Область техники
Изобретение относится к транспортным устройствам для перевозки и механизированной погрузки и разгрузки артиллерийского вооружения, преимущественно тяжелых минометов. Изобретение относится к области военной техники и может быть использовано при разработке или модернизации минометных комплексов для обеспечения возможности манёвра, сокращения времени подготовки миномета к транспортировке на платформе и к открытию огня после остановки.
Уровень техники
Для повышения мобильности минометного вооружения разработаны возимые тяжелые минометы для буксировки или установленные на гусеничные или колесные шасси. Они легче и мобильнее по сравнению с крупнокалиберной артиллерией.
В 1979 году конструкторами ЦНИИ «Буревестник» разработан буксируемый миномётный комплекс калибра 120 мм, обеспечивающий транспортировку миномёта как возимым, так и буксируемым способами, который выбран в качестве прототипа.
Комплекс «Сани» включает в себя 120-мм миномет с индексом 2Б11, колесный ход 2Л81 и транспортную машину, в роли которой выступает мощный грузовой «Урал», способный передвигаться без дозаправки на расстояние до 1000 км, хотя орудие может перевозиться и многоцелевым транспортером-тягачом. Минометный расчет 5 человек и водитель транспортной машины. Перевозка миномёта с колёсным ходом может осуществляться как простой буксировкой, так и в кузове.
Техническая проблема заключается в необходимости иметь большой по численности минометный расчет для выполнения задания занятия огневой позиции и в длительной по времени подготовке миномета в процессе занятия огневой позиции для выполнения огневой задачи.
В разобранном виде миномет может перевозиться различным транспортом. Также имеется колесный ход для буксировки без разборки. В состав комплекса также входит транспортная грузовая машина. Колесный миномет и боекомплект перевозятся в бортовой части машины и опускаются/поднимаются с помощью лебедки по устанавливаемым сланям пандуса. Данная конструкция выбрана в качестве прототипа. Приведение в боевое положение буксируемого или обычного миномета требует, по меньшей мере, 10-15 минут и от четырех до шести человек.
Также грузовик может буксировать миномет с определенными ограничениями скорости.
За счет установки минометов 2Б11 на современные колесные шасси (Урал-43206) и бронированные гусеницы («Дилемма-2С12» - самоходный вариант на базе бронетранспортёра МТ-ЛБ) высокой проходимости повысилась мобильность и защищенность расчета и боекомплекта. Процессы погрузки и разгрузки миномета механизированы за счет оснащения комплекса электролебедкой. Это позволило снизить интенсивность работ, время, необходимое для развертывания минометов на огневой позиции, в том числе сократить время на смену позиций.
В конце 1970 в ЦНИИ «Буревестник» в рамках усиления огневой мощи мотострелков создан возимый 120-мм миномет «Бант», который подтягивался ручной лебедкой и крепился на специальном захватном устройстве в корме БТР-70. Там же могли крепиться ящики для перевозки минометных боеприпасов (https://topwar.ru/210946-kriticheskaja-ujazvimost-samohodnye-minomety-na-specoperacii.html).
Преимущество буксируемых систем заключается в том, что они могут быть «легко развернуты легкими машинами и/или вертолетом.
Недостатком является длительность процесса выгрузки миномета из кузова транспортного средства, необходимость затрачивать время на доставку и развертывание боевой позиции, демонтажа миномета с колесного шасси, установки опорной плиты и двуноги. Для погрузки и транспортировки все операции необходимо выполнить в обратной последовательности.
В секторе более тяжелых минометов существует тенденция перехода от буксируемых систем к более мобильным самоходным минометам. Для сокращения времени развертывания минометного вооружения минометы установили на транспортное средство с колесным или гусеничным шасси.
Если миномет самоходный, это означает, что он установлен на большое гусеничное или колесное транспортное средство и стреляет с этой же платформы, тогда как буксируемый миномет подразумевает установку вооружения на прицеп и стрельбу с прицепа после занятия огневой позиции.
При установке минометов на транспортные средства минометное вооружение использовалось с транспортного средства, что позволяло сократить время на развертывание миномета в боевое положение опрокидыванием миномета с установкой на опорную плиту, жестко связанную с транспортным средством. Такую конструкцию имеет миномет 2С4 «Тюльпан».
Известен проект 120 мм самоходного миномета «Тунджа-Сани» который был создан на базе шасси бронированного артиллерийского тягача МТ-ЛБ (объект 6). В первом варианте проекта миномет размещается в корпусе машины в походном положении, а в боевом - он разворачивается таким образом, что опорная плита опирается о грунт, ствол при этом выходит за габариты машины
(http://www.libma.ru/transport_i_aviacija/otechestvennye _samohodnye_artilleriiskie_i_zenitnye_ustanovki_chast_1/p82.php).
Аналогичные конструкции разрабатываются и в странах НАТО. Испанская компания NTGS (New Technologies Global Systems) разработала минометный комплекс Alakran. Большая опорная плита 120-мм миномета, устанавливаемого на задней платформе машины, передает силы отката на грунт. Углы горизонтального наведения составляют ± 60°, вертикального наведения от 45° до 90°, наведение миномета осуществляется при помощи электромеханических приводов. Ограниченная масса системы позволяет устанавливать его на пикап грузоподъемностью 1,5 тонны, во время движения ствол миномета размещается горизонтально на грузовой платформе легкового пикапа Toyota Land Cruiser 4x4 («Минометные комплексы: мобильность прежде всего» 2 мая 2017. Военное обозрение).
