ОБЛАСТЬ ТЕХНИКИ
Данное изобретение относится к устройству управления и способу управления мобильной транспортировочной установкой для непрерывной транспортировки фрагментированного материала в направлении транспортировки, а также к мобильной транспортировочной установке для непрерывной транспортировки фрагментированного материала в направлении транспортировки.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
Устройства управления для мобильных транспортировочных установок и способы управления такими мобильными транспортировочными установками известны, например, из патентных документов US 2014/0190788 А1, ЕР 2125582 B1, US 4951801 A, US 5246274 A, US 4089403 A, WO 2002/30792 А2, DE 102011105747 А1 или US 2001/0001434 А1. Тем не менее, ведется поиск дальнейших усовершенствований.
Таким образом, целью данного изобретения является создание усовершенствованного устройства управления и усовершенствованного способа управления мобильной транспортировочной установкой для непрерывной транспортировки фрагментированного материала в направлении транспортировки, а также усовершенствованной мобильной транспортировочной установки для непрерывной транспортировки фрагментированного материала в направлении транспортировки. В частности, целью данного изобретения является создание устройства управления и способа управления мобильной транспортировочной установкой для непрерывной транспортировки фрагментированного материала в направлении транспортировки, а также мобильной транспортировочной установки для непрерывной транспортировки фрагментированного материала в направлении транспортировки, которая дает возможность получить более надежное и/или экономически эффективное определение направления движения, и/или перемещение мобильной транспортировочной установки, в частности, в стволах шахт подземной разработки месторождения.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В соответствии с первым аспектом данного изобретения указанная цель достигается путем создания устройства управления, предназначенного для управления мобильной транспортировочной установкой для непрерывной транспортировки фрагментированного материала в направлении транспортировки и содержащего первый блок управления, расположенный в первом транспортном узле мобильной транспортировочной установки и выполненный с возможностью обмена, хранения и обработки данных, а также с возможностью генерации сигнала управления движением для управления движением первого транспортного узла, второй блок управления, расположенный во втором транспортном узле мобильной транспортировочной установки и выполненный с возможностью обмена, хранения и обработки данных, а также с возможностью генерации сигнала управления движением для управления движением второго транспортного узла, причем первый блок управления дополнительно содержит по меньшей мере один первый датчик, расположенный и выполненный с возможностью сканирования по меньшей мере сектора окружающей среды в двух измерениях по существу параллельно направлению транспортировки, в частности, сектора с углом более 90°, предпочтительно 180° или более 180°, например 205°, или в трех измерениях, второй блок управления дополнительно содержит по меньшей мере один второй датчик, расположенный и выполненный с возможностью сканирования по меньшей мере сектора окружающей среды в двух измерениях по существу параллельно направлению транспортировки, в частности, сектора с углом более 90°, предпочтительно 180°, или более 180°, например 205°, или в трех измерениях, причем устройство управления выполнено с возможностью сравнения вторых результатов сканирования, полученных от второго датчика второго блока управления, с первыми результатами сканирования, полученными от первого датчика первого блока управления, причем вторые результаты сканирования получены в положении хода второго транспортного узла, соответствующем положению хода первого транспортного узла, в котором были получены первые результаты сканирования.
Обеспечение блоков управления датчиками дает возможность получить надежное и/или экономически эффективное определение направления движения и/или перемещение мобильной транспортировочной установки, в частности в шахтном стволе подземной разработки месторождения. Например, результаты сканирования могут быть использованы для определения расстояний, например между транспортными узлами и/или между транспортным узлом и окружающей его средой, и/или расстояний, пройденных в шахтном стволе. Сравнение результатов сканирования дает возможность осуществить текущий контроль, регулирование и/или корректировку направления движения и/или управление направлением движения, и/или движением одного или более транспортных узлов и/или всей мобильной транспортировочной установки. Поскольку сравнение осуществляется на основании результатов сканирования первого и второго датчиков, полученных по существу в одном и том же местоположении, то обнаружение отсутствия различий или отклонений в результатах сканирования или различий ниже заданного порогового значения указывает на то, что второй блок управления и/или транспортный узел следуют по пути первого блока управления и/или транспортного узла. Обнаружение различий или отклонений, в частности различий выше заданного порогового значения между результатами сканирования указывает на то, что второй блок управления и/или транспортный узел отклоняются от пути первого блока управления и/или транспортного узла. Эта информация является полезной для оценки условия достаточно значительного отклонения или его отсутствия, чтобы внести изменения, в частности, в сигналы управления движением второго блока управления и/или транспортного узла, для возврата второго блока управления и/или транспортного узла обратно на путь, предварительно заданный первым блоком управления и/или транспортным узлом.
Применительно к данному документу термин «местоположение» можно трактовать, в частности, как положение хода, предпочтительно относительно пройденного расстояния в шахтном стволе подземной разработки месторождения. Местоположение, в частности положение хода, предпочтительно определяется с учетом скорости хода транспортного узла, и/или времени хода транспортного узла и/или пройденного расстояния вдоль траектории хода.
В частности, сравнение первых и вторых результатов сканирования, полученных в соответствующих положениях хода первого и второго транспортных узлов, предпочтительно основано на следующем понимании. В то время как мобильная транспортировочная установка двигается в шахтном стволе, транспортные узлы перемещаются по траектории хода. Пройденное расстояние вдоль этой траектории можно рассматривать как положение хода. Пройденное расстояние и/или положение хода могут быть определены или выведены, например, из времени хода и скорости хода транспортного узла. Первый транспортный узел в первый момент получает первые результаты сканирования окружающей среды. Этот первый момент (например, на расстоянии 50 м в шахтном стволе), когда первый транспортный узел получает первые результаты сканирования, соответствует конкретному положению хода этого первого транспортного узла, определяемому, например, пройденным расстоянием и/или временем хода и/или скоростью хода. Когда первый транспортный узел продвигается дальше в шахтном стволе, то второй транспортный узел также следует дальше в шахтном стволе. Когда второй транспортный узел достигает положения хода, соответствующего положению хода, в котором первый транспортный узел получил первые результаты сканирования (в вышеприведенном примере, это будет момент, когда второй транспортный узел продвинулся на 50 м в шахтном стволе), то второй транспортный узел получает вторые результаты сканирования. Затем эти первые и вторые результаты сканирования сравниваются. Если определяется отсутствие отклонения в местоположении первого и второго транспортных узлов, т.е. когда результаты сканирования соответствуют друг другу, то это может указывать на ситуацию, в которой второй транспортный узел точно следует по пути первого транспортного узла. Однако когда первые и вторые результаты сканирования отличаются друг от друга, то это может указывать на ситуацию, когда второй транспортный узел отклонился от пути первого транспортного узла, например, второй транспортный узел сместился к левой или правой стороне в большей степени, чем первый транспортный узел. Если выявляется такое отклонение, то могут быть определены сигналы управления движением, чтобы скорректировать отклонение при следующем передвижении второго транспортного узла.
Предпочтительно первый и/или второй блок управления со держит/со держат два датчика, которые дополнительно предпочтительно расположены на противоположных сторонах, соответственно, первого и/или второго блока управления, и/или первого и/или второго транспортного узла.
Первые и/или вторые датчики могут быть 2D и/или 3D сканерами, в частности лазерными сканерами, но возможны варианты. Предпочтительно первые и/или вторые датчики расположены так, что окружающая среда может быть просканирована по существу в горизонтальном направлении или так, что результаты сканирования содержат по меньшей мере сектор окружающей среды по существу в горизонтальном направлении.
Первый транспортный узел предпочтительно является загрузочным узлом. Второй транспортный узел предпочтительно является разгрузочным узлом.
Предпочтительно устройство управления выполнено с возможностью выведения информации о местоположении и/или сигнала коррекции местоположения из результата сравнения.
Кроме того, предпочтительно первый блок управления и/или второй блок управления могут быть расположены и выполнены по существу с возможностью автономного управления и/или определения направления движения. В частности, первый блок управления и/или второй блок управления могут быть расположены и выполнены по существу с возможностью выведения сигналов управления движением на основании предпочтительно принятой и/или сохраненной информации в отношении окружающей среды и/или в отношении двумерной и/или трехмерной карты, например места разработки месторождения, в частности ствола (стволов) шахты, и/или в отношении заданной и/или запланированной, предпочтительно принятой и/или сохраненной траектории для мобильной транспортировочной установки. По существу автономное управление направлением движения и/или определение направления движения с помощью первого блока управления и/или второго блока управления имеет преимущество, заключающееся в том, что управление и/или определение направлении движения мобильной транспортировочной установки в шахтный ствол и/или из шахтного ствола предпочтительно может быть выполнено без ввода информации и/или контроля со стороны (человека) оператора.
В типичном случае предложенное устройство управления используется для управления мобильной транспортировочной установкой. Такая мобильная транспортировочная установка с предложенным устройством управления удовлетворяет требованию транспортировки подземной руды таким образом, чтобы повысить эффективность процесса добычи благодаря максимизации использования врубовой машины. Предпочтительно это означает исключение ожидания системы нерегулярной эвакуации сырья, такой как челночная вагонетка (для доставки партиями).
Мобильная транспортировочная установка с устройством управления по данному изобретению предпочтительно служит в качестве непрерывного соединения между средствами, такими как врубовые машины, дробилки-питатели или прямая загрузка при буровзрывных работах и подземный закрепленный конвейер. Закрепленный конвейер на площадке шахты может быть, например, главным конвейером, шахтным магистральным конвейером или штрековым конвейером.
Предложенная мобильная транспортировочная установка с устройством управления предпочтительно следует за врубовой машиной на протяжении всего процесса добычи. Во время этого процесса добычи врубовая машина поставляет фрагментированный материал в мобильную транспортировочную установку, в частности, в загрузочный узел мобильной транспортировочной установки. Из мобильной транспортировочной установки, в частности, из разгрузочного узла мобильной транспортировочной установки фрагментированный материал будет загружаться на конвейер, закрепленный на площадке шахты, который может быть, например, главным конвейером, шахтным магистральным конвейером или штрековым конвейером.
Предпочтительно мобильная транспортировочная установка содержит загрузочный узел, разгрузочный узел, один или несколько гусеничных блоков, один или несколько колесных блоков, транспортирующий элемент для транспортировки фрагментов материала, например ленту закрытого ленточного или бункерного конвейера, и опорную конструкцию, предпочтительно соединяющую различные узлы. Предпочтительно загрузочный узел будет находиться спереди, а разгрузочный узел будет находиться в конце мобильной транспортировочной установки относительно направления транспортировки.
Кроме того, предпочтительно вся мобильная транспортировочная установка или по меньшей мере большая ее часть является модульной. В зависимости от применения в шахте мобильная транспортировочная установка может быть выполнена модульной по длине, а также на модулях с приводом, в частности, гусеничных блоках, и модулях без привода, в частности, колесных блоках.
В другом предпочтительном варианте выполнения сигнал управления движением содержит целевое местоположение и/или целевую скорость и/или текущую скорость и/или сигнал ускорения и/или сигнал торможения, и/или сигнал, указывающий на изменение направления, и/или сигнал управления движением на привод для гусеничной цепи транспортного узла, выполненного в виде гусеничного блока, и/или сигнал для выдвижения или втягивания рулевого цилиндра транспортного узла, и/или гидравлического цилиндра опорной конструкции конвейера.
В соответствии с другим предпочтительным вариантом выполнения по меньшей мере один дополнительный блок управления расположен в дополнительном транспортном узле мобильной транспортировочной установки и выполнен с возможностью обмена, хранения и обработки данных, а также генерации сигнала управления движением для управления движением дополнительного транспортного узла. В частности, предпочтительно второй и/или дополнительный блок управления выполнен с возможностью приема данных от первого блока управления или предыдущего блока управления, и/или выполнен с возможностью передачи данных для последующего блока управления, причем эти данные предпочтительно содержат информацию о расстоянии от второго блока управления, предпочтительно разгрузочного узла.
По меньшей мере один дополнительный транспортный узел может быть выполнен, в частности, в виде колесного блока или гусеничного блока. Предпочтительно множество дополнительных блоков управления расположено во множестве дополнительных транспортных узлов. В этом случае предпочтительно некоторые из дополнительных транспортных узлов являются колесными блоками, а другие дополнительные транспортные узлы являются гусеничными блоками. В частности, предпочтительно между двумя гусеничными блоками расположены один, два, три или более колесных блоков. Предпочтительно детали, рассмотренные в данном документе в отношении дополнительного блока управления и/или дополнительного транспортного узла, применимы, соответственно, к множеству дополнительных блоков управления и/или множеству дополнительных транспортных узлов.
Особенно предпочтительно дополнительный блок управления дополнительно содержит по меньшей мере один дополнительный датчик, расположенный и выполненный с возможностью сканирования по меньшей мере сектора окружающей среды в двух измерениях по существу параллельно направлению транспортировки, в частности сектора с углом более 90°, предпочтительно сектора 180° или более 180°, например 205°, или в трех измерениях. Дополнительно предпочтительно устройство управления выполнено с возможностью сравнения вторых результатов сканирования, полученных от дополнительного датчика дополнительного блока управления, с первыми результатами сканирования, полученными от первого датчика первого блока управления, и/или со вторыми результатами сканирования, полученными от второго датчика второго блока управления. Причем дополнительные результаты сканирования получают в таком положении хода дополнительного транспортного узла, которое соответствует положению хода первого транспортного узла, в котором были получены первые результаты сканирования, и/или положению хода второго транспортного узла, в котором были получены вторые результаты сканирования.
В соответствии с другим предпочтительным вариантом выполнения первый блок управления, и/или второй блок управления, и/или дополнительный блок управления содержит по меньшей мере один первый, и/или второй, и/или дополнительный датчик, расположенный и выполненный с возможностью сканирования по меньшей мере сектора окружающей среды по существу перпендикулярно направлению транспортировки, предпочтительно по меньшей мере сектора выше горизонтальной плоскости, в частности, сектора с углом более 90°, или более 180°, или более 180°, например 205°, в двух или в трех измерениях.
Предпочтительно первый, и/или второй, и/или дополнительный блок управления содержит два датчика, дополнительно предпочтительно расположенные на противоположных сторонах, соответственно, первого и/или второго блока управления и/или первого, и/или второго транспортного узла. Первый и/или второй датчики, и/или дополнительный могут быть 2D и/или 3D сканерами, в частности лазерными сканерами, но возможны варианты. Предпочтительно первые и/или вторые датчики и/или дополнительные датчики расположены так, что окружающая среда может быть просканирована по существу в вертикальном направлении или так, что результаты сканирования содержат по меньшей мере сектор окружающей среды по существу в вертикальном направлении. Предпочтительнее сканирование окружающей среды охватывает по меньшей мере часть кровли или потолка шахтного ствола. Это обусловлено тем, что потолок шахтного ствола обычно менее загражден и/или менее подвержен изменениям формы и/или профиля, чем стены или подстилающая порода и/или почва шахтного ствола.
Предпочтительным вариантом может быть устройство управления, в котором первый блок управления содержит два датчика, один для сканирования окружающей среды по существу в горизонтальном направлении, а другой для сканирования окружающей среды по существу в вертикальном направлении, при этом первый транспортный узел предпочтительно является загрузочным узлом. В этом варианте предпочтительным может быть то, что второй блок управления и/или некоторые или все дополнительные блоки управления содержат лишь один датчик для сканирования окружающей среды по существу в горизонтальном направлении.
Другим предпочтительным вариантом может быть устройство управления, в котором оба блока управления, первый и второй, содержат два датчика, один для сканирования окружающей среды по существу в горизонтальном направлении, а другой для сканирования окружающей среды по существу в вертикальном направлении, при этом первый транспортный узел предпочтительно является загрузочным узлом, а второй узел предпочтительно является разгрузочным узлом. В этом варианте предпочтительным может быть то, что некоторые или все дополнительные блоки управления, расположенные между первым и вторым блоками управления, содержат лишь один датчик для сканирования окружающей среды по существу в горизонтальном направлении.
Дополнительно предпочтительно устройство управления выполнено с возможностью сравнения вторых результатов сканирования, полученных от второго датчика второго блока управления, с первыми результатами сканирования, полученными от первого датчика первого блока управления, при этом вторые результаты сканирования получают в положении хода второго транспортного узла, соответствующем положению хода первого транспортного узла, в котором были получены первые результаты сканирования.
Дополнительно предпочтительно устройство управления выполнено с возможностью сравнения вторых результатов сканирования, полученных от дополнительного датчика дополнительного блока управления, с первыми результатами сканирования, полученными от первого датчика первого блока управления, и/или со вторыми результатами сканирования, полученными от второго датчика второго блока управления. При этом дополнительные результаты сканирования получают в положении хода дополнительного транспортного узла, соответствующем положению хода первого транспортного узла, в котором были получены первые результаты сканирования, и/или положению хода второго транспортного узла, в котором были получены вторые результаты сканирования.
В другом предпочтительном варианте выполнения первый датчик, и/или второй датчик, и/или дополнительный датчик расположены под углом по существу к горизонтальной плоскости и/или по существу к вертикальной плоскости. Преимущество расположения под углом первого датчика, и/или второго датчика, и/или дополнительного датчика заключается в том, что в принципе даже при 2D сканере результаты сканирования могут охватывать по меньшей мере сектор окружающей среды по существу в горизонтальном направлении, а также по существу в вертикальном направлении. Например, когда датчики расположены под углом 45° по существу к горизонтальной и/или вертикальной плоскости, то даже при 2D сканере результаты сканирования будут охватывать окружающую среду в горизонтальном направлении, а также в вертикальном направлении благодаря расположению под углом. Под расположением под углом по существу к горизонтальной и/или вертикальной плоскости, в частности, понимаются углы, отличные от углов 0°, 360°, 90° или 0°. В частности, расположение под углом по существу к горизонтальной и/или вертикальной плоскости может включать углы между 30° и 60°, например угол в 45°.
В соответствии с предпочтительным вариантом выполнения первый блок управления выполнен с возможностью приема данных от пользовательского интерфейса и/или от предыдущего устройства, в частности от врубовой машины, в частности данных об управлении движением для направления вдоль траектории движения, и/или второй блок управления выполнен с возможностью приема данных от пользовательского интерфейса и/или от другого устройства, в частности данных об управлении движением для направления вдоль траектории движения.
Этот вариант выполнения, в частности, является особенно предпочтительным для управления направлением движения первого блока управления, который предпочтительно расположен в загрузочном узле, в шахтный ствол подземной разработки. Пользовательский интерфейс предпочтительно может быть использован для приема входных данных от пользователя, например (человека) оператора. Например, благодаря приему данных от пользовательского интерфейса пользователь может направлять первый блок управления в шахтный ствол и вдоль него. Дополнительно или, как вариант, первый блок управления может принимать данные от предыдущего средства, например от врубовой машины. В этом случае дополнительно предпочтительным является то, что первый блок управления может следовать за предыдущим средством вдоль его пути, в частности, в шахтный ствол и вдоль него. Для приема данных от такого предыдущего средства может быть использовано средство связи, выполненное с возможностью такого обмена данными.
Получение данных от пользовательского интерфейса и/или от предыдущего, и/или другого средства может быть использовано в дополнение или, как вариант, по существу для автономного управления направлением движения и/или определения направления движения, как изложено выше. Такие решения могут быть особенно полезными при управлении движением и/или определении направления движения мобильной транспортировочной установки в шахтный ствол и/или из него вдоль траектории движения.
Предпочтительно управление мобильной транспортировочной установкой выполняют или один, или два оператора в зависимости от режима ее эксплуатации. Предпочтительно средства связи, такие, как мобильные пульты управления, расположены в каждом конце мобильной транспортировочной установки, предпочтительно в загрузочном узле и/или в разгрузочном узле, чтобы дать возможность оператору/операторам управлять мобильной транспортировочной установкой. Предпочтительно средства управления являются дистанционно управляемыми средствами (они могут быть дистанционно управляемыми или по радиоканалу или по кабельной связи).
Предпочтительно устройство управления выполнено с возможностью управления мобильной транспортировочной установкой в различных режимах эксплуатации. Перемещение мобильной транспортировочной установки применительно к данному документу также может рассматриваться как откатка. Краткое резюме примеров этих различных предпочтительных режимов приведено ниже.
1. Рабочий режим
В рабочем режиме скорость откатки ограничена заданной максимальной скоростью (предпочтительно максимальной величиной в 10 м/мин или 20 м/мин). Оператор расположен на передней стороне близко к загрузочному узлу. Из этого местоположения оператор может определить место переноса материала и может направить мобильную транспортировочную установку через шахту, чтобы следовать за врубовой машиной, или приводить мобильную транспортировочную установку к местоположению загрузки материала. Обратная откатка: при обратной откатке скорость откатки ограничена заданной максимальной скоростью (предпочтительно максимальной величиной в 10 м/мин) при скорости обратного хода. Оператор расположен на передней стороне близко к загрузочному узлу. Поскольку мобильная транспортировочная установка содержит сохраненный путь, то она будет следовать по тому же пути обратно задним ходом, по которому она уже прошла, при этом не требуется никакого управления.
- При эксплуатации конвейера.
- Предпочтительно это является обычным режимом работы мобильной транспортировочной установки.
2. Быстрая обратная откатка
- При быстрой обратной откатке скорость откатки ограничена заданной максимальной скоростью (предпочтительно максимальной величиной в 20 м/мин) при скорости обратного хода.
- Для приведения в действие с большой скоростью требуются два оператора (по одному на каждом конце).
- При этом конвейерный элемент, в частности закрытая лента конвейера не работает.
3. Режим технического обслуживания
- Режим технического обслуживания это работа конвейера вне последовательности.
- Режим технического обслуживания включает ручную переустановку гусеничных и/или колесных блоков, и/или рулевых цилиндров.
4. Удлинение ленты конвейера
- Мобильная транспортировочная установка и установленный на почве приемный конвейер продвигаются вместе в виде одного блока.
5. Перебазирование
- Скорость быстрой откатки передним/задним ходом предпочтительно с максимальной величиной в 20 м/мин требует наличия двух операторов (по одному на каждом конце) для приведения в действие.
Под перебазированием понимается переброска мобильной транспортировочной установки из одного участка горных работ в другой участок горных работ.
- При этом конвейерный элемент, в частности лента закрытого ленточного конвейера, отключен.
- Автоматическое выравнивание отключено.
Предпочтительно устройство управления действует в качестве системы управления и определения направления движения, которая также может называться «системой наведения», чтобы поддерживать правильное положение мобильной транспортировочной установки, соответственно, в пределах штрека или пути в шахтном стволе. Например, устройство управления может отвечать за регулирование электромагнитных пропорциональных клапанов для гусеничной цепи гусеничных блоков и рулевых цилиндров опорной конструкции, соединяющей различные узлы.
Например, устройство управления предпочтительно управляет мобильной транспортировочной установкой в нижеследующих режимах.
- Следование за лидером. Этот режим является предпочтительным в случаях, когда колесные блоки и гусеничные блоки должны следовать по пути, пройденному загрузочным узлом в пределах штрека в заданном диапазоне, например в диапазоне ±500 мм (при этом, величина максимального отклонения составляет, например 750 мм). Местоположение на штреке загрузочного узла сохраняют и используют в качестве отсчета для прицепных блоков, например колесных и гусеничных блоков, как в направлении рабочего хода, так и в направлении обратного хода.
- Перемещение вслепую. Этот режим является предпочтительным в случаях, когда местоположение загрузочного узла по какой-либо причине является неизвестным. Тогда колесные блоки и гусеничные блоки следуют по центру (или с заданным смещением) штрека до ±500 мм (при этом, величина максимального отклонения составляет, например 750 мм).
Для того чтобы устройство управления обеспечивало правильное управление мобильной транспортировочной установкой предпочтительными являются следующие решения.
- Местоположение одного гусеничного блока или колесного блока определяется с использованием сканеров местоположения.
- Местоположение разгрузочного узла определяется посредством наружных отсчетных меток, сканируемых бортовым лазерным сканером.
- Угол сочленения каждого из рулевых цилиндров определяется с использованием линейного преобразователя в рулевых цилиндрах. Предпочтительно, а также из-за деформации опорной конструкции и результирующих допусков может быть установлено независимое измерительное средство, предпочтительно лазерный сканер и система камер, на различных блоках на определенном расстоянии для повышения надежности и точности. Таким образом, может быть получена высокая степень информации о местоположении в шахтном туннеле и местоположении соседнего узла относительно установленного узла.
Дополнительно предпочтительно величина выступающей части (или перекрытия - измерение длины или расстояния) мобильной транспортировочной установки от принимающего конвейера может быть измерена, которая, как известно, всегда во время работы находится в пределах ±500 мм (при этом, величина максимального отклонения составляет, например 750 мм). Это измерение и определение может быть выполнено подходящим датчиком. Подходящий датчик может быть, например, лазерным сканером расстояния, ультразвуковым датчиком, 2D лазерным сканером или 3D лазерным сканером, отображающим окружающую среду и измеряющим скорость и расстояние от начального местоположения. Эти данные будут занесены в базу данных.
Предпочтительно информация, полученная от датчиков (предпочтительно системы камер сканера местоположения и смещения рулевого цилиндра), может быть использована для восстановления «формы» мобильной транспортировочной установки, например благодаря формированию воображаемой линии выше мобильной транспортировочной установки.
Датчики устройства управления предпочтительно служат для определения направления движения. Предпочтительно на первом узле и на последнем узле мобильной транспортировочной установки с каждой стороны установлены два или более датчиков, предпочтительно лазерных сканеров. Предпочтительно сканирование будет выполняться вертикально и горизонтально для сканирования целика почвы и кровли. Предпочтительно между первым узлом и вторым узлом установлены дополнительные датчики, которые предпочтительно разнесены на равные промежутки (например, через каждые 25 м, при этом величина 25 м является расстоянием между двумя датчиками). Предпочтительно датчики будут установлены попарно (один датчик слева, а второй справа на узле). Дополнительно, предпочтительно сканирование будет выполняться вертикально и/или горизонтально в зависимости от местоположения установки. Предпочтительно могут быть отсканированы части целика почвы и кровли. Кровля шахтного ствола является особенно предпочтительной, поскольку во время подземной разработки месторождения ее изменение является менее вероятным. Также может быть использована почва шахтного ствола, однако при этом существует опасность ее перекрытия по меньшей мере частично, например, она может быть использована для хранения расходных материалов, для парковки подземных транспортных средств и т.д. Целик шахтного ствола может быть непрерывным и также может быть использован в качестве точки отсчета. Однако датчики должны быть выполнены с возможностью игнорирования переходов, людей и других исключений. Например, целики шахтного ствола могут неоднократно прерываться, в частности, при камерно-столбовой разработке.
Например, первый опорный узел, предпочтительно загрузочный узел может быть управляемым и направляемым оператором.
Предпочтительно датчик на первом узле, в частности на загрузочном узле, будет сканировать или отображать окружающую среду и определять местоположение первого узла на штреке на конкретном расстоянии откатки или положение хода в смысле пройденного расстояния. Предпочтительно эти данные будут зарегистрированы или сохранены.
Кроме того, предпочтительно местоположение загрузочного узла на штреке будет регистрироваться или сохраняться через равные промежутки времени продвижения от приемного конвейера. Когда следующий транспортный узел с датчиком, предпочтительно бортовым сканером, приближается к этому местоположению, то блок управления этого следующего транспортного узла осуществляет перекрестную проверку фактического местоположения в сравнении с предыдущим измеренным местоположением первого узла, предпочтительно загрузочного узла, которое должно быть целевым местоположением. Затем предпочтительно выполнить вычисление погрешности в местоположении транспортного узла на основании текущего фактического местоположения и зарегистрированного местоположения загрузочного узла. Затем предпочтительно выполнить вычисление требуемого регулирования транспортных узлов, которое затем может быть реализовано в виде сигналов управления движением с использованием сочетания логики скорости гусеничной цепи и логики рулевого цилиндра.
Предпочтительно все необходимые регулировки выполняются, когда мобильная транспортировочная установка затем продвигается вперед или назад.
Предпочтительно опорная конструкция обеспечивает соединение между транспортными узлами, в частности между загрузочным узлом, гусеничными блоками, колесными блоками и разгрузочным узлом. Предпочтительно опорная конструкция является каркасной конструкцией и, кроме того, предпочтительно содержит три части или сегмента. Средний сегмент предпочтительно может поворачиваться по горизонтали. Предпочтительно горизонтальные перемещения сегментов опорной конструкции регулируются цилиндрами. Предпочтительно благодаря измерению хода цилиндра можно вычислить местоположение и угол опорных блоков относительно друг друга.
Предпочтительно передний концевой сегмент может поворачиваться по вертикали, чтобы дать возможность обеспечить вертикальную компенсацию между опорными конструкциями. Задний концевой сегмент предпочтительно содержит универсальный шарнир для компенсации закручивания между смежными конструкциями.
В другом предпочтительно варианте выполнения второй блок управления и/или дополнительный блок управления выполнены с возможностью обмена данными с первым блоком управления, при этом второй блок управления и/или дополнительный блок управления выполнены с возможностью оценки и/или определения и/или получения команды сканирования, содержащей, в частности, следующий момент времени (дельта Т) и/или следующий шаг расстояния, для выполнения сканирования окружающей среды, при этом второй блок управления и/или дополнительный блок управления выполнены с возможностью сканирования окружающей среды в соответствии с командой сканирования, при этом второй блок управления и/или дополнительный блок управления выполнены с возможностью обработки результатов сканирования.
Применительно к данному документу обмен данными между блоками управления может включать данные о профиле, в частности данные о профиле окружающей среды. Команда сканирования может относиться к команде датчику сканировать окружающую среду, в частности для получения данных, таких как данные о профиле.
Обработка результатов сканирования предпочтительно включает определение условия нахождения или отсутствия второго блока управления и/или дополнительного блока управления в их целевых местоположениях и, возможно, кроме того, предпочтительно определение корректирующих сигналов управления движением, при необходимости.
Другой предпочтительный вариант выполнения устройства управления содержит базовую станцию, расположенную и выполненную с возможностью передачи сигнала позиционирования в первый блок управления, и/или во второй блок управления, и/или в дополнительный блок управления, и/или приема сигнала позиционирования из первого блока управления, и/или из второго блока управления, и/или из дополнительного блока управления, чтобы определить местоположение первого блока управления, и/или второго блока управления, и/или дополнительного блока управления.
Предпочтительно информация и/или сигналы, относящиеся к местоположению, могут содержать информацию о положении хода, о пройденном расстоянии. Кроме того, этот вариант выполнения может служить для проведения поверки блоков управления и/или транспортных узлов относительно информации о местоположении. Преимущественно точное местоположение базовой станции является известным. Предпочтительно блоки управления передают и/или принимают сигнал о местоположении в базовую станцию или из нее, чтобы определить их точное местоположение, например положение хода, и/или поверку их местоположения в качестве основания для дальнейшего определения будущих местоположений по отношению к ним. Базовая станция может содержать фотоэлектрический барьер и/или бесконтактный датчик, и/или сигнализатор условия прохождения. В частности, особый интерес представляет местоположение относительно положения хода и/или пройденного расстояния вдоль траектории хода. Предпочтительно базовая станция может быть расположена и выполнена с возможностью передачи сигнала скорости в блоки управления и/или приема сигнала скорости из блоков управления для определения скорости блоков управления.
В соответствии с другим предпочтительным вариантом выполнения устройство управления, в частности, первый блок управления и/или второй блок управления, и/или дополнительный блок управления, выполнены с возможностью определения и предпочтительно хранения, и/или обработки данных относительно местоположения и/или скорости, и/или ускорения, и/или торможения, и/или изменения направления, и/или выдвижения или втягивания рулевого цилиндра транспортного узла, и/или гидравлического цилиндра опорной конструкции конвейера, и/или выполнено с возможностью определения и предпочтительно хранения, и/или обработки, и/или выдачи текущего местоположения первого блока управления, и/или второго блока управления, и/или дополнительного блока управления на основании определенных местоположения и данных. Например, этот вариант выполнения может давать возможность определения и/или сохранения местоположения в определенный момент времени, например, текущего местоположения некоторых или всех блоков управления, и/или некоторых или всех транспортных узлов, и/или частей или всей мобильной транспортировочной установки. Это определение при хранении может быть использовано, например, для управления направлением движения мобильной транспортировочной установки из шахтного ствола по пути, соответствующему пути, по которому мобильная транспортировочная установка прошла в шахтный ствол.
В соответствии с другим аспектом данного изобретения цель достигается путем создания мобильной транспортировочной установки для непрерывной транспортировки фрагментированного материала в направлении транспортировки, причем транспортировочная установка содержит загрузочный узел, содержащий узел для переноса материала, предназначенный для приема фрагментированного материала и содержащий конструкцию для переноса материала, расположенную в транспортном узле, разгрузочный узел, содержащий узел для переноса материала, предназначенный для разгрузки фрагментированного материала и содержащий конструкцию для переноса материала, расположенную в транспортном узле, конвейерный элемент для транспортировки фрагментированного материала, в частности ленту закрытого ленточного или бункерного конвейера, и устройство управления, описанное в данном документе. Предпочтительно первый блок управления расположен в загрузочном узле, а второй блок управления расположен в разгрузочном узле. Кроме того, предпочтительно мобильная транспортировочная установка дополнительно содержит по меньшей мере один дополнительный транспортный узел, расположенный между загрузочным узлом и разгрузочным узлом, при этом дополнительно предпочтительно по меньшей мере один дополнительный блок управления расположен по меньшей мере в одном дополнительном транспортном узле.
В соответствии с другим аспектом данного изобретения цель достигается путем создания способа управления мобильной транспортировочной установкой для непрерывной транспортировки фрагментированного материала в направлении транспортировки, рассмотренной в данном документе, причем данный способ включает обеспечение наличия мобильной транспортировочной установки, рассмотренной в данном документе, сканирование по меньшей мере сектора окружающей среды в двух измерениях по существу параллельно направлению транспортировки, в частности, сектора с углом более 90°, предпочтительно 180° или более 180°, например 205°, или в трех измерениях с использованием первого датчика, расположенного в первом транспортном узле, сканирование по меньшей мере сектора окружающей среды в двух измерениях по существу параллельно направлению транспортировки, в частности, сектора с углом более 90°, предпочтительно 180° или более 180°, например 205° или в трех измерениях с использованием второго датчика, расположенного во втором транспортном узле, сравнение вторых результатов сканирования, полученных от второго датчика второго блока управления, с первыми результатами сканирования, полученными от первого датчика первого блока управления, при этом вторые результаты сканирования получают в положении хода второго транспортного узла, соответствующем положению хода первого транспортного узла, в котором были получены первые результаты сканирования.
Предпочтительно способ дополнительно включает сканирование по меньшей мере сектора окружающей среды в двух измерениях по существу параллельно направлению транспортировки, в частности, сектора с углом более 90°, предпочтительно 180° или более 180°, например 205°, или в трех измерениях с использованием по меньшей мере дополнительного датчика, расположенного по меньшей мере в одном дополнительном транспортном узле.
В предпочтительном варианте выполнения способа вторые результаты сканирования, полученные от дополнительного датчика дополнительного блока управления, сравнивают с первыми результатами сканирования, полученными от первого датчика первого блока управления, и/или со вторыми результатами сканирования, полученными от второго датчика второго блока управления, при этом дополнительные результаты сканирования получают в положении хода дополнительного транспортного узла, соответствующем положению хода первого транспортного узла, в котором были получены первые результаты сканирования, и/или положению хода второго транспортного узла, в котором были получены вторые результаты сканирования.
В частности, предпочтительно способ включает выведение информации о местоположении и/или сигнала коррекции местоположения из результата сравнения.
В соответствии с другим предпочтительным вариантом выполнения способ включает генерацию сигнала управления движением, включает создание целевого местоположения и/или целевой скорости, и/или текущего местоположения, и/или сигнала ускорения, и/или сигнала торможения, и/или сигнала, указывающего на изменение направления, и/или сигнала управления движением на привод для гусеничной цепи транспортного узла, выполненного в виде гусеничного блока, и/или сигнала для выдвижения или втягивания рулевого цилиндра транспортного узла и/или гидравлического цилиндра опорной конструкции конвейера.
Предпочтительно данный способ включает обмен данными между первым блоком управления и/или вторым блоком управления, и/или по меньшей мере одним дополнительным блоком управления, и генерацию сигнала управления движением для управления движением первого блока управления и/или второго блока управления, и/или по меньшей мере одного дополнительного блока управления в соответствии с сигналом управления движением. В частности, предпочтительно второй и/или дополнительный блок управления принимает данные из первого блока управления и/или предыдущего блока управления или передает данные в следующий блок управления, причем данные предпочтительно содержат информацию о расстоянии от второго блока управления, предпочтительно разгрузочного узла.
В соответствии с другим предпочтительным вариантом выполнения данный способ включает сканирование по меньшей мере сектора окружающей среды перпендикулярно направлению транспортировки, предпочтительно по меньшей мере сектора выше горизонтальной плоскости, в частности, сектора с углом более 90°, или более 180°, или более 180°, например 205°, при этом по меньшей мере один датчик расположен в первом блоке управления и/или втором блоке управления и/или в дополнительном блоке управления. Кроме того, предпочтительно вторые результаты сканирования, полученные от второго и/или дополнительного датчика второго и/или дополнительного блока управления, сравнивают с первыми результатами сканирования, полученными от первого датчика первого блока управления, и/или со вторыми результатами сканирования от второго датчика второго блока управления, при этом вторые и/или дополнительные результаты сканирования получают в положении хода дополнительного транспортного узла, соответствующем положению хода первого транспортного узла, в котором были получены первые результаты сканирования, и/или положению хода второго транспортного узла, в котором были получены вторые результаты сканирования. В частности, предпочтительно способ включает выведение информации о местоположении и/или сигнала коррекции местоположения из результата сравнения.
Предпочтительно данный способ включает прием данных от пользовательского интерфейса и/или от предыдущего устройства, в частности от врубовой машины, в частности данных об управлении движением для направления вдоль траектории хода.
Дополнительно предпочтительно данный способ включает управление загрузочным узлом в соответствии с сигналом управления движением, созданным при вводе с пользовательского интерфейса первого блока управления.
В соответствии с предпочтительным вариантом выполнения способа второй блок управления и/или дополнительный блок управления обмениваются данными с первым блоком управления, второй блок управления и/или дополнительный блок управления оценивают и/или определяют и/или принимают команду сканирования, содержащую, в частности, следующий момент времени (дельта Т) и/или следующий шаг расстояния, для выполнения сканирования окружающей среды, при этом второй блок управления и/или дополнительный блок управления выполняют сканирование окружающей среды в соответствии с командой сканирования, при этом второй блок управления и/или дополнительный блок управления обрабатывают результаты сканирования.
Предпочтительно данный способ включает определение местоположения первого блока управления, и/или второго блока управления, и/или по меньшей мере одного дополнительного блока управления в базовой станции.
В соответствии с другим вариантом выполнения данный способ предпочтительно включает определение и предпочтительно сохранение и/или обработку данных относительно местоположения, и/или скорости, и/или ускорения, и/или торможения, и/или изменения направления, и/или выдвижения или втягивания рулевого цилиндра транспортного узла и/или гидравлического цилиндра опорной конструкции конвейера, и/или определение и предпочтительно сохранение и/или обработку и/или выдачу соответствующего текущего местоположения первого блока управления, и/или второго блока управления, и/или по меньшей мере дополнительного блока управления на основании определенных местоположения и данных.
Что касается преимуществ, предпочтительных вариантов выполнения и деталей этих других аспектов и предпочтительных вариантов выполнения, то они аналогичны преимуществам, предпочтительным вариантам выполнения и деталям соответствующих аспектов и вариантов выполнения, рассмотренных выше.
Ниже приведено описание предпочтительных вариантов выполнения со ссылкой на сопроводительные чертежи, на которых
фиг. 1 показывает вид в аксонометрии мобильной транспортировочной установки,
фиг. 2 показывает вид в аксонометрии мобильной транспортировочной установки, расположенной прямолинейно,
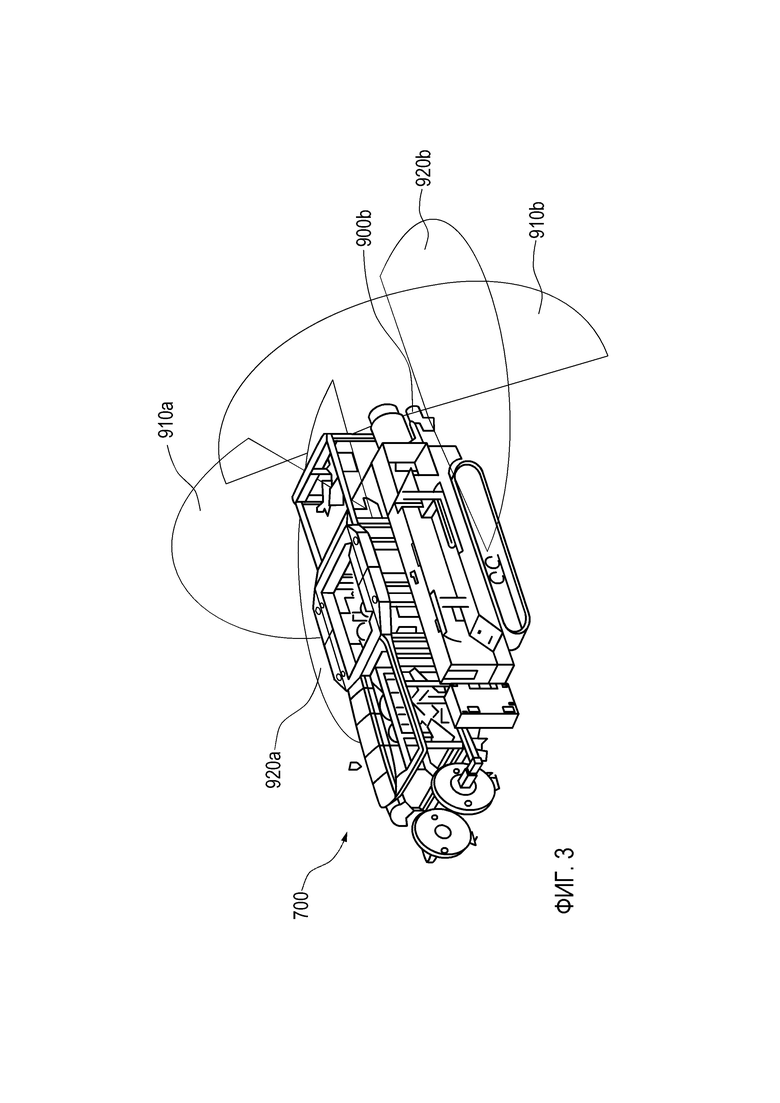
фиг. 3 показывает вид в аксонометрии загрузочного узла с углами горизонтального и вертикального сканирования,
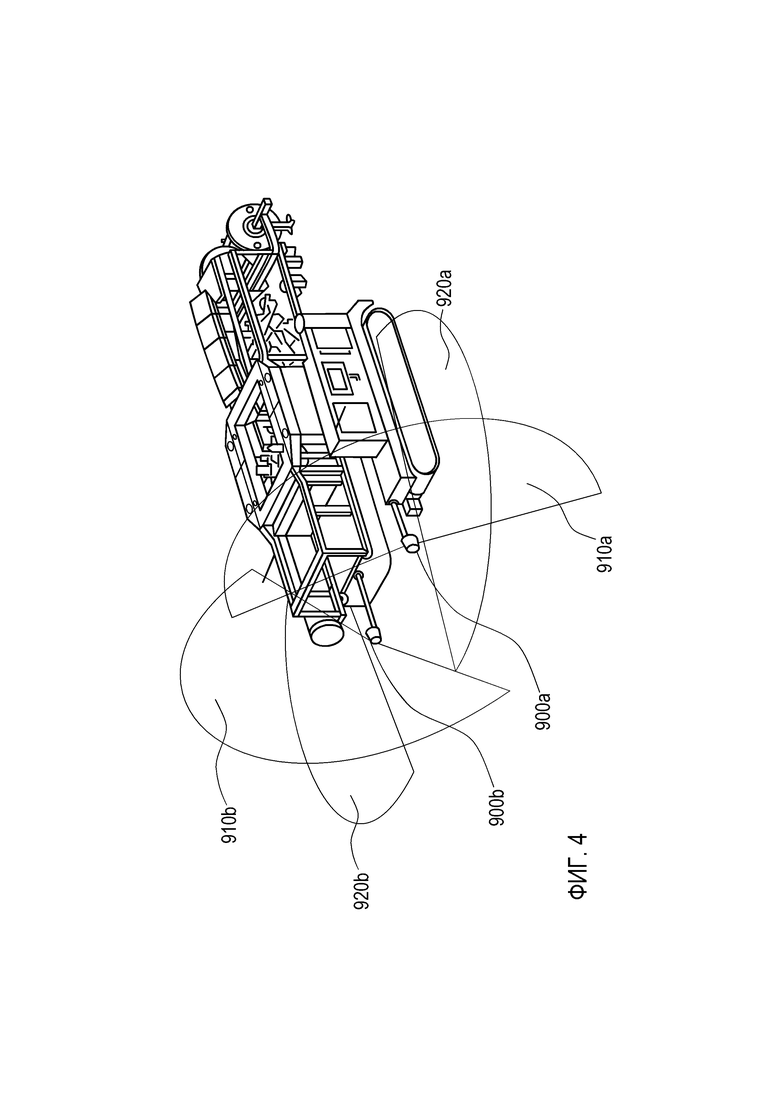
фиг. 4 показывает другой вид в аксонометрии загрузочного узла с углами горизонтального и вертикального сканирования,
фиг. 5 показывает другой вид загрузочного узла с углами горизонтального и вертикального сканирования,
фиг. 6 показывает вид сверху загрузочного узла с углами горизонтального и вертикального сканирования,
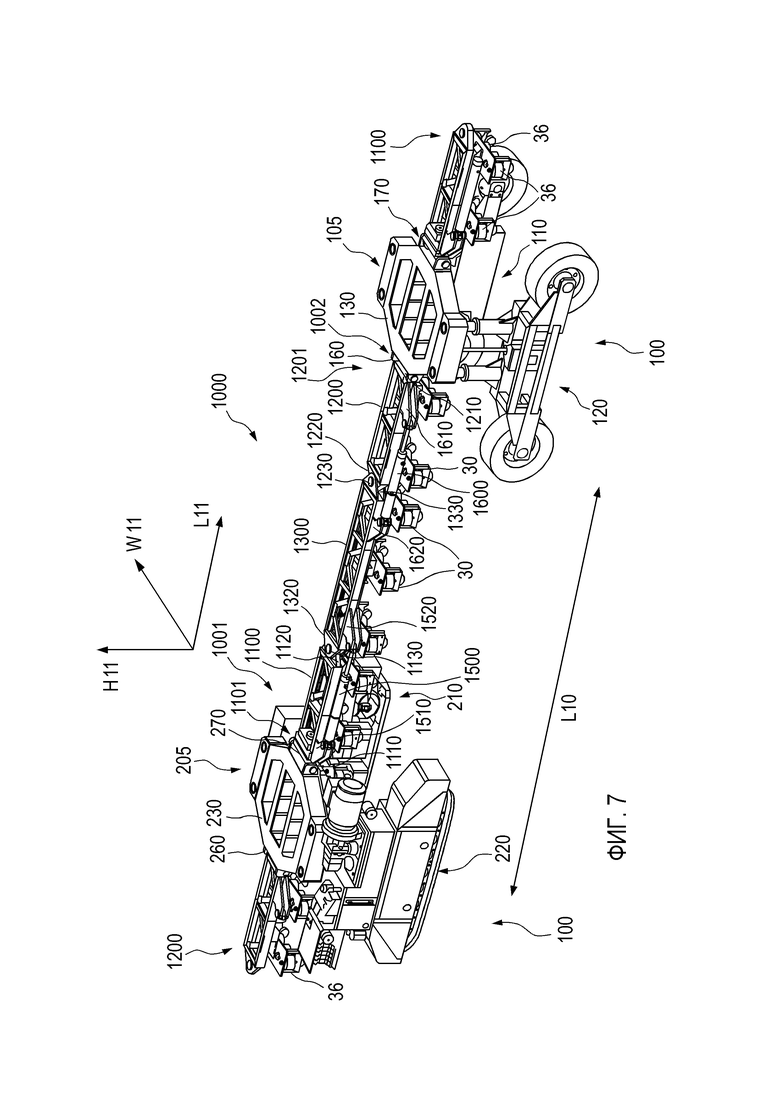
фиг. 7 показывает вид в аксонометрии двух транспортных узлов и установленной между ними опорной конструкции, и
фиг. 8 показывает детальный вид в аксонометрии опорной конструкции, показанной на фиг. 7.
На фиг. 1 и 2 показаны виды в аксонометрии мобильной транспортировочной установки 1. Мобильная транспортировочная установка 1 содержит загрузочный узел 700 в местоположении разработки месторождения рядом с горнодобывающим средством 750, например с врубовой машиной, разгрузочный узел 800 в местоположении разгрузки, и несколько транспортных узлов 100, расположенных между загрузочным узлом 700 и разгрузочным узлом 800. Установка 1 расположена внутри шахты и соединяет местоположение разработки месторождения с местоположением разгрузки вдоль пути, проходящего через шахтные стволы. Транспортные узлы 100 могут быть либо колесными блоками 105, либо гусеничными блоками 205, удерживающими установку 1 в подвижном состоянии внутри шахтных стволов. Как можно видеть на фиг. 1, мобильная транспортировочная установка может изгибаться вокруг углов внутри шахты, следуя по пути через шахтные стволы. Благодаря модульности данной установки возможна различная установка колесных и гусеничных блоков.
На фиг. 2 обозначены углы 910b вертикального сканирования, а также опорные конструкции 1000 между транспортными узлами, а именно между гусеничными блоками 205 и колесными блоками 105. Кроме того, на фиг. 2 показано разгрузочное средство 850 для разгрузки фрагментированного материала из разгрузочного узла 802 другой конвейерной системы или подобной ей. В дополнение к датчикам для вертикального сканирования, как обозначено углами 910b вертикального сканирования, или вместо них, блоки управления могут содержать датчики для вертикального сканирования. В частности, предпочтительно первый и последний транспортные узлы мобильной транспортировочной установки, обычно загрузочный и разгрузочный узлы, содержат датчики как для вертикального, так и для горизонтального сканирования, тогда как передаточные блоки между первым и последним транспортными узлами содержат датчики только для вертикального или только для горизонтального сканирования.
Фиг. 3-6 показывают различные виды загрузочного узла, имеющим блок 950 управления (см. фиг. 6), содержащий датчики 900а, b на противоположных сторонах загрузочного узла 700, с обозначенными углами 910а, b вертикального сканирования и углами 920а, b горизонтального сканирования. В данном случае датчик 900а содержит 2D лазерный сканер, расположенный для сканирования вдоль угла 910а вертикального сканирования, и 2D лазерный сканер, расположенный для сканирования вдоль угла 920а горизонтального сканирования. Датчик 900b содержит 2D лазерный сканер, расположенный для сканирования вдоль угла 910b вертикального сканирования, и 2D лазерный сканер, расположенный для сканирования вдоль угла 920b горизонтального сканирования. Однако возможны варианты. В частности, 2D лазерный сканер, расположенный под углом по существу к горизонтальной плоскости и по существу к вертикальной плоскости, может быть использован для сканирования горизонтального, а также вертикального секторов окружающей среды. Кроме того, может использоваться 3D лазерный сканер.
Фиг. 7 показывает вид в аксонометрии двух транспортных узлов 100, а именно колесный блок 105 и гусеничный блок 205, а также установленной между ними опорной конструкции 1000. Опорная конструкция 1000 проходит между первым концом 1001 и вторым концом 1002 и содержит первый концевой элемент 1100 с основной протяженностью в продольном направлении L11, с протяженностью по ширине в направлении W11 ширины перпендикулярно продольному направлению L11 и с протяженностью по высоте в направлении Н11 высоты перпендикулярно продольному направлению L11 и направлению W11 ширины. Опорная конструкция дополнительно содержит второй концевой элемент 1200 с основной протяженностью в продольном направлении L11, с протяженностью по ширине в направлении W11 ширины перпендикулярно продольному направлению L11 и с протяженностью по высоте в направлении Н11 высоты перпендикулярно продольному направлению L11 и направлению W11 ширины. Опорная конструкция также содержит связующий элемент 1300 с основной протяженностью в продольном направлении L11, с протяженностью по ширине в направлении W11 ширины перпендикулярно продольному направлению L11, и с протяженностью по высоте в направлении Н11 высоты перпендикулярно продольному направлению L11 и направлению W11 ширины.
Первый концевой элемент 1100, второй концевой элемент 1200 и связующий элемент 1300 все имеют каркасную конструкцию, при этом протяженность в продольном направлении и по ширине превышает протяженность по высоте. Опорная конструкция дополнительно содержит множество направляющих средств 30 для вхождения в соединение с противоположными продольными кромками ленты закрытого ленточного конвейера, которые могут быть, например, полностью направляющими средствами 36. В этом варианте выполнения направляющие средства расположены у первого концевого элемента 1100, второго концевого элемента 1200, а также связующего элемента 1300. Первый концевой элемент 1100 и второй концевой элемент 1200 оба имеют, соответственно, наружный конец 1101, 1201. Оба наружных конца 1101, 1201 содержат концевые соединители 1110, 1210, соответственно, первый концевой соединитель 1110 и второй концевой соединитель 1210. Первый и второй концевые соединители 1110, 1210 оба выполнены с возможностью образовывать соединение с транспортным узлом 100, 105, 205.
В показанном варианте выполнения первый концевой соединитель 1110 имеет кольцеобразную форму и входит в соединение с соединителем 270, имеющим форму бруска, гусеничного блока 205. Соответственно, второй концевой соединитель 1210 образует соединение аналогичным образом с соединителем 160 колесного блока 105. На противоположных сторонах гусеничного блока 205 в продольном направлении L11 расположен другой второй концевой элемент 1200, соединенный с соединителем 260 гусеничного блока, тогда как на противоположной стороне колесного блока 105 в продольном направлении L11 расположен другой первый концевой элемент 1100, соединенный с соединителем 170 колесного блока.
Следует понимать, что транспортные узлы могут быть взаимозаменяемыми, благодаря модульной компоновке мобильной транспортировочной установки, для удовлетворения определенных требований. Соединение, образованное между первым концевым соединителем 1110 и соединителем 270 гусеничного блока 205, выполнено с возможностью поворота вокруг оси, параллельной направлению W11 ширины, и вокруг оси, параллельной продольному направлению L11. Соединение, образованное между вторым концевым соединителем 1210 и соединителем 160 колесного блока 105, выполнено с возможностью поворота вокруг оси, параллельной направлению W11 ширины. Первый концевой элемент 1100 и второй концевой элемент 1200 оба имеют, соответственно, внутренний соединитель 1120, 1220, тогда как связующий элемент 1300 на противоположных концах в продольном направлении L11 имеет два внутренних соединителя 1320, 1330.
В этом варианте выполнения внутренний соединитель 1120 первого концевого элемента 1100 образует соединение с одним из концевых соединителей 1320 связующего элемента 1300, тогда как внутренний соединитель 1220 второго концевого элемента 1200 образует соединение с другим противоположным внутренним соединителем 1330 связующего элемента. Оба соединения допускают поворот вокруг оси, параллельной направлению Н11 высоты и поддерживаются посредством соединительного штыря 1130, 1230, соответственно, первого и второго концевых элементов 1100, 1200.
В этом варианте выполнения первый концевой соединитель 1110 закреплен против поворота вокруг оси, параллельной направлению Н11 высоты, второй концевой соединитель 1210 закреплен против поворота вокруг оси, параллельной направлению Н11 высоты и закреплен против поворота вокруг оси, параллельной продольному направлению L11, при этом внутренние соединители 1120, 1220, 1320, 1330 закреплены против поворота, соответственно, вокруг оси, параллельной направлению W11 ширины, и оси, параллельной продольному направлению L11.
Между первым концевым элементом 1100 и связующим элементом 1300, а также между вторым концевым элементом 1200 и связующим элементом расположены, соответственно, первый и второй раздвижные элементы 1500, 1600. Первый раздвижной элемент 1500 установлен на первой стороне первого монтажного элемента 1510, расположенного на первом концевом элементе 1100, и на второй стороне второго монтажного элемента 1520, расположенного на связующем элементе 1300.
Соответственно, второй раздвижной элемент 1600 установлен на первой стороне первого монтажного элемента 1610, расположенного на втором концевом элементе 1200, и на второй стороне второго монтажного элемента 1620, расположенного на связующем элементе 1300.
Каждый из первого и второго раздвижных элементов 1500, 1600 выполнен в виде гидравлического цилиндра, предпочтительно с приводом от узла гидравлических клапанов, расположенного или на одном, или на обоих колесном блоке и/или гусеничном блоке. Первый и второй раздвижные элементы 1500, 1600 дополнительно расположены с возможностью управления поворотным движением вокруг внутренних соединителей 1120, 1220, соответственно, первого и второго концевых элементов 1100, 1200. Кроме того, первый и второй раздвижные элементы 1500, 1600 выполнены с возможностью регистрации расстояния, на которое они втягиваются и/или выдвигаются.
Как можно видеть в этом варианте выполнения, первый раздвижной элемент 1500 перекрывает соединение, образованное между двумя внутренними соединителями 1120, 1320 первого концевого элемента 1100 и связующим элементом 1300, а второй раздвижной элемент 1600 перекрывает соединение, образованное между двумя внутренними соединителями 1220, 1330 второго концевого элемента 1100 и связующим элементом 1300. Общая длина опорного блока L10 составляет приблизительно 6 м.
Фиг. 8 показывает детальный вид в аксонометрии опорной конструкции 1000, показанной на фиг. 7. В данном случае можно видеть, что направляющие средства 30 выполнены в виде полных направляющих средств 36, содержащих два противоположных боковых ролика 31, верхний направляющий ролик 33 и нижний направляющий ролик 32 для взаимодействия с лентой закрытого ленточного конвейера.
Перечень ссылочных позиций
1 мобильная транспортировочная установка
4 фрагментированный материал
30 направляющее средство
31 боковой направляющий ролик
33 верхний направляющий ролик
35 сдвоенное направляющее средство
36 полное направляющее средство
100 транспортный узел
105 колесный блок
110, 120 наземная транспортная конструкция колесного блока
130 опорная рама колесного блока
160, 170 соединитель колесного блока
205 гусеничный блок
210, 220 наземная транспортная конструкция гусеничного блока
230 опорная рама гусеничного блока
260, 270 соединитель
700 загрузочный узел
750 врубовая машина
800 разгрузочный узел
850 разгрузочное средство
900а, b сканирующие датчики
910а, b углы вертикального сканирования
920а, b углы горизонтального сканирования
950 блок управления
1000 опорная конструкция
1001 первый конец опорной конструкции
1002 второй конец опорной конструкции
1100 первый концевой элемент
1101 наружный конец первого концевого элемента
1110 первый концевой соединитель
1120 внутренний соединитель первого концевого элемента
1130 соединительный штырь первого концевого элемента
1200 второй концевой элемент
1201 наружный конец второго концевого элемента
1210 второй концевой соединитель
1220 внутренний соединитель второго концевого элемента
1230 соединительный штырь второго концевого элемента
1300 связующий элемент
1320, 1330 внутренний соединитель связующего элемента
1500 первый раздвижной элемент
1510 первый монтажный элемент для раздвижного элемента
1520 второй монтажный элемент для раздвижного элемента
1550 блок управления раздвижного элемента
1600 второй раздвижной элемент
1610 первый монтажный элемент для раздвижного элемента
1620 второй монтажный элемент для раздвижного элемента
H11 направление по высоте
L10 длина опорной конструкции
L11 продольное направление
W11 направление по ширине.





Изобретение относится к устройству управления и способу управления мобильной транспортировочной установкой для непрерывной транспортировки фрагментированного материала в направлении транспортировки. Техническим результатом является повышение надежности и эффективности определения направления движения и/или перемещения мобильной транспортировочной установки, в частности, в стволах шахт подземной разработки месторождения. Устройство управления содержит первый и второй блоки управления, расположенные, соответственно, в первом и втором транспортных узлах и выполненные с возможностью обмена, хранения и обработки данных и с возможностью генерации сигнала управления движением для управления движением, соответственно, первого или второго транспортного узла. Первый и второй блоки управления содержат первый и второй датчики для сканирования по меньшей мере сектора окружающей среды. Устройство управления выполнено с возможностью сравнения вторых результатов сканирования, полученных от второго датчика, с первыми результатами сканирования, полученными от первого датчика, причем вторые результаты сканирования получены в таком положении хода второго транспортного узла, которое соответствует положению хода первого транспортного узла, в котором были получены первые результаты сканирования. 3 н. и 12 з.п. ф-лы, 8 ил.
1. Устройство управления, предназначенное для управления мобильной транспортировочной установкой для непрерывной транспортировки фрагментированного материала в направлении транспортировки, содержащее
первый блок управления, расположенный в первом транспортном узле мобильной транспортировочной установки и выполненный с возможностью обмена, хранения и обработки данных и с возможностью генерации сигнала управления движением для управления движением первого транспортного узла,
второй блок управления, расположенный во втором транспортном узле мобильной транспортировочной установки и выполненный с возможностью обмена, хранения и обработки данных и с возможностью генерации сигнала управления движением для управления движением второго транспортного узла,
причем первый блок управления дополнительно содержит по меньшей мере один первый датчик, расположенный и выполненный с возможностью сканирования по меньшей мере сектора окружающей среды в двух измерениях по существу параллельно направлению транспортировки, в частности сектора с углом более 90°, предпочтительно сектора 180°, или в трех измерениях,
второй блок управления дополнительно содержит по меньшей мере один второй датчик, расположенный и выполненный с возможностью сканирования по меньшей мере сектора окружающей среды в двух измерениях по существу параллельно направлению транспортировки, в частности сектора с углом более 90°, предпочтительно сектора 180°, или в трех измерениях,
причем устройство управления выполнено с возможностью сравнения вторых результатов сканирования, полученных от второго датчика второго блока управления, с первыми результатами сканирования, полученными от первого датчика первого блока управления, причем вторые результаты сканирования получены в таком положении хода второго транспортного узла, которое соответствует положению хода первого транспортного узла, в котором были получены первые результаты сканирования.
2. Устройство по п. 1, в котором по меньшей мере один дополнительный блок управления расположен в дополнительном транспортном узле мобильной транспортировочной установки и выполнен с возможностью обмена, хранения и обработки данных и с возможностью генерации сигнала управления движением для управления движением указанного дополнительного транспортного узла.
3. Устройство по меньшей мере по одному из предыдущих пунктов, в котором первый блок управления, и/или второй блок управления, и/или указанный дополнительный блок управления содержит по меньшей мере один первый, и/или второй, и/или дополнительный датчик, расположенный и выполненный с возможностью сканирования по меньшей мере сектора окружающей среды по существу перпендикулярно направлению транспортировки, предпочтительно по меньшей мере сектора выше горизонтальной плоскости, в частности сектора с углом более 90° или более 180°, в двух измерениях или в трех измерениях.
4. Устройство по меньшей мере по одному из предыдущих пунктов, в котором первый датчик, и/или второй датчик, и/или дополнительный датчик расположен под углом к по существу горизонтальной плоскости и/или к по существу вертикальной плоскости.
5. Устройство по меньшей мере по одному из предыдущих пунктов, в котором первый блок управления выполнен с возможностью приема данных от пользовательского интерфейса и/или от предшествующего устройства, в частности от врубовой машины, в частности данных об управлении движением для направления вдоль траектории движения.
6. Устройство по меньшей мере по одному из предыдущих пунктов, в котором
второй блок управления и/или дополнительный блок управления выполнены с возможностью обмена данными с первым блоком управления,
второй блок управления и/или дополнительный блок управления выполнены с возможностью оценки, и/или определения, и/или получения команды сканирования, содержащей, в частности, следующий момент времени (дельта Т) и/или следующий шаг расстояния, для выполнения сканирования окружающей среды,
второй блок управления и/или дополнительный блок управления выполнены с возможностью сканирования окружающей среды в соответствии с командой сканирования,
второй блок управления и/или дополнительный блок управления выполнены с возможностью обработки результатов сканирования.
7. Устройство по меньшей мере по одному из предыдущих пунктов, содержащее базовую станцию, расположенную и выполненную с возможностью передачи сигнала позиционирования в первый блок управления, и/или во второй блок управления, и/или в дополнительный блок управления и/или с возможностью приема сигнала позиционирования из первого блока управления, и/или из второго блока управления, и/или из дополнительного блока управления, для определения местоположения первого блока управления, и/или второго блока управления, и/или дополнительного блока управления.
8. Устройство по меньшей мере по одному из предыдущих пунктов, причем устройство управления, в частности первый блок управления, и/или второй блок управления, и/или дополнительный блок управления,
выполнено с возможностью определения и предпочтительно хранения и/или обработки данных относительно местоположения, и/или скорости, и/или ускорения, и/или торможения, и/или изменения направления, и/или выдвижения или втягивания рулевого цилиндра транспортного узла и/или гидравлического цилиндра опорной конструкции конвейера, и/или
выполнено с возможностью определения и предпочтительно хранения, и/или обработки, и/или выдачи соответствующего текущего местоположения первого блока управления, и/или второго блока управления, и/или дополнительного блока управления на основании определенного местоположения и данных.
9. Мобильная транспортировочная установка для непрерывной транспортировки фрагментированного материала в направлении транспортировки, содержащая
загрузочный узел, содержащий узел для переноса материала, предназначенный для приема фрагментированного материала и содержащий конструкцию для переноса материала, расположенную в транспортном узле,
разгрузочный узел, содержащий узел для переноса материала, предназначенный для разгрузки фрагментированного материала и содержащий конструкцию для переноса материала, расположенную в транспортном узле,
по меньшей мере один дополнительный транспортный узел,
расположенный между загрузочным узлом и разгрузочным узлом,
конвейерный элемент для транспортировки фрагментированного материала, в частности лента закрытого ленточного или бункерного конвейера,
устройство управления по одному из пп. 1-8, причем первый блок управления расположен в загрузочном узле, второй блок управления расположен в разгрузочном узле и по меньшей мере один дополнительный блок управления расположен в указанном по меньшей мере одном дополнительном транспортном узле.
10. Способ управления мобильной транспортировочной установкой для непрерывной транспортировки фрагментированного материала в направлении транспортировки по п. 9, включающий
обеспечение наличия мобильной транспортировочной установки по п. 9,
сканирование по меньшей мере сектора окружающей среды в двух измерениях по существу параллельно направлению транспортировки, в частности сектора с углом более 90°, предпочтительно сектора 180°, или в трех измерениях с использованием первого датчика, расположенного в первом транспортном узле,
сканирование по меньшей мере сектора окружающей среды в двух измерениях по существу параллельно направлению транспортировки, в частности сектора с углом более 90°, предпочтительно сектора 180°, или в трех измерениях с использованием второго датчика, расположенного во втором транспортном узле,
сравнение вторых результатов сканирования, полученных от второго датчика второго блока управления, с первыми результатами сканирования, полученными от первого датчика первого блока управления, причем вторые результаты сканирования получают в таком положении хода второго транспортного узла, которое соответствует положению хода первого транспортного узла, в котором были получены первые результаты сканирования.
11. Способ по п. 10, в котором сканируют по меньшей мере сектор окружающей среды перпендикулярно направлению транспортировки, предпочтительно по меньшей мере сектор выше горизонтальной плоскости, в частности сектор с углом более 90° или более 180°, при этом по меньшей мере один датчик расположен в первом блоке управления, и/или втором блоке управления, и/или в дополнительном блоке управления.
12. Способ по меньшей мере по одному из пп. 9-11, в котором принимают данные от пользовательского интерфейса и/или от
предшествующего устройства, в частности от врубовой машины, в частности данные об управлении движением для направления вдоль траектории движения.
13. Способ по меньшей мере по одному из пп. 9-12, в котором второй блок управления и/или дополнительный блок управления
обмениваются данными с первым блоком управления,
второй блок управления и/или дополнительный блок управления оценивают, и/или определяют, и/или принимают команду сканирования, содержащую, в частности, следующий момент времени (дельта Т) и/или следующий шаг расстояния, для выполнения сканирования окружающей среды,
второй блок управления и/или дополнительный блок управления сканируют окружающую среду в соответствии с командой сканирования,
второй блок управления и/или дополнительный блок управления обрабатывают результаты сканирования.
14. Способ по меньшей мере по одному из пп. 9-13, в котором определяют местоположение первого блока управления, и/или второго блока управления, и/или указанного по меньшей мере одного дополнительного блока управления в базовой станции.
15. Способ по меньшей мере по одному из пп. 9-11, в котором определяют и предпочтительно сохраняют и/или обрабатывают данные
относительно местоположения, и/или скорости, и/или ускорения, и/или торможения, и/или изменения направления, и/или выдвижения или втягивания рулевого цилиндра транспортного узла и/или гидравлического цилиндра опорной конструкции конвейера, и/или
определяют и предпочтительно сохраняют и/или обрабатывают, и/или выдают соответствующее текущее местоположение первого блока управления, и/или второго блока управления, и/или указанного по меньшей мере одного дополнительного блока управления на основании определенного местоположения и данных.
| WO 2002030792 A2, 18.04.2002 | |||
| ВЫЕМОЧНАЯ МАШИНА ДЛЯ ОДНОВРЕМЕННОЙ ОТБОЙКИ И ПОГРУЗКИ УГЛЯ | 1997 |
|
RU2127808C1 |
| DE 102009051450 A1, 19.05.2011 | |||
| WO 2013165303 A1, 07.11.2013 | |||
| US 20140324267 A1, 30.10.2014. | |||

