Область техники, к которой относится изобретение
Настоящее изобретение относится к протоколам, устройству и способам для передачи данных при направленном бурении.
Уровень техники
Настоящее изобретение, в общем, относится к области направленного бурения и, более конкретно, к усовершенствованным протоколам, устройству и способам для передачи данных при направленном бурении.
Технология, которая часто называется горизонтальным направленным бурением (ГНБ), может использоваться с целью установки коммунального оборудования без необходимости рыть траншею. Типичная установка коммунального оборудования подразумевает использование бурового станка, имеющего бурильную колонну, на которой установлен бурильный инструмент на дистальном конце или на подземном конце бурильной колонны. Буровой станок проталкивает бурильный инструмент сквозь землю, прикладывая осевую силу к бурильной колонне. Бурильным инструментом управляют по мере удлинения бурильной колонны для формирования направляющей скважины. После завершения направляющей скважины дистальный конец бурильной колонны прикрепляют к устройству обратной тяги, которое, в свою очередь, прикреплено к переднему концу коммунального оборудования. Устройство обратной тяги и коммунальное оборудования затем протягивают через направляющую скважину путем отвода бурильной колонны, для завершения установки. В некоторых случаях устройство обратной тяги может содержать обратный развертывающий инструмент, который используется для расширения диаметра направляющей скважины перед коммунальным оборудованием, при этом устанавливаемое коммунальное оборудование может быть большего диаметра, чем оригинальный диаметр направляющей скважины.
Наведение бурильного инструмента может выполняться хорошо известным способом путем ориентирования асимметричной стороны бурильного инструмента для отклонения в требуемом направлении в земле, в соответствии с движением вперед. Для управления таким наведением желательно отслеживать ориентацию бурильного инструмента на основе показаний датчика, получаемых с помощью датчиков, которые формируют часть электронного блока, который установлен на бурильном инструменте. Показания датчика, например, могут быть модулированы на сигнал определения местоположения, который передается электронным блоком, для приема над землей с помощью портативного локатора или другого соответствующего, находящегося над землей, устройства. В некоторых системах электронный блок может подавать сигнал несущей, модулированный показаниями датчика, в бурильную колонну с тем, чтобы затем передавать сигнал в буровой станок, используя бурильную колонну в качестве электрического проводника. Независимо от способа передачи данных датчика и от заданной величины мощности передачи, существует ограничение дальности передачи, на которой данные датчика могут быть получены с достаточной точностью. Дальность передачи может все еще быть дополнительно ограничена таким факторами, как, например, электромагнитные помехи, которые присутствуют в области работы. В одном из подходов предшествующего уровня техники, при попытке увеличения дальности передачи, просто увеличивали мощность передачи. Заявители, однако, считают, что такой подход может иметь ограниченное значение, в частности, когда электронный блок, находящийся под землей, работает от батареи, как дополнительно будет описано ниже. Другой подход состоит в уменьшении скорости передачи данных или скорости, с которой данные модулируют на сигнал определения местоположения. К сожалению, такой подход приводит к уменьшению пропускной способности при передаче данных.
Представленные выше примеры предшествующего уровня техники и ограничений, связанных с ними, должны быть иллюстративными, а не исключающими. Другие ограничения предшествующего уровня техники будут понятны для специалистов в данной области техники после чтения описания и изучения чертежей.
Раскрытие изобретения
Следующие варианты осуществления и их аспекты описаны и представлены совместно с системами, инструментами и способами, которые считаются примерными и иллюстративными, а не ограничивающими объем. В различных вариантах осуществления одна или больше из описанных выше проблем были уменьшены или устранены, в то время как другие варианты осуществления направлены на другие улучшения.
В одном аспекте раскрытия, описаны устройство и соответствующий способ для использования совместно с системой, предназначенной для выполнения операции под землей, в которой бурильная колонна продолжается от бурового станка до находящегося под землей инструмента таким образом, что протягивание и отвод бурильной колонны, в общем, приводят к соответствующим движениям находящегося под землей инструмента во время операции под землей. Передатчик выполнен с возможностью его перемещения рядом с находящимся под землей инструментом для определения множества рабочих параметров, относящихся к находящемуся под землей инструменту и для обработки сигнала данных, который характеризует один или больше из рабочих параметров для передачи от находящегося под землей инструмента, на основе рабочего статуса находящегося под землей инструмента. Приемник может быть установлен в определенном местоположении над землей для приема сигнала данных и для получения рабочих параметров.
В другом аспекте описаны передатчик и соответствующий способ для использования совместно с приемником, как часть системы для выполнения работы под землей, в которой бурильная колонна продолжается от бурового станка до находящегося под землей инструмента, на котором установлен передатчик, таким образом, что протягивание и отвод бурильной колонны, в общем, приводит к соответствующим движениям находящегося под землей инструмента во время операции под землей. Передатчик включает в себя, по меньшей мере, один датчик для определения одного или больше рабочих параметров, относящихся к рабочему статусу находящегося под землей инструмента, и процессор, выполненный с возможностью обработки сигнала данных для передачи из передатчика на основе рабочего статуса находящегося под землей инструмента.
В еще одном, другом аспекте раскрытия описаны приемник и соответствующий способ для использования совместно с передатчиком, как часть системы для выполнения операции под землей, в которой бурильная колонна продолжается от бурового станка до находящегося под землей инструмента, на котором установлен передатчик таким образом, что протягивание и отвод бурильной колонны, в общем, приводит к соответствующим движениям находящегося под землей инструмента во время операций под землей. Приемник выполнен с возможностью приема сигнала данных, который передает передатчик, и этот сигнал данных характеризует один или больше рабочих параметров, относящихся к рабочему статусу находящегося под землей инструмента таким образом, что сигнал данных обрабатывают на основе рабочего статуса. Процессор выполнен с возможностью декодировать обработанный сигнал данных для получения одного или больше рабочих параметров.
В еще одном аспекте настоящего раскрытия описаны передатчик и соответствующий способ для использования совместно с системой для выполнения операции под землей, в которой бурильная колонна продолжается от бурового станка до находящегося под землей инструмента таким образом, что протягивание и/или вращение бурильной колонны приводит к движению находящегося под землей инструмента вдоль проходящего под землей пути, подвергая находящийся под землей инструмент механическим ударам и вибрации. Акселерометр, как часть передатчика, определяет ориентацию тангажа находящегося под землей инструмента в каждом из диапазона с высоким разрешением и диапазона с низким разрешением, на который воздействует механические удары и вибрация, для получения последовательности показаний тангажа. Процессор выполнен с возможностью отслеживания последовательности показаний тангажа и, в ответ на это, выбора одного из диапазона с высоким разрешением и диапазона с низким разрешением, для характеризации ориентации тангажа и для усреднения последовательности показаний тангажа в выбранном одном из диапазона с высоким разрешением и диапазона с низким разрешением, для генерирования среднего значения показаний тангажа для передачи через передатчик.
