Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству определения окружения, выполненному с возможностью определять окружение вождения, с которым встречается транспортное средство, к аппаратуре содействия при движении и к способу определения окружения.
Уровень техники
[0002] Относительно этого вида устройства или аппаратуры, известна технология с использованием многомасштабного распознавания. Эта технология включает в себя вычисление набора линий разметки рассматриваемого транспортного средства и помехи, оценку риска в каждой линии разметки на основе существующих вероятностей рассматриваемого транспортного средства и помехи в точке пересечения их маршрутов и выбор действия вождения (патентный документ 1: JP2011-96105A).
Документы предшествующего уровня техники
Патентные документы
[0003] Патентный документ 1. JP2011-96105A
Сущность изобретения
Задачи, решаемые изобретением
[0004] Тем не менее, в вышеприведенном предшествующем уровне техники, создается определенное число линий разметки рассматриваемого транспортного средства и помехи, поскольку линии разметки подразделяются посредством многомасштабного распознавания, так что число объектов для обработки является достаточно большим, и к сожалению, может быть затруднительным определять действие вождения в реальном времени.
[0005] Проблема, которая должна разрешаться посредством настоящего изобретения, заключается в том, чтобы предоставлять устройство определения окружения, которое быстро определяет окружение, с которым встречается рассматриваемое транспортное средство, движущееся по маршруту.
Средство решения задач
[0006] Настоящее изобретение разрешает вышеуказанную проблему посредством извлечения множества событий, с которыми встречается рассматриваемое транспортное средство, движущееся по первому маршруту, на основе взаимосвязей между первым маршрутом, по которому движется рассматриваемое транспортное средство, и вторыми маршрутами, имеющими точки пересечений с первым маршрутом, и определения окружения с использованием взаимосвязи между каждым из извлеченных событий и рассматриваемым транспортным средством.
Преимущества изобретения
[0007] Согласно настоящему изобретению, при определении действия вождения рассматриваемого транспортного средства, извлекаются события, необходимые для определения окружения встречи, и окружение определяется с использованием взаимосвязей между извлеченными событиями и рассматриваемым транспортным средством. Соответствующее действие вождения в силу этого может определяться при уменьшении вычислительной нагрузки.
Краткое описание чертежей
[0008] Фиг. 1 является блок-схемой, иллюстрирующей систему содействия при движении согласно одному или более вариантов осуществления настоящего изобретения.
Фиг. 2A является первым видом для описания схемы определения окружения, с которым встречается рассматриваемое транспортное средство.
Фиг. 2B является вторым видом для описания схемы определения окружения, с которым встречается рассматриваемое транспортное средство.
Фиг. 2C является третьим видом для описания схемы определения окружения, с которым встречается рассматриваемое транспортное средство.
Фиг. 2D является четвертым видом для описания схемы определения окружения, с которым встречается рассматриваемое транспортное средство.
Фиг. 2E является пятым видом для описания схемы определения окружения, с которым встречается рассматриваемое транспортное средство.
Фиг. 2F является шестым видом для описания схемы определения окружения, с которым встречается рассматриваемое транспортное средство.
Фиг. 2G является седьмым видом для описания схемы определения окружения, с которым встречается рассматриваемое транспортное средство.
Фиг. 3 является видом для описания схемы определения событий с использованием правил дорожного движения.
Фиг. 4 является примером отображаемой информации, представляющей события в виде временного ряда.
Фиг. 5A является первым видом для описания схемы процесса определения для действия вождения при событиях.
Фиг. 5B является вторым видом для описания схемы процесса определения для действия вождения при событиях.
Фиг. 6 является примером отображаемой информации, представляющей результат определения действия вождения.
Фиг. 7A является первым видом для описания процесса извлечения для события.
Фиг. 7B является вторым видом для описания процесса извлечения для события.
Фиг. 8 является примером отображаемой информации, представляющей результат определения действия вождения.
Фиг. 9A является первым видом для описания процесса извлечения для событий и процесса планирования для вождения.
Фиг. 9B является вторым видом для описания процесса извлечения для событий и процесса планирования для вождения.
Фиг. 10 является примером отображаемой информации, представляющей события в виде временного ряда.
Фиг. 11A является первым видом для описания процесса извлечения для событий, включающих в себя паркующееся транспортное средство.
Фиг. 11B является вторым видом для описания процесса извлечения для событий, включающих в себя паркующееся транспортное средство.
Фиг. 12 является примером отображаемой информации, представляющей события в виде временного ряда.
Фиг. 13A является первым видом для описания схемы задания возможных вариантов позиций остановки.
Фиг. 13B является вторым видом для описания схемы задания возможных вариантов позиций остановки.
Фиг. 13C является третьим видом для описания схемы задания возможных вариантов позиций остановки.
Фиг. 13D является четвертым видом для описания схемы задания возможных вариантов позиций остановки.
Фиг. 14A является первым видом для описания схемы задания возможных вариантов позиций остановки на T-образном перекрестке.
Фиг. 14B является вторым видом для описания схемы задания возможных вариантов позиций остановки на T-образном перекрестке.
Фиг. 15 является третьим видом для описания схемы задания возможных вариантов позиций остановки в пробке.
Фиг. 16 является блок-схемой последовательности операций способа, иллюстрирующей процедуру управления в системе содействия при движении согласно одному или более вариантов осуществления настоящего изобретения.
Фиг. 17 является блок-схемой последовательности операций способа, иллюстрирующей вложенную процедуру этапа S15 процедуры управления, проиллюстрированной на фиг. 16.
Фиг. 18 является блок-схемой последовательности операций способа, иллюстрирующей вложенную процедуру этапа S23 процедуры управления, проиллюстрированной на фиг. 17.
Фиг. 19 является видом, иллюстрирующим окружение, описывающее схему извлечения событий.
Фиг. 20 является блок-схемой последовательности операций способа, иллюстрирующей процедуру управления первой схемы извлечения событий.
Фиг. 21 является первым видом для описания первой схемы извлечения событий.
Фиг. 22 является вторым видом для описания первой схемы извлечения событий.
Фиг. 23 является третьим видом для описания первой схемы извлечения событий.
Фиг. 24A является четвертым видом для описания первой схемы извлечения событий.
Фиг. 24B является пятым видом для описания первой схемы извлечения событий.
Фиг. 25 является блок-схемой последовательности операций способа, иллюстрирующей процедуру управления второй схемы извлечения событий.
Фиг. 26A является первым видом для описания второй схемы извлечения событий.
Фиг. 26B является вторым видом для описания второй схемы извлечения событий.
Фиг. 26C является третьим видом для описания второй схемы извлечения событий.
Фиг. 27A является видом, иллюстрирующим окружение, описывающее схему унификации событий.
Фиг. 27B является первым видом для описания схемы унификации событий.
Фиг. 27C является вторым видом для описания схемы унификации событий.
Фиг. 27D является четвертым видом для описания схемы унификации событий.
Фиг. 28 является видом для описания другого примера схемы унификации событий.
Фиг. 29 является видом для описания преимуществ настоящего изобретения.
Фиг. 30 является примером отображаемой информации, представляющей события окружения, проиллюстрированного на фиг. 29, в виде временного ряда.
Режим(ы) осуществления изобретения
[0009] Далее описаны один или более вариантов осуществления настоящего изобретения со ссылками на чертежи. В вариантах осуществления, настоящее изобретение описывается посредством примерной иллюстрации примеров, в которых устройство определения окружения движения согласно настоящему изобретению применяется к системе содействия при движении, оборудованной в транспортном средстве.
[0010] Фиг. 1 является схемой, иллюстрирующей блочную конфигурацию системы 1 содействия при движении согласно одному или более вариантов осуществления настоящего изобретения. Система 1 содействия при движении содержит аппаратуру 100 содействия при движении и бортовую аппаратуру 200. В настоящем изобретении, форма осуществления аппаратуры 100 содействия при движении не ограничена. Аппаратура 100 содействия при движении может быть смонтирована в транспортном средстве или также может применяться к портативным терминальным устройствам, которые могут обмениваться информацией с бортовой аппаратурой 200. Примеры таких терминальных устройств включают в себя такое оборудование, как смартфон и PDA. Система 1 содействия при движении, аппаратура 100 содействия при движении, бортовая аппаратура 200 и различные модули, предоставленные в них, могут представлять собой компьютер, который включает в себя арифметический процессор, к примеру, один или более CPU, и выполняет процессы вычисления.
[0011] Сначала описывается бортовая аппаратура 200.
Бортовая аппаратура 200 согласно одному или более вариантов осуществления настоящего изобретения содержит контроллер 210 транспортного средства, навигационное устройство 220, устройство 230 обнаружения объектов, устройство 240 недопущения выезда за пределы полосы движения и устройство 250 вывода. Эти устройства, которые составляют бортовую аппаратуру 200, соединяются друг с другом через контроллерную сеть (CAN) или другую бортовую LAN, чтобы взаимно обмениваться информацией. Бортовая аппаратура 200 может обмениваться информацией с аппаратурой 100 содействия при движении через такую бортовую LAN. Контроллер 210 транспортного средства согласно одному или более вариантов осуществления настоящего изобретения работает совместно с устройством 260 обнаружения, приводным устройством 270 и устройством 280 рулевого управления.
[0012] Контроллер 210 транспортного средства согласно одному или более вариантов осуществления настоящего изобретения содержит устройство 260 обнаружения. Устройство 260 обнаружения имеет датчик 261 угла поворота при рулении, датчик 262 скорости транспортного средства и датчик 263 ориентации. Датчик 261 угла поворота при рулении обнаруживает такую информацию, как руление, величина руления, скорость руления и ускорение при рулении, и выводит информацию в контроллер 210 транспортного средства. Датчик 262 скорости транспортного средства определяет скорость и/или ускорение транспортного средства и выводит результат определения в контроллер 210 транспортного средства. Датчик 263 ориентации обнаруживает позицию транспортного средства, угла наклона в продольном направлении транспортного средства, угол относительно вертикальной оси транспортного средства и угол крена транспортного средства и выводит их в контроллер 210 транспортного средства. Датчик 263 ориентации согласно одному или более вариантов осуществления настоящего изобретения включает в себя гиродатчик.
[0013] Контроллер 210 транспортного средства согласно одному или более вариантов осуществления настоящего изобретения представляет собой бортовой компьютер, к примеру, модуль управления двигателем/электронный модуль управления (ECU), и электронно управляет состоянием приведения в движение транспортного средства. Транспортное средство согласно одному или более вариантов осуществления настоящего изобретения может представлять собой, например, электромобиль, имеющий электромотор в качестве источника приведения в движение, автомобиль с двигателем, имеющий двигатель внутреннего сгорания в качестве источника приведения в движение, или гибридный автомобиль, имеющий как электромотор, так и двигатель внутреннего сгорания в качестве источников приведения в движение. Примеры электромобиля и гибридного автомобиля, имеющего электромотор в качестве источника приведения в движение, включают в себя тип, в котором источник мощности для электромотора представляет собой аккумуляторную батарею, и тип, в котором источник мощности для электромотора представляет собой топливный элемент.
[0014] Приводное устройство 270 согласно одному или более вариантов осуществления настоящего изобретения включает в себя приводной механизм рассматриваемого транспортного средства V. Приводной механизм включает в себя электромотор и/или двигатель внутреннего сгорания в качестве вышеописанных источников приведения в движение, устройство передачи мощности, включающее в себя ведущий вал и автоматическую трансмиссию, которые передают выходную мощность источника или источников приведения в движение на ведущие колеса, и тормозное устройство 271, которое тормозит колеса. Приводное устройство 270 формирует соответствующие управляющие сигналы для этих компонентов приводного механизма и выполняет управление движением, включающее в себя ускорение и замедление транспортного средства. Эти управляющие сигналы для приводного механизма формируются на основе входных сигналов посредством операции нажатия педали акселератора и операции нажатия педали тормоза и управляющих сигналов, полученных из контроллера 210 транспортного средства или из аппаратуры 100 содействия при движении. Управляющая информация может отправляться в приводное устройство 270, которое в силу этого может автоматически выполнять управление движением, включающее в себя ускорение и замедление транспортного средства. В случае гибридного автомобиля, приводное устройство 270 может принимать отношение крутящего момента, выводимого в электромотор, и крутящего момента, выводимого в двигатель внутреннего сгорания, в соответствии с состоянием движения транспортного средства.
[0015] Устройство 280 рулевого управления согласно одному или более вариантов осуществления настоящего изобретения включает в себя актуатор (исполнительный механизм) рулевого управления. Актуатор рулевого управления включает в себя электромотор и другие обязательные компоненты, присоединенные к валу рулевой колонки. Устройство 280 рулевого управления выполняет управление варьированием направления движения транспортного средства на основе управляющего сигнала, полученного из контроллера 210 транспортного средства, или входного сигнала посредством операции руления. Контроллер 210 транспортного средства отправляет управляющую информацию, включающую в себя величину руления, в устройство 280 рулевого управления, чтобы за счет этого выполнять управление варьированием направления движения. Помимо этого или альтернативно, аппаратура 100 содействия при движении может управлять величиной торможения для каждого колеса транспортного средства, чтобы за счет этого выполнять управление варьированием направления движения. В этом случае, контроллер 210 транспортного средства отправляет управляющую информацию, включающую в себя величину торможения для каждого колеса, в тормозное устройство 271, чтобы за счет этого выполнять управление варьированием направления движения. Управление приводным устройством 270 и/или управление устройством 280 рулевого управления может выполняться полностью автоматическим способом или в форме содействия в операции вождения (операции движения) водителем. Управление приводным устройством 270 и управление устройством 280 рулевого управления может приостанавливаться/отменяться вследствие операции вмешательства водителя. Контроллер 210 транспортного средства управляет вождением рассматриваемого транспортного средства в соответствии с планом операций вождения (программой вождения), запланированным посредством устройства 20 планирования вождения.
[0016] Бортовая аппаратура 200 согласно одному или более вариантов осуществления настоящего изобретения включает в себя навигационное устройство 220. Навигационное устройство 220 согласно одному или более вариантов осуществления настоящего изобретения вычисляет маршрут из текущей позиции рассматриваемого транспортного средства в место назначения. Известная схема на момент подачи настоящей заявки на основе алгоритма поиска по графу, такого как алгоритм Дейкстры и алгоритм A*-поиска, может использоваться в качестве схемы вычисления маршрута. Вычисленный маршрут отправляется в контроллер 210 транспортного средства, который должен использоваться для содействия при движении для рассматриваемого транспортного средства. Вычисленный маршрут выводится в качестве информации навигации на основе инструкций по маршруту через устройство 250 вывода, которое описывается ниже.
Навигационное устройство 220 включает в себя устройство 221 обнаружения позиции. Устройство 221 обнаружения позиции согласно одному или более вариантов осуществления настоящего изобретения взаимодействует с глобальной системой позиционирования (GPS) и обнаруживает позицию движения (широту и долготу) для движения транспортного средства.
[0017] Навигационное устройство 220 обладает доступной картографической информацией 222, дорожной информацией 223 и информацией 224 правил дорожного движения. Достаточно того, что картографическая информация 222, дорожная информация 223 и информация 224 правил дорожного движения могут считываться посредством навигационного устройства 220, и они могут предоставляться в качестве информационных элементов, которые физически отделены от навигационного устройства 220, или также могут сохраняться на сервере, который может считываться через средство связи.
Картографическая информация 222 согласно одному или более вариантов осуществления настоящего изобретения представляет собой так называемую электронную карту, которая представляет информацию, в которой широта и долгота ассоциированы с картографической информацией. Картографическая информация 222 имеет дорожную информацию 223, которая ассоциирована с каждой точкой.
[0018] Дорожная информация 223 согласно одному или более вариантов осуществления настоящего изобретения задается посредством узлов и соединений, соединяемых между узлами. Дорожная информация 223 включает в себя информацию, которая указывает дорогу посредством позиции/области дороги, типа дороги, ширины дороги для дороги и информации формы дороги. Дорожная информация 223 согласно одному или более вариантов осуществления настоящего изобретения сохраняется таким образом, что идентификационная информация каждого соединения дорог ассоциирована с позицией перекрестка, направлением въезда на перекресток, типом перекрестка и другой информацией относительно перекрестка. Дорожная информация 223 согласно одному или более вариантов осуществления настоящего изобретения также сохраняется таким образом, что идентификационная информация каждого соединения дорог ассоциирована с типом дороги, шириной дороги, формой дороги, тем, разрешается или нет движение прямо вперед, взаимосвязью приоритетов в движении, тем, разрешается или нет обгон (разрешается или нет смена полосы движения на смежную полосу движения), и другой связанной с дорогой информацией.
[0019] Навигационное устройство 220 указывает первый маршрут, по которому движется рассматриваемое транспортное средство, на основе текущей позиции рассматриваемого транспортного средства, обнаруженной посредством устройства 221 обнаружения позиции. Первый маршрут, по которому движется рассматриваемое транспортное средство, может указываться на каждой дороге, указываться в каждой полосе движения, входящее/исходящее направление которой указывается, указываться в каждой одиночной полосе, в которой фактически движется рассматриваемое транспортное средство, и/или указываться в каждой конечной секции. Навигационное устройство 220 согласно одному или более вариантов осуществления настоящего изобретения обращается к дорожной информации 223, которая описывается ниже, чтобы указывать соединение дорог в качестве первого маршрута, по которому движется рассматриваемое транспортное средство. Первый маршрут согласно одному или более вариантов осуществления настоящего изобретения включает в себя конкретную информацию (координатную информацию) одной или более точек, через которые рассматриваемое транспортное средство V1 проезжает в будущем. Первый маршрут включает в себя, по меньшей мере, одну точку, которая предлагает следующую позицию движения, в которую движется рассматриваемое транспортное средство. Целевой маршрут (первый маршрут) может состоять из непрерывной линии или также может состоять из дискретных точек.
[0020] Информация 224 правил дорожного движения согласно одному или более вариантов осуществления настоящего изобретения представляет правила дорожного движения, такие как "остановитесь", "парковка запрещена", "остановка запрещена", "снизьте скорость" и "ограничение скорости", которых должно придерживаться транспортное средство при движении. Каждое правило задается для каждой точки (широты, долготы) и каждого соединения. Информация 224 правил дорожного движения может включать в себя информацию относительно светофоров, которая получается из аппаратуры, предоставленной на обочине.
[0021] Бортовая аппаратура 200 согласно одному или более вариантов осуществления настоящего изобретения включает в себя устройство 230 обнаружения объектов. Устройство 230 обнаружения объектов согласно одному или более вариантов осуществления настоящего изобретения обнаруживает ситуацию рядом с рассматриваемым транспортным средством. Устройство 230 обнаружения объектов рассматриваемого транспортного средства обнаруживает наличие и существующие позиции объектов, включающих в себя помехи, которые могут существовать рядом с рассматриваемым транспортным средством. Хотя не ограничено конкретным образом, устройство 230 обнаружения объектов согласно одному или более вариантов осуществления настоящего изобретения включает в себя камеру 231. Камера 231 согласно одному или более вариантов осуществления настоящего изобретения представляет собой, например, устройство формирования изображений, содержащее элемент формирования изображений, такой как CCD. Камера 231 также может представлять собой камеру для съемки в инфракрасном диапазоне или стереокамеру. Камера 231 располагается в определенной позиции рассматриваемого транспортного средства и захватывает изображения рядом с рассматриваемым транспортным средством. Термин "рядом с рассматриваемым транспортным средством" при использовании в данном документе охватывает понятия "впереди рассматриваемого транспортного средства", "позади рассматриваемого транспортного средства", "спереди сбоку рассматриваемого транспортного средства", и "сзади сбоку рассматриваемого транспортного средства". Примеры объектов, изображения которых должны быть сформированы посредством камеры 231, включают в себя стационарные объекты, такие как дорожные знаки. Примеры объектов дополнительно включают в себя движущиеся объекты, такие как пешеходы и другие транспортные средства, к примеру, двухколесные транспортные средства и четырехколесные транспортные средства. Примеры объектов также включают в себя дорожные сооружения, такие как дорожные ограждения, центральные разделительные полосы и бордюрные камни.
[0022] Помимо этого или альтернативно, устройство 230 обнаружения объектов может анализировать данные изображений и идентифицировать тип объекта на основе результата анализа. Устройство 230 обнаружения объектов использует технологию сопоставления с шаблоном и т.п. для того, чтобы идентифицировать то, представляет собой объект, включенный в данные изображений, транспортное средство, пешехода или дорожный знак либо нет. Устройство 230 обнаружения объектов обрабатывает полученные данные изображений, чтобы получать расстояние от рассматриваемого транспортного средства до объекта, существующего рядом с рассматриваемым транспортным средством, на основе позиции объекта. В частности, устройство 230 обнаружения объектов получает позиционную взаимосвязь между объектом и рассматриваемым транспортным средством.
[0023] Помимо этого или альтернативно, устройство 230 обнаружения объектов согласно одному или более вариантов осуществления настоящего изобретения может использовать радарное устройство 232. Примеры радарного устройства 232, которое должно использоваться, включают в себя такие примеры, как радар миллиметрового диапазона, лазерный радар и сверхзвуковой радар, которые принадлежат схемам, известным на момент подачи заявки настоящей заявки. Устройство 230 обнаружения объектов обнаруживает присутствие или отсутствие объектов, позиции объектов и расстояния до объектов на основе принимаемых сигналов из радарного устройства 232. Устройство 230 обнаружения объектов может обнаруживать присутствие или отсутствие объектов, позиции объектов и расстояния до объектов на основе результатов кластеризации информации точечных групп, которую получает радарное устройство.
[0024] Когда рассматриваемое транспортное средство и другое транспортное средство допускают связь между транспортными средствами, устройство 230 обнаружения объектов может получать скорость и ускорение транспортного средства для другого транспортного средства, которые обнаруживаются посредством датчика скорости транспортного средства для другого транспортного средства, в качестве информации объектов, которая представляет то, что другое транспортное средство существует. Следует понимать, что устройство 230 обнаружения объектов также может получать информацию объектов, которая включает в себя позицию, скорость и ускорение другого транспортного средства, из внешних устройств, таких как интеллектуальные транспортные системы (ITS).
[0025] Бортовая аппаратура 200 согласно одному или более вариантов осуществления настоящего изобретения включает в себя устройство 240 недопущения выезда за пределы полосы движения. Устройство 240 недопущения выезда за пределы полосы движения включает в себя камеру 241 и информацию 242 дороги. Камера 231 устройства обнаружения объектов может совместно использоваться в качестве камеры 241. Дорожная информация 223 навигационного устройства может совместно использоваться в качестве информации 242 дороги. Устройство 240 недопущения выезда за пределы полосы движения обнаруживает полосу движения, в которой движется рассматриваемое транспортное средство, для первого маршрута из изображений, захваченных посредством камеры 241. Устройство 240 недопущения выезда за пределы полосы движения имеет функцию недопущения выезда за пределы полосы движения (функцию содействия для удержания на полосе движения), чтобы распознавать первую полосу движения, в которой движется рассматриваемое транспортное средство, и управляет поведением при передвижении рассматриваемого транспортного средства таким образом, чтобы сохранять определенную взаимосвязь между позицией разделительной линии полосы движения и позицией рассматриваемого транспортного средства. Аппаратура 100 содействия при движении согласно одному или более вариантов осуществления настоящего изобретения управляет поведением при передвижении рассматриваемого транспортного средства таким образом, что рассматриваемое транспортное средство движется по центру полосы движения. Помимо этого или альтернативно, аппаратура 100 содействия при движении может управлять поведением при передвижении рассматриваемого транспортного средства таким образом, что расстояние от разделительной линии полосы движения до рассматриваемого транспортного средства в направлении ширины дороги попадает в предварительно определенный диапазон. Разделительная линия в одном или более вариантов осуществления настоящего изобретения не ограничена при условии, что она имеет функцию для того, чтобы задавать полосу движения. Разделительная линия может представлять собой линию, проведенную на поверхности дороги, насаждения, которые присутствуют между полосами движения, или дорожное сооружение, которое присутствует на стороне обочины дороги по отношению к полосе движения, такое как дорожное ограждение, бордюрный камень, тротуар и дорога с ограниченным доступом для двух колес. Разделительная линия также может представлять собой фиксированную конструкцию, которая присутствует на стороне обочины дороги по отношению к полосе движения, такую как рекламный модуль, дорожный знак, магазин и придорожное дерево.
Процессор 11 определения, который описывается ниже, сохраняет объект, обнаруженный посредством устройства 230 обнаружения объектов, так что обнаруженный объект ассоциирован с маршрутом. Другими словами, процессор 11 определения имеет информацию в отношении того, на каком маршруте существует объект.
[0026] Бортовая аппаратура 200 согласно одному или более вариантов осуществления настоящего изобретения включает в себя устройство 250 вывода. Устройство 250 вывода включает в себя дисплей 251 и динамик 252. Устройство 250 вывода согласно одному или более вариантов осуществления настоящего изобретения выводит различные информационные элементы относительно содействия при движении пользователю или пассажирам окружающих транспортных средств. В одном или более вариантов осуществления настоящего изобретения, устройство 250 вывода выводит информацию относительно запланированного (определенного) плана действий/операций вождения и управления движением на основе плана действий вождения. Устройство 250 вывода предварительно информирует пассажиров рассматриваемого транспортного средства в отношении того, что операция руления и/или ускорение или замедление должны выполняться, через дисплей 251 и/или динамик 252, в качестве информации в соответствии с управляющей информацией для движения рассматриваемого транспортного средства по первому маршруту (целевому маршруту). Помимо этого или альтернативно, пассажиры рассматриваемого транспортного средства или пассажиры других транспортных средств могут заранее информироваться в отношении таких информационных элементов относительно содействия при движении через внешние лампы и/или внутренние лампы. Помимо этого или альтернативно, устройство 250 вывода согласно одному или более вариантов осуществления настоящего изобретения может выводить различные информационные элементы относительно содействия при движении во внешние устройства, такие как интеллектуальные транспортные системы (ITS), через устройство связи.
[0027] Далее описывается аппаратура 100 содействия при движении.
Аппаратура 100 содействия при движении согласно одному или более вариантов осуществления настоящего изобретения включает в себя устройство 10 определения окружения, устройство 20 планирования вождения и устройство 30 вывода. Устройство 30 вывода служит идентично вышеописанному устройству 250 вывода бортовой аппаратуры 200. Компоненты, сравнимые с дисплеем 251 и динамиком 252, могут использоваться в качестве компонентов устройства 30 вывода. Эти устройства могут обмениваться информацией друг с другом через линии проводной или беспроводной связи.
[0028] Сначала описывается устройство 10 определения окружения.
Устройство 10 определения окружения включает в себя процессор 11 определения, который служит в качестве устройства управления устройства 10 определения окружения. Процессор 11 определения представляет собой вычислительное устройство, которое используется, при определении действия вождения рассматриваемого транспортного средства, для того, чтобы определять окружение, с которым встречается рассматриваемое транспортное средство, движущееся по маршруту. В частности, процессор 11 определения представляет собой компьютер, содержащий постоянное запоминающее устройство (ROM), которое сохраняет программы для выполнения процесса, чтобы определять окружение, с которым встречается рассматриваемое транспортное средство, центральный процессор (CPU) в качестве функциональной схемы, которая выполняет программы, сохраненные в ROM, так что он служит в качестве устройства 10 определения окружения, и оперативное запоминающее устройство (RAM), которое служит в качестве доступного устройства хранения данных. Процессор 11 определения содержит носитель хранения данных, который сохраняет программы для выполнения процесса, чтобы определять окружение, с которым встречается рассматриваемое транспортное средство.
[0029] Процессор 11 определения устройства 10 определения окружения согласно одному или более вариантов осуществления настоящего изобретения выполняет следующие процессы:
(1) процесс извлечения одного или более вторых маршрутов, имеющих точки пересечений с первым маршрутом, по которому движется рассматриваемое транспортное средство (процесс извлечения маршрутов);
(2) процесс извлечения множества событий, с которыми встречается рассматриваемое транспортное средство, движущееся по первому маршруту, на основе взаимосвязи между первым маршрутом и каждым вторым маршрутом (процесс извлечения событий); и
(3) процесс определения окружения с использованием взаимосвязи между каждым извлеченным событием и рассматриваемым транспортным средством (процесс определения).
[0030] Процессор 11 определения согласно одному или более вариантов осуществления настоящего изобретения имеет первый блок, который реализует функцию извлечения маршрутов, второй блок, который реализует функцию извлечения событий, и третий блок, который реализует функцию определения окружения. Первый блок выполняет процесс извлечения маршрутов, второй блок выполняет процесс извлечения событий, и третий блок выполняет процесс определения. Процессор 11 определения согласно одному или более вариантов осуществления настоящего изобретения выполняет каждую из вышеуказанных функций посредством взаимодействия программного обеспечения для реализации каждой функции или выполнения каждого процесса и вышеописанных аппаратных средств.
[0031] Ниже описывается каждый процесс, выполняемый посредством процессора 11 определения согласно одному или более вариантов осуществления настоящего изобретения, со ссылкой на фиг. 2A-2G.
Сначала описывается процесс извлечения маршрутов, выполняемый посредством процессора 11 определения.
[0032] Процессор 11 определения согласно одному или более вариантов осуществления настоящего изобретения вычисляет первый маршрут, по которому движется или планирует двигаться рассматриваемое транспортное средство. Чтобы вычислять первый маршрут, процессор 11 определения получает информацию рассматриваемого транспортного средства. Процессор 11 определения получает текущую позицию рассматриваемого транспортного средства из устройства 221 обнаружения позиции. Процессор 11 определения обращается к картографической информации 222, чтобы вычислять первый маршрут с использованием полученной текущей позиции и направления движения. Помимо этого или альтернативно, процессор 11 определения может получать запланированный маршрут движения для рассматриваемого транспортного средства, который получается посредством навигационного устройства 220, в качестве первого маршрута. Помимо этого или альтернативно, процессор 11 определения может получать маршрут на основе инструкций по навигации от текущей позиции до места назначения, который получается посредством навигационного устройства 220, в качестве первого маршрута.
[0033] Процессор 11 определения согласно одному или более вариантов осуществления настоящего изобретения извлекает один или более вторых маршрутов, имеющих точки пересечений с первым маршрутом, по которому движется или планирует двигаться рассматриваемое транспортное средство. Вторые маршруты в одном или более вариантов осуществления настоящего изобретения представляют собой маршруты, имеющие точки пересечений с первым маршрутом. Примеры таких маршрутов, имеющих точки пересечений с первым маршрутом, включают в себя маршрут, который пересекается с первым маршрутом, маршрут, который сливается с первым маршрутом, маршрут, который ответвляется от первого маршрута, и другие формы пересечений с первым маршрутом.
[0034] Процессор 11 определения определяет то, встречается или нет рассматриваемое транспортное средство V1 с окружением, которое должно определяться.
В частности, процессор 11 определения определяет то, встречается или нет рассматриваемое транспортное средство V1 с окружением, в котором первый маршрут, по которому движется рассматриваемое транспортное средство V1, пересекается с другим маршрутом в качестве второго маршрута.
[0035] Окружение, проиллюстрированное на фиг. 2A, приводится в качестве примера для описания. В этом окружении, рассматриваемое транспортное средство V1 движется по первому маршруту M1L в текущий момент времени. Процессор 11 определения обращается к информации соединений картографической информации 222 или дорожной информации 223, чтобы извлекать первый маршрут M1L, включающий в себя соединение, которому принадлежит текущая позиция, полученная из устройства 221 обнаружения позиции. Первый маршрут M1L представляет собой маршрут, которому принадлежит текущая позиция рассматриваемого транспортного средства V1. Первый маршрут M1L идентифицируется посредством идентификатора соединения, заданного в картографической информации 222 или в дорожной информации 223. Первый маршрут M1L, который включает в себя текущую позицию рассматриваемого транспортного средства V1, указывается в качестве первого маршрута, по которому движется рассматриваемое транспортное средство V1.
[0036] Процессор 11 определения вычисляет первый маршрут, по которому планирует двигаться рассматриваемое транспортное средство V1.
Фиг. 2B иллюстрирует определение первого маршрута BV1L, по которому планирует двигаться рассматриваемое транспортное средство V1. Процессор 11 определения может определять первый маршрут BV1L из информации маршрута в месте назначения, вычисленной посредством навигационного устройства 220, и также может определять первый маршрут BV1L из сигнала указателя поворота, который представляет намерение левого поворота рассматриваемого транспортного средства V1. Сигнал указателя поворота получается через контроллер 210 транспортного средства.
[0037] Фиг. 2C является видом, иллюстрирующим пример перекрестка, который ассоциирован с первым маршрутом BV1L. Фиг. 2C иллюстрирует все возможные маршруты, по которым могут двигаться транспортные средства, движущиеся в соответствующих полосах движения, перекрывающимся способом. Как проиллюстрировано на фиг. 2C, другое транспортное средство V2 имеет три возможных маршрута движения в виде движения по прямой и поворота направо и налево, еще одно другое транспортное средство V3 имеет три возможных маршрута движения в виде движения по прямой и поворота направо и налево, и еще одно другое транспортное средство V4 имеет три возможных маршрута движения в виде движения по прямой и поворота направо и налево. При движении по первому маршруту BV1L транспортное средство V1 должно выполнять определение в отношении информации относительно всех возможных маршрутов, проиллюстрированных на фиг. 2C.
