Настоящее изобретение относится к дефлектометру с падающим грузом.
Дефлектометр с падающим грузом (FWD) - устройство для испытаний неразрушающим способом, используемое инженерами-строителями для оценки физических свойств конструкции дорожного покрытия. Данные, полученные с помощью FWD, используются, в основном, для оценки несущей способности, inter alia, дорожных покрытий, содержащих слои из бетона на портландцементе (РСС) или асфальтобетон (АС). Они используются на дорогах, покрытиях взлетно-посадочных полос аэропортов и железнодорожных путях. Дефлектометр с падающим грузом обычно встроен в прицеп, который может быть отбуксирован к месту испытания другим транспортным средством, а также может быть встроен в само транспортное средство.
Дефлектометр с падающим грузом предназначен для придания поверхности дорожного покрытия импульса нагрузки, моделирующего нагрузку, производимую вращающимся колесом транспортного средства. Нагрузка воспроизводится в результате падения груза с большим весом на ряд резиновых амортизаторов. Результирующая сила передается дорожному покрытию посредством круглой нагрузочной плиты. Наверху нагрузочной плиты устанавливается тензодатчик или другой измерительный преобразователь нагрузки, который измеряет нагрузку, приложенную к поверхности дорожного покрытия. Вдоль балки, проходящей от центра нагрузочной плиты, в линейном направлении установлено несколько датчиков деформации, таких как геофоны, которые измеряют возникающую вследствие нагрузки результирующую деформацию поверхности дорожного покрытия на различных расстояниях от средней точки приложенной нагрузки. Данные FWD могут быть использованы для вычисления параметров, относящихся к жесткости, например, модуля упругости Юнга для слоев многослойной конструкции дорожных покрытий, таких как дорожные покрытия дорог или аэропортов, содержащих РСС или АС.
В FWD из уровня техники груз обычно гидравлически поднимается вдоль вертикальной направляющей штанги или колонны и удерживается на предопределенной высоте при помощи устройства захвата, пока производятся измерения и от оператора FWD не поступит команда на падение груза. В этом случае устройство захвата отпускает груз и он падает на средство передачи усилия, которое включают круглую нагрузочную плиту определенного диаметра, которая до падения груза была опущена для создания контакта с поверхностью дорожного покрытия в желаемом месте для проведения измерений. Между средством передачи усилия и грузом предусмотрено демпфирующее средство, например, амортизаторы в виде резиновых блоков, для передачи идеальной полусинусоидальной ударной силы к дорожному покрытию. Средство передачи усилия обычно содержит силоизмерительное устройство, предназначенное для измерения фактической ударной силы. Поскольку масса падающего груза достаточно велика, обычно в диапазоне от 50 до 750 кг, падающий груз обычно подбирается и поднимается к фиксируемому положению при помощи гидравлического подъемного механизма или чего-либо подобного. FWD из уровня техники, как указано выше, например, известны из документов JP-A-2007-205955 и DE-U-9305327. Примеры FWD из уровня техники также описаны в статье "Faldloddets historie", Bohn, Axel О., Asfalt, стр. 4-11, сентябрь 1989 г., ISSN 0004-4318, в которой описано развитие дефлектометров с падающим грузом с 1964 г. по 1989 г.
Одним существенным недостатком таких FWD из уровня техники является то, что измерительный цикл осуществляется относительно долго, в особенности, если последовательные измерения производятся в одном и том же месте. Главная причина этого в том, что гидравлическое подъемное средство относительно медленно осуществляет процесс опускания для подбора груза, подъем груза для захвата и отсоединение груза от гидравлического подъемного средства. Кроме того, после нескольких повторяющихся падений в одном месте нагрузочная плита должна быть поднята на необходимую для транспортировки высоту и надежно зафиксирована, а затем снова опущена на следующем месте проведения измерений. В уровне техники последнее является основной причиной значительной продолжительности циклов испытаний. Когда для проведения исследования вдоль дороги необходимо произвести тысячи последовательных измерений, суммарная длительность этих процессов уменьшает эффективность всего исследования.
На этом фоне целью настоящего изобретения является дефлектометр с падающим грузом, который позволяет проводить последовательные измерения за более короткие интервалы времени и тем самым увеличить скорость испытания и общую продуктивность измерений деформации дорожного покрытия.
Согласно первому аспекту настоящего изобретения эта цель достигается при помощи дефлектометра с падающим грузом, содержащего нагрузочную плиту, приспособленную для зацепления с испытуемой поверхностью, средство передачи усилия, приспособленное для передачи усилия к нагрузочной плите, амортизирующее средство, груз, приспособленный для оказания ударного воздействия на указанное средство передачи усилия посредством указанного амортизирующего средства для обеспечения передачи усилия к указанной нагрузочной плите посредством указанного средства передачи усилия, направляющее средство, предназначенное для направления указанного груза к указанному средству передачи усилия, и подъемное средство, предназначенное для подъема указанного груза на предустановленную высоту, находящуюся выше указанного средства передачи усилия, характеризующегося тем, что указанное подъемное средство содержит электродвигатель, приводящий в движение резьбовой шпиндель, находящийся в зацеплении с грузом.
При использовании резьбового шпинделя, находящегося в зацеплении с грузом, подъемный механизм объединен с падающим грузом, обеспечивая возможность подъема груза обратно к верхнему положению сразу после его падения, производящего удар. В частности, так как подъемный механизм объединен с падающим грузом, требуется отдельное действие для прикрепления его к подъемному механизму для того, чтобы снова поднять груз в верхнее положение. Кроме того, использование резьбового шпинделя обеспечивает возможность быстрого и эффективного перемещения нагрузочной плиты и средства передачи усилия в верхнее положение, предназначенное для транспортировки.
В частности, это случай, когда согласно предпочтительному варианту осуществления изобретения резьбовой шпиндель находится в постоянном зацеплении с грузом. В этом случае обратное движение, при котором груз отскакивает назад после удара благодаря амортизирующему средству и другим упругим элементам в общей системе, может легко быть продолжено при помощи управления двигателем соответствующим образом.
Согласно другому предпочтительному варианту осуществления изобретения резьбовой шпиндель находится в постоянном зацеплении с электродвигателем. В случае, когда резьбовой шпиндель находится в постоянном зацеплении и с грузом, и с электродвигателем, не нужно никаких сопрягающих муфт или чего-то подобного, и обратное движение может легко быть продолжено при помощи управления двигателем соответствующим образом. Даже если падение груза приводит к принудительному вращению электродвигателя и работе его в качестве генератора, опытным путем установлено, что это не препятствует падению груза, и что можно достичь достаточно сильного удара. Объединение всех трех элементов, т.е. электродвигателя, резьбового шпинделя и падающего груза в одну кинематическую цепь, по существу упрощает конструкцию дефлектометра с падающим грузом.
Согласно другому дополнительному предпочтительному варианту осуществления изобретения резьбовой шпиндель приводится в движение непосредственно электродвигателем. Современные двигатели с постоянными магнитами полностью способны передать достаточный вращающий момент прямо на шпиндель для подъема груза, даже если резьбовой шпиндель имеет большой угол подъема резьбы. Это дополнительно упрощает конструкцию дефлектометра с падающим грузом.
В этом отношении угол подъема резьбы согласно дополнительному предпочтительному варианту осуществления изобретения является настолько большим, что резьбовой шпиндель находится в зацеплении с грузом без самоторможения. Наличие большого угла подъема резьбы является предпочтительным, так как это позволяет падающему грузу падать почти свободно, т.е. с очень малым сопротивлением, создавая таким образом соответствующую силу удара. Таким образом, согласно еще одному предпочтительному варианту осуществления изобретения резьбовой шпиндель имеет угол подъема резьбы, превышающий 40°, предпочтительно превышающий 50°. Это позволяет грузу падать, не подвергаясь слишком большому влиянию потерь, вызванных вращением электродвигателя, работающего в этот момент как генератор. Электродвигатель был тщательно выбран для того, чтобы не генерировать слишком высокую противоэлектродвижущую силу, т.е. меньше 600 В для предотвращения повреждения управляющей электроники.
Согласно другому предпочтительному варианту осуществления изобретения система зацепления между резьбовым шпинделем и грузом выбирается из системы зацепления на основе ходовых винтов, роликовых ходовых винтов или шариковых ходовых винтов. Это обеспечивает низкую силу трения, и падение груза таким образом происходит даже с меньшей задержкой.
Согласно дополнительному предпочтительному варианту осуществления изобретения дефлектометр с падающим грузом дополнительно содержит контроллер двигателя для электродвигателя, причем указанный контроллер двигателя приспособлен для управления скоростью падения груза. Наличие контроллера двигателя, приспособленного для управления скоростью падения груза, дает возможность оказывать влияние на падение груза множеством преимущественных способов, что обеспечивает возможность, inter alia, лучшего управления ударами по сравнению с простым падением из уровня техники.
Согласно еще одному дополнительному предпочтительному варианту осуществления изобретения дефлектометр с падающим грузом дополнительно содержит контроллер двигателя для электродвигателя, причем указанный контроллер двигателя приспособлен для управления положением падающего груза. Наличие контроллера двигателя, приспособленного для управления положением падающего груза, дает возможность оказывать влияние на падение груза множеством преимущественных способов, что обеспечивает возможность, inter alia, лучшего управления ударами по сравнению с простым падением из уровня техники.
Согласно дополнительному предпочтительному варианту осуществления изобретения дефлектометр с падающим грузом содержит раму и средство для закрепления падающего относительно рамы груза. Закрепление падающего груза позволяет использовать резьбовой шпиндель для подъема и опускания средства передачи усилия, а конкретнее, опускания его для зацепления с испытуемой поверхностью и подъема его в положение, предназначенное для транспортировки, при помощи электродвигателя.
Настоящее изобретение будет теперь описано более подробно со ссылками на чертежи, на которых:
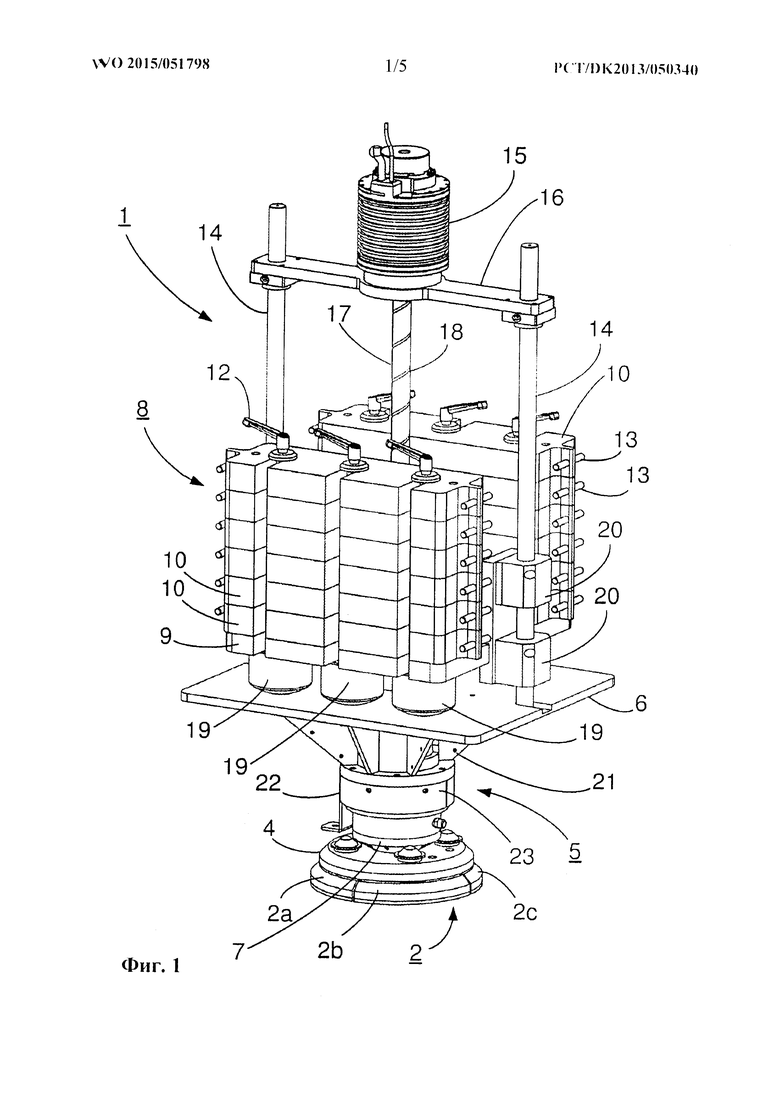
на фиг. 1 схематически показан вид в перспективе внутренних элементов дефлектометра с падающим грузом согласно настоящему изобретению,
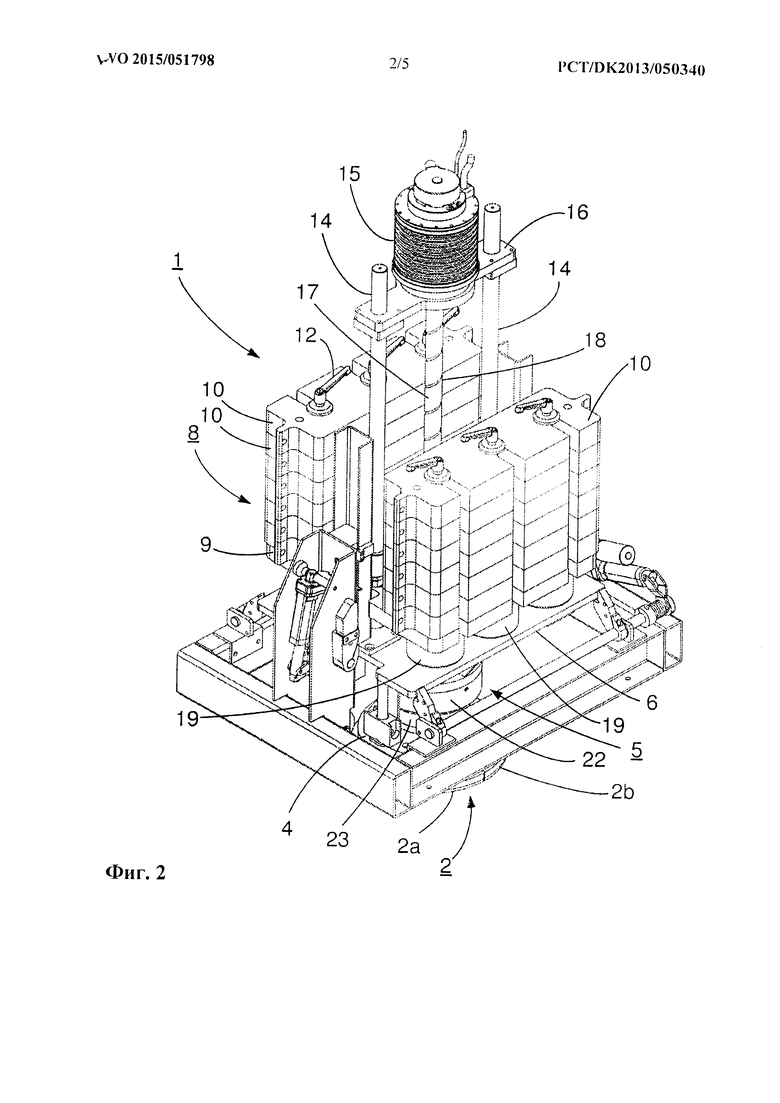
на фиг. 2 схематически показан вид в перспективе другого варианта осуществления дефлектометра с падающим грузом, содержащего элементы рамы,
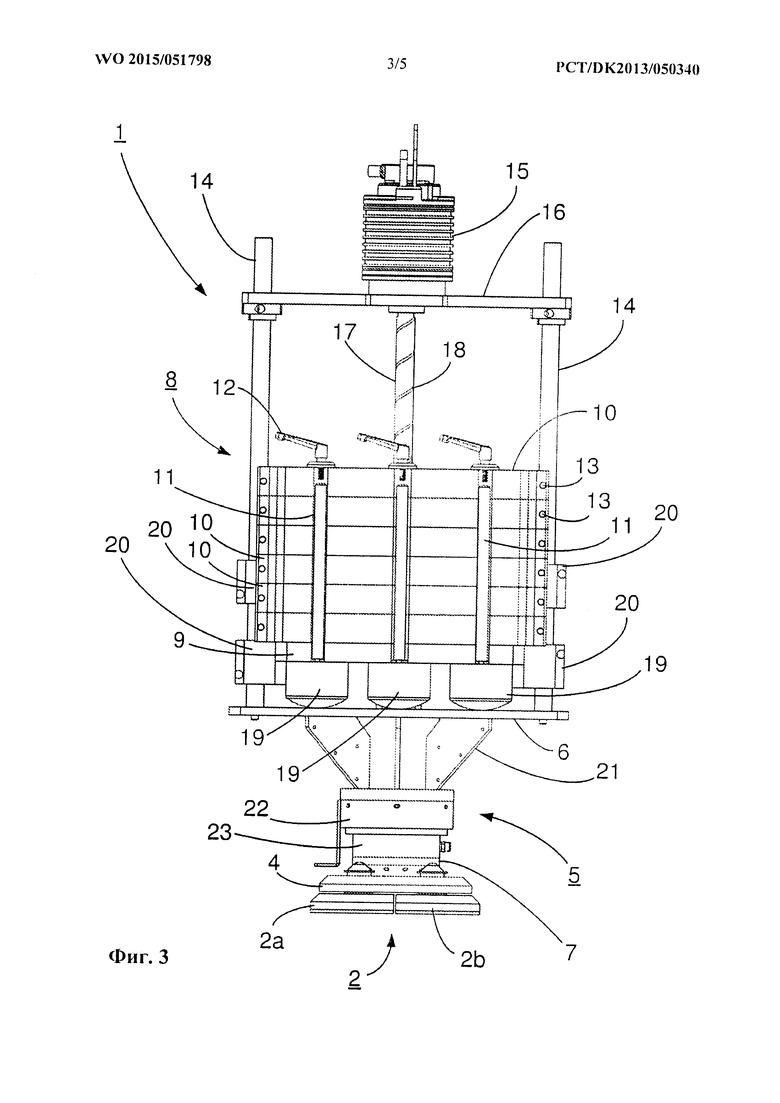
на фиг. 3 схематически показан вид в перспективе дефлектометра с падающим грузом, изображенного на фиг. 1,
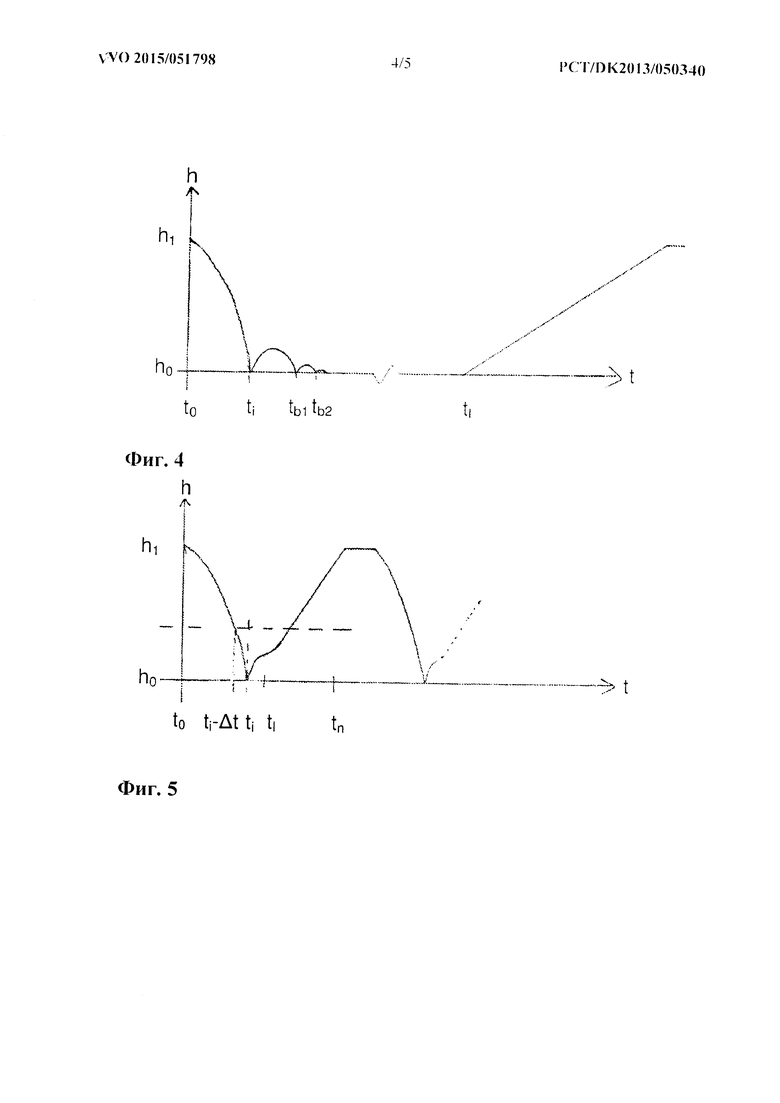
на фиг. 4 схематически изображена диаграмма зависимости высоты от времени для последовательности падений и подъема из уровня техники,