В следующем аспекте настоящего раскрытия описаны передатчик и соответствующий способ для использования совместно с системой, для выполнения операции под землей, при которой бурильная колонна продолжается от бурового станка до находящегося под землей инструмента таким образом, что протягивание и/или вращение бурильной колонны приводит к движению находящегося под землей инструмента вдоль пути под землей, подвергая находящийся под землей инструмент механическим ударам и вибрации. Акселерометр формирует часть передатчика для определения ориентации тангажа находящегося под землей инструмента, для получения последовательности показаний тангажа. Процессор выполнен с возможностью усреднения последовательности показаний тангажа, для генерирования среднего показания тангажа для передачи через передатчик.
В дополнительном аспекте настоящего раскрытия учитывается, что избирательно могут использоваться передовые протоколы передачи данных, например, для улучшения частоты обновления одного или больше параметров, которые используются в отношении отслеживания находящегося под землей инструмента. Такие усовершенствованные протоколы данных могут обеспечивать существенное уменьшение количества данных, которое необходимо для эффективной характеризации заданного параметра, например, на основе изменения разрешающей способности параметра таким образом, что требуется меньшее количество битов данных. В качестве неограничительного примера, описаны передатчик и соответствующий способ для использования совместно с приемником, как части системы для выполнения операции под землей, в которой бурильная колонна продолжается от бурового станка до находящегося под землей инструмента, на котором установлен передатчик таким образом, что протягивание и отвод бурильной колонны, в общем, приводит к соответствующим движениям находящегося под землей инструмента во время операции под землей. По меньшей мере, один датчик формирует часть передатчика для определения одного или больше параметров операций, относящихся к находящемуся под землей инструменту. Процессор выполнен с возможностью передачи данных, относящихся к одному или больше рабочим параметрам в стандартном режиме и в альтернативном режиме, таким образом, что альтернативный режим характеризует, по меньшей мере, определенный один из операционных параметров, используя количество битов, которое меньше, чем количество битов, которое характеризует определенный параметр в стандартном режиме, при этом альтернативный режим представляет определенный параметр с более низким разрешением, чем стандартный режим.
В другом аспекте настоящего раскрытия описаны передатчик и соответствующий способ для использования совместно с приемником, как часть системы, для выполнения операции под землей, в которой бурильная колонна продолжается от бурового станка до находящегося под землей инструмента, на котором установлен передатчик таким образом, что протягивание и отвод бурильной колонны, в общем, формируют соответствующие движения находящегося под землей инструмента во время операции под землей. По меньшей мере, один датчик формирует часть передатчика для определения одного или больше рабочих параметров, относящихся к находящему под землей инструменту. Процессор выполнен с возможностью передачи сигнала данных через передатчик, используя множество протоколов пакетной передачи данных, включающих в себя конкретный протокол, в котором, в соответствии с определением неподвижного состояния передатчика, используется фиксированный фрейм данных для характеризации одного или больше рабочих параметров, и многократно передает фиксированный фрейм.
Краткое описание чертежей
Примерные варианты осуществления представлены на фигурах, показанных на чертежах. Предполагается, что варианты осуществления и фигуры, раскрытые здесь, должны быть скорее иллюстративными, а не ограничительными.
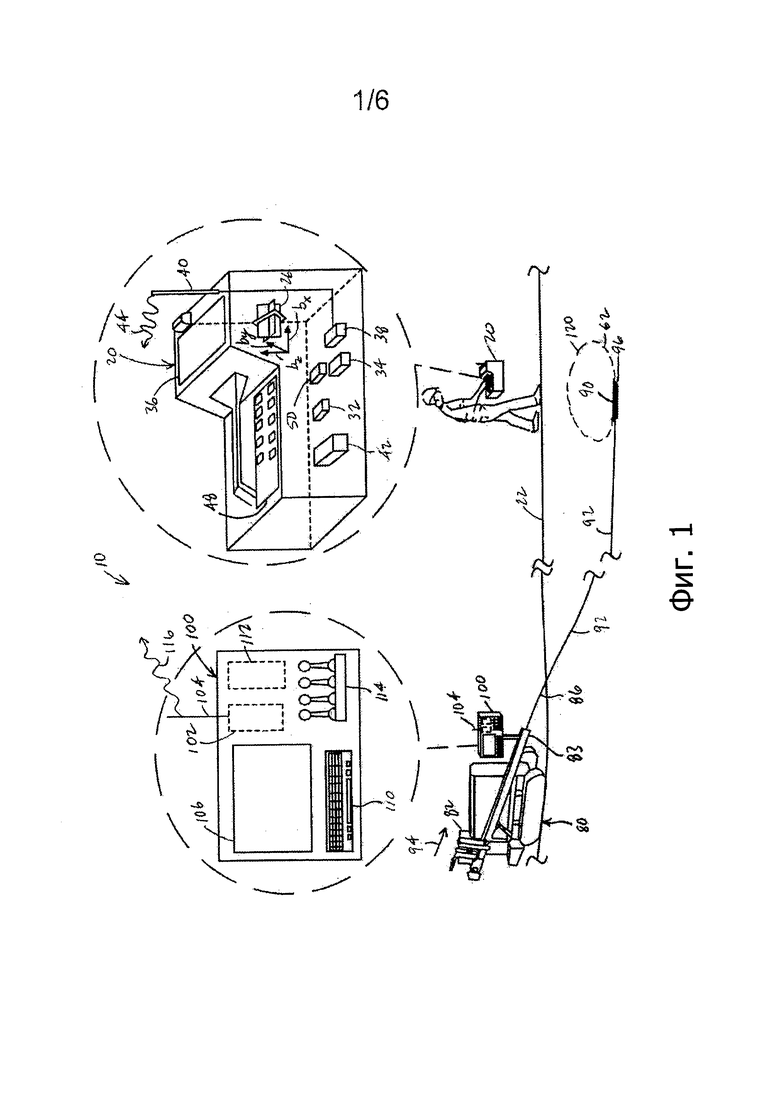
На фиг. 1 схематично показан на виде в вертикальной проекции вариант осуществления системы для выполнения операции под землей, в которой используются усовершенствованные протоколы передачи данных между находящимся под землей передатчиком и портативным устройством, в соответствии с настоящим раскрытием.
