достигнет заданного значения Tk1 после увеличения таким образом, что она достигает порогового значения Tk определения вмешательства. Другими словами, модуль 18 вывода информации может включать уведомление после миграции в случае, если рабочая величина T увеличивается и достигает порогового значения Tk определения вмешательства, и может выключать уведомление после миграции в случае, если рабочая величина T продолжает увеличиваться таким образом, что она достигает заданного значения Tk1. Аналогично, модуль 18 вывода информации может выполнять уведомление после миграции относительно состояния вождения вручную до тех пор, пока рабочая величина T не достигнет заданного значения Th1 после увеличения таким образом, что она достигает порогового значения Th инициирования вождения вручную. Заданное значение Tk1 является любым значением, которое превышает пороговое значение Tk определения вмешательства и меньше порогового значения Th инициирования вождения вручную. Заданное значение Th1 является любым значением, которое превышает пороговое значение Th инициирования вождения вручную.
[0101] Модуль 18 вывода информации включает уведомление перед миграцией в случае, если, например, рабочая величина T увеличивается и достигает заданного значения Th0. Заданное значение Th0 является любым значением, которое меньше порогового значения Th инициирования вождения вручную и превышает пороговое значение Tk определения вмешательства. Модуль 18 вывода информации выключает уведомление перед миграцией через предварительно определенный период времени после инициирования уведомления перед миграцией.
[0102] Модуль 18 вывода информации может выключать уведомление перед миграцией в соответствии с увеличением рабочей величины T. Фиг. 8C является схемой, показывающей пример взаимосвязи между увеличением рабочей величины T и включением/выключением уведомлений перед миграцией. Как проиллюстрировано на фиг. 8C, модуль 18 вывода информации может выполнять уведомление перед миграцией относительно состояния вождения вручную до тех пор, пока рабочая величина T не достигнет порогового значения Th инициирования вождения вручную после увеличения таким образом, что она достигает заданного значения Th0. Оба из уведомления после миграции и уведомления перед миграцией не обязательно должны выполняться совместно, и может выполняться только одно из уведомления после миграции и уведомления перед миграцией. Это применимо как есть к нижеприведенному описанию.
[0103] Фиг. 8D является схемой, показывающей пример взаимосвязи между увеличением рабочей величины T и рабочим противодействием. Как проиллюстрировано на фиг. 8D, система 100 транспортного средства может увеличивать рабочее противодействие до тех пор, пока рабочая величина T не достигнет порогового значения Th инициирования вождения вручную после увеличения таким образом, что она достигает заданного значения Th0.
[0104] Фиг. 9A является схемой, показывающей пример перехода состояния вождения, обусловленного снижением рабочей величины T. Как проиллюстрировано на фиг. 9A, система 100 транспортного средства подвергается переходу из состояния совместного вождения в состояние автономного вождения в результате снижения рабочей величины T. Модуль 18 вывода информации включает уведомление после миграции в случае, если, например, рабочая величина T снижается и становится меньше порогового значения Tk определения вмешательства. Модуль 18 вывода информации выключает уведомление после миграции через предварительно определенный период времени после инициирования уведомления после миграции.
[0105] Модуль 18 вывода информации может выключать уведомление после миграции в соответствии со снижением рабочей величины T. Фиг. 9B является схемой, показывающей пример взаимосвязи между снижением рабочей величины T и включением/выключением уведомлений после миграции. Как проиллюстрировано на фиг. 9A и 9B, модуль 18 вывода информации может выполнять уведомление после миграции относительно состояния автономного вождения до тех пор, пока рабочая величина T не станет меньше заданного значения Tk0 после снижения таким образом, что она становится меньше порогового значения Tk определения вмешательства в случае, если состояние вождения транспортного средства V представляет собой состояние совместного вождения. Другими словами, модуль 18 вывода информации может включать уведомление после миграции в случае, если рабочая величина T снижается и становится меньше порогового значения Tk определения вмешательства, и может выключать уведомление после миграции в случае, если рабочая величина T продолжает снижаться таким образом, что она становится меньше заданного значения Tk0. Заданное значение Tk0 является любым значением, которое меньше порогового значения Tk определения вмешательства.
[0106] Модуль 18 вывода информации включает уведомление перед миграцией в случае, если, например, рабочая величина T снижается и становится меньше заданного значения Tk2. Заданное значение Tk2 является любым значением, которое превышает пороговое значение Tk определения вмешательства и меньше порогового значения Th инициирования вождения вручную. Модуль 18 вывода информации выключает уведомление перед миграцией через предварительно определенный период времени после инициирования уведомления перед миграцией.
[0107] Модуль 18 вывода информации может выключать уведомление перед миграцией в соответствии со снижением рабочей величины T. Фиг. 9C является схемой, показывающей пример взаимосвязи между снижением рабочей величины T и включением/выключением уведомлений перед миграцией. Как проиллюстрировано на фиг. 9C, модуль 18 вывода информации может выполнять уведомление перед миграцией относительно состояния автономного вождения до тех пор, пока рабочая величина T не станет меньше порогового значения Tk определения вмешательства после снижения таким образом, что она становится меньше заданного значения Tk2 в случае, если состояние вождения транспортного средства V представляет собой состояние совместного вождения.
[0108] Фиг. 9D является схемой, показывающей пример взаимосвязи между снижением рабочей величины T и рабочим противодействием. Как проиллюстрировано на фиг. 9D, система 100 транспортного средства может увеличивать рабочее противодействие до тех пор, пока рабочая величина T не станет меньше порогового значения Tk определения вмешательства после снижения таким образом, что она становится меньше заданного значения Tk1 в случае, если состояние вождения транспортного средства V представляет собой состояние совместного вождения.
[0109] В дальнейшем в этом документе описывается обработка, которая выполняется посредством системы 100 транспортного средства. Фиг. 10 является блок-схемой последовательности операций способа, показывающей пример обработки формирования плана движения. Обработка управления, которая проиллюстрирована на фиг. 10, выполняется, когда, например, операция запроса на инициирование автономного вождения вводится в переключатель 70 для включения/выключения автономного вождения.
[0110] Во-первых, как проиллюстрировано на фиг. 10, модуль 11 распознавания позиций транспортного средства распознает позицию транспортного средства из позиционной информации транспортного средства V, принимаемой посредством модуля 2 приемного GPS-устройства, и картографической информации из картографической базы 4 данных. Модуль 12 распознавания внешней ситуации распознает внешнюю ситуацию относительно транспортного средства V из результата обнаружения внешнего датчика 1. Модуль 13 распознавания состояний движения распознает состояние движения транспортного средства V из результата обнаружения внутреннего датчика 3 (этап S1). Затем модуль 14 формирования плана движения формирует план движения для транспортного средства V из целевого маршрута навигационной системы 5, позиции транспортного средства, внешней ситуации относительно транспортного средства V и состояния движения транспортного средства V (этап S2). План движения для транспортного средства V формируется таким образом.
[0111] В дальнейшем в этом документе описывается обработка для переключения состояния вождения транспортного средства V, которая выполняется посредством системы 100 транспортного средства. Фиг. 11 является блок-схемой последовательности операций способа, показывающей пример обработки переключения для переключения состояния вождения транспортного средства V из состояния вождения вручную посредством использования крутящего момента поворота при рулении, коррелированного с операцией руления. Обработка управления, которая проиллюстрирована на фиг. 11, многократно выполняется с предварительно определенным циклом в случае, если транспортное средство V находится в состоянии вождения вручную.
[0112] Во-первых, как проиллюстрировано на фиг. 11, модуль 16 переключения состояния вождения определяет то, вводится или нет операция запроса на инициирование автономного вождения в переключатель 70 для включения/выключения автономного вождения в случае, если состояние вождения транспортного средства V представляет собой состояние вождения вручную (этап S10). Модуль 16 переключения состояния вождения выполняет обработку определения (этап S12) с использованием порогового значения Tk определения вмешательства в случае, если определяется то, что операция запроса на инициирование автономного вождения вводится в переключатель 70 для включения/выключения автономного вождения.
[0113] Модуль 16 переключения состояния вождения определяет то, меньше или нет крутящий момент поворота при рулении на основе результата обнаружения внутреннего датчика 3 порогового значения Tk определения вмешательства, в качестве обработки определения с использованием порогового значения Tk определения вмешательства, которая проиллюстрирована на этапе S12. В случае, если определяется то, что крутящий момент поворота при рулении на основе результата обнаружения внутреннего датчика 3 меньше порогового значения Tk определения вмешательства, модуль 16 переключения состояния вождения переключает состояние вождения транспортного средства V в состояние автономного вождения (этап S14). Блок-схема последовательности операций способа, которая проиллюстрирована на фиг. 11, завершается, когда завершается обработка переключения, которая проиллюстрирована на фиг. 14. Состояние вождения транспортного средства V подвергается переходу из состояния вождения вручную в состояние автономного вождения, и состояние вождения транспортного средства V больше не представляет собой состояние вождения вручную, что представляет собой предварительное условие для блок-схемы последовательности операций способа, проиллюстрированной на фиг. 11. Соответственно, последующая обработка для повторения блок-схемы последовательности операций способа, проиллюстрированной на фиг. 11, не выполняется, и инициируется блок-схема последовательности операций способа, которая проиллюстрирована на фиг. 12 (описана ниже).
[0114] Модуль 16 переключения состояния вождения выполняет обработку определения (этап S16) с использованием порогового значения Th инициирования вождения вручную в случае, если определяется то, что крутящий момент поворота при рулении на основе результата обнаружения внутреннего датчика 3 не меньше порогового значения Tk определения вмешательства. Модуль 16 переключения состояния вождения определяет то, меньше или нет рабочая величина T (к примеру, крутящий момент поворота при рулении) на основе результата обнаружения внутреннего датчика 3 порогового значения Th инициирования вождения вручную, в качестве обработки определения с использованием порогового значения Th инициирования вождения вручную, которая проиллюстрирована на этапе S16. Модуль 16 переключения состояния вождения переключает состояние вождения транспортного средства V в состояние совместного вождения (этап S18) в случае, если определяется то, что крутящий момент поворота при рулении на основе результата обнаружения внутреннего датчика 3 меньше порогового значения Th инициирования вождения вручную. Блок-схема последовательности операций способа, которая проиллюстрирована на фиг. 11, завершается, когда завершается обработка переключения, которая проиллюстрирована на этапе S18. Состояние вождения транспортного средства V подвергается переходу из состояния вождения вручную в состояние совместного вождения, и состояние вождения транспортного средства V больше не представляет собой состояние вождения вручную, что представляет собой предварительное условие для блок-схемы последовательности операций способа, проиллюстрированной на фиг. 11. Соответственно, последующая обработка для повторения блок-схемы последовательности операций способа, проиллюстрированной на фиг. 11, не выполняется, и инициируется блок-схема последовательности операций способа, которая проиллюстрирована на фиг. 12 (описана иже).