[0038] Процессор 11 определения согласно одному или более вариантов осуществления настоящего изобретения извлекает вторые маршруты, имеющие точки пересечений с первым маршрутом BV1L. Примеры вторых маршрутов в одном или более вариантов осуществления настоящего изобретения включают в себя маршрут, который пересекается с первым маршрутом, маршрут, который примыкает к первому маршруту (T-образный перекресток), маршрут, который сливается с первым маршрутом, и маршрут, который проходит через область, соединенную с первым маршрутом.
[0039] Ниже описывается схема извлечения вторых маршрутов. Эта схема выполняется посредством процессора 11 определения согласно одному или более вариантов осуществления настоящего изобретения.
Во-первых, процессор 11 определения согласно одному или более вариантов осуществления настоящего изобретения указывает/определяет область "окружения, с которым встречается рассматриваемое транспортное средство", которое должно определяться при определении действия вождения рассматриваемого транспортного средства. Когда имеется второй маршрут, которому принадлежит соединение, имеющее точку пересечения с первым маршрутом M1L, процессор 11 определения оценивает то, что рассматриваемое транспортное средство V1 должно встречаться с окружением, которое должно определяться. В примере, процессор 11 определения указывает окружение, в котором текущая позиция рассматриваемого транспортного средства V1 принадлежит области R1 в пределах предварительно определенного расстояния от точки пересечения (например, центра R0 перекрестка по фиг. 2A) между первым маршрутом M1L и вторым маршрутом, в качестве окружения, которое должно определяться.
[0040] Процессор 11 определения выполняет извлечение вторых маршрутов, когда рассматриваемое транспортное средство V1 встречается с окружением, которое должно определяться. Процессор 11 определения выполняет извлечение вторых маршрутов, которые существуют в области (R1 по фиг. 2A), соответствующей окружению, которое должно определяться, с которым встречается рассматриваемое транспортное средство V1. Таким образом, посредством извлечения вторых маршрутов в каждом окружении, которое должно определяться/оцениваться, и определения/оценки окружения, определение/оценка может выполняться в отношении того, в каком состоянии находится окружение, с которым встречается рассматриваемое транспортное средство, без увеличения нагрузки по обработке.
[0041] Ниже описывается схема извлечения вторых маршрутов в окружении, проиллюстрированном на фиг. 2B, со ссылкой на фиг. 2D-2G. Во-первых, как проиллюстрировано на фиг. 2D, процессор 11 определения согласно одному или более вариантов осуществления настоящего изобретения определяет возможные маршруты, по которым может двигаться другое транспортное средство V2. Процессор 11 определения использует картографическую информацию 222, дорожную информацию 223, информацию правил дорожного движения и изображения, захваченные посредством камеры 231, чтобы вычислять возможные маршруты, по которым может двигаться другое транспортное средство V2 (то же применимо к другим транспортным средствам V3 и V4).
[0042] Как проиллюстрировано на фиг. 2D, другое транспортное средство V2 имеет возможности продвижения вперед ко второму маршруту BV2S, чтобы двигаться по прямой, второму маршруту BV2L, чтобы поворачивать налево, и второму маршруту BV2R, чтобы поворачивать направо. Как проиллюстрировано на фиг. 2E, еще одно другое транспортное средство V3 имеет возможности продвижения вперед ко второму маршруту BV3S, чтобы двигаться по прямой, второму маршруту BV3L, чтобы поворачивать налево, и второму маршруту BV3R, чтобы поворачивать направо. Как проиллюстрировано на фиг. 2F, еще одно другое транспортное средство V4 имеет возможности продвижения вперед ко второму маршруту BV4S, чтобы двигаться по прямой, второму маршруту BV4L, чтобы поворачивать налево, и второму маршруту BV4R , чтобы поворачивать направо. Таким образом, три маршрута существуют в качестве маршрутов, по которым может двигаться каждое из других транспортных средств.
[0043] Процессор 11 определения согласно одному или более вариантов осуществления настоящего изобретения сужает все вышеуказанные маршруты (все маршруты, по которым могут двигаться другие транспортные средства) до возможных маршрутов, которые могут пересекаться с первым маршрутом BV1L для рассматриваемого транспортного средства V1. Как проиллюстрировано на фиг. 2G, процессор 11 определения извлекает точки QV12 и QV13 пересечений между первым маршрутом BV1L, по которому планирует двигаться рассматриваемое транспортное средство V1, и другими маршрутами. Процессор 11 определения затем извлекает второй маршрут BV2S, который совместно использует точку QV12 пересечения с первым маршрутом BV1L, и второй маршрут BV3R, который совместно использует точку QV13 пересечения с первым маршрутом BV1L. Посредством этого процесса, процессор 11 определения извлекает два вторых маршрута BV2S и BV3R, имеющие точки пересечений с первым маршрутом BV1L, из числа девяти маршрутов, существующих в окружении, с которым встречается рассматриваемое транспортное средство V1 (в окружении проезда через перекресток). Извлеченные вторые маршруты BV2S и BV3R имеют точки пересечений с первым маршрутом BV1L и с большой вероятностью должны составлять окружение, с которым встречается рассматриваемое транспортное средство V1. В силу этого можно разбирать число маршрутов, связанных с первым маршрутом, по которому движется рассматриваемое транспортное средство V1, и извлекать, из их числа, только вторые маршруты, которые должны учитываться при составлении/определении плана операций вождения для рассматриваемого транспортного средства V1.
[0044] Процессор 11 определения согласно одному или более вариантов осуществления настоящего изобретения извлекает множество событий, с которыми встречается рассматриваемое транспортное средство V1, движущееся по первому маршруту BV1L, на основе взаимосвязей между первым маршрутом BV1L и вторыми маршрутами BV2S и BV3R. События, с которыми сталкивается рассматриваемое транспортное средство V1, означают происшествия, случаи и окружения, которые возникают в рассматриваемом транспортном средстве V1, такие как проезд рассматриваемого транспортного средства V1 через точку пересечения между первым маршрутом и вторым маршрутом, въезд рассматриваемого транспортного средства V1 во второй маршрут из первого маршрута, приближение рассматриваемого транспортного средства V1 к другому транспортному средству V2, V3, V4 и объезд друг друга для рассматриваемого транспортного средства V1 относительно другого транспортного средства V2, V3, V4. Событие может выражаться как местоположение, в котором рассматриваемое транспортное средство встречается с происшествием. В силу этого, в настоящем описании, "событие" может описываться посредством указания события посредством позиционной информации точки, перекрестка, точки пересечения и т.п.
[0045] Процессор 11 определения согласно одному или более вариантов осуществления настоящего изобретения определяет точки, соответствующие точкам QV12 и QV13 пересечений между первым маршрутом BV1L, по которому планирует двигаться рассматриваемое транспортное средство V1, и вторыми маршрутами BV2S и BV3R, в качестве точек, в которых рассматриваемое транспортное средство V1, движущееся по первому маршруту BV1L, встречается с событиями. Процессор 11 определения позиционирует точки QV12 и QV13 пересечений между первым маршрутом BV1L и вторыми маршрутами BV2S и BV3R в качестве событий, с которыми встречается рассматриваемое транспортное средство V1. В точках QV12 и QV13 пересечений, рассматриваемое транспортное средство V1 встречается с событиями въезда (слияния) во вторые маршруты BV2S и BV3R. Рассматриваемое транспортное средство V1 встречается с событиями приближения к другим транспортным средствам V2, V3 и V4. Таким образом, местоположения встреч с событиями извлекаются из взаимосвязей между первым маршрутом и вторыми маршрутами, и в силу этого можно учитывать только события, которые влияют на план операций вождения для рассматриваемого транспортного средства V1.
[0046] Процессор 11 определения согласно одному или более вариантов осуществления настоящего изобретения обращается к информации 224 правил дорожного движения, чтобы извлекать события, с которыми встречается рассматриваемое транспортное средство V1, движущееся по первому маршруту, с использованием взаимосвязи, извлекаемой из правила дорожного движения на первом маршруте и правила дорожного движения на каждом втором маршруте. Информация 224 правил дорожного движения является информацией, в которой такая информация, как позиция остановки, запрет на въезд и одностороннее движение, ассоциирована с соединениями (маршрутами) и/или позиционной информацией. Этот процесс может обращаться к картографической информации 222 и/или дорожной информации 223.
Процессор 11 определения распознает правило дорожного движения в виде остановки в качестве события. Процессор 11 определения извлекает позицию, в которой действует правило остановки, в качестве позиции, в которой рассматриваемое транспортное средство V1 встречается с событием. Извлеченные позиции событий ассоциированы с маршрутами (включающими в себя соединения). Аналогично, процессор 11 определения распознает правило дорожного движения запрета на въезд в качестве события. Процессор 11 определения извлекает расположенную еще раньше по потоку позицию (расположенную раньше по потоку сторону в направлении движения), чем позиция, в которой действует правило запрета на въезд, в качестве позиции, в которой рассматриваемое транспортное средство V1 встречается с событием. Извлеченные позиции событий ассоциированы с маршрутами (включающими в себя соединения). Процессор 11 определения извлекает расположенную еще раньше по потоку позицию (расположенную раньше по потоку сторону в направлении движения), чем такая область, как центральная часть перекрестка (область R2 по фиг. 2A), в которой действуют правила запрета остановки, в качестве позиции, в которой рассматриваемое транспортное средство V1 встречается с событием. Извлеченные позиции событий ассоциированы с маршрутами (включающими в себя соединения).
[0047] Процессор 11 определения согласно одному или более вариантов осуществления настоящего изобретения вычисляет уровень приоритета первого маршрута относительно второго маршрута из информации 224 правил дорожного движения первого маршрута и второго маршрута и использует уровень приоритета, чтобы извлекать события для рассматриваемого транспортного средства V1, движущегося по первому маршруту.
[0048] В окружении, проиллюстрированном на фиг. 3, процессор 11 определения согласно одному или более вариантов осуществления настоящего изобретения обращается к информации 224 правил дорожного движения, чтобы извлекать стоп-линию ST1 на первом маршруте BV1L. Аналогично, процессор 11 определения извлекает стоп-линию ST2 на втором маршруте BV2S и стоп-линию ST3 на втором маршруте BV3R. Процессор 11 определения сравнивает правило остановки на стоп-линии ST2 на втором маршруте BV2S, который, согласно оценке, пересекается с первым маршрутом BV1L в точке QV12 пересечения, и правило остановки на стоп-линии ST1 на первом маршруте BV1L и определяет взаимосвязь между ними. Если движение через любую из стоп-линий предпочтительно разрешается в то время, когда движение через другую запрещается, стоп-линия, через которую предпочтительно разрешается движение, удаляется из возможных вариантов для событий. Это обусловлено тем, что, например, при трафике, в котором движение по второму маршруту запрещается в то время, когда движение по первому маршруту предпочтительно разрешается, другое транспортное средство V2, движущееся по второму маршруту, не влияет на движение рассматриваемого транспортного средства V1, движущегося по первому маршруту. В примере, проиллюстрированном на фиг. 3, как правило остановки на стоп-линии ST1 на первом маршруте BV1L, так и правило остановки на стоп-линии ST2 на втором маршруте BV2S требуют остановки на стоп-линиях без исключения. Процессор 11 определения не может определять уровни приоритета первого маршрута BV1L и второго маршрута BV2S. Точка QV12 пересечения в силу этого не удаляется из возможных вариантов для событий.
[0049] Процессор 11 определения согласно одному или более вариантов осуществления настоящего изобретения вычисляет уровень приоритета первого маршрута относительно второго маршрута из информации светофоров, включенной в информацию 224 правил дорожного движения для первого маршрута и второго маршрута, и использует уровень приоритета, чтобы извлекать события для рассматриваемого транспортного средства V1, движущегося по первому маршруту. Информация светофоров является информацией, которая последовательно обновляется, и в силу этого может распознаваться с использованием изображений, захваченных посредством камер 231 и 241, и также может получаться через ITS. В этом примере, описывается форма получения информации светофоров через устройство хранения данных навигационного устройства 220, но процессор 11 определения может непосредственно получать информацию светофоров.
[0050] В окружении, проиллюстрированном на фиг. 3, процессор 11 определения согласно одному или более вариантов осуществления настоящего изобретения обращается к информации 224 правил дорожного движения, чтобы извлекать светофор, показанный посредством светофора SG1, который располагается вдоль первого маршрута BV1L. Аналогично, процессор 11 определения извлекает светофор, показанный посредством светофора SG2, который располагается вдоль второго маршрута BV2S.
[0051] Процессор 11 определения согласно одному или более вариантов осуществления настоящего изобретения задает уровень приоритета маршрута, на котором разрешается движение (зеленый свет), равным относительно более высокому уровню, чем уровень приоритета маршрута, на котором требуется остановка (движение запрещается: красный свет). Если движение разрешается на обоих из двух маршрутов, имеющих точку пересечения, уровни приоритета не могут получаться, в силу чего задание уровней приоритета не выполняется. Следует понимать, что зеленый свет означает разрешение продвижения вперед, и это также может отображаться посредством другого цвета.
[0052] Когда светофор SG1, расположенный в точке QV12 пересечения на первом маршруте BV1L, показывает зеленый свет, тогда как светофор SG2, расположенный вдоль второго маршрута BV2S, показывает красный свет, процессор 11 определения определяет то, что движение по первому маршруту BV1L имеет приоритет по сравнению с движением по второму маршруту BV2S. Точка QV12 пересечения со вторым маршрутом BV2S, по которому запрещается движение, удаляется из возможных вариантов для событий.
[0053] Когда светофор SG1, расположенный в точке QV12 пересечения на первом маршруте BV1L, показывает зеленый свет, тогда как светофор SG2, расположенный вдоль второго маршрута BV2S, также показывает зеленый свет, движение разрешается как по первому маршруту BV1L, так и по второму маршруту BV2S. Процессор 11 определения не может определять уровни приоритета первого маршрута BV1L и второго маршрута BV2S в этой ситуации. Точка QV12 пересечения в силу этого не удаляется из возможных вариантов для событий.
[0054] Процессор 11 определения согласно одному или более вариантов осуществления настоящего изобретения вычисляет уровень приоритета первого маршрута относительно второго маршрута из дорожной информации 223 первого маршрута и второго маршрута и использует уровень приоритета, чтобы извлекать события для рассматриваемого транспортного средства V1, движущегося по первому маршруту. Дорожная информация 223 сохраняется с идентификацией между приоритетным маршрутом (полосой движения) и неприоритетным маршрутом (полосой движения) на T-образном перекрестке, идентификацией между приоритетным маршрутом (полосой движения) и неприоритетным маршрутом (полосой движения) в соответствии с ширинами полос движения и идентификацией между приоритетным маршрутом (полосой движения) и неприоритетным маршрутом (полосой движения) в соответствии с формами дорог. Относительно маршрутов, которые составляют T-образный перекресток, дорожная информация 223 задает один из маршрутов в качестве приоритетного маршрута, а другой - в качестве неприоритетного маршрута. Относительно маршрутов, которые имеют точку пересечения, дорожная информация 223 задает один из маршрутов, имеющий большую ширину полосы движения, в качестве приоритетного маршрута, и другой, имеющий меньшую ширину полосы движения, - в качестве неприоритетного маршрута. Следует понимать, что маршрут, имеющий меньшую ширину полосы движения, может задаваться как приоритетный маршрут в соответствии с фактическим состоянием движения. Относительно маршрутов, которые сливаются друг с другом, дорожная информация 223 задает основной маршрут в качестве приоритетного маршрута и сливающийся маршрут в качестве неприоритетного маршрута. Дорожная информация 223 задает маршрут, имеющий радиус с относительно большой кривизной, в качестве приоритетного маршрута, и маршрут, имеющий радиус с относительно небольшой кривизной, -в качестве неприоритетного маршрута. Следует понимать, что маршрут, имеющий радиус с относительно небольшой кривизной, может задаваться как приоритетный маршрут в соответствии с фактическим состоянием движения.
[0055] Процессор 11 определения согласно одному или более вариантов осуществления настоящего изобретения использует информацию по обнаружению объектов, существующих рядом с рассматриваемым транспортным средством V1, чтобы извлекать события, с которыми встречается рассматриваемое транспортное средство V1, движущееся по первому маршруту. Процессор 11 определения распознает ситуации, в которых существуют объекты (включающие в себя пешеходов, другие транспортные средства и дорожные сооружения), обнаруженные посредством устройства 230 обнаружения объектов, в качестве событий, с которыми встречается рассматриваемое транспортное средство V1. Когда расстояние между рассматриваемым транспортным средством V1 и обнаруженным объектом меньше предварительно определенного значения, процессор 11 определения может извлекать наличие объекта в качестве события. Помимо этого или альтернативно, когда оцененное время, остающееся для вхождения в контакт рассматриваемого транспортного средства V1 с обнаруженным объектом, меньше предварительно определенного значения, процессор 11 определения может извлекать наличие объекта в качестве события.
[0056] Процессор 11 определения согласно одному или более вариантов осуществления настоящего изобретения использует позиционную информацию объектов, чтобы извлекать события, с которыми встречается рассматриваемое транспортное средство V1, движущееся по первому маршруту. Примеры объектов включают в себя объекты, которые связаны с временными правилами дорожного движения, такие как стройплощадки, неисправные транспортные средства и области для объезда. Информация по позициям, в которых существуют объекты, может быть включена в дорожную информацию 223. Помимо этого или альтернативно, информация по позициям, в которых существуют объекты, может приниматься из аппаратуры предоставления информации, такой как ITS, на обочине.
[0057] Процессор 11 определения сохраняет объекты, обнаруженные посредством устройства 230 обнаружения объектов, в доступном состоянии, так что объекты ассоциированы с маршрутами. Процессор 11 определения имеет информацию в отношении того, на каких маршрутах существуют объекты. Дополнительно, процессор 11 определения может определять то, существует или нет объект на извлеченном втором маршруте, позиционную взаимосвязь между объектом на втором маршруте и рассматриваемым транспортным средством и вероятность контакта между объектом на втором маршруте и рассматриваемым транспортным средством.
[0058] Процессор 11 определения согласно одному или более вариантов осуществления настоящего изобретения ассоциирует позиции извлеченного множества событий с соответствующими маршрутами. Процессор 11 определения перекомпонует извлеченное множество событий в порядке встреч с рассматриваемым транспортным средством V1. Процессор 11 определения согласно одному или более вариантов осуществления настоящего изобретения получает порядок встреч с событиями из перехода позиции рассматриваемого транспортного средства V1, движущегося по первому маршруту, и позиций событий и перекомпонует события в порядке встреч с рассматриваемым транспортным средством V1.
[0059] Процессор 11 определения согласно одному или более вариантов осуществления настоящего изобретения извлекает объекты, которые должны встречаться, и ассоциирует позиции встречи с соответствующими маршрутами. Процессор 11 определения перекомпонует объекты, обнаруженные посредством устройства 230 обнаружения объектов, в порядке встреч с рассматриваемым транспортным средством V1. Процессор 11 определения согласно одному или более вариантов осуществления настоящего изобретения получает порядок встреч с объектами из перехода позиции рассматриваемого транспортного средства V1, движущегося по первому маршруту, и позиций объектов и перекомпонует объекты в порядке встреч с рассматриваемым транспортным средством V1.
[0060] Далее описывается устройство 30 вывода.
Устройство 30 вывода включает в себя процессор 31 управления выводом. Процессор 31 управления выводом отображает информацию с использованием дисплея 251 в качестве устройства 30 вывода. Процессор 31 управления выводом отображает информационные элементы, представляющие события, извлеченные посредством процессора определения, в порядке встреч с рассматриваемым транспортным средством и параллельно.
Процессор 31 управления выводом представляет собой компьютер, содержащий постоянное запоминающее устройство (ROM), которое сохраняет программы для выполнения процесса, чтобы отображать информационные элементы, представляющие события, центральный процессор (CPU) в качестве функциональной схемы, которая выполняет программы, сохраненные в ROM, так что он служит в качестве устройства 30 вывода, и оперативное запоминающее устройство (RAM), которое служит в качестве доступного устройства хранения данных. Процессор 31 управления выводом содержит носитель хранения данных, который сохраняет программы для выполнения процесса, чтобы отображать информационные элементы, представляющие события.
[0061] Фиг. 4 иллюстрирует пример отображаемой информации VW, которая представляет события в виде временного ряда. В примере отображения, проиллюстрированном на фиг. 4, первый маршрут для рассматриваемого транспортного средства V1 отображается в качестве стрелки T. Направление стрелки представляет временную ось для рассматриваемого транспортного средства V1. Точки QV12 и QV13 пересечений, извлеченные в качестве событий, отображаются в качестве прямоугольных стрелок, накладываемых на стрелку T. Помимо этого, светофор SG1, стоп-линия ST1 и/или точки QV12 и QV13 пересечений со вторыми маршрутами могут отображаться в качестве событий, с которыми встречается рассматриваемое транспортное средство V1. Информационные элементы, представляющие события (позиции встречи/времена встречи), могут представлять собой символы или также могут представлять собой абстрактные метки. Формы, такие как цвет и размер, могут свободно определяться.
[0062] Процессор 31 управления выводом отображает информационные элементы, такие как символы и метки, которые представляют извлеченные события в позициях в соответствии с отношениями фактических расстояний от рассматриваемого транспортного средства V1 до событий. Как проиллюстрировано на фиг. 4, процессор 31 управления выводом определяет позиции стрелок QV12 и QV13 относительно стрелки T таким образом, что отношение между фактическим расстоянием от рассматриваемого транспортного средства V1 до точки QV12 пересечения и фактическим расстоянием от рассматриваемого транспортного средства V1 до точки QV13 пересечения выражается в отображаемой информации VW, в которой длина стрелки T, представляющей первый маршрут, составляет предварительно определенное расстояние. В альтернативном варианте осуществления, процессор 31 управления выводом может учитывать скорость рассматриваемого транспортного средства V1 и определять позиции стрелок QV12 и QV13 относительно стрелки T таким образом, что отношение между временем, требуемым для прибытия рассматриваемого транспортного средства V1 в точку QV12 пересечения, и временем, требуемым для прибытия рассматриваемого транспортного средства V1 в точку QV13 пересечения, выражается в отображаемой информации VW, в которой длина стрелки T, представляющей первый маршрут, составляет предварительно определенное расстояние.
[0063] Когда события, которые должны встречаться, представляют собой объекты (физические объекты), процессор 31 управления выводом учитывает позиции объектов и/или относительные скорости объектов, чтобы получать позиционные взаимосвязи с рассматриваемым транспортным средством V1. События в этом примере включают в себя объекты, которые существуют позади рассматриваемого транспортного средства V1. Транспортные средства, приближающиеся к рассматриваемому транспортному средству V1 сзади, могут распознаваться в качестве событий, с которыми встречается рассматриваемое транспортное средство V1. Также для других транспортных средств, приближающихся к рассматриваемому транспортному средству V1 сзади, позиции и относительные скорости учитываются, чтобы получать позиционные взаимосвязи с рассматриваемым транспортным средством V1.
[0064] Также, когда события включают в себя стационарные объекты, такие как точки пересечений маршрутов, стоп-линии, заданные в правиле дорожного движения, и дорожные сооружения, а также движущиеся объекты, такие как пешеходы и другие транспортные средства, процессор 31 управления выводом перекомпонует стационарные объекты и движущиеся объекты, включенные в извлеченное множество событий, в порядке встреч с рассматриваемым транспортным средством, т.е. вдоль общей временной оси. Другие транспортные средства включают в себя транспортные средства, которые приближаются к рассматриваемому транспортному средству сзади.
[0065] Таким образом, события, с которыми сталкивается рассматриваемое транспортное средство V1, движущегося по первому маршруту, отображаются в порядке встреч с рассматриваемым транспортным средством и параллельно, и водитель рассматриваемого транспортного средства V1 в силу этого может визуально распознавать то, с какими типами событий должно встречаться рассматриваемое транспортное средство V1, и порядок встреч.
[0066] Процессор 31 управления выводом согласно одному или более вариантов осуществления настоящего изобретения отображает информацию, выводимую из устройства 20 планирования вождения, которое описывается ниже. Ниже также описываются конкретные примеры отображения.
[0067] Здесь описывается процесс определения для окружения с использованием информации 224 правил дорожного движения. Окружение этого примера проиллюстрировано на фиг. 5A. Как проиллюстрировано на фиг. 5A, рассматриваемое транспортное средство V1, движущееся по первому маршруту BV1, поворачивает налево и проезжает через перекресток, на котором предоставляется светофор SG1. Процессор 11 определения извлекает маршруты, имеющие точки пересечений с первым маршрутом BV1. Аналогично вышеописанному примеру, второй маршрут BV2S и второй маршрут BV3R, проиллюстрированные на фиг. 5B, извлекаются в этом примере. Процессор 11 определения обращается к информации 224 правил дорожного движения, ассоциированной с позиционной информацией, и обращается к правилу дорожного движения, действующему на первом маршруте BV1L. Процессор 11 определения извлекает стоп-линию ST1 на первом маршруте BV1L. Позиция стоп-линии ST1 сохраняется в ассоциации с первым маршрутом BV1L. Аналогично для второго маршрута BV2S и второго маршрута BV3R, процессор 11 определения обращается к информации 224 правил дорожного движения и извлекает правило дорожного движения, связанное с вождением других транспортных средств, и необходимые элементы сохраняются в ассоциации с каждым вторым маршрутом. Процессор 11 определения определяет позиции событий для рассматриваемого транспортного средства V1 в соответствии с позициями (позициями стоп-линий), к которым применяются правила дорожного движения, сохраненные в информации 224 правил дорожного движения. В этом примере, процессор 11 определения определяет позицию точки QV1S пересечения между стоп-линией ST1 и первым маршрутом BV1L, которые сохраняются в информации 224 правил дорожного движения, в качестве позиции события.
[0068] Процессор 11 определения проверяет уровни приоритета маршрутов. В примере, проиллюстрированном на фиг. 5B, показан зеленый свет (продвижение вперед разрешается) на первом маршруте BV1L и на втором маршруте BV3R. С другой стороны, показан красный свет (остановка требуется) на втором маршруте BV2S. В этом случае, процессор 11 определения определяет то, что уровень приоритета первого маршрута BV1L выше уровня приоритета второго маршрута BV2S. Процессор 11 определения может удалять точку QV12 пересечения между первым маршрутом BV1L и вторым маршрутом BV2S из возможных вариантов для событий, поскольку уровень приоритета первого маршрута BV1L выше уровня приоритета второго маршрута BV2S. Следует понимать, что точка QV12 пересечения по-прежнему может оставаться сохраненной и использоваться для того, чтобы выполнять определение продвижения вперед в процессе планирования операции вождения, который описывается ниже. Процессор 11 определения не определяет уровни приоритета первого маршрута BV1L и второго маршрута BV3R, поскольку на этих маршрутах показан зеленый свет.
[0069] Процессор 11 определения перекомпонует события в порядке встреч с рассматриваемым транспортным средством V1, т.е. в виде временного ряда. Информация порядка перекомпонованных событий передается в процессор 21 планирования вождения. События, извлеченные через устройство 30 вывода, представляются пользователю в виде временного ряда и параллельно. Это обеспечивает возможность пользователю визуально распознавать то, с какими типами событий должно встречаться рассматриваемое транспортное средство V1.
[0070] Фиг. 6 иллюстрирует пример отображаемой информации VW, которая представляет события в виде временного ряда. В примере отображения, проиллюстрированном на фиг. 6, направление продвижения вперед рассматриваемого транспортного средства V1 по первому маршруту отображается в качестве полужирной стрелки T. Направление стрелки представляет временную ось для рассматриваемого транспортного средства V1. Точка QV1S пересечения со стоп-линией, существующей перед светофором, отображается в качестве значка светофора на стрелке T, поскольку точка QV1S пересечения извлекается в качестве события, и точки QV12 и QV13 пересечений, также извлеченные в качестве событий, отображаются в качестве прямоугольных стрелок, накладываемых на стрелку T. Помимо этого, светофор SG1, стоп-линия ST1 и/или точки QV12 и QV13 пересечений со вторыми маршрутами могут отображаться в качестве событий (объектов в этом примере), с которыми встречается рассматриваемое транспортное средство V1. Информационные элементы, представляющие события (позиции встречи/времена встречи), могут представлять собой символы или также могут представлять собой абстрактные метки. Формы, такие как цвет и размер, могут свободно определяться.
[0071] Далее описывается устройство 20 планирования вождения. Устройство 20 планирования вождения включает в себя процессор 21 планирования вождения. Процессор 21 планирования вождения планирует действие вождения рассматриваемого транспортного средства, движущегося по маршруту. Процессор 21 планирования вождения получает результаты определения для взаимосвязей между рассматриваемым транспортным средством и множеством событий, с которыми встречается рассматриваемое транспортное средство, в виде временного ряда при движении по первому маршруту из процессора 11 определения. Процессор 21 планирования вождения использует взаимосвязи (результаты определения) между событиями, определенными посредством процессора 11 определения, и рассматриваемым транспортным средством V1, чтобы составлять/определять план операций вождения для движения рассматриваемого транспортного средства V1 по первому маршруту. При составлении плана операций вождения, процессор 21 планирования вождения учитывает наличие объектов, обнаруженных посредством устройства 230 обнаружения объектов, чтобы составлять/определять план операций вождения. Процессор 21 планирования вождения составляет план операций вождения таким образом, что рассматриваемое транспортное средство V1 избегает контакта с объектами, существующими рядом с рассматриваемым транспортным средством V1.
Процессор 21 планирования вождения представляет собой компьютер, содержащий постоянное запоминающее устройство (ROM), которое сохраняет программы для выполнения процесса, чтобы планировать/определять действия вождения, включающие в себя движение/остановку рассматриваемого транспортного средства, центральный процессор (CPU) в качестве функциональной схемы, которая выполняет программы, сохраненные в ROM, так что он служит в качестве устройства 20 планирования вождения, и оперативное запоминающее устройство (RAM), которое служит в качестве доступного устройства хранения данных. Процессор 21 планирования вождения содержит носитель хранения данных, который сохраняет программы для выполнения процесса, чтобы определять/планировать действия вождения, включающие в себя движение/остановку рассматриваемого транспортного средства.
[0072] Процессор 21 планирования вождения согласно одному или более вариантов осуществления настоящего изобретения определяет действие (одно действие) для каждого из множества событий, которые извлекаются посредством процессора 11 определения. Действия, которые должны определяться, представляют собой действия, которые связаны с вождением, и включают в себя действия продвижения вперед и действия остановки. Процессор 21 планирования вождения определяет либо действие продвижения вперед, либо действие остановки для каждого события. Процессор 21 планирования вождения всесторонне учитывает содержимое каждого действия, определенного для каждого из множества событий, чтобы составлять/определять последовательность плана операций вождения для окружения, с которым встречается рассматриваемое транспортное средство V1. Посредством этой операции, может составляться план операций вождения, в котором становится очевидным, где рассматриваемое транспортное средство V1 должно выполнять остановку от начала проезда через окружение до завершения проезда через окружение. Это позволяет упрощать процесс для составления окончательного плана операций вождения и уменьшать вычислительную нагрузку.
[0073] Ниже описывается схема определения действий вождения со ссылкой на фиг. 7A и фиг. 7B. Эта схема выполняется посредством процессора 21 планирования вождения. Описание в данном документе направлено на схему определения действий вождения в двух событиях, проиллюстрированных на фиг. 2G, т.е. в событии (точке QV12 пересечения) и в событии (точке QV13 пересечения).
[0074] Фиг. 7A является видом для описания схемы процесса определения для действия вождения в событии (точке QV12 пересечения), проиллюстрированном на фиг. 2G. Процессор 21 планирования вождения определяет действие вождения, которое должно предприниматься для такого события, что рассматриваемое транспортное средство V1 проезжает через точку, в которой первый маршрут BV1L и второй маршрут BV2S пересекаются друг с другом. Процессор 21 планирования вождения вычисляет позиционную взаимосвязь между рассматриваемым транспортным средством и другим транспортным средством V2, ассоциированную со вторым маршрутом BV2S и изменением позиционной взаимосвязи (степени приближения). На основе оставшегося времени для вхождения в контакт с другим транспортным средством V2 посредством рассматриваемого транспортного средства V1, процессор 21 планирования вождения определяет то, может или нет рассматриваемое транспортное средство V1 проезжать через событие (точку QV12 пересечения), которое представляет собой точку пересечения между первым маршрутом и вторым маршрутом, без вхождения в контакт с другим транспортным средством V2.
[0075] Ниже поясняется точка QV12 пересечения, в которой рассматриваемое транспортное средство V1 с большой вероятностью должно встречаться с событием.
Как проиллюстрировано на фиг. 7A, процессор 21 планирования вождения вычисляет оцененное время для прибытия каждого из рассматриваемого транспортного средства V1 и другого транспортного средства V2 в точку QV12 пересечения, и определяет то, может или нет рассматриваемое транспортное средство V1 проезжать через событие (точку QV12 пересечения) с допустимым запасом. Допустим, например, что скорость рассматриваемого транспортного средства V1 составляет VV1, расстояние от рассматриваемого транспортного средства V1 до точки QV12 пересечения составляет L1, скорость другого транспортного средства V2 составляет VV2, и расстояние от другого транспортного средства V2 до точки QV12 пересечения составляет L2.