Недостатком данной конструкции является жесткая сцепка минометного вооружения и транспортного средства. При использовании опорной плиты миномета с опорой на грунт, угол горизонтального наведения определяется положением самого транспортного средства. Сектор обстрела сужается и для оперативного изменения угла горизонтального наведения необходимо изменить положение транспортного средства.
Недостатком так же является сложность использования миномета отдельно от шасси, которое нерационально используется.
Раскрытие сущности изобретения
Наиболее важной задачей изобретения является повышение мобильности миномета и повышение эффективности боевого применения тяжелого миномета.
Техническим результатом является обеспечение минимальных затрат времени для развертывания тяжелого миномета на огневой позиции для выполнения огневой задачи и сокращение количества задействованных бойцов минометного расчета для занятия огневой позиции, сокращение времени погрузки-выгрузки миномета на огневой позиции с платформы для перевозки миномета с механизмом погрузки-выгрузки.
Техническим результатом так же является возможность переоборудования грузового транспортного средства и его боевого использования путем размещения платформы для перевозки миномета в кузове транспортного средства, с возможностью взять на борт транспортного средства дополнительные выстрелы для повышения огневого могущества миномета.
Технический результат достигается тем, что платформа выполнена в виде прямоугольной опорной рамы с пространственным каркасом из металлопрофиля с узлами погрузки и крепления в кузове транспортного средства с возможностью монтажа и демонтажа, с механизмом для выполнения погрузки и выгрузки собранного и оснащенного для стрельбы миномета.
В передней части посередине, приварен опорный кронштейн для закрепления, например, болтовым соединением, лебедки механизма погрузки, которая может быть выполнена с ручным или электроприводом.
В передней верхней части пространственного каркаса опорной платформы приварен элемент крепления ствола миномета в собранном виде: с двуногой лафетом и опорной плитой, прицельным приспособлением, предохранителем от двойного заряжания, с закрепленным на стволе узлом грузодержателя в виде рамы несъемной наделки или элементом для крепления грузозахватного устройства, например, в виде замкнутой петли из троса, с хомутом для фиксации ствола.
Элемент крепления ствола миномета выполнен с замком быстроразъемного соединения для открытия и закрытия которого используется тросовый привод дистанционного управления.
Механизм погрузки миномета имеет прямоугольную поворотную раму из металлопрофиля, качающуюся в средней части опорной рамы платформы с пружиной между поворотной рамой и опорной рамой платформы, пространственную подвижную раму из металлопрофиля на которую опирается миномет при погрузке и транспортировке с двумя направляющими, верхние концы которых подвижно закреплены на торцах поворотной рамы, а на нижних концах закреплены опорные башмаки на сферических опорах.
Трос лебедки механизма погрузки перекинут через ролик, на верхней поперечине поворотной рамы. На конце троса лебедки механизма погрузки имеется крюк для захвата петли наделки грузодержателя миномета, подтягивания, опрокидывания и погрузки миномета на направляющие пространственной подвижной рамы.
Для погрузки и выгрузки миномета достаточно двух бойцов минометного расчета при этом один контролирует процесс погрузки миномета, а другой управляет электроприводом лебедки и открывает дистанционно-управляемое быстроразъемное крепление ствола миномета на платформе.
Для погрузки миномета транспортное средство подъезжает к позиции миномета, боец минометного расчета включает лебедку для выпуска троса.
Под действием пружины поворотная рама поворачивается, направляющие пространственной подвижной рамы скользят по роликам на торце опорной рамы и опускаются на грунт с опорой на башмаки.
Бойцы минометного расчета поднимают ствол миномета в вертикальное положение, опорная плита и ноги двуноги-лафета закрепляются в раме наделки грузодержателя, крюк троса лебедки механизма погрузки закрепляется на петле наделки или элемента грузодержателя миномета и при работе лебедки с натяжением троса происходит опрокидывание миномета на направляющие пространственной подвижной рамы, с фиксацией кронштейнов наделки в пазах пространственной подвижной рамы.
Дальнейшее натяжение троса приводит к подъему направляющих с минометом, при этом направляющие опираются на свободно вращающиеся ролики, смонтированные на заднем крае поперечины прямоугольной опорной рамы.
При подъеме сжимается пружина между опорной рамой и поворотной рамой, до момента укладки ствола миномета в ложемент и упора поворотной рамы в упоры на пространственном каркасе опорной рамы, вследствие чего лебедка останавливается, а ствол миномета фиксируется хомутом с замком быстроразъемного соединения.
Расположение опорной плиты миномета между направляющих пространственной подвижной рамы предотвращает перемещения опорной плиты при дальнейшей транспортировке, обеспечивается размещения миномета в габаритах прямоугольной опорной рамы.
Для разгрузки миномета на позиции, боец минометного расчета освобождает замок быстроразъемного соединения хомута ложемента ствола, включает привод лебедки на выпуск троса и с барабана лебедки разматывается трос.
Под действием пружины поворотная рама поворачивается, направляющие пространственной подвижной рамы скатываются по роликам на задней поперечине опорной рамы и опускаются на грунт с упором на башмаки, миномет опорной плитой скользит по направляющим и опускается на грунт до соприкосновения.
После установки минометной плиты на грунт, боец минометного расчета освобождает от крюка троса лебедки наделку или петлю грузодержателя миномета, а миномет разворачивается для боевого применения на огневой позиции. Боец минометного расчета или водитель транспортного средства включают лебедку на сматывание троса, чтобы приподнять направляющие и отъехать с боевой позиции.
Для управления электроприводом лебедки в задней части опорной раме платформы закреплен, например, болтовым соединением блок управления электроприводом лебедки, который соединяется электрическими проводами, с контактным датчиком упора на пространственном каркасе, с возможностью соединения с системой электроснабжения транспортного средства или с внешним источником электропитания.