[0115] Модуль 16 переключения состояния вождения поддерживает состояние вождения вручную (этап S20) в случае, если определяется то, что крутящий момент поворота при рулении на основе результата обнаружения внутреннего датчика 3 не меньше порогового значения Th инициирования вождения вручную. Аналогично, модуль 16 переключения состояния вождения поддерживает состояние вождения вручную (этап S20) в случае, если определяется то, что операция запроса на инициирование автономного вождения не вводится в переключатель 70 для включения/выключения автономного вождения. После этого блок-схема последовательности операций способа, которая проиллюстрирована на фиг. 11, завершается. Состояние вождения транспортного средства V не подвергнуто переходу из состояния вождения вручную, и в силу этого в дальнейшем многократно выполняется блок-схема последовательности операций способа, которая проиллюстрирована на фиг. 11.
[0116] В дальнейшем в этом документе описывается обработка переключения состояния вождения, которая выполняется посредством системы 100 транспортного средства в случае, если состояние вождения транспортного средства V представляет собой состояние автономного вождения или состояние совместного вождения. Фиг. 12 является блок-схемой последовательности операций способа, показывающей пример обработки переключения для переключения состояния вождения транспортного средства V в состояние автономного вождения или состояние совместного вождения посредством использования крутящего момента поворота при рулении. Обработка управления, которая проиллюстрирована на фиг. 12, многократно выполняется с предварительно определенным циклом в случае, если транспортное средство V находится в состоянии автономного вождения или состоянии совместного вождения.
[0117] Во-первых, как проиллюстрировано на фиг. 12, модуль 16 переключения состояния вождения определяет то, меньше или нет крутящий момент поворота при рулении на основе результата обнаружения внутреннего датчика 3 порогового значения Tk определения вмешательства, в качестве обработки определения с использованием порогового значения Tk определения вмешательства, которая проиллюстрирована на этапе S32. Модуль 16 переключения состояния вождения определяет состояние вождения транспортного средства V в качестве состояния автономного вождения (этап S34) в случае, если определяется то, что крутящий момент поворота при рулении на основе результата обнаружения внутреннего датчика 3 меньше порогового значения Tk определения вмешательства. Другими словами, модуль 16 переключения состояния вождения поддерживает состояние автономного вождения в случае, если состояние вождения транспортного средства V представляет собой состояние автономного вождения, и переключает состояние вождения транспортного средства V в состояние автономного вождения в случае, если состояние вождения транспортного средства V представляет собой состояние совместного вождения. Блок-схема последовательности операций способа, которая проиллюстрирована на фиг. 12, завершается, когда завершается обработка, которая проиллюстрирована на этапе S34. Состояние вождения транспортного средства V не подвергнуто переходу в состояние вождения вручную, и в силу этого в дальнейшем многократно выполняется блок-схема последовательности операций способа, которая проиллюстрирована на фиг. 12.
[0118] Модуль 16 переключения состояния вождения выполняет обработку определения (этап S36) с использованием порогового значения Th инициирования вождения вручную в случае, если определяется то, что крутящий момент поворота при рулении на основе результата обнаружения внутреннего датчика 3 не меньше порогового значения Tk определения вмешательства. Модуль 16 переключения состояния вождения определяет то, меньше или нет крутящий момент поворота при рулении на основе результата обнаружения внутреннего датчика 3 порогового значения Th инициирования вождения вручную, в качестве обработки определения с использованием порогового значения Th инициирования вождения вручную, которая проиллюстрирована на этапе S36. Модуль 16 переключения состояния вождения определяет состояние вождения транспортного средства V в качестве состояния совместного вождения (этап S38) в случае, если определяется то, что крутящий момент на основе результата обнаружения внутреннего датчика 3 меньше порогового значения Th инициирования вождения вручную. Другими словами, модуль 16 переключения состояния вождения переключает состояние вождения транспортного средства V в состояние совместного вождения в случае, если состояние вождения транспортного средства V представляет собой состояние автономного вождения, и поддерживает состояние совместного вождения в случае, если состояние вождения транспортного средства V представляет собой состояние совместного вождения. Блок-схема последовательности операций способа, которая проиллюстрирована на фиг. 12, завершается, когда завершается обработка, которая проиллюстрирована на этапе S38. Состояние вождения транспортного средства V не подвергнуто переходу в состояние вождения вручную, и в силу этого в дальнейшем многократно выполняется блок-схема последовательности операций способа, которая проиллюстрирована на фиг. 12.
[0119] Модуль 16 переключения состояния вождения переключает состояние вождения транспортного средства V в состояние вождения вручную (этап S40) в случае, если определяется то, что крутящий момент поворота при рулении на основе результата обнаружения внутреннего датчика 3 не меньше порогового значения Th инициирования вождения вручную. После этого блок-схема последовательности операций способа, которая проиллюстрирована на фиг. 12, завершается. Состояние вождения подвергается переходу из состояния автономного вождения или состояния совместного вождения в состояние вождения вручную, и состояние вождения транспортного средства V больше не представляет собой состояние автономного вождения или состояние совместного вождения, что представляет собой предварительное условие для блок-схемы последовательности операций способа, проиллюстрированной на фиг. 12. Соответственно, последующая обработка для повторения блок-схемы последовательности операций способа, проиллюстрированной на фиг. 12, не выполняется, и инициируется блок-схема последовательности операций способа, которая проиллюстрирована на фиг. 11.
[0120] Как описано выше со ссылкой на фиг. 11 и 12, переключение на/из состояния автономного вождения, состояния совместного вождения и состояния вождения вручную выполняется посредством модуля 16 переключения состояния вождения на основе крутящего момента поворота при рулении, коррелированного с операцией руления. Хотя фиг. 11 и 12 не показывают случай, когда состояние вождения транспортного средства V представляет собой состояние автономного вождения или состояние совместного вождения, и операция запроса на завершение автономного вождения вводится после ввода операции запроса на инициирование автономного вождения в переключатель 70 для включения/выключения автономного вождения, в этом случае модуль 16 переключения состояния вождения выполняет обработку для переключения состояния вождения транспортного средства V из состояния автономного вождения или состояния совместного вождения в состояние вождения вручную.
[0121] В вышеприведенном описании приведен случай, в котором модуль 16 переключения состояния вождения переключает состояние вождения транспортного средства V на основе рабочей величины (крутящего момента поворота при рулении) операции руления в качестве примера операции вождения. Тем не менее, крутящий момент поворота при рулении может быть заменен углом поворота при рулении или может быть заменен величиной нажатия педали акселератора или педали тормоза (позицией педали). Другими словами, модуль 16 переключения состояния вождения может переключать состояние вождения транспортного средства V на основе угла поворота при рулении операции руления или может переключать состояние вождения транспортного средства V на основе величины нажатия педали акселератора или педали тормоза.
[0122] В дальнейшем в этом документе описывается обработка для отображения рабочей величины T, которая выполняется посредством системы 100 транспортного средства. Фиг. 13 является блок-схемой последовательности операций способа, показывающей пример обработки для отображения рабочей величины T. Обработка управления, которая проиллюстрирована на фиг. 13, многократно выполняется с предварительно определенным циклом в случае, если, например, состояние вождения транспортного средства V представляет собой состояние автономного вождения или состояние совместного вождения. Обработка управления, которая проиллюстрирована на фиг. 13, может многократно выполняться с предварительно определенным циклом даже в случае, если состояние вождения транспортного средства V представляет собой состояние вождения вручную.
[0123] Во-первых, как проиллюстрировано на фиг. 13, модуль 15 получения информации операций вождения определяет то, получается или нет информация операций вождения (этап S100). В случае, если определяется то, что информация операций вождения не получается, модуль 15 получения информации операций вождения завершает блок-схему последовательности операций способа, которая проиллюстрирована на фиг. 13. Затем модуль 15 получения информации операций вождения инициирует определение S100 снова через предварительно определенный период времени.
[0124] В случае, если определяется то, что информация операций вождения не получается посредством модуля 15 получения информации операций вождения, модуль 18 вывода информации отображает состояние рабочей величины T относительно порогового значения Tk определения вмешательства и порогового значения Th инициирования вождения вручную посредством передачи управляющего сигнала в модуль 7a отображения на основе информации операций вождения (этап S102).
[0125] В системе 100 транспортного средства согласно этому варианту осуществления, состояние рабочей величины T относительно порогового значения Tk определения вмешательства и порогового значения Th инициирования вождения вручную отображается на модуле 7a отображения в случае, если состояние вождения транспортного средства V переключается в соответствии с рабочей величиной T, и за счет этого водитель может иметь сведения по рабочей величине T до тех пор, пока состояние вождения транспортного средства V не переключится. Соответственно, с помощью системы 100 транспортного средства, водитель может переключать состояние вождения транспортного средства V в зависимости от рабочей величины T в намеченное время.
[0126] Система 100 транспортного средства, описанная выше, также может допускать переключение состояния вождения транспортного средства только между двумя состояниями вождения из числа состояния автономного вождения и состояния вождения вручную. В этом случае, система 100 транспортного средства отображает состояние рабочей величины T относительно порогового значения Th инициирования вождения вручную на модуле 7a отображения, и за счет этого водитель может иметь сведения по рабочей величине T до тех пор, пока состояние вождения транспортного средства V не переключится в состояние вождения вручную. Соответственно, водитель может выполнять переключение в состояние вождения вручную в зависимости от рабочей величины T в намеченное время. Аналогично, система 100 транспортного средства может допускать переключение состояния вождения транспортного средства только между двумя состояниями вождения из числа состояния совместного вождения и состояния вождения вручную. Даже в этом случае, система 100 транспортного средства отображает состояние рабочей величины T относительно порогового значения Th инициирования вождения вручную на модуле 7a отображения, и за счет этого водитель может выполнять переключение в состояние вождения вручную в зависимости от рабочей величины T в намеченное время.