Когда следующее выражение (1) удовлетворяется, выполняется определение в отношении того, что рассматриваемое транспортное средство V1 с большой вероятностью должно входить в контакт с другим транспортным средством V2 в точке QV12 пересечения, и действие вождения в этом событии, которое встречается в точке QV12 пересечения, определяется как "остановка".
|L2/VV2-L1/VV1| < Tthreshold (1)
С другой стороны, когда следующее выражение (2) удовлетворяется, выполняется определение в отношении того, что рассматриваемое транспортное средство V1 с небольшой вероятностью должно встречаться с проблемой/ситуацией вхождения в контакт с другим транспортным средством V2 в точке QV12 пересечения, и действие вождения в этом событии определяется как "продвижение вперед".
|L2/VV2-L1/VV1| ≥ Tthreshold (2)
Tthreshold представляет допустимое время с учетом безопасности при проезде транспортных средств.
[0076] Фиг. 7B является видом для описания схемы процесса определения для действия вождения в событии (точке QV13 пересечения), проиллюстрированном на фиг. 2G. Процессор 21 планирования вождения определяет действие вождения, которое должно предприниматься для такого события, что рассматриваемое транспортное средство V1 проезжает через точку, в которой первый маршрут BV1L и второй маршрут BV3R пересекаются друг с другом. Процессор 21 планирования вождения вычисляет позиционную взаимосвязь между рассматриваемым транспортным средством и другим транспортным средством V3, ассоциированную со вторым маршрутом BV3R и изменением позиционной взаимосвязи (степени приближения). На основе оставшегося времени для вхождения в контакт с другим транспортным средством V3 посредством рассматриваемого транспортного средства V1, процессор 21 планирования вождения определяет то, может или нет рассматриваемое транспортное средство V1 проезжать через точку QV13 пересечения между первым маршрутом и вторым маршрутом без вхождения в контакт с другим транспортным средством V3. Другими словами, процессор 21 планирования вождения определяет то, может или нет рассматриваемое транспортное средство V1 проезжать через точку QV13 пересечения без встречи с проблемой/ситуацией вхождения в контакт с другим транспортным средством V3.
[0077] Как проиллюстрировано на фиг. 7B, процессор 21 планирования вождения вычисляет оцененное время для прибытия каждого из рассматриваемого транспортного средства V1 и другого транспортного средства V3 в точку QV13 пересечения, и определяет то, может или нет рассматриваемое транспортное средство V1 проезжать через точку QV13 пересечения с допустимым запасом. Таким образом, процессор 21 планирования вождения определяет то, должно рассматриваемое транспортное средство V1 с большой или небольшой вероятностью встречаться с проблемой/ситуацией вхождения в контакт с другим транспортным средством V3 в точке QV13 пересечения. Допустим, например, что скорость рассматриваемого транспортного средства V1 составляет VV1, расстояние от рассматриваемого транспортного средства V1 до точки QV13 пересечения составляет L1, скорость другого транспортного средства V3 составляет VV3, и расстояние от другого транспортного средства V3 до точки QV13 пересечения составляет L3. Расстояние L3 может вычисляться со ссылкой на кривизну/радиус кривизны и т.п., сохраненные в качестве части дорожной информации 223, и также может вычисляться со ссылкой на расстояние между узлами, которое сохраняется в качестве части дорожной информации 223.
Когда следующее выражение (3) удовлетворяется, выполняется определение в отношении того, что рассматриваемое транспортное средство V1 с большой вероятностью должно встречаться с проблемой/ситуацией вхождения в контакт с другим транспортным средством V3 в точке QV13 пересечения, и действие вождения в этом событии определяется как "остановка".
|L3/VV3-L1/VV1| < Tthreshold (3)
С другой стороны, когда следующее выражение (4) удовлетворяется, выполняется определение в отношении того, что рассматриваемое транспортное средство V1 с небольшой вероятностью должно встречаться с проблемой/ситуацией вхождения в контакт с другим транспортным средством V3 в точке QV13 пересечения, и действие вождения в этом событии определяется как "продвижение вперед".
|L3/VV3-L1/VV1| ≥ Tthreshold (4)
Tthreshold представляет допустимое время с учетом безопасности при проезде транспортных средств.
[0078] Вышеописанный процессор 31 управления выводом может отображать результат определения действия вождения в каждом событии на дисплее 251. Фиг. 8 иллюстрирует пример отображения результата определения действия вождения. Как проиллюстрировано на фиг. 8, процессор 31 управления выводом компонует множество событий в порядке встреч с рассматриваемым транспортным средством V1 и отображает определение действия вождения в каждом событии в качестве текстовой информации и/или символа.
[0079] Процессор 21 планирования вождения согласно одному или более вариантов осуществления настоящего изобретения использует определенные взаимосвязи между рассматриваемым транспортным средством V1 и множеством событий, с которыми встречается рассматриваемое транспортное средство V1, в виде временного ряда, чтобы составлять/определять последовательность плана операций вождения для окружения, с которым встречается рассматриваемое транспортное средство. Хотя не ограничено конкретным образом, процессор 21 планирования вождения составляет унифицированный план операций вождения для операций вождения, которые рассматриваемое транспортное средство V1 должно осуществлять для окружения, которое должно встречаться. План операций вождения представляет инструкции, в которых команды остановки и продвижения вперед ассоциированы с соответствующими событиями, извлеченными на первом маршруте от момента при въезде в окружение (например, область R1 окружения) до момента при выезде из окружения (например, область R1 окружения).
[0080] Когда выполняется определение действия остановки или определение неопределимости (невозможности определять), по меньшей мере, для одного или более событий из событий, извлеченных посредством процессора 11 определения, процессор 21 планирования вождения согласно одному или более вариантов осуществления настоящего изобретения составляет план операций вождения для управления рассматриваемым транспортным средством V1 с возможностью выполнять остановку в окружении, с которым встречается рассматриваемое транспортное средство V1.
[0081] Когда выполняется определение действия остановки или определение неопределимости (невозможности определять), по меньшей мере, для одного или более событий из событий, извлеченных посредством процессора 11 определения, процессор 21 планирования вождения согласно одному или более вариантов осуществления настоящего изобретения составляет план операций вождения таким образом, что рассматриваемое транспортное средство V1 выполняет остановку в событии, которое является ближайшим к текущей позиции рассматриваемого транспортного средства V1. Когда точка, в которой должно выполнять остановку рассматриваемое транспортное средство V1, существует в области R1, соответствующей окружению, рассматриваемое транспортное средство V1 может управляться с возможностью выполнять остановку в такой момент, чтобы исключать риск.
[0082] Случаи, в которых процессор 21 планирования вождения выполняет определение неопределимости (невозможности определять), включают в себя случай, в котором отношение слепой зоны, включенной в изображение, захваченное посредством камеры 231, составляет предварительно определенное значение или больше, случай, в котором точность обнаружения для объекта посредством устройства 230 обнаружения объектов меньше предварительно определенного значения, случай, в котором процесс, выполняемый посредством устройства 240 недопущения выезда за пределы полосы движения, прерывается, и случай, в котором водитель вмешивается в работу. Когда выполняется определение неопределимости (невозможности определять), рассматриваемое транспортное средство V1 может управляться с возможностью выполнять остановку немедленно, чтобы за счет этого подавлять выполнение плана операций вождения на основе некорректной информации.
[0083] Когда определение действия продвижения вперед выполняется для события из событий, извлеченных посредством процессора 11 определения, и определение действия остановки или неопределимости выполняется для следующего события, которое должно встречаться следующим после события, процессор 21 планирования вождения согласно одному или более вариантов осуществления настоящего изобретения составляет план операций вождения таким образом, что рассматриваемое транспортное средство V1 выполняет остановку в точке встречи с событием, для которого выполняется действие продвижения вперед. Даже в случае, если однократно определено действие продвижения вперед, когда событие, с которым после этого встречается рассматриваемое транспортное средство V1, требует действия остановки или является неопределимым, рассматриваемое транспортное средство V1 может управляться с возможностью выполнять остановку в позиции, для которой однократно определено действие продвижения вперед. Местоположение, для которого определяется действие продвижения вперед, представляет собой местоположение, в котором рассматриваемому транспортному средству V1 разрешается существовать, и рассматриваемое транспортное средство V1 в силу этого может управляться с возможностью выполнять безопасную остановку.
[0084] Когда определение действия остановки или неопределимости выполняется для события из событий, извлеченных посредством процессора 11 определения, и событие принадлежит второму маршруту, процессор 21 планирования вождения согласно одному или более вариантов осуществления настоящего изобретения управляет рассматриваемым транспортным средством V1 с возможностью выполнять остановку в позиции, которая расположена на стороне дополнительно раньше по потоку, чем событие, и в которой остановка является возможной. Даже в случае, если определение действия остановки или неопределимости выполняется для события, когда позиция остановки для события принадлежит второму маршруту, рассматриваемое транспортное средство V1 может перегораживать другие транспортные средства, движущиеся по второму маршруту. Позиция остановки в силу этого является несоответствующей. Согласно одному или более вариантов осуществления настоящего изобретения, позиция остановки может задаваться в качестве расположенной раньше по потоку позиции, в которой остановка является возможной, а не в пределах второго маршрута.
[0085] Когда определение действия остановки или неопределимости выполняется для события из событий, извлеченных посредством процессора 11 определения, и событие является близким или перекрывает другое событие таким образом, что эти события расположены в пределах предварительно определенного расстояния, процессор 21 планирования вождения согласно одному или более вариантов осуществления настоящего изобретения управляет рассматриваемым транспортным средством V1 с возможностью выполнять остановку в позиции, которая расположена на стороне дополнительно раньше по потоку, чем событие, и в которой остановка является возможной. Даже в случае, если определение действия остановки или неопределимости выполняется для события, когда позиция остановки для события находится близко или перекрывает позицию остановки для другого события, возможно, должно учитываться сопоставление с определением для другого события. Позиция остановки в силу этого является несоответствующей. Согласно одному или более вариантов осуществления настоящего изобретения, позиция остановки может задаваться в качестве расположенной раньше по потоку позиции, в которой остановка является возможной, а не в пределах второго маршрута. Это позволяет уменьшать случаи неопределимости. Кроме того, нагрузка процессов определения может уменьшаться, и рассматриваемое транспортное средство V1 может двигаться плавно в области R1 окружения без повторения вождения в режиме частых остановок и троганий с места.
[0086] Когда определение действия продвижения вперед выполняется для одного события из событий, извлеченных посредством процессора 11 определения, и определение действия остановки или неопределимости выполняется для другого события, которое должно встречаться следующим после одного события, процессор 21 планирования вождения согласно одному или более вариантов осуществления настоящего изобретения составляет план операций вождения таким образом, что рассматриваемое транспортное средство V1 продвигается вперед через одно событие, если степень разделения между одним событием и другим событием составляет предварительно определенное значение или больше. Когда продвижение вперед разрешается для одного события, но определение действия остановки или неопределимости выполняется для другого события, которое должно встречаться после этого, если рассматриваемое транспортное средство V1 управляется с возможностью выполнять остановку в одном расположенном ранее событии, определение должно выполняться снова в отношении того, разрешается или нет продвижение вперед через другое событие, и рассматриваемое транспортное средство V1 может создавать помехи для транспортного потока других транспортных средств на другом маршруте в качестве второго маршрута. Таким образом, когда отдельные события определяются различными способами: "продвижение вперед" на стороне раньше по потоку и "остановка" на расположенной далее по потоку стороне, рассматриваемому транспортному средству V1 может разрешаться продвигаться вперед через расположенное ранее событие, чтобы за счет этого не допускать усложнения процесса.
[0087] Когда процессор 21 планирования вождения согласно одному или более вариантов осуществления настоящего изобретения определяет позицию остановки для рассматриваемого транспортного средства V1, позиция остановки может представлять собой позицию события, которая является ближайшей к текущей позиции рассматриваемого транспортного средства V1 и в пределах границы R1, соответствующей окружению. Позиция остановки для рассматриваемого транспортного средства V1 в противном случае может быть расположена за пределами/рядом с границей R1, соответствующей окружению. Позиция остановки для рассматриваемого транспортного средства V1 также может представлять собой позицию события, из числа событий в пределах границы R1, соответствующей окружению, которая расположена на самой верхней по потоку стороне вдоль направления приближения рассматриваемого транспортного средства V1.
Процесс задания для вышеуказанной позиции остановки может выбираться в соответствии с интенсивностью движения перекрестка, типом дороги и шириной дороги.
[0088] Процессор 21 планирования вождения согласно одному или более вариантов осуществления настоящего изобретения осуществляет управление скоростью.
Когда определение действия продвижения вперед выполняется для одного события из событий, извлеченных посредством процессора 11 определения, и определение действия остановки или неопределимости выполняется для другого события, которое должно встречаться следующим после одного события, процессор 21 планирования вождения согласно одному или более вариантов осуществления настоящего изобретения составляет/определяет план операций вождения таким образом, чтобы уменьшать скорость действия продвижения вперед в одном событии.
[0089] Здесь, описывается процесс определения для окружения и процесс составления для плана операций вождения со ссылкой на пример конкретного окружения. Окружение этого примера проиллюстрировано на фиг. 9A. Как проиллюстрировано на фиг. 9A, рассматриваемое транспортное средство V1, движущееся по первому маршруту BV1, поворачивает налево и проезжает через перекресток, на котором предоставляются светофор SG1 и пешеходный переход CR1. Процессор 11 определения извлекает маршруты, имеющие точки пересечений с первым маршрутом BV1L. Пешеходный переход представляет собой один из маршрутов, через которые проходят пешеходы.
[0090] В этом примере, как проиллюстрировано на фиг. 9B, пешеходный переход CR1, второй маршрут BV2S, второй маршрут BV3R и пешеходный переход CR4 извлекаются в качестве вторых маршрутов. Процессор 11 определения обращается к информации 224 правил дорожного движения, ассоциированной с позиционной информацией, и обращается к правилу дорожного движения, действующему на первом маршруте BV1L. Процессор 11 определения извлекает стоп-линию ST1, которая расположена на первом маршруте BV1L и на стороне раньше по потоку пешеходного перехода CR1. Позиция стоп-линии ST1 сохраняется в ассоциации с первым маршрутом BV1L. Аналогично для второго маршрута BV2S и второго маршрута BV3R, процессор 11 определения обращается к информации 224 правил дорожного движения и извлекает правила дорожного движения, связанные с вождением других транспортных средств, и необходимые элементы сохраняются в ассоциации с каждым вторым маршрутом. Процессор 11 определения определяет позиции событий для рассматриваемого транспортного средства V1 в соответствии с позициями (позициями стоп-линий), к которым применяются правила дорожного движения, сохраненные в информации 224 правил дорожного движения.
[0091] В этом примере, процессор 11 определения определяет позицию точки QVC1 пересечения между стоп-линией ST1 и первым маршрутом BV1L, которые сохраняются в информации 224 правил дорожного движения, в качестве позиции события. Позиции остановки, соответствующие событиям, сохраняются для каждого маршрута. В этом примере, точка QV1S пересечения в качестве события ассоциирована в качестве позиции остановки с пешеходным переходом CR1. Точка QV12 пересечения в качестве события ассоциирована в качестве позиции остановки со вторым маршрутом BV2S. Точка QV13 пересечения в качестве события ассоциирована в качестве позиции остановки со вторым маршрутом BV3R. Точка QVC4 пересечения в качестве события ассоциирована в качестве позиции остановки с пешеходным переходом CR4.
[0092] Процессор 11 определения проверяет уровни приоритета первого маршрута и второго маршрута. В примере, проиллюстрированном на фиг. 9B, показан зеленый свет (продвижение вперед разрешается) на первом маршруте BV1L и на втором маршруте BV3R. С другой стороны, показан красный свет (остановка требуется) на втором маршруте BV2S. В этом случае, процессор 11 определения определяет то, что уровень приоритета первого маршрута BV1L выше уровня приоритета второго маршрута BV2S. Процессор 11 определения может удалять точку QV12 пересечения между первым маршрутом BV1L и вторым маршрутом BV2S из возможных вариантов для событий, поскольку уровень приоритета первого маршрута BV1L выше уровня приоритета второго маршрута BV2S. Следует понимать, что точка QV12 пересечения по-прежнему может оставаться сохраненной и использоваться для того, чтобы выполнять определение продвижения вперед в процессе планирования операции вождения, который описывается ниже. Процессор 11 определения не определяет уровни приоритета первого маршрута BV1L и второго маршрута BV3R, поскольку на этих маршрутах показан зеленый свет.
[0093] Помимо этого, процессор 11 определения проверяет уровни приоритета пешеходных переходов в качестве вторых маршрутов и первого маршрута.
В примере, проиллюстрированном на фиг. 9B, показан красный свет (переход запрещается) на пешеходном переходе CR1, в то время как показан зеленый свет (продвижение вперед разрешается) на первом маршруте BV1L. Следовательно, определяется то, что уровень приоритета первого маршрута BV1L выше уровня приоритета пешеходного перехода CR1. Процессор 11 определения может удалять точку QVC1 пересечения между первым маршрутом BV1L и пешеходным переходом CR1 из возможных вариантов для событий, поскольку уровень приоритета первого маршрута BV1L выше уровня приоритета пешеходного перехода CR1. Следует понимать, что точка QVC1 пересечения по-прежнему может оставаться сохраненной и использоваться для того, чтобы выполнять определение продвижения вперед в процессе планирования операции вождения, который описывается ниже.
В примере, проиллюстрированном на фиг. 9B, показан зеленый свет (переход разрешается) на пешеходном переходе CR4, с которым пересекается первый маршрут BV1L. Также показан зеленый свет (продвижение вперед разрешается) на первом маршруте BV1L, но в соответствии с таким правилом дорожного движения, что пешеходы на пешеходных переходах имеют приоритет, выполняется определение в отношении того, что уровень приоритета первого маршрута BV1L ниже уровня приоритета пешеходного перехода CR4. Процессор 11 определения сохраняет точку QVC4 пересечения между первым маршрутом BV1L и пешеходным переходом CR4, поскольку уровень приоритета первого маршрута BV1L ниже уровня приоритета пешеходного перехода CR4.
[0094] Процессор 11 определения определяет точку QV1S пересечения между первым маршрутом BV1L и стоп-линией ST1, точку QV12 пересечения между первым маршрутом BV1L и вторым маршрутом BV2S, точку QV13 пересечения между первым маршрутом BV1L и вторым маршрутом BV3R и точку QVC4 пересечения между первым маршрутом BV1L и пешеходным переходом CR4 в качестве событий.
[0095] Процессор 11 определения извлекает первый маршрут BV1L, второй маршрут BV2S, второй маршрут BV3R, пешеходный переход CR1 в качестве второго маршрута и объекты, существующие на пешеходном переходе CR4, к примеру, пешеходы и два колеса, в качестве событий. В примере, проиллюстрированном на фиг. 9B, процессор 11 определения извлекает другое транспортное средство V2, движущееся по второму маршруту BV2S, другое транспортное средство V3, движущееся по второму маршруту BV3R, пешехода H1, переходящего по пешеходному переходу CR1, и пешехода H4, переходящего по пешеходному переходу CR4, в качестве событий. Каждый объект сохраняется в ассоциации с маршрутом/позицией.
[0096] Процессор 11 определения перекомпонует события в порядке встреч с рассматриваемым транспортным средством V1, т.е. в виде временного ряда. Информация порядка перекомпонованных событий передается в процессор 21 планирования вождения. События, извлеченные через устройство 30 вывода, представляются пользователю в виде временного ряда и параллельно. Это обеспечивает возможность пользователю визуально распознавать то, с какими типами событий должно встречаться рассматриваемое транспортное средство V1.
[0097] Фиг. 10 иллюстрирует пример отображаемой информации VW, которая представляет события в виде временного ряда. В примере отображения, проиллюстрированном на фиг. 10, направление продвижения вперед рассматриваемого транспортного средства V1 по первому маршруту отображается в качестве полужирной стрелки T. Направление стрелки представляет временную ось для рассматриваемого транспортного средства V1. Точка QV1S пересечения со стоп-линией, существующей перед светофором, отображается в качестве значка пешеходного перехода на стрелке T, поскольку точка QV1S пересечения извлекается в качестве события, и точки QV12 и QV13 пересечений, извлеченные в качестве событий, отображаются в качестве прямых и прямоугольных стрелок, накладываемых на стрелку T, в то время как точка QVC4 пересечения с пешеходным переходом CR4, извлеченным в качестве события, отображается в качестве значка пешеходного перехода, накладываемого на стрелку T. Помимо этого, пешеходный переход CR1, точки QV12 и QV13 пересечений со вторыми маршрутами и пешеходный переход CR4 также могут отображаться в качестве событий, с которыми встречается рассматриваемое транспортное средство V1. Дополнительно могут отображаться объекты, существующие на каждом втором маршруте. В этом примере отображения, отображается пешеход H1, существующий на пешеходном переходе CR1, и пешеход H4, существующий на пешеходном переходе CR4. Информационные элементы, которые представляют точки и/или объекты, представляющие события (позиции встречи/времена встречи/объекты встречи), могут представлять собой символы или также могут представлять собой абстрактные метки. Формы, такие как цвет и размер, могут свободно определяться.
[0098] Процессор 21 планирования вождения согласно одному или более вариантов осуществления настоящего изобретения определяет действия вождения для соответствующих событий или вторых маршрутов, ассоциированных с событиями, следующим образом.
(1) Светофор SG1 на первом маршруте BV1L показывает зеленый свет (продвижение вперед), тогда как светофоры для пешеходов SGH1 на пешеходном переходе CR1 показывают красный свет (остановка). Процессор 21 планирования вождения определяет действие вождения для события в точке QV1S пересечения в качестве "продвижения вперед", поскольку уровень приоритета первого маршрута BV1L выше уровня приоритета пешеходного перехода CR1.
(2) Светофор SG2 на втором маршруте BV2S показывает красный свет (остановка). Процессор 21 планирования вождения определяет действие вождения для события в точке QV12 пересечения в качестве "продвижения вперед", поскольку уровень приоритета первого маршрута BV1L выше уровня приоритета второго маршрута BV2S.
(3) Светофор SG1 на первом маршруте BV1L показывает зеленый свет (продвижение вперед), тогда как светофор SG3 на втором маршруте BV3R также показывает зеленый свет (продвижение вперед). Процессор 21 планирования вождения не определяет уровень приоритета первого маршрута BV1L относительно второго маршрута BV3R. На основе оставшегося времени для вхождения в контакт с другим транспортным средством V3 посредством рассматриваемого транспортного средства V1, процессор 21 планирования вождения определяет действие вождения в точке QV13 пересечения.
(4) Светофор SG1 на первом маршруте BV1L показывает зеленый цвет (или синий) свет (продвижение вперед разрешается), тогда как светофоры для пешеходов SGH4 на пешеходном переходе CR4 также показывают зеленый свет (переход разрешается). Согласно правилу дорожного движения, сохраненному в информации 224 правил дорожного движения, уровень приоритета пешеходного перехода выше уровня приоритета дороги для транспортных средств. Таким образом, оба показывают зеленый свет, но в соответствии с информацией 224 правил дорожного движения, процессор 21 планирования вождения определяет действие вождения для события в точке QVC4 пересечения (см. фиг. 9B) в качестве "остановки".
[0099] Затем, процессор 21 планирования вождения согласно одному или более вариантов осуществления настоящего изобретения составляет/определяет план операций вождения в каждом окружении. Процессор 21 планирования вождения определяет то, имеется или нет событие, для которого определяется "остановка", из множества событий, извлеченных в области R1, заданной с окружением. Когда извлеченные события включают в себя одно или более событий, для которых определяется "остановка", процессор 21 планирования вождения определяет то, что действия вождения в окружении в целом представляют собой "остановку". Процессор 21 планирования вождения дополнительно определяет конкретную позицию остановки.
[0100] В этом примере, когда "остановка" определяется, например, для события в точке QV13 пересечения на втором маршруте BV3R, имеется два или более маршрута, для которых определяется "остановка": второй маршрут BV3R; и пешеходный переход CR4, который представляет собой второй маршрут.
[0101] Процессор 21 планирования вождения определяет "остановку" для события, которое является ближайшим к рассматриваемому транспортному средству V1, движущемуся по первому маршруту. Процессор 21 планирования вождения определяет позицию остановки на основе позиции этого события. Позиция остановки должна быть расположена на стороне дополнительно раньше по потоку, чем позиция события относительно направления движения рассматриваемого транспортного средства V1 по первому маршруту, и расположена в пределах предварительно определенного расстояния от события. В этом примере, "остановка" определяется для события, связанного с точкой QV13 пересечения на втором маршруте BV3R, а не с точкой QVC4 пересечения с пешеходным переходом CR4.
[0102] В вышеописанном случае, позиция остановки для точки QV13 пересечения (события) ассоциирована со вторым маршрутом BV3R, но точка QV13 пересечения существует на втором маршруте BV2S. Процессор 21 планирования вождения в силу этого не задает позицию остановки в точке QV13 пересечения и в ее окрестности, а вместо этого задает позицию остановки в точке QV12 пересечения, ассоциированной со вторым маршрутом BV2S, или около точки QV12 пересечения.
[0103] Когда "продвижение вперед" определяется для события, связанного с точкой QV13 пересечения на втором маршруте BV3R, точка QVC4 пересечения с пешеходным переходом CR4 задается в качестве позиции остановки. Точка QVC4 пересечения расположена на пешеходном переходе CR4 и также расположена на втором маршруте BV3R. В связи с этим, точка QV13 пересечения на втором маршруте BV3R на стороне раньше по потоку в направлении движения рассматриваемого транспортного средства V1 задается в качестве позиции остановки. Дополнительно, точка QV13 пересечения расположена на втором маршруте BV3R и также расположена на втором маршруте BV2S. В связи с этим, точка QV12 пересечения на втором маршруте BV2S на стороне раньше по потоку в направлении движения рассматриваемого транспортного средства V1 задается в качестве позиции остановки.
Вышеуказанный процесс повторяется до тех пор, пока не выполняется определение в отношении того, что все события обрабатываются вдоль первого маршрута в место назначения.
[0104] Ниже описывается модифицированный пример вышеуказанного процесса. Окружение этого примера проиллюстрировано на фиг. 11A.
Этот пример представляет собой примерное окружение, когда рассматриваемое транспортное средство движется на двухполосной дороге в качестве первого маршрута BV1.
Процессор 11 определения извлекает пешеходный переход CR в качестве второго маршрута, имеющего точку пересечения с первым маршрутом BV1. Процессор 11 определения дополнительно извлекает другое транспортное средство V5 в качестве события и сохраняет его в ассоциации с первым маршрутом BV1. В вышеописанном примере, первый маршрут и второй маршрут пересекаются друг с другом под углом, но в этом примере, первый маршрут и второй маршрут совместно используют определенную зону на маршруте.
[0105] Извлеченные события компонуются в порядке встреч. Теперь рассмотрим относительное расстояние от рассматриваемого транспортного средства V1 до другого транспортного средства V5 и относительное расстояние от рассматриваемого транспортного средства V1 до пешеходного перехода CR со ссылкой на первый маршрут BV1 для рассматриваемого транспортного средства V1. Процессор 31 управления выводом отображает скомпонованные события на дисплее 251 на основе полученных относительных расстояний. Пример отображения проиллюстрирован на фиг. 12. Как проиллюстрировано на фиг. 12, рассматриваемое транспортное средство V1, другое транспортное средство V5 и пешеходный переход CR отображаются в этом порядке.
[0106] Если рассматриваемое транспортное средство V1 движется прямой в состоянии по фиг. 11A, рассматриваемое транспортное средство V1 не может проезжать через событие, связанное с другим транспортным средством V5, поскольку рассматриваемое транспортное средство V1 должно входить в контакт с другим транспортным средством V5. Когда пешеход существует на пешеходном переходе CR, процессор 21 планирования вождения определяет "остановку". Когда, аналогично этому примеру, другое транспортное средство V5 скрывает пешехода на пешеходном переходе CR, определение неопределимости (невозможности определять) выполняется вследствие возникновения слепой зоны.
[0107] Процессор 21 планирования вождения определяет вероятность контакта между рассматриваемым транспортным средством V1 и другим транспортным средством V5. Процессор 11 определения выполняет поиск маршрута для предотвращения столкновения с другим транспортным средством V5, как проиллюстрировано на фиг. 11B, и когда такой маршрут объезда получается, событие, связанное с другим транспортным средством V5, может определяться в качестве "продвижения вперед". Условия для маршрута объезда могут включать в себя такое условие, что отсутствуют другие транспортные средства, движущиеся на встречной полосе движения, и такое условие, что маршрут получается для предотвращения столкновения с другим транспортным средством V5, имеющим ширину транспортного средства, превышающую ширину рассматриваемого транспортного средства V1.
[0108] Процессор 21 планирования вождения определяет действия для всего окружения. В этом примере, столкновение с другим транспортным средством V5 может предотвращаться, так что "продвижение вперед" определяется для этого события. Наличие пешехода на пешеходном переходе CR не может подтверждаться (невозможно определять). В этом случае, рассматриваемое транспортное средство V1 должно останавливаться перед пешеходным переходом CR, и в силу этого определяется "остановка". Событие "продвижения вперед" существует перед событием "остановки". В этом случае, процессор 21 планирования вождения задает скорость при движении по маршруту для предотвращения столкновения с другим транспортным средством V5, для которого определяется "продвижение вперед", равной более низкой скорости, чем скорость, заданная заранее. Другими словами, процессор 21 планирования вождения управляет рассматриваемым транспортным средством V1 с возможностью замедляться. Рассматриваемое транспортное средство V1 замедляется, чтобы предотвращать столкновение с другим транспортным средством V5, столкновение с которым может предотвращаться, и приближается к пешеходному переходу CR (событию) на скорости возможности остановки (скорости, с которой немедленная остановка является возможной), чтобы проезжать через пешеходный переход CR. С другой стороны, определение является неопределимым для пешеходного перехода CR вследствие слепой зоны вследствие парковки другого транспортного средства V5.
[0109] Когда наличие пешехода на пешеходном переходе CR может подтверждаться, и "остановка" определяется для пешеходного перехода CR, рассматриваемое транспортное средство V1 выполняет остановку перед пешеходным переходом CR. В случаях четырехполосной дороги, то, есть или нет возможность сменять полосу движения, может определяться вместе с учетом вероятности помех для других транспортных средств, движущихся в смежной полосе движения. Они обеспечивают возможность соответствующих реакций на события, которые трудно определять заранее, такие как возникновение слепой зоны.
[0110] Ниже описывается схема задания возможных вариантов позиций остановки при определении позиции остановки в плане операций вождения.
[0111] Процессор 21 планирования вождения согласно одному или более вариантов осуществления настоящего изобретения задает один или более возможных вариантов позиций остановки для выполнения остановки посредством рассматриваемого транспортного средства V1, с использованием результатов определения для взаимосвязей между рассматриваемым транспортным средством V1 и множеством событий, с которыми встречается рассматриваемое транспортное средство V1, в виде временного ряда при движении по первому маршруту. Один или более возможных вариантов позиций остановки задаются для соответствующих событий. Процессор 21 планирования вождения составляет/определяет план операций вождения для окружения, с которым встречается рассматриваемое транспортное средство, с использованием результатов определения для взаимосвязей между рассматриваемым транспортным средством V1 и множеством событий, с которыми встречается рассматриваемое транспортное средство, в возможных вариантах позиций остановки.
Таким образом, при трафике, в котором первый маршрут и второй маршрут имеют точку пересечения, план операций вождения составляется/определяется с учетом взаимосвязей между рассматриваемым транспортным средством V1 и множеством событий, с которыми встречается рассматриваемое транспортное средство V1, в возможных вариантах позиций остановки, и в силу этого вождение может быть реализовано без оказания влияния на другие транспортные средства, пешеходов и т.д.
[0112] Процессор 21 планирования вождения согласно одному или более вариантов осуществления настоящего изобретения определяет возможный вариант позиции остановки из возможных вариантов позиций остановки, который является ближайшим к рассматриваемому транспортному средству V1 в окружении, с которым встречается рассматриваемое транспортное средство V1, в качестве позиции остановки для выполнения остановки посредством рассматриваемого транспортного средства V1. Таким образом, рассматриваемое транспортное средство V1 управляется с возможностью выполнять остановку в позиции, из возможных вариантов позиций остановки, которая является ближайшей к текущей позиции рассматриваемого транспортного средства V1, и может уменьшаться влияние на транспортный поток.
[0113] Процессор 21 планирования вождения согласно одному или более вариантов осуществления настоящего изобретения задает возможные варианты позиций остановки в позициях, расположенных на стороне дополнительно раньше по потоку на предварительно определенных расстояниях, чем позиции остановки, требуемые для выполнения остановки посредством рассматриваемого транспортного средства V1. Влияние на транспортный поток может уменьшаться, поскольку рассматриваемое транспортное средство V1 управляется с возможностью выполнять остановку в позиции, которая находится ближе к текущей позиции рассматриваемого транспортного средства, чем позиция остановки, заданная в фактической информации 224 правил дорожного движения.
[0114] Процессор 21 планирования вождения согласно одному или более вариантов осуществления настоящего изобретения задает возможные варианты позиций остановки в позициях, расположенных на стороне дополнительно раньше по потоку на предварительно определенных расстояниях, чем внешний край области, в которой парковка и остановка рассматриваемого транспортного средства V1 запрещается, т.е. за пределами/рядом с областью запрета парковки и остановки. Влияние на транспортный поток может уменьшаться, поскольку рассматриваемое транспортное средство V1 управляется с возможностью выполнять остановку в позиции, которая находится ближе к текущей позиции рассматриваемого транспортного средства, чем позиция остановки, заданная в фактической информации 224 правил дорожного движения.
