Изобретение относится к дефлектометру с падающим грузом.
Дефлектометр с падающим грузом (ДПГ) является устройством для неразрушающего контроля, используемым гражданскими инженерами для оценки физических свойств конструкций дорожного покрытия. Данные, полученные с помощью ДПГ, используются главным образом для оценки несущей способности, среди прочего, дорожных покрытий с поверхностями из бетона на портланд-цементе (БПЦ) или асфальтобетона (АБ). К областям применения относятся дороги, дорожные покрытия в аэропортах, контейнерные терминалы и рельсовые пути. Дефлектометр с падающим грузом обычно встроен в прицеп, который может быть отбуксирован к месту испытаний другим транспортным средством, но также может быть встроен непосредственно в транспортное средство.
Дефлектометр с падающим грузом выполнен с возможностью приложения к поверхности дорожного покрытия импульсной нагрузки, которая имитирует нагрузку, создаваемую катящимся колесом транспортного средства. Указанная нагрузка создается при падении большого груза на комплект резиновых амортизаторов. Результирующее усилие передается дорожному покрытию через круглую нагрузочную плиту. Наверху нагрузочной плиты установлен датчик нагрузки или другой чувствительный к нагрузке приемник, который измеряет нагрузку, приложенную к поверхности дорожного покрытия. Вдоль луча, проходящего от центра нагрузочной плиты, линейным образом установлен ряд датчиков прогиба, таких как геофоны или акселерометры, которые измеряют прогиб поверхности дорожного покрытия, возникший в ответ на нагрузку, на различных расстояниях от центра приложения нагрузки. Данные, полученные от ДПГ, могут быть использованы для расчета параметров, связанных с жесткостью, например модуля Юнга слоев многослойной структуры дорожных покрытий, таких как покрытия дорог или аэропортов, содержащие БПЦ или АБ.
Традиционно в ДПГ вес поднимается гидравлическим образом вдоль вертикального направляющего стержня или колонны и удерживается на заданной высоте с помощью захватного механизма до момента, когда должно быть произведено измерение и оператором ДПГ выдается команда на падение. Затем захватный механизм отсоединяется, и груз падает на средство передачи усилия, содержащее круглую нагрузочную плиту с известным диаметром, которая перед падением груза была опущена для обеспечения контакта с поверхностью дорожного покрытия в желаемом месте выполнения измерения. Между средством передачи усилия и грузом выполнено эластичное средство, например амортизаторы в виде резиновых блоков, для создания идеального полусинусоидального ударного усилия, действующего на дорожное покрытие. Средство передачи усилия обычно содержит средство определения усилия для измерения фактического ударного усилия. Так как падающий груз имеет существенную массу, обычно от 50 до 750 килограмм, указанный груз обычно подбирают и поднимают обратно в зафиксированное положение с помощью гидравлического механизма или аналогичного средства. Примерами ДПГ, описанных выше, являются дефлектометры, например, раскрытые в патентных документах JP-A-2007-205955 и DE-U-9305327. Примеры таких ДПГ также описаны в статье «Faldloddets historie» [«История дефлектометров с падающим грузом»], Bohn, Axel О., Asfalt, стр. 4-11, сентябрь 1989 г., ISSN 0004-4318, в которой описано развитие дефлектометров с падающим грузом с 1964 г. по 1989 г.
Один главный недостаток таких гидравлически управляемых ДПГ заключается в том, что цикл измерения занимает относительно продолжительное время, особенно если требуется выполнить последовательные измерения в одном и том же месте. Главной причиной этого является то, что процесс опускания гидравлического подъемного средства для подбора груза, подъема груза до фиксатора и отсоединения груза от гидравлического подъемного средства осуществляется относительно медленно. Кроме того, после нескольких повторяющихся падений в одном месте нагрузочная плита должна быть поднята до положения транспортировки и закреплена, а затем снова опущена в следующем месте выполнения измерения. В уровне техники последнее является основной причиной большой продолжительности циклов испытаний. Когда требуется выполнить тысячи последовательных измерений вдоль подвергаемой исследованию дороги, суммарная продолжительность указанных процессов понижает эффективность всего исследования.
В патентном документе WO 2015/051798, включенном в данный документ посредством ссылки, предложено использовать электрический подъемный механизм. Электрический подъемный механизм содержит высокомоментный электрический двигатель, непосредственно присоединенный к резьбовому шпинделю. Груз, который необходимо поднять и сбросить, находится в постоянном соединении со шпинделем по принципу перемещающейся гайки, что обеспечивает возможность его поднятия и сбрасывания путем соответственно включения или выключения электрического двигателя. Несмотря на то что такой электрический подъемный механизм показал себя очень успешным с точки зрения сокращения продолжительности циклов подъема и падения, он имеет ряд недостатков. Очевидно, что постоянное соединение между грузом и резьбовым шпинделем с электрическим двигателем находится в некотором противоречии со стремлением к свободному падению груза, поскольку во время падения груза шпинделю и двигателю придается вращение. Таким образом, некоторое количество потенциальной энергии используется для ускорения вращения шпинделя и двигателя. Кроме того, даже при разомкнутых клеммах может возникать эффект торможения со стороны электрического двигателя, работающего во время падения в качестве генератора. Как объяснено в патентном документе WO 2015/051798, этот эффект торможения либо должен быть пренебрежимо малым, либо должен быть компенсирован, причем последнее приводит к дополнительному усложнению управляющего механизма.
Исходя из описанного уровня техники, целью изобретения является создание ДПГ, который устраняет вышеуказанные недостатки и при этом по-прежнему обеспечивает по меньшей мере те же преимущества в скорости цикла, что и известные ДПГ.
Согласно данному изобретению эта цель достигается с помощью дефлектометра, содержащего нагрузочную плиту, предназначенную для взаимодействия с испытуемой поверхностью, средства передачи усилия, предназначенные для передачи усилия к нагрузочной плите, амортизирующие средства, падающий груз, предназначенный для удара по указанным средствам передачи усилия через указанные амортизирующие средства с обеспечением создания усилия, передаваемого к нагрузочной плите через средства передачи усилия, направляющие средства для направления падающего груза к средствам передачи усилия, и подъемные средства, содержащие по меньшей мере один электрический двигатель для подъема падающего груза на заданную высоту над средствами передачи усилия, причем указанный по меньшей мере один электрический двигатель представляет собой линейный двигатель.
Дефлектометр с падающим грузом, в котором в качестве подъемных средств используется линейный электрический двигатель, содержит меньше подвижных частей по сравнению с известными устройствами, в которых используется либо электрический двигатель, приводящий в действие шпиндель для поднятия падающего груза, либо традиционный двигатель, такой как гидравлический двигатель, и, следовательно, исключает большую часть источников внутреннего трения в двигателе. Кроме того, линейные электрические двигатели могут обеспечить очень быстрое ускорение и подъем, даже в сравнении с другими электрическими двигателями. Это, в свою очередь, означает, что полный цикл испытаний, т.е. подъем и падение падающего груза, может быть выполнен быстро, так что в каждом местоположении ДПГ придется затратить меньше времени.