[0127] Выше описан предпочтительный вариант осуществления изобретения. Изобретение не ограничено вариантом осуществления, описанным выше. Изобретение может иметь различные формы, в которых различные модификации и улучшения добавляются, на основе сведений специалистов в данной области техники, в вариант осуществления, описанный выше.
[0128] ПЕРВЫЙ ПРИМЕР МОДИФИКАЦИИ
В вышеприведенном описании варианта осуществления приведен случай, когда одно пороговое значение используется в качестве порогового значения, связанного с переключением из состояния автономного вождения в состояние совместного вождения, и порогового значения, связанного с переключением из состояния совместного вождения в состояние автономного вождения. Тем не менее, различные пороговые значения могут использоваться в качестве пороговых значений. Фиг. 14A является схемой, показывающей другой пример перехода состояния вождения, который обусловлен увеличением рабочей величины T. Как проиллюстрировано на фиг. 14A, система 100 транспортного средства может иметь, например, пороговое значение Tk определения вмешательства в качестве порогового значения, связанного с переключением из состояния автономного вождения в состояние совместного вождения, и пороговое значение Tf инициирования автономного вождения в качестве порогового значения, связанного с переключением из состояния совместного вождения в состояние автономного вождения. Другими словами, система 100 транспортного средства поддерживает состояние вождения транспортного средства V в состоянии совместного вождения в случае, если рабочая величина T равна или выше порогового значения Tf инициирования автономного вождения, даже когда рабочая величина T становится меньше порогового значения Tk определения вмешательства, после того, как состояние вождения транспортного средства V переключается из состояния автономного вождения в состояние совместного вождения. Когда гистерезису разрешено вступать в действие, как описано выше, может не допускаться частое переключение в состояние около порогового значения. Пороговое значение Tf инициирования автономного вождения является любым значением, меньшим порогового значения Tk определения вмешательства. В частности, частое переключение в состояние вождения может не допускаться, когда рабочая величина практически равна T1 порогового значения определения вмешательства.
[0129] Как проиллюстрировано на фиг. 14A, модуль 18 вывода информации изменяет пороговое значение, отображаемое на модуле 7a отображения, в зависимости от текущего состояния вождения в случае, если пороговое значение, связанное с переключением, изменяется в зависимости от текущего состояния вождения. В случае, если состояние вождения транспортного средства V представляет собой состояние автономного вождения, например, модуль 18 вывода информации не отображает пороговое значение Tf инициирования автономного вождения и отображает пороговое значение Tk определения вмешательства и пороговое значение Th инициирования вождения вручную. Другими словами, модуль 18 вывода информации отображает состояние рабочей величины T относительно порогового значения Tk определения вмешательства и порогового значения Th инициирования вождения вручную на модуле 7a отображения. В случае, если состояние вождения транспортного средства V представляет собой состояние совместного вождения, например, модуль 18 вывода информации не отображает пороговое значение Tk определения вмешательства и отображает пороговое значение Tf инициирования автономного вождения и пороговое значение Th инициирования вождения вручную. Другими словами, модуль 18 вывода информации отображает состояние рабочей величины T относительно порогового значения Tf инициирования автономного вождения и порогового значения Th инициирования вождения вручную на модуле 7a отображения. Даже в случае, если состояние вождения транспортного средства V представляет собой состояние вождения вручную, например, модуль 18 вывода информации не отображает пороговое значение Tk определения вмешательства и отображает пороговое значение Tf инициирования автономного вождения и пороговое значение Th инициирования вождения вручную. Альтернативно, модуль 18 вывода информации может отображать только пороговое значение Th инициирования вождения вручную в случае, если состояние вождения транспортного средства V представляет собой состояние вождения вручную.
[0130] В случае, если пороговое значение, связанное с переключением, изменяется в зависимости от текущего состояния вождения, модуль 18 вывода информации также изменяет время уведомления после миграции и уведомления перед миграцией, как проиллюстрировано на фиг. 14A. В случае, если состояние вождения транспортного средства V представляет собой состояние автономного вождения, например, модуль 18 вывода информации включает уведомление после миграции, когда рабочая величина T увеличивается и достигает порогового значения Tk определения вмешательства. Модуль 18 вывода информации выключает уведомление после миграции через предварительно определенный период времени после инициирования уведомления после миграции.
[0131] Модуль 18 вывода информации может выключать уведомление после миграции в соответствии с увеличением рабочей величины T. Фиг. 14B является схемой, показывающей другой пример взаимосвязи между увеличением рабочей величины T и включением/выключением уведомлений после миграции. Как проиллюстрировано на фиг. 14A и 14B, модуль 18 вывода информации выполняет уведомление после миграции до тех пор, пока рабочая величина T не достигнет заданного значения Tk1 после увеличения таким образом, что она достигает порогового значения Tk определения вмешательства в случае, если, например, состояние вождения транспортного средства V представляет собой состояние автономного вождения. Другими словами, модуль 18 вывода информации включает уведомление после миграции в случае, если рабочая величина T увеличивается и достигает порогового значения Tk определения вмешательства, и выключает уведомление после миграции в случае, если рабочая величина T продолжает увеличиваться и достигает заданного значения Tk1.
[0132] Помимо этого, модуль 18 вывода информации включает уведомление перед миграцией, когда рабочая величина T увеличивается и достигает заданного значения Th0 в случае, если, например, состояние вождения транспортного средства V представляет собой состояние совместного вождения. Модуль 18 вывода информации выключает уведомление перед миграцией через предварительно определенный период времени после инициирования уведомления перед миграцией.
[0133] Модуль 18 вывода информации может выключать уведомление перед миграцией в соответствии с увеличением рабочей величины T. Фиг. 14C является схемой, показывающей другой пример взаимосвязи между увеличением рабочей величины T и включением/выключением уведомлений перед миграцией. Как проиллюстрировано на фиг. 14A и 14C, модуль 18 вывода информации выполняет уведомление перед миграцией до тех пор, пока рабочая величина T не достигнет порогового значения Th инициирования вождения вручную после увеличения таким образом, что она достигает заданного значения Th0 в случае, если, например, состояние вождения транспортного средства V представляет собой состояние совместного вождения.
[0134] Фиг. 15A является схемой, показывающей другой пример перехода состояния вождения, который обусловлен снижением рабочей величины T. Как проиллюстрировано на фиг. 15A, модуль 18 вывода информации не выполняет уведомление после миграции, даже когда рабочая величина T снижается и становится меньше порогового значения Tk определения вмешательства, в случае, если состояние вождения транспортного средства V представляет собой состояние совместного вождения, поскольку состояние вождения не подвергнуто миграции в состояние автономного вождения. Модуль 18 вывода информации включает уведомление после миграции, когда рабочая величина T снижается и становится меньше порогового значения Tf инициирования автономного вождения в случае, если, например, состояние вождения транспортного средства V представляет собой состояние совместного вождения. Модуль 18 вывода информации выключает уведомление после миграции через предварительно определенный период времени после инициирования уведомления после миграции.
[0135] Модуль 18 вывода информации может выключать уведомление после миграции в соответствии со снижением рабочей величины T. Фиг. 15B является схемой, показывающей другой пример взаимосвязи между снижением рабочей величины T и включением/выключением уведомлений после миграции. Как проиллюстрировано на фиг. 15A и 15B, модуль 18 вывода информации выполняет уведомление после миграции до тех пор, пока рабочая величина T не достигнет порогового значения Tf0 после снижения таким образом, что она становится меньше порогового значения Tff инициирования автономного вождения в случае, если, например, состояние вождения транспортного средства V представляет собой состояние совместного вождения. Пороговое значение Tf0 является любым значением, меньшим порогового значения Tf инициирования автономного вождения.
[0136] Помимо этого, модуль 18 вывода информации включает уведомление перед миграцией, когда рабочая величина T снижается и становится меньше заданного значения Tf1 в случае, если, например, состояние вождения транспортного средства V представляет собой состояние совместного вождения. Заданное значение Tf1 является любым значением, которое превышает пороговое значение Tf инициирования автономного вождения и меньше порогового значения Tk определения вмешательства. Модуль 18 вывода информации выключает уведомление перед миграцией через предварительно определенный период времени после инициирования уведомления перед миграцией.
[0137] Модуль 18 вывода информации может выключать уведомление перед миграцией в соответствии со снижением рабочей величины T. Фиг. 15C является схемой, показывающей другой пример взаимосвязи между снижением рабочей величины T и включением/выключением уведомлений перед миграцией. Как проиллюстрировано на фиг. 15A и 15C, модуль 18 вывода информации выполняет уведомление перед миграцией до тех пор, пока рабочая величина T не станет меньше порогового значения Tf инициирования автономного вождения после снижения таким образом, что она становится меньше заданного значения Tf1 в случае, если, например, состояние вождения транспортного средства V представляет собой состояние совместного вождения.
[0138] ВТОРОЙ ПРИМЕР МОДИФИКАЦИИ
В состоянии совместного вождения варианта осуществления, описанного выше, совместное вождение может выполняться посредством использования значения, которое получается посредством взвешивания рабочей величины операции водителя и целевого значения управления на основе плана движения. Это задание обеспечивает возможность изменения степени вмешательства системы в состоянии совместного вождения и в силу этого обеспечивает возможность выполнения хода изменения состояния вождения с учетом поведения транспортного средства. В случае, если, например, крутящий момент поворота при рулении является целью управления, целевой крутящий момент TR поворота при рулении может извлекаться посредством использования следующей формулы, в которой TD представляет крутящий момент поворота при рулении водителя, а TS представляет системный входной крутящий момент.
TR=w1*TD*w2⋅TS,
w1 и w2 являются весовыми коэффициентами. Весовые коэффициенты w1, w2 могут быть константами либо могут быть переменными. Например, весовые коэффициенты w1, w2 могут изменяться в соответствии со скоростью транспортного средства V.