[0115] Процессор 21 планирования вождения согласно одному или более вариантов осуществления настоящего изобретения задает возможные варианты позиций остановки за пределами/рядом с областью возможности движения другого маршрута в качестве второго маршрута, который пересекается с первым маршрутом. Влияние на транспортный поток может уменьшаться, поскольку рассматриваемое транспортное средство V1 управляется с возможностью выполнять остановку в позиции, которая находится ближе к текущей позиции рассматриваемого транспортного средства V1, чем позиция, расположенная в полосе движения второго маршрута, либо чем внешний край области возможности движения.
[0116] Когда рассматриваемое транспортное средство V1 проезжает через одно событие, и кузов транспортного средства для рассматриваемого транспортного средства V1 выступает из первого маршрута, процессор 21 планирования вождения согласно одному или более вариантов осуществления настоящего изобретения составляет/определяет план операций вождения таким образом, что рассматриваемое транспортное средство V1 выполняет остановку в возможном варианте позиции остановки, который расположен на стороне раньше по потоку, смежной с одним событием. Когда рассматриваемое транспортное средство V1 выступает из первого маршрута, т.е. когда кузов транспортного средства для рассматриваемого транспортного средства V1 может въезжать в полосу движения другого маршрута или его области возможности движения, влияние на транспортный поток может уменьшаться, поскольку рассматриваемое транспортное средство V1 управляется с возможностью выполнять остановку в позиции события, которая ближе к текущей позиции рассматриваемого транспортного средства V1. Хотя не ограничено конкретным образом, когда рассматриваемое транспортное средство V1 проезжает через одно событие, и, по меньшей мере, часть кузова транспортного средства для рассматриваемого транспортного средства V1 въезжает во второй маршрут, рассматриваемое транспортное средство V1 может управляться с возможностью выполнять остановку в возможном варианте позиции остановки, который расположен на стороне раньше по потоку, смежной с одним событием. Также в этом случае, может уменьшаться влияние на транспортный поток.
[0117] Процессор 21 планирования вождения согласно одному или более вариантов осуществления настоящего изобретения может быть выполнен с возможностью не задавать возможные варианты позиций остановки в области, в которой события, с которыми встречается рассматриваемое транспортное средство V1, не возникают вследствие светофора на первом маршруте или правила дорожного движения на первом маршруте. Когда рассматриваемому транспортному средству V1 обеспечивается возможность двигаться по первому маршруту вследствие зеленого света, и/или когда первый маршрут задается как приоритетная дорога посредством правила дорожного движения, и рассматриваемому транспортному средству V1 обеспечивается возможность иметь приоритет по сравнению с движением, задание возможных вариантов позиций остановки может быть необязательным. Остановка в силу этого может избегаться в окружении, в котором не требуется остановка, и может выполняться плавное движение.
[0118] Когда другое транспортное средство сливается с первым маршрутом в позиции для возможного варианта позиции остановки из второго маршрута, имеющего точку пересечения с первым маршрутом, и скорость другого транспортного средства составляет указанную скорость или меньше, процессор 21 планирования вождения согласно одному или более вариантов осуществления настоящего изобретения определяет остановку в другом возможном варианте позиции остановки, который расположен на стороне раньше по потоку, смежной с возможным вариантом позиции остановки. Когда скорость другого транспортного средства, сливающегося с первым маршрутом в позиции для возможного варианта позиции остановки, составляет указанную скорость или меньше, пробка или другая аналогичная дорожная ситуация, возможно, может возникать. В таких случаях, рассматриваемое транспортное средство не может выполнять остановку в соответствующей позиции и может влиять на другие транспортные средства и/или пешеходов. Следовательно, когда скорость другого транспортного средства, сливающегося с первым маршрутом в позиции для возможного варианта позиции остановки, составляет указанную скорость или меньше, рассматриваемое транспортное средство может управляться с возможностью выполнять остановку в возможном варианте позиции остановки около текущей позиции рассматриваемого транспортного средства, чтобы за счет этого предпринимать действие вождения, которое не влияет на потоки других транспортных средств и пешеходов.
[0119] Ниже описывается первая схема задания позиции остановки в плане операций вождения.
Ниже приводится описание со ссылкой на примерное окружение, проиллюстрированное на фиг. 13A. Окружение, проиллюстрированное на фиг. 13A, представляет собой окружение, в котором рассматриваемое транспортное средство V1 поворачивает направо на перекрестке. Процессор 11 определения извлекает первый маршрут BV1, пешеходный переход CR1 и пешеходный переход CR2.
[0120] Здесь, извлекаются вторые маршруты, имеющие точки пересечений с первым маршрутом. Извлечение вторых маршрутов может эффективно обрабатываться с использованием информации соединений и информации узлов, которые включены в картографическую информацию 222.
Как проиллюстрировано на фиг. 13B, картографическая база данных, представляющая перекресток, включает в себя число узлов ND и число соединений LK. Узлы ND обозначаются посредством окружностей, и соединения LK обозначаются посредством стрелок на маршрутах. Соединения LK выражают все места назначения (соединительные порты) в узлах ND, которые представляют собой начальные/конечные точки. Примеры таких узлов включают в себя узлы, в которых соединения ответвляются от одного узла до двух или более узлов, и узлы, в которых соединения унифицируются в один узел из двух или более узлов. Здесь, посредством фокусировки внимания на узлах, в которых соединения унифицируются в один узел из двух или более узлов, можно извлекать соединения, которые могут сливаться с первым маршрутом для рассматриваемого транспортного средства, и соединения, которые могут пересекаться с первым маршрутом для рассматриваемого транспортного средства. Это обеспечивает извлечение полос движения, которые могут сливаться с первым маршрутом для рассматриваемого транспортного средства, и полос движения, которые могут пересекаться с первым маршрутом для рассматриваемого транспортного средства.
[0121] Процессор 21 планирования вождения задает возможные варианты позиций остановки. Возможные варианты позиций остановки задаются для событий, которые выбираются из событий, извлеченных посредством процессора 11 определения. Процессор 21 планирования вождения определяет то, представляют собой возможные варианты позиций остановки или нет возможные варианты позиций остановки для событий, извлеченных посредством процессора 11 определения.
[0122] В зависимости от состояния светофоров на первом маршруте для рассматриваемого транспортного средства V1, возникают случаи, в которых не требуется учитывать вторые маршруты, которые сливаются с первым маршрутом для рассматриваемого транспортного средства V1, и вторые маршруты, которые пересекаются с первым маршрутом для рассматриваемого транспортного средства V1. В примере, проиллюстрированном на фиг. 13C, светофор SG1 на перекрестке показывает зеленый свет. В этом случае, светофор SG2 на втором маршруте BV2S, который пересекается под прямым углом с первым маршрутом BV1R для рассматриваемого транспортного средства V1, показывает красный свет (остановка). В связи с этим, другое транспортное средство V2 на втором маршруте не влияет на рассматриваемое транспортное средство V1. Процессор 11 определения определяет то, что уровень приоритета первого маршрута BV1R выше уровня приоритета второго маршрута BV2S. Затем процессор 11 определения учитывает такую ситуацию, что светофор SG2 на втором маршруте BV2S показывает красный свет, и исключает точку пересечения со вторым маршрутом BV2S из событий.
[0123] Ниже поясняется взаимосвязь между рассматриваемым транспортным средством V1 и пешеходным переходом CR1. Когда светофоры для пешеходов SGH1 на пешеходном переходе CR1 показывают красный свет, пешеходы, ожидающие на пешеходном переходе CR1, не могут влиять на рассматриваемое транспортное средство V1. Процессор 11 определения в силу этого определяет то, что пешеходный переход CR1 не представляет собой событие, с которым встречается рассматриваемое транспортное средство V1. Когда светофоры для пешеходов SGH1 на пешеходном переходе CR1 показывают зеленый свет, пешеходы на пешеходном переходе CR1 могут влиять на рассматриваемое транспортное средство V1. Процессор 11 определения в силу этого определяет то, что пешеходный переход CR1 представляет собой событие, с которым встречается рассматриваемое транспортное средство V1. Также могут возникать случаи, в которых светофоры не существуют на пешеходном переходе CR1, или случаи, в которых индикаторы светофоров не могут обнаруживаться. В таких случаях, можно определять то, представляет собой оно или нет событие, посредством оценки светового сигнала светофоров для пешеходов SGH1, которые должны быть противоположными светофору SG1 для транспортных средств, и использования вышеописанных схем.
[0124] Далее поясняется взаимосвязь между рассматриваемым транспортным средством V1 и вторым маршрутом BV3S. Другое транспортное средство V3 движется по прямой по второму маршруту BV3S. Примерный случай должен использоваться для пояснения того, какой светофор SG3 на втором маршруте BV3S, регулирующий движение другого транспортного средства V3, показывает зеленый свет. Согласно правилу дорожного движения, второй маршрут BV3S представляет собой полосу движения, в которой движение по второму маршруту BV3S имеет приоритет по сравнению с движением по первому маршруту BV1R, на котором рассматриваемое транспортное средство V1 поворачивает направо. Процессор 11 определения в силу этого определяет то, что точка QV13 пересечения между вторым маршрутом BV3S и первым маршрутом BV1R представляет собой событие.
В этом примере, процессор 11 определения определяет три события: стоп-линия ST1 на первом маршруте BV1R; точка QV13 пересечения со вторым маршрутом BV3S; и позиция QVJC остановки перед пешеходным переходом CR2.
[0125] Как проиллюстрировано на фиг. 13D, процессор 11 определения компонует события (стоп-линия ST1, точка QV13 пересечения со вторым маршрутом BV3S, позиция QVJC остановки перед пешеходным переходом CR2 и пешеходным переходом CR2) на первом маршруте BV1R в порядке встреч с рассматриваемым транспортным средством V1 в соответствии с относительными расстояниями от рассматриваемого транспортного средства V1 до событий встречи.
[0126] Процессор 21 планирования вождения выполняет определение "продвижения вперед (трогаться с места)" или "остановки (останавливаться)" для каждого события. Например, определение продвижения вперед/остановки выполняется для стоп-линии ST1 на основе состояния светофора SG1 и выполняется для пешеходного перехода CR2 на основе присутствия или отсутствия выполнения перехода пешеходом. Таким образом, для стоп-линии ST1 определение продвижения вперед выполняется, когда светофор SG1 показывает зеленый свет, тогда как определение остановки выполняется, когда светофор SG1 показывает красный свет. Для пешеходного перехода CR1, определение остановки выполняется, когда имеется пешеход, который переходит или начинает переходить, тогда как определение продвижения вперед выполняется, когда отсутствует пешеход, который переходит или начинает переходить. Для второго маршрута, который сливается или пересекается с первым маршрутом для рассматриваемого транспортного средства V1, определение продвижения вперед/остановки выполняется с использованием присутствия или отсутствия другого транспортного средства, движущегося по второму маршруту, и степени приближения к другому транспортному средству, которое сливается или пересекается с первым маршрутом для рассматриваемого транспортного средства в точке пересечения. Схема определения степени приближения является такой, как описано ранее.
[0127] Процессор 21 планирования вождения задает возможные варианты позиций остановки в соответствии с позициями соответствующих событий встречи. В примере, проиллюстрированном на фиг. 13D, процессор 21 планирования вождения задает возможный вариант SP1 позиции остановки около стоп-линии ST1, задает возможный вариант SP2 позиции остановки около центра R0 перекрестка и задает возможный вариант SP3 позиции остановки перед пешеходным переходом CR2. Возможный вариант SP1 позиции остановки задается в качестве расположенной раньше по потоку позиции (позиции на стороне рассматриваемого транспортного средства V1), отделенной от стоп-линии ST1 на предварительно определенное расстояние. Возможный вариант SP2 позиции остановки задается в качестве расположенной раньше по потоку позиции, отделенной от точки QV13 пересечения между вторым маршрутом BV3S и первым маршрутом BV1R на предварительно определенное расстояние. Возможный вариант SP3 позиции остановки задается в качестве позиции перед пешеходным переходом таким образом, что он является отделенным от пешеходного перехода на указанное расстояние. Рассматриваемое транспортное средство может выполнять остановку в любом из трех возможных вариантов позиций остановки, поскольку рассматриваемое транспортное средство не создает помехи транспортным потокам на других маршрутах, если светофор SG1 на первом маршруте BV1R показывает зеленый свет.
[0128] Процессор 21 планирования вождения определяет оптимальный возможный вариант позиции остановки из множества возможных вариантов позиций остановки. Хотя не ограничено конкретным образом, процессор 21 планирования вождения определяет центр перекрестка, который представляет собой возможный вариант позиции остановки, который является ближайшим к рассматриваемому транспортному средству V1 и определяется в качестве "остановки", в качестве позиции остановки. Таким образом, соответствующее событие выбирается из множества возможных вариантов позиций остановки для выполнения остановки посредством рассматриваемого транспортного средства V1, и позиция остановки, подходящая для окружения, которое должно встречаться, в силу этого может определяться.
[0129] Далее описывается вторая схема задания позиции остановки в плане операций вождения.
Ниже приводится описание со ссылкой на примерное окружение, проиллюстрированное на фиг. 14A. Окружение, проиллюстрированное на фиг. 14A, представляет собой окружение, в котором рассматриваемое транспортное средство V1 поворачивает направо на T-образном перекрестке. Процессор 11 определения извлекает первый маршрут BV1, пешеходный переход CR1 и пешеходный переход CR2. Первый маршрут BV1 имеет точку пересечения со вторым маршрутом BV2S. На T-образном перекрестке, движение по второму маршруту BV2S имеет приоритет по сравнению с движением по первому маршруту BV1.
[0130] Процессор 11 определения обращается к информации 224 правил дорожного движения, чтобы извлекать позицию остановки на первом маршруте BV1R, по которому движется рассматриваемое транспортное средство V1. Позиция остановки в правиле дорожного движения представляет собой точку, в которой рассматриваемое транспортное средство V1 встречается с ситуацией, в которой остановка выполняется принудительно. Процессор 11 определения дополнительно извлекает точки, в которых рассматриваемое транспортное средство V1 с большой вероятностью должно встречаться с событиями. В частности, процессор 11 определения извлекает второй маршрут CR1 (пешеходный переход), имеющий точку пересечения с первым маршрутом BV1R, второй маршрут BV2S, второй маршрут BV4S и второй маршрут CR2 (пешеходный переход). Затем процессор 11 определения извлекает одну или более точек пересечений между первым маршрутом BV1R и вторым маршрутом BV4S. В этом примере, извлекаются пять точек пересечений, как проиллюстрировано на фиг. 14A: "точка Q1 перед стоп-линией ST1"; "точка Q2 перед пешеходным переходом CR1"; "точка Q3 перед вторым маршрутом BV2S"; "точка Q4 перед вторым маршрутом BV4S"; и "точка Q5 перед пешеходным переходом CR2".
[0131] Процессор 21 планирования вождения компонует события в порядке Q1→Q2→Q3→Q4→Q5 в соответствии с порядком встреч с рассматриваемым транспортным средством V1 на основе относительных расстояний от рассматриваемого транспортного средства V1 до событий на первом маршруте для рассматриваемого транспортного средства V1. Они могут отображаться на дисплее 251, при необходимости.
[0132] Процессор 11 определения обращается к картографической информации 222, дорожной информации 223 и информации 224 правил дорожного движения, чтобы определять то, имеются или нет события, которые могут представлять собой возможные варианты для позиции остановки. Процессор 11 определения задает события, которые могут влиять на рассматриваемое транспортное средство V1, в качестве событий встречи и не задает события, которые не влияют на рассматриваемое транспортное средство V1, в качестве событий встречи. Окружение этого примера представляет T-образный перекресток без светофоров, и рассматриваемое транспортное средство V1 движется в неприоритетной полосе движения. Все из пяти извлеченных событий в силу этого извлекаются в качестве событий, с которыми встречается рассматриваемое транспортное средство.
[0133] Как проиллюстрировано на фиг. 14B, процессор 21 планирования вождения задает возможные варианты позиций остановки в соответствии с позициями соответствующих событий. Процессор 21 планирования вождения задает каждый возможный вариант позиции остановки в позиции, сдвинутой к расположенной раньше по потоку стороне из каждой из точек Q1-Q5 на определенное расстояние. В этом примере, процессор 21 планирования вождения задает "возможный вариант SP1 позиции остановки, соответствующий стоп-линии ST1", "возможный вариант SP2 позиции остановки, соответствующий пешеходному переходу CR1", "возможный вариант SP3 позиции остановки, соответствующий точке пересечения со вторым маршрутом BV2S", "возможный вариант SP4 позиции остановки, соответствующий точке пересечения со вторым маршрутом BV4S" и "возможный вариант SP5 позиции остановки, соответствующий пешеходному переходу CR2" в качестве возможных вариантов позиций остановки.
[0134] Процессор 21 планирования вождения определяет соответствующую позицию остановки из множества возможных вариантов SP1-SP5 позиций остановки, включенных в одно окружение. Хотя не ограничено конкретным образом, процессор 21 планирования вождения определяет возможный вариант SP1 позиции остановки, который представляет собой возможный вариант позиции остановки, который является ближайшим к рассматриваемому транспортному средству V1, в качестве позиции остановки.
[0135] Когда, после управления рассматриваемым транспортным средством V1 с возможностью выполнять остановку в возможном варианте SP1 позиции остановки, процессор 21 планирования вождения обнаруживает пешехода на пешеходном переходе CR1, затем процессор 21 планирования вождения управляет рассматриваемым транспортным средством V1 с возможностью выполнять остановку снова в возможном варианте SP2 позиции остановки, соответствующем пешеходному переходу CR1.
[0136] Когда два или более возможных вариантов позиций остановки находятся близко друг к другу (в пределах предварительно определенного расстояния), процессор 21 планирования вождения унифицирует их. Это позволяет уменьшать нагрузку по обработке.
[0137] Когда пешеходы не существуют на пешеходном переходе CR1, процессор 21 планирования вождения управляет рассматриваемым транспортным средством V1 с возможностью продвигаться вперед к возможному варианту SP3 позиции остановки и выполнять остановку в нем. Когда пешеход обнаруживается только на пешеходном переходе CR2, процессор 21 планирования вождения определяет возможный вариант SP5 позиции остановки, соответствующий пешеходному переходу CR2, в качестве позиции остановки.
[0138] Когда другое транспортное средство V4 движется по второму маршруту BV4S и может влиять на движение рассматриваемого транспортного средства V1, процессор 21 планирования вождения выполняет следующий процесс. Процессор 21 планирования вождения определяет то, включает или нет заданное множество возможных вариантов позиций остановки в себя возможный вариант позиции остановки по маршруту, который находится в другом направлении относительно направления движения рассматриваемого транспортного средства V1. В примере, проиллюстрированном на фиг. 14B, возможный вариант SP4 позиции остановки существует в области полосы движения второго маршрута BV2S, который находится в другом направлении относительно направления первого маршрута BV1R. Процессор 21 планирования вождения в силу этого оценивает то, что позиция остановки для рассматриваемого транспортного средства V1 влияет на другое транспортное средство V2. Процессор 21 планирования вождения определяет возможный вариант SP3 позиции остановки, расположенный до (на стороне раньше по потоку) возможного варианта SP4 позиции остановки, в качестве позиции остановки. Когда возможный вариант SP3 позиции остановки не находится в пределах области возможности движения второго маршрута, возможный вариант SP3 позиции остановки определяется в качестве позиции остановки. Согласно этому примеру, когда рассматриваемое транспортное средство V1 поворачивает направо и въезжает на приоритетную дорогу T-образного перекрестка с неприоритетной дороги, позиция остановки может определяться с учетом другого транспортного средства V2, движущегося справа налево по второму маршруту BV2S, в качестве приоритетного маршрута T-образного перекрестка, и другого транспортного средства V4, движущегося слева направо по второму маршруту BV4S. В силу этого остановка является возможной в естественной позиции остановки, которая не влияет на другие транспортные средства V2 и V4.
[0139] Ниже описывается третья схема задания позиции остановки в плане операций вождения.
Ниже приводится описание со ссылкой на примерное окружение, проиллюстрированное на фиг. 15. Окружение, проиллюстрированное на фиг. 15, представляет собой окружение, в котором на дороге после правого поворота образуется пробка. Когда скорость другого транспортного средства, сливающегося с первым маршрутом в позиции любых из возможных вариантов позиций остановки, составляет указанную скорость или меньше, процессор 21 планирования вождения определяет то, что на первом маршруте для рассматриваемого транспортного средства V1 образуется пробка. В этом примере, даже в таком окружении пробки, позиция остановки другого транспортного средства учитывается, чтобы определять соответствующую позицию остановки для рассматриваемого транспортного средства. Процессор 11 определения извлекает первый маршрут BV1, пешеходный переход CR1 и пешеходный переход CR2.
[0140] В этом примере, проезд определяется для стоп-линии ST1, поскольку светофор показывает зеленый свет. Относительно точки пересечения с другим транспортным средством V3, которое движется по прямой по встречной полосе движения, предполагается, что определение "продвижения вперед" выполняется в этом примере, поскольку другое транспортное средство V3 с меньшей вероятностью должно приближаться к рассматриваемому транспортному средству V1. Тем не менее, еще одно другое транспортное средство V43 существует перед пешеходным переходом CR2, и в силу этого отсутствует пространство для выполнения остановки посредством рассматриваемого транспортного средства V1 перед пешеходным переходом CR2.
[0141] Процессор 21 планирования вождения выполняет определение в отношении того, является или нет остановка возможной в "точке Q4 пересечения со вторым маршрутом BV3S", что представляет собой событие до точки Q5 пересечения, в которой рассматриваемое транспортное средство встречается с событием. В этом примере, при условии, что показан красный свет на пешеходном переходе CR1, и пешеходы не существуют на пешеходных переходах CR1 и CR2, определение продвижения вперед выполняется для пешеходных переходов CR1 и CR2.
[0142] Процессор 21 планирования вождения задает возможные варианты SP1-SP5 позиций остановки на основе позиций точек Q1-Q5 пересечений, соответственно. Процессор 21 планирования вождения допускает возможный вариант SP4 позиции остановки, соответствующий точке Q4 пересечения до точки Q5 пересечения, в качестве позиции остановки. Процессор 21 планирования вождения определяет то, включен или нет возможный вариант SP4 позиции остановки в полосу движения второго маршрута BV2S, на котором направление движения отличается от направления движения по первому маршруту BV1R. Возможный вариант SP4 позиции остановки включен в полосу движения второго маршрута BV2S, и позиция остановки в силу этого может создавать помехи движению другого транспортного средства V2, которое движется по второму маршруту BV2S. В частности, если пробка продолжается, и сигнал светофора изменяется с зеленого света на красный свет, позиция остановки для рассматриваемого транспортного средства V1 влияет на движение другого транспортного средства V2.
[0143] В связи с этим, возможный вариант SP3 позиции остановки до возможного варианта SP4 позиции остановки предварительно определяется в качестве позиции остановки. Процессор 21 планирования вождения выполняет идентичное определение также для возможного варианта SP3 позиции остановки. Возможный вариант SP3 позиции остановки также создает помехи второму маршруту BV2S, так что возможный вариант SP2 позиции остановки до возможного варианта SP3 позиции остановки определяется в качестве возможного варианта. Здесь, возможный вариант SP2 позиции остановки создает помехи пешеходному переходу CR1, который представляет собой второй маршрут. Таким образом, стоп-линия ST1 в конечном счете определяется в качестве позиции остановки.
Таким образом, в окружении, в котором в зоне, расположенной перед перекрестком, образуется пробка, когда рассматриваемое транспортное средство V1 поворачивает направо на перекрестке, соответствующая позиция остановки определяется из числа возможных вариантов позиций остановки с учетом позиции остановки другого транспортного средства V43, и рассматриваемое транспортное средство V1 в силу этого может управляться с возможностью выполнять остановку в позиции остановки, которая не влияет на другие транспортные средства.
[0144] При составлении плана операций вождения, процессор 21 планирования вождения может определять то, является или нет возможной смена полосы движения. Когда объект обнаруживается впереди рассматриваемого транспортного средства V1, процессор 21 планирования вождения вычисляет расстояние от рассматриваемого транспортного средства V1 до объекта. Помимо этого или альтернативно, процессор 21 планирования вождения может учитывать скорость, чтобы вычислять оставшееся время для достижения объекта посредством рассматриваемого транспортного средства V1. Процессор 21 планирования вождения выполняет определение в отношении вероятности смены полосы движения, т.е. того, является или нет возможной смена полосы движения, посредством определения того, обеспечивается или нет достаточное относительное расстояние X между рассматриваемым транспортным средством и другим транспортным средством, движущимся впереди. В примере, процессор 21 планирования вождения задает расстояние XMIN в качестве порогового значения для определения того, что смена полосы движения является возможной, и определяет то, удовлетворяется или нет X>XMIN, где X представляет расстояние от рассматриваемого транспортного средства до транспортного средства, подлежащего обгону. Процессор 21 планирования вождения определяет то, что рассматриваемое транспортное средство V1 может сменять полосу движения, когда X>XMIN удовлетворяется, и в противном случае определяет то, что смена полосы движения является невозможной. Пороговое значение XMIN представляет собой расстояние, требуемое для обгона другого транспортного средства, движущегося впереди, посредством рассматриваемого транспортного средства V1, или допустимое расстояние, которое, возможно, должно учитываться, когда рассматриваемое транспортное средство V1 движется в этом окружении движения.
[0145] Следует понимать, что скорость транспортного средства может учитываться, чтобы вычислять время для достижения в качестве замены для расстояния. В примере, процессор 21 планирования вождения задает время для достижения TMIN в качестве порогового значения для определения того, что смена полосы движения является возможной, и определяет то, удовлетворяется или нет T>TMIN, где T представляет оставшееся время для достижения транспортного средства, подлежащего обгону, посредством рассматриваемого транспортного средства. Процессор 21 планирования вождения определяет то, что рассматриваемое транспортное средство V1 может сменять полосу движения, когда T>TMIN удовлетворяется, и в противном случае определяет то, что смена полосы движения является невозможной. Пороговое значение TMIN представляет собой время, требуемое для обгона другого транспортного средства, движущегося впереди, посредством рассматриваемого транспортного средства V1, или допустимое время, которое, возможно, должно учитываться, когда рассматриваемое транспортное средство V1 движется в этом окружении движения.
В одном или более вариантов осуществления настоящего изобретения, после того, как события компонуются в порядке встреч с рассматриваемым транспортным средством V1 на основе относительных расстояний между событиями и рассматриваемым транспортным средством V1, выполняется определение в отношении того, является или нет возможной смена полосы движения. Это обеспечивает возможность рассматриваемому транспортному средству реагировать на обгон другого транспортного средства с учетом транспортных средств, смежных с первым маршрутом для рассматриваемого транспортного средства, и транспортных средств, движущихся впереди рассматриваемого транспортного средства.
[0146] Далее описывается процедура процесса, выполняемого в системе 1 содействия при движении согласно одному или более вариантов осуществления настоящего изобретения, со ссылкой на блок-схему последовательности операций способа по фиг. 16. Следует понимать, что общее представление обработки на каждом этапе является таким, как описано выше. Здесь главным образом описывается последовательность операций процесса, и далее описывается пример конкретного процесса.
[0147] Во-первых, на этапе S1, процессор 11 определения получает информацию рассматриваемого транспортного средства для рассматриваемого транспортного средства V1. Информация рассматриваемого транспортного средства включает в себя позицию, скорость/ускорение и направление движения рассматриваемого транспортного средства V1.
[0148] На этапе S2, процессор 11 определения получает информацию объектов. Информация объектов включает в себя присутствие или отсутствие объекта, существующего рядом с рассматриваемым транспортным средством V1, атрибут объекта (стационарный объект или движущийся объект), позицию объекта, скорость/ускорение объекта и направление перемещения объекта. Информация объектов может получаться из устройства 230 обнаружения объектов и/или навигационного устройства 220.
[0149] На этапе S3, процессор 11 определения определяет то, изменяется или нет ближайшее окружение встречи, с которым должно встречаться рассматриваемое транспортное средство V1. Окружение встречи представляет собой окружение, такое как перекресток, через который должно проезжать рассматриваемое транспортное средство. Процессор 11 определения определяет то, изменяется или нет маршрут движения, и то, проезжает или нет рассматриваемое транспортное средство через окружение встречи, которое должно определяться непосредственно перед этим. Это обусловлено тем, что должна определяться необходимость задания нового окружения встречи. Когда текущая позиция рассматриваемого транспортного средства V1 принадлежит маршруту, который уже вычислен, процессор 11 определения определяет то, что маршрут движения не изменяется. Когда текущая позиция рассматриваемого транспортного средства V1 не принадлежит маршруту, который уже вычислен, процессор 11 определения определяет то, что маршрут движения изменяется.
Когда текущая позиция рассматриваемого транспортного средства V1 не принадлежит области, которая задана в качестве окружения встречи непосредственно перед этим, процессор 11 определения определяет то, что рассматриваемое транспортное средство V1 проезжает через окружение встречи. Когда текущая позиция рассматриваемого транспортного средства V1 принадлежит области, которая задана в качестве окружения встречи непосредственно перед этим, процессор 11 определения определяет то, что рассматриваемое транспортное средство V1 еще не проехало через окружение встречи.
[0150] Когда маршрут движения изменяется, либо когда рассматриваемое транспортное средство V1 проезжает через окружение встречи, процессор 11 определения определяет то, что окружение встречи изменяется, и выполняет процесс этапов S4-S9. Когда маршрут движения не изменяется, и рассматриваемое транспортное средство V1 еще не проехало через окружение встречи, процессор 11 определения определяет то, что окружение встречи не изменяется, и процедура переходит к этапу S11.
[0151] На этапе S4, процессор 11 определения вычисляет первый маршрут, по которому движется рассматриваемое транспортное средство V1. Также может использоваться первый маршрут, вычисленный посредством навигационного устройства 220. Первый маршрут указывается посредством идентификатора дороги, идентификатора полосы движения, идентификатора узла и/или идентификатора соединения. Этот идентификатор дороги, идентификатор полосы движения, идентификатор узла и идентификатор соединения задается в картографической информации 222 и/или дорожной информации 223.
[0152] На этапе S5, процессор 11 определения задает окружение, с которым встречается рассматриваемое транспортное средство V1, движущееся по первому маршруту. Окружение встречи представляет собой область, которая включает в себя точки, в которых существуют точки пересечений между первым маршрутом и другими маршрутами. Форма точки пересечения с первым маршрутом не ограничена и может представлять собой любое из точки слияния, точки разветвления, перекрестка, T-образного перекрестка и смежной точки. Окружение встречи представляет собой область, которая включает в себя точки, в которых остановка требуется на первом маршруте, в соответствии с информацией 224 правил дорожного движения. Процессор 11 определения обращается к картографической информации 222, дорожной информации 223 и/или информации 224 правил дорожного движения, чтобы задавать область R1, которая представляет собой окружение, в котором, как проиллюстрировано на фиг. 2B, рассматриваемое транспортное средство V1 с большой вероятностью должно встречаться с событиями. Примеры окружений, с которыми сталкивается рассматриваемое транспортное средство V1, включают в себя область около перекрестка, область около точки слияния полос движения, область около пешеходного перехода, область около стоп-линии, область около железнодорожного переезда и область около стройплощадки.
[0153] На этапе S6, процессор 11 определения извлекает вторые маршруты, имеющие точки пересечений с первым маршрутом. Процессор 11 определения обращается к картографической информации 222 и/или дорожной информации 223, чтобы извлекать вторые маршруты, имеющие точки пересечений с первым маршрутом. Процессор 11 определения обращается к информации соединений (информации узлов), заданной в картографической информации 222. В местоположении, в котором два или более маршрута пересекаются друг с другом, информация соединений (информация узлов) соединяется с двумя или более других соединений. Процессор 11 определения извлекает вторые маршруты, которые пересекаются с первым маршрутом, из ситуации соединения информации соединений (информации узлов).
[0154] На этапе S7, процессор 11 определения извлекает события, с которыми встречается рассматриваемое транспортное средство V1 в заданном окружении встречи. Процессор 11 определения извлекает точки пересечений между первым маршрутом и вторыми маршрутами в качестве событий. Следует понимать, что в точке слияния маршрутов, два или более соединений соединяются с другим соединением. На перекрестке, окрестность въезда на перекресток соответствует точке разветвления полос движения, в то время как окрестность выезда с перекрестка соответствует точке слияния полос движения. Таким образом, точка, в которой соединение соединяется с двумя или более других соединений, может извлекаться в качестве события, в котором первый маршрут и один или более вторых маршрутов пересекаются друг с другом на стороне выезда перекрестка. Другими словами, один или более вторых маршрутов могут обнаруживаться на выезде с перекрестка посредством обнаружения наличия точки, в которой соединение соединяется с двумя или более других соединений. Помимо этого, информация соединений задается также с пешеходным переходом, и пешеходный переход, пересекающийся с первым маршрутом, может обнаруживаться в качестве второго маршрута посредством определения пересечения между соединением первого маршрута и соединением пешеходного перехода. Процессор 11 определения извлекает точки, в которых остановка требуется на первом маршруте в соответствии с информацией 224 правил дорожного движения, в качестве событий.
[0155] Позиции извлеченных событий сохраняются в ассоциации с маршрутами. Позиции извлеченных событий также могут сохраняться в ассоциации с картографической информацией 222 и/или дорожной информацией 223. При составлении плана операций вождения, который должен выполняться позднее, действие вождения определяется для позиции каждого извлеченного события.
[0156] На этапе S8, процессор 11 определения перекомпонует извлеченное множество событий в порядке встреч с рассматриваемым транспортным средством V1.