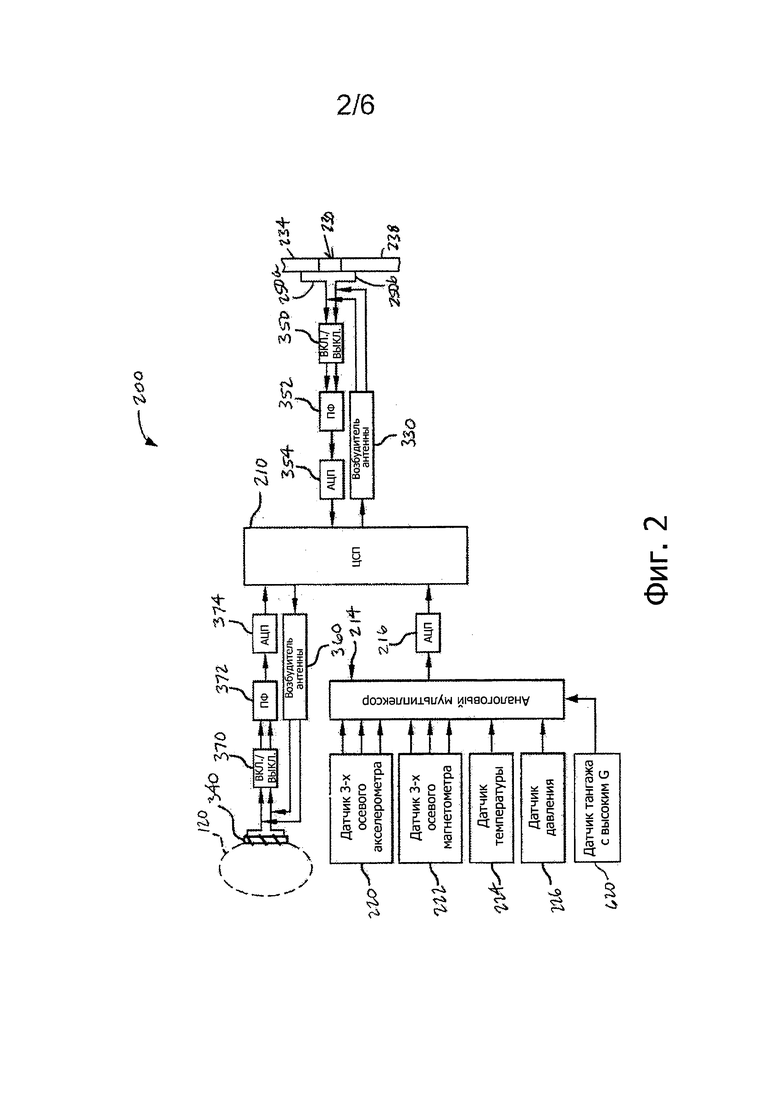
На фиг. 2 показана блок-схема, которая иллюстрирует вариант осуществления электронного блока, который может перемещаться находящимся под землей инструментом и может быть воплощен в соответствии с настоящим раскрытием.
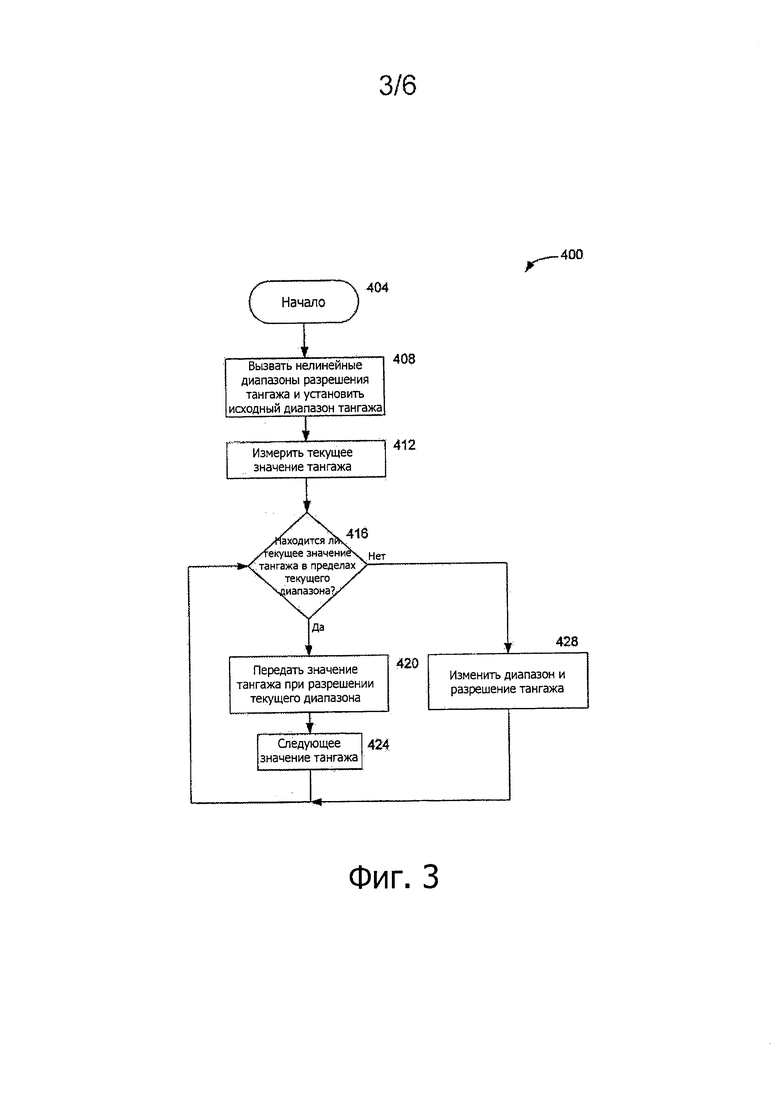
На фиг. 3 показана блок-схема последовательности операций, иллюстрирующая вариант осуществления способа для отслеживания тангажа находящегося под землей инструмента и применения нелинейного распределения диапазона тангажа.
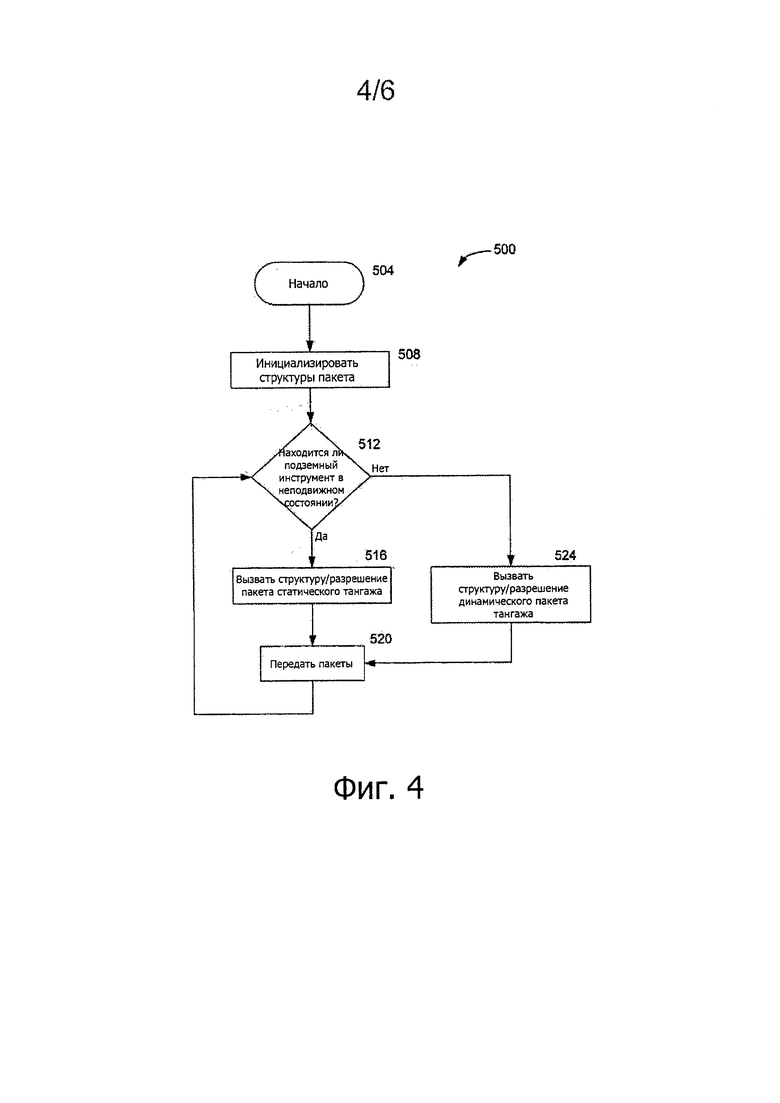
На фиг. 4 показана блок-схема последовательности операций, иллюстрирующая вариант осуществления способа для настройки структуры пакета для передачи пакетов из находящегося под землей инструмента на основе рабочих условий или статуса находящегося под землей инструмента.