[0139] Фиг. 16A является схемой, показывающей еще один другой пример перехода состояния вождения, который обусловлен увеличением рабочей величины T. Фиг. 16A является схемой, показывающей пример взвешенного изменения состояния совместного вождения. Согласно фиг. 16A, система 100 транспортного средства задает промежуточное пороговое значение Tm, которое превышает пороговое значение Tk определения вмешательства и меньше порогового значения Th инициирования вождения вручную, и задает весовые коэффициенты w1, w2 для участка M1 между пороговым значением Tk определения вмешательства и промежуточным пороговым значением Tm отличающимися от весовых коэффициентов w1, w2 для участка M2 между промежуточным пороговым значением Tm и пороговым значением Th инициирования вождения вручную, как проиллюстрировано на фиг. 16A. На участке M1, целевое значение управления на основе плана движения задается таким образом, что оно имеет больший весовой коэффициент, чем рабочая величина операции водителя (w1<w2). На участке M2, целевое значение управления на основе плана движения задается таким образом, что оно имеет меньший весовой коэффициент, чем рабочая величина операции водителя (w1>w2). Изменение взвешивания в состоянии совместного вождения может выполняться посредством использования задания пороговых коэффициентов, как описано выше. Хотя фиг. 16A показывает пример изменения взвешивания с одним пороговым значением, изменение взвешивания также может выполняться с двумя или более пороговых значений.
[0140] В случае, если, например, используются три пороговых значения из числа порогового значения Tk определения вмешательства, промежуточного порогового значения Tm и порогового значения Th инициирования вождения вручную, модуль 18 вывода информации отображает все три пороговых значения на модуле 7a отображения, как проиллюстрировано на фиг. 16A. Модуль 18 вывода информации отображает состояние рабочей величины T относительно трех пороговых значений из порогового значения Tk определения вмешательства, промежуточного порогового значения Tm и порогового значения Th инициирования вождения вручную на модуле 7a отображения.
[0141] Например, модуль 18 вывода информации отображает промежуточное пороговое значение Tm способом, аналогичным тому, как отображаются пороговое значение Tk определения вмешательства и пороговое значение Th инициирования вождения вручную, проиллюстрированные на фиг. 4-6. Альтернативно, модуль 18 вывода информации может отображать промежуточное пороговое значение Tm, которое является пороговым значением, связанным с внутренним параметром, таким как весовой коэффициент, менее четко, чем пороговое значение Tk определения вмешательства и пороговое значение Th инициирования вождения вручную. Другими словами, модуль 18 вывода информации не может отображать символ Tm во втором примере отображения, который проиллюстрирован на фиг. 5, например, при одновременном показе промежуточного порогового значения Tm в качестве граничной линии на основе цветового различия или граничной линии на основе яркостного различия между пороговым значением Tk определения вмешательства и пороговым значением Th инициирования вождения вручную. Посредством аналогичного способа, промежуточное пороговое значение Tm также может отображаться менее четко в третьем и четвертом примерах отображения на фиг. 5