В соответствии с вариантом выполнения изобретения указанный по меньшей мере один электрический двигатель содержит постоянные магниты. При использовании постоянных магнитов для создания якоря линейного электрического двигателя устройство становится проще в обслуживании, поскольку отсутствует необходимость в электропроводке, в отличие от случая с использованием электромагнитов. Кроме того, постоянные магниты, как правило, поступают в виде предварительно изготовленных рядов, что делает первоначальную сборку ДПГ быстрой и эффективной с точки зрения затрат.
В предпочтительном варианте выполнения постоянные магниты образуют часть указанного падающего груза. При непосредственном соединении падающего груза с подвижной частью двигателя, т.е. с постоянными магнитами, устраняется потребность в механических передающих элементах, таких как ходовые винты, зубчатые ремни, реечная передача и червячные приводы. Следовательно, отсутствует механический износ, что приводит к исключительной надежности и более продолжительному сроку службы, при этом уменьшение числа механических частей сводит к минимуму техническое обслуживание и понижает стоимость системы.
В соответствии с вариантом выполнения изобретения подъемное средство содержит четыре линейных электрических двигателя. При наличии дополнительных и/или более мощных двигателей ДПГ может поднимать более тяжелые падающие грузы, в результате чего увеличивается диапазон ударного усилия, в котором может работать ДПГ, что