[0157] На этапе S9, процессор 31 управления выводом отображает перекомпонованное множество событий на дисплее 251. Помимо этого или альтернативно, процессор 31 управления выводом может выводить перекомпонованное множество событий посредством голоса с использованием динамика 252.
[0158] На этапе S11, процессор 21 планирования вождения извлекает объекты, с которыми встречается рассматриваемое транспортное средство, движущееся по первому маршруту. Процессор 21 планирования вождения извлекает информацию относительно объектов, существующих на вторых маршрутах. Эта информация включена в информацию объектов, полученную на этапе S2. В примере, проиллюстрированном на фиг. 2G, извлекаются другое транспортное средство V2, движущееся по второму маршруту BV2S, и другое транспортное средство V3, движущееся по второму маршруту BV3R.
[0159] На этапе S12, процессор 21 планирования вождения ассоциирует объекты с событиями или маршрутами. Информация объектов также может быть ассоциирована с идентификаторами маршрутов, поскольку если маршруты могут указываться, точки пересечений с первым маршрутом могут сужаться. Информация объектов другого транспортного средства V2 ассоциирована с идентификатором второго маршрута BV2S или идентификатором точки QV12 пересечения (позиционной информацией). Информация объектов другого транспортного средства V3 ассоциирована с идентификатором второго маршрута BV3R или точки QV12 пересечения.
[0160] На этапе S13, процессор 21 планирования вождения определяет действие вождения для каждого события. Действие вождения определяется на основе вероятности контакта между рассматриваемым транспортным средством V1 и объектом, как описано выше. Вероятность контакта определяется на основе расстояния между рассматриваемым транспортным средством V1 и объектом или оставшегося времени для вхождения в контакт с объектом посредством рассматриваемого транспортного средства V1.
[0161] На этапе S14, процессор 21 планирования вождения определяет то, существует или нет событие, определенное с "остановкой", во множестве событий, которые принадлежат области R1, заданной в качестве окружения. Процессор 21 планирования вождения определяет то, существует или нет, по меньшей мере, одно событие, определенное с "остановкой", в области R1, заданной в качестве окружения.
[0162] Когда, на этапе S14, выполняется определение в отношении того, что событие, определенное с "остановкой", не существует, процедура переходит к этапу S16, на котором составляется план операций вождения с "проездом" через область R1, заданную в качестве окружения. Когда, на этапе S14, одно или более событий, определенных с "остановкой", существуют, процедура переходит к этапу S15, на котором составляется план операций вождения в области R1, заданной в качестве окружения. В частности, содержимое вождения из "продвижения вперед" или "остановки" определяется для каждого из извлеченных событий, и позиция остановки задается в соответствии с позициями событий.
[0163] После этапов S15 и S16 выполняется этап S17, на котором управление вождением выполняется на основе запланированного плана операций вождения. Контроллер 210 транспортного средства используется для управления рассматриваемым транспортным средством V1 с возможностью выполнять остановку в позиции события, определенного с "остановкой", и управления рассматриваемым транспортным средством V1 с возможностью продвигаться вперед в позиции события, определенного с "продвижением вперед".
[0164] Фиг. 17 является блок-схемой последовательности операций способа, иллюстрирующей вложенную процедуру процесса, проиллюстрированного на фиг. 16, для составления плана операций вождения.
Как проиллюстрировано на фиг. 17, на этапе S21, процессор 21 планирования вождения задает возможные варианты позиций остановки в соответствии с позициями соответствующих событий. Если, на этапе S22, два или более возможных вариантов позиций остановки находятся близко друг к другу в пределах предварительно определенного расстояния, процессор 21 планирования вождения унифицирует их. На этапе S23, процессор 21 планирования вождения определяет достоверность возможных вариантов позиций остановки. В частности, процессор 21 планирования вождения определяет то, существует либо нет позиция для каждого возможного варианта позиции остановки в области второго маршрута, и то, не существует либо нет позиция для каждого возможного варианта позиции остановки в области запрета парковки и остановки.
[0165] Когда, на этапе S24, имеется определенное число возможных вариантов позиций остановки после сужения, процедура переходит к этапу S25, на котором процессор 21 планирования вождения выбирает возможный вариант позиции остановки, с которым сначала встречается рассматриваемое транспортное средство V1. На этапе S26, процессор 21 планирования вождения определяет позицию остановки.
[0166] Фиг. 18 является блок-схемой последовательности операций способа, иллюстрирующей вложенную процедуру процесса, проиллюстрированного на фиг. 17, для сужения возможных вариантов позиций остановки.
На этапе S31, процессор 21 планирования вождения определяет то, находится или нет возможный вариант позиции остановки в возможной для остановки области (в области, в которой остановка является возможной). Когда возможный вариант позиции остановки не находится в возможной для остановки области, остановка не предпочитается, и процедура переходит к этапу S34, на котором возможный вариант позиции остановки удаляется из данных возможных вариантов. Также, когда возможный вариант позиции остановки находится в области запрета парковки и остановки, возможный вариант позиции остановки удаляется из данных возможных вариантов. С другой стороны, когда возможный вариант позиции остановки находится в возможной для остановки области, процедура переходит к этапу S32.
[0167] На этапе S32, процессор 21 планирования вождения определяет то, находится или нет рассматриваемое транспортное средство в области первого маршрута. Когда возможный вариант позиции остановки не находится в области первого маршрута, рассматриваемое транспортное средство может оказывать негативное влияние на другое транспортное средство, движущееся по другому маршруту, или на пешехода, идущего по пешеходному переходу, который представляет собой другой маршрут. Следовательно, процедура переходит к этапу S35, на котором позиция возможного варианта позиции остановки сдвигается к расположенной раньше по потоку стороне (стороне рассматриваемого транспортного средства). С другой стороны, когда возможный вариант позиции остановки находится в области первого маршрута, процедура переходит к этапу S33.
[0168] На этапе S33, процессор 21 планирования вождения определяет то, меньше или нет скорость транспортного средства для другого транспортного средства, сливающегося с первым маршрутом, предварительно определенного значения. Предварительно определенное значение является пороговым значением скорости для определения возникновения пробки. Когда скорость другого транспортного средства является небольшой, может образовываться дорожная пробка после слияния. Когда скорость транспортного средства для другого транспортного средства меньше предварительно определенного значения, процедура переходит к этапу S36.
[0169] На этапе S33, процессор 21 планирования вождения учитывает вероятность того, что рассматриваемое транспортное средство V1 не может выполнять остановку в соответствующей позиции вследствие пробки, возникающей в сливающемся маршруте, и предварительно сдвигает возможный вариант позиции остановки к расположенной раньше по потоку стороне (стороне рассматриваемого транспортного средства). Когда скорость транспортного средства для другого транспортного средства не меньше предварительно определенного значения, процедура переходит к этапу S24. Процесс этапов S24 в S26 является таким, как описано со ссылкой на фиг. 17.
[0170] Ниже описывается другой вариант осуществления относительно процесса извлечения событий.
Устройство 10 определения окружения согласно одному или более вариантов осуществления настоящего изобретения включает в себя процессор 11 определения. Другие конфигурации, к примеру, бортовая аппаратура 200, являются такими, как описано выше.
[0171] Процессор 11 определения согласно одному или более вариантов осуществления настоящего изобретения извлекает первый маршрут, по которому движется рассматриваемое транспортное средство, и второй маршрут, имеющий точку пересечения с первым маршрутом.
Процессор 11 определения согласно одному или более вариантов осуществления настоящего изобретения вычисляет линию оценки движения с применением временного ряда рассматриваемого транспортного средства V1, движущегося по первому маршруту. Линия оценки движения включает в себя элементы на временной оси. Линия оценки движения представляется посредством набора информационных элементов относительно позиции рассматриваемого транспортного средства V1, которое перемещается, т.е. набора элементов позиционной информации, которые варьируются по мере прохождения времени. Изменение позиции рассматриваемого транспортного средства V1 оценивается на основе текущей позиции и информации места назначения, которая вводится в навигационное устройство 220. Процессор 11 определения может заставлять навигационное устройство 220 выполнять вычисление линии оценки движения и может получать результат. Линия оценки движения может представлять собой непрерывный сегмент линии и также может представлять собой дискретные сегменты линии.
[0172] Помимо этого или альтернативно, процессор 11 определения вычисляет полосу оценки движения с применением временного ряда рассматриваемого транспортного средства V1, движущегося по первому маршруту. Полоса оценки движения включает в себя элементы на временной оси. Полоса оценки движения представляется посредством набора информационных элементов относительно позиции рассматриваемого транспортного средства V1, которое перемещается, т.е. набора элементов позиционной информации, которые варьируются по мере прохождения времени. Полоса оценки движения отличается от линии оценки движения тем, что полоса оценки движения представляет позицию рассматриваемого транспортного средства V1 посредством плоскости, но содержимое информации является идентичным. Полоса оценки движения может получаться посредством увеличения ширины линии оценки движения вдоль определенной плоскости. Процессор 11 определения может заставлять навигационное устройство 220 выполнять вычисление полосы оценки движения и может получать результат.
[0173] Процессор 11 определения согласно одному или более вариантов осуществления настоящего изобретения вычисляет линию оценки движения с применением временного ряда рассматриваемого транспортного средства V1, движущегося по первому маршруту, и извлекает событие, с которым встречается рассматриваемое транспортное средство, на основе позиций точек пересечений между линией оценки движения и вторым маршрутом, имеющим точку пересечения с первым маршрутом. Время учитывается, чтобы извлекать событие из позиций точек пересечений с линией оценки движения, и в силу этого может извлекаться соответствующее событие.
[0174] Процессор 11 определения согласно одному или более вариантов осуществления настоящего изобретения извлекает событие на основе позиции точки пересечения, расположенной на самой ранней по потоку стороне вдоль направления движения другого транспортного средства, движущегося по второму маршруту, из точек пересечений между линией оценки движения и вторым маршрутом. Событие извлекается на основе позиции точки пересечения, в которой линия оценки движения и второй маршрут пересекаются друг с другом в самое первое время. Направление перемещения другого транспортного средства, движущегося по второму маршруту, учитывается, и соответствующее событие в силу этого может извлекаться с учетом времени.
[0175] Процессор 11 определения согласно одному или более вариантов осуществления настоящего изобретения вычисляет полосу оценки движения с применением временного ряда рассматриваемого транспортного средства, движущегося по первому маршруту, и извлекает событие, с которым встречается рассматриваемое транспортное средство, на основе позиции точки пересечения, которая получается в самое первое время и расположена на самой ранней по потоку стороне вдоль направления движения по второму маршруту из точек пересечений между полосой оценки движения и вторым маршрутом. Точки пересечений между вторым маршрутом и полосой оценки движения составляют один или более сегментов линии. Из точек пересечений, используется точка пересечения, расположенная на самой ранней по потоку стороне вдоль направления движения по второму маршруту, и одно событие в силу этого может извлекаться с учетом времени.
[0176] Когда рассматриваемое транспортное средство движется в области первого маршрута, в которой полоса движения не задается, процессор 11 определения согласно одному или более вариантов осуществления настоящего изобретения обращается к картографической информации 222, чтобы формировать линию оценки движения или полосу оценки движения. Это обеспечивает возможность извлечения события даже в такой области, как перекресток, в которой не задается полоса движения.
[0177] Процессор 11 определения согласно одному или более вариантов осуществления настоящего изобретения обращается к картографической информации 222, в которой задаются узлы и соединения, чтобы извлекать первый узел, ассоциированный с первым маршрутом, по которому движется рассматриваемое транспортное средство. Первый узел задается со взаимосвязью соединений с другими узлами. Процессор 11 определения выбирает маршрут, которому принадлежат другие узлы, в качестве второго маршрута. Другие узлы задаются со взаимосвязью соединений с первым узлом. Можно выполнять поиск второго маршрута с использованием взаимосвязи соединений с узлами. В силу этого можно выполнять поиск второго маршрута с низкой нагрузкой по обработке.
[0178] Когда два или более извлеченных событий, с которыми сталкивается рассматриваемое транспортное средство V1, находятся близко друг к другу в пределах предварительно определенного расстояния, процессор 11 определения согласно одному или более вариантов осуществления настоящего изобретения унифицирует два или более событий в одно событие. События, близкие друг к другу, организуются, чтобы за счет этого предотвращать повторение продвижения вперед/остановки, и может выполняться плавное вождение.
[0179] Процессор 21 планирования вождения согласно одному или более вариантов осуществления настоящего изобретения определяет либо действие продвижения вперед, либо действие остановки для каждого из событий, извлеченных посредством процессора 11 определения. Это обеспечивает извлечение событий без некомфортного ощущения относительно времени.
[0180] Ниже описывается пример конкретного процесса в окружении, проиллюстрированном на фиг. 19. В окружении, проиллюстрированном на фиг. 19, рассматриваемое транспортное средство V1 поворачивает налево и въезжает на приоритетную дорогу T-образного перекрестка с неприоритетной дороги вдоль первого маршрута BV1L.
[0181] Фиг. 20 является блок-схемой последовательности операций способа, иллюстрирующей процедуру управления в этом процессе. Ниже описывается процедура управления вместе с процессом извлечения событий.
[0182] На этапе S101, процессор 11 определения получает текущую позицию рассматриваемого транспортного средства из устройства 221 обнаружения позиции. На этапе S102, процессор 11 определения получает первый маршрут для рассматриваемого транспортного средства V1. Первый маршрут получается из текущей позиции и места назначения. Первый маршрут указывается не только с дорогой, но также и с полосой движения, которая включает в себя информацию направления. То же применимо ко вторым маршрутам. Процессор 11 определения заставляет навигационное устройство 220 вычислять маршруты. На этапе S103, процессор 11 определения получает позиционную информацию границы (такую как разделительные линии, бордюрные камни и дорожные ограждения) первого маршрута, по которому движется рассматриваемое транспортное средство. Процессор 11 определения может получать информацию относительно границы первого маршрута из картографической информации 222 или дорожной информации 223.
[0183] В некоторых областях, таких как перекрестки и точки слияния, информация границ полос движения не существует на дороге. Процессор 11 определения в силу этого создает информацию виртуальных границ для области, которая не имеет информации относительно границы. Процессор 11 определения создает виртуальную границу полосы движения из информации границ (такой как разделительные линии, бордюрные камни и дорожные ограждения) полосы движения вокруг перекрестка и информации места назначения полосы движения. В примере, как проиллюстрировано на фиг. 21, процессор 11 определения создает виртуальную границу LN0 для полосы движения в зоне, в которой не присутствуют разделительные линии, с использованием элементов LN1 и LN2 информации границ полос движения вокруг перекрестка, элементов SL1 и SL2 информации границ бордюрных камней и информации левого поворота на первом маршруте BV1L. Как проиллюстрировано на фиг. 21, процессор 11 определения может создавать виртуальную полосу движения посредством соединения элементов информации полос движения "полосы LN1 движения по первому маршруту перед поворотом налево" и "полоса LN2 движения по первому маршруту после поворота налево".
[0184] На этапе S104, процессор 11 определения вычисляет линию/полосу оценки движения, которая представляет собой позиционную информацию в отношении того, где должно быть расположено в будущем рассматриваемое транспортное средство V1, движущееся по первому маршруту. Линия/полоса оценки движения ассоциирована на временной оси с точками, в которые рассматриваемое транспортное средство предположительно должно перемещаться. Линия или полоса оценки движения, вычисленная в данном документе, не обязательно может представлять собой маршрут, заданный посредством непрерывной функции, и также может представлять собой маршрут, заданный посредством разрывной функции. Процессор 11 определения может вычислять линию или полосу оценки движения с использованием виртуальных граничных линий полос движения, проиллюстрированных на фиг. 21. Помимо этого или альтернативно, как проиллюстрировано на фиг. 22, процессор 11 определения может вычислять линию оценки движения с использованием средних точек в направлении ширины между виртуальными граничными линиями полос движения и также может вычислять полосу оценки движения посредством указания области, заданной с предварительно определенной шириной от центров виртуальных полос движения.
[0185] На этапе S105, процессор 11 определения вычисляет второй маршрут, имеющий точку пересечения с первым маршрутом. Процессор 11 определения вычисляет второй маршрут с использованием информации узлов/соединений, ассоциированной с первым маршрутом в картографической информации 222. Например, как проиллюстрировано на фиг. 23, процессор 11 определения считывает множество узлов/соединений, которые выражают T-образный перекресток. В картографической информации 222, соединительный порт каждого узла представляет точку соединения на перекрестке. Примеры узлов на перекрестке включают в себя узлы, в которых соединения ответвляются от одного узла до двух или более узлов, и узлы, в которых соединения унифицируются в один узел из двух или более узлов. В этом процессе, внимание фокусируется на узлах, в которых соединения унифицируются в один узел из двух или более узлов. Это обусловлено тем, что соединение, которое с определенной вероятностью должно соединяться с первым маршрутом, может извлекаться относительно узлов, в которых собираются места назначения числа соединений. Таким образом, может извлекаться второй маршрут, который может создавать помехи первому маршруту для рассматриваемого транспортного средства V1.
[0186] На этапе S106, процессор 11 определения получает сегмент пересекающихся линий между линией оценки движения и вторым маршрутом. Как проиллюстрировано на фиг. 24A, сегмент Z пересекающихся линий представляет собой сегмент линии, который имеет конечную длину. Аппаратура 100 содействия при движении учитывает информацию вплоть до сотен метров впереди, чтобы обеспечивать возможность рассматриваемому транспортному средству V1 двигаться при реакции на события, которые должны встречаться. В таком случае, длина линии Z оценки движения составляет сотни метров. С другой стороны, второй маршрут представляет собой область, которая продолжается до тех пор, пока продолжается полоса движения. Сегмент пересекающихся линий, который должен получаться в данном документе, представляется посредством точек пересечений между "линией Z оценки движения" и "вторым маршрутом BV". В примере, проиллюстрированном на фиг. 24A, сегмент пересекающихся линий находится между точкой A и точкой B. Когда длина "линии Z оценки движения" определяется на основе длины соединения, длина "линии Z оценки движения" является конечной длиной от одного конца одного соединения до другого конца. Со ссылкой на длину соединения, проиллюстрированного на фиг. 23, длина "линии Z оценки движения" является длиной от точки A до точки B', как проиллюстрировано на фиг. 24B.
[0187] На этапе S107, процессор 11 определения определяет направление движения по второму маршруту BV2S. Направление движения может определяться из направления соединения, как указано посредством картографической информации 222. Второй маршрут обеспечивает возможность движения в направлении стрелки от правой стороны к левой стороне на чертеже при просмотре из рассматриваемого транспортного средства V1.
[0188] На этапе S108, процессор 11 определения выбирает событие в точке, которая является ближайшей к расположенной раньше по потоку стороне (правой стороне на чертеже), в полученном сегменте пересекающихся линий между вторым маршрутом и линией оценки движения, в направлении, вдоль которого другое транспортное средство, движущееся по второму маршруту BV2S, приближается к рассматриваемому транспортному средству.
[0189] В сегменте AB линии, проиллюстрированном на фиг. 24B, точка, которая является ближайшей к расположенной раньше по потоку стороне (правой стороне на чертеже) в направлении движения по второму маршруту BV2S, представляет собой точку A. Эта точка расположена в самой правой точке из точек, которые составляют сегмент AB линии. Этот пример представляет случай левого поворота рассматриваемого транспортного средства V1, так что он является противоположным повороту направо.
[0190] Точка A, выбранная в качестве события, может позиционироваться на стороне дополнительно раньше по потоку, чем пешеходный переход CR4. Здесь, если время не учитывается, любая из точек A и B', проиллюстрированных на фиг. 24B, может представлять собой событие. Извлечение точки B' в качестве события означает то, что выполняется определение в отношении того, что событие имеет место после проезда через пешеходный переход. Это противоречит фактическому порядку встреч с рассматриваемым транспортным средством, и возникает проблема в том, что определение действия на основе порядка встреч с рассматриваемым транспортным средством не может выполняться. Напротив, согласно одному или более вариантов осуществления настоящего изобретения, точка A перед пешеходным переходом CR4 может извлекаться в качестве события, поскольку учитывается порядок встреч с рассматриваемым транспортным средством V1.
[0191] Согласно этому процессу, когда рассматриваемое транспортное средство поворачивает налево и въезжает на приоритетную дорогу T-образного перекрестка с неприоритетной дороги, событие может задаваться в качестве соответствующей позиции с учетом направления движения транспортного средства, движущегося слева направо по второму маршруту, который представляет собой приоритетный маршрут T-образного перекрестка. Таким образом, событие, с которым встречается рассматриваемое транспортное средство, может получаться без несоответствия с порядком встреч с рассматриваемым транспортным средством.
[0192] Далее описывается процесс вычисления полосы оценки движения и извлечения события с использованием полосы оценки движения.
Аналогично варианту осуществления, описанному со ссылкой на фиг. 21, ниже описывается примерное окружение, в котором рассматриваемое транспортное средство поворачивает налево и въезжает на приоритетную дорогу T-образного перекрестка с неприоритетной дороги, и другое транспортное средство движется справа налево по приоритетной дороге T-образного перекрестка.
[0193] Фиг. 25 является блок-схемой последовательности операций способа, иллюстрирующей процедуру управления в этом процессе. Процесс этапов S101, S102 и S105 является идентичным процессу, описанному ранее со ссылкой на фиг. 20.
На следующем этапе S201, как проиллюстрировано на фиг. 26A, процессор 11 определения определяет область, в которой полоса BV1L оценки движения и второй маршрут перекрывают друг друга. Полоса BV1L оценки движения представляет собой область, имеющую конечную длину (ширину). В зависимости от диапазона, который должен оцениваться, длина полосы BV1L оценки движения составляет вплоть до сотен метров. Когда полоса оценки движения задается с использованием соединений, как проиллюстрировано на фиг. 26B, полоса оценки движения представляет собой область, которая задается посредством конечных длин (ширин) соединений.
[0194] После этапа S201 выполняется этап S107, на котором процессор 11 определения определяет направление приближения другого транспортного средства, движущегося по второму маршруту. Направление приближения другого транспортного средства может определяться из направления движения по второму маршруту.
[0195] На этапе S202, процессор 11 определения извлекает точку, которая является ближайшей к другому транспортному средству в направлении приближения другого транспортного средства на втором маршруте BV2S. В частности, как проиллюстрировано на фиг. 26C, событие в этом примере представляет собой точку C, которая расположена близко к рассматриваемому транспортному средству V1 и на самой ранней по потоку стороне в направлении движения по второму маршруту BV2S в пределах граничной линии "a" между "вторым маршрутом" и неперекрывающейся областью полосы оценки движения. Можно обнаруживать, что точка C позиционируется впереди стоп-линии для рассматриваемого транспортного средства и пешеходного перехода в полосе оценки движения и перед пешеходным переходом, который встречается после проезда через перекресток.
[0196] Процессор 11 определения выполняет процесс унификации событий. Этот процесс выполняется после процесса, проиллюстрированного на фиг. 20.
Ниже описывается процесс унификации событий со ссылкой на пример, проиллюстрированный на фиг. 27A. В примере по фиг. 27, когда рассматриваемое транспортное средство V1 поворачивает налево на перекрестке вдоль первого маршрута BV1L, события извлекаются с учетом другого транспортного средства V3, которое поворачивает направо из встречной полосы движения, и еще одного другого транспортного средства V2, которое движется по прямой по второму маршруту BV2S, пересекающемуся с первым маршрутом BV1L.
[0197] Как проиллюстрировано на фиг. 27B, узел ND1 задается сразу после того, как левый поворот на перекрестке и трех типах соединений сливаются в узел ND1: соединение LK1 для движения рассматриваемого транспортного средства V1; соединение LK3 для движения другого транспортного средства V3, поворачивающего направо со встречной полосы движения; и соединение LK2 для движения еще одного другого транспортного средства V2, движущегося справа налево. Таким образом, посредством фокусировки внимания на узле, в котором соединения унифицируются в один узел из двух или более узлов, можно извлекать соединения, имеющие точки пересечений с первым маршрутом, по которому движется рассматриваемое транспортное средство. Это обеспечивает простое извлечение вторых маршрутов.
[0198] Как проиллюстрировано на фиг. 27C, получаются сегменты пересекающихся линий между линией (полосой) оценки движения и вторыми маршрутами. В этом примере, имеются сегмент DE линии, который представляет собой сегмент пересекающихся линий между "линией (полосой) оценки движения" и "вторым маршрутом BV3R", и сегмент линии FG линии, который представляет собой сегмент пересекающихся линий между "линией (полосой) оценки движения" и "вторым маршрутом BV2S".
[0199] Выполняется определение для направлений приближения других транспортных средств, движущихся по "второму маршруту BV3R" и "второму маршруту BV2S", чтобы определять направления, в которых другие транспортные средства приближаются к рассматриваемому транспортному средству V1. В этом примере, при просмотре из рассматриваемого транспортного средства V1, другое транспортное средство V3 перемещается сверху вниз на чертеже, и еще одно другое транспортное средство V2 перемещается справа налево на чертеже.
[0200] Процессор 11 определения извлекает точку, в сегменте пересекающихся линий, которая расположена на самой ранней по потоку стороне вдоль направления, в котором приближается другое транспортное средство, в качестве события. В этом примере, извлекаются точки D и F.
[0201] Как проиллюстрировано на фиг. 27D, когда два или более событий существуют в определенной области, процессор 11 определения унифицирует их. Например, когда два или более событий существуют в идентичной полосе движения, они унифицируются в одно событие. Это обеспечивает возможность совместного использования позиции остановки.
[0202] Как проиллюстрировано на фиг. 28, когда рассматриваемое транспортное средство поворачивает направо на T-образном перекрестке, существуют две точки A и B помех. Первая точка помех представляет собой точку пересечения между "первым маршрутом BV1R" и "вторым маршрутом BV2S", и вторая точка помех представляет собой точку пересечения между "первым маршрутом BV1R" и "вторым маршрутом BV4S". Относительно остановки в первой и второй точках помех, они не находится в идентичной полосе движения, но водитель может предпринимать действие, чтобы выполнять остановку до въезда в полосу движения на более близкой стороне. Таким образом, когда два или более событий существуют в определенной области, либо когда позиция остановки для двух или более точек помех является идентичной, унификация в одну точку помех обеспечивает возможность простого определения позиции остановки.
[0203] Фиг. 29 иллюстрирует окружение встреч на перекрестке. События, которые влияют на движение рассматриваемого транспортного средства V1, представляют собой встречи со следующими пятью объектами: (1) наличие другого транспортного средства V2A на слиянии во второй маршрут; (2) наличие еще одного другого транспортного средства V2B на втором маршруте; (3) наличие еще одного другого транспортного средства V2C на втором маршруте; (4) наличие другого транспортного средства V2D, движущийся в смежной полосе движения; и (5) пешеход, переходящий по пешеходному переходу.
Широко используемый процесс может включать в себя получение присутствия или отсутствия вышеуказанных пяти объектов, вычисление позиционной взаимосвязи из объектов и последующее определение продвижения вперед/остановки. Даже с учетом определения присутствия или отсутствия объектов, процесс определения должен выполняться 25 раз.
Напротив, согласно одному или более вариантов осуществления настоящего изобретения, события сужаются до событий, которые возникают только в точках пересечений между первым маршрутом и вторыми маршрутами, чтобы определять продвижение вперед/остановку. В примере, проиллюстрированном на фиг. 29, достаточно того, что аппаратура 100 содействия при движении выполняет только четыре процесса определения: (1) определение продвижения вперед/остановки на стоп-линии; (2) определение продвижения вперед/остановки на пешеходном переходе; (3) определение продвижения вперед/остановки в точке пересечения со вторым маршрутом; и (4) определение продвижения вперед/остановки на следующем пешеходном переходе.
Таким образом, простое определение обеспечивается посредством использования информации, в которой события сужаются и компонуются в виде временного ряда, и может уменьшаться нагрузка по обработке.
В завершение, пример отображения результата определения по фиг. 29 проиллюстрирован на фиг. 30. Как проиллюстрировано на фиг. 30, определение в каждом событии может выражаться простым способом. События, которые должны встречаться, ассоциированы с временной осью, вдоль которой рассматриваемое транспортное средство продвигается вперед, и пользователь может легко воспринимать события. Пользователь может совместно использовать содержимое определения для рассматриваемого транспортного средства, т.е. содержимое плана операций вождения, с устройством или аппаратурой. В частности, когда процесс содействия при движении выполняет часть или все управление вождением, пользователь может быстро информироваться в отношении действия вождения на стороне транспортного средства, чтобы за счет этого быть уверенным в надежности управления при автоматизированном вождении (или при частично автоматизированном вождении).
[0204] Аппаратура 100 содействия при движении согласно одному или более вариантов осуществления настоящего изобретения сконфигурирована и работает так, как указано выше, и могут обеспечиваться следующие преимущества.
[0205] (1-1) Устройство 10 определения окружения согласно одному или более вариантов осуществления настоящего изобретения извлекает множество событий, с которыми встречается рассматриваемое транспортное средство, движущееся по первому маршруту, на основе взаимосвязей между первым маршрутом, по которому движется рассматриваемое транспортное средство, и вторыми маршрутами, имеющими точки пересечений с первым маршрутом, и определяет окружение с использованием взаимосвязи между каждым из извлеченных событий и рассматриваемым транспортным средством. Когда используется устройство 10 определения окружения согласно одному или более вариантов осуществления настоящего изобретения, только события, определенные как важные с точки зрения определения действия рассматриваемого транспортного средства, могут учитываться, чтобы определять окружение, с которым встречается рассматриваемое транспортное средство. События могут сужаться до событий, которые должны определяться, и в силу этого может уменьшаться нагрузка по обработке. При содействия при движении, включающей в себя автоматизированное вождение, задержка в обработке не является предпочтительной. Уменьшение нагрузки по обработке может уменьшать время, требуемое для обработки, и в силу этого предотвращать возникновение задержки в обработке.
[0206] (1-2) Устройство 10 определения окружения согласно одному или более вариантов осуществления настоящего изобретения использует взаимосвязь, извлекаемую из правила дорожного движения на первом маршруте и правила дорожного движения на каждом из вторых маршрутов, чтобы извлекать событие, с которым встречается рассматриваемое транспортное средство, движущееся по первому маршруту. Когда используется устройство 10 определения окружения согласно одному или более вариантов осуществления настоящего изобретения, могут извлекаться события, для которых требуется рассмотрение с точки зрения правил дорожного движения.
[0207] (1-3) Устройство 10 определения окружения согласно одному или более вариантов осуществления настоящего изобретения использует информацию по обнаружению объекта, существующего рядом с рассматриваемым транспортным средством, чтобы извлекать событие, с которым встречается рассматриваемое транспортное средство, движущееся по первому маршруту. Когда используется устройство 10 определения окружения согласно одному или более вариантов осуществления настоящего изобретения, объекты, которые влияют на вождение рассматриваемого транспортного средства, могут извлекаться в качестве событий.
[0208] (1-4) Устройство 10 определения окружения согласно одному или более вариантов осуществления настоящего изобретения использует позиционную информацию наличия объекта, чтобы извлекать событие, с которым встречается рассматриваемое транспортное средство, движущееся по первому маршруту. Когда используется устройство 10 определения окружения согласно одному или более вариантов осуществления настоящего изобретения, позиции объектов могут учитываться, чтобы извлекать события.
[0209] (1-5) Устройство 10 определения окружения согласно одному или более вариантов осуществления настоящего изобретения использует правило дорожного движения на первом маршруте и правило дорожного движения на каждом из вторых маршрутов, чтобы получать уровень приоритета относительно проезда по первому маршруту и второму маршруту, и использует уровень приоритета, чтобы извлекать событие, с которым встречается рассматриваемое транспортное средство, движущееся по первому маршруту. Когда используется устройство 10 определения окружения согласно одному или более вариантов осуществления настоящего изобретения, могут извлекаться события, для которых требуется рассмотрение с точек зрения приоритетного маршрута, правила переключения сигналов светофора и т.д.
[0210] (1-6) Устройство 10 определения окружения согласно одному или более вариантов осуществления настоящего изобретения использует информацию светофоров первого маршрута и информацию светофоров каждого из вторых маршрутов, чтобы получать уровень приоритета относительно проезда по первому маршруту и второму маршруту, и использует уровень приоритета, чтобы извлекать событие, с которым встречается рассматриваемое транспортное средство, движущееся по первому маршруту. Когда используется устройство 10 определения окружения согласно одному или более вариантов осуществления настоящего изобретения, могут извлекаться события, для которых требуется рассмотрение с точки зрения индикатора фактического сигнала светофора.
[0211] (1-7) Устройство 10 определения окружения согласно одному или более вариантов осуществления настоящего изобретения использует дорожную информацию первого маршрута и дорожную информацию каждого из вторых маршрутов, чтобы получать уровень приоритета относительно проезда по первому маршруту и второму маршруту, и использует уровень приоритета, чтобы извлекать событие, с которым встречается рассматриваемое транспортное средство, движущееся по первому маршруту. Когда используется устройство 10 определения окружения согласно одному или более вариантов осуществления настоящего изобретения, могут извлекаться события, для которых требуется рассмотрение с точек зрения ширины дороги, интенсивности движения на дороге, формы дороги и т.д.