[0142] Как проиллюстрировано на фиг. 16A, модуль 18 вывода информации включает уведомление после миграции, когда рабочая величина T увеличивается и достигает любого из порогового значения Tk определения вмешательства, промежуточного порогового значения Tm и порогового значения Th инициирования вождения вручную. Модуль 18 вывода информации выключает уведомление после миграции через предварительно определенный период времени после инициирования уведомления после миграции.
[0143] Модуль 18 вывода информации может выключать уведомление после миграции в соответствии с увеличением рабочей величины T. Фиг. 16B является схемой, показывающей еще один другой пример взаимосвязи между увеличением рабочей величины T и включением/выключением уведомлений после миграции. Как проиллюстрировано на фиг. 16A и 16B, модуль 18 вывода информации выполняет уведомление после миграции до тех пор, пока рабочая величина T не достигнет заданного значения Tk1 после увеличения таким образом, что она достигает порогового значения Tk определения вмешательства в случае, если, например, состояние вождения транспортного средства V представляет собой состояние автономного вождения. Помимо этого, модуль 18 вывода информации выполняет уведомление после миграции до тех пор, пока рабочая величина T не достигнет заданного значения Tm1 после увеличения таким образом, что она достигает промежуточного порогового значения Tm в случае, если состояние вождения транспортного средства V представляет собой состояние совместного вождения. Помимо этого, модуль 18 вывода информации выполняет уведомление после миграции до тех пор, пока рабочая величина T не достигнет заданного значения Th1 после увеличения таким образом, что она достигает порогового значения Th инициирования вождения вручную. Заданное значение Tm1 является любым значением, которое превышает промежуточное пороговое значение Tm и меньше порогового значения Th инициирования вождения вручную.
[0144] Модуль 18 вывода информации включает уведомление перед миграцией, когда, например, рабочая величина T увеличивается и достигает заданного значения Tk0, заданного значения Tm0 или заданного значения Th0. Модуль 18 вывода информации выключает уведомление перед миграцией через предварительно определенный период времени после инициирования уведомления перед миграцией. Заданное значение Tm0 является любым значением, которое превышает пороговое значение Tk определения вмешательства и меньше промежуточного порогового значения Tm.