На фиг. 5 показана блок-схема последовательности операций, иллюстрирующая вариант осуществления способа для динамического запроса фиксированной длины пакета для усреднения по множеству, в соответствии с рабочим состоянием находящегося под землей инструмента.
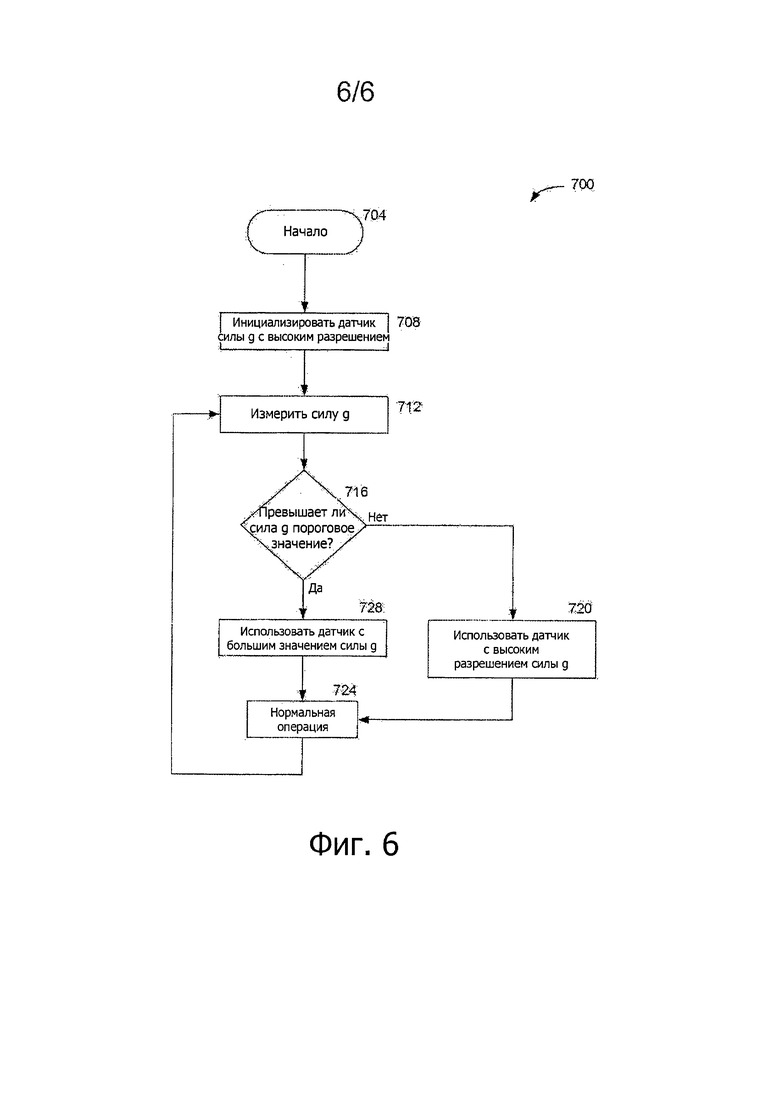
На фиг. 6 показана блок-схема последовательности операций, иллюстрирующая вариант осуществления способа для динамической настройки определения силы g, для увеличения динамического диапазона на основе рабочих условий, с которыми сталкивается находящийся под землей инструмент.
Осуществление изобретения
Следующее описание представлено для обеспечения для специалиста среднего уровня возможности изготовления и использования изобретения и предусмотрено в контексте патентной заявки и ее требований. Различные модификации для описанных вариантов осуществления будут понятны для специалиста в данной области техники, и обобщенные принципы, описанные здесь, могут применяться для других вариантов осуществления. Таким образом, настоящее изобретение не предназначено для ограничения показанным вариантом осуществления, но его следует понимать в самом широком объеме, который соответствуют принципам и признакам, описанным здесь, включающим в себя модификации и эквиваленты. Следует отметить, что чертежи выполнены не в масштабе и являются схематичными по своей сути, таким образом, как считается, они наилучшим образом иллюстрируют свойства, представляющие интерес. Описательная терминология может быть принята с целью улучшения понимания читателем различных видов, представленных на чертежах, и при этом она никоим образом не является ограничительной.
Возвращаясь теперь к чертежам, на которых одинаковые элементы могут быть обозначены одинаковыми номерами ссылочных позиций на различных чертежах, в данный момент внимание направлено на фиг. 1, на которой представлен один вариант осуществления системы для выполнения операций под землей, в общем, обозначенной номером 10 ссылочной позиции. Система включает в себя портативное устройство 20, которое показано удерживаемым оператором над поверхностью 22 земли, а также на дополнительном увеличенном виде-вставке. Следует отметить, что проводное соединение между компонентами в устройстве 20 не было представлено для поддержания иллюстративной ясности, но следует понимать, что оно присутствует и может быть непосредственно выполнено специалистом, имеющим обычные навыки в области техники на основе данного общего раскрытия. Устройство 20 включает в себя блок 26 трехосевой антенны, которая измеряет три расположенных ортогонально компонента магнитного потока, которые обозначены как bx, by и bz. Один полезный антенный блок, который считается пригодным для использования здесь, раскрыт в документе US 6,005,532, который совместно принадлежит авторам настоящей заявки и представлен здесь по ссылке. Антенный блок 26 электрически соединен с приемным блоком 32. Средство 34 определения наклона может быть предусмотрено для измерения гравитационных углов, по которым могут быть определены компоненты потока в системе координат уровня.
Устройство 20 может дополнительно включать в себя графический дисплей 36, телеметрическое средство 38, имеющее антенну 40, и блок 42 обработки, взаимно соединенный, соответственно, с различными компонентами. Телеметрическое средство может передавать телеметрический сигнал 44 для приема в буровом станке. Блок обработки может включать в себя цифровой сигнальный процессор (ЦСП), который выполнен с возможностью выполнения различных процедур, необходимых во время работы. Следует понимать, что графический дисплей 36 может представлять собой сенсорный экран, чтобы способствовать выбору оператором различных кнопок, которые определены на экране, и/или может способствовать прокрутке между различными кнопками, которые определены на экране, для обеспечения выбора оператора. Такой сенсорный экран может использоваться отдельно или в комбинации с устройством 48 ввода, таким как, например, кнопочная панель. Последняя может использоваться без сенсорного экрана. Кроме того, множество вариаций устройств ввода может использоваться, и в них могут использоваться колесики прокрутки и другие соответствующие, хорошо известные формы устройства выбора. Блок обработки может включать в себя такие компоненты, как, например, один или больше процессоров, запоминающее устройство любого соответствующего типа и аналого-цифровые преобразователи. Как хорошо известно в данной области техники, последние должны быть выполнены с возможностью детектирования частоты, которая составляет, по меньшей мере, удвоенную частоту наибольшей частоты, представляющей интерес. Другие компоненты могут быть добавлены, как описано, такие как, например, магнитометр 50, который способствует определению положения относительно направления бурения, и ультразвуковые преобразователи для измерения высоты устройства над поверхностью земли.