Для автономной работы на конструктивных элементах в передней части опорной рамы платформы закреплен, например, болтовым соединением, блок питания с аккумуляторными батареями, соединенный электрическим кабелем с блоком управления и электроприводом лебедки.
Корневой участок троса на барабане лебедки, длиной не менее десяти диаметров барабана, окрашен в красный цвет, для индикации бойцам минометного расчета о длине выпущенного троса и о необходимости отключения лебедки.
Блок управления лебедкой позволяет управлять направлением и скоростью вращения электропривода лебедки для намотки или выпуска троса.
Электродвигатель привода лебедки оснащен ограничителем по току потребления, что предотвращает повреждение обмоток электродвигателя и позволяет останавливать электродвигатель в автоматическом режиме.
При необходимости блок управления лебедкой может быть установлен в любом удобном месте в кузове транспортного средства или в кабине для дистанционного управления погрузкой и выгрузкой миномета.
Дополнительно для остановки лебедки при погрузке тяжелого миномета на упоре для поворотной рамы установлен контактный датчик, который срабатывает при соприкосновении с поворотной рамой.
Электропривод лебедки механизма погрузки может быть выполнен на основе электродвигателя с вентильным управлением с защитой электродвигателя лебедки по току.
На передней поперечине прямоугольной опорной рамы, в средней части, приварен опорный кронштейн для закрепления, например, болтовым соединением, отдельной лебедки механизма погрузки с ручным приводом и с тросом, которая устанавливается в случае полного отсутствия электропитания, что позволяет осуществить погрузку миномета силами бойцов минометного расчета.
При полном отсутствии электропитания, поломки лебедки с электроприводом, отсутствии лебедки с ручным приводом имеется возможность погрузки миномета силами бойцов минометного расчета, для чего извлекается ось крепления верхней чашки пружины к подъемному рычагу поворотной рамы, пружина освобождается и не препятствует складыванию поворотной рамы, что позволяет минометному расчету опрокинуть миномет на направляющие пространственной подвижной рамы, и поднять вручную или с помощью лебедки с ручным приводом, миномет до момента фиксации ствола миномета хомутом на ложементе.
В пружине, поднимающей поворотную раму, для центрирования чашек пружины, на нижней закреплена трубка внутри которой скользит стержень, закрепленный на верхней чашке, закрепленной на рычаге, при этом стержень свободно движется в трубке на нижней чашке пружины.
Хомут для крепления ствола миномета на ложементе выполнен в виде фигурного сектора с двумя плечами, на одном из которых приварен хомут крепления ствола миномета, а другой выполнен в виде плоского рычага концевой сектор которого упирается в ствол миномета при погрузке, сектор свободно качается на оси параллельной оси ствола миномета уложенного на ложемент, имеющего в средней части отверстие для пружины, конец которой с натягом крепится на кронштейне для ложемента, вследствие чего хомут откидывается и позволяет уложить ствол миномета на ложемент, при этом ствол миномета нажимает на концевой сектор плоского рыча и хомут охватывает ствол миномета полностью в момент соприкосновения ствола с ложементом, после чего замок быстроразъемного соединения закрывается и прижимает хомут для фиксации ствола миномета.
Для раскрытия и закрытия замка быстроразъемного соединения используется тросовый привод, установленный рядом с блоком управления лебедкой механизма погрузки или в торце задней части прямоугольной опорной рамы, шток быстроразъемного соединения оснащен пружиной обеспечивающей открытие замка быстроразъемного соединения и освобождение хомута.
Продольные направляющие пространственной подвижной рамы имеют телескопическую конструкцию в виде отрезков профиля, вставленных в направляющие, выдвижение которых ограничивается подпружиненными штифтами, переставляемых по отверстиям в направляющих, что позволяет устанавливать платформу на транспортное средство с увеличенной погрузочной высотой и обеспечить погрузку миномета, при этом концы телескопических направляющих могут опускаться до упора в грунт башмаками на конце направляющих или в дополнительные опорные башмаки увеличенной площади, при выполнении погрузочно-разгрузочных операций.
Выполнение платформы для перевозки миномета в виде опорной рамы на которой смонтированы элементы пространственного каркаса с элементами закрепления миномета и механизмами погрузки и выгрузки позволяет обеспечить преимущество в боевой обстановке, за счет реализации возможности боевого использования грузового транспортного средства для боевого применения без переделок и изменения конструкции.
Возможность установки платформы для перевозки миномета в кузове грузового автомобиля повышает мобильность миномета, позволяет одновременно выполнять транспортировку личного состава боевого расчета, обеспечить миномет боезапасом.
Подвижность обеспечивает преимущество в боевой обстановке, поскольку грузовые машины повышенной проходимости могут выдвинуться непосредственно к боевой позиции, то это делает минометы более эффективными.
Для выгрузки миномета достаточно раскрыть замок быстроразъемного соединения хомута крепления ствола в ложементе, приведя лебедку в действие опустить миномет на направляющих на грунт и отсоединив крюк троса лебедки, привести миномет в боевое положение на позиции расставив ноги двуноги лафета и опорную плиту.
Оснащение миномета прицельным приспособлением и предохранителем от двойного заряжания значительно сокращает время для приведения минометного комплекса в боевое положение с возможностью начала боевого применения и выполнения первого выстрела.
Современные технологии позволяют противнику легко определить вашу позицию, как только был сделан первый выстрел, поэтому мобильность боевого расчета миномета дает возможность уехать с позиции незамедлительно.
Прежде чем противник сможет определить Ваше местоположение необходимо выполнить несколько выстрелов, загрузить миномет и покинуть боевую позицию.