повышает его эксплуатационную гибкость. При использовании четырех линейных электрических двигателей может быть обеспечен симметричный подъем в случае использования сбрасываемого груза с двумя ортогональными осями симметрии, например, подъем с помощью линейного электрического двигателя на каждом углу, так что при подъеме падающего груза не возникает крутящего момента.
В соответствии с вариантом выполнения изобретения падающий груз содержит по меньшей мере один датчик линейных перемещений.
При использовании датчика линейных перемещений положение падающего груза известно в любой момент времени на протяжении цикла падения. В комбинации с высокой степенью точности и контроля, обеспечиваемыми линейным электрическим двигателем, это означает, что двигатель может быть вновь присоединен сразу после соударения падающего груза с эластичными амортизаторами и его отскакивания, так что имеется возможность более быстрого возвращения к операции подъема и начала следующего цикла падения. Помимо возможности сокращения времени цикла падения, это может быть особенно полезно во время испытания, при котором последующие удары отскакивающего груза являются нежелательными, так как линейный электрический двигатель может подхватить упавший груз после первого удара.
Ниже приведено более подробное описание данного изобретения на основании предпочтительного варианта выполнения и со ссылкой на чертежи, на которых:
фиг. 1 изображает первый схематический вид в аксонометрии дефлектометра с падающим грузом согласно варианту выполнения,
фиг. 2 изображает второй схематический вид в аксонометрии дефлектометра с падающим грузом, показанного на фиг. 1,
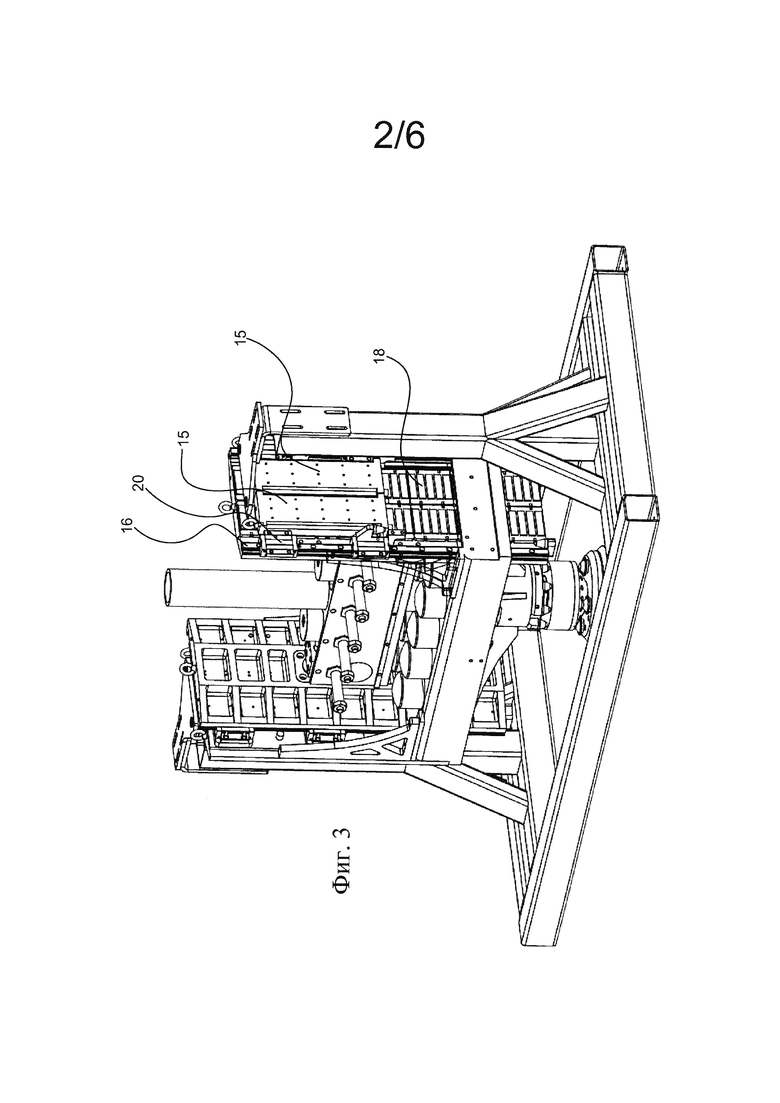
фиг. 3 изображает дополнительный схематический вид в аксонометрии дефлектометра с падающим грузом, показанного на фиг. 1, установленного на опорной раме,
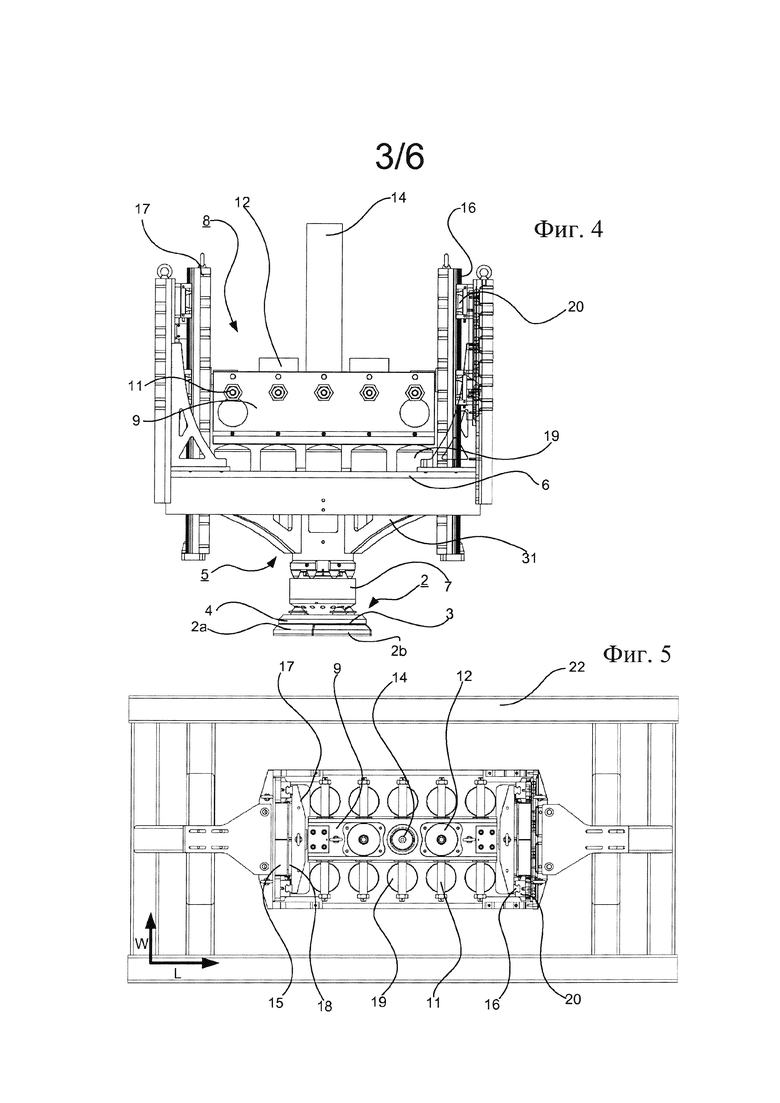
фиг. 4 изображает схематический вид сбоку дефлектометра с падающим грузом, показанного на фиг. 1,
фиг. 5 изображает схематический вид сверху дефлектометра с падающим грузом, показанного на фиг. 3, установленного на опорной раме,
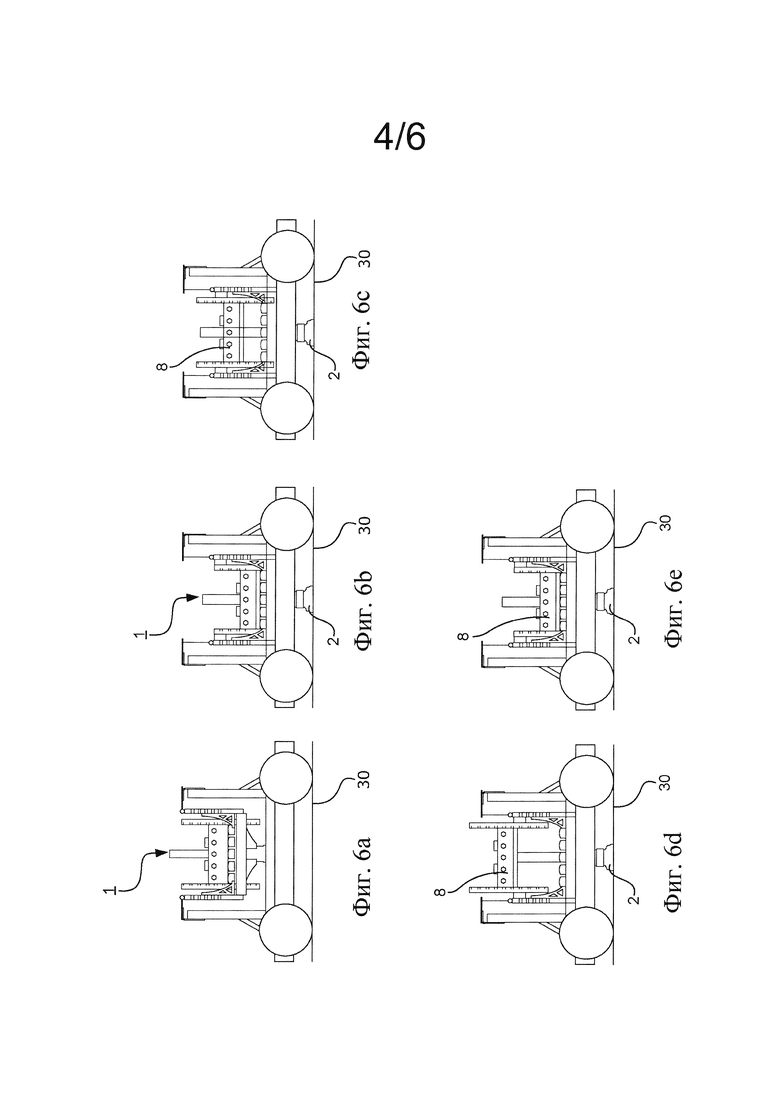
фиг. 6а-е схематически иллюстрируют опускание нагрузочной плиты ДПГ на поверхность и последующий подъем и падение падающего груза,
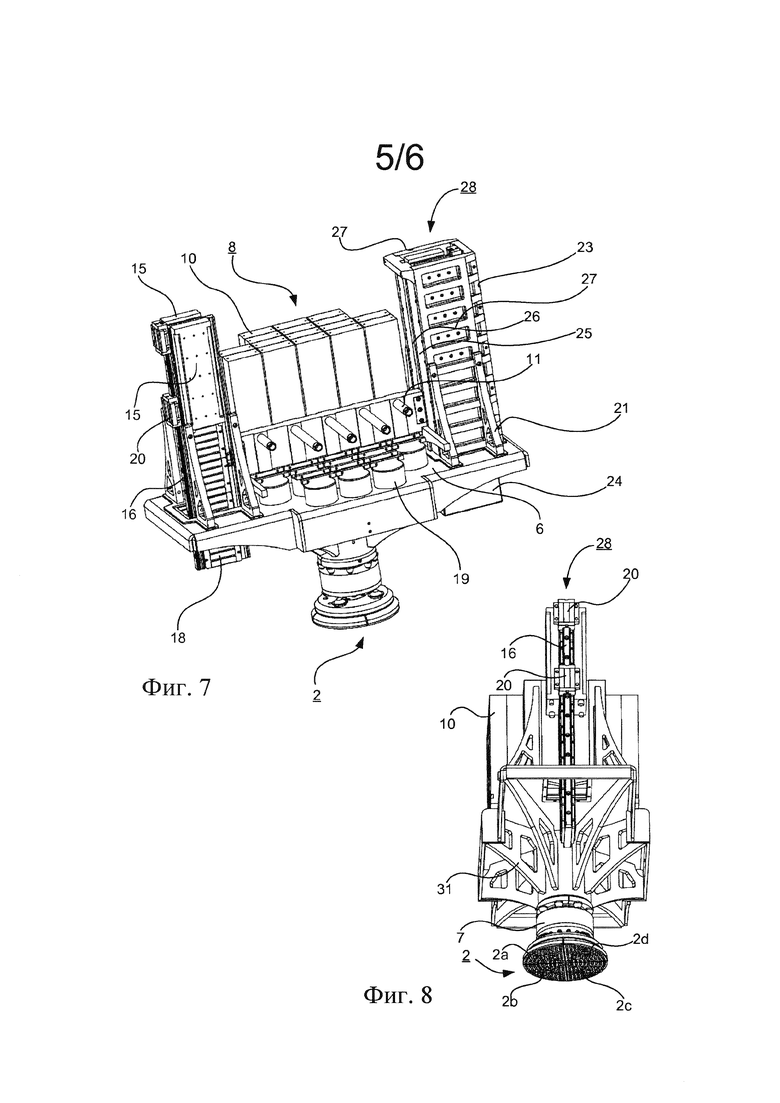
фиг. 7 изображает первый схематический вид в аксонометрии дефлектометра с падающим грузом согласно другому варианту выполнения изобретения,
фиг. 8 изображает второй схематический вид в аксонометрии дефлектометра с падающим грузом, показанного на фиг. 7, и
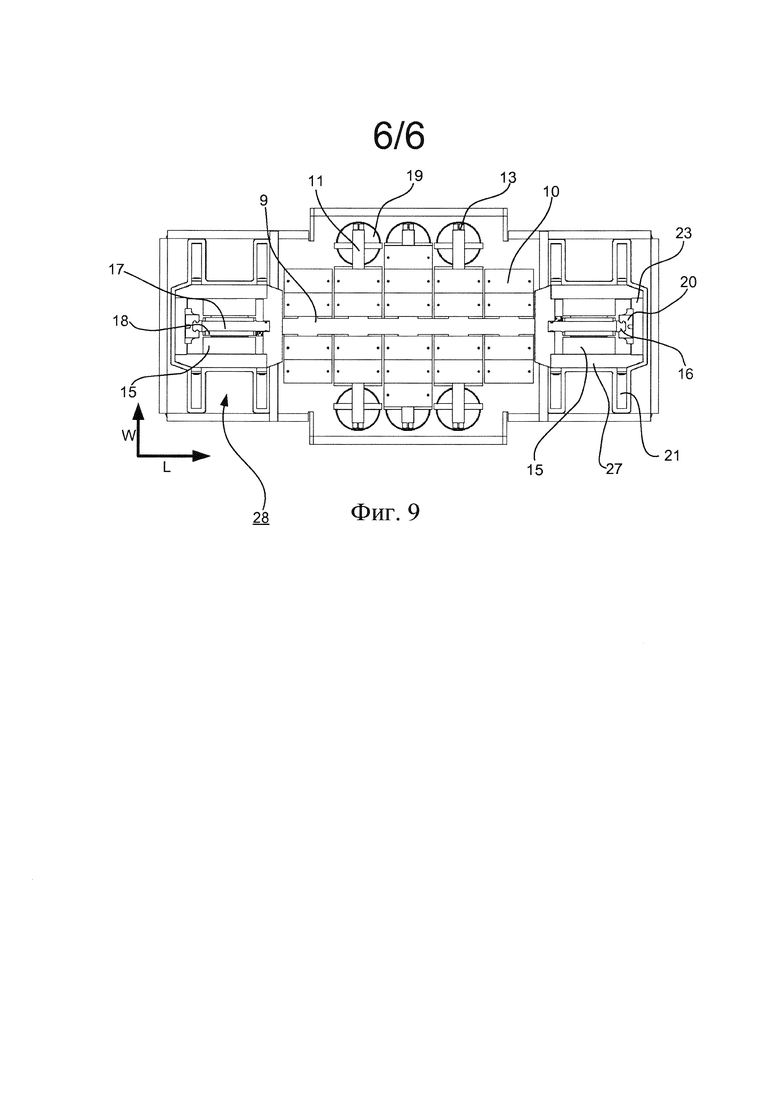
фиг. 9 изображает схематический вид сверху дефлектометра с падающим грузом, показанного на фиг. 7.
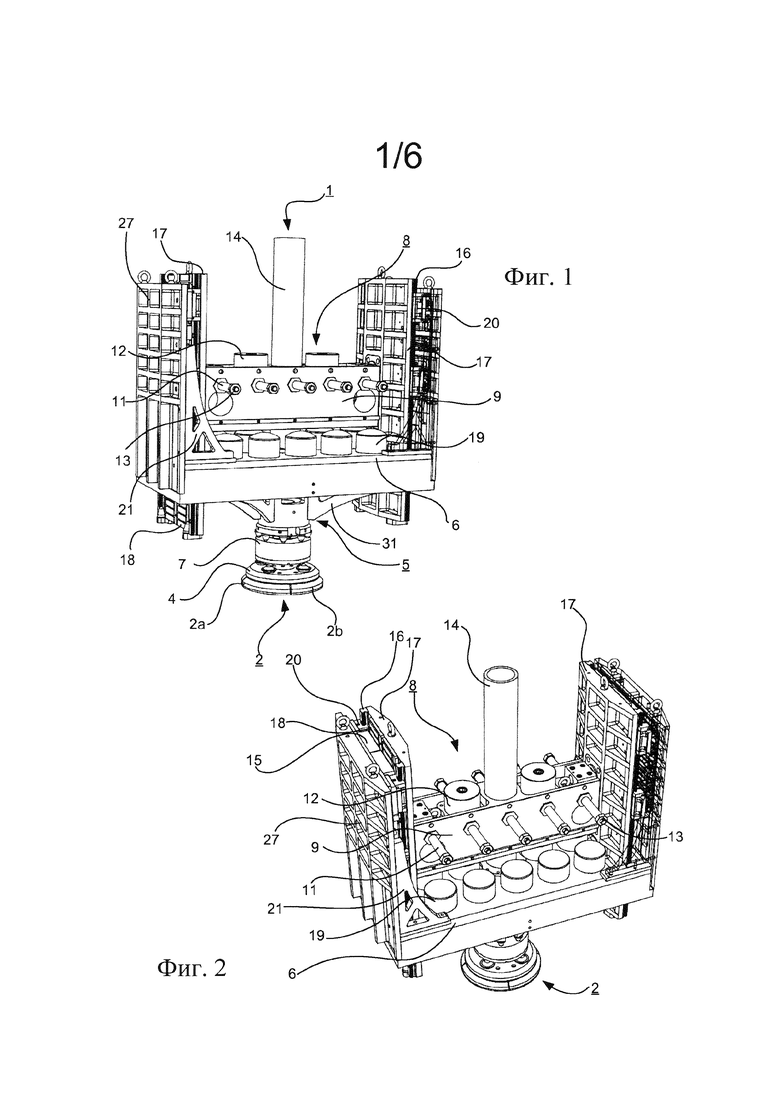
На фиг. 1 и 2 изображены виды в аксонометрии первого варианта выполнения подвижных частей дефлектометра 1 с падающим грузом, содержащего линейные электрические двигатели 15, согласно изобретению.