[0145] Модуль 18 вывода информации может выключать уведомление перед миграцией в соответствии с увеличением рабочей величины T. Фиг. 16C является схемой, показывающей другой пример взаимосвязи между увеличением рабочей величины T и включением/выключением уведомлений перед миграцией. Как проиллюстрировано на фиг. 16A и 16C, модуль 18 вывода информации может выполнять уведомление перед миграцией до тех пор, пока рабочая величина T не достигнет порогового значения Tk определения вмешательства после увеличения таким образом, что она достигает заданного значения Tk0 в случае, если состояние вождения транспортного средства V представляет собой состояние автономного вождения. Помимо этого, модуль 18 вывода информации может выполнять уведомление перед миграцией до тех пор, пока рабочая величина T не достигнет промежуточного порогового значения Tm после увеличения таким образом, что она достигает заданного значения Tm0 в случае, если состояние вождения транспортного средства V представляет собой состояние совместного вождения. Помимо этого, модуль 18 вывода информации может выполнять уведомление перед миграцией до тех пор, пока рабочая величина T не достигнет порогового значения Th инициирования вождения вручную после увеличения таким образом, что она достигает заданного значения Th0 в случае, если состояние вождения транспортного средства V представляет собой состояние совместного вождения.
[0146] Согласно фиг. 16B и 16C, модуль 18 вывода информации выполняет уведомление после миграции и уведомление перед миграцией, связанные с промежуточным пороговым значением Tm. Тем не менее, модуль 18 вывода информации может не выполнять уведомление после миграции и уведомление перед миграцией, связанные с промежуточным пороговым значением Tm. Аналогично, модуль 18 вывода информации может не выполнять уведомление после миграции и уведомление перед миграцией, связанные с пороговым значением Tk определения вмешательства. Модуль 18 вывода информации может выполнять одно или ни одного из уведомления после миграции и уведомления перед миграцией, связанных с промежуточным пороговым значением Tm, даже в случае, если рабочая величина T снижается. Помимо этого, отображение взаимосвязи между пороговым значением и рабочей величиной в модуле отображения может быть заменено аудиоуведомлением или уведомлением в форме вибрации в части, с которой водитель находится в контакте, примеры чего включают в себя руль и сиденье.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОМОЩИ ПРИ ВОЖДЕНИИ И УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ | 2017 |
|
RU2742400C1 |
| УСТРОЙСТВО ПРЕДОСТАВЛЕНИЯ ИНФОРМАЦИИ ДЛЯ ИСПОЛЬЗОВАНИЯ В ТРАНСПОРТНОМ СРЕДСТВЕ | 2012 |
|
RU2549578C1 |
| УСТРОЙСТВО ОБРАБОТКИ ИНФОРМАЦИИ | 2021 |
|
RU2765067C2 |
| УСТРОЙСТВО ОБРАБОТКИ ИНФОРМАЦИИ | 2019 |
|
RU2742459C2 |
| ОБОРУДОВАНИЕ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА В АВАРИЙНОМ РЕЖИМЕ | 2019 |
|
RU2706754C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2020 |
|
RU2729868C1 |
| СПОСОБ И УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ | 2020 |
|
RU2798793C2 |