[0212] (1-8) Аппаратура 100 содействия при движении согласно одному или более вариантов осуществления настоящего изобретения использует взаимосвязи между событиями, определенными посредством процессора определения, и рассматриваемым транспортным средством, чтобы составлять/определять план операций вождения при движении по первому маршруту. Когда используется аппаратура 100 содействия при движении согласно одному или более вариантов осуществления настоящего изобретения, план операций вождения может составляться/определяться на основе определения для необходимых событий. События в силу этого сужаются до событий, которые должны предполагаться, и время обработки может уменьшаться при составлении соответствующего плана операций вождения. Это обеспечивает возможность предоставления содействия при движении с уменьшенным временем задержки.
[0213] (1-9) Аппаратура 100 содействия при движении согласно одному или более вариантов осуществления настоящего изобретения использует позиционную информацию наличия объекта, чтобы планировать/определять действие вождения для события, с которым встречается рассматриваемое транспортное средство, движущееся по первому маршруту. Когда используется аппаратура 100 содействия при движении согласно одному или более вариантов осуществления настоящего изобретения, план операций вождения может составляться/определяться только с рассмотрением объектов, которые влияют на вождение рассматриваемого транспортного средства.
[0214] (1-10) Аппаратура 100 содействия при движении согласно одному или более вариантов осуществления настоящего изобретения использует правило дорожного движения на первом маршруте и правило дорожного движения на каждом из вторых маршрутов, чтобы получать уровень приоритета относительно проезда по первому маршруту и второму маршруту, и использует уровень приоритета, чтобы планировать/определять действие вождения для события, с которым встречается рассматриваемое транспортное средство, движущееся по первому маршруту. Когда используется аппаратура 100 содействия при движении согласно одному или более вариантов осуществления настоящего изобретения, план операций вождения может составляться/определяться с учетом приоритетного маршрута, светофора и т.п.
[0215] (1-11) Аппаратура 100 содействия при движении согласно одному или более вариантов осуществления настоящего изобретения использует информацию светофоров первого маршрута и информацию светофоров каждого из вторых маршрутов, чтобы получать уровень приоритета относительно проезда по первому маршруту и второму маршруту, и использует уровень приоритета, чтобы планировать/определять действие вождения для события, с которым встречается рассматриваемое транспортное средство, движущееся по первому маршруту. Когда используется аппаратура 100 содействия при движении согласно одному или более вариантов осуществления настоящего изобретения, план операций вождения может составляться/определяться с учетом индикатора фактического сигнала светофора.
[0216] (1-12) Аппаратура 100 содействия при движении согласно одному или более вариантов осуществления настоящего изобретения использует дорожную информацию первого маршрута и дорожную информацию каждого из вторых маршрутов, чтобы получать уровень приоритета относительно проезда по первому маршруту и второму маршруту, и использует уровень приоритета, чтобы планировать/определять действие вождения для события, с которым встречается рассматриваемое транспортное средство, движущееся по первому маршруту. Когда используется аппаратура 100 содействия при движении согласно одному или более вариантов осуществления настоящего изобретения, план операций вождения может составляться/определяться с учетом ширины дороги, интенсивности движения на дороге, формы дороги и т.д.
[0217] (1-13) Способ определения окружения согласно одному или более вариантов осуществления настоящего изобретения включает в себя извлечение вторых маршрутов, имеющих точки пересечений с первым маршрутом, по которому движется рассматриваемое транспортное средство, и извлечение множества событий, с которыми встречается рассматриваемое транспортное средство, движущееся по первому маршруту, на основе взаимосвязей между первым маршрутом и вторыми маршрутами. Когда используется способ определения окружения согласно одному или более вариантов осуществления настоящего изобретения, могут получаться работа и преимущество, описанные в (1-1).
[0218] (2-1) Устройство 10 определения окружения согласно одному или более вариантов осуществления настоящего изобретения извлекает множество событий, с которыми встречается рассматриваемое транспортное средство при движении по первому маршруту, и перекомпонует извлеченное множество событий в порядке встреч с рассматриваемым транспортным средством. Когда используется устройство 10 определения окружения согласно одному или более вариантов осуществления настоящего изобретения, суженные события могут быть перекомпонованы в порядке встреч с рассматриваемым транспортным средством, чтобы за счет этого определять события с учетом порядка встреч без вызывания дополнительной нагрузки по обработке.
[0219] (2-2) Устройство 10 определения окружения согласно одному или более вариантов осуществления настоящего изобретения извлекает события, включающие в себя стационарные объекты и движущиеся объекты, и перекомпонует стационарные объекты и движущиеся объекты, включенные в извлеченное множество событий, в порядке встреч с рассматриваемым транспортным средством. Когда используется устройство 10 определения окружения согласно одному или более вариантов осуществления настоящего изобретения, порядок встреч с объектами, включающими в себя стационарные объекты и движущиеся объекты, может определяться на идентичной временной оси без вызывания дополнительной нагрузки по обработке.
[0220] (2-3) Устройство 10 определения окружения согласно одному или более вариантов осуществления настоящего изобретения извлекает множество событий, с которыми встречается рассматриваемое транспортное средство, движущееся по первому маршруту, на основе взаимосвязей между первым маршрутом, по которому движется рассматриваемое транспортное средство, и вторыми маршрутами, имеющими точки пересечений с первым маршрутом, и определяет окружение с использованием взаимосвязи между каждым из извлеченных событий и рассматриваемым транспортным средством. Когда используется устройство 10 определения окружения согласно одному или более вариантов осуществления настоящего изобретения, окружение, с которым встречается рассматриваемое транспортное средство, может определяться только с учетом событий, которые определяются как важные для определения действия посредством рассматриваемого транспортного средства. События могут сужаться до событий, которые должны определяться, и в силу этого может уменьшаться нагрузка по обработке.
[0221] (2-4) Аппаратура 100 содействия при движении согласно одному или более вариантов осуществления настоящего изобретения отображает информационные элементы, которые представляют извлеченные события в порядке встреч с рассматриваемым транспортным средством. Когда используется аппаратура 100 содействия при движении согласно одному или более вариантов осуществления настоящего изобретения, водитель рассматриваемого транспортного средства V1 может визуально распознавать то, с какими типами событий должно встречаться рассматриваемое транспортное средство V1, и порядок встреч.
[0222] (2-5) Аппаратура 100 содействия при движении согласно одному или более вариантов осуществления настоящего изобретения отображает информационные элементы, представляющие извлеченные события в позициях в соответствии с отношениями фактических расстояний от рассматриваемого транспортного средства до событий. Когда используется аппаратура 100 содействия при движении согласно одному или более вариантов осуществления настоящего изобретения, водитель рассматриваемого транспортного средства V1 может визуально распознавать, когда с какими типами событий должно встречаться рассматриваемое транспортное средство V1, и порядок встреч.
[0223] (2-6) Аппаратура 100 содействия при движении согласно одному или более вариантов осуществления настоящего изобретения использует взаимосвязи между событиями, определенными посредством процессора определения, и рассматриваемым транспортным средством, чтобы составлять/определять план операций вождения для движения рассматриваемого транспортного средства по первому маршруту. Когда используется аппаратура 100 содействия при движении согласно одному или более вариантов осуществления настоящего изобретения, план операций вождения может составляться/определяться на основе определения необходимых событий. События сужаются до событий, которые должны предполагаться, и в силу этого время обработки может уменьшаться при составлении соответствующего плана операций вождения. Это обеспечивает возможность предоставления содействия при движении с уменьшенным временем задержки.
[0224] (2-7) Аппаратура 100 содействия при движении согласно одному или более вариантов осуществления настоящего изобретения извлекает одно событие, с которым рассматриваемое транспортное средство встречается сначала, и при котором рассматриваемое транспортное средство должно останавливаться, из множества событий, с которыми встречается рассматриваемое транспортное средство при движении по первому маршруту, и составляет/определяет план операций вождения таким образом, что точка, в которой извлеченное одно событие имеет место, представляет собой точку остановки для рассматриваемого транспортного средства. Когда используется аппаратура 100 содействия при движении согласно одному или более вариантов осуществления настоящего изобретения, влияние на транспортный поток может уменьшаться, поскольку рассматриваемое транспортное средство V1 управляется с возможностью выполнять остановку в событии, которое является ближайшим к текущей позиции рассматриваемого транспортного средства V1.
[0225] (2-8) Способ определения окружения согласно одному или более вариантов осуществления настоящего изобретения использует процессор определения, выполненный с возможностью определять окружение, с которым встречается рассматриваемое транспортное средство, движущееся по маршруту. Способ определения окружения включает в себя извлечение множества событий, с которыми встречается рассматриваемое транспортное средство при движении по первому маршруту, и перекомпоновку и вывод извлеченного множества событий в порядке встреч с рассматриваемым транспортным средством. Когда используется способ определения окружения согласно одному или более вариантов осуществления настоящего изобретения, могут получаться работа и преимущество, описанные в (2-1).
[0226] (3-1) Устройство 10 определения окружения согласно одному или более вариантов осуществления настоящего изобретения вычисляет линию оценки движения с применением временного ряда рассматриваемого транспортного средства, движущегося по первому маршруту, и определяет окружение с использованием взаимосвязи между рассматриваемым транспортным средством и событием, которое извлекается на основе позиций точек пересечений между линией оценки движения и вторым маршрутом, имеющим точку пересечения с первым маршрутом. Затруднительно отделять два или более событий, которые одновременно получаются из текущей позиции рассматриваемого транспортного средства, к примеру, в изображении, захваченном посредством камеры. Также затруднительно корректно определять порядок встреч с двумя или более событий, включенных в захваченное изображение. Если порядок встреч не может корректно определяться, надежность ухудшается в плане операций вождения, который должен составляться/определяться в виде временного ряда. Использование устройства 10 определения окружения согласно одному или более вариантов осуществления настоящего изобретения обеспечивает возможность уменьшения вычислительной нагрузки с учетом порядка встреч с событиями, чтобы составлять/определять высокоточный план операций вождения.
[0227] (3-2) Устройство 10 определения окружения согласно одному или более вариантов осуществления настоящего изобретения извлекает событие на основе позиции точки пересечения, расположенной на самой ранней по потоку стороне вдоль направления движения по второму маршруту, из точек пересечений между линией оценки движения и вторым маршрутом. Когда используется устройство 10 определения окружения согласно одному или более вариантов осуществления настоящего изобретения, можно надлежащим образом извлекать событие (точку), на которое следует сначала обращать внимание в окружении.
[0228] (3-3) Когда рассматриваемое транспортное средство движется в области первого маршрута, в которой полоса движения не задается, устройство 10 определения окружения согласно одному или более вариантов осуществления настоящего изобретения обращается к картографической информации, чтобы вычислять линию оценки движения. Когда используется устройство 10 определения окружения согласно одному или более вариантов осуществления настоящего изобретения, соответствующее событие (точка) может извлекаться даже в таком местоположении, как перекресток и точка слияния, в которой не задается полоса движения.
[0229] (3-4) Устройство 10 определения окружения согласно одному или более вариантов осуществления настоящего изобретения вычисляет полосу оценки движения с применением временного ряда рассматриваемого транспортного средства, движущегося по первому маршруту, и извлекает событие, с которым встречается рассматриваемое транспортное средство, на основе позиции точки пересечения между полосой оценки движения и вторым маршрутом, имеющим точку пересечения с первым маршрутом. Точка пересечения между полосой оценки движения и вторым маршрутом получается в самое первое время и расположена на самой ранней по потоку стороне вдоль направления движения по второму маршруту из точек пересечений между полосой оценки движения и вторым маршрутом. Устройство 10 определения окружения определяет окружение с использованием взаимосвязи между извлеченным событием и рассматриваемым транспортным средством. Использование устройства 10 определения окружения согласно одному или более вариантов осуществления настоящего изобретения позволяет упрощать процесс для составления окончательного плана операций вождения. Вычислительная нагрузка может уменьшаться с учетом необходимых событий, чтобы составлять/определять высокоточный план операций вождения.
[0230] (3-5) Когда рассматриваемое транспортное средство движется в области первого маршрута, в которой полоса движения не задается, устройство 10 определения окружения согласно одному или более вариантов осуществления настоящего изобретения обращается к картографической информации, чтобы вычислять полосу оценки движения. Когда используется устройство 10 определения окружения согласно одному или более вариантов осуществления настоящего изобретения, соответствующее событие (точка) может извлекаться даже в таком местоположении, как перекресток и точка слияния, в которой не задается полоса движения.
[0231] (3-6) Устройство 10 определения окружения согласно одному или более вариантов осуществления настоящего изобретения обращается к картографической информации, в которой задаются узлы и соединения, чтобы извлекать первый узел, ассоциированный с первым маршрутом, по которому движется рассматриваемое транспортное средство. Первый узел задается со взаимосвязью соединений с другими узлами. Устройство 10 определения окружения выбирает маршрут, которому принадлежат другие узлы, в качестве второго маршрута. Другие узлы задаются со взаимосвязью соединений с первым узлом. Когда используется устройство 10 определения окружения согласно одному или более вариантов осуществления настоящего изобретения, информация относительно узлов и соединений может быть использована для того, чтобы получать второй маршрут с уменьшенной вычислительной нагрузкой.
[0232] (3-7) Когда два или более извлеченных событий, с которыми сталкивается рассматриваемое транспортное средство, находятся близко друг к другу в пределах предварительно определенного расстояния, устройство 10 определения окружения согласно одному или более вариантов осуществления настоящего изобретения унифицирует два или более событий в одно событие. Когда используется устройство 10 определения окружения согласно одному или более вариантов осуществления настоящего изобретения, рассматриваемое транспортное средство может двигаться плавно в области R1 окружения без повторения вождения в режиме частых остановок и троганий с места.
[0233] (3-8) Аппаратура 100 содействия при движении согласно одному или более вариантов осуществления настоящего изобретения определяет либо действие продвижения вперед, либо действие остановки для каждого из событий, извлеченных посредством процессора определения. Когда используется аппаратура 100 содействия при движении согласно одному или более вариантов осуществления настоящего изобретения, "останавливаться" или "трогаться с места" может определяться для каждого события, для которого необходимость определения является высокой, и корректный и простой план операций вождения в силу этого может составляться/определяться.
[0234] (3-9) Способ определения окружения согласно одному или более вариантов осуществления настоящего изобретения включает в себя вычисление линии оценки движения с применением временного ряда рассматриваемого транспортного средства, движущегося по первому маршруту, извлечение события, с которым встречается рассматриваемое транспортное средство, на основе позиций точек пересечений между линией оценки движения и вторым маршрутом, имеющим точку пересечения с первым маршрутом, и определение окружения с использованием взаимосвязи между извлеченным событием и рассматриваемым транспортным средством. Когда используется способ определения окружения согласно одному или более вариантов осуществления настоящего изобретения, могут получаться работа и преимущество, описанные в (3-1).
[0235] (4-1) Устройство 20 планирования вождения согласно одному или более вариантов осуществления настоящего изобретения определяет действие (одно действие) для каждого из множества событий, с которыми встречается рассматриваемое транспортное средство, и составляет/определяет последовательность плана операций вождения для окружения, с которым встречается рассматриваемое транспортное средство, с использованием содержимого каждого действия, определенного для каждого из множества событий. Когда используется устройство 20 планирования вождения согласно одному или более вариантов осуществления настоящего изобретения, процесс для составления окончательного плана операций вождения может упрощаться. Вычислительная нагрузка может уменьшаться с учетом необходимых событий, чтобы составлять/определять высокоточный план операций вождения. Кроме того, может составляться/определяться план операций вождения, в котором становится очевидным, где рассматриваемое транспортное средство должно выполнять остановку от начала проезда через окружение до завершения проезда через окружение.
[0236] (4-2) Устройство 20 планирования вождения согласно одному или более вариантов осуществления настоящего изобретения определяет либо действие продвижения вперед, либо действие остановки для каждого из множества событий, с которыми встречается рассматриваемое транспортное средство. Когда используется устройство 20 планирования вождения согласно одному или более вариантов осуществления настоящего изобретения, "останавливаться" или "трогаться с места" может определяться для каждого события, для которого необходимость определения является высокой, и корректный и простой план операций вождения в силу этого может составляться/определяться.
[0237] (4-3) Когда выполняется определение действия остановки или определение неопределимости (невозможности определять) для множества событий, с которыми встречается рассматриваемое транспортное средство, устройство 20 планирования вождения согласно одному или более вариантов осуществления настоящего изобретения управляет рассматриваемым транспортным средством с возможностью выполнять остановку в событии, которое является ближайшим к рассматриваемому транспортному средству. Когда точка, в которой должно выполнять остановку рассматриваемое транспортное средство V1, существует в области R1, соответствующей окружению, использование устройства 20 планирования вождения согласно одному или более вариантов осуществления настоящего изобретения обеспечивает возможность рассматриваемому транспортному средству V1 выполнять остановку немедленно и может исключать риск.
[0238] (4-4) Когда определение действия продвижения вперед выполняется для события из множества событий, с которыми встречается рассматриваемое транспортное средство, и определение действия остановки или неопределимости выполняется для следующего события, которое должно встречаться следующим после события, устройство 20 планирования вождения согласно одному или более вариантов осуществления настоящего изобретения управляет рассматриваемым транспортным средством с возможностью выполнять остановку в точке встречи с событием, для которого определяется действие продвижения вперед. Даже в случае, если однократно определено действие продвижения вперед, когда событие, с которым после этого встречается рассматриваемое транспортное средство V1, требует действия остановки или является неопределимым, использование устройства 20 планирования вождения согласно одному или более вариантов осуществления настоящего изобретения обеспечивает возможность рассматриваемому транспортному средству V1 выполнять остановку в позиции, для которой однократно определено действие продвижения вперед. Местоположение, для которого определяется действие продвижения вперед, представляет собой местоположение, в котором рассматриваемому транспортному средству V1 разрешается существовать, и рассматриваемое транспортное средство V1 в силу этого может выполнять безопасную остановку.
[0239] (4-5) Когда определение действия остановки или неопределимости выполняется для события из множества событий, с которыми встречается рассматриваемое транспортное средство, и событие принадлежит второму маршруту, устройство 20 планирования вождения согласно одному или более вариантов осуществления настоящего изобретения управляет рассматриваемым транспортным средством с возможностью выполнять остановку в позиции, которая расположена на стороне дополнительно раньше по потоку, чем событие, и в которой остановка является возможной. Даже в случае, если определение действия остановки или неопределимости выполняется для события, когда позиция остановки для события принадлежит второму маршруту, рассматриваемое транспортное средство V1 может перегораживать другие транспортные средства, движущиеся по второму маршруту. Позиция остановки в силу этого является несоответствующей. Когда используется устройство 20 планирования вождения согласно одному или более вариантов осуществления настоящего изобретения, позиция остановки может задаваться в качестве расположенной раньше по потоку позиции, в которой остановка является возможной, а не в пределах второго маршрута.
[0240] (4-6) Когда определение действия остановки или неопределимости выполняется для события из множества событий, с которыми встречается рассматриваемое транспортное средство, и событие расположено в пределах предварительно определенного расстояния от другого события, устройство 20 планирования вождения согласно одному или более вариантов осуществления настоящего изобретения управляет рассматриваемым транспортным средством с возможностью выполнять остановку в позиции, которая расположена на стороне дополнительно раньше по потоку, чем событие, и в которой остановка является возможной. Даже в случае, если определение действия остановки или неопределимости выполняется для события, когда позиция остановки для события находится близко или перекрывает позицию остановки для другого события, возможно, должно учитываться сопоставление с определением для другого события. Позиция остановки в силу этого является несоответствующей. Использование устройства 20 планирования вождения согласно одному или более вариантов осуществления настоящего изобретения обеспечивает возможность задания позиции остановки в качестве расположенной раньше по потоку позиции, в которой остановка является возможной, а не в пределах второго маршрута. Это позволяет уменьшать случаи неопределимости. Кроме того, нагрузка процессов определения может уменьшаться, и рассматриваемое транспортное средство V1 может двигаться плавно в области R1 окружения без повторения вождения в режиме частых остановок и троганий с места.
[0241] (4-7) Когда определение действия продвижения вперед выполняется для одного события из множества событий, с которыми встречается рассматриваемое транспортное средство, и определение действия остановки или неопределимости выполняется для другого события, которое должно встречаться следующим после события, устройство 20 планирования вождения согласно одному или более вариантов осуществления настоящего изобретения составляет план операций вождения таким образом, что рассматриваемое транспортное средство продвигается вперед через одно событие, если степень разделения между одним событием и другим событием составляет предварительно определенное значение или больше. Когда отдельные события определяются различными способами: "продвижение вперед" на стороне раньше по потоку и "остановка" на расположенной далее по потоку стороне, рассматриваемому транспортному средству V1 может разрешаться продвигаться вперед через вышерасположенное событие, чтобы за счет этого не допускать усложнения процесса.
[0242] (4-8) Когда определение действия продвижения вперед выполняется для одного события из множества событий, с которыми встречается рассматриваемое транспортное средство, и определение действия остановки или неопределимости выполняется для другого события, которое должно встречаться следующим после события, устройство 20 планирования вождения согласно одному или более вариантов осуществления настоящего изобретения составляет/определяет план операций вождения таким образом, чтобы уменьшать скорость действия продвижения вперед в одном событии. Когда существует паркующееся транспортное средство и т.п., и столкновение с паркующимся транспортным средством может предотвращаться, но объекты не могут в достаточной степени обнаруживаться вследствие слепой зоны, вызываемой посредством паркующегося транспортного средства, продвижение вперед разрешается в то время, когда уменьшается скорость во время предотвращения столкновения с паркующимся транспортным средством. Это позволяет предотвращать помехи для транспортного потока с учетом безопасности.
[0243] (4-9) Аппаратура 100 содействия при движении согласно одному или более вариантов осуществления настоящего изобретения извлекает множество событий, с которыми встречается рассматриваемое транспортное средство, движущееся по первому маршруту, на основе взаимосвязей между первым маршрутом, по которому движется рассматриваемое транспортное средство, и вторыми маршрутами, имеющими точки пересечений с первым маршрутом, перекомпонует извлеченное множество событий в порядке встреч с рассматриваемым транспортным средством и составляет/определяет последовательность плана операций вождения для окружения, с которым встречается рассматриваемое транспортное средство, с использованием определенных взаимосвязей между рассматриваемым транспортным средством и множеством событий, с которыми встречается рассматриваемое транспортное средство, в виде временного ряда. Использование аппаратуры 100 содействия при движении согласно одному или более вариантов осуществления настоящего изобретения обеспечивает возможность составления/определения плана операций вождения на основе определения для необходимых событий. Суженные события, которые должны предполагаться, могут уменьшать время обработки при составлении соответствующего плана операций вождения. Содействие при движении в силу этого может выполняться с уменьшенным временем задержки.
[0244] (4-10) Способ планирования вождения согласно одному или более вариантов осуществления настоящего изобретения включает в себя составление плана операций вождения для окружения, с которым встречается рассматриваемое транспортное средство, с использованием результатов определения для взаимосвязей между рассматриваемым транспортным средством и множеством событий, с которыми встречается рассматриваемое транспортное средство, в виде временного ряда при движении по первому маршруту. Когда используется способ планирования вождения согласно одному или более вариантов осуществления настоящего изобретения, могут получаться работа и преимущество, описанные в (4-1).
[0245] (5-1) Устройство 20 планирования вождения согласно одному или более вариантов осуществления настоящего изобретения задает один или более возможных вариантов позиций остановки для выполнения остановки посредством рассматриваемого транспортного средства, с использованием результатов определения для взаимосвязей между рассматриваемым транспортным средством и множеством событий, с которыми встречается рассматриваемое транспортное средство, в виде временного ряда при движении по первому маршруту. Один или более возможных вариантов позиций остановки задаются для соответствующих событий. Устройство 20 планирования вождения составляет/определяет план операций вождения для окружения, с которым встречается рассматриваемое транспортное средство, с использованием результатов определения для взаимосвязей между рассматриваемым транспортным средством и множеством событий, с которыми встречается рассматриваемое транспортное средство в возможных вариантах позиций остановки. При трафике, в котором первый маршрут и вторые маршруты имеют точки пересечений, использование устройства 20 планирования вождения согласно одному или более вариантов осуществления настоящего изобретения обеспечивает возможность составления/определения плана операций вождения с учетом взаимосвязей между рассматриваемым транспортным средством V1 и множеством событий, с которыми встречается рассматриваемое транспортное средство V1, в возможных вариантах позиций остановки. Вождение в силу этого может быть реализовано без оказания влияния на другие транспортные средства, пешеходов и т.д.
[0246] (5-2) Устройство 20 планирования вождения согласно одному или более вариантов осуществления настоящего изобретения определяет возможный вариант позиции остановки из возможных вариантов позиций остановки, который является ближайшим к рассматриваемому транспортному средству в окружении, с которым встречается рассматриваемое транспортное средство, в качестве позиции остановки для выполнения остановки посредством рассматриваемого транспортного средства. Согласно устройству 20 планирования вождения в одном или более вариантов осуществления настоящего изобретения, рассматриваемое транспортное средство V1 управляется с возможностью выполнять остановку в позиции, из возможных вариантов позиций остановки, которая является ближайшей к текущей позиции рассматриваемого транспортного средства V1, и может уменьшаться влияние на транспортный поток.
[0247] (5-3) Устройство 20 планирования вождения согласно одному или более вариантов осуществления настоящего изобретения задает возможные варианты позиций остановки в позициях, расположенных на стороне дополнительно раньше по потоку на предварительно определенных расстояниях, чем позиции остановки, требуемые для выполнения остановки посредством рассматриваемого транспортного средства. Когда используется устройство 20 планирования вождения согласно одному или более вариантов осуществления настоящего изобретения, влияние на транспортный поток может уменьшаться, поскольку рассматриваемое транспортное средство V1 управляется с возможностью выполнять остановку в позиции, которая находится ближе к текущей позиции рассматриваемого транспортного средства, чем позиция остановки, заданная в информации 224 правил дорожного движения.
[0248] (5-4) Устройство 20 планирования вождения согласно одному или более вариантов осуществления настоящего изобретения задает возможные варианты позиций остановки в позициях, расположенных на стороне дополнительно раньше по потоку на предварительно определенных расстояниях, чем внешний край области, в которой парковка и остановка рассматриваемого транспортного средства запрещается. Влияние на транспортный поток может уменьшаться, поскольку рассматриваемое транспортное средство V1 управляется с возможностью выполнять остановку в позиции, которая находится ближе к текущей позиции рассматриваемого транспортного средства, чем позиция остановки, заданная в фактической информации 224 правил дорожного движения.
[0249] (5-5) Устройство 20 планирования вождения согласно одному или более вариантов осуществления настоящего изобретения задает возможные варианты позиций остановки за пределами/рядом с областью возможности движения другого маршрута в качестве второго маршрута, который пересекается с первым маршрутом. Влияние на транспортный поток может уменьшаться, поскольку рассматриваемое транспортное средство V1 управляется с возможностью выполнять остановку в позиции, которая находится ближе к текущей позиции рассматриваемого транспортного средства V1, чем позиция, расположенная в полосе движения второго маршрута, либо чем внешний край области возможности движения.
[0250] (5-6) Когда рассматриваемое транспортное средство проезжает через одно событие, и кузов транспортного средства для рассматриваемого транспортного средства выступает из первого маршрута, устройство 20 планирования вождения согласно одному или более вариантов осуществления настоящего изобретения составляет/определяет план операций вождения таким образом, что рассматриваемое транспортное средство выполняет остановку в возможном варианте позиции остановки, который расположен на стороне раньше по потоку, смежной с одним событием. Когда рассматриваемое транспортное средство V1 выступает из первого маршрута, т.е. когда кузов транспортного средства для рассматриваемого транспортного средства V1 может въезжать в полосу движения другого маршрута или его области возможности движения, влияние на транспортный поток может уменьшаться, поскольку рассматриваемое транспортное средство V1 управляется с возможностью выполнять остановку в позиции события, которая ближе к текущей позиции рассматриваемого транспортного средства V1.
[0251] (5-7) Устройство 20 планирования вождения согласно одному или более вариантов осуществления настоящего изобретения не задает возможные варианты позиций остановки в области, в которой события, с которыми встречается рассматриваемое транспортное средство, не возникают вследствие светофора на первом маршруте или правила дорожного движения на первом маршруте. Согласно устройству 20 планирования вождения, в одном или более вариантов осуществления настоящего изобретения, остановка может избегаться в окружении, в котором остановка не требуется, и может выполняться плавное движение.
[0252] (5-8) Когда другое транспортное средство сливается с первым маршрутом в позиции для возможного варианта позиции остановки из второго маршрута, имеющего точку пересечения с первым маршрутом, и скорость другого транспортного средства составляет указанную скорость или меньше, устройство 20 планирования вождения согласно одному или более вариантов осуществления настоящего изобретения определяет остановку в другом возможном варианте позиции остановки, который расположен на стороне раньше по потоку, смежной с возможным вариантом позиции остановки. Когда скорость другого транспортного средства, сливающегося с первым маршрутом в позиции для возможного варианта позиции остановки, составляет указанную скорость или меньше, рассматриваемое транспортное средство может выполнять остановку в возможном варианте позиции остановки около текущей позиции рассматриваемого транспортного средства, чтобы за счет этого предпринимать действие вождения, которое не влияет на потоки других транспортных средств и пешеходов.
[0253] (5-9) Аппаратура 100 содействия при движении согласно одному или более вариантов осуществления настоящего изобретения извлекает множество событий, с которыми встречается рассматриваемое транспортное средство, движущееся по первому маршруту, на основе взаимосвязей между первым маршрутом, по которому движется рассматриваемое транспортное средство, и вторыми маршрутами, имеющими точки пересечений с первым маршрутом, и задает один или более возможных вариантов позиций остановки для выполнения остановки посредством рассматриваемого транспортного средства, на основе определенных взаимосвязей между рассматриваемым транспортным средством и событиями. Один или более возможных вариантов позиций остановки задаются для соответствующих событий. Аппаратура 100 содействия при движении определяет позицию остановки для выполнения остановки посредством рассматриваемого транспортного средства, в соответствии с результатами определения для взаимосвязей между рассматриваемым транспортным средством и множеством событий, с которыми встречается рассматриваемое транспортное средство в возможных вариантах позиций остановки, и управляет рассматриваемым транспортным средством с возможностью выполнять остановку в позиции остановки. Использование аппаратуры 100 содействия при движении согласно одному или более вариантов осуществления настоящего изобретения обеспечивает возможность составления/определения плана операций вождения на основе определения для необходимых событий. Суженные события, которые должны предполагаться, могут уменьшать время обработки при составлении соответствующего плана операций вождения. Содействие при движении в силу этого может выполняться с уменьшенным временем задержки.
[0254] (5-10) Способ планирования вождения согласно одному или более вариантов осуществления настоящего изобретения включает в себя задание одного или более возможных вариантов позиций остановки для выполнения остановки посредством рассматриваемого транспортного средства, с использованием результатов определения для взаимосвязей между рассматриваемым транспортным средством и множеством событий, с которыми встречается рассматриваемое транспортное средство, в виде временного ряда при движении по первому маршруту. Один или более возможных вариантов позиций остановки задаются для соответствующих событий. Способ планирования вождения дополнительно включает в себя составление плана операций вождения для окружения, с которым встречается рассматриваемое транспортное средство, с использованием результатов определения для взаимосвязей между рассматриваемым транспортным средством и множеством событий, с которыми встречается рассматриваемое транспортное средство в возможных вариантах позиций остановки. Когда используется способ планирования вождения согласно одному или более вариантов осуществления настоящего изобретения, могут получаться работа и преимущество, описанные в (5-1).
[0255] Варианты осуществления, поясненные выше, описываются для того, чтобы упрощать понимание настоящего изобретения, а не для того, чтобы ограничивать настоящее изобретение. Следовательно, подразумевается, что элементы, раскрытые в вышеописанных вариантах осуществления, включают в себя все конструктивные модификации и эквиваленты, которые попадают в пределы объема настоящего изобретения.
[0256] Таким образом, в настоящем описании, один или более вариантов осуществления аппаратуры содействия при движении согласно настоящему изобретению описываются посредством примерной иллюстрации аппаратуры 100 содействия при движении, которая включает в себя устройство 10 определения окружения, устройство 20 планирования вождения и устройство 30 вывода, но настоящее изобретение не ограничено этим.
[0257] В настоящем описании, один или более вариантов осуществления устройства определения окружения согласно настоящему изобретению описываются посредством примерной иллюстрации устройства 10 определения окружения, которое включает в себя процессор 11 определения, но настоящее изобретение не ограничено этим. В настоящем описании, один или более вариантов осуществления устройства планирования вождения согласно настоящему изобретению описываются посредством примерной иллюстрации устройства 20 планирования вождения, которое включает в себя процессор 21 планирования вождения, но настоящее изобретение не ограничено этим. В настоящем описании, один или более вариантов осуществления устройства вывода согласно настоящему изобретению описываются посредством примерной иллюстрации устройства 30 вывода, которое включает в себя процессор 31 управления выводом, но настоящее изобретение не ограничено этим. Следует понимать, что процессор 11 определения, процессор 21 планирования вождения и процессор 31 управления выводом могут быть сконфигурированы как один процессор и также могут быть сконфигурированы как несколько процессоров.
[0258] В настоящем описании, пример бортовой аппаратуры описывается посредством примерной иллюстрации бортовой аппаратуры 200, которая включает в себя контроллер 210 транспортного средства, навигационное устройство 220, устройство 230 обнаружения объектов, устройство 240 недопущения выезда за пределы полосы движения, устройство 250 вывода, устройство 260 обнаружения, приводное устройство 270 и устройство 280 рулевого управления, но настоящее изобретение не ограничено этим. Отсутствуют ограничения на компоновку любого из устройства определения окружения, устройства планирования вождения, устройства вывода и аппаратуры содействия при движении согласно настоящему изобретению, наряду с любым существующим устройством или аппаратурой, которая является применимой к транспортным средствам на момент подачи заявки этой заявки.