Также, как показано на фиг. 1, система 10 дополнительно включает в себя буровой станок 80, имеющий каретку 82, установленную с возможностью перемещения вдоль длины противостоящей пары рельс 83. Находящийся под землей инструмент 90 прикреплен к противоположному концу бурильной колонны 92. В качестве неограничительного примера бурильный инструмент показан, как инструмент, находящийся под землей, и используется, как основа для настоящего описания, однако, следует понимать, что любое соответствующее находящееся под землей устройство может использоваться, таким образом, как оно есть, например, расширяющее устройство, предназначенное для использования во время операции обратного отвода, или устройство для картографирования. В общем, бурильная колонна 92 выполнена из множества съемно закрепляемых участков буровой трубы таким образом, что буровой станок может проталкивать бурильную колонну под землю, используя движение в направлении стрелки 94, и отводить бурильную колонну, в соответствии с противоположным движением. В участках буровой трубы может быть сформирован сквозной канал для перемещения бурового раствора или текучей среды, которая разбрызгивается из бурильного инструмента под давлением, с тем, чтобы способствовать бурению через землю, а также для охлаждения бурильной головки. В общем, буровой раствор также используется для задержки и вывода выбуренной породы на поверхность вдоль внешней длины бурильной колонны. Управление может быть выполнено хорошо известным способом путем ориентирования асимметричной стороны 96 бурильного инструмента для отклонения в требуемом направлении в земле, в соответствии с проталкиванием для движения вперед, которое может называться "режимом проталкивания". Вращение или кручение бурильной колонны буровым станком, в общем, может привести к перемещению вперед или прямому перемещению бурильного инструмента, что может называться режимом "кручения" или "перемещения вперед".
Буровыми работами управляет оператор (не показан) за консолью 100 управления (лучше всего видно на увеличенном виде-вставке), которая сама включает в себя приемопередатчик 102 телеметрических данных, соединенный с телеметрической антенной 104, экран 106 дисплея, устройство ввода, такое как клавиатура 110, средство 112 обработки, которое может включать в себя соответствующие интерфейсы, и запоминающее устройство, а также один или больше процессоров. Множество рычагов 114 управления, например, для управления движением каретки 82. Приемопередатчик 104 телеметрических данных может передавать телеметрический сигнал 116 с тем, чтобы способствовать двунаправленному обмену данными с портативным устройством 20. В варианте осуществления экран 106 может представлять собой сенсорный экран таким образом, что клавиатура 110 может быть не обязательной.
Устройство 20 выполнено с возможностью приема электромагнитного сигнала 120 определения местоположения, который передают из бурильного инструмента или другого находящегося под землей инструмента. Сигнал определения местоположения может представлять собой дипольный сигнал. В этом случае портативное устройство может соответствовать, например, портативному устройству, описанному в любом из патентов США №№6,496,008, 6,737,867, 6,727,704, а также в опубликованной заявке на патент США №2011-0001633, каждый из которых представлен здесь по ссылке. С учетом этих документов, следует понимать, что портативное устройство может работать либо в режиме обзорного определения местоположения, как представлено на фиг. 1, либо в режиме возврата в исходное положение, при установке портативного устройства на земле, как представлено в патенте 6,727,704. Хотя в настоящем раскрытии иллюстрируется дипольное поле определения местоположения, передаваемое из бурильного инструмента и, вращающееся вокруг оси симметрии поля, настоящее раскрытие не предназначено для ограничения в этом отношении.
Сигнал 120 определения местоположения может быть модулирован информацией, генерируемой в бурильном инструменте, включающей в себя, но без ограничений, параметры ориентации положения, на основе показаний датчика ориентации тангажа и/или крена, значения температуры, значения давления, состояния батареи, показания усилия натяжения в контексте операции обратного отвода и т.п. Устройство 20 принимает сигнал 120, используя антенную решетку 26, и обрабатывает принятый сигнал для получения данных. Следует отметить, что, в качестве альтернативы, для модуляции сигнала определения местоположения требуемая информация может быть передана по бурильной колонне до бурового станка, используя электрическую проводимость, такую как средство "провод-в-трубе". В другом варианте осуществления двунаправленная передача данных может быть выполнена путем использования самой бурильной колонны в качестве электрического проводника. Усовершенствованный вариант осуществления такой системы описан в совместно принадлежащей заявке на патент США, серийный №13/733,097, опубликованной, как опубликованная заявка США №2013/0176139, и которая представлена здесь полностью по ссылке. В любом случае вся информация может быть сделана доступной на консоли 100 в буровом станке.
На фиг. 2 показана блок-схема, которая иллюстрирует вариант осуществления электронного блока, в общем, обозначенного номером 200 ссылочной позиции, который может быть установлен в бурильном инструменте 90. Электронный блок может включать в себя подземный цифровой сигнальный процессор 210. Блок 214 датчика может быть электрически соединен с цифровым сигнальным процессором 210 через аналого-цифровой преобразователь (АЦП) 216. Любая соответствующая комбинация датчиков может быть предусмотрена для заданного варианта применения и может быть выбрана, например, из акселерометра 220, магнитометра 222, датчика 224 температуры и датчика 226 давления, которые могут определять давление бурового раствора перед его разбрызгиванием из бурильной колонны и/или в пределах кольцевой области, окружающей скважинный участок бурильной колонны. В варианте осуществления, в котором передача данных к буровому станку осуществляется путем использования бурильной колонны в качестве электрического проводника, изолятор 230 формирует электрически изолирующее соединение в бурильной колонне и схематично показан, как отделяющий, находящейся сверху участок 234 бурильной колонны от находящего внутри скважины участка 238 бурильной колонны для использования в одном или обоих из режима передачи, в котором данные подключают к бурильной колонне, и режима приема, в котором данные получают из бурильной колонны. В некоторых вариантах осуществления электрическая изоляция может быть предусмотрена, как часть находящегося под землей инструмента. Электронный блок может быть соединен, как представлено и показано, через электрически изолирующий/изоляционный разрыв, сформированный изолятором, с использованием первого вывода 250а и второго вывода 250b, которые могут быть совместно обозначены номером 250 ссылочной позиции. Для режима передачи используется блок 330 возбуждения антенны, который электрически соединен между цифровым сигнальным процессором 210, находящимся под землей, и выводом 250 для непосредственного привода бурильной колонны. В общем, данные, которые могут быть переданы по бурильной колонне, могут быть модулированы, используя частоту, которая отличается от любой частоты, которая используется для возбуждения дипольной антенны 340, которая может излучать описанный выше сигнал 120 (фиг. 1), для исключения взаимных помех. Когда возбудитель 330 антенны выключен, переключатель 350 (ВКЛ./ВЫКЛ.) включения/выключения может избирательно соединять вывод 250 с полосовым фильтром (ПФ) 352, центральная частота которого соответствует центральной частоте сигнала данных, который принимают из бурильной колонны. ПФ 352, в свою очередь, соединен с аналого-цифровым преобразователем (АЦП) 354, который сам по себе соединен с блоком 210 обработки цифрового сигнала. В одном варианте осуществления блокирующий постоянный ток фильтр защиты от наложения спектров может использоваться вместо полосового фильтра. Получение модулированных данных в блоке обработки цифровых сигналов может быть непосредственно выполнено специалистом среднего уровня в данной области техники с учетом определенной формы модуляции, которая используется с учетом данного общего раскрытия.