Транспортное средство повышенной проходимости может подъехать непосредственно к боевой позиции, расчет быстро складывает и закрепляет ноги лафета, крепит опорную плиту, закрепляет крюк троса лебедки и приведя лебедку в действие загружает миномет на платформу.
При оснащении миномета иными элементами для крепления грузозахвата лебедки, например, в виде петли из металлического троса или веревки, охватывающей ствол миномета ниже фланца крепления двуноги-лафета, предложенная платформа с направляющими, позволяет осуществить погрузку миномета для перевозки без демонтажа опорной плиты. При необходимости трос лебедки охватывает ствол миномета ниже фланца крепления двуноги-лафета и по направляющим платформы осуществляется погрузка миномета на транспортное средство.
Наличие блока питания с аккумуляторными батареями для электропитания электропривода лебедки делает платформу для перевозки миномета автономной и незаметной. Наличие кронштейна для крепления лебедки с ручным приводом позволяет произвести выгрузку и погрузки миномета при полном отсутствии электропитания, а при отсутствии лебедки с ручным приводом есть возможность освободив подъемную пружину загрузить миномет силами минометного расчета.
Это сокращает время погрузки и повышает живучесть миномета.
Сокращение времени выдвижения на боевую позицию, выгрузки и погрузки миномета, наличие боезапаса приводит к повышению эффективности боевого применения и мобильности возимого 120 мм миномета.
Краткое описание чертежей
Заявляемая платформа для перевозки миномета с механизмом погрузки иллюстрируется чертежами, представленными на фиг. 1-4.
Краткое описание чертежей.
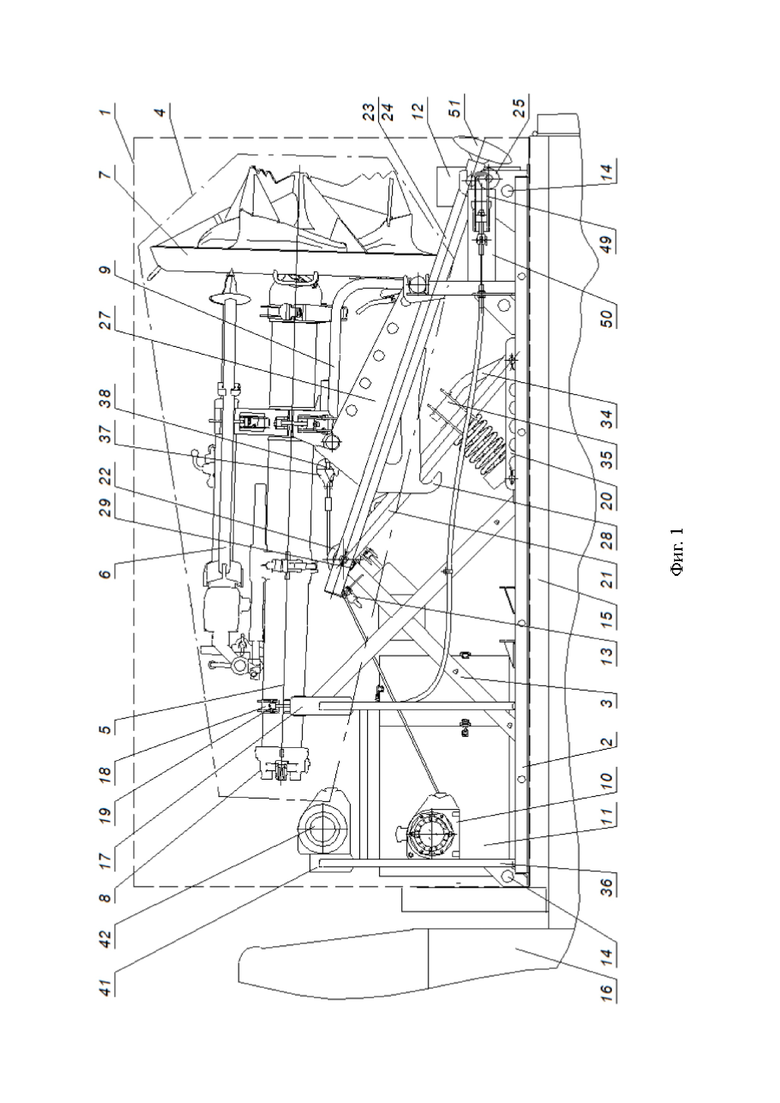
На фиг. 1 представлен вид платформы с загруженным минометом на транспортном средстве;
На фиг. 2 представлен общий вид платформы для перевозки миномета с механизмом погрузки;
На фиг. 3 представлен процесс погрузки миномета на платформу;
На фиг. 4 представлена подъемная пружина с подъемным рычагом;
На фиг. 5 представлен ложемент с открытым хомутом;
На фиг. 6 представлен ствол миномета в ложементе.
На чертежах приняты следующие обозначения:
1 - платформа;
2 - опорная рама;
3 - пространственный каркас;
4 - миномет;
5 - ствол миномета;
6 - двунога-лафет;
7 - опорная плита;
8 - предохранитель от двойного заряжания;
9 - наделка;
10 - лебедка;
11 - блок питания;
12 - блок управления;
13 - контактный датчик;
14 - отверстия для грузозахватов;
15 - грузовая платформа;
16 - транспортное средство;
17 - ложемент;
18 - хомут;
19 - замок;
20 - кронштейн;
21 - поворотная рама;
22 - тросовый ролик;
23 - портал;
24 - продольные направляющие;
25 - ролик опорный;
26 - перемычка;
27 - верхнее ребро с пазами;
28 - нижнее ребро с пазом;
29 - упор;
30 - серьга;
31 - пружина;
32 - нижняя чашка;
33 - верхняя чашка;
34 - подъемный рычаг;
35 - поперечина;
36 - ролик;
37 - крюк;
38 - петля;
39 - трубка;
40 - стержень;
41 - кронштейн;
42 - лебедка с ручным приводом;
43 - фигурный сектор;
44 - плоский рычаг;
45 - пружина;
46 - тросовый привод;
47 - шток;
48 - пружина;
49 - рукоятка;
50 - опорная площадка;
51 - башмак.
Осуществление изобретения
Устройство платформы 1 для перевозки миномета с механизмом погрузки, приведенного на чертеже фиг. 1, 2 и характеризуется тем, что платформа 1 выполнена сваркой из металлопрофиля в виде прямоугольной опорной рамы 2 с пространственным каркасом 3 из металлопрофиля.
Платформа 1 предназначена для погрузки и перевозки миномета 4 в составе: дульнозарядного миномета со стволом миномета 5, оснащенного двуногой лафетом 6, опорной плитой 7, предохранителем от двойного заряжания 8, и с закрепленным узлом грузодержателя в виде трубчатой рамы наделки 9. Элементы трубчатой рамы наделки 9 позволяют заневолить ноги двуноги лафета 6 и закрепить опорную плиту 7 обеспечив ее фиксацию перпендикулярно оси ствола миномета 4.
Для выполнения операций погрузки и выгрузки миномета 4 на опорной раме 2 платформы 1 смонтирован на болтах механизм погрузки с лебедкой 10. Для автономной работы электропривода лебедки 10 на опорной раме 2 болтами и хомутами закрепляется, размещается блок питания 11 с аккумуляторными батареями. Блок управления 12 электропривода лебедки 10 размещается в задней части рамы 2 и закреплен болтовым соединением с возможностью монтажа в другой части рамы 2. Для формирования сигнала о погрузке миномета на пространственном каркасе 3 приварена полка для установки контактного датчик 13 с возможностью регулировки положения штока контактного датчика 13. Электропривод лебедки 10, блок питания 11, блок управления и контактный датчик 13, соединяются между собой электрическими проводами, с возможностью подсоединения к системе электроснабжения транспортного средства 16 или соединения с внешним источником электропитания.
Опорную раму 2 платформы 1 можно грузить и устанавливать на грузовую платформу 15 транспортного средства 16. Для погрузки платформы 1 на опорной раме 2 выполнены отверстия 14 для крепления грузозахватов. Для жесткого закрепления опорной рамы 2 у края грузовой платформы 15 транспортного средства 16 в ней выполнены отверстия через которые она закрепляется болтовыми соединениями.
В передней верхней части пространственного каркаса 3 приварен ложемент 17 для опоры ствола 5, с хомутом 18 для фиксации ствола и с замком 19 быстроразъемного соединения.
В середине прямоугольной опорной рамы 2 по торцам поперечины приварены п-образные кронштейны 20 для осей пространственной поворотной рамы 21 из металлопрофиля, которая на противоположной стороне имеет приваренные по торцам рамы кронштейны для осей тросового ролика 22 и портала 23 с параллельными продольными направляющими 24 соединенные перемычками 26.
Для опоры на грунт свободные концы направляющих 24 оканчиваются башмаками 51 на сферических опорах. При перемещении направляющие 24 опираются на свободно вращающиеся опорные ролики 25, смонтированные на заднем крае поперечины прямоугольной опорной рамы 2 с возможностью качения по этим опорным роликам 25.
В средней части каждой направляющей 24 приварены верхнее ребро с пазами 27 и нижнее ребро с пазом 28. Верхнее ребро с пазами 27 позволяет расположить миномет 4 с наделкой 9, а нижнее ребро с пазом 28 позволяет ограничить перемещение направляющих 24 при опускании миномета 4 на грунт.
При опускания портала 23 в крайнее нижнее положение, когда направляющие 24 опускаются до уровня поверхности грунта с опорой на башмаки 51, нижнее ребро с пазом 28 упирается в ограничители опорной рамы 2.
В средней части прямоугольной опорной рамы 2 приварен упор 29 для верхней поперечины поворотной рамы 21 в сложенном положении и кронштейн для контактного датчика 13.
Для крепления поворотной рамы 21 при транспортировке в отсутствии миномета 4 на поворотной раме 21 приварена серьга 30, а на пространственном каркасе 3 закреплено быстроразъемное соединение с замком для захвата и крепления серьги 30.
Для подъема поворотной рамы 21 и опускания направляющих 24 портала 23 на грунт между прямоугольной опорной рамой 2 и поворотной рамой 21 установлена цилиндрическая пружина 31 (см. чертеж фиг. 4). Пружина упирается в нижнюю чашку 32, которая качается на поперечине опорной рамы 2 и в верхнюю чашку 33 закрепленную с возможностью качания на конце подъемного рычага 34.
Опорный конец подъемного рычага 34 качается на оси соосной поперечине опорной рамы 2, с возможностью демонтажа оси качания.
На конец подъемного рычага 34 с верхней чашкой 33 опирается поперечина 35 поворотной рамы 21 с возможностью скольжения.
Для центрирования нижней чашки 32 и верхней чашки 33 вдоль пружины подъема 31, на нижней чашке 32 закреплена трубка 39 внутри которой скользит стержень 40, закрепленный на верхней чашке 33, при этом стержень 40 свободно движется в трубке 39 на нижней чашке 32.