| ПОМОЩНИК ПРИ ВОЖДЕНИИ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ ПОМОЩИ ПРИ ВОЖДЕНИИ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2492082C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО И ИНТЕРФЕЙС УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2021 |
|
RU2754019C1 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2503559C2 |
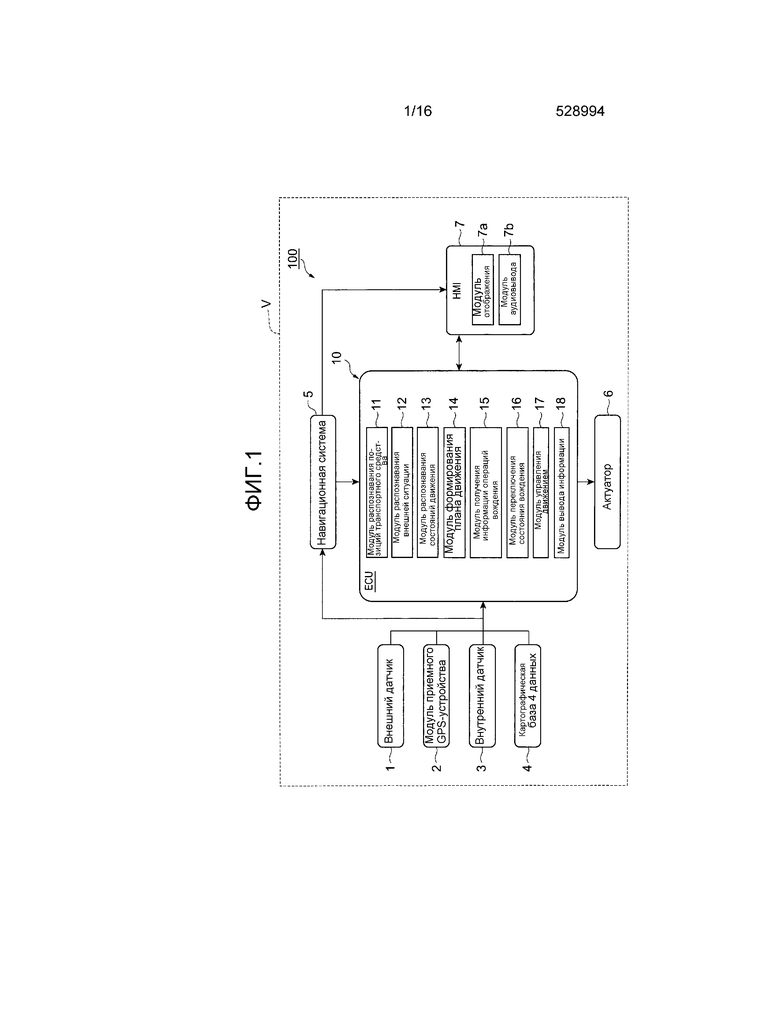
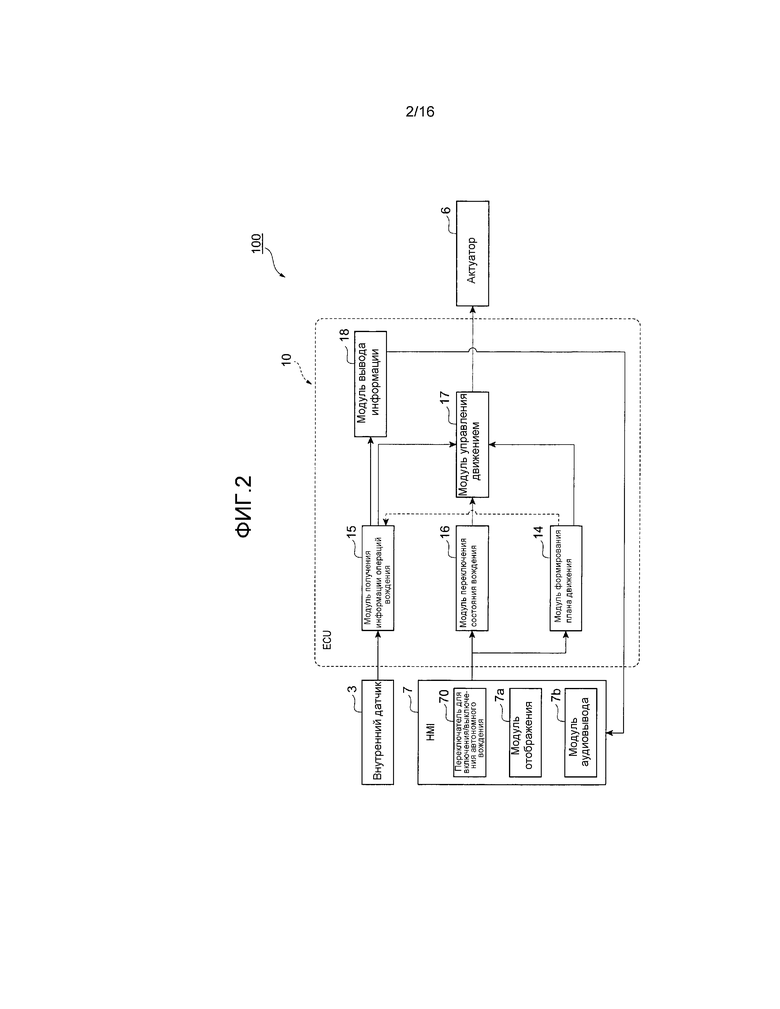
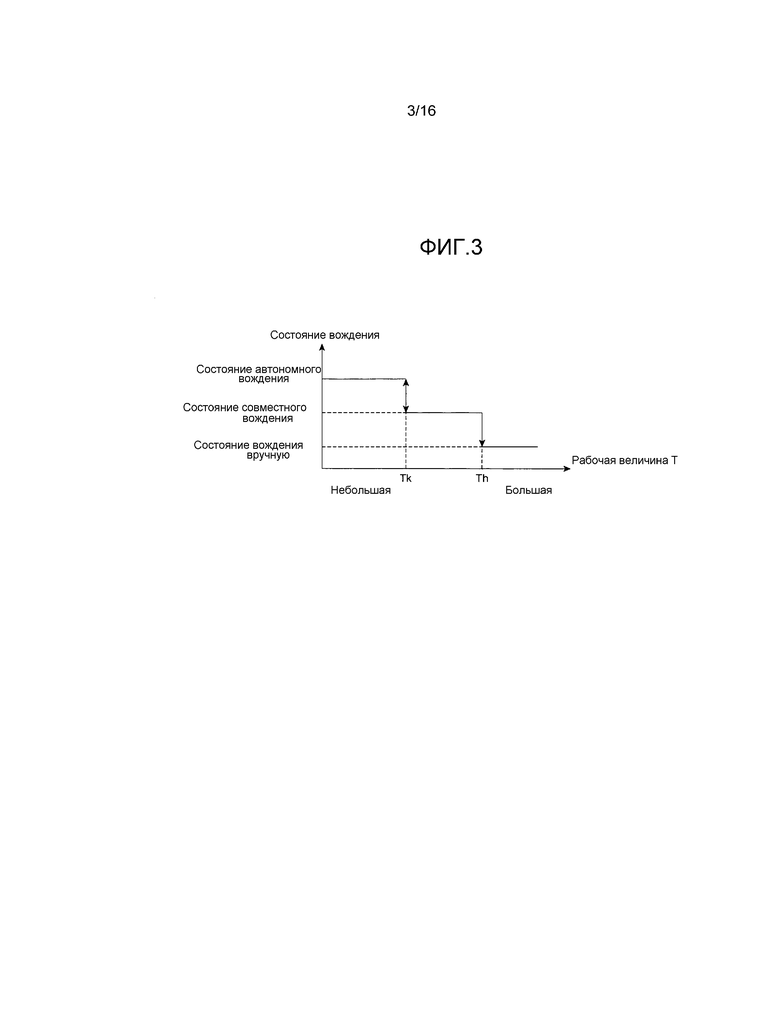
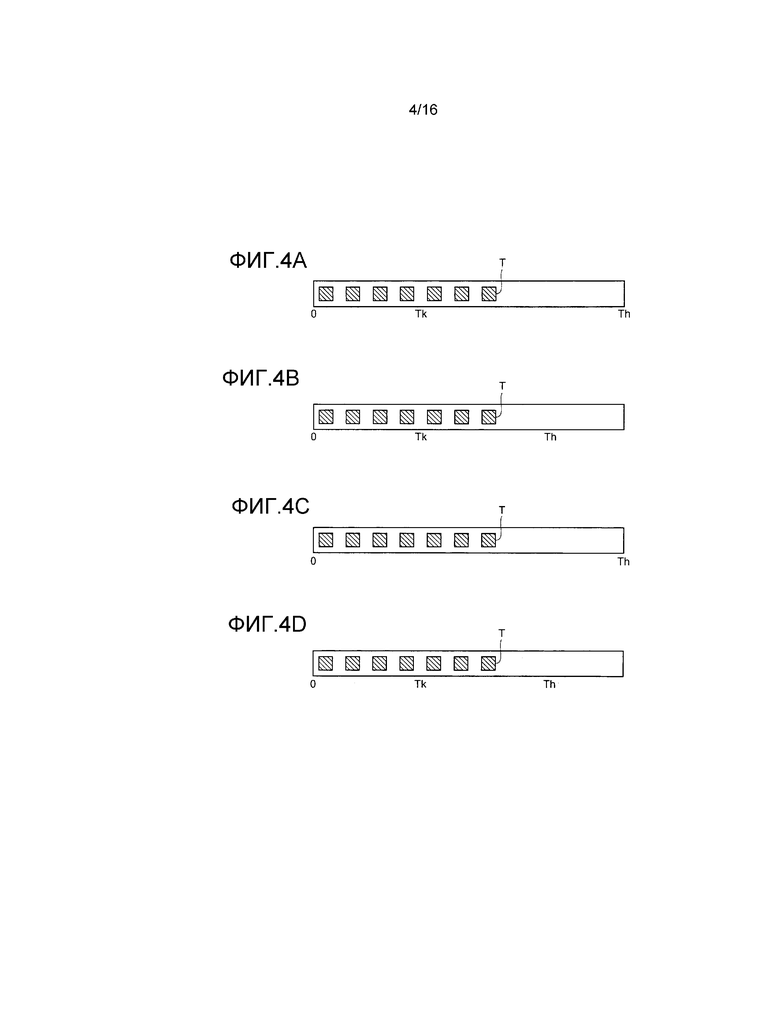
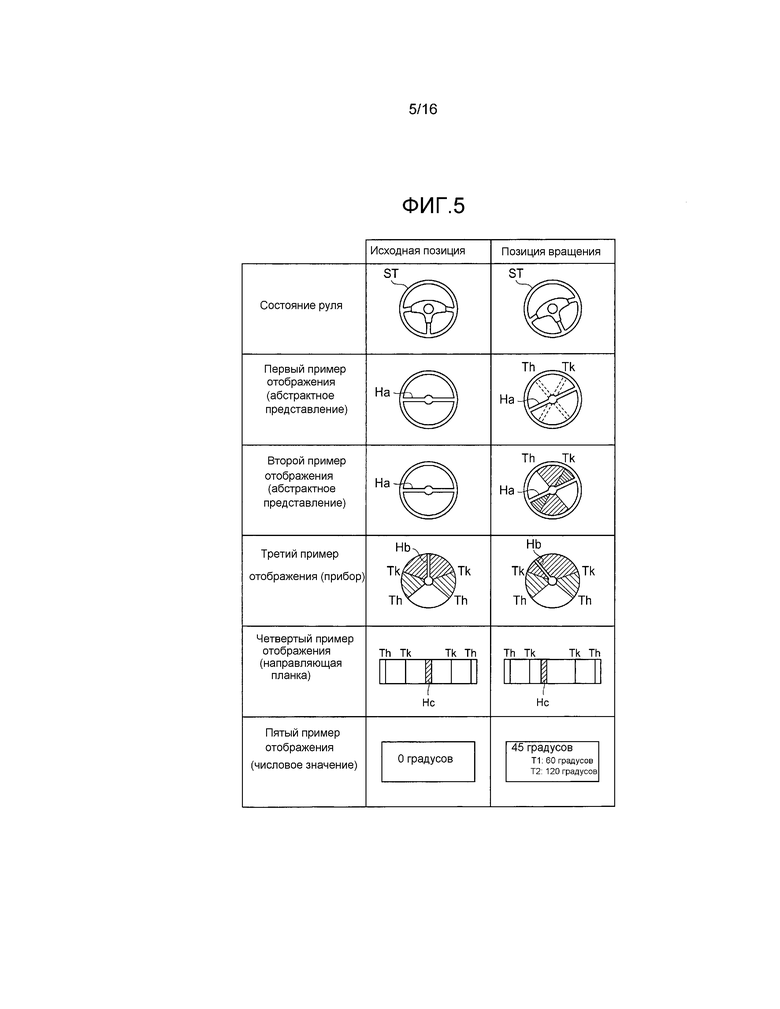
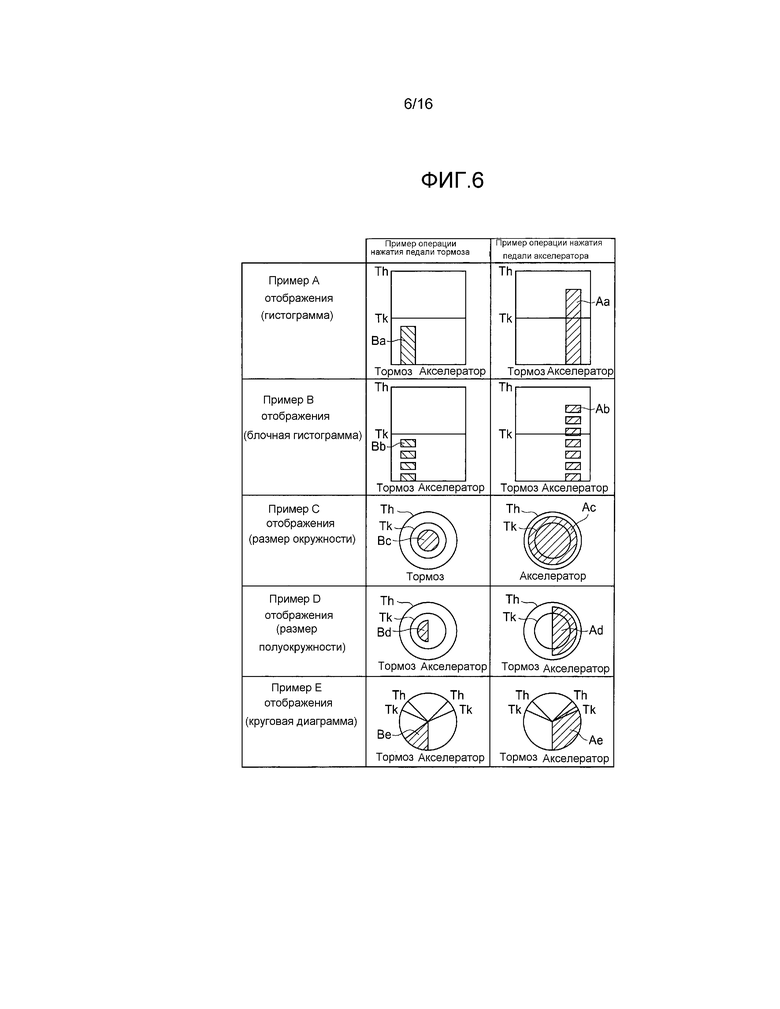
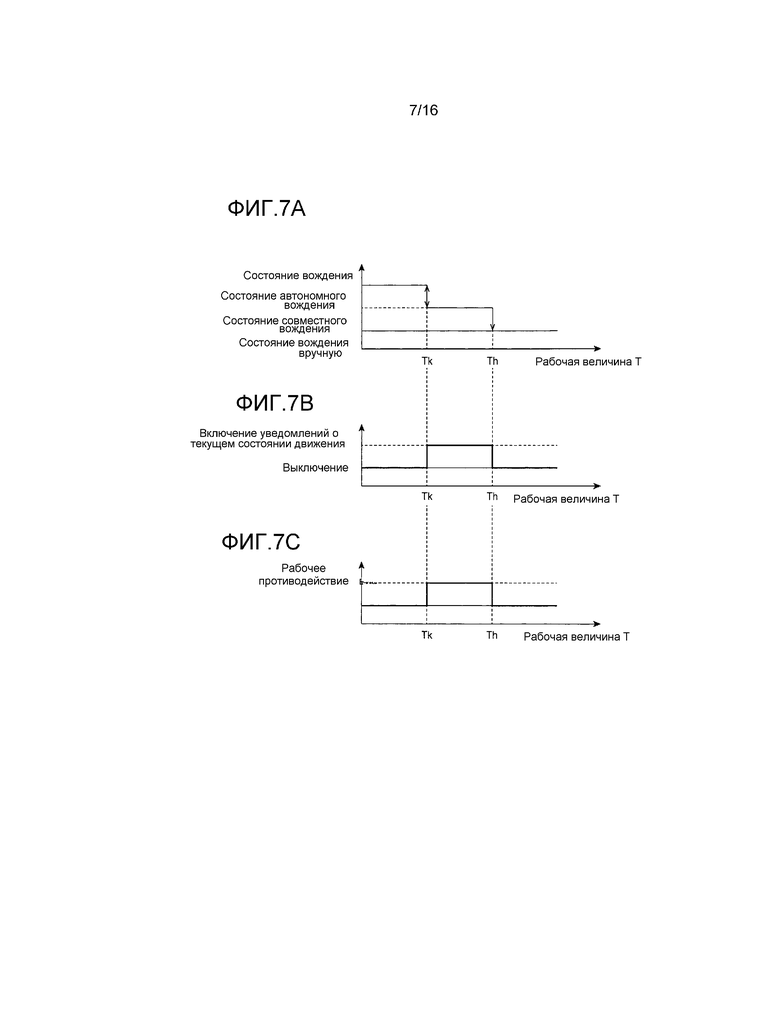
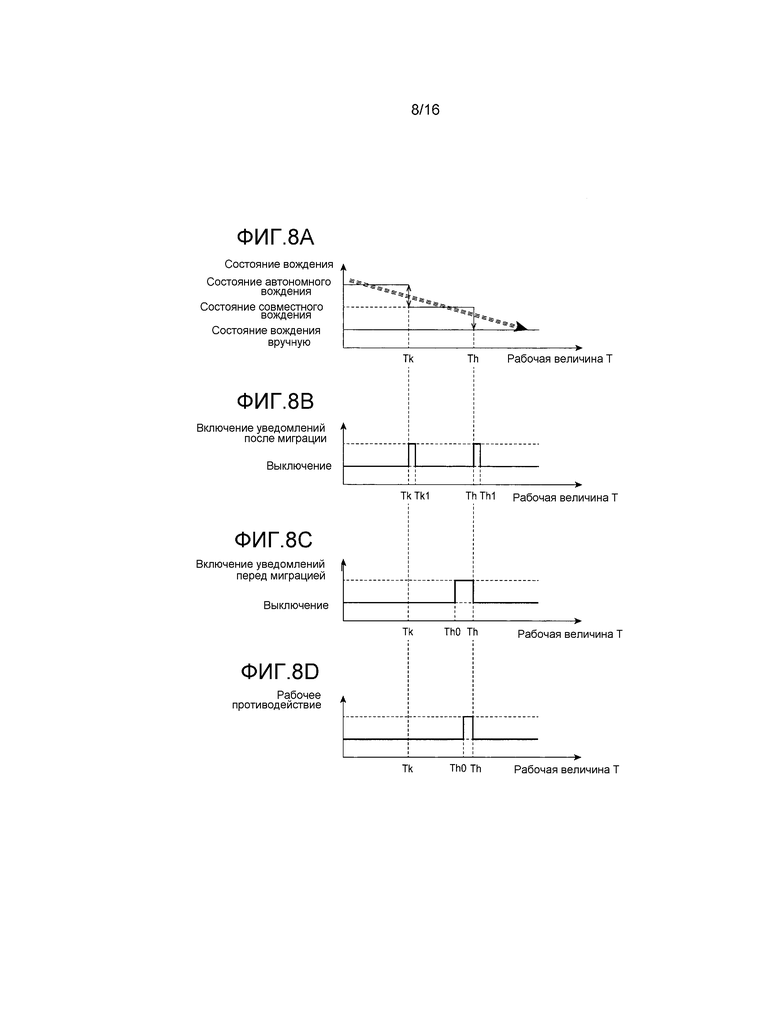
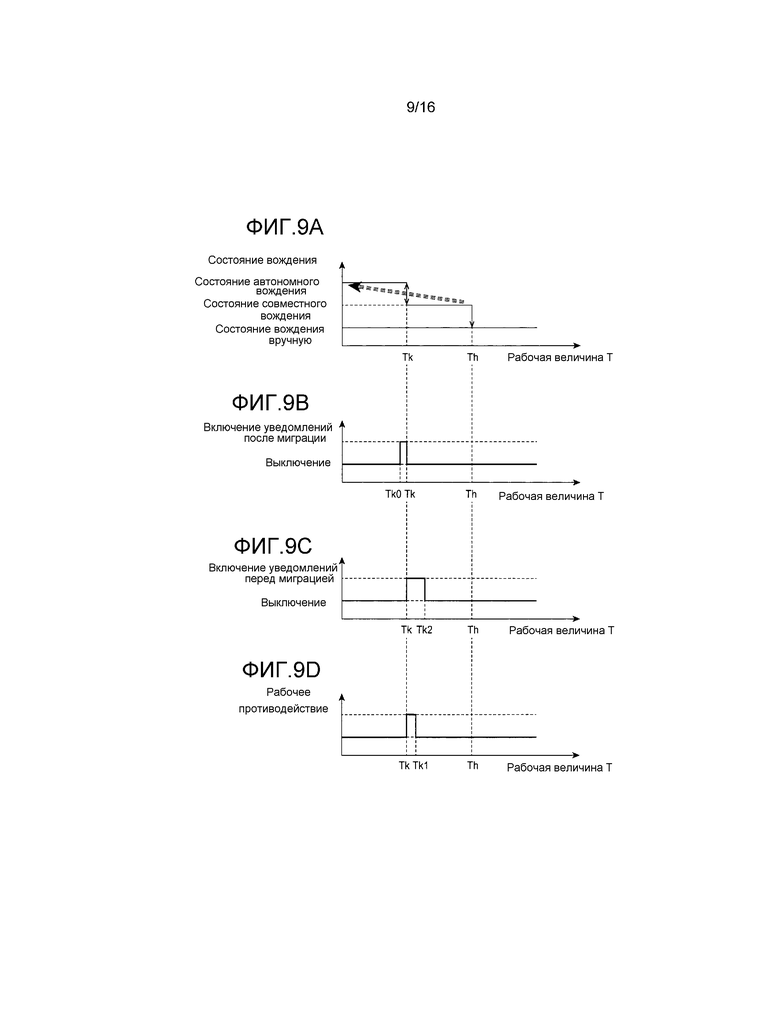
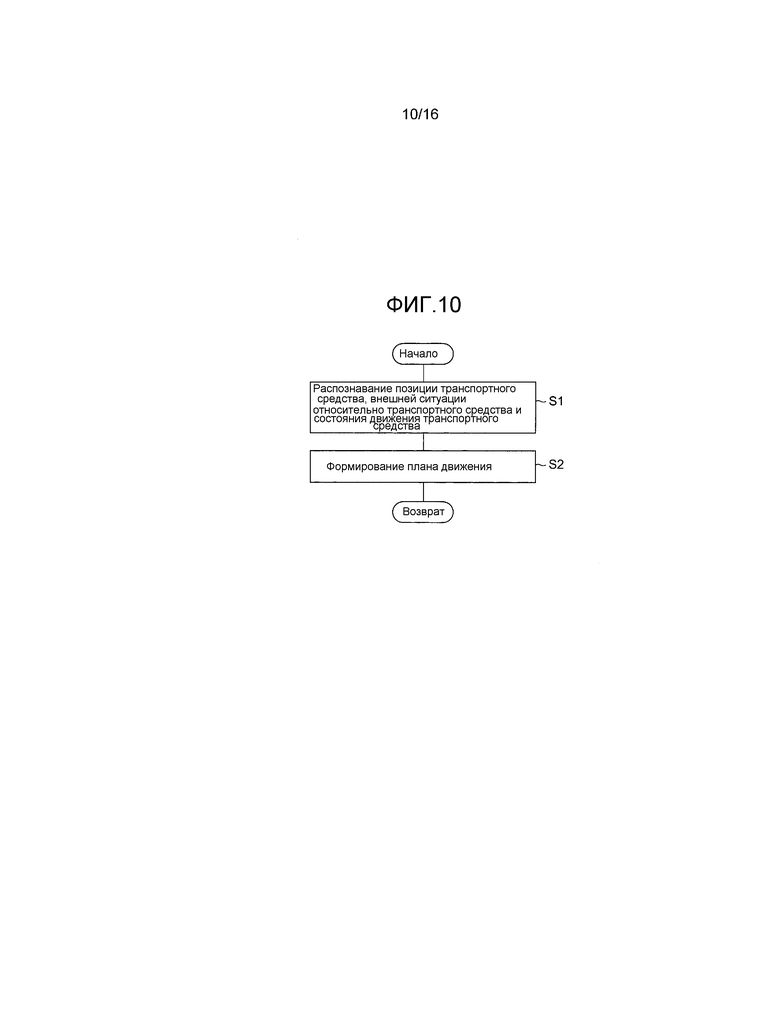
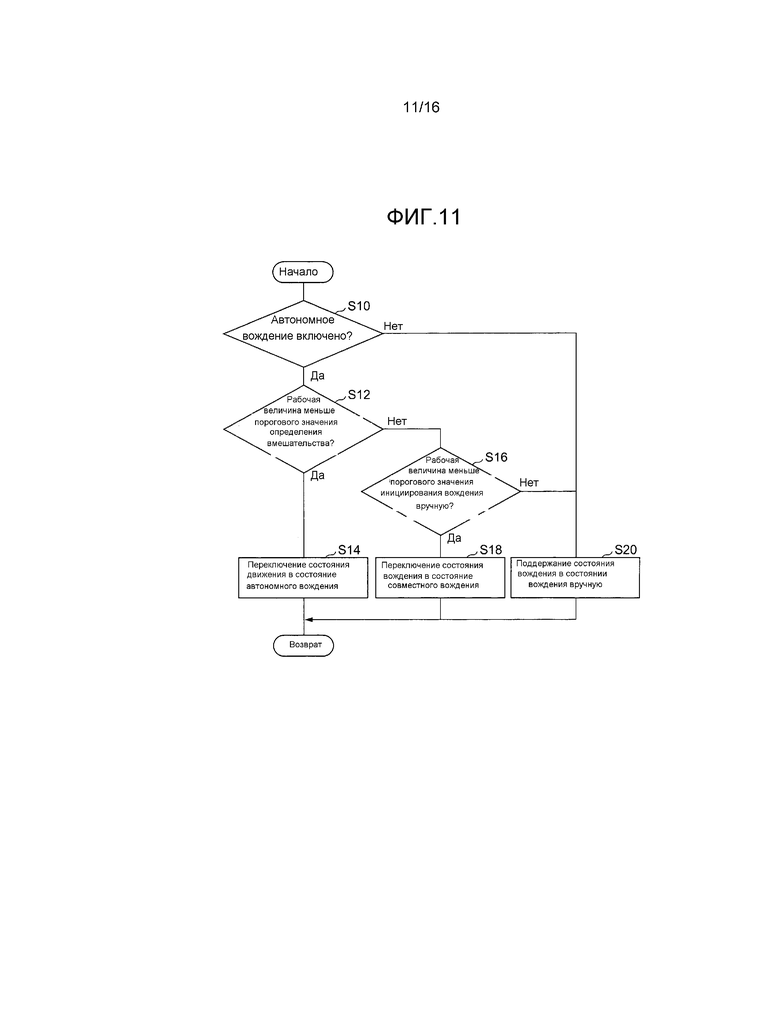
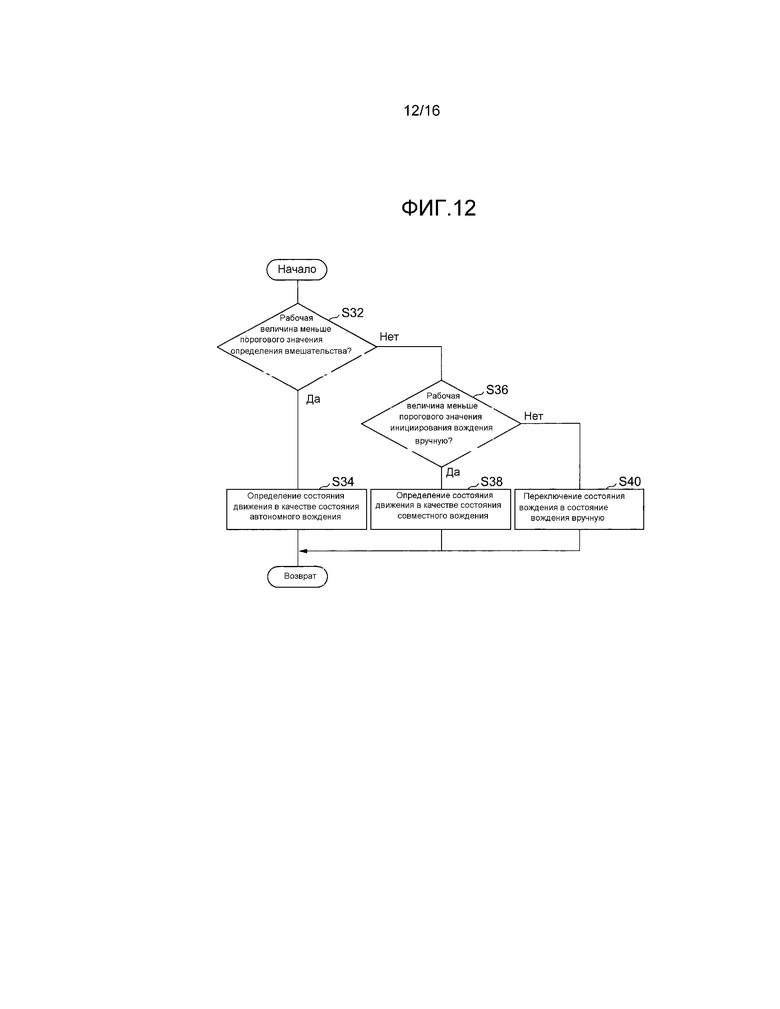
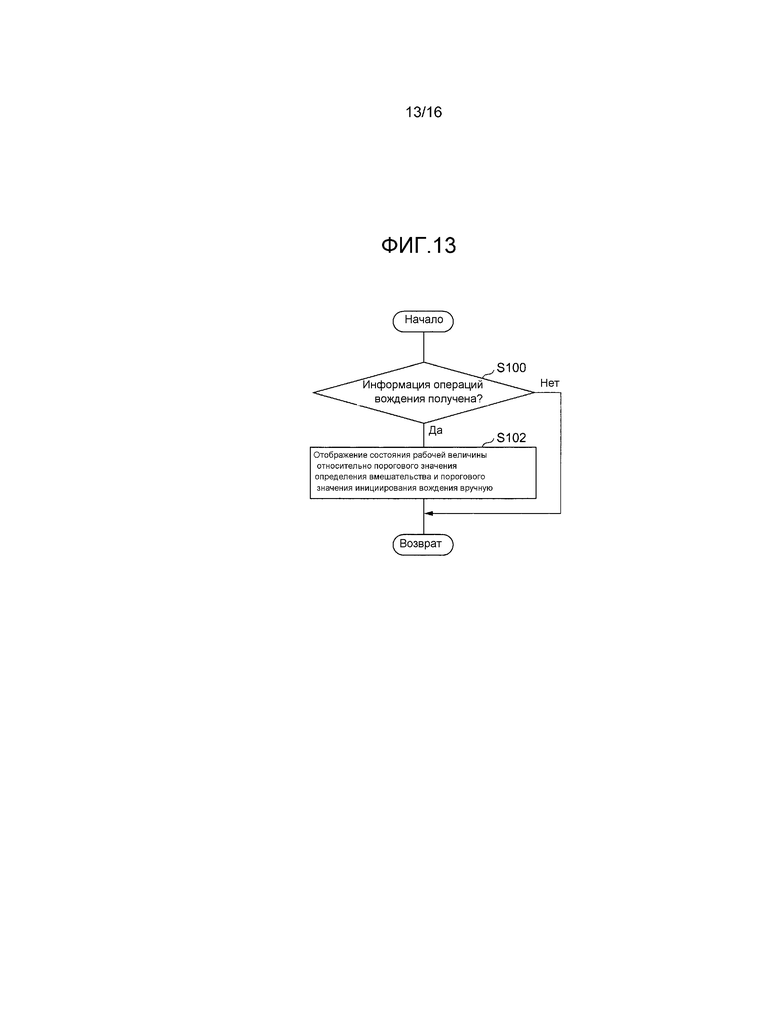
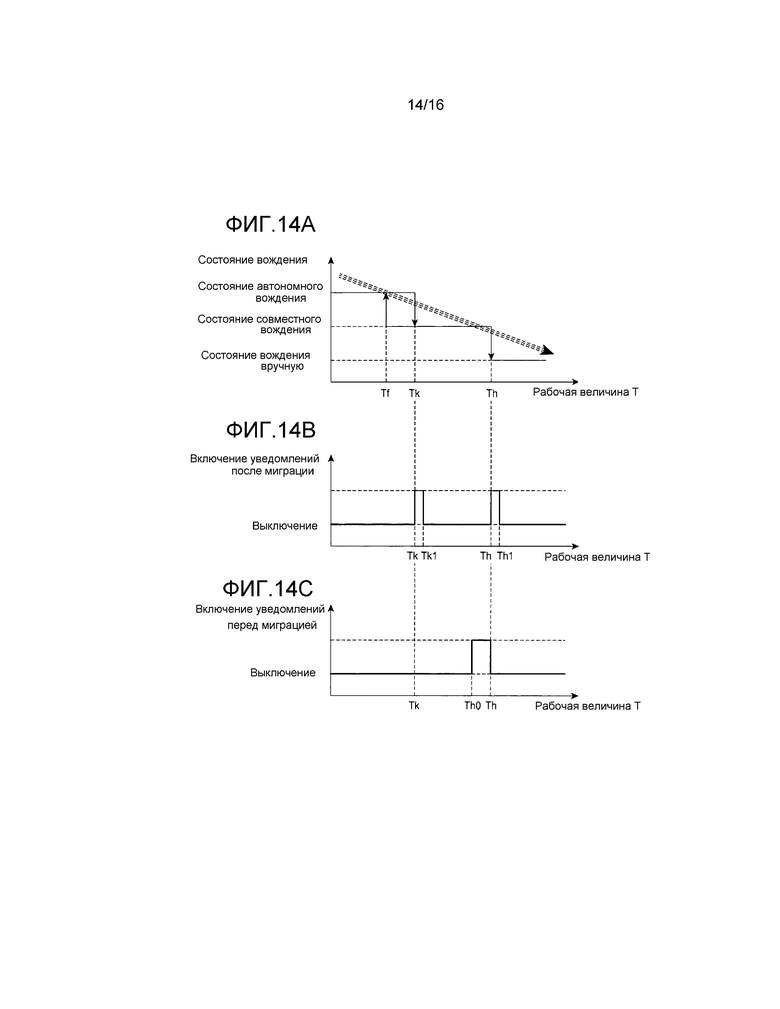

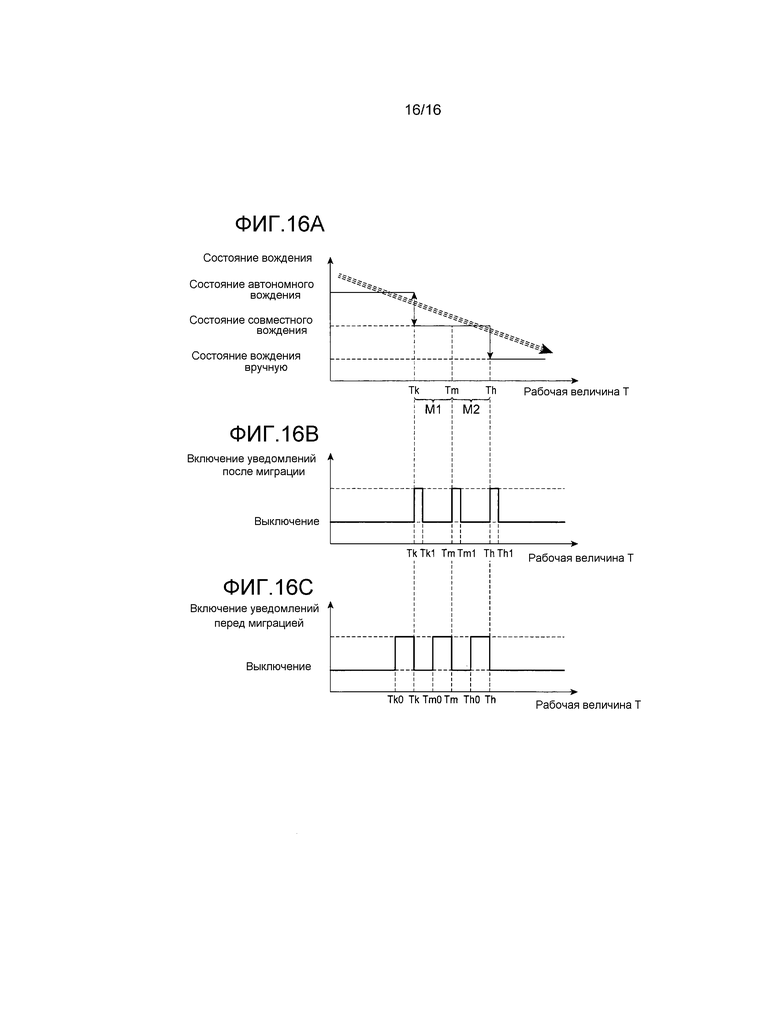
Изобретение относится к системам повышения безопасности транспортного средства. Система помощи при вождении содержит модуль получения информации операций вождения, модуль переключения состояния вождения, модуль уведомления. Модуль переключения состояния вождения переключает состояние вождения транспортного средства между первым состоянием вождения и вторым состоянием вождения на основе взаимосвязи между упомянутой рабочей величиной и первым пороговым значением. Первое состояние вождения включает в себя по меньшей мере одно из состояния автономного вождения и состояния совместного вождения. Второе состояние вождения обеспечивает возможность отражения операции вождения водителя при движении транспортного средства. Модуль уведомления информирует водителя о взаимосвязи между первым пороговым значением и состоянием упомянутой рабочей величины. Достигается повышение безопасности управления транспортным средством. 5 з.п. ф-лы, 33 ил.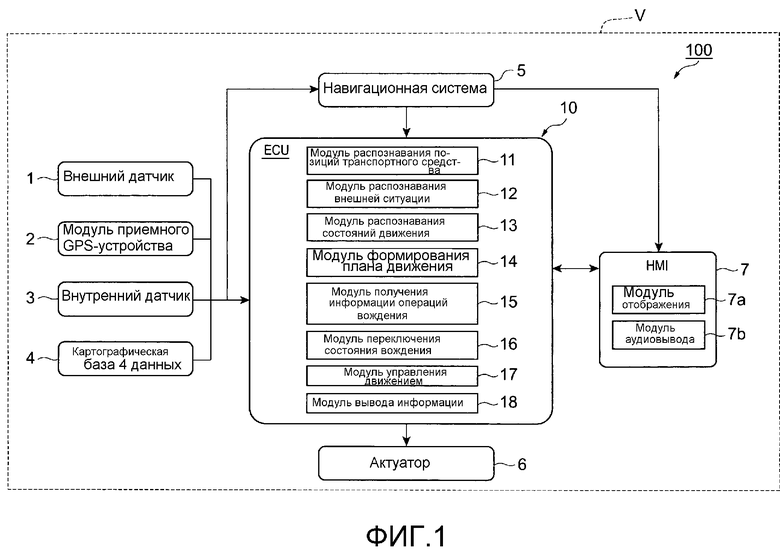
1. Система (100) помощи при вождении, отличающаяся тем, что она содержит:
модуль (15) получения информации операций вождения, получающий рабочую величину операции вождения водителя;
модуль (16) переключения состояния вождения, переключающий состояние вождения транспортного средства между первым состоянием вождения и вторым состоянием вождения на основе взаимосвязи между упомянутой рабочей величиной и первым пороговым значением,
причем первое состояние вождения включает в себя по меньшей мере одно из следующего:
состояние автономного вождения, в котором движение транспортного средства управляется посредством использования плана движения, сформированного на основе периферийной информации касательно транспортного средства и картографической информации, предоставленной заранее для транспортного средства, и
состояние совместного вождения, в котором транспортному средству разрешается двигаться с помощью управления транспортным средством на основе периферийной информации касательно транспортного средства и операции вождения водителя, действующих совместно друг с другом, и
причем второе состояние вождения обеспечивает возможность отражения операции вождения водителя при движении транспортного средства; и