Также, как показано на фиг. 2, дипольная антенна 340 может быть подключена для использования в одном или обоих из режима передачи, в котором сигнал 120 передают в окружающую землю, и режима приема, в котором принимают электромагнитный сигнал, такой как сигнал от находящегося под землей инструмента, такого как, например, датчик натяжения. Для режима передачи используется блок 360 возбуждения антенны, который электрически включен между находящимся под землей цифровым сигнальным процессором 210 и дипольной антенной 340 для возбуждения антенны. И снова, частота сигнала 120, в общем, будет существенно отличаться от частоты сигнала бурильной колонны, для исключения взаимной помехи между ними. Когда возбудитель 360 антенны отключен, переключатель (ВКЛ./ВЫКЛ.) 370 включения/выключения может избирательно подключать дипольную антенну 340 к полосовому фильтру (ПФ) 372, центральная частота которого совпадает с центральной частотой сигнала данных, принимаемых от дипольной антенны. В варианте осуществления блокирующий постоянный ток фильтр защиты от наложения спектров может использоваться вместо полосового фильтра. ПФ 372, в свою очередь, подключен к аналого-цифровому преобразователю (АЦП) 374, который в свою очередь, подключен к блоку 210 цифровой обработки сигналов. Электронная схема приемопередатчика для блока цифровой обработки сигналов может быть легко выполнена с использованием множества соответствующих вариантов осуществления специалистом среднего уровня в данной области техники, с учетом, в частности, формы или форм модуляции, используемой с учетом этого общего раскрытия. Конструкция, показанная на фиг. 2, может быть модифицирована любым соответствующим образом, с учетом описания, которое было здесь представлено.
Снова, как показано на фиг. 1, дальность передачи, на которой сигнал 120 определения местоположения может быть принят портативным устройством 20, обратно пропорциональна кубу расстояния. При увеличении мощности передачи от находящегося под землей инструмента увеличивается дальность передачи, при этом следует понимать, что удвоение мощности передачи приводит только к 15%-ому увеличению дальности передачи. Конечно, при этом может происходить существенное уменьшение времени работы батареи в соответствии с таким увеличением мощности, когда передатчик, установленный в подземном инструменте, работает от батареи. Кроме того, на диапазон приема может в значительной степени влиять локальная помеха. Гармонические шумы линии электропередач на частоте (n×50) Гц и (n×60) Гц могут представлять собой существенный источник шумов. В прошлом несущую частоту для сигнала 120 определения местоположения тщательно выбирали, чтобы исключить гармоники линии электропередач. В некоторых случаях, исключение гармоник линии электропередач может потребовать сужения полосы пропускания для данных, которые модулируют на сигнал 120 определения местоположения. Заявители, однако, определили, что сужение полосы пропускания данных приводит к снижению пропускной способности данных. Относительно малые значения пропускной способности данных могут представлять собой проблему в смысле достижения достаточно быстрого обновления данных в портативном устройстве. Например, когда оператор пытается установить требуемую ориентацию по крену находящегося под землей инструмента, с целью управления, относительно медленное обновление ориентации может привести к тому, что этот процесс потребует значительного времени. Учитывая описанное выше, должно быть понятно, что исключение помехи со стороны шумов и пропускная способность представляют собой конкурирующие интересы. До сих пор Заявитель полагал, что отсутствует эффективное решение с учетом этих конкурирующих интересов. Как будет видно, Заявитель определил протоколы данных, которые являются специализированными с точки зрения работы под землей, что делает высокоэффективным использование доступной полосы пропускания данных. Следует понимать, что эти протоколы применимы для передачи, используя электромагнитный сигнал определения местоположения, или при использовании бурильной колонны в качестве электрического проводника. В то время как определенные концепции были описаны в отношении электромагнитного сигнала, такие концепции распознают, как в равной степени применимые в отношении передачи по буровой колонне.
С целью передачи данных, в соответствии с настоящим раскрытием, данные могут быть кодированы по несущей любым соответствующим способом, таким как, например, кодированные по фазе, модулированные по амплитуде, модулированные по частоте, или используя любую их соответствующую комбинацию. Определенные схемы модуляции, такие как, например, манчестерское кодирование могут быть предпочтительными в смысле поддержания энергии сигнала на частоте несущей, что улучшает дальность определения местоположения. С другой стороны, другие схемы модуляции, такие как, например, квадратурная модуляция со сдвигом по фазе (КМСФ) обеспечивают относительно высокую пропускную способность для данной полосы пропускания.
В общем, данные могут быть переданы в цифровой форме по сигналу 120 определения местоположения, используя пакетную структуру. Данные могут быть переданы, используя пакеты, которые являются специализированными для определенных типов данных. Например, разные структуры пакета могут использоваться для передачи данных крена, данных тангажа, состояния батареи, температуры, давления и т.п. Чем короче пакет, тем в меньшей степени пакет подвергается нарушениям со стороны шумов при приеме в портативном устройстве 20. Поскольку пакеты передают в портативное устройство в виде потоковой передачи, необходимо, чтобы портативное устройство было выполнено с возможностью определять начало нового пакета. Варианты осуществления пакетов, которые описаны здесь, позволяют использовать биты синхронизации с этой целью. Учитывая такие основные моменты, ряд структур уникальных пакетов будут описаны непосредственно ниже.