В механизм погрузки входит лебедка 10, которая, например, болтовым соединением, закреплена на опорном кронштейне 36, приваренном в средней части на передней поперечине прямоугольной опорной рамы 2. Лебедка 10 может быть выполнена с ручным или электроприводом, а ее трос перекинут через тросовый ролик 22, ось которого соосна оси качания портала 23 на верхней поперечине поворотной рамы 21.
На конце троса лебедки 10 имеется крюк 37 для захвата петли 38 наделки 9 узла грузодержателя для подтягивания, опрокидывания и погрузки миномета 4 на направляющие 24 портала 23.
В случае невозможности использования электропривод лебедки 10, на передней поперечине прямоугольной опорной рамы, в передней части, приварен опорный кронштейн 41 для крепления лебедки механизма погрузки с ручным приводом 42 и тросом, которая устанавливается в случае полного отсутствия электропитания (см. чертеж Фиг. 1).
Для автоматического крепления ствола миномета на кронштейне пространственного каркаса 3 с ложементом 17 подвижно закреплен хомут 18 для крепления ствола миномета 5 на ложементе 17, выполнен в виде фигурного сектора 43 с двумя плечами, на одном из которых приварен хомут 18 крепления ствола миномета 5, а другой выполнен в виде плоского рычага 44 концевой сектор которого упирается в ствол миномета 5 при погрузке (см. чертежи фиг. 5 и фиг. 6).
Сектор 43 свободно качается на оси параллельной оси ствола миномета 5 уложенного на ложемент 17, имеющего в средней части отверстие для пружины 45, конец которой с натягом крепится на кронштейне пространственного каркаса 3 для ложемента 17. Для раскрытия и закрытия замка быстроразъемного соединения используется тросовый привод 46, установленный рядом с блоком управления лебедкой механизма погрузки или в торце задней части прямоугольной опорной рамы 2.
Шток 47 быстроразъемного соединения оснащен пружиной 48 обеспечивающей открытие замка 19 быстроразъемного соединения и освобождение хомута 18. Для управления открытием замка 19 быстроразъемного соединения используется перекидная рукоятка 49, одним концом закрепленная на опорной площадке 50 и к которой крепится конец троса привода 46. Другой конец троса привода 46 закреплен на торце штока 47.
Заявляемая платформа 1 для перевозки миномета 4 с механизмом погрузки загружается на транспортное средство 16, жестко крепится болтовым соединением в грузовой платформе 15, и выдвигается на позицию для погрузки миномета 4 (см. чертеж Фиг. 3).
Для погрузки миномета 4, транспортное средство 16 подъезжает к миномету 4 (см. рисунок а на чертеже Фиг. 3), бойцами расчета, ствол миномета 5 поднимается в вертикальное положение, ноги двуноги-лафета 6 и опорная плита 7 закрепляются в трубчатой раме наделки 9 грузодержателя, крюк 37 троса лебедки 10 механизма погрузки закрепляется на петле 38 трубчатой рамы 9 наделки (см. рисунок б на чертеже Фиг. 3).
При натяжении троса работающей лебедки 10, происходит опрокидывание минометна 4 на продольные направляющие 24 портала 23. Дальнейшее натяжение троса приводит к подъему миномета 4 до момента попадания торцевых трубчатых кронштейнов 27 трубчатой рамы наделки 9 грузодержателя в пазы верхнего ребра с пазами 27 (см. рисунок в на чертеже Фиг. 3).
При дальнейшей выборке троса лебедки 10, происходит подъем миномета 4 вместе с направляющими 24 и порталом 23, с поворотом поворотной рамы 21, и сжатием пружины 31, до момента укладки ствола миномета 5 в ложемент 17 и упора направляющих 24 в упоры 29 на опорной раме 2 и срабатывания датчика 13 (см. рисунок г на чертеже Фиг. 3).
Для автоматического крепления ствола миномета 5 на ложементе 17 при опускании ствола миномета 5 концевой сектор плоского рычага 44 упирается в ствол миномета 5, растягивается пружина 45, фигурный сектор 43 поворачивается и хомут 18 прижимает ствол миномета 5 к ложементу 17.
Для закрытия замка 19 быстроразъемного соединения используется тросовый привод 46, с перекидной рукояткой 49 опорная площадка 50 которой установлена рядом с блоком управления 12 лебедкой 10 механизма погрузки в торце задней части прямоугольной опорной рамы 2. Перекидная рукоятка 49 поворачивается и через трос привода 46 сжимает пружину 48, а шток 47 закрывает замок 19, плотно прижимая хомутом 18 ствол миномета 5 к ложементу 17 (см. чертежи фиг. 5 и фиг. 6).
Лебедка 10 останавливается после чего ствол миномета 5 фиксируется замком 19 быстроразъемного соединения, а расположение опорной плиты 7 миномета 4 между продольных направляющих 24 портала 23 предотвращает перемещения опорной плиты 7 при транспортировке, при этом обеспечивается размещения миномета 4 в габаритах прямоугольной опорной рамы 2.
Для разгрузки миномета 4 освобождается замок 19 быстроразъемного соединения для чего перекидная рукоятка поворачивается в противоположную сторону и трос привода 46 освобождает шток 47, под действием пружины 48 замок 19 открывается.
Под действием пружины 45 сектор 43 поворачивается на оси и хомут 18 освобождает ствол миномета 5 с ложемента 17. Под действием пружины 31 поворотная рама 21 поворачивается, продольные направляющие 24 портала 23 скатываются по роликам 25 на задней поперечине опорной рамы 2 и опускаются до упора башмаков 51 в поверхность грунта, при этом с барабана лебедки 10 разматывается трос.
Миномет 4 опускается до соприкосновения и установки опорной плиты 7 на грунт, после чего петля 38 на наделке 9 освобождается от крюка 37 троса лебедки 10. Шасси транспортного средства 16 отъезжает. Освобождаются ноги двуноги лафета 6, освобождается опорная плита 7 и ствол миномета 5 разворачивается для боевого применения.
Предложенная конструкция платформы для перевозки миномета с механизмом погрузки может быть использована для перевозки тяжелых 120-мм минометов, выполненных по схеме «мнимого треугольника», и оснащенных грузодержателем, например, в виде наделки на ствол миномета по заявке № 2024124875 от 26.08.2024 г., позволяющей закрепить ноги лафета и зафиксировать опорную плиту миномета.
При оснащении миномета иными элементами для крепления грузозахвата лебедки, например, в виде петли из металлического троса или веревки, охватывающей ствол миномета ниже фланца крепления двуноги-лафета, предложенная платформа с направляющими, позволяет осуществить погрузку миномета для перевозки без демонтажа опорной плиты. При необходимости трос лебедки охватывает ствол миномета ниже фланца крепления двуноги-лафета и по направляющим платформы осуществляется погрузка миномета на транспортное средство.
Изготовлен опытный образец платформы для перевозки 120-мм миномета и при проведении испытаний использование предлагаемой платформы позволило повысить эффективность боевого применения миномета, за счет обеспечения минимальных затрат усилий расчета миномета, времени для развертывания и свертывания миномета на позиции с минимальными физическими затратами сил бойцов минометного расчета.
Норматив на оставление минометным расчетом огневой позиции составляет 3 мин 30 сек. При загрузке 120 мм минометов в кузова автомобилей нормы времени увеличиваются на 2 мин.
Норматив времени на при развертывании миномета с предложенной конструкции платформы для перевозки был сокращен в три раза до 1 минуты.
Изготовленный опытный образец платформы предлагаемой конструкции прошел испытания, предусматривающие погрузку, разгрузку, перевозку 120-мм миномёта с наделкой и без с подтверждением заявленного технического результата.
| название | год | авторы | номер документа |
|---|---|---|---|
| Револьверный миномет | 2023 |
|
RU2823657C1 |
| АРТИЛЛЕРИЙСКОЕ ОРУДИЕ | 2005 |
|
RU2307306C1 |
| МИНОМЕТ И СПОСОБ УСТАНОВКИ МИНОМЕТА НА ОГНЕВОЙ ПОЗИЦИИ | 2002 |
|
RU2219468C1 |
| СПОСОБ СТРЕЛЬБЫ МИНОЙ И УСТРОЙСТВО, РЕАЛИЗУЮЩЕЕ ЕГО | 2021 |
|
RU2789915C1 |
| КАЗНОЗАРЯДНЫЙ МИНОМЕТ | 1995 |
|
RU2102681C1 |
| КОМПЛЕКСНЫЙ ТРЕНАЖЕР ДЛЯ ПОДГОТОВКИ МИНОМЕТНЫХ ПОДРАЗДЕЛЕНИЙ | 2016 |
|
RU2612083C1 |
| Многоствольный миномет | 2022 |
|
RU2796065C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕВОЗКИ СУПЕРКОНТЕЙНЕРОВ С РАЗРЯДНЫМИ И ЭКОЛОГИЧЕСКИ ОПАСНЫМИ ГРУЗАМИ | 2013 |
|
RU2550940C1 |
| ГРУЗОВАЯ ПЛАТФОРМА СОРТИМЕНТОВОЗНОГО КРАНА-МАНИПУЛЯТОРА | 1996 |
|
RU2124446C1 |
| Транспортное средство для перевозки аварийных транспортных средств | 1987 |
|
SU1572860A1 |





Платформа для перевозки миномета с механизмом погрузки выполнена в виде прямоугольной опорной рамы с пространственным каркасом из металлопрофиля с узлами погрузки и крепления миномета в кузове транспортного средства с возможностью монтажа и демонтажа. Установлен механизм для выполнения погрузки и выгрузки миномета в собранном и оснащенном для стрельбы виде с закрепленным на стволе узлом грузодержателя в виде рамы несъемной наделки или элементом для крепления грузозахватного устройства. Механизм погрузки оснащен лебедкой, которая может быть выполнена с ручным или электроприводом. Технический результат - сокращение времени для развертывания тяжелого миномета на огневой позиции, сокращение минометного расчета для занятия огневой позиции, сокращение времени погрузки-выгрузки миномета на огневой позиции с платформы, обеспечение возможности переоборудования грузового транспортного средства и его боевого использования, увеличение возимого боезапаса. 5 з.п. ф-лы, 6 ил.
1. Платформа для перевозки миномета, содержащая опорную раму с ложементами и устройством крепления миномета для его транспортировки, отличающаяся тем, что платформа выполнена в виде прямоугольной опорной рамы с пространственным каркасом из металлопрофиля с узлами погрузки и крепления в кузове транспортного средства с возможностью монтажа и демонтажа, с механизмом для выполнения погрузки и выгрузки собранного и оснащенного для стрельбы миномета, в передней части, посередине, приварен опорный кронштейн для закрепления, например, болтовым соединением лебедки механизма погрузки, которая может быть выполнена с ручным или электроприводом, в передней верхней части пространственного каркаса опорной платформы приварен элемент крепления ствола миномета в собранном виде с двуногой-лафетом и опорной плитой, прицельным приспособлением, предохранителем от двойного заряжания, с закрепленным на стволе узлом грузодержателя в виде рамы несъемной наделки или элементом для крепления грузозахватного устройства, например, в виде замкнутой петли из троса, с хомутом для фиксации ствола и с замком быстроразъемного соединения, для открытия и закрытия которого используется тросовый привод дистанционного управления, механизм погрузки миномета имеет прямоугольную поворотную раму из металлопрофиля, качающуюся в средней части опорной рамы платформы с пружиной между поворотной рамой и опорной рамой платформы, пространственную подвижную раму из металлопрофиля, на которую опирается миномет при погрузке и транспортировке с двумя направляющими, верхние концы которых подвижно закреплены на торцах поворотной рамы, а на нижних концах закреплены опорные башмаки на сферических опорах, на передней поперечине прямоугольной опорной рамы, трос лебедки механизма погрузки перекинут через ролик, на верхней поперечине поворотной рамы на конце троса лебедки механизма погрузки имеется крюк для захвата петли наделки грузодержателя миномета для подтягивания, опрокидывания и погрузки миномета на направляющие пространственной подвижной рамы.
2. Платформа для перевозки миномета по п. 1, отличающаяся тем, что для управления электроприводом лебедки в задней части опорной рамы платформы закреплен, например, болтовым соединением блок управления электроприводом лебедки, который соединяется электрическими проводами с контактным датчиком упора на пространственном каркасе, с возможностью соединения с системой электроснабжения транспортного средства или с внешним источником электропитания, для автономной работы на конструктивных элементах в передней части опорной рамы платформы закреплен, например, болтовым соединением блок питания с аккумуляторными батареями, соединенный электрическим кабелем с блоком управления и электроприводом лебедки, корневой участок троса на барабане лебедки, длиной не менее десяти диаметров барабана, окрашен в красный цвет для индикации бойцам минометного расчета о длине выпущенного троса и о необходимости отключения лебедки, блок управления лебедкой выполнен с возможностью управлять направлением и скоростью вращения электропривода лебедки для намотки или выпуска троса, электродвигатель привода лебедки оснащен ограничителем по току потребления для предотвращения повреждения обмоток электродвигателя и остановки электродвигателя в автоматическом режиме, при необходимости блок управления лебедкой может быть установлен в любом удобном месте в кузове транспортного средства или в кабине для дистанционного управления погрузкой и выгрузкой миномета, дополнительно для остановки лебедки при погрузке тяжелого миномета на упоре для поворотной рамы установлен контактный датчик, выполненный с возможностью срабатывания при соприкосновении с поворотной рамой, электропривод лебедки механизма погрузки может быть выполнен на основе электродвигателя с вентильным управлением с защитой электродвигателя лебедки по току.
3. Платформа для перевозки миномета по п. 1, отличающаяся тем, что на передней поперечине прямоугольной опорной рамы, в средней части, приварен опорный кронштейн для закрепления, например, болтовым соединением отдельной лебедки механизма погрузки с ручным приводом и с тросом, которая устанавливается в случае полного отсутствия электропитания, что позволяет осуществить погрузку миномета силами бойцов минометного расчета.
4. Платформа для перевозки миномета по п. 1, отличающаяся тем, что в пружине, поднимающей поворотную раму, для центрирования чашек пружины на нижней закреплена трубка, внутри которой скользит стержень, закрепленный на верхней чашке, закрепленной на рычаге, при этом стержень свободно движется в трубке на нижней чашке пружины.
5. Платформа для перевозки миномета по п. 1, отличающаяся тем, что хомут для крепления ствола миномета на ложементе выполнен в виде фигурного сектора с двумя плечами, на одном из которых приварен хомут крепления ствола миномета, а другой выполнен в виде плоского рычага, концевой сектор которого упирается в ствол миномета при погрузке, сектор свободно качается на оси, параллельной оси ствола миномета, уложенного на ложемент, имеющий в средней части отверстие для пружины, конец которой с натягом крепится на кронштейне для ложемента, вследствие чего хомут откидывается и позволяет уложить ствол миномета на ложемент, при этом ствол миномета нажимает на концевой сектор плоского рыча и хомут охватывает ствол миномета полностью в момент соприкосновения ствола с ложементом, после чего замок быстроразъемного соединения закрывается и прижимает хомут для фиксации ствола миномета, для раскрытия и закрытия замка быстроразъемного соединения используется тросовый привод, установленный рядом с блоком управления лебедкой механизма погрузки или в торце задней части прямоугольной опорной рамы, шток быстроразъемного соединения оснащен пружиной, обеспечивающей открытие замка быстроразъемного соединения и освобождение хомута.
6. Платформа для перевозки миномета по п. 1, отличающаяся тем, что продольные направляющие пространственной подвижной рамы имеют телескопическую конструкцию в виде отрезков профиля, вставленных в направляющие, выдвижение которых ограничивается подпружиненными штифтами, переставляемыми по отверстиям в направляющих, что позволяет устанавливать платформу на транспортное средство с увеличенной погрузочной высотой и обеспечить погрузку миномета, при этом концы телескопических направляющих могут опускаться до упора в грунт башмаками на конце направляющих или в дополнительные опорные башмаки увеличенной площади при выполнении погрузочно-разгрузочных операций.
| US 7140290 B2, 28.11.2006 | |||
| Двухосный автомобиль | 1924 |
|
SU2024A1 |
| Токарный резец | 1924 |
|
SU2016A1 |
| Криоаппликатор | 1980 |
|
SU906553A1 |
| КАЗНОЗАРЯДНЫЙ МИНОМЕТ | 1995 |
|
RU2102681C1 |
| СПОСОБ ИСПЫТАНИЯ УПРУГОГО ПОДВЕСА ГЕНЕРАТОРНОГО ВИБРОДАТЧИКА НА МЕХАНИЧЕСКУЮПРОЧНОСТЬ | 0 |
|
SU182911A1 |