Описание номеров ссылок
[0259] 1 - система содействия при движении
100 - аппаратура содействия при движении
10 - устройство определения окружения
11 - процессор определения
20 - устройство планирования вождения
21 - процессор планирования вождения
30 - устройство вывода
31 - процессор управления выводом
210 - контроллер транспортного средства
220 - навигационное устройство
221 - устройство обнаружения позиции
222 - картографическая информация
223 - дорожная информация
224 - информация правил дорожного движения
230 - устройство обнаружения объектов
231 - камера
232 - радарное устройство
240 - устройство недопущения выезда за пределы полосы движения
241 - камера
242 - дорожная информация
250 - устройство вывода
251 - дисплей
252 - динамик
260 - устройство обнаружения
261 - датчик угла поворота при рулении
262 - датчик скорости транспортного средства
263 - датчик ориентации
270 - приводное устройство
271 - тормозное устройство
280 - устройство рулевого управления
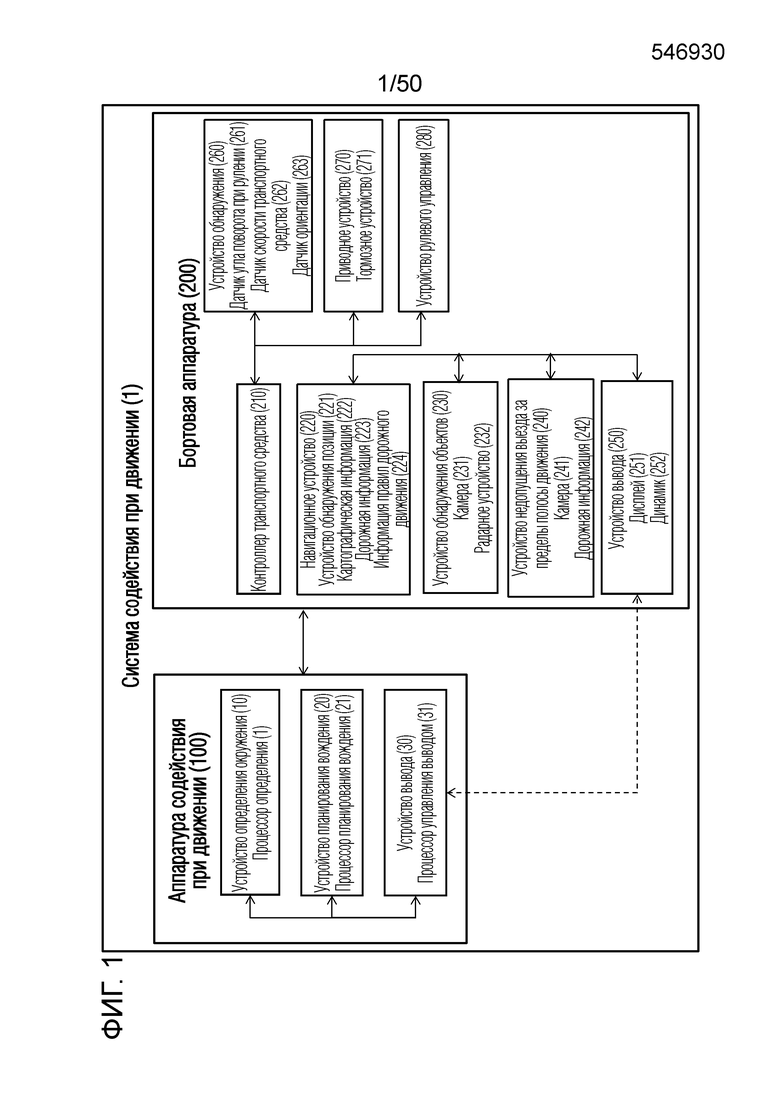


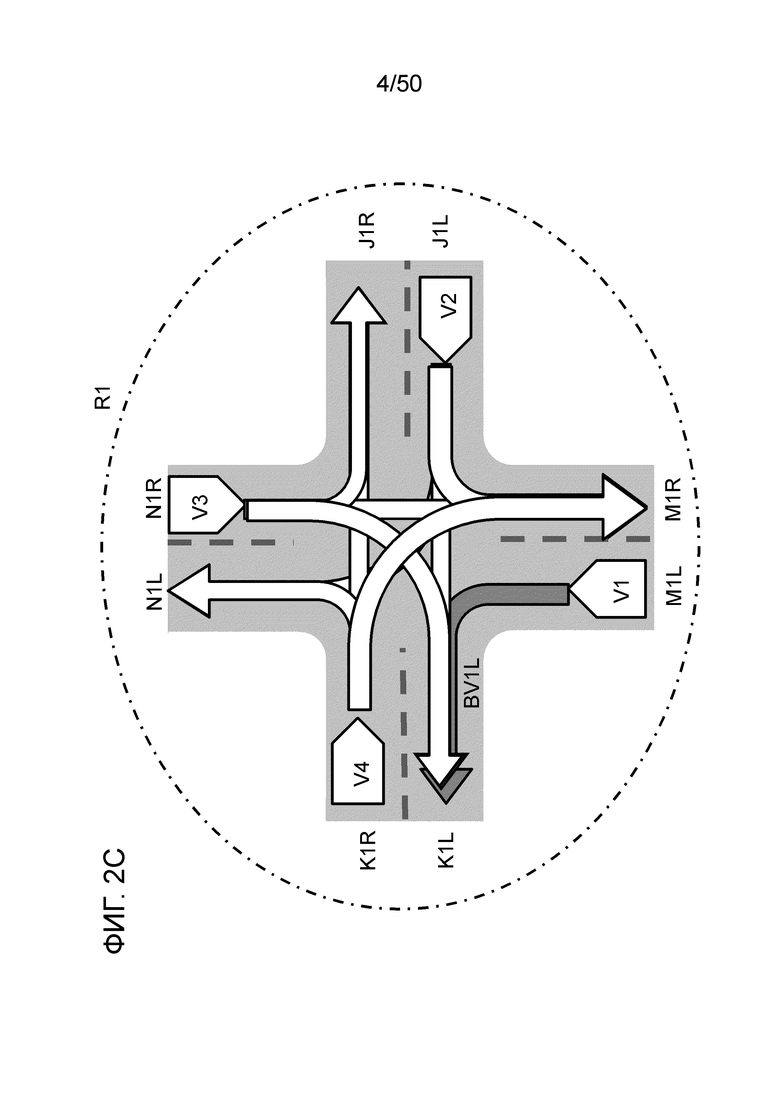
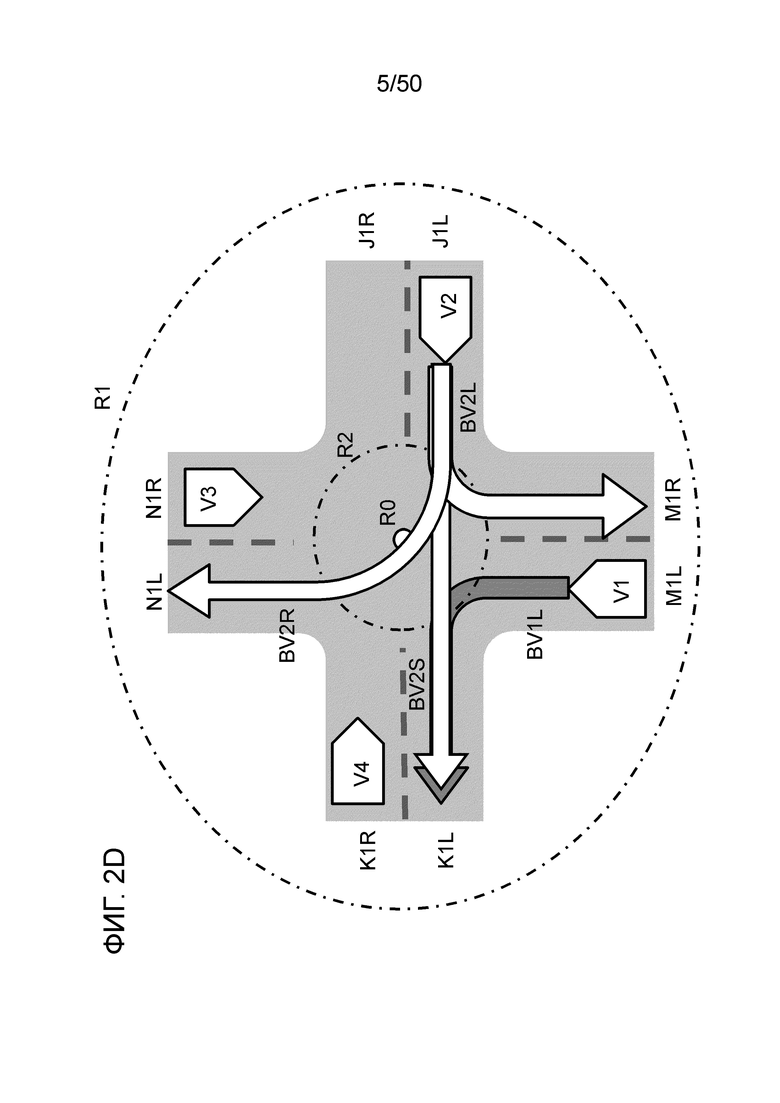

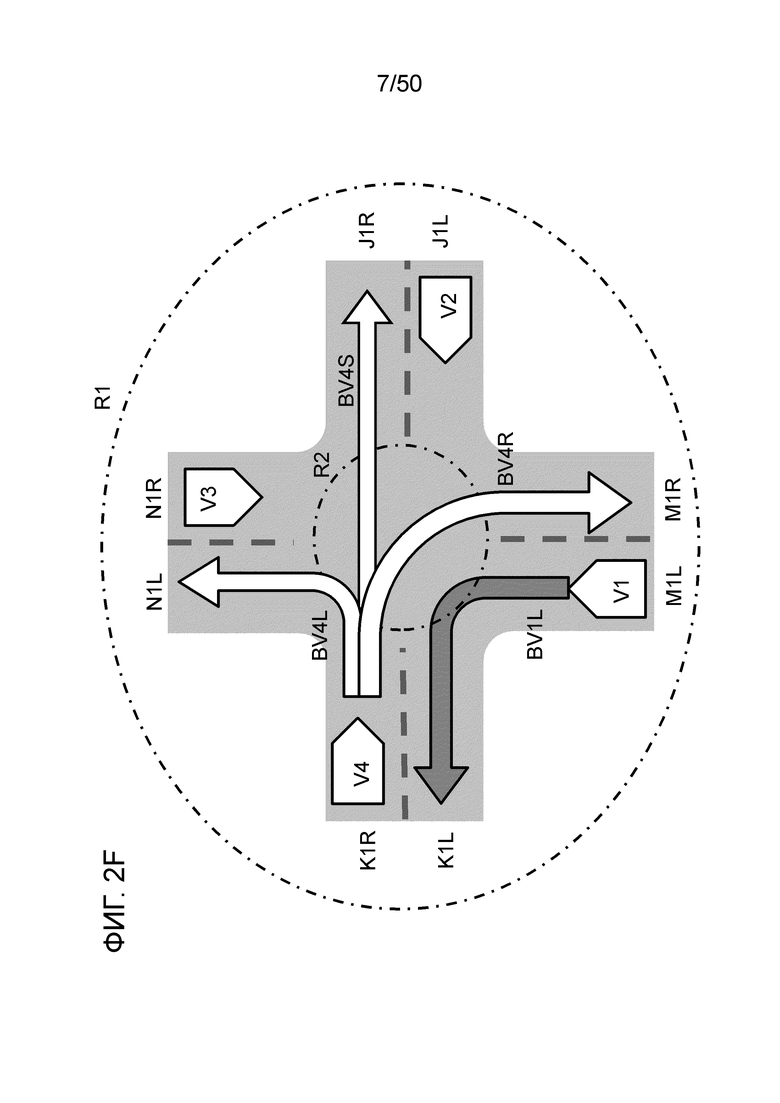
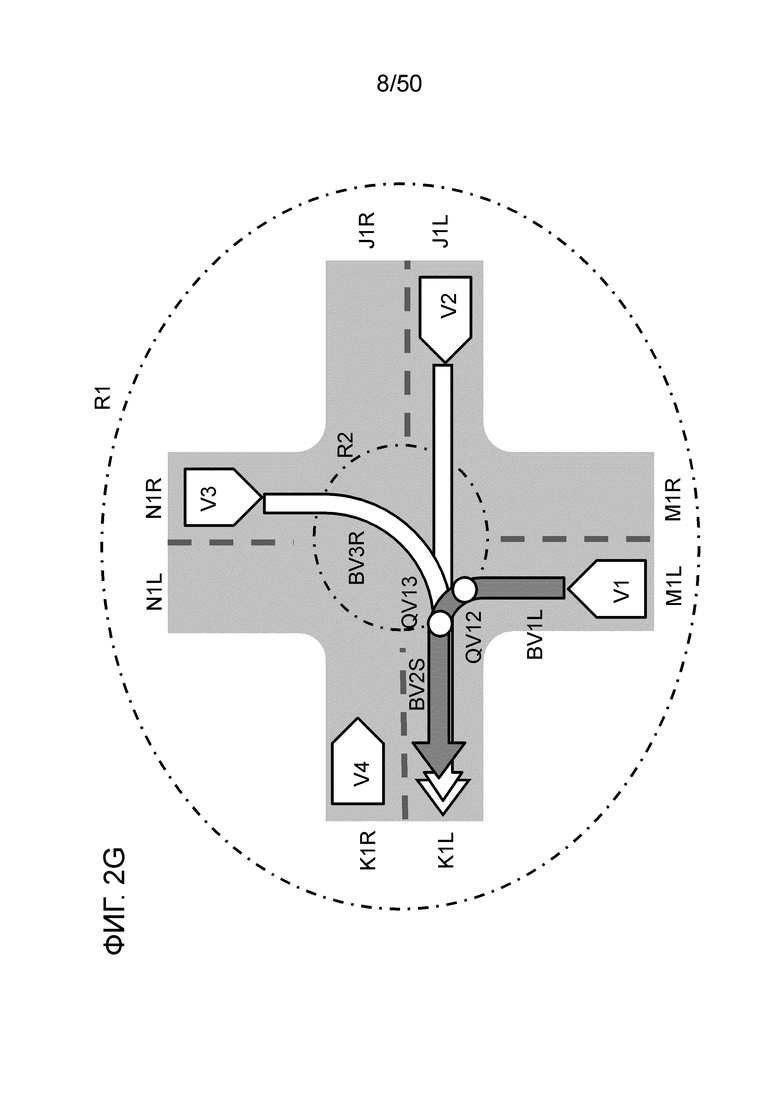
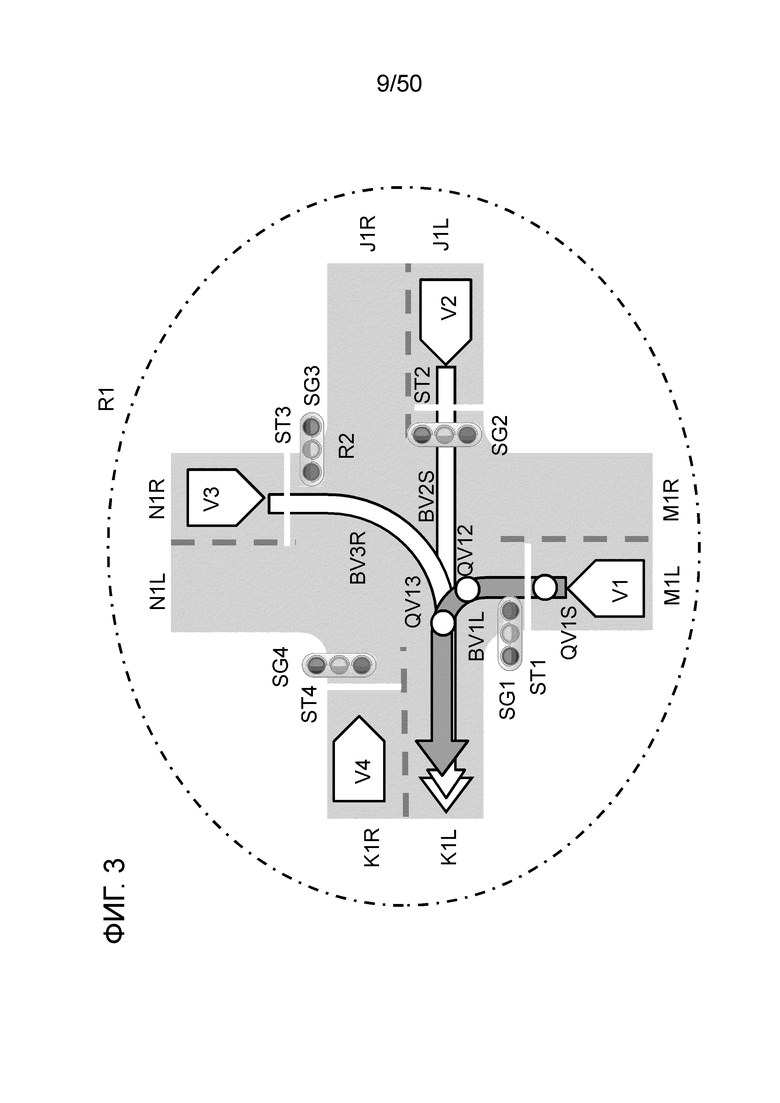

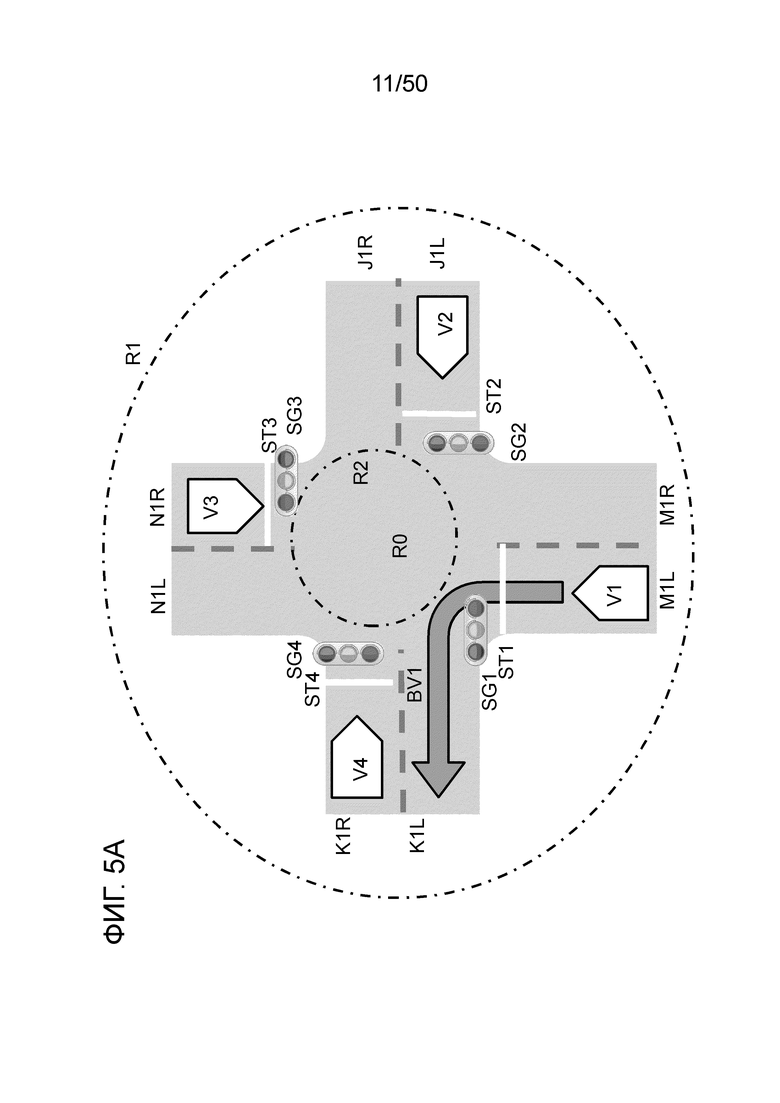
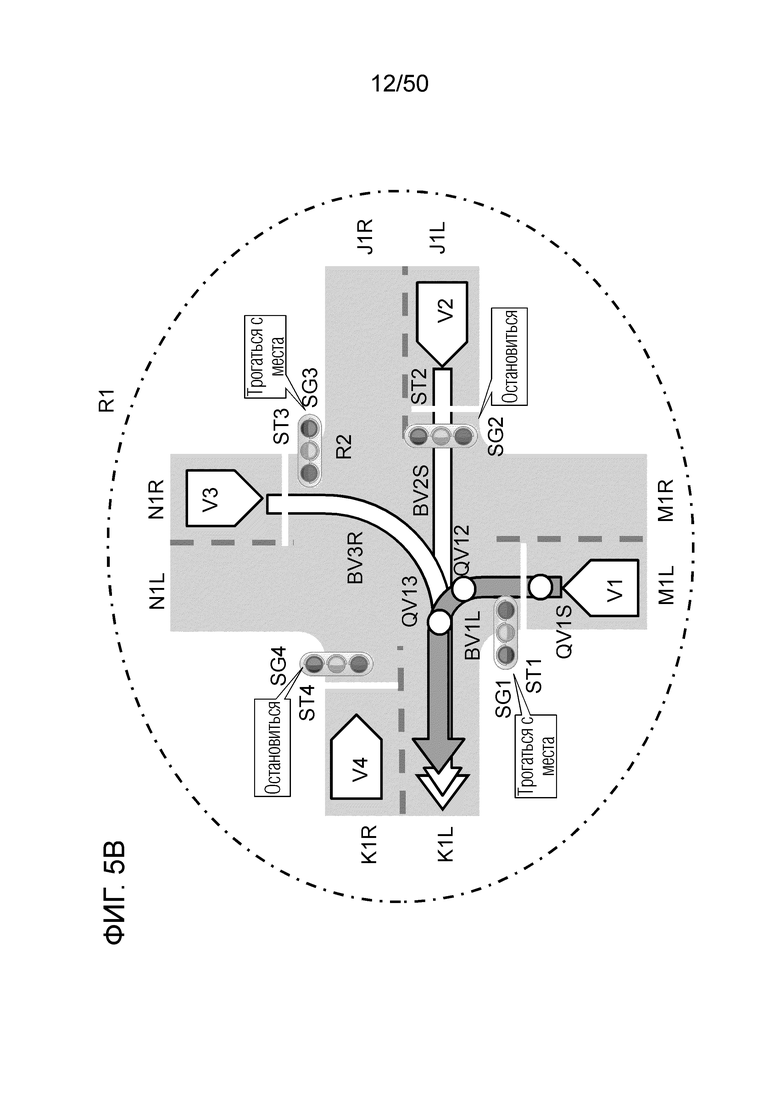


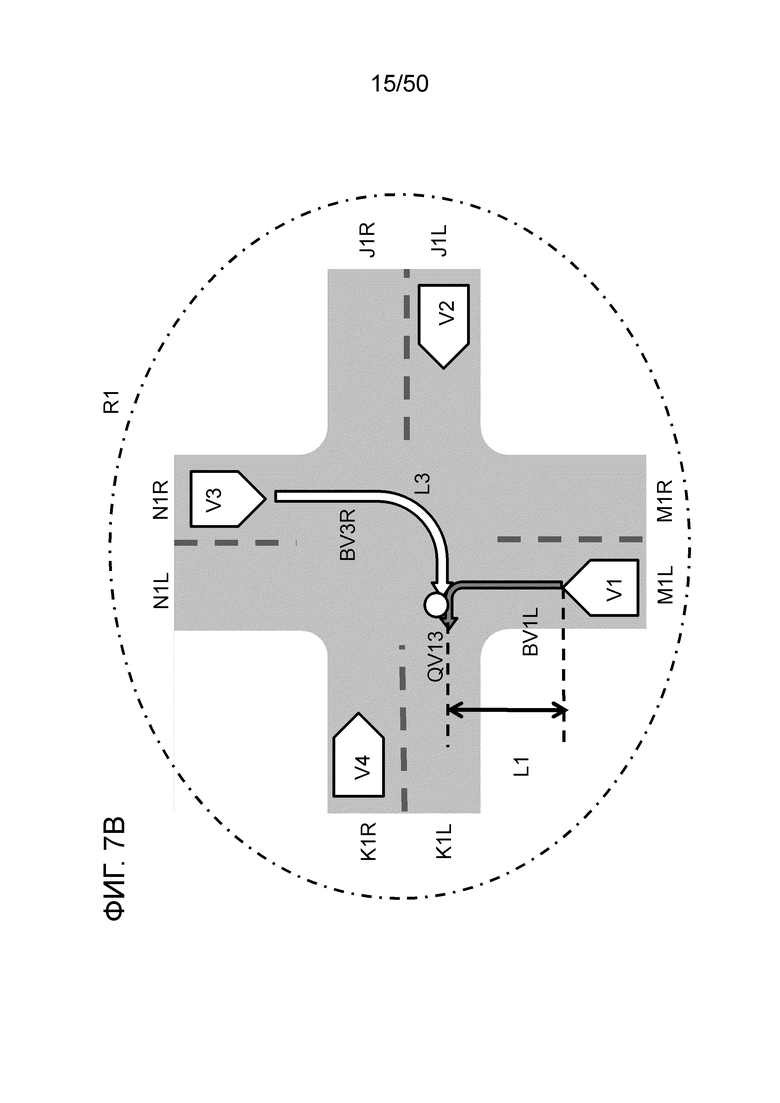







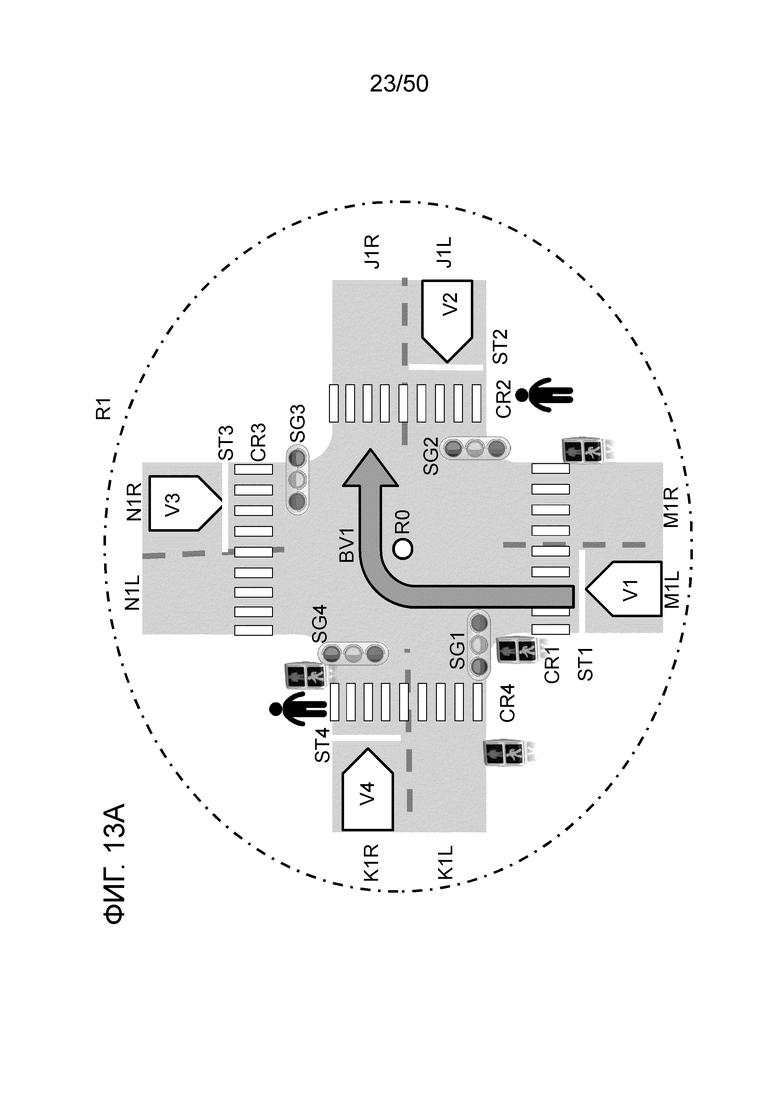




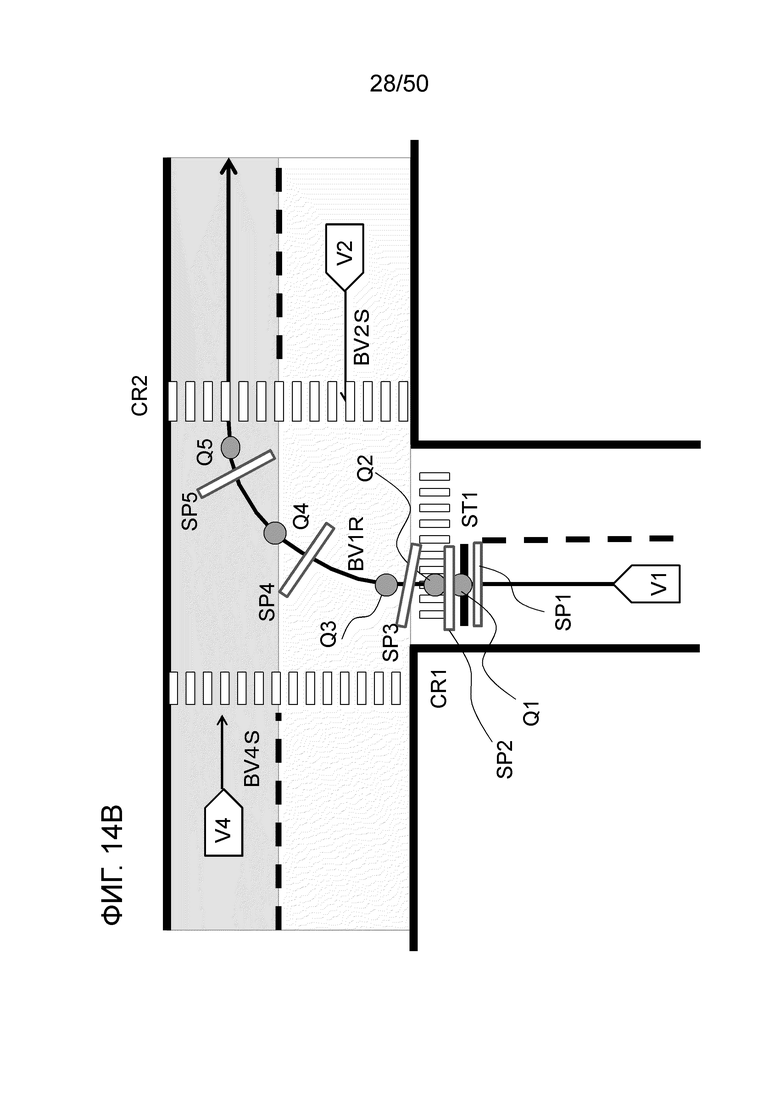
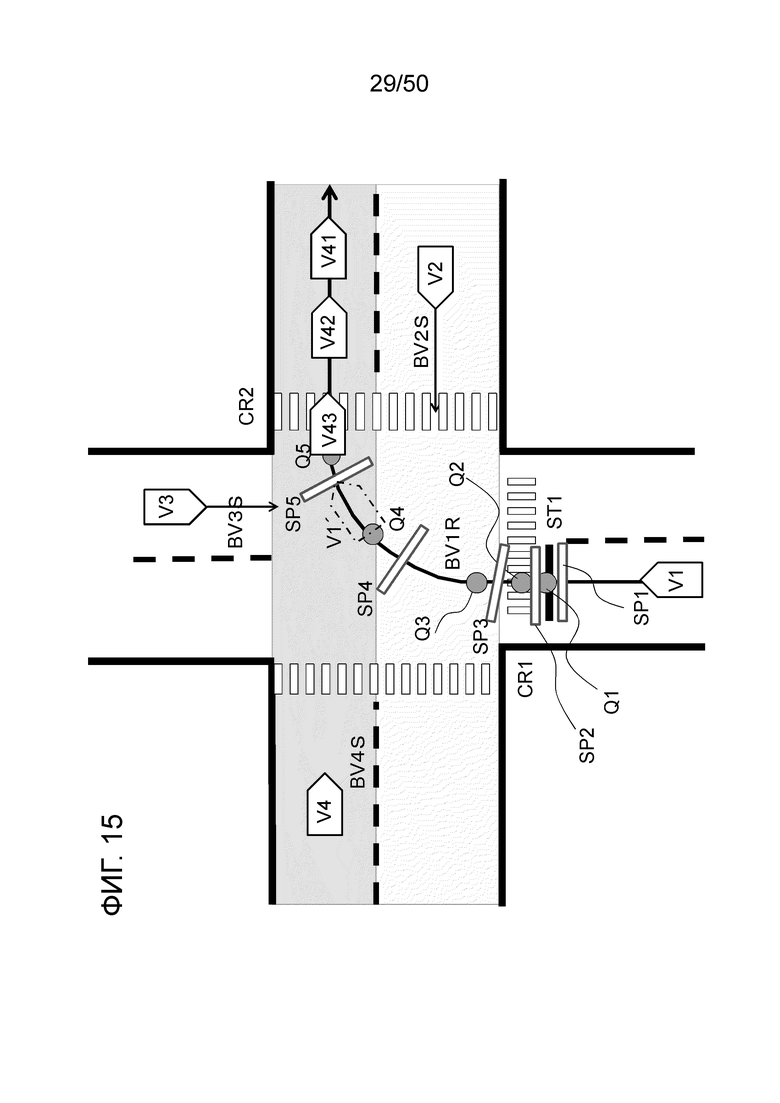


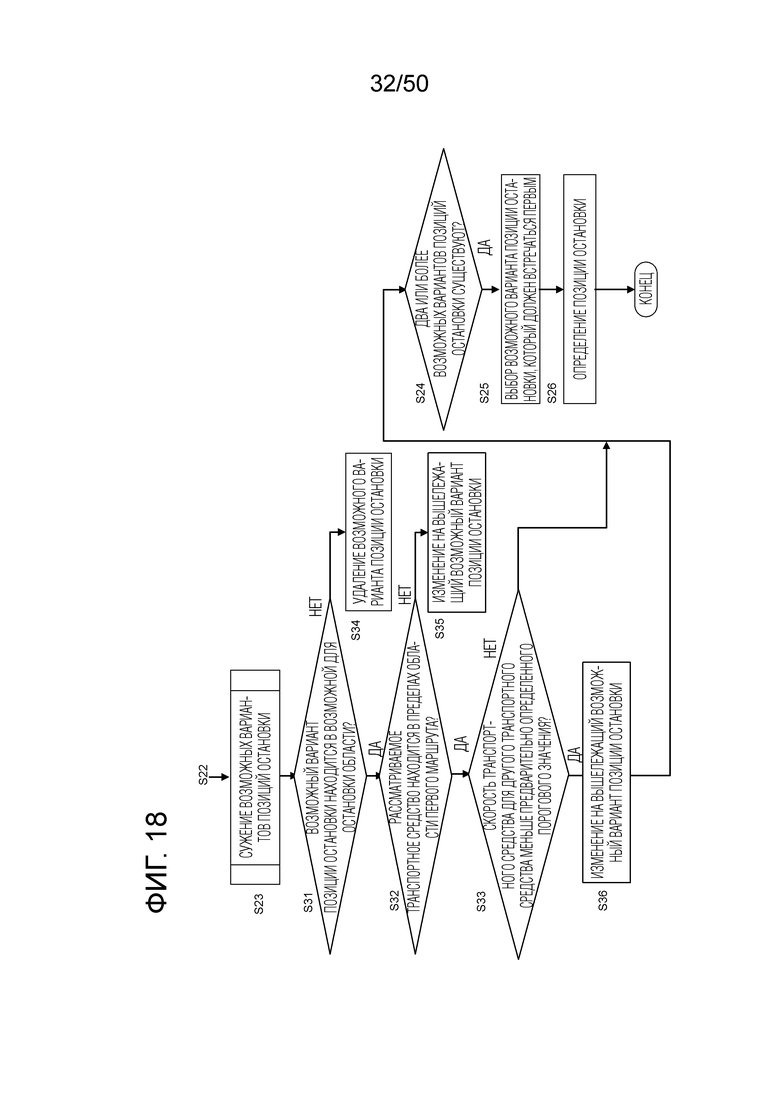
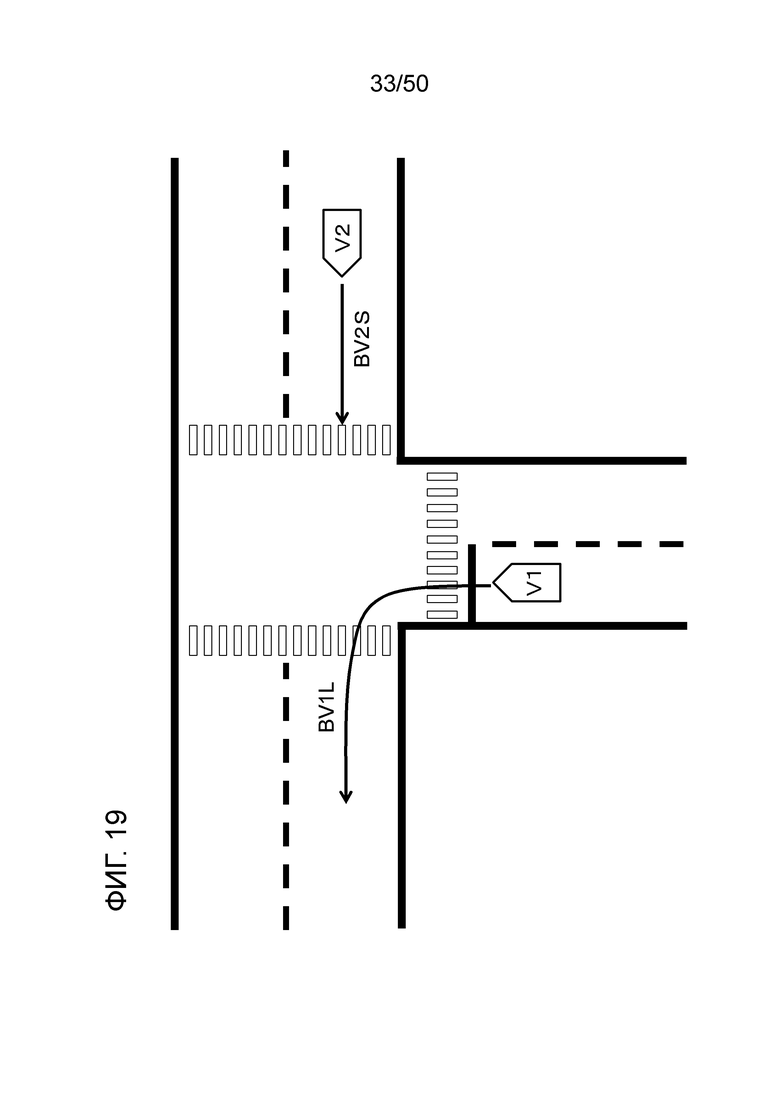

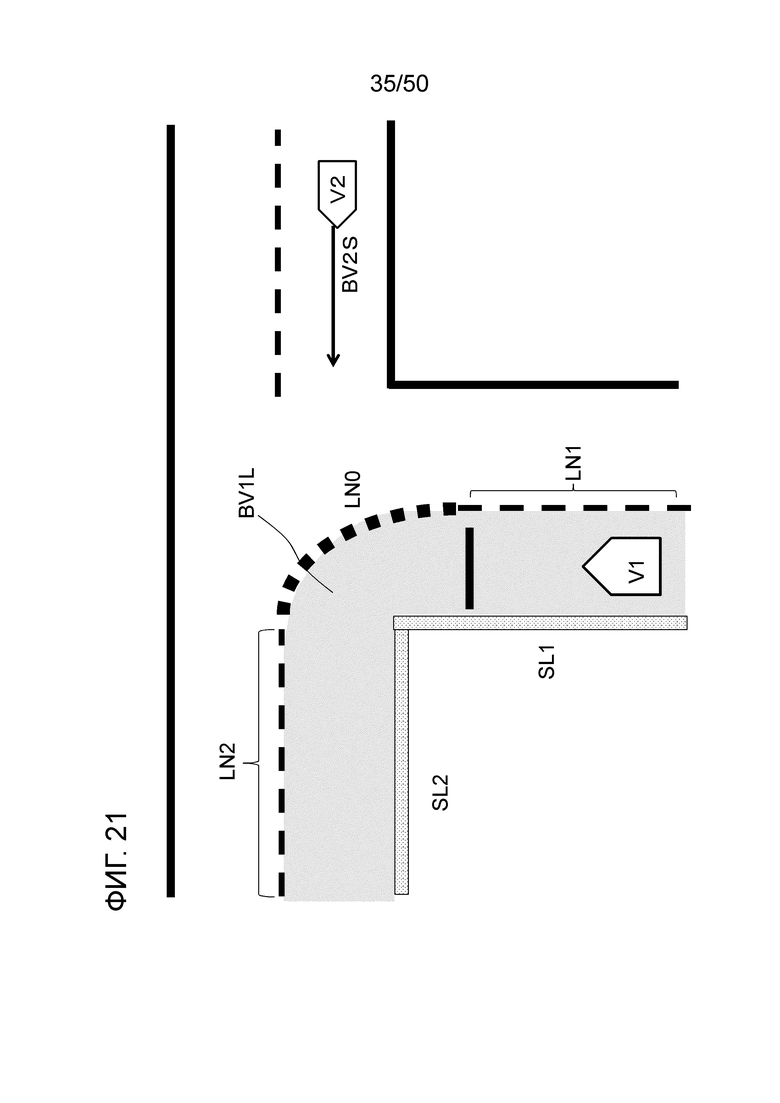

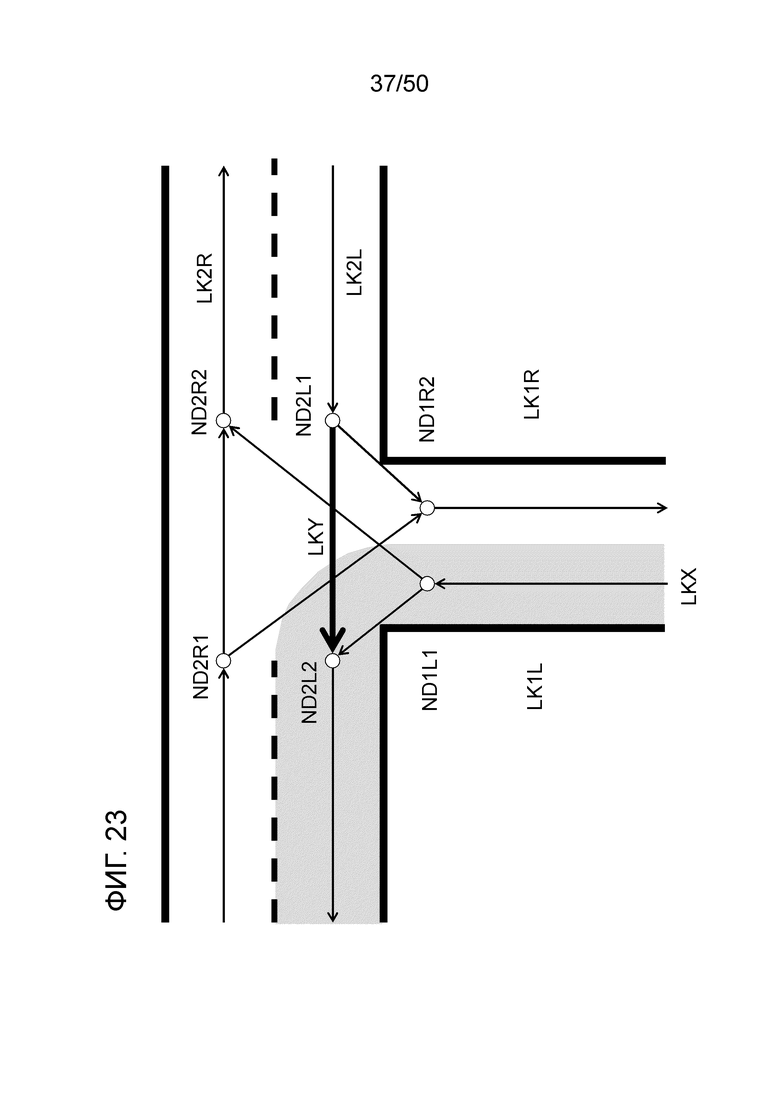

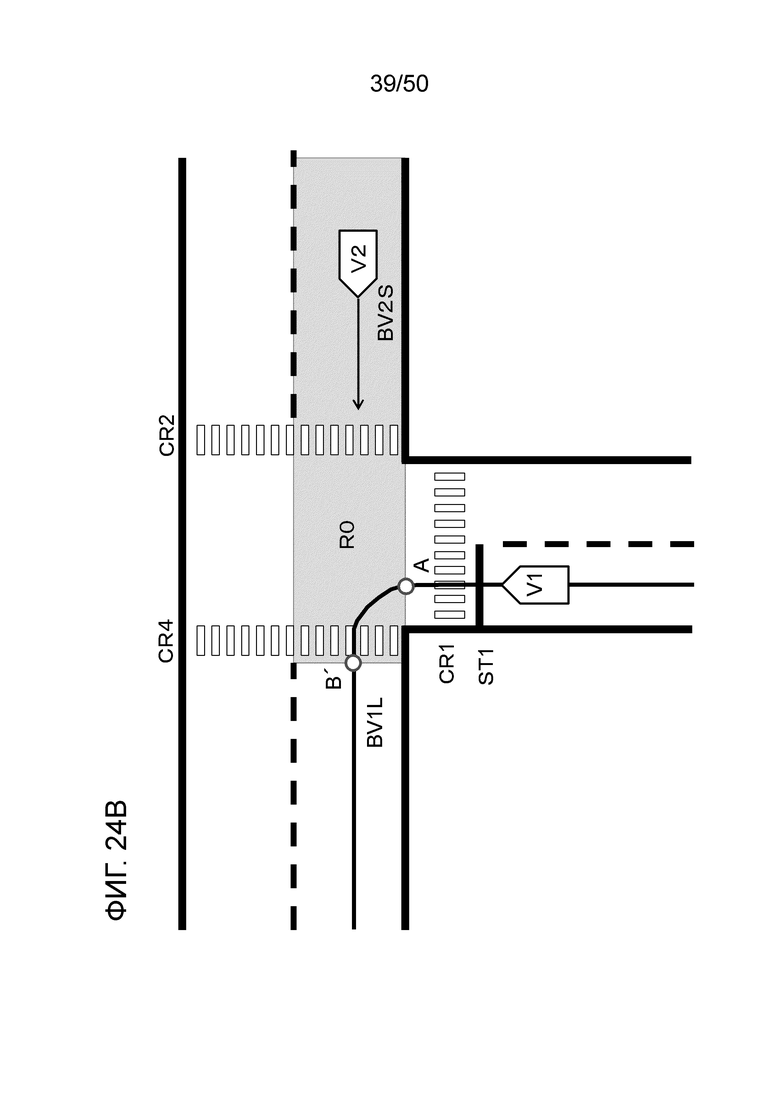
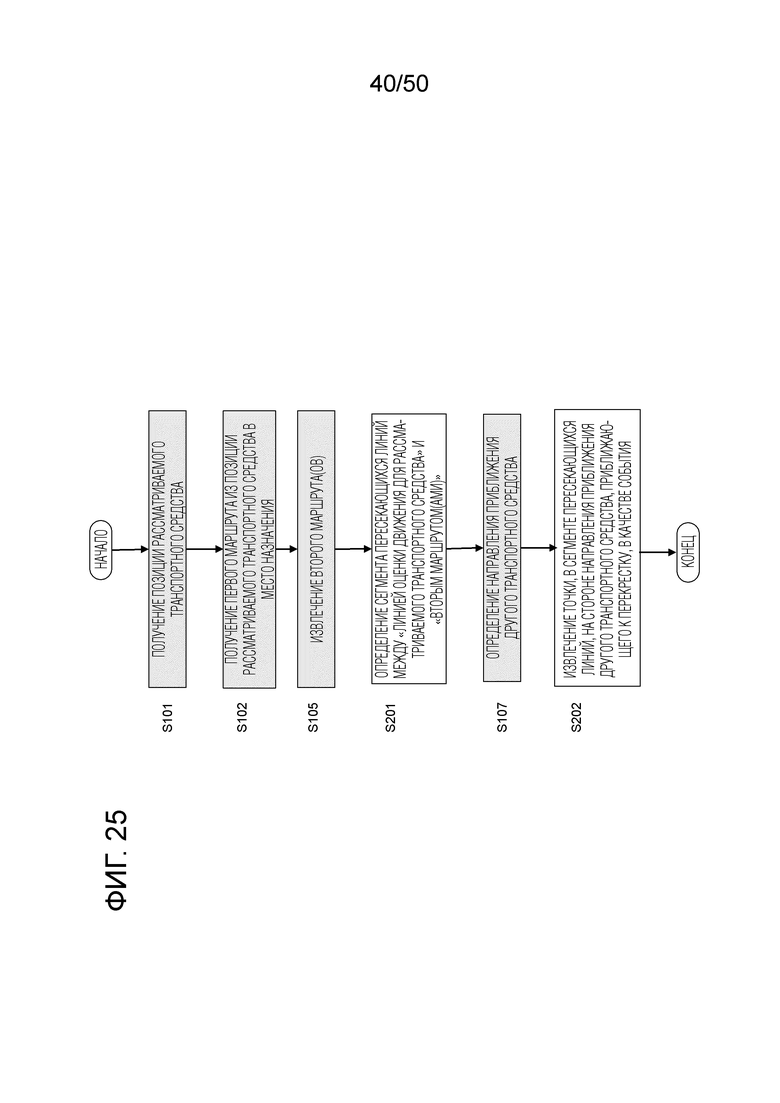

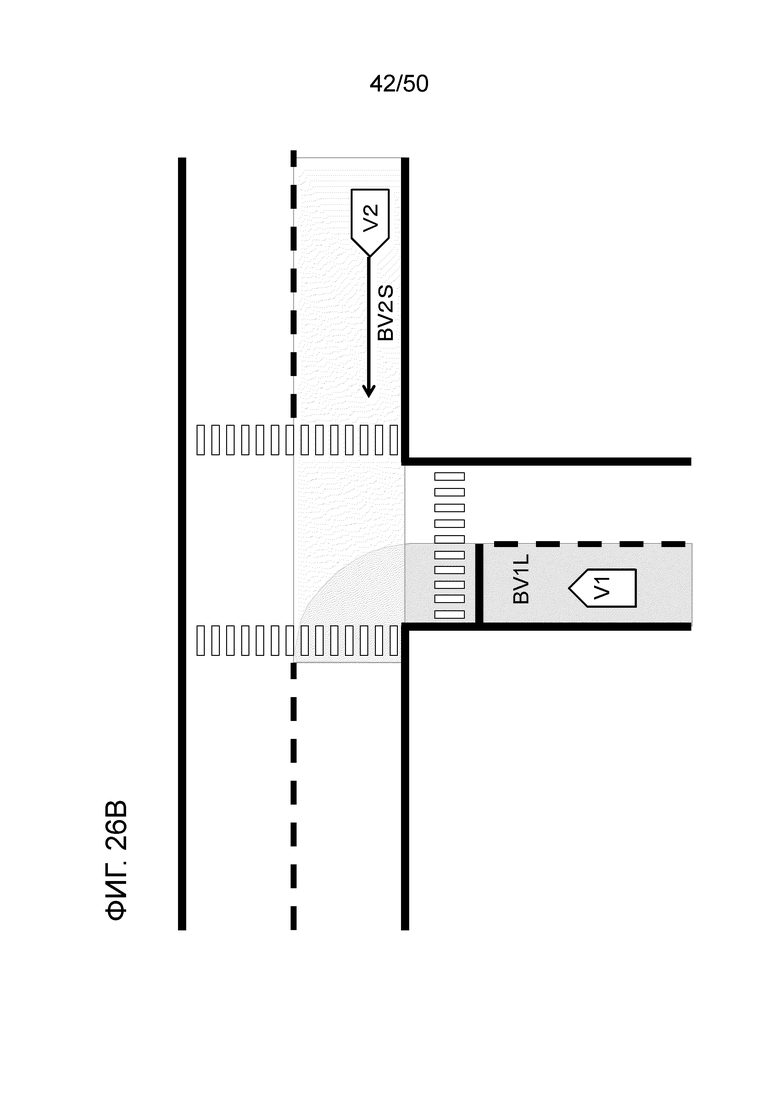

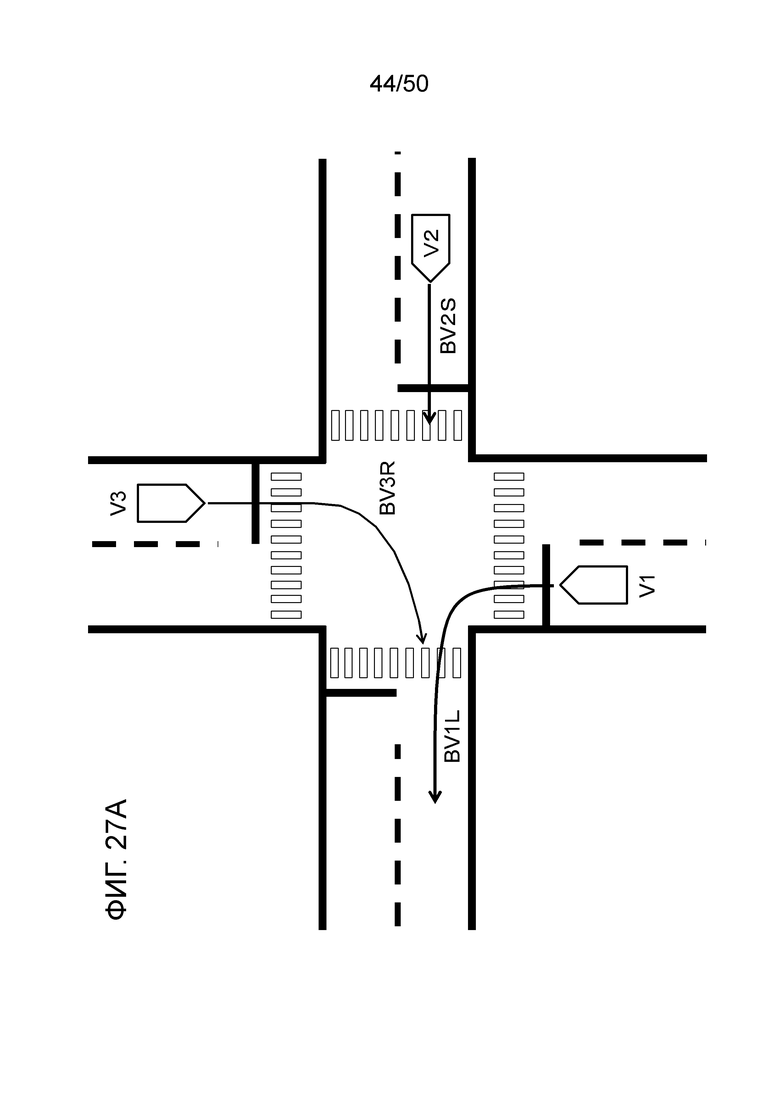

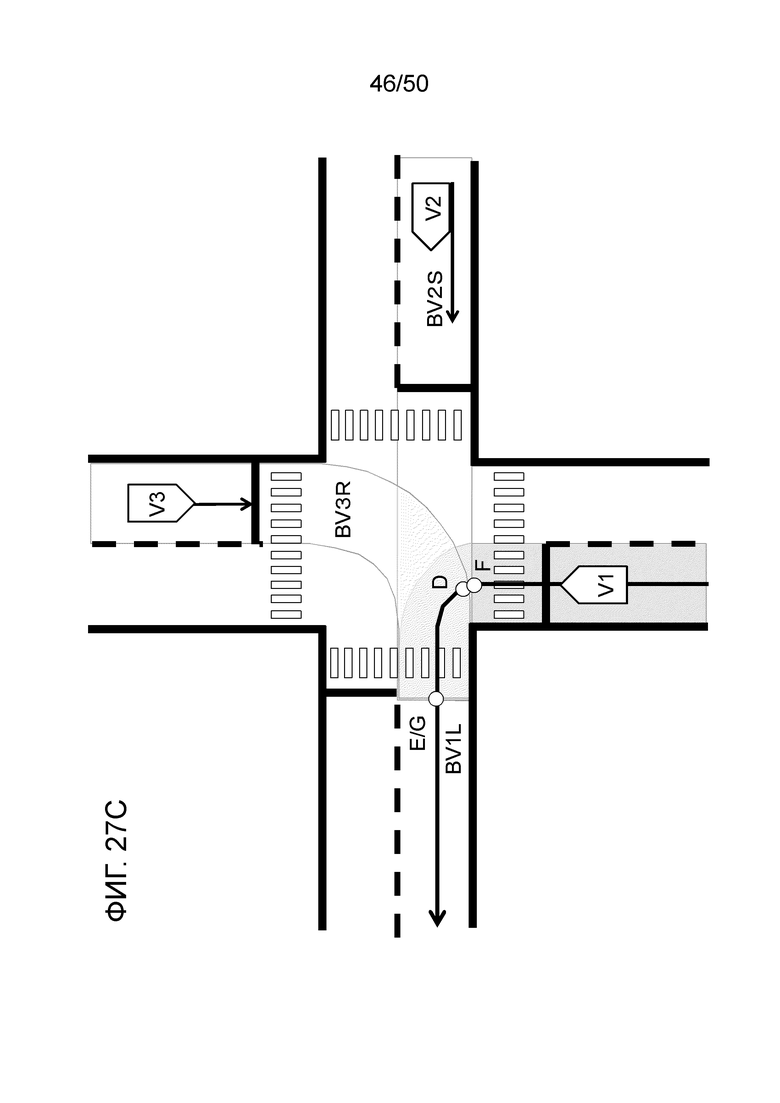




Группа изобретений относится к области обнаружения окружения. Устройство определения окружения включает процессор определения, выполненный с возможностью определять встречное окружение рассматриваемого транспортного средства. Процессор определения извлекает множество событий, с которыми встречается рассматриваемое транспортное средство, движущееся по первому маршруту, на основе взаимосвязей между первым маршрутом, по которому движется рассматриваемое транспортное средство, и вторыми маршрутами, содержащими дорожные структуры, имеющими точки пересечений с первым маршрутом. Процессор определения определяет окружение с использованием взаимосвязи между каждым из извлеченных событий и рассматриваемым транспортным средством. Обеспечивается быстрое определение окружения, с которым встречается рассматриваемое транспортное средство, движущееся по маршруту. 3 н. и 10 з.п. ф-лы, 50 ил.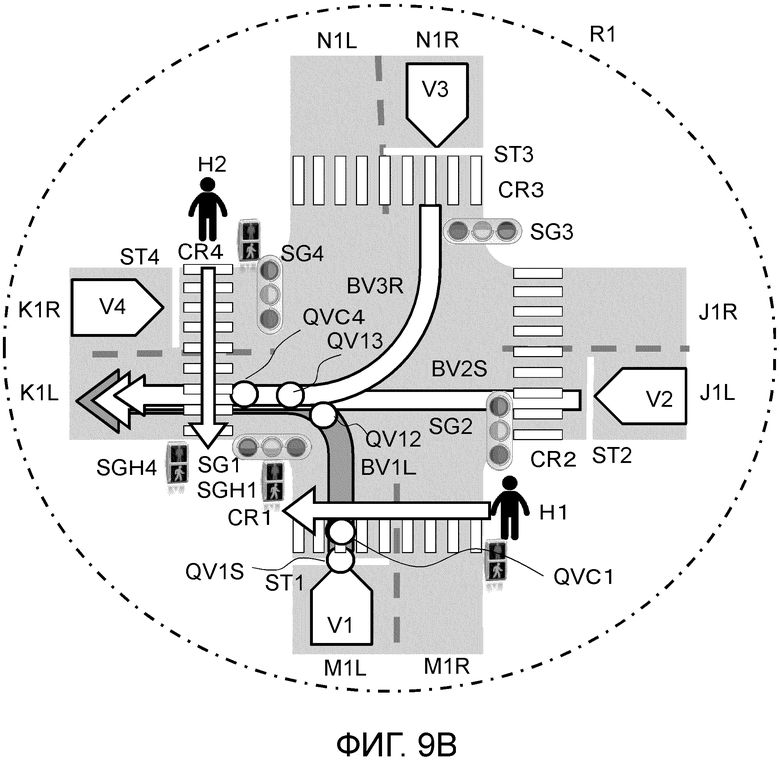
1. Устройство определения окружения, содержащее
процессор определения, выполненный с возможностью, при определении действия вождения рассматриваемого транспортного средства, движущегося по маршруту, определять окружение, с которым встречается рассматриваемое транспортное средство,
причем процессор определения выполнен с возможностью:
извлекать множество событий, с которыми встречается рассматриваемое транспортное средство, движущееся по первому маршруту, на основе взаимосвязей между первым маршрутом, по которому движется рассматриваемое транспортное средство, и вторыми маршрутами, содержащими дорожные структуры, имеющие точки пересечений с первым маршрутом; и
определять окружение с использованием взаимосвязи между каждым из извлеченных событий и рассматриваемым транспортным средством.
2. Устройство определения окружения по п. 1, в котором, в процессе извлечения событий, процессор определения использует взаимосвязь, извлекаемую из правила дорожного движения на первом маршруте и правила дорожного движения на каждом из вторых маршрутов, чтобы извлекать событие, с которым встречается рассматриваемое транспортное средство, движущееся по первому маршруту.
3. Устройство определения окружения по п. 1, в котором, в процессе извлечения событий, процессор определения использует информацию по обнаружению объекта, существующего рядом с рассматриваемым транспортным средством, чтобы извлекать событие, с которым встречается рассматриваемое транспортное средство, движущееся по первому маршруту.
4. Устройство определения окружения по п. 1, в котором, в процессе извлечения событий, процессор определения использует позиционную информацию наличия объекта для того, чтобы извлекать событие, с которым встречается рассматриваемое транспортное средство, движущееся по первому маршруту.