модуль (7) уведомления, уведомляющий водителя о взаимосвязи между первым пороговым значением и состоянием упомянутой рабочей величины.
2. Система помощи при вождении по п. 1, отличающаяся тем, что
модуль уведомления представляет собой модуль отображения, отображающий взаимосвязь между первым пороговым значением и состоянием упомянутой рабочей величины.
3. Система помощи при вождении по п. 1, отличающаяся тем, что
упомянутая рабочая величина представляет собой по меньшей мере одно из операции руления, операции нажатия педали акселератора и операции нажатия педали тормоза транспортного средства.
4. Система помощи при вождении по п. 1, отличающаяся тем, что
модуль переключения состояния вождения переключает транспортное средство во второе состояние, когда упомянутая рабочая величина становится равной или превышающей первое пороговое значение в случае, если транспортное средство находится в первом состоянии вождения.
5. Система помощи при вождении по п. 1, отличающаяся тем, что:
модуль уведомления представляет собой модуль отображения, отображающий взаимосвязь между первым пороговым значением и состоянием упомянутой рабочей величины,
упомянутая рабочая величина представляет собой по меньшей мере одно из операции руления, операции нажатия педали акселератора и операции нажатия педали тормоза транспортного средства и
модуль переключения состояния вождения переключает транспортное средство во второе состояние, когда упомянутая рабочая величина становится равной или превышающей первое пороговое значение в случае, если транспортное средство находится в первом состоянии вождения.
6. Система помощи при вождении по п. 1, отличающаяся тем, что:
как состояние автономного вождения, так и состояние совместного вождения включены в первое состояние вождения,
модуль переключения состояния вождения:
переключает транспортное средство в состояние совместного вождения, когда упомянутая рабочая величина становится равной или превышающей второе пороговое значение и меньшей первого порогового значения в случае, если транспортное средство находится в состоянии автономного вождения,
переключает транспортное средство в состояние автономного вождения, когда упомянутая рабочая величина становится меньше второго порогового значения в случае, если транспортное средство находится в состоянии совместного вождения, и
переключает транспортное средство во второе состояние вождения, когда упомянутая рабочая величина становится равной или превышающей первое пороговое значение в случае, если состояние вождения транспортного средства представляет собой состояние совместного вождения, и
модуль уведомления уведомляет о состоянии упомянутой рабочей величины относительно первого порогового значения и второго порогового значения.
| US 2014156133 A1, 05.06.2014 | |||
| DE 102013010630 A1, 08.01.2015 | |||
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ СЕЛЬХОЗМАШИН И АВТОМАТИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2424642C2 |