В таблице 1 иллюстративно представлен вариант осуществления пакета крена, в соответствии с настоящим раскрытием, в контексте манчестерского кодирования, хотя последнее не является необходимым. Традиционные пакеты крена, в качестве примера, позволяют кодировать 24 положения крена (то есть, с приращением на 15 градусов), используя дополнительные биты синхронизации, которые не участвуют в кодировании. Заявитель определил, что биты синхронизации могут использоваться так, чтобы они способствовали кодированию. В это же время, количество кодируемых положений крена может быть уменьшено для уменьшения размера пакета крена. Например, Заявитель определил, что 8 кодируемых положений крена достаточны для идентификации ориентации по крену бурильного инструмента таким образом, что требуются только 3 бита данных. В Таблице 1 иллюстрируется структура пакета крена для 8 положений крена. Каждое из L (Низкого) и Н (Высокого) значения представляет одну половину битового времени, в соответствии с манчестерским кодированием. Бит 1 из 3 битов данных представлен битом 1 синхронизации и битом 2 синхронизации. В настоящем варианте осуществления каждый бит синхронизации охватывает одно время бита и половину времени бита. Как можно видеть в таблице 1, разрешенное значение интервала синхронизации, охваченное битами 1 и 2 синхронизации, включает в себя либо 3 времени бита, с низким значением, после которых следуют 3 времени бита с высоким значением (крен 1-4) или 3 времени бита с высоким значением, после которых следует 3 времени бита с низким значением (крен 5-8). Таким образом, бит 1 синхронизации в комбинации с битом 2 синхронизации может представлять собой бит 1 данных и только два дополнительных бита 1 и 2 данных необходимы, чтобы составить 3 бита данных с целью кодирования трех значений битов. В соответствии с этим, любой вариант осуществления пакета может использовать биты синхронизации, таким образом, в качестве старшего значащего бита (СЗБ). Например, температура может быть кодирована, как нормальная, высокая и очень высокая таким образом, что биты синхронизации и только один бит данных требуются для пакета температуры. Следует понимать, что передача пакета может быть установлена с приоритетом. Например, при нормальных температурных условиях, пакет температуры может передаваться через фиксированный интервал, такой как, например, 15 секунд. Однако, когда скорость изменения температуры превышает определенное пороговое значение, пакет температуры может быть передан немедленно. Такое пороговое значение температуры, в качестве неограничительного примера, может представлять собой увеличение более чем на 10°С за 2 секунды. Пакет состояния батареи может быть кодирован, например, тремя битами данных, в дополнение к старшему значащему биту, представляемому битами 1 и 2 синхронизации.

В то время как пакеты крена часто предназначены для наиболее быстрого обновления, пакеты тангажа также передают достаточно часто. В качестве неограничительного примера один пакет тангажа может быть передан на каждые шесть пакетов крена. Традиционно, пакеты тангажа были длинными с целью определения показаний тангажа с высоким разрешением. Например, традиционные пакеты тангажа могут иметь разрешение 0,05° или 0,1%, независимо от рабочего статуса бурильного инструмента. Заявитель определил, что когда находящийся под землей инструмент вращается или просто движется, удары и вибрация могут существенно ограничить точность считываний тангажа, которая определяется акселерометрами в наборе датчиков электронного блока, который установлен на бурильном инструменте. Этот эффект дополнительно усиливается, когда бурильный инструмент продвигается в скалистой почве. На основе такого распознавания, разрешение пакета тангажа может динамически настраиваться, когда бурильный инструмент вращается и/или перемещается. Один вариант осуществления диапазонов динамического разрешения пакета тангажа представлен в таблице 2.
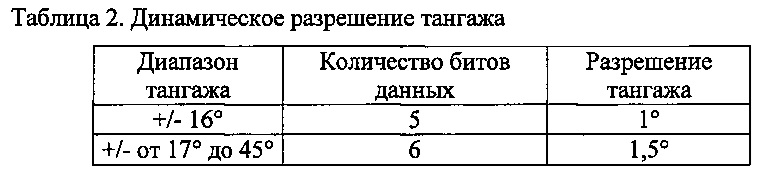
Как можно видеть в таблице 2, когда подземный инструмент находится в движении, пакет тангажа может содержать пять битов данных для определения разрешение тангажа 1° в пределах диапазона тангажа +/-16°. Если биты синхронизации используются для обозначения (+/-) знака тангажа, требуются только 4 бита данных. С другой стороны, для диапазонов +/-16°, от +17° до +45° и от -17° до -45° можно использовать шесть битов данных для определения разрешения тангажа 1,5°. Если биты синхронизации используются для обозначения знака (+/-) тангажа, требуются только 5 битов данных.
Следует понимать, что, по меньшей мере, с практической точки зрения, показания тангажа могут быть ограничены (+/-) 45°. Высокой точности показания тангажа желательны в определенных обстоятельствах, таких как, например, установка канализационного трубопровода, работающего под действием силы тяжести. В то время как не практично обеспечивать такую точность тангажа с высоким разрешением, по мере перемещения или вращения бурильного инструмента, Заявитель понимает, что практично передавать пакеты тангажа с высоким разрешением, в случае, когда детектируют, что бурильный инструмент находится в неподвижном состоянии. Конечно, такое детектирование может быть легко выполнено, используя акселерометры, которые представляют собой часть набора датчиков электронного блока в бурильном инструменте. В то же время, Заявители дополнительно осознают, что пакеты тангажа могут быть специально разработаны так, чтобы использовать биты данных с высокой эффективностью, когда бурильный инструмент или другое устройство, находящееся под землей, находится в неподвижном состоянии. В качестве неограничительного примера, разрешение тангажа может быть сжато в пределах диапазона +/-11° для обеспечения тангажа с высоким разрешением в этом диапазоне, при подаче менее напряженных значений разрешения за пределами этого диапазона (то есть, когда угол тангажа превышает 11°). В этом отношении, большинство установок канализационного трубопровода, работающего под действием силы тяжести, ограничено диапазоном +/-5%, и эта степень соответствует приблизительно +/-2,86°. Такой вариант осуществления для разрешения тангажа в неподвижных условиях представлен в таблице 3, включающей в себя множество значений, в пределах четырех разных значений тангажа для установленных значений разрешения тангажа. В сумме 509 значений необходимы, чтобы пакет тангажа, имеющий 9 битов данных, можно было использовать для охвата всех четырех из намеченных диапазонов тангажа. И снова, если биты синхронизации используются для обозначения знака, требуются только 8 битов данных.
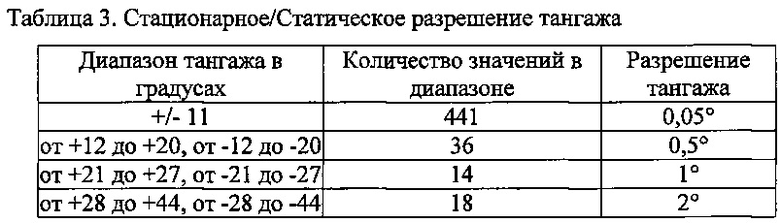
Следует понимать, что диапазоны разрешения тангажа в неподвижных условиях в Таблице 3 представлены в качестве примера и предназначены не для ограничения, но в качестве демонстрации диапазонов разрешения тангажа, которые изменяются нелинейно, с целью ограничения количества битов данных, требуемых для пакета тангажа. В представленном здесь описании может быть достигнуто существенное уменьшение размера пакета, например, порядка 1/2 (то есть, с коэффициентом 2), что переводится в существенное увеличение скорости обновления с целью отслеживания находящегося под землей инструмента при использовании узкой полосы пропускания данных, которая обеспечивает достаточную защиту от шумов.