5. Устройство определения окружения по п. 1, в котором процессор определения использует правило дорожного движения на первом маршруте и правило дорожного движения на каждом из вторых маршрутов, чтобы получать уровень приоритета относительно проезда по первому маршруту и по каждому из вторых маршрутов, и использует уровень приоритета для того, чтобы извлекать событие, с которым встречается рассматриваемое транспортное средство, движущееся по первому маршруту.
6. Устройство определения окружения по п. 1, в котором процессор определения использует информацию светофоров первого маршрута и информацию светофоров каждого из вторых маршрутов, чтобы получать уровень приоритета относительно проезда по первому маршруту и по каждому из вторых маршрутов, и использует уровень приоритета для того, чтобы извлекать событие, с которым встречается рассматриваемое транспортное средство, движущееся по первому маршруту.
7. Устройство определения окружения по п. 1, в котором процессор определения использует дорожную информацию первого маршрута и дорожную информацию каждого из вторых маршрутов, чтобы получать уровень приоритета относительно проезда по первому маршруту и по каждому из вторых маршрутов, и использует уровень приоритета для того, чтобы извлекать событие, с которым встречается рассматриваемое транспортное средство, движущееся по первому маршруту.
8. Аппаратура содействия при движении, содержащая
устройство определения окружения по любому из пп. 1-7 и
процессор планирования вождения, выполненный с возможностью планировать действие вождения рассматриваемого транспортного средства, движущегося по первому маршруту, с использованием взаимосвязей между событиями, определенными посредством процессора определения, и субъектом.
9. Аппаратура содействия при движении по п. 8, в которой, в процессе извлечения событий, процессор планирования вождения использует позиционную информацию наличия объекта для того, чтобы планировать действие вождения для события, с которым встречается рассматриваемое транспортное средство, движущееся по первому маршруту.
10. Аппаратура содействия при движении по п. 8, в которой процессор планирования вождения использует правило дорожного движения на первом маршруте и правило дорожного движения на каждом из вторых маршрутов, чтобы получать уровень приоритета относительно проезда по первому маршруту и по каждому из вторых маршрутов, и использует уровень приоритета для того, чтобы планировать действие вождения для события, с которым встречается рассматриваемое транспортное средство, движущееся по первому маршруту.
11. Аппаратура содействия при движении по п. 8, в которой процессор планирования вождения использует информацию светофоров первого маршрута и информацию светофоров каждого из вторых маршрутов, чтобы получать уровень приоритета относительно проезда по первому маршруту и по каждому из вторых маршрутов, и использует уровень приоритета для того, чтобы планировать действие вождения для события, с которым встречается рассматриваемое транспортное средство, движущееся по первому маршруту.
12. Аппаратура содействия при движении по п. 8, в которой процессор планирования вождения использует дорожную информацию первого маршрута и дорожную информацию каждого из вторых маршрутов, чтобы получать уровень приоритета относительно проезда по первому маршруту и по каждому из вторых маршрутов, и использует уровень приоритета для того, чтобы планировать действие вождения для события, с которым встречается рассматриваемое транспортное средство, движущееся по первому маршруту.
13. Способ определения окружения с использованием процессора определения, выполненного с возможностью определять окружение, с которым встречается рассматриваемое транспортное средство, движущееся по маршруту, при этом способ определения окружения содержит этапы, на которых:
извлекают вторые маршруты, содержащие дорожные структуры, имеющие точки пересечений с первым маршрутом, по которому движется рассматриваемое транспортное средство;
извлекают множество событий, с которыми встречается рассматриваемое транспортное средство, движущееся по первому маршруту, на основе взаимосвязей между первым маршрутом и каждым из вторых маршрутов; и
определяют окружение с использованием взаимосвязи между извлеченным событием и рассматриваемым транспортным средством.
| US 20090058678 A1, 05.03.2009 | |||
| US 20130325241 A1, 05.12.2013 | |||
| РЕАКТОР-ПОЛИМЕРИЗАТОР | 2009 |
|
RU2495713C2 |
| US 20140148998 A1, 29.05.2014 | |||
| СПОСОБ НАБЛЮДЕНИЯ ЗА ДОРОЖНОЙ СИТУАЦИЕЙ С ДВИЖУЩЕГОСЯ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2010 |
|
RU2432276C1 |
| СИСТЕМА КОНТРОЛЯ СОБЛЮДЕНИЯ ПРАВИЛ ДОРОЖНОГО ДВИЖЕНИЯ | 2007 |
|
RU2384887C2 |