на фиг. 5 схематически изображена диаграмма зависимости высоты от времени для последовательности падений и подъема согласно настоящему изобретению, и
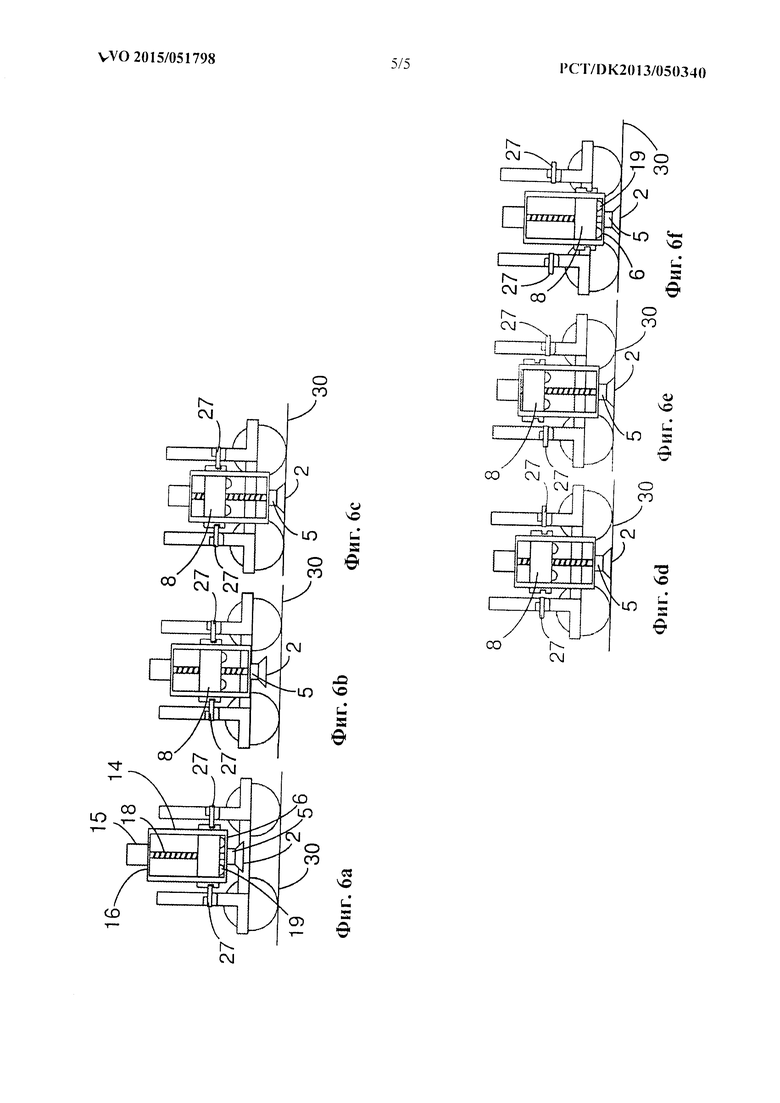
на фиг. 6а-6f схематически показано опускание нагрузочной плиты FWD на поверхность и последующее падение груза.
На фиг. 1 показан вид в перспективе внутренних элементов дефлектометра 1 с падающим грузом согласно настоящему изобретению. Для мобильности на практике дефлектометр 1 с падающим грузом установлен на соответствующей опоре, такой как прицеп или транспортное средство, per se известной и схематически показанной на фиг. 6а-6f. Ср. также с различными иллюстрациями в вышеупомянутой статье «Faldloddets historie», включенной в данный документ при помощи ссылки.
Дефлектометр 1 с падающим грузом содержит падающий груз 8, приспособленный для падения и удара по плите 6 передачи нагрузки, от которой удар передается на испытуемую поверхность 30 (показанную только на фиг. 6а-6f), такую как дорожное покрытие, например, бетон на портландцементе или асфальтобетон, посредством средства передачи усилия, содержащего, inter alia, опорную колонну 5 и нагрузочную плиту 2, приспособленную для зацепления с испытуемой поверхностью 30.
Нагрузочная плита 2 предпочтительно является круглой и, как можно увидеть из фиг. 1, может быть сегментированной. В предпочтительном варианте осуществления изобретения имеются четыре сегмента, из которых видны три сегмента 2а, 2b, 2с. Очевидно, что может быть использовано любое подходящее количество сегментов, включая один, например, целая нагрузочная плита 2. Как лучше видно на фиг. 3, сегменты 2а, 2b, 2с нагрузочной плиты 2 соединены посредством прокладок 3 с промежуточной плитой 4, позволяя каждому из сегментов 2а, 2b, 2с иметь небольшую степень свободы, для того чтобы позволить всей нагрузочной плите 2 приспосабливаться к неровностям испытуемой поверхности 30, даже если испытуемая поверхность 30 не полностью плоская или горизонтальная. Промежуточная плита 4 предпочтительно также имеет несколько степеней свободы относительно опорной колонны 5, для того чтобы приспосабливаться к наклонам испытуемой поверхности 30.
Промежуточная плита 4 соединена с плитой 6 передачи нагрузки посредством дополнительных опорных средств 21, 22, 23, образуя часть опорной колонны 5. Дополнительные опорные средства также включают динамометрический датчик 7, такой как тензодатчик, приспособленный для измерения силы удара падающего груза 8 на плиту 6 передачи нагрузки.
Падающий груз 8 включает опорную плиту 9, на которой может быть расположено несколько отдельных съемных грузов 10 для того, чтобы достичь желаемой величины веса для проводимого испытания. Вес каждого из съемных грузов 10 предпочтительно приспособлен для ручного манипулирования, и падающий груз 8 может, соответственно, содержать значительное количество съемных грузов 10, расположенных друг на друге. Для того чтобы надежно закрепить наборы съемных грузов 10, расположенных поверх опорной плиты 9, также предусмотрены закрепляющие средства 11, 12. Для ручного манипулирования съемные грузы 10 предпочтительно снабжены ручками 13 для переноски.
Под опорной плитой 9 предусмотрено некоторое количество упругих амортизаторов 19 для амортизации ударов и получения удара соответствующей полуволны синусоидальной формы. Упругие амортизаторы 19 предпочтительно являются взаимозаменяемыми, позволяя варьировать их количество, их размер, упругие свойства и т.п. в соответствии с заданной желаемой величиной веса падающего груза 8 и длительностью импульса полуволны синусоидальной формы.
По две стороны опорной плиты 9 предусмотрены линейные подшипники 20, включающие, например, шарикоподшипники, для того чтобы позволить опорной плите 9 плавно скользить, при перемещении груза 10 вдоль двух вертикальных колонн 14, прикрепленных к плите 6 передачи нагрузки, направляя таким образом вверх и вниз движения падающего груза 8, когда он падает или поднимается.
Что касается подъема, в настоящем изобретении используется электродвигатель 15, установленный на горизонтальной поперечной балке 16, размещенной на верхних концах двух вертикальных колонн 14. Электродвигатель 15 предпочтительно соединен непосредственно с резьбовым шпинделем 17. Резьбовой шпиндель 17, в свою очередь, находится в постоянном зацеплении с соответствующими средствами, расположенными в опорной плите 9. Таким соответствующим средством, приспособленным для обеспечения низкой силы трения, может быть, например, система зацепления на основе ходовых винтов, роликовых ходовых винтов или шариковых ходовых винтов. Низкая сила трения имеет важное значение, так как зацепление между резьбовым шпинделем 17 и опорной плитой 9 не должно быть самотормозящим. По той же причине шаг резьбы 18 шпинделя 17 является большим, имеющий, например, угол подъема резьбы превышает 40°, предпочтительно превышает 50°.
Наличие такого большого шага и низкой силы трения позволяет падающему грузу 8 падать почти свободно. Очевидно, что будет существовать сила трения и некоторый эффект торможения от вращения электродвигателя 15, но ими можно или пренебречь, или компенсировать их путем подачи на электродвигатель 15 тока величиной, достаточной для противодействия эффекту торможения.
И наоборот, шаг резьбы 18 резьбового шпинделя 17 не должен быть таким большим, что максимальный крутящий момент, который может обеспечить электродвигатель 15, будет недостаточным для подъема падающего груза 8.
Предпочтительный двигатель предпочтительно представляет собой моментный двигатель с постоянным магнитом, такой как моментный двигатель ETEL TMB, который можно заказать в ETEL S.A., Zone Industrielle, СН - 2112, Мотье, Швейцария. Такие двигатели развивают очень высокий крутящий момент, который, в свою очередь, позволяет использовать прямой привод шпинделя с очень большим шагом. Кроме того, такие двигатели обеспечивают прекрасное позиционное управление шпинделем 17, в свою очередь, позволяя очень точно управлять ударом, например, при использовании автоматизированного контроллера, причем автоматизированные контроллеры обычно обеспечивают как режим управления крутящим моментом, так и режим управления положением. Очевидно, что электродвигатель 15, обеспечивающий более низкий крутящий момент, мог бы использоваться в соединении с передаточным механизмом, но для сохранения минимального количества подвижных элементов и простоты механизма предпочтителен прямой привод.
При таком устройстве привода выполнение измерений становится более быстрым, потому что последовательность ударов в одном и том же месте может производиться быстрее.
На фиг. 4 изображена диаграмма последовательности падений у дефлектометра с падающим грузом из уровня техники. Для легкого сравнения с фиг. 5, расположенной ниже, последовательность начинается с падающего груза, поднятого и удерживаемого на предопределенной высоте h1, с которой падает падающий груз, например, 40 см для падающего груза весом 750 кг. При отпускании падающего груза он перейдет в фактически свободное падение, ударит плиту передачи нагрузки и сдавит упругие амортизаторы на высоте h0 в момент удара ti. Благодаря свойствам упругости, в основном амортизаторов, падающий груз отскочит назад и повторно ударит плиту передачи нагрузки в момент времени tb1, tb2 и т.д., пока не прекратит движение на плите передачи нагрузки. После прекращения движения падающий груз снова вручную прикрепляется к подъемному средству, и в момент времени tl процесс гидравлического подъема можно начинать заново. Необходимо заметить, что фиг.4 является схематической и расстояние между tb2 и tl фактически составляет несколько секунд по сравнению с приблизительно 0,285 с, в течение которых происходит свободное падение с высоты 40 см.
На фиг. 5 изображено падение согласно настоящему изобретению на диаграмме, подобной диаграмме на фиг. 4. Падающий груз 8, падающий с предопределенной высоты h1, переходит в фактически свободное падение и ударяет плиту 6 передачи нагрузки в момент времени ti. Поскольку свободное падение соответствует такому же, как и в FWD из уровня техники, падение изображается с помощью схожих во времени парабол в отличие от диаграмм подъема на фиг. 4 и фиг. 5. По сравнению с уровнем техники это свободное падение, тем не менее, не является полностью свободным, потому что опорная плита 9 падающего груза 8 находится в постоянном зацеплении с резьбовым шпинделем 17. Следовательно, во время падения падающий груз 8 будет неминуемо вращать электродвигатель 15, который даже с отключенными контактами электропитания будет стремиться затормозить падение, т.е., обеспечивает сопротивление вращению шпинделя, вызванному падением падающего груза 8. Это может быть компенсировано путем подачи на двигатель тока, достаточного для запуска двигателя 15 и резьбового шпинделя 17 в соответствии со свободным падением. Это можно довольно легко осуществить благодаря возможности точного управления позиционированием или крутящим моментом двигателя. Теоретическое положение падающего груза 8 в свободном падении легко вычисляется и преобразуется в соответствующие положения резьбового шпинделя 17 и, в свою очередь, двигателя 15. Для получения действительно свободного падения очевидно также можно было бы встроить механизм захвата между падающим грузом 8 и двигателем 15, но для подъема предпочтительно иметь постоянное зацепление. В качестве альтернативы может быть установлен двигатель, обеспечивающий нулевой крутящий момент.
Однако, для того чтобы избежать любого влияния контроллера двигателя на удар, контроллер двигателя предпочтительно отключается на предопределенной высоте h2 перед ударом, т.е. в момент времени ti-Δt, для того чтобы двигатель по существу имел отключенные контакты электропитания. Это короткое время Δt, во время которого отсутствует противодействие торможению, может не приниматься в расчет при ударе. В любом случае, фактическая сила удара измеряется при помощи динамометрического датчика 7.
После удара падающий груз 8 отскакивает назад благодаря, inter alia, свойствам упругости амортизаторов 19. Поскольку резьбовой шпиндель 17 находится в постоянном зацеплении с опорной плитой 9 падающего груза 8, нет необходимости ждать, пока падающий груз 8 остановится на плите 6 передачи нагрузки для того, чтобы заново прикрепить его к подъемному средству. Вместо этого все, что нужно для подъема падающего груза 8 обратно на высоту падения h1, это подать питание на электродвигатель 15 в определенный момент времени подъема tl, например, во время первого отскока падающего груза 8. Продолжительность подъема очень коротка, и за несколько секунд к моменту времени tn падающий груз 8 возвратится на высоту h1 для осуществления следующего падения. Это происходит задолго до следующего падения, которое может осуществить гидравлический подъемный механизм из уровня техники.
На фиг. 2 изображен дефлектометр с падающим грузом согласно настоящему изобретению, установленный на раме 24. Несмотря на то, что это не изображено на фиг.2, рама может быть установлена на средстве перевозки на колесах 25 или образовывать его составную часть, как схематически показано на фиг. 6а-6f, таком как прицеп или самоходное транспортное средство. Средство 24 перевозки снабжено первым закрепляющим средством 26 и вторым закрепляющим средством 27. Первое закрепляющее средство 26 содержит рычаг, который может по меньшей мере частично совершать колебательные движения до уровня ниже плиты 6 передачи нагрузки, обеспечивая возможность закрепления плиты 6 передачи нагрузки на нем и, следовательно, на раме, под своим собственным весом. Колебательное движение предпочтительно выполняется посредством электропривода 28, приводящего в движение общий вал 29, на котором установлены эти рычаги. Как может быть видно из фиг. 2, первое закрепляющее средство 26 предпочтительно содержит два вала 28, каждый из которых является общим для пары рычагов, для поддержки плиты 6 передачи нагрузки в четырех углах. Эти приводы необязательно должны быть электрическими, а могут быть гидравлическими или приводиться в движение другими подходящими средствами. Вместо просто поддержки веса плиты 8 передачи нагрузки закрепляющее средство 26 также может, конечно, находиться в зацеплении с нагрузочной плитой 6 путем фиксации.
Второе закрепляющее средство 27 подобным образом приспособлено совершать колебательное движение до уровня ниже опорной плиты 9 падающего груза 8. Также в этом случае один или несколько рычагов совершают колебательные движения посредством электропривода, вращающего вал, к которому эти рычаги прикреплены. Также предпочтительно предусмотрена двойная система для второго закрепляющего средства, для обеспечения зацепления и закрепления любой из сторон падающего груза, как схематически показано на фиг. 6а-6с. Так же как показано на фиг. 6а-6с, второе закрепляющее средство 27 может находиться в зацеплении с падающим грузом 8 при помощи фиксации, а не только поддерживать груз.
Как будет далее описано, применение второго закрепляющего средства 27 позволяет использовать электродвигатель 15 и резьбовой шпиндель 17 для быстрого введения опорной колонны 5 с нагрузочной плитой 2 в зацепление с испытуемой поверхностью 30 и, по завершении ряда измерений на одном месте, быстрого перемещения опорной колонны 5 назад в безопасное положение хранения для транспортировки к следующему месту испытаний. Обычно расстояние транспортировки к следующему месту очень короткое, и каждый раз экономия времени при транспортировке между местами по существу будет приводить к экономии общего времени, необходимого для проведения испытаний данного растяжения дорожного покрытия.
На фиг. 6а изображен дефлектометр 1 с падающим грузом в положении, при котором падающий груз 8 закреплен при помощи второго закрепляющего средства 27. Колонна 5 поднята и не находится в соприкосновении с испытуемой поверхностью 30, и нагрузочная плита соприкасается с амортизаторами 19 падающего груза 8. Если на электродвигатель 15 подано подходящее напряжение, то он может удерживать шпиндель в фиксированном положении и, соответственно, поддерживать вес нагрузочной плиты 6 и опорной колонны 5. В этом состоянии первое закрепляющее средство 26 можно отцепить. После отцепления первого закрепляющего средства 26, но с все еще закрепленным падающим грузом 8, опорная колонна 5 образует со шпинделем 17 подвижную винтовую пару и поэтому может перемещаться вверх и вниз при вращении шпинделя. Путем соответствующей подачи электропитания на электродвигатель 15 опорная колонна 5 легко может быть опущена до соприкосновения с испытуемой поверхностью 30, как показано на фиг. 6b и 6с.
После зацепления с испытуемой поверхностью 30, опорная колонна 5 прочно опирается на нее. В этом состоянии, как показано на фиг. 6d, второе закрепляющее средство 25 может быть отцеплено от падающего груза, падающий груз 8 теперь может удерживаться путем подачи соответствующего электропитания на электродвигатель 15. В таком случае предпочтительным становится автоматизированный контроллер. Такой автоматизированный контроллер поддерживает как режим изменения положения, так и режим изменения крутящего момента для управления двигателем. Во время подъема и удержания падающего груза 8 будет использоваться режим изменения положения, тогда как во время выполнения последовательности падений будет использоваться режим изменения крутящего момента.
Исходя из состояния, изображенного на фиг. 6d, падающий груз 8 при вращении шпинделя 17 электродвигателем 15 может быть поднят к положению для совершения падения, показанному на фиг. 6е, т.е. на высоту h1, как поясняется в сочетании с фиг. 5. После этого выполняется падение, и падающий груз ударяет нагрузочную плиту 6, как показано на фиг. 6f и как поясняется выше в сочетании с фиг. 5. После того как было произведено соответствующее количество ударов в одном месте, можно выполнить обратный процесс, т.е. расположить падающий груз 8 на высоте, показанной на фиг. 6d, где он может быть закреплен, как показано на фиг. 6с. Снова представляя собой подвижную винтовую пару, опорная колонна может быть поднята с испытуемой поверхности 30 и закреплена в положении, предназначенном для транспортировки. Все описанное выше может управляться при помощи электроники и поэтому выполняться автоматически без вмешательства оператора, как, например, нажатия нескольких кнопок. И опускание, и подъем опорной колонны 5 может выполняться очень быстро, например, в диапазоне от  до 2 с, что является существенным достижением по сравнению со временем установки в уровне техники. Помимо возможности производить удары в быстрой последовательности настоящее изобретение предоставляет дополнительные преимущества. Так как моментный двигатель с соответствующим управлением имеет очень хорошее положение вдобавок к высокому крутящему моменту, который он может создавать, он может предоставить гораздо больше, чем просто подъем. По существу он может перемещать падающий груз 8 в любое желаемое положение между h0 и h1 посредством управляемого ускорения и торможения и удерживать его в этом желаемом положении. Это значит, что в отличие от дефлектометров с падающим грузом из уровня техники, дефлектометр с падающим грузом согласно настоящему изобретению фактически не ограничен свободным падением. Вместо обычного ускорения свободного падения может быть обеспечено более высокое или низкое ускорение свободного падения.
до 2 с, что является существенным достижением по сравнению со временем установки в уровне техники. Помимо возможности производить удары в быстрой последовательности настоящее изобретение предоставляет дополнительные преимущества. Так как моментный двигатель с соответствующим управлением имеет очень хорошее положение вдобавок к высокому крутящему моменту, который он может создавать, он может предоставить гораздо больше, чем просто подъем. По существу он может перемещать падающий груз 8 в любое желаемое положение между h0 и h1 посредством управляемого ускорения и торможения и удерживать его в этом желаемом положении. Это значит, что в отличие от дефлектометров с падающим грузом из уровня техники, дефлектометр с падающим грузом согласно настоящему изобретению фактически не ограничен свободным падением. Вместо обычного ускорения свободного падения может быть обеспечено более высокое или низкое ускорение свободного падения.
Одним из применений может быть регулирование силы удара, если вместо того, чтобы блокировать контроллер двигателя непосредственно перед ударом, как предлагается выше, контроллер двигателя останется в зацеплении, то управление положением позволит контроллеру двигателя управлять усилием во время удара. Следовательно, могут быть обеспечены удары с желаемыми характеристиками силы удара полусинусоидальной формы, например, вплоть до 10 с. Другим применением может быть устранение нагрузки средства перевозки FWD на грунт в момент удара. Если в последних примерах перед ударом ускорение падающего груза 8 превышает ускорение свободного падения, то инерция оторвет средство перевозки от грунта, позволяя таким образом избежать влияния веса опоры на проводимые измерения.
Настоящее изобретение было описано на основе примерных вариантов осуществления изобретения. Однако специалисту будет понятно, что многочисленные другие варианты осуществления изобретения, а также и области применения настоящего изобретения не должны выходить за рамки формулы изобретения. В частности, ему будет понятно, что конструкция средства передачи усилия, включая колонну 5 и промежуточную плиту 4, или нагрузочную плиту 2, может отличаться от этих примеров. Кроме того, специалисту будет понятно, что могут быть использованы многочисленные другие способы применения дефлектометра с падающим грузом с точки зрения регулирования силы удара и осуществления измерений, для которых он может использоваться.
| название | год | авторы | номер документа |
|---|---|---|---|
| Дефлектометр с падающим грузом | 2015 |
|
RU2712936C2 |
| УСТАНОВКА ДЛЯ ИСПЫТАНИЯ МАТЕРИАЛОВ НА УДАРНО-АБРАЗИВНОЕ ИЗНАШИВАНИЕ | 2023 |
|
RU2806193C1 |
| СИСТЕМА БЛОКИРОВКИ ФРЕЗЕРНОГО БАРАБАНА ДОРОЖНОЙ ФРЕЗЕРНОЙ МАШИНЫ | 2018 |
|
RU2695210C1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ ПОДЪЕМНОГО УСТРОЙСТВА И ПОДЪЕМНАЯ СИСТЕМА | 2007 |
|
RU2429185C2 |
| СПОСОБ ЭЛЕКТРИЧЕСКОГО УПРАВЛЕНИЯ ПОДЪЕМНЫМ КРАНОМ С МНОЖЕСТВОМ ТОЧЕК ПОДВЕСА | 2007 |
|
RU2445250C2 |
| Подъемное устройство | 2013 |
|
RU2638407C2 |
| УСТРОЙСТВО ДЛЯ УДЕРЖАНИЯ И СБРОСА ОБЪЕКТА | 2012 |
|
RU2517794C1 |
| УСТАНОВКА ДЛЯ ИСПЫТАНИЯ МАТЕРИАЛОВ НА ИЗНАШИВАНИЕ АБРАЗИВНОЙ МАССОЙ В УСЛОВИЯХ УДАРА С ТРЕНИЕМ | 2024 |
|
RU2826198C1 |
| Мобильное устройство для монтажа и демонтажа вагонных дверей | 2022 |
|
RU2791355C1 |
| ПРУЖИННАЯ ПОДВЕСКА С РЕГУЛИРУЕМЫМ ДОРОЖНЫМ ПРОСВЕТОМ | 2019 |
|
RU2705604C1 |
Изобретение относится к испытательной технике и может быть использовано для оценки физических свойств конструкции дорожного покрытия. Устройство содержит нагрузочную плиту, приспособленную для удара об испытуемую поверхность, средство передачи усилия, приспособленное для передачи усилия к нагрузочной плите, амортизирующее средство и груз, приспособленный для удара указанного средства передачи усилия посредством указанного амортизирующего средства. Для того чтобы усилие передавалось к указанной нагрузочной плите посредством указанного средства передачи усилия, используется направляющее средство, предназначенное для направления указанного груза к указанному средству передачи усилия, и подъемное средство, предназначенное для подъема указанного груза на предустановленную высоту, находящуюся выше указанного средства передачи усилия. При этом подъемное средство содержит электродвигатель, приводящий в движение резьбовой шпиндель, находящийся в зацеплении с падающим грузом, причем резьбовой шпиндель находится в зацеплении без самоторможения с падающим грузом. Технический результат заключается в возможности проводить последовательные измерения за более короткие интервалы времени и тем самым увеличить скорость испытания и общую продуктивность измерений деформации дорожного покрытия. 8 з.п. ф-лы, 6 ил.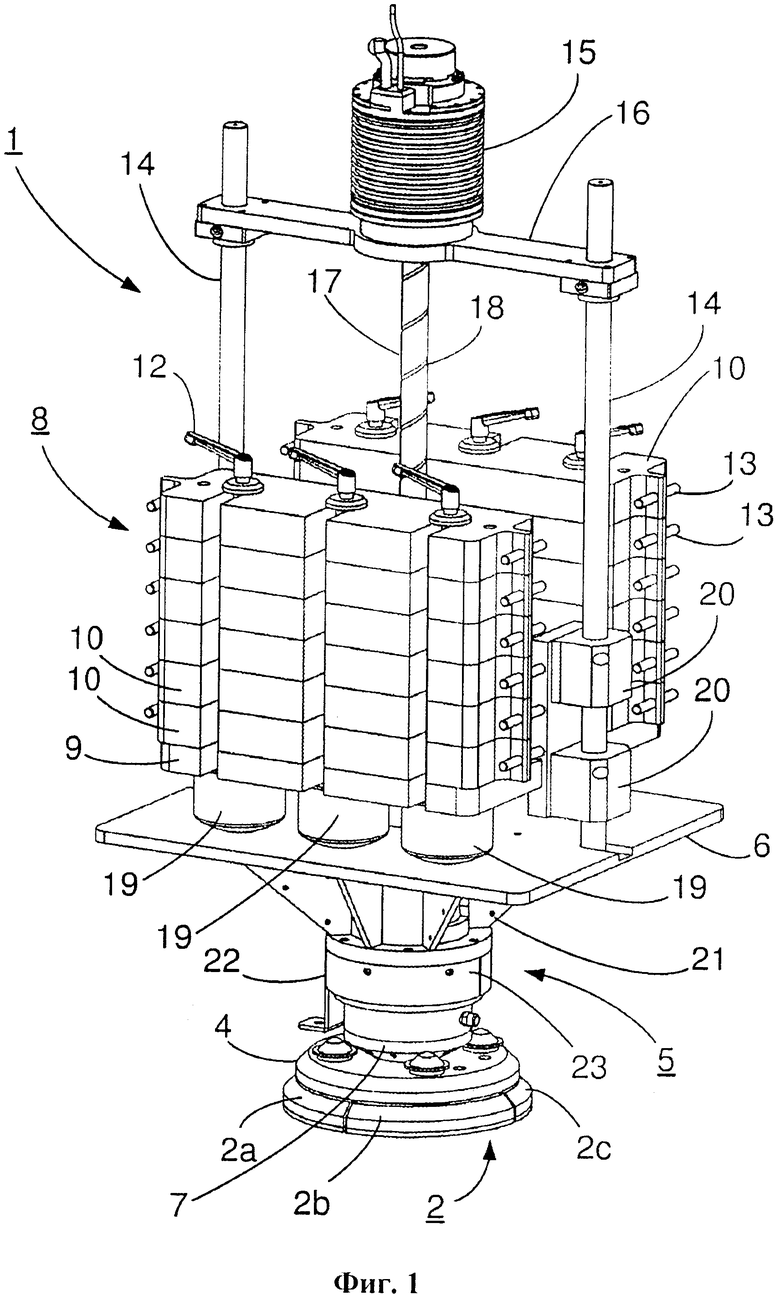
1. Дефлектометр с падающим грузом, содержащий:
нагрузочную плиту, приспособленную к зацеплению с испытуемой поверхностью,
средство передачи усилия, приспособленное для передачи усилия нагрузочной плите,
амортизирующее средство,
падающий груз, приспособленный для удара указанного средства передачи усилия посредством указанного амортизирующего средства таким образом, чтобы обеспечить передачу усилия к указанной нагрузочной плите посредством указанного средства передачи усилия,
направляющее средство, предназначенное для направления указанного падающего груза к указанному средству передачи усилия, и подъемное средство, предназначенное для подъема указанного падающего груза на предопределенную высоту, находящуюся выше указанного средства передачи усилия,
отличающийся тем, что указанное подъемное средство содержит электродвигатель, приводящий в движение резьбовой шпиндель, находящийся в зацеплении с падающим грузом, причем резьбовой шпиндель находится в зацеплении без самоторможения с падающим грузом.
2. Дефлектометр по п. 1, в котором резьбовой шпиндель находится в постоянном зацеплении с падающим грузом.
3. Дефлектометр по п. 1, в котором резьбовой шпиндель находится в постоянном зацеплении с электродвигателем.
4. Дефлектометр по п. 3, в котором резьбовой шпиндель приводится в движение непосредственно электродвигателем.
5. Дефлектометр по п. 1, в котором зацепление между резьбовым шпинделем и падающим грузом выбирается из числа систем зацепления на основе ходовых винтов, роликовых ходовых винтов или шариковых ходовых винтов.
6. Дефлектометр по п. 1, в котором резьбовой шпиндель находится в зацеплении без самоторможения и имеет угол подъема резьбы, превышающий 40°, предпочтительно превышающий 50°.
7. Дефлектометр по п. 1, который содержит контроллер для электродвигателя, причем указанный контроллер приспособлен для управления скоростью падающего груза.
8. Дефлектометр по п. 1, который содержит контроллер для электродвигателя, причем указанный контроллер приспособлен для управления положением падающего груза.
9. Дефлектометр по любому из пп. 1-8, который содержит раму и средство для закрепления падающего груза относительно рамы.
| WO 2012120179 A1, 13.09.2012 | |||
| УЗЕЛ КРЕПЛЕНИЯ ПАЛЬЦЕВ ПОДБОРЩИКА | 2012 |
|
RU2496298C1 |
| Корреляционный дискриминатор | 1976 |
|
SU577541A1 |
| US 2014182405 A1, 03.07.2014 | |||
| Предохранительный тормоз со свободно падающим грузом | 1927 |
|
SU13177A1 |