На всем протяжении описания, когда речь идет о направлениях, дефлектометр 1 описывается как имеющий продольное направление L с двумя концами и поперечное направление W с двумя боковыми сторонами, как показано на фиг. 5 и 9. Кроме того, направления вверх и вниз относятся к ориентации падающего груза дефлектометра 1 во время использования.
Что касается линейного электрического двигателя 15, он содержит как статор, который в целом является неподвижным, так и якорь, который в целом является подвижным. Данное условие соблюдается в нижеследующем описании. Кроме того, как будет ясно, под статором обычно понимается компонент, создающий управляемое магнитное поле, которое, в свою очередь, вызывает перемещение якоря.
Как можно видеть, дефлектометр 1 содержит падающий груз 8, выполненный с возможностью падения после подъема для создания требуемого удара. Груз 8 содержит удлиненную основную часть 9, которая проходит вдоль продольного направления. Основная часть 9 имеет нижнюю ударную поверхность, предназначенную для нанесения удара по плите 6, передающей нагрузку. На части 9 могут быть установлены два груза 12, или указанные два груза 12 могут быть сняты с части 9 для обеспечения минимального веса груза 8. Груз 8 также содержит набор брусьев 11, проходящих вбок наружу в поперечном направлении от основной части 9. Для получения общего веса, необходимого для проводимого испытания, на брусьях 11, проходящих в боковом направлении, могут быть установлены дополнительные съемные грузы 10 (не показаны на фиг. 1-6).
Вес каждого съемного груза 10 предпочтительно обеспечивает возможность ручного манипулирования, и падающий груз 8, таким образом, может содержать значительное количество съемных грузов 10, установленных друг за другом, обычно для получения общего веса груза 8, составляющего вплоть до примерно 750 кг. Установленные грузы 10 проходят вниз с обеспечением совмещения с нижней ударной поверхностью основной части 9, так что грузы 10 образуют часть ударной поверхности. Для закрепления съемных грузов 10 на основной части 9 на конце брусьев 11 могут быть выполнены гайки 13.
Между передающей нагрузку плитой 6 и падающим грузом 8 расположен набор эластичных амортизаторов 19. В изображенном варианте выполнения амортизаторы 19 установлены наверху плиты 6, однако специалисту должно быть понятно, что амортизаторы 19 могут быть установлены и на нижней части груза 8, т.е. под грузом 8. Эластичные амортизаторы 19 выполнены для смягчения удара и получения подходящего ударного усилия в форме синусоидальной полуволны, как указано выше.
Эластичные амортизаторы 19 предпочтительно расположены рядами в поперечном направлении плиты 6 так, что ряд амортизаторов 19 находится непосредственно под основной частью 9 и дополнительные ряды амортизаторов 19 находятся под брусьями 11, так что по указанным дополнительным рядам ударяют съемные грузы 10, расположенные на брусьях 11. При такой конфигурации количество используемых амортизаторов 19 зависит от количества съемных грузов 10, установленных на падающем грузе 8.
Эластичные амортизаторы 19 предпочтительно выполнены из резины и предпочтительно являются взаимозаменяемыми, что обеспечивает возможность изменения их количества, размеров, упругих свойств и т.д. в соответствии с заданным требуемым значением веса груза 8 и требуемой шириной импульса синусоидальной полуволны.
Кроме того, форма ударного импульса может быть необходимым образом изменена путем изменения веса падающего груза 8, высоты падения, амортизаторов 19, т.е. путем замены амортизаторов на другие амортизаторы, имеющие другую эластичность, и/или путем изменения количества амортизаторов 19, или использования двигателей 15, описанных ниже, для ускорения груза 8, т.е. для торможения или ускорения падения. При использовании одного из перечисленного или их комбинации ударный импульс может быть необходимым образом изменен для имитации конкретных типов нагрузок. Например, путем торможения падения с помощью линейного электрического двигателя 15 может быть достигнут более широкий ударный импульс с меньшим пиковым усилием для имитации более продолжительной нагрузки, действующей на испытуемую поверхность 30.
От передающей нагрузку плиты 6 сформированное ударное усилие передается к испытуемой поверхности 30 (показанной только на фиг. 6а-6е), такой как дорожное покрытие, например, из бетона на портланд-цементе или из асфальтобетона, при помощи средств передачи усилия, содержащих, среди прочего, опорную колонну 5 и нагрузочную плиту 2, предназначенную для взаимодействия с поверхностью 30. Плита 2 предпочтительно является круглой и, как видно из фиг. 1, может быть разделена на сегменты. В предпочтительном варианте выполнения имеется четыре сегмента 2а, 2b, 2с, 2d, только два из которых (сегменты 2а, 2b) хорошо видны на фиг. 1.
Очевидно, что может использоваться любое подходящее количество сегментов, в том числе один сегмент, т.е. одиночная круглая плита 2. Как лучше всего видно на фиг. 4, сегменты 2а, 2b плиты 2 соединены при помощи разделителей 3 с промежуточной плитой 4, что дает каждому сегменту 2а, 2b небольшую степень свободы для обеспечения возможности приспосабливания всей плиты 2 к неровностям поверхности 30, даже если поверхность 30 не является абсолютно плоской или горизонтальной. Промежуточная плита 4 и датчик 7 нагрузки, которые жестко соединены, предпочтительно также имеют некоторую степень свободы относительно опорной колонны 5 для приспосабливания к наклонным участкам поверхности 30.
Промежуточная плита 4 присоединена к передающей нагрузку плите 6 с помощью дополнительных опорных средств 31, образующих часть колонны 5. Дополнительные опорные средства также содержат датчик 7 усилия, такой как датчик нагрузки, предназначенный для измерения усилий, возникающих вследствие воздействия, оказываемого падающим грузом 8 на плиту 6 через эластичные амортизаторы 19.
В изображенном варианте выполнения груз 8 направляется вдоль центральной направляющей колонны 14, прикрепленной к плите 6, с направлением тем самым перемещений груза 8 вверх и вниз при его падении или подъеме.
Падающий груз 8 также содержит две вертикальные якорные монтажные плиты 17, т.е. по одной плите на каждом конце. Для создания якорей двигателей 15 груз 8 предпочтительно содержит два комплекта постоянных магнитов 18, расположенных на каждой плите 17, т.е. всего четыре комплекта. Эти комплекты постоянных магнитов 18, образующие якоря двигателей 15, расположены вертикальными рядами с чередованием полярностей. При такой конфигурации намагничиваемые катушки (не показаны), связанные со статорами двигателей 15, могут воздействовать непосредственно на падающий груз 8 без каких-либо подвижных частей, отличных от указанного груза 8. В частности, якорь на постоянных магнитах, расположенный на грузе 8, устраняет необходимость в каких-либо гибких электрических кабелях или проводах, протягиваемых к грузу 8.
Кроме того, указанные две вертикальные якорные монтажные плиты 17 снабжены парой направляющих рельсов 16. Направляющие рельсы 16 размещены в соответствующих линейных опорах в виде профилей 20 и направляются ими с обеспечением возможности взаимного возвратно-поступательного скольжения между падающим грузом 8 и остальной частью дефлектометра 1. Профили 20 установлены на соответствующих монтажных плитах 27 двигателей, на которых расположены статоры двигателей 15 и которые образуют часть стоек 28 двигателя. Монтажные плиты 27 поддерживаются передающей нагрузку плитой 6 и стабилизированы в целом треугольными опорными элементами 21, что обеспечивает упрочнение и поддержание положения каждой монтажной плиты 27 относительно плиты 6.
Предпочтительно поперечное сечение профилей 20 является дополняющим для поперечного сечения направляющих рельсов 16 и обеспечивает возможность удерживания рельсов 16 в профилях 20, например, с образованием пазового замка или аналогичного соединения с поднутрением. Беспрепятственное скольжение обеспечивается путем использования смазки, такой как технический жир, однако очевидно, что для обеспечения возможности беспрепятственного скользящего перемещения груза 8 могут быть предусмотрены другие средства, такие как шариковые подшипники. Помимо направления груза 8, взаимодействующие профили 20 и рельсы 16 обеспечивают поддержание воздушного зазора в ряде двигателей 15, используемых для подъема груза 8. Задние стороны двигателей 15 лучше всего видны на фиг. 3, на которой крышка двигателя удалена в целях иллюстрации.
Линейные электрические двигатели 15 предпочтительно представляют собой такие линейные двигатели, как двигатели LMA22-100, поставляемые фирмой ETEL S.A., Zone Industriellle, СН-2112 г. Мотье, Швейцария, и соответствующие контроллеры двигателей, производимые той же фирмой. Эти двигатели могут создавать максимальную силу в 3650 Ньютонов и потому способны без проблем поднимать и удерживать падающий груз 8 дефлектометра 1. Использование таких линейных электрических двигателей 15 позволяет сократить время подъема по сравнению с известными дефлектометрами с падающим грузом, приводимыми в действие роторными электрическими двигателями и шпинделем, которые, в свою очередь, уже являются гораздо более быстрыми, чем традиционные гидравлические подъемники. Времена подъема составляют значительно меньше 1 с для подъема на 400 мм, что фактически сравнимо с временем свободного падения, составляющим примерно 0,285 секунды для соответствующего падения с высоты 400 мм.
Для обеспечения высокой мобильности при практическом применении дефлектометр 1 установлен на подходящем шасси, таком как прицеп или транспортное средство, являющееся по существу известным и схематически изображенное на фиг. 6а-6f. Ср. также различные чертежи в вышеуказанной статье «Faildloddets historie», включенной в данный документе посредством ссылки. Потребление энергии дефлектометром с падающим грузом невелико, но оно может превышать возможности встроенного генератора буксирующего транспортного средства. Соответственно, электрическая мощность для приведения в действие двигателей 15 может быть предоставлена дополнительным генератором. Это может быть дополнительный генератор на транспортном средстве, на котором установлен дефлектометр 1 и/или с помощью которого он буксируется. Таким образом, когда дефлектометр 1 установлен на буксируемом прицепе, электрический генератор может быть размещен на указанном прицепе для обеспечения автономности.
Несмотря на то что это не показано на фиг. 1, 2, 4, 7, 8 и 9, дефлектометр 1 может быть установлен на раме для облегчения работы и транспортировки. Рама 22 может быть установлена на шасси с колесами, схематически изображенном на фиг. 6а-6е, таком как прицеп или самодвижущееся транспортное средство, или составлять его неотъемлемую часть.
На фиг. 3 изображен другой вид в аксонометрии дефлектометра 1, показанного на фиг.1 и 2, установленного на опорной раме 22, при этом крышка двигателя удалена в целях иллюстрации для отображения двигателей 15. В изображенном варианте выполнения дефлектометр 1 содержит в сумме четыре линейных электрических двигателя 15, по два с каждой стороны падающего груза 8. Очевидно, что, в зависимости от силы указанных двигателей 15 и ударного усилия, которое должен создавать дефлектометр 1, может использоваться любое подходящее количество двигателей 15.
Такая конфигурация, при которой возбуждаемые катушки двигателей 15 расположены на неподвижном корпусе дефлектометров 1, а якоря в виде постоянных магнитов 18 расположены на грузе 8, является преимущественным, поскольку груз 8 не зависит от какой бы то ни было проводки, которую необходимо было бы сгибать и которая была бы склонна к поломке.
На фиг. 6а-6е изображен дефлектометр 1, установленный на опорной раме, при этом для обеспечения мобильности при практическом применении дефлектометр 1 установлен на подходящем шасси, таком как прицеп или транспортное средство, так что он может быть легко перевезен на место проведения испытаний. После доставки к месту проведения испытаний дефлектометр 1 опускают, и нагрузочную плиту 2 вводят во взаимодействие с испытуемой поверхностью 30. Из состояния, показанного на фиг. 6b, груз 8 может быть поднят в положение для падения, изображенное на фиг. 6с-6d, т.е. на высоту, которая обеспечит создание требуемого ударного усилия, с помощью двигателя 15, воздействующего на постоянные магниты 18 груза 8, причем в указанном положении двигатели 15 отсоединены, т.е. обесточены, и выполняется падение. Для регулирования высоты подъема на грузе 8 могут быть расположены датчики линейных перемещений, например, соединенные с постоянными магнитами 18, для передачи данных о высоте подъема контроллеру двигателя.
Так как двигатели 15 находятся в постоянной магнитной связи с грузом 8, неизбежно будет существовать определенное тормозящее усилие, поскольку во время падения двигатели 15 действуют в качестве генераторов. Однако поскольку во время падения клеммы двигателей 15 обычно разомкнуты, индуцированная энергия не может быть рассеяна, и электрические потери практически отсутствуют. Как хорошо известно, напряжение на разомкнутых клеммах значительно увеличивается вследствие индуцированной обратной электродвижущей силы, и в некоторых случаях может возникнуть необходимость защиты управляющей электроники от таких чрезмерных напряжений. Соответственно, управляющая электроника содержит защитные средства для короткого замыкания клемм сопротивлением подходящей величины с обеспечением уменьшения напряжения. Однако это имеет место только в крайних случаях, и даже в этих случаях тормозящее усилие очень мало и им можно пренебречь, если для создания ударного усилия не используются очень малая высота падения и/или очень малый груз. В любом случае это может быть компенсировано небольшим возбуждением двигателей 15 во время падения для противодействия неотъемлемому торможению, обусловленному индукцией двигателей.