На фиг. 3 показана блок-схема последовательности операций, иллюстрирующая один вариант осуществления способа, в общем обозначенного номером 400 ссылочной позиции, для отслеживания тангажа и с применением нелинейного распределения диапазона тангажа, например, в соответствии с таблицами 2 и 3. Способ начинается на этапе 404 и переходит на этап 408, на котором определяются диапазоны нелинейного разрешения тангажа, представляющего интерес, и устанавливает исходный один из диапазонов, в качестве начальной точки. На этапе 412 текущее значение тангажа измеряют, как вход для этапа 416. На последнем определяют, находится ли текущий тангаж в пределах текущего установленного диапазона тангажа. Если это так, на этапе 420 передают текущее значение тангажа с разрешением установленного в данный момент диапазона тангажа. Следующее значение тангажа затем получают в 424. Если на этапе 416 детектируют, что текущее показание тангажа не находится в пределах текущего установленного диапазона тангажа, операция переходит на этап 428, на котором устанавливают соответствующий диапазон тангажа в соответствии с текущими показаниями тангажа. Операция затем возвращается на этап 416.
Далее внимание будет направлено на фиг. 4, на которой показана блок-схема последовательности операций, иллюстрирующая один вариант осуществления способа, в общем, обозначенного номером 500 ссылочной позиции, для изменения структуры пакета на основе рабочих условий находящегося под землей инструмента. Способ начинается на начальном этапе 504 и переходит на этап 508, на котором инициализируют структуры пакета, предназначенные для использования при обработке. В варианте осуществления инициализация может быть основана, например, на ориентации тангажа передатчика во время запуска. В другом варианте осуществления инициализация может быть основана на взаимной помехе в рабочей области таким образом, что можно использовать описанные здесь усовершенствованные протоколы пакета с более высокой защитой от шумов/помехи. Локальные помехи, например, могут детектироваться любым соответствующим образом, включая в себя, в соответствии с описанной выше, внедренной здесь заявке США 2011-0001633, и/или как описано в опубликованной заявке США 2013/0176139, которая совместно принадлежит авторам настоящей заявки и, таким образом, представлена здесь по ссылке. Например, в заявке 2013/0176139 описано, что достаточная деградация сигнала определения местоположения может быть детектирована на основе неспособности декодировать информацию ориентации крена, информацию ориентации тангажа и/или другую информацию состояния. Кроме того, можно отслеживать частоту ошибок битов (ЧОБ) сигнала определения местоположения в отношении приемлемого порогового значения. На этапе 512 определяют рабочий статус подземного инструмента, например, путем отслеживания выходных показаний акселерометра в течение короткого периода времени. Если подземный инструмент будет неподвижным, не должен детектироваться переход ускорения. Если находящийся под землей инструмент детектируется, как неподвижный, операция переходит на этап 516, который применяет статическую структуру пакета тангажа или разрешение для пакетов тангажа, которые должны быть переданы, например, в соответствии с таблицей 3. Пакеты тангажа затем передают на этапе 520.
Если, с другой стороны, на этапе 512 определяют, что находящийся под землей инструмент не является неподвижным, обработка переходит на этап 524, на котором применяется динамическая структура пакета тангажа и разрешение, например, в соответствии с таблицей 2.
В другом варианте осуществления, когда находящийся под землей инструмент детектируется, как неподвижный, сигналы от различных датчиков ориентации (акселерометров) должны быть стабильными и без изменения. В этих условиях электронный блок может переключаться на пакет фиксированной длины или фрейм данных, который содержит любую требуемую подборку данных, такой как, например, ориентация крена, ориентация тангажа, состояние батареи и температура. Фрейм данных фиксированной длины может многократно быть передан во время неподвижного состояния бурильного инструмента, для обеспечения возможности применения усреднения по множеству, для достижения общего эффекта увеличения силы сигнала путем суммирования последовательных фреймов данных, в то время как случайные шумы в сумме будут иметь нулевое среднее значение. В этом отношении, если n представляет собой количество выборок, и шумы являются случайными, отношение сигнал-шум увеличивается, как квадратный корень из n. Другими словами, чем больше количество фреймов данных, которые будут просуммированы, тем выше становится эффективное отношение сигнал-шум. Результаты улучшаются при увеличении стабильности синхронизации электронного блока 200 и устройства 20. Можно использовать контур фазовой синхронизации в устройстве 20 для дополнительного улучшения стабильности фазовой синхронизации для несущей сигнала определения местоположения. В качестве неограничительного примера фиксированный фрейм данных может быть представлен, как SSSRRRRRPPPPPPPPPPPBBTT, где S представляет собой бит синхронизации, R обозначает бит данных крена, Р обозначает бит данных тангажа, В обозначает бит данных состояния батареи, и Т обозначает бит состояния температуры. Буфер данных в устройстве 20 может принимать многократную передачу и может сохранять фрейм, например, как PPPBBTTSSSRRRRRPPPPPPPP. По мере накопления дополнительных фреймов, например, в области большой помехи, портативное устройство может продолжать поиск битов синхронизации и, в конечном итоге, может определять местоположение битов синхронизации, как часть декодирования фрейма. Конечно, данные могут быть размещены в буфере, в буровом станке или в любом другом соответствующем местоположении, с целью декодирования. Следует отметить, что усреднение 4 пакетов или фреймов имеет эффект уменьшения шумов с коэффициентом 2. В представленном выше примере используется 5 битов для крена (32 значения для 24 положений тактовой частоты) и 11 битов для тангажа для охвата диапазона +/-45° или +/-100% при разрешении 0,1%. Как описано выше и как представлено в Таблице 3, нелинейное кодирование тангажа позволяет уменьшить количество битов, требуемых для охвата диапазона +/-45°, используя меньшее количество битов данных, например, используя 9 битов данных, в отличие от 11 битов.
В качестве еще одного другого варианта осуществления, когда на этапе 512 детектируется, что подземный инструмент не вращается и/или находится в неподвижном состоянии, передача пакетов крена может быть приостановлена, как часть общей статической структуры пакета. Передача пакетов крена может быть возобновлена в соответствии с детектированием, что подземный инструмент, по меньшей мере, вращается. В некоторых вариантах осуществления перемещение подземного инструмента может затем задерживаться до тех пор, пока пакеты крена не будут приняты во время вращения.
Далее внимание будет направлено на фиг. 5, которая представляет собой блок-схему последовательности операций, представляющую один вариант осуществления способа, в общем, обозначенного номером 600 ссылочной позиции, для динамического запуска фиксированной длины пакета для усреднения по множеству, в соответствии с рабочим состоянием находящегося под землей инструмента. Способ начинается на этапе 604 и переходит на этап 608, на котором инициализируются различные структуры пакета, которые требуется использовать на основе рабочего статуса наземного инструмента. Например, когда находящийся под землей инструмент движется, ориентация крена может быть установлена с использованием 8 положений крена, в соответствии с таблицей 1, в то время как ориентация тангажа может быть установлена, например, в соответствии с таблицей 2. Структура пакета фиксированной длины может использоваться, когда находящийся под землей инструмент не движется, например, в соответствии с описаниями, представленными непосредственно выше. Обработка затем переходит на этап 612, на котором определяется рабочий статус бурильного инструмента в смысле, находится ли он в движении или остается неподвижным. Как описано выше, в одном варианте осуществления, выходные данные акселерометра можно отслