Изобретение относится к мобильным (буксируемым или встроенным в автомобиль) измерительным средствам, предназначенным для непрерывного измерения коэффициента сцепления колес с поверхностью взлетно-посадочных полос аэродромов с твердым покрытием, а также может быть использовано для исследования сцепных свойств сооружаемых и эксплуатируемых дорог с твердым покрытием.
Эффективное управление проскальзыванием колес в режиме торможения или разгона является одной из наиболее известных и в то же время далеких от полного разрешения проблем в области конструирования подвижных аппаратов. Очевидно, что на поверхностях, характеризуемых «сухим» трением, наиболее эффективным является торможение вообще без проскальзывания колеса со значениями момента торможения, близкими к моменту «покоя» («трогания»), который соответствует максимальному значению момента трения, а значит, и наилучшему торможению. В действительности осуществляемое самолетными и автомобильными автоматами торможение определяется не столько самим фактом отсутствия блокировки колес, сколько обеспечением оптимального значения проскальзывания между аэродромным или автодорожным покрытием и пневматиком колес воздушных судов и автотранспортных средств. При проскальзывании по поверхностям с сухим трением реальный процесс торможения (с помощью автоматов торможения) носит импульсный («срывной») характер, и статистика утверждает, что обычно торможение осуществляется автоматами торможения при среднем значении скольжения, равном 0,1÷0,2, а наиболее быстродействующие современные автоматы торможения работают при среднем скольжении, даже меньшем 0,05.
Еще в 50-х годах прошлого века указывалось на то, что «качение на границе со скольжением является оптимальным режимом торможения» [Крагельский И.В., Щедров B.C. Развитие науки о трении. Изд-во Академии наук СССР, 1958. - 290 с.]. Это означает, что если торможение при качении без скольжения колеса относительно поверхности покрытия и невозможно, то оно, по-видимому, тем эффективнее, чем с меньшей долей скольжения осуществляется.
Пути развития методов и техники измерений фрикционных свойств автодорожных и аэродромных покрытий характеризуются, в основном, двумя направлениями: первое направление связано с дискретным измерением максимальной величины коэффициента сцепления колеса с локальной поверхностью покрытий, в основном, эксплуатируемых или сооружаемых автодорог с твердым покрытием, в том числе при расследовании дорожно-транспортных происшествий (ДТП). Второе направление связано с непрерывным измерением фрикционных свойств покрытия взлетно-посадочных полос (ВПП) с целью определения возможности безопасной посадки воздушных судов при торможении колесами. Общность главной задачи, решаемой в обоих направлениях (автодорожном и аэродромном), каковой является задача прогнозирования тормозного пути автомобиля (при экстренном торможении) и воздушного судна (при посадке), позволяет объединить создаваемую для этих целей измерительную технику в один класс мобильных (буксируемых или встроенных в автомобиль) установок для измерения коэффициента сцепления специального измерительного колеса с автодорожным и аэродромным покрытием. Однако существует и специфика измерений, а именно: в автодорожной отрасли измерения фрикционных свойств носят дискретный характер и применяются для измерения фрикционных свойств отдельных участков дорог в случаях расследования ДТП, для калибровочных измерений и исследований фрикционных свойств различных материалов покрытий, применяемых при строительстве дорог и т.п., тогда как измерения фрикционных свойств ВПП носят непрерывный характер, измерения проводятся систематически в различных погодных условиях в зимний и летний периоды по всей длине ВПП с целью прогнозирования тормозного пути подлетающего воздушного судна при посадке, а соответствующие мобильные установки включены в состав обязательного перечня машин и механизмов эксплуатационного содержания сертифицированных аэродромов, относящихся к измерению параметров, контролю и оценке состояния элементов летного поля.
Метод непрерывного предпосадочного оперативного контроля фрикционных свойств ВПП путем прокатывания специального измерительного колеса по поверхности ВПП вдоль по всей ее длине туда и обратно с принудительным подтормаживанием его с постоянным скольжением и одновременным измерением и индикацией текущих значений коэффициента сцепления регламентирован Руководствами международных организаций ICAO (International Civil Aviation Organization) и FAA (Federal Aviation Administration, USA), а в России - Руководством по эксплуатации гражданских аэропортов Российской Федерации (РЭГА РФ-94).
Известны мобильные установки, реализующие метод непрерывного измерения коэффициента сцепления (КС) путем прокатывания измерительного колеса по поверхности с постоянным скольжением и используемые для оперативного контроля фрикционных свойств взлетно-посадочных полос с твердым покрытием (хотя они могут использоваться также для автодорожных покрытий). Так, например, известное устройство, являющееся в настоящее время в России единственным сертифицированным средством измерения коэффициента сцепления (КС) аэродромных покрытий и находящееся в эксплуатации с 1974 года, описано в АС №630982, М.кл.3 G01M 19/02, опубликовано 30.03.1981. Оно содержит одноосный прицеп, включающий раму, установленную на несущем колесе и измерительном колесе, соединенных между собой посредством карданного вала. Колеса взяты с соотношением диаметров 1,11-1,17, обеспечивающим 11-17% проскальзывание измерительного колеса. Устройство также содержит измерительный элемент в виде тензодатчика, размещенного между рамой и направляющей тягой, расположенными в вертикальном плоскости продольной оси измерительного колеса, упругий элемент, направляющие ролики и боковую тягу водила, шарнирно соединенную с направляющей тягой и центральной тягой водила. Другой конец центральной тяги шарнирно закреплен на раме в точке, расположенной на продольной оси, проходящей через центр тяжести устройства. Водило имеет петлю для соединения с транспортным средством. Устройство снабжено амортизатором. При перемещении устройства вследствие контакта несущего колеса и измерительного колеса с аэродромным покрытием обеспечивается прокатывание измерительного колеса с проскальзыванием 0,11÷0,17 в продольной плоскости. При этом возникающая продольная сила сцепления измерительного колеса с покрытием передается на раму и создает момент, разворачивающий устройство в горизонтальной плоскости вокруг его центра. Однако этому препятствует водило, передающее усилие от разворачивающего момента на транспортное средство, которое гасит это усилие. Упругий элемент и амортизатор снижают вибрации с измерительного элемента, что способствует повышению точности измерения. Электрический сигнал измерительного элемента через гибкий электрический кабель поступает в вычислитель, находящийся в кабине автомобиля-буксировщика. Вычисленное значение коэффициента сцепления фиксируется стрелочным прибором. Оператор следит за показаниями стрелки и значения коэффициента сцепления с периодичностью не более 10 с, записывает в журнал.
Недостатками известного устройства являются низкие показатели точности и надежности измерительного элемента; неучтенные потери трения в механическом тракте передачи продольной силы скольжения от измерительного колеса к измерительному элементу, приводящие к дополнительным погрешностям измерений; неопределенность величины проскальзывания в диапазоне 0÷0,17 измерительного колеса меньшего диаметра, так как предположение, что колесо большего диаметра не проскальзывает, на практике очевидным образом не выполняется; наконец, полное отсутствие каких-либо элементов автоматизации процесса измерений, обработки и передачи информации.
Известно также более совершенное устройство [патент США №4098111, МПК G01N 19/2, опубликовано 04.07.1978], которое представляет собой агрегат, расположенный на двухосной буксируемой тележке или встроенный в автомобиль. Известное устройство содержит механическую измерительную систему с измерительным колесом специального исполнения, измерительными датчиками, преобразующими величины измеряемых сил в электрические сигналы, и электронный блок с регистрирующим устройством, в котором указанные электрические сигналы преобразуются в искомую величину коэффициента сцепления. Механическая измерительная система представляет собой подвесной агрегат автомобиля, закрепленный на балке заднего моста. В механическую измерительную систему входят: двухступенчатый цепной редуктор, размещенный в составном шарнирно сочлененном корпусе, измерительный датчик, установленный в ступице измерительного колеса, дифференциал и полуоси, размещенные в жесткой балке заднего моста, и задающие колеса, роль которых выполняют неведущие (несущие, опорные) колеса транспортного средства. Измерительный датчик, размещенный в ступице измерительного колеса и представляющий собой тензометрическую систему, измеряет величину усилий, действующих между измерительным колесом и корпусом редуктора в вертикальной и горизонтальной плоскостях. Нагружение измерительного колеса вертикальной силой осуществляется грузом, шарнирно закрепленным на кузове автомобиля и воздействующим на измерительное колесо через упругую стойку, корпус редуктора и ступицу измерительного колеса с измерительным датчиком. Нагружение измерительного колеса крутящим моментом, обеспечивающим ему заданную величину проскальзывания относительно поверхности дорожного (аэродромного) покрытия, осуществляется от задних колес автомобиля, размещенных на жесткой балке заднего моста, через полуоси, проходящие внутри этой балки, дифференциал, вращающийся относительно балки в подшипниках, и двухступенчатый цепной редуктор, ведущая звездочка которого закреплена на коробке дифференциала, а ведомая - на выходном валу редуктора, соединенном с измерительным колесом.
Основным недостатком этого устройства является то, что механическая система торможения измерительного колеса прокатывает его с постоянным значением скольжения, задаваемым кинематически с помощью понижающего редуктора, связывающего несущие колеса установки с измерительным колесом. При равномерном движении таких установок по ВПП измерительное колесо прокатывается принудительно равномерно с раз и навсегда кинематически заданным постоянным скольжением, и поэтому в них нельзя управлять режимами торможения. Но это далеко не соответствует действительным режимам торможения колес транспортных средств, осуществляемым их автоматами торможения, следовательно, измерения, производимые с помощью таких установок, приводят к значительным ошибкам прогнозирования тормозного пути. Другим недостатком является сложность конструкции измерительной ступицы, снижающей точность измерения продольной силы торможения с помощью установленного в ней тензодатчика.
Известен также способ определения коэффициента сцепления колес с поверхностью, описанный в патенте SU №1516898, МПК G01N 19/02, опубликовано 23.10.1989. Измерительное и эталонное колеса устройства, реализующего этот способ, нагружают нормальной силой и катят по диагностируемой поверхности с постоянной скоростью, причем эталонное колесо катится без скольжения. Измерительному колесу задают фиксированную степень проскальзывания (скольжение) при помощи двигателя постоянного тока независимого возбуждения, изменяя ток якоря двигателя, причем степень проскальзывания можно задавать отрицательную (работа двигателя в тормозном режиме противовключения) и положительную (работа двигателя в двигательном режиме). Измеряют ток якоря IЯ двигателя, а коэффициент fC сцепления измерительного колеса с диагностируемой поверхностью определяют по формуле
где СM - конструктивная постоянная двигателя; φ - магнитный поток двигателя; IЯ - ток якоря двигателя; RД - динамический радиус измерительного колеса; РК - сила сопротивления качению измерительного колеса; Q - нормальная сила, действующая на измерительное колесо; «+» - при двигательном режиме, «-» - при тормозном режиме работы двигателя. В указанном способе для создания проскальзывания измерительного колеса предлагается использовать присоединяемую к нему электрическую машину постоянного тока с независимым возбуждением для управления проскальзыванием, при этом появляется принципиальная возможность управлять режимами торможения измерительного колеса, которая отсутствует в вышеописанных устройствах. Кроме того, исключены неточные и ненадежные тензодатчики, измерительным элементом является датчик тока якоря электрической машины, имеющий значительно более высокие показатели точности не хуже ±0,5% и надежности (срок службы датчика тока может превышать срок службы самого устройства). Повышение точности измерений достигается также учетом потерь сопротивления качению измерительного колеса.
Однако недостатком данного способа является то, что в нем отсутствуют какие бы то ни было предложения или хотя бы авторские соображения по реализации процесса формирования заданного скольжения измерительного колеса, т.е. управления его тормозными режимами. Кроме того, не указывается на необходимость учета сил трения, возникающих при движении устройства с заданной скоростью в кинематическом тракте, соединяющем электрическую машину и измерительное колесо, и создающих неучтенную датчиком тока дополнительную продольную тормозящую силу, что снижает точность измерений. Наконец, необходимость использования в расчетной формуле для коэффициента сцепления fC такой трудноопределяемой величины, как магнитный поток φ электрической машины, являющийся нелинейной функцией тока возбуждения машины, делает предлагаемое формульное вычисление коэффициента сцепления по измеренным значениям тока якоря невозможным.
Наиболее близким к предлагаемому изобретению является устройство для определения коэффициента сцепления колеса с аэродромным покрытием [патент RU №2259569, МПК G01М 15/08, опубликовано 27.08.2005], которое содержит измерительную тележку и блок регистрации, а измерительная тележка содержит измерительное колесо, блокировочную муфту, редуктор, измерительный элемент и раму измерительной тележки, измерительное колесо блокировочной муфтой механически соединяется с редуктором. Блок регистрации содержит вычислитель и пульт управления, который подключается к первому входу вычислителя. Выход измерительного элемента по гибкому кабелю подключен ко второму входу вычислителя. Дополнительно в состав измерительной тележки включены независимый груз, муфта свободного хода, генератор постоянного тока с независимым возбуждением, блок силовых ключей, блок активной нагрузки, первый и второй датчики угловых скоростей, пусковое сопротивление, аккумуляторная батарея, регулятор напряжения, контактор, ведомые (несущие) колеса. При этом независимый груз нормально соединен с измерительным колесом. Муфта свободного хода соединяет редуктор с ротором генератора постоянного тока. Силовая шина аккумуляторной батареи через контактор и пусковое сопротивление подключена к силовому входу/выходу генератора постоянного тока, силовой вход/выход которого через блок силовых ключей соединен с блоком активной нагрузки, а также через регулятор напряжения подключен ко входу генератора постоянного тока, являющегося входом его обмотки возбуждения. Второй выход аккумуляторной батареи подключен ко второму входу контактора. Измерительное и ведомое колеса соединены соответственно с первым и вторым датчиками угловых скоростей, ведомые колеса соединены с рамой измерительной тележки, которая через измерительный элемент подключена к транспортному средству. Блок регистрации дополнительно содержит блок управления, блок памяти, дисплей и контроллер. Порт входа/выхода вычислителя подключен к блоку памяти, а первый, второй и третий выходы вычислителя подключены соответственно к дисплею, блоку управления и контроллеру, через который осуществляется связь с внешними устройствами. Измерительная тележка гибким кабелем соединена с блоком регистрации, при этом выходы первого и второго датчиков угловых скоростей подключены соответственно к третьему и четвертому аналоговым входам вычислителя, выход блока управления подключен ко второму входу блока силовых ключей, а второй выход контактора и выходы силовой шины генератора постоянного тока и аккумуляторной батареи подключены соответственно к первому и второму входам пульта управления, пятый свободный аналоговый вход вычислителя предусмотрен для подключения динамометра силового стенда (при проведении тарирования устройства). Максимальное значение коэффициента сцепления (Ф макс) вычисляется путем измерения максимальной силы продольного динамического торможения измерительного колеса по поверхности аэродромного покрытия, получаемой при работе генератора постоянного тока в генераторном режиме, когда максимальная механическая сила сцепления (Р сцп.макс) измерительного колеса превращается в электрическую и выделяется в виде тепловой энергии в блоке активной нагрузки. Коэффициент сцепления (Ф макс) вычисляется по формуле

где Ф макс - максимальное значение коэффициента сцепления колеса с аэродромным покрытием; Р сцп.макс - максимальная сила сцепления измерительного колеса с поверхностью аэродромного покрытия;
Рг - нормальная сила нагрузки на измерительное колесо.
Через контроллер осуществляется связь с внешними устройствами постоянно через средства радиосвязи или после проведения измерений, информация о состоянии поверхности взлетно-посадочной полосы переписывается в переносной блок памяти для детального анализа и документирования на диспетчерском пункте аэродрома.
Главная особенность устройства состоит в дискретном действии системы торможения измерительного колеса и дискретном определении максимального значения продольного коэффициента сцепления Фмакс колеса с аэродромным покрытием.
В режиме тарирования по данным предварительных (тарировочных) измерений на силовом стенде устанавливается табличная зависимость тяговой силы динамического торможения генератора постоянного тока при измерении задания на входе блока управления, которая вносится в память вычислителя.
В режиме измерения автомобиль-буксировщик набирает скорость, равную скорости измерительного колеса в режиме тарирования. Ротор генератора при этом, питаясь от батареи, разгоняется до соответствующей скорости вращения. При равенстве скоростей вращения выходного вала редуктора и ротора генератора муфта свободного хода подключает редуктор, а значит, и измерительное колесо к ротору генератора.
Режим поиска состоит в равномерном увеличении тока генератора на активной нагрузке, соответственно увеличивается тяговая сила, достигая значения силы страгивания измерительного колеса относительно поверхности ВПП, и дальнейшее увеличение тяговой силы приводит к началу проскальзывания (пробуксовки) измерительного колеса s≥0.
Далее в описании утверждается, что наибольшей силы сцепления измерительное колесо достигает не в момент начала пробуксовки (s=0+0), а при величине скольжения, равной 0,1-0,2. Как только рост тяговой силы, измеряемой измерительным элементом, при плавном увеличении скольжения прекращается, это соответствует, по мнению авторов, максимальному значению тяговой силы торможения измерительного колеса и, следовательно, максимальной силе его сцепления с поверхностью аэродромного покрытия, а значит, и максимальному значению коэффициента сцепления Фмакс, которое вычисляется по формуле (1) и регистрируется. При этом осуществляется дискретное измерение максимальной величины коэффициента сцепления на локальном участке ВПП и утверждается, что измерение производится в соответствии с требованиями ICAO.
Режим скольжения обеспечивает отслеживание максимального коэффициента сцепления на следующих участках ВПП, которые проходит измерительное колесо в процессе движения по ВПП. Если при движении измерительный элемент показывает увеличение или уменьшение тяговой силы (по сравнению с ранее зарегистрированным максимальным значением), то опять включается режим поиска нового максимального значения.
Однако данное устройство имеет ряд недостатков и даже противоречий.
1. Дискретное действие системы электромеханического торможения измерительного колеса, связанное с измерением скольжения в перемежающихся режимах поиска и слежения, противоречит требованиям ICAO, FAA и РЭГА РФ-94, регламентирующим методику непрерывного процесса измерения КС с постоянным значением скольжения, взятым из диапазона 0,1-0,17.
2. Режимы торможения измерительного колеса, принятые в устройстве, далеко не соответствуют рассмотренным выше реальным режимам торможения колес авиашасси самолетов при посадке, осуществляемым самолетными автоматами торможения. Использование картины распределения максимальных значений коэффициента сцепления вдоль ВПП даст чересчур оптимистичный прогноз предполагаемого критического тормозного пути воздушного судна, что приведет к просчетам в принятии решения о его посадке в экстремальных погодных условиях с низким уровнем фрикционных свойств ВПП.
3. При программировании работы устройства авторы исходят из предположения, что зависимость силы сцепления от скольжения плавно возрастет при изменении скольжения от нуля до 0,2, достигая на этом промежутке максимального значения. Однако на поверхностях, характеризуемых «сухим» трением, сила сцепления может достичь первого максимума в момент страгивания (S=0+0) поверхности измерительного колеса относительно поверхности ВПП, после которого резко убывает, достигает локального минимума, а затем плавно начинает возрастать и на отрезке S=0÷0,2 не достигает второго локального максимума. При этом режим поиска может быть прекращен при обнаружении первого максимума или при необнаружении локального максимума и работа устройства нарушается.
4. Кроме того, если авторы полагают, как они утверждают, что максимальное значение силы сцепления лежит на отрезке скольжения S=0,1÷0,2, то и надо организовать режим поиска в этом диапазоне, а не от момента страгивания в диапазоне S=0÷0,2.
5. В устройстве при отсутствии режима непрерывного измерения невозможно получить картину распределения значений КС вдоль ВПП с достаточно малым шагом, регламентируемым требованиями ICAO, FAA и РЭГА РФ-94 (с усреднением на отрезках пути измерения, не превышающих 2 м), что затрудняет оценку критического пути в условиях ненадежного состояния поверхности ВПП.
6. Непонятна роль регулятора напряжения, питающего обмотку возбуждения генератора постоянного тока, ведь при регулировании тока возбуждения табличные зависимости измерений тяговой силы динамического торможения, устанавливаемые в режиме тарирования, теряют смысл, так как тяговая сила будет нелинейно зависеть от уровня выходного сигнала регулятора напряжения, а об этом в описании работы устройства, принятого за прототип, не упоминается.
7. Наконец, недостатком устройства является сложность организации программных режимов поиска и слежения, вдобавок опирающихся на сомнительные предположения характера экстремальной зависимости силы сцепления от скольжения (см. п.3 критики).
Итак, в приведенной критике устройства, принятого за прототип, указывается на то, что процесс измерения коэффициента сцепления не является непрерывным, отмечаются сложность и громоздкость процедур дискретного измерения максимального коэффициента сцепления и ошибочность выбранной авторами стратегии организации измерений, что ставит под сомнение достоверность и точность результатов измерений КС и саму реализуемость устройства.
Техническим результатом, на достижение которого направлено заявляемое изобретение, является повышение достоверности и точности непрерывного измерения коэффициента сцепления колес с поверхностью аэродромных и дорожных покрытий и расширение области его определения путем организации автоматического управления режимами торможения измерительного колеса, приближающего их к действительным режимам торможения колес воздушных судов и транспортных средств.
Указанный технический результат достигается тем, что в устройство измерения коэффициента сцепления колеса с поверхностью аэродромных и дорожных покрытий, содержащее измерительное колесо, расположенное на двухколесной буксируемой установке с несущими колесами, первый редуктор (или цепную передачу), независимый груз, тормозной генератор постоянного тока, датчики угловых скоростей вращения измерительного колеса и несущих колес, аккумуляторную батарею, усилитель напряжения и пульт управления, причем измерительное колесо кинематически соединено через первый редуктор с ротором тормозного генератора, независимый груз установлен на измерительное колесо, аккумуляторная батарея подключена к силовому входу усилителя напряжения, а датчики угловых скоростей кинематически соединены с осями измерительного и несущих колес, дополнительно введены нагрузочный двигатель постоянного тока с независимой обмоткой возбуждения, датчик тока торможения якорной цепи тормозного генератора, датчик тока возбуждения обмотки возбуждения нагрузочного двигателя, блок вычисления разности, второй редуктор и система автоматического управления, причем якорные обмотоки тормозного генератора и нагрузочного двигателя электрически соединены друг с другом встречно-параллельно, а тормозной генератор выполнен с постоянным возбуждением, ротор нагрузочного двигателя кинематически соединен через второй редуктор с осью вращения несущих колес, силовой выход усилителя напряжения соединен с независимой обмоткой возбуждения нагрузочного двигателя, датчик тока торможения включен в цепь якорных обмоток тормозного генератора и нагрузочного двигателя, датчик тока возбуждения включен в цепь питания независимой обмотки возбуждения нагрузочного двигателя, выход блока вычисления разности подключен к управляющему входу усилителя напряжения, положительный вход блока вычисления разности подключен к первому выходу пульта управления, отрицательный вход блока вычисления разности соединен с выходом системы автоматического управления, выходы датчиков угловых скоростей измерительного и несущих колес и выходы датчиков тока торможения тормозного генератора и тока возбуждения нагрузочного двигателя подключены к четырем входам системы автоматического управления, а ее пятый вход подключен ко второму выходу пульта управления.
Система автоматического управления может быть выполнена из последовательно соединенных первого блока вычисления ошибки, делителя, второго блока вычисления ошибки, регулятора скольжения, третьего блока вычисления ошибки, регулятора тока торможения тормозного генератора, четвертого блока вычисления ошибки и регулятора тока возбуждения нагрузочного двигателя, выход которого соединен с отрицательным входом блока вычисления разности, отрицательные входы первого, третьего и четвертого блоков вычисления ошибок соединены соответственно с выходами датчика угловой скорости измерительного колеса, датчика тока торможения тормозного генератора и датчика тока возбуждения нагрузочного двигателя, положительный вход первого блока вычисления ошибки и второй вход делителя соединены с выходом датчика угловой скорости несущих колес, а положительный вход второго блока вычисления ошибки соединен со вторым выходом пульта управления.
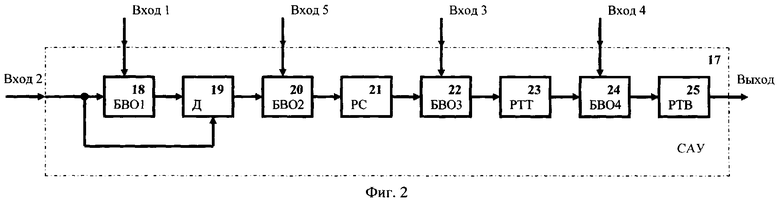
На фиг.1 показана функциональная схема устройства измерения коэффициента сцепления колеса с поверхностью аэродромных и дорожных покрытий.
На фиг.2 показана функциональная схема системы автоматического управления.
Предлагаемое устройство (см. фиг.1) содержит измерительное колесо (ИК) 1, расположенное на двухколесной буксируемой установке с несущими колесами (НК) 2, первый редуктор (Р1) (или цепную передачу) 3, независимый груз (НГ) 4, тормозной генератор постоянного тока (ТГПТ) 5, датчики угловых скоростей вращения (ДУСВ1, ДУСВ2) 6 и 7 измерительного колеса 1 и несущих колес 2 соответственно, аккумуляторную батарею (АБ) 8, усилитель напряжения (УН) 9 и пульт управления (ПУ) 10, причем измерительное колесо 1 кинематически соединяется через первый редуктор 3 с ротором тормозного генератора 5, независимый груз 4 установлен на измерительное колесо 1 и обеспечивает его нагружение с нормальной к исследуемой поверхности силой Fнорм, аккумуляторная батарея 8 подключена к силовому входу усилителя напряжения 9, а датчики угловых скоростей 6 и 7 кинематически соединены соответственно с осями измерительного 1 и несущих 2 колес, а также дополнительно введенные нагрузочный двигатель постоянного тока (НДПТ) 11 с независимой обмоткой возбуждения (НОВ) 12, датчик 13 тока торможения (ДТТ) IT (тока якорной цепи тормозного генератора 5), датчик 14 тока возбуждения (ДТВ) IB обмотки возбуждения 12, блок вычисления разности (БВР) 15, второй редуктор (Р2) 16 и систему автоматического управления (САУ) 17, причем якорные обмотки тормозного генератора 5 и нагрузочного двигателя 11 электрически соединены друг с другом встречно-параллельно, ротор нагрузочного двигателя 11 кинематически соединен через второй редуктор 16 с осью вращения несущих колес 2, силовой выход усилителя напряжения 9 соединен с независимой обмоткой возбуждения 12 нагрузочного двигателя 11, датчик 13 тока торможения IT включен в общую цепь якорных обмоток тормозного генератора 5 и нагрузочного двигателя 11, датчик 14 тока возбуждения IВ включен в цепь питания независимой обмотки возбуждения 12 нагрузочного двигателя 11, выход блока вычисления разности 15 подключен к управляющему входу усилителя напряжения 9, положительный вход блока вычисления разности 15 подключен к первому выходу пульта управления 10, вырабатывающему постоянный сигнал  поступающий через блок вычисления разности 15 на управляющий вход усилителя напряжения 9 и соответствующий напряжению на его силовом выходе, равному номинальному напряжению независимой обмотки возбуждения 12, отрицательный вход блока вычисления разности 15 соединен с выходом системы автоматического управления 17, вырабатывающей сигнал управления uу(t), выходы датчиков 6, 7 угловых скоростей измерительного 1 и несущих 2 колес и выходы датчиков 13, 14 тока торможения IT якорных цепей тормозного генератора 5 и тока возбуждения IB обмотки возбуждения 12 нагрузочного двигателя 11 подключены к четырем входам системы автоматического управления 17, ее пятый вход подключен ко второму выходу пульта управления 10, вырабатывающему задающий (программный) сигнал
поступающий через блок вычисления разности 15 на управляющий вход усилителя напряжения 9 и соответствующий напряжению на его силовом выходе, равному номинальному напряжению независимой обмотки возбуждения 12, отрицательный вход блока вычисления разности 15 соединен с выходом системы автоматического управления 17, вырабатывающей сигнал управления uу(t), выходы датчиков 6, 7 угловых скоростей измерительного 1 и несущих 2 колес и выходы датчиков 13, 14 тока торможения IT якорных цепей тормозного генератора 5 и тока возбуждения IB обмотки возбуждения 12 нагрузочного двигателя 11 подключены к четырем входам системы автоматического управления 17, ее пятый вход подключен ко второму выходу пульта управления 10, вырабатывающему задающий (программный) сигнал  , соответствующий заданной функции скольжения s0(t) или заданной постоянной величине скольжения S0=const, а машина постоянного тока, принятая в качестве тормозного генератора 5, выполнена с постоянным возбуждением на постоянных высокостабильных магнитах.
, соответствующий заданной функции скольжения s0(t) или заданной постоянной величине скольжения S0=const, а машина постоянного тока, принятая в качестве тормозного генератора 5, выполнена с постоянным возбуждением на постоянных высокостабильных магнитах.
Система автоматического управления 17, показанная на фиг.2, содержит последовательно соединенные первый блок вычисления ошибки (БВО1) 18, делитель (Д) 19, второй блок вычисления ошибки (БВО2) 20, регулятор 21 скольжения (PC) S, третий блок вычисления ошибки (БВО3) 22, регулятор 23 тока торможения (РТТ) IT тормозного генератора 5, четвертый блок вычисления ошибки (БВO4) 24 и регулятор 25 тока возбуждения (РТВ) IB нагрузочного двигателя 11, выход которого соединен с отрицательным входом блока вычисления разности 15, отрицательные входы первого, третьего и четвертого блоков вычисления ошибок 18, 22 и 24 соединены соответственно с выходами датчика угловой скорости 6 измерительного колеса 1, датчика тока торможения 13 тормозного генератора 5 и датчика тока возбуждения 14 нагрузочного двигателя, положительный вход первого блока вычисления ошибки 18 и второй вход делителя 19 соединены с выходом датчика угловой скорости 7 несущих колес 2, а положительный вход второго блока вычисления ошибки 20 соединен со вторым выходом пульта управления 10.
Сущность предлагаемого устройства состоит в том, что измерительное колесо 1, расположенное на буксируемой с помощью автомобиля двухколесной установке (или встроенное в автомобиль), нагружают с помощью независимого груза 4 нормальной к исследуемой поверхности силой Fнорм и вместе с несущими колесами 2 буксируемой установки катят по исследуемой поверхности с постоянной поступательной (линейной) скоростью Vлин, причем несущие колеса 2 катятся без скольжения, а к измерительному колесу 1 кинематически через первый редуктор 3 присоединяют электрическую машину постоянного тока 5, работающую в режиме тормозного генератора. Вал тормозного генератора 5 приводится в движение через измерительное колесо 1 силой тяги Fтяги буксировочного автомобиля, преодолевающей касательную к окружности измерительного колеса 1 продольную силу трения скольжения Fтр, действующую вдоль исследуемой поверхности покрытия на площадь контакта измерительного колеса 1 с покрытием в направлении, противоположном направлению буксирования. Управляя развиваемым электромагнитным моментом торможения МТ тормозного генератора 5, формируют заданное значение (или заданную функцию) скольжения (или, говорят, степень проскальзывания) S
где ωНК ωИК - угловые скорости вращения несущих и измерительного колес соответственно. При этом механическая энергия торможения, отбираемая тормозным генератором 5 через измерительное колесо 1 у буксировочного автомобиля, преобразуется (за вычетом электрических и механических потерь) в электрическую энергию торможения. Управление электрической энергией торможения и формирование электромагнитного момента торможения МТ тормозного генератора 5 осуществляют путем электрического подключения якорной обмотки тормозного генератора 5 встречно-параллельно к якорной обмотке нагрузочного двигателя 11, тем самым образуя электромеханический каскад взаимной нагрузки, который позволяет (при правильно организованном с помощью системы автоматического управления 17 управлении) механическую энергию торможения измерительного колеса 1, отбираемую тормозным генератором 5 у буксировочного автомобиля и преобразуемую им в электрическую энергию, возвращать, за вычетом электрических и механических потерь, через нагрузочный двигатель 11, второй редуктор 16 и несущие колеса 2 буксировочному автомобилю, преобразуя ее при этом обратно из электрической энергии в механическую.
Вводят также систему автоматического управления 17, осуществляя автоматическое управление в рамках электромеханического каскада взаимной нагрузки электромагнитным моментом торможения МТ тормозного генератора 5 и формируя режимы автоматического торможения измерительного колеса 1 с любым наперед заданным скольжением S (в некотором допустимом диапазоне), которое поддерживают с заданной точностью в процессе измерения коэффициента сцепления независимо от состояния фрикционных свойств исследуемой поверхности. Для обеспечения функционирования системы автоматического управления 17 вводят датчики 6 и 7 угловых скоростей вращения измерительного 1 и несущих 2 колес, датчик 13 тока торможения IT тормозного генератора 5, а также датчик 14 тока возбуждения IB нагрузочного двигателя 11, выходы всех введенных датчиков соединяют со входами системы автоматического управления 17, к одному из ее входов подключают также выход пульта управления 10, вырабатывающий задающий сигнал скольжения , а управляющий сигнал uy выхода системы автоматического управления 17 подключают к отрицательному входу блока вычисления разности 15.
Таким образом, предлагаемое устройство автоматического торможения измерительного колеса 1 является энергосберегающим, так как для управления циркуляцией в электромеханическом каскаде энергии торможения, равной Fтр·Vлин, в режимах торможения измерительного колеса 1 при изменении скольжения в диапазоне 0≤S<1 расходуется только мощность потерь (составляющая не более 25÷35% мощности торможения).
Отметим, что для управления током торможения IT якорных цепей каскада, а значит, и электромагнитным моментом торможения МT тормозного генератора 5, создающего силу торможения на кинематически соединенном с ним измерительном колесе 1, можно управлять любой из встречных ЭДС электрических машин каскада с помощью изменения ее тока (и магнитного потока) возбуждения. Поэтому любая из двух электрических машин 5 и 11 постоянного тока может быть выбрана с независимым возбуждением, т.е. с возможностью управлять напряжением и током ее обмотки возбуждения, а значит, потоком и ЭДС этой машины. Выбор в качестве машины с независимым возбуждением нагрузочного двигателя 11, а не тормозного генератора 5 предпочтительнее, так как позволяет обеспечить высокую стабильность постоянного, равного номинальному, магнитного потока тормозного генератора 5 путем выбора в качестве тормозного генератора 5 электрической машины с постоянными высокостабильными магнитами, а значит, создать благоприятные условия для формирования и точного измерения тормозного момента на измерительном колесе 1.
Действительно, электромагнитный момент торможения МT, развиваемый тормозным генератором 5, пропорционален току якорных цепей и магнитному потоку и рассчитывается по формуле
MT=CMITФТГ,
где СM - конструктивная постоянная тормозного генератора 5, IT - ток общей якорной цепи электрических машин 5 и 11 каскада. ФТГ - магнитный поток тормозного генератора 5, который, как сказано выше, поддерживается постоянным и номинальным, равным  , поэтому окончательно электромагнитный момент торможения МT будет пропорционален току якорных цепей IT:
, поэтому окончательно электромагнитный момент торможения МT будет пропорционален току якорных цепей IT:

Таким образом, сохранение постоянным и номинальным магнитного потока тормозного генератора 5 путем выбора его с постоянными магнитами создает предпосылки для использования при вычислении текущих значений коэффициента сцепления точного (класса 0,1), надежного и долговечного датчика 13 тока IT торможения.
Устройство работает следующим образом. При буксировании установки с некоторой постоянной линейной скоростью Vлин якорные обмотки электрических машин 5 и 11, включенные встречно-параллельно, вращаются с некоторыми постоянными угловыми скоростями и вырабатывают встречные ЭДС eНД и eТГ, пропорциональные угловым скоростям измерительного 1 и несущих 2 колес и магнитным потокам возбуждения, а система автоматического управления 17 обеспечивает такие условия, что электрическая машина 5, сочлененная с измерительным колесом 1, как правило, работает в генераторном режиме, при этом вторая электрическая машина 11 с необходимостью будет работать в двигательном режиме. Тормозной генератор 5 создает на оси измерительного колеса 1 тормозной момент, а нагрузочный двигатель 11 развивает движущий момент, приложенный к несущим колесам 2 установки и равный, за вычетом механических и электрических потерь, тормозному моменту и противоположный ему по направлению. Таким образом, устройство с электромеханическим торможением является управляемым и энергосберегающим, так как в любой момент времени движения установки она, с одной стороны, «подтормаживается» измерительным колесом 1, а с другой - «подгоняется» несущими колесами 2, и энергия торможения измерительного колеса 1 возвращается, за вычетом потерь, через нагрузочный двигатель 11 на несущие колеса 2 установки и далее буксировочному автомобилю. Сам же буксировочный автомобиль «покрывает» лишь энергию потерь. Тем самым образуется замкнутый регулируемый контур циркуляции энергии, расходуемой на создание момента торможения измерительного колеса, а извне, от буксировочного автомобиля, отбирается лишь энергия электрических и механических потерь.
Отличительной особенностью данного устройства, реализованного на базе двух электрических машин 5 и 11, является то, что оно может обеспечить режим торможения «юзом» (S=1,0) с полной блокировкой вращения измерительного колеса 1. При значении скольжения S измерительного колеса 1, близким к единице, когда его угловая скорость и, следовательно, ЭДС, вырабатываемая тормозным генератором 5, приближаются к нулю, разность ЭДС электрических машин eТГ-eНД уменьшается, и при каком-то значении S, близком к единице, величина eТГ уже не может обеспечить требуемую по условиям торможения величину тока торможения якоря IT даже при еНД=0, т.е. при токе возбуждения нагрузочного двигателя 11, равном нулю. Поэтому для сохранения неизменного направления IT, соответствующего работе электрической машины 5 в генераторном режиме, нагрузочный двигатель 11 должен перейти также в генераторный режим, что обеспечивается переключением направления тока возбуждения IB независимой обмотки возбуждения нагрузочного двигателя 11, осуществляемым автоматически с помощью системы автоматического управления 17. Таким образом, в рамках данного устройства при условиях, когда обе электрические машины работают в генераторном режиме, можно также управлять движением измерительного колеса 1 при значениях скольжения S>1,0, хотя этот режим и не является физически осуществимым в реальных условиях торможения воздушного судна.
В рамках предлагаемого устройства возможно также осуществить режим управления скольжением измерительного колеса 1 при отрицательных значениях скольжения S<0, когда измерительное колесо 1 вращается с угловой скоростью, превышающей значение его угловой скорости при свободном качении. При этом ток IT якорной цепи должен изменить свое направление на противоположное, что возможно при выполнении неравенства
eНД>eТГ,
при этом тормозной генератор 5 будет работать в двигательном режиме, а нагрузочный двигатель 11, наоборот, будет работать в генераторном режиме, хотя такой режим также не является физически осуществимым в реальных условиях торможения воздушного судна.
Система автоматического управления 17 работает следующим образом. Пусть в исходном режиме системы 17 задающий сигнал пульта управления 10 равен нулю, что соответствует свободному качению (без скольжения) измерительного колеса 1. В этом режиме величины ЭДС eНД и eТГ якорей тормозного генератора 5 и нагрузочного двигателя 11 соответственно взаимно уравновешены, ток торможения IT якорных цепей равен нулю, электромагнитный тормозной момент, развиваемый тормозным генератором 5, равен нулю и незначительная величина тормозного момента на измерительном колесе 1 обусловлена лишь суммарными потерями, упомянутыми выше и учтенными далее в формуле (3). Подадим на вход системы автоматического управления 17 (на положительный вход второго блока вычисления ошибки 20) задающий сигнал , отличный от нуля и пропорциональный заданной величине скольжения S0(t) измерительного колеса 1. После прохождения через последовательно соединенные регуляторы 21, 23 и 25 (которые можно в первом приближении считать блоками пропорционального усиления с коэффициентами усиления βC, βT и βB соответственно) этот сигнал преобразуется в выходной сигнал uу(t) системы 17 и поступает на отрицательный вход блока вычисления разности 15, уменьшая на его выходе разность сигналов  , которая поступает на вход усилителя напряжения 9 - силового электронного блока управления напряжением обмотки возбуждения 12 нагрузочного двигателя 11. Выходное напряжение усилителя напряжения 9 начинает уменьшаться и уменьшает результирующее напряжение обмотки возбуждения 12, а следовательно, уменьшает поток возбуждения нагрузочного двигателя 11. ЭДС нагрузочного двигателя 11 eНД уменьшается, а ЭДС тормозного генератора 5 eТГ остается неизменной. В якорных цепях возникает ток торможения IT, направленный встречно направлению eНД и согласно направлению eТГ. Таким образом, тормозной генератор 5 начинает работать в генераторном режиме, вырабатывая тормозной момент, приложенный к измерительному колесу 1, а нагрузочный двигатель 11, работая в двигательном режиме, создает двигательный момент, приложенный к несущим колесам 2. При постоянном действии входного сигнала тормозной момент тормозного генератора 5 увеличивается до тех пор, пока угловая скорость ωИК измерительного колеса 1 не начнет уменьшаться по сравнению с угловой скоростью ωНК несущих колес 2, на выходе первого блока вычисления ошибки 18 появляется сигнал, пропорциональный разности ωНК-ωИК, он поступает на вход делителя 19, на второй вход делителя 19 поступает сигнал, пропорциональный ωНК, и делитель 19 вычисляет их отношение, вырабатывая сигнал, пропорциональный скольжению
, которая поступает на вход усилителя напряжения 9 - силового электронного блока управления напряжением обмотки возбуждения 12 нагрузочного двигателя 11. Выходное напряжение усилителя напряжения 9 начинает уменьшаться и уменьшает результирующее напряжение обмотки возбуждения 12, а следовательно, уменьшает поток возбуждения нагрузочного двигателя 11. ЭДС нагрузочного двигателя 11 eНД уменьшается, а ЭДС тормозного генератора 5 eТГ остается неизменной. В якорных цепях возникает ток торможения IT, направленный встречно направлению eНД и согласно направлению eТГ. Таким образом, тормозной генератор 5 начинает работать в генераторном режиме, вырабатывая тормозной момент, приложенный к измерительному колесу 1, а нагрузочный двигатель 11, работая в двигательном режиме, создает двигательный момент, приложенный к несущим колесам 2. При постоянном действии входного сигнала тормозной момент тормозного генератора 5 увеличивается до тех пор, пока угловая скорость ωИК измерительного колеса 1 не начнет уменьшаться по сравнению с угловой скоростью ωНК несущих колес 2, на выходе первого блока вычисления ошибки 18 появляется сигнал, пропорциональный разности ωНК-ωИК, он поступает на вход делителя 19, на второй вход делителя 19 поступает сигнал, пропорциональный ωНК, и делитель 19 вычисляет их отношение, вырабатывая сигнал, пропорциональный скольжению  , этот сигнал подается с обратным знаком на вход второго блока вычисления ошибки 20, уменьшая результирующую ошибку, вырабатываемую на выходе блока 20 и обеспечивая тем самым главную отрицательную обратную связь по скольжению S. Скольжение S измерительного колеса 1 возрастает до тех пор, пока его величина не станет близкой (почти равной) заданной величине S0(t), предписываемой задающим сигналом . Таким образом, в процессе непрерывного измерения коэффициента сцепления тормозной генератор 5 обеспечивает необходимое торможение измерительного колеса 2 с одновременным автоматическим поддержанием с помощью системы автоматического управления 17 заданного скольжения в виде произвольной функции времени S0(t) или постоянной величины S=const с быстродействием и точностью, определяемыми выбором настроек
, этот сигнал подается с обратным знаком на вход второго блока вычисления ошибки 20, уменьшая результирующую ошибку, вырабатываемую на выходе блока 20 и обеспечивая тем самым главную отрицательную обратную связь по скольжению S. Скольжение S измерительного колеса 1 возрастает до тех пор, пока его величина не станет близкой (почти равной) заданной величине S0(t), предписываемой задающим сигналом . Таким образом, в процессе непрерывного измерения коэффициента сцепления тормозной генератор 5 обеспечивает необходимое торможение измерительного колеса 2 с одновременным автоматическим поддержанием с помощью системы автоматического управления 17 заданного скольжения в виде произвольной функции времени S0(t) или постоянной величины S=const с быстродействием и точностью, определяемыми выбором настроек
βС, βТ и βВ регуляторов 21, 23 и 25.
Отметим, что регулятор скольжения 21 может быть выполнен в виде пропорционально-интегрирующего усилителя и, интегрируя входной сигнал - ошибку рассогласования (S0(t)-S(t)), будет поддерживать ее равной нулю (с точностью до времени переходного процесса). Поэтому усредненное значение скольжения S(t) поддерживается равным заданному скольжению S0(t) с высокой точностью (менее ±0,005) на промежутке регулирования не более 0,1 с (т.е. на промежутке не более 2 м при движении установки со скоростью 60 км/час), что определяется проектируемым быстродействием и динамической точностью системы автоматического управления 17 в переходных процессах, обеспечиваемых выбором коэффициентов усилений регуляторов 21, 23 и 25.
Таким образом, предлагаемое устройство с управляемым электромеханическим торможением измерительного колеса 1, выполненное на базе двух электрических машин 5 и 11 постоянного тока (одна с независимым возбуждением, а другая с постоянными магнитами), включенных по схеме электромеханического каскада взаимной нагрузки, позволяет обеспечить управление торможением со скольжением S измерительного колеса 1 в диапазонах:
а) 0≤S≤1,0; б) S>1,0; в) S<0.
Отметим, что предлагаемое устройство с нагрузочным двигателем 11, обеспечивающим управляемое преобразование электрической энергии торможения тормозного генератора 5, обладает наиболее широкими возможностями автоматического управления скольжением измерительного колеса в указанных диапазонах по сравнению с любыми другими возможными вариантами исполнения этого устройства.
Рассмотрим методику вычисления текущих значений коэффициента сцепления в предлагаемом устройстве. Она основывается на точном измерении тока торможения IT тормозного генератора 5, а также на экспериментальном определении на специальном калибровочном стенде с датчиком силы класса точности не хуже 0,5 величины постоянного коэффициента kM тормозного генератора из формулы (2) и измерении экспериментальной характеристики тока суммарных  (электрических, механических и вентиляционных) потерь, которые вычисляются для каждого конкретного исполнения устройства. В вычислениях коэффициента сцепления исходят из общей формулы коэффициента сцепления вида
(электрических, механических и вентиляционных) потерь, которые вычисляются для каждого конкретного исполнения устройства. В вычислениях коэффициента сцепления исходят из общей формулы коэффициента сцепления вида
где КС - коэффициент сцепления, Fтр - касательная продольная сила трения скольжения (кг) и Fнорм - сила нагружения (кг) измерительного колеса 1, введенные выше. Привлекая формулу (2) и учитывая вклад в торможение измерительного колеса 1 суммарных потерь, запишем окончательную формулу для текущих значений КС в виде

где iред - передаточное отношение первого редуктора (цепной передачи) 3, передающего момент торможения МТ с вала тормозного генератора 5 на вал ступицы измерительного колеса 1; rИК - приведенный радиус (м) измерительного колеса 1 с учетом деформации пневматика; 9,81 - значение ускорения свободного падения (мс-2); IT - измеренные текущие значения тока торможения (А) цепи тормозного генератора 5; 
 - текущие значения экспериментально снятой характеристики тока потерь (А) как зависимости тока холостого хода тормозного генератора 5 от угловой скорости ωИК измерительного колеса 1; kM - экспериментально вычисленная конструктивная постоянная (НА-1) тормозного генератора 5; знак «+» и знак «-» относятся соответственно к генераторному и к двигательному режимам тормозного генератора 5 и автоматически учитываются в процессе работы системой автоматического управления 17.
- текущие значения экспериментально снятой характеристики тока потерь (А) как зависимости тока холостого хода тормозного генератора 5 от угловой скорости ωИК измерительного колеса 1; kM - экспериментально вычисленная конструктивная постоянная (НА-1) тормозного генератора 5; знак «+» и знак «-» относятся соответственно к генераторному и к двигательному режимам тормозного генератора 5 и автоматически учитываются в процессе работы системой автоматического управления 17.
Таким образом, согласно изобретению в предлагаемом устройстве измерения коэффициента сцепления колеса с поверхностью аэродромных и дорожных покрытий путем организации автоматически управляемого процесса торможения измерительного колеса 1 с заданным скольжением с помощью широко регулируемого электромеханического каскада взаимной нагрузки, построенного на базе двух электрических машин 5 и 11 постоянного тока, выполненных одна машина 11 - с независимо управляемым возбуждением, а другая машина 5 - с постоянным возбуждением на высокостабильных постоянных магнитах, обеспечиваются непрерывное измерение коэффициента сцепления с автоматически управляемым в широком диапазоне скольжением измерительного колеса 1, высокая точность регистрации измеряемой величины тока торможения и учета суммарных потерь, что позволяет (при условии постоянства потока возбуждения тормозного генератора 5) повысить достоверность и точность вычисления текущих значений коэффициента сцепления и расширить область его определения в предлагаемом устройстве по сравнению с прототипом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство измерения коэффициента сцепления колес воздушных судов с покрытием взлетно-посадочных полос | 2016 |
|
RU2647336C1 |
| Устройство измерения коэффициента сцепления колес с аэродромным покрытием | 2015 |
|
RU2612074C1 |
| Адаптивная система управления электромеханическим устройством торможения колеса | 2016 |
|
RU2643305C1 |
| Измерительная электромеханическая система | 2022 |
|
RU2797501C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ КОЛЕСА С АЭРОДРОМНЫМ ПОКРЫТИЕМ | 2004 |
|
RU2259569C1 |
| Автоматический стенд для испытаний трансмиссий | 1987 |
|
SU1460640A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ КОЛЕСА С ПОВЕРХНОСТЬЮ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2626581C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ КОЛЕСА С ПОВЕРХНОСТЬЮ ИСКУССТВЕННОГО ПОКРЫТИЯ | 2014 |
|
RU2562355C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ КОЛЕСА С ПОВЕРХНОСТЬЮ АЭРОДРОМНОГО ПОКРЫТИЯ | 2006 |
|
RU2308705C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ КОЛЕСА С АЭРОДРОМНЫМ ПОКРЫТИЕМ | 2005 |
|
RU2298166C1 |
Изобретение относится к средствам для измерения коэффициента сцепления колес с дорожной поверхностью. Устройство содержит нагрузочный двигатель постоянного тока с независимой обмоткой возбуждения, датчик тока торможения якорной цепи тормозного генератора, датчик тока возбуждения обмотки возбуждения нагрузочного двигателя, блок вычисления разности, первый и второй редуктор, систему автоматического управления. Якорные обмотки тормозного генератора и нагрузочного двигателя электрически соединены друг с другом встречно-параллельно, а тормозной генератор выполнен с постоянным возбуждением. Ротор нагрузочного двигателя кинематически соединен через второй редуктор с осью вращения несущих колес. Силовой выход усилителя напряжения соединен с независимой обмоткой возбуждения нагрузочного двигателя. Датчик тока торможения включен в цепь якорных обмоток тормозного генератора и нагрузочного двигателя. Датчик тока возбуждения включен в цепь питания независимой обмотки возбуждения нагрузочного двигателя, выход блока вычисления разности подключен к управляющему входу усилителя напряжения, положительный вход блока вычисления разности подключен к первому выходу пульта управления, отрицательный вход блока вычисления разности соединен с выходом системы автоматического управления. Выходы датчиков угловых скоростей измерительного и несущих колес и выходы датчиков тока торможения тормозного генератора и тока возбуждения нагрузочного двигателя подключены к четырем входам системы автоматического управления, а ее пятый вход подключен ко второму выходу пульта управления. Технический результат заключается в повышении достоверности и точности непрерывного измерения коэффициента сцепления, а также в расширении области его определения. 1 з.п. ф-лы, 2 ил.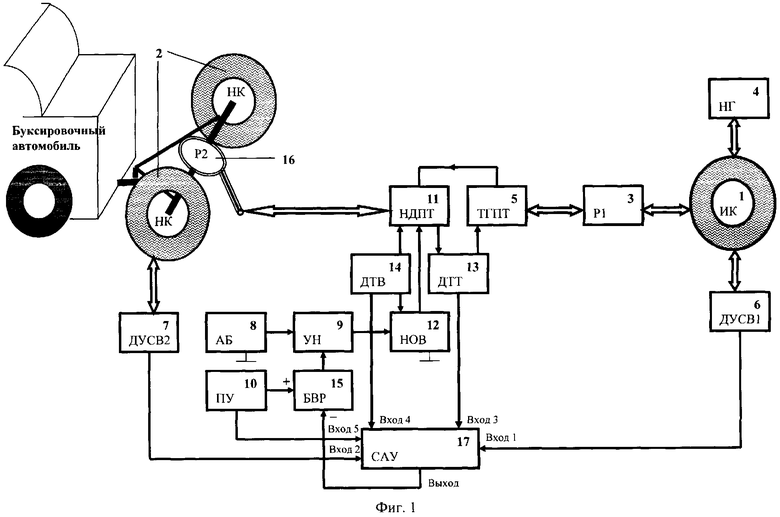
1. Устройство измерения коэффициента сцепления колеса с поверхностью аэродромных и дорожных покрытий, содержащее измерительное колесо, расположенное на двухколесной буксируемой установке с несущими колесами, первый редуктор или цепную передачу, независимый груз, тормозной генератор постоянного тока, датчики угловых скоростей вращения измерительного колеса и несущих колес, аккумуляторную батарею, усилитель напряжения и пульт управления, причем измерительное колесо кинематически соединено через первый редуктор с ротором тормозного генератора, независимый груз установлен на измерительное колесо, аккумуляторная батарея подключена к силовому входу усилителя напряжения, а датчики угловых скоростей вращения кинематически соединены с осями измерительного и несущих колес, отличающееся тем, что в него дополнительно введены нагрузочный двигатель постоянного тока с независимой обмоткой возбуждения, датчик тока торможения якорной цепи тормозного генератора, датчик тока возбуждения обмотки возбуждения нагрузочного двигателя, блок вычисления разности, второй редуктор и система автоматического управления, причем якорные обмотки тормозного генератора и нагрузочного двигателя электрически соединены друг с другом встречно-параллельно, а тормозной генератор выполнен с постоянным возбуждением, ротор нагрузочного двигателя кинематически соединен через второй редуктор с осью вращения несущих колес, силовой выход усилителя напряжения соединен с независимой обмоткой возбуждения нагрузочного двигателя, датчик тока торможения включен в цепь якорных обмоток тормозного генератора и нагрузочного двигателя, датчик тока возбуждения включен в цепь питания независимой обмотки возбуждения нагрузочного двигателя, выход блока вычисления разности подключен к управляющему входу усилителя напряжения, положительный вход блока вычисления разности подключен к первому выходу пульта управления, отрицательный вход блока вычисления разности соединен с выходом системы автоматического управления, выходы датчиков угловых скоростей измерительного и несущих колес и выходы датчиков тока торможения тормозного генератора и тока возбуждения нагрузочного двигателя подключены к четырем входам системы автоматического управления, а ее пятый вход подключен ко второму выходу пульта управления.
2. Устройство по п.1, отличающееся тем, что система автоматического управления содержит последовательно соединенные первый блок вычисления ошибки, делитель, второй блок вычисления ошибки, регулятор скольжения, третий блок вычисления ошибки, регулятор тока торможения тормозного генератора, четвертый блок вычисления ошибки и регулятор тока возбуждения нагрузочного двигателя, выход которого соединен с отрицательным входом блока вычисления разности, отрицательные входы первого, третьего и четвертого блоков вычисления ошибок соединены соответственно с выходами датчика угловой скорости измерительного колеса, датчика тока торможения тормозного генератора и датчика тока возбуждения нагрузочного двигателя, положительный вход первого блока вычисления ошибки и второй вход делителя соединены с выходом датчика угловой скорости несущих колес, а положительный вход второго блока вычисления ошибки соединен со вторым выходом пульта управления.
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ КОЛЕСА С АЭРОДРОМНЫМ ПОКРЫТИЕМ | 2004 |
|
RU2259569C1 |
| Устройство для измерения коэффициента сцепления дорожных покрытий | 1987 |
|
SU1493712A1 |
| Устройство для измерения коэффициента сцепления колеса транспортного средства с дорожным покрытием | 1988 |
|
SU1567917A1 |
| JP 6258196 A, 16.09.1994. | |||