В этом отношении специалисту должно быть понятно, что электрические двигатели также могут быть подвергнуты активному возбуждению для поддержания падения или даже его ускорения до величин более 1G. То есть вместо простой компенсации почти отсутствующего торможения падающего груза 8 двигатели 15 также могут быть дополнительно возбуждены для обеспечения ускоренного падения груза 8 с повышенным ударным усилием. Однако это приведет к увеличенному расходу мощности и повышенной потребности в охлаждении двигателей 15 и контроллера. Тем не менее, дефлектометр 1 согласно данному изобретению в действительности не ограничен свободным падением. Вместо свободного падения может быть обеспечено направленное вниз ускорение, которое больше или меньше ускорения свободного падения. Одним вариантом применения этого может быть изменение формы ударного импульса, если вместо отключения двигателя 15 при падении груза 8, как предложено выше, двигатель 15 остается подключенным для контроля усилия во время удара. Все вышеописанные действия могут контролироваться электрическим образом и, следовательно, осуществляются автоматически без другого вмешательства вручную, например, нажатия нескольких кнопок.
Как станет понятно, назначение дефлектометра 1 с падающим грузом заключается в испытании поверхности дороги с покрытием, т.е. испытуемой поверхности 30. Для получения полезных данных силу удара по испытуемой поверхности 30 измеряют с помощью датчиков, таких как датчик 7 нагрузки, встроенный в дефлектометр 1, в частности в опорную колонну 5 дефлектометра 1. На заданных расстояниях от центра удара расположены дополнительные наружные датчики, такие как геофоны, акселерометры или аналогичные датчики для обнаружения прогибов. Для этого в дефлектометре 1 датчики, например, установлены на жесткой балке (не показана), которая может быть опущена с рамы дефлектометра 1 для вхождения в контакт с поверхностью, так что датчики могут регистрировать прогибы, вызванные известным ударным усилием по дорожному покрытию.
Датчики, используемые для сбора данных, могут, таким образом, содержать геофоны, акселерометры, лазеры, камеры или их комбинации. Полученные данные могут быть сохранены локально на встроенном жестком диске или могут быть переданы для удаленного хранения или обработки.
После удара линейный электрический двигатель 15 может быть повторно возбужден для возвращения к подъему груза 8 в положение падения для запуска следующего цикла падения. После того, как на месте испытаний выполнено достаточное количество циклов падения, дефлектометр 1 поднимают с испытуемой поверхности 30 и надежно закрепляют в положении транспортировки.
На фиг. 7 и 8 изображен другой, более компактный вариант выполнения дефлектометра 1 с падающим грузом согласно изобретению. В этом более компактном варианте выполнения дефлектометра 1 центральная направляющая колонна 14 отсутствует, что обеспечивает возможность выполнения основной части 9 груза 8 более тонкой и компактной. Это делает конструкцию в целом более легкой и обеспечивает возможность использования меньшего минимального веса падающего груза. С другой стороны, более узкая основная часть дает возможность выполнения брусьев 11, проходящих в боковом направлении, более длинными, что, в свою очередь, позволяет устанавливать дополнительные ряды съемных грузов 10. Благодаря этому падающий груз 8 может достичь большего максимального веса и, следовательно, увеличенного максимального ударного усилия. Возможность достижения уменьшенного минимального веса и увеличенного максимального веса повышает эксплуатационную гибкость дефлектометра 1, так как может быть достигнут более широкий диапазон величин ударных усилий. Как вариант, если в дополнительных рядах съемных грузов 10 нет необходимости, то дефлектометр 1 может быть специально выполнен с меньшей шириной, чтобы сделать его более компактным.
На фиг. 7 съемные грузы 10 удалены с одной стороны падающего груза 8 в целях иллюстрации. Во время работы съемные грузы 10 предпочтительно должны быть установлены на грузе 8 симметрично, например, как показано на фиг. 9, где установлена большая часть грузов 10, так чтобы линейные электрические двигатели 15 и направляющие рельсы 16 не испытывали воздействия какого бы то ни было крутящего момента, который со временем привел бы к повреждению дефлектометра 1.
На каждом из противоположных концов груза 8 расположена стойка 28 двигателя, в которой размещены двигатели 15. Стойки двигателей являются идентичными зеркальными отображениями друг друга. Каждая стойка 28 содержит две монтажные плиты 27 для установки двигателей 15, монтажную плиту 23 для направляющей, предназначенную для монтажа направляющих, и крышки 24, 25 для защиты внутреннего пространства стойки 28. На фиг.7 и 8 крышки 24, 25 и монтажные плиты 27, 23 сняты с одной из стоек 28 для отображения внутренней конструкции.
Каждая монтажная плита 27 двигателя проходит вертикально вверх от плиты 6, передающей нагрузку, и прикреплена к ней с помощью двух в целом треугольных опорных элементов 21, что обеспечивает упрочнение и поддержание положения каждой стойки 28 относительно плиты 6. Монтажные плиты 27 каждой стойки двигателя расположены параллельно продольному направлению и обращены друг к другу так, что они образуют две противоположные стороны стойки 28. Между ними проходит монтажная плита 23, которая образует торец стойки 28 и служит в качестве монтажного элемента для направляющих элементов 16, 20 груза 8.
Четвертая сторона каждой стойки 28, которая является стороной, обращенной к основной части 9, частично закрыта крышкой 25 с вертикальным пазом 26, проходящим по существу по всей высоте стойки 28 для обеспечения возможности прохождения груза 8 в стойку 28 и его свободного перемещения вдоль указанного паза во время подъема и падения груза 8.
Внутри каждой стойки 28 на монтажных плитах 27 установлена пара из двух линейных электрических двигателей 15, т.е. по одному линейному электрическому двигателю 15 на каждой плите 27. Пара двигателей 15 установлена так, что намагничиваемые катушки двигателей 15 ориентированы навстречу друг другу с образованием зазора, в котором могут быть размещены якоря для двигателей 15, расположенные между ними.
Двигатели 15 установлены на концах передающей нагрузку плиты 6, в частности, для обеспечения возможности прохождения длины рядов постоянных магнитов 18 как под указанной плитой, так и над ней. Прохождение над плитой, передающей нагрузку, не только увеличивает максимальную высоту падения груза 8, но также гарантирует постоянное перекрывание магнитами 18 якоря всех полюсов статора. При отсутствии полного перекрытия между магнитами якоря и полюсами статора поднимающее усилие уменьшается, и двигатель 15, возможно, не сможет поднять все необходимые грузы.
На обоих концах основная часть 9 груза 8 проходит через паз 26 в стойку 28, где она соединена с монтажным элементом 17 якоря. Монтажный элемент 17 проходит в стойке 28 вертикально через зазор между двигателями 15 и параллелен монтажным пластинам 27 двигателей. С обеих сторон элемента 17 расположен в виде вертикального ряда комплект магнитов 18 так, что каждый комплект магнитов 18 имеет открытую поверхность, обращенную к намагничиваемым катушкам статора двигателя 15, для обеспечения образования якоря для соответствующего двигателя 15, т.е. якоря расположены между двумя статорами так, что якоря могут перемещаться по вертикали внутри зазора между статорами.
Монтажный элемент 17 якоря и комплекты магнитов 18, установленные на нем, проходят вертикально вниз через отверстие в плите 6, так что комплекты магнитов 18 могут быть выполнены более длинными, т.е. в каждом ряду может быть установлено большее число магнитов, для достижения максимальной высоты падения. Вместо расположения комплектов магнитов 18 с прохождением через плиту 6, стойка 28 может быть сделана выше, так что двигатели 15 могут быть установлены на большей высоте, однако это потребует дополнительного упрочнения для поддержания стойки 28. Под плитой 6, вокруг каждого отверстия, через которое проходят монтажные элементы 17 и комплекты магнитов 18, расположена крышка 24 для закрытия якоря и защиты оператора дефлектометра 1 от подвижных частей во время работы.
Симметрия конструкции стойки двигателя является преимущественной, поскольку обеспечивает взаимное гашение горизонтальных усилий, действующих на два комплекта магнитов 18 со стороны соответствующих им двигателей 15. Это уменьшает механическую деформацию, испытываемую монтажными элементами 17, 27, 23 и направляющими 16, 20.
Как видно на фиг. 8 и 9, падающий груз 8 также содержит на каждом конце направляющий рельс 16. Это является дополнительным преимуществом симметрии стойки 28, так как один рельс 16 может поддерживать воздушный зазор для обоих двигателей 15. Рельсы 16 направляются парой профилей 20, установленных внутри стойки 28 на монтажной плите 23. Профили 20 в каждой паре профилей 20 разнесены в вертикальном направлении для обеспечения поддержания вертикального положения рельса 16 во время работы. Разумеется, профили 20 могут быть установлены на грузе 8, а рельс 16 - на стойке двигателя, что обеспечит достижение такого же направляющего эффекта.
Выше приведено описание данного изобретения на основании иллюстративных вариантов выполнения. Тем не менее, специалисту должно быть понятно, что возможны многочисленные другие варианты выполнения и модификации, а также варианты применения изобретения без отклонения от объема формулы изобретения. В частности, должно быть понятно, что конструкция средств передачи усилия, содержащих колонну 5 и промежуточную плиту 4, или конструкция нагрузочной плиты 2 могут отличаться от приведенных примеров. Кроме того, специалист найдет различные другие способы применения дефлектометра 1 с падающим грузом с точки зрения изменения формы ударного импульса и измерений, для которых он может использоваться.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДЕФЛЕКТОМЕТР С ПАДАЮЩИМ ГРУЗОМ | 2013 |
|
RU2656412C2 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ КОЛЕСА С ПОВЕРХНОСТЬЮ АЭРОДРОМНЫХ И ДОРОЖНЫХ ПОКРЫТИЙ | 2008 |
|
RU2369856C1 |
| СПОСОБ И УСТРОЙСТВО ОБЕСПЕЧЕНИЯ ЛОВЛИ РЫБ С ПОМОЩЬЮ РЫБОЛОВНОГО СУДНА | 2018 |
|
RU2761116C2 |
| ЛИФТ И УСТРОЙСТВО ВРЕМЕННОГО ОГРАНИЧЕНИЯ ХОДА КАБИНЫ ИЛИ ПРОТИВОВЕСА ДЛЯ ЛИФТА | 1998 |
|
RU2234450C2 |
| ПРУЖИННАЯ ПОДВЕСКА С РЕГУЛИРУЕМЫМ ДОРОЖНЫМ ПРОСВЕТОМ | 2019 |
|
RU2705604C1 |
| Стенд для испытания одноколейных транспортных средств | 1989 |
|
SU1672264A1 |
| УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКИХ ИСПЫТАНИЙ ДОРОЖНЫХ ОДЕЖД | 1997 |
|
RU2134738C1 |
| ПЛАВУЧЕЕ УСТРОЙСТВО ДЛЯ СБОРА РАЗЛИТОЙ ПО ВОДЕ НЕФТИ | 1992 |
|
RU2081967C1 |
| ПРИБОР ДЛЯ ОПРЕДЕЛЕНИЯ ПРОЧНОСТИ СЦЕПЛЕНИЯ КАМЕННОГО МАТЕРИАЛА С ВЯЖУЩИМ | 1992 |
|
RU2020482C1 |
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВКИ УЛОВА | 2011 |
|
RU2573533C2 |
Изобретение относится к испытательной технике и может быть использовано для оценки физических свойств конструкции дорожного покрытия. Устройство содержит нагрузочную плиту, предназначенную для взаимодействия с испытуемой поверхностью, средства передачи усилия, предназначенные для передачи усилия к нагрузочной плите, амортизирующие средства и падающий груз. Падающий груз предназначен для удара по средствам передачи усилия через амортизирующие средства с обеспечением создания усилия, передаваемого к нагрузочной плите через средства передачи усилия. Устройство также содержит по меньшей мере один линейный электрический двигатель для подъема падающего груза на заданную высоту над средствами передачи усилия. 4 з.п. ф-лы, 9 ил.
1. Дефлектометр с падающим грузом, содержащий:
нагрузочную плиту, предназначенную для взаимодействия с испытуемой поверхностью,
средства передачи усилия, предназначенные для передачи усилия к нагрузочной плите,
амортизирующие средства,
падающий груз, предназначенный для удара по указанным средствам передачи усилия через указанные амортизирующие средства с обеспечением создания усилия, передаваемого к нагрузочной плите через средства передачи усилия,
направляющие средства для направления падающего груза к средствам передачи усилия и
подъемные средства, содержащие по меньшей мере один электрический двигатель для подъема падающего груза на заданную высоту над средствами передачи усилия,
отличающийся тем, что указанный по меньшей мере один электрический двигатель представляет собой линейный двигатель.
2. Дефлектометр по п. 1, в котором указанный по меньшей мере один электрический двигатель содержит постоянные магниты.
3. Дефлектометр по п. 2, в котором постоянные магниты образуют часть падающего груза.
4. Дефлектометр по любому из предыдущих пунктов, в котором подъемные средства содержат четыре электрических двигателя.
5. Дефлектометр по любому из предыдущих пунктов, в котором падающий груз содержит по меньшей мере один датчик линейного перемещения.
| WO 2015051798 A1, 16.04.2015 | |||
| Вибрационный рабочий орган породопогрузочной машины непрерывного действия | 1960 |
|
SU142607A1 |
| СПОСОБ ВОЗБУЖДЕНИЯ СЕЙСМИЧЕСКИХ ВОЛН | 2012 |
|
RU2488848C1 |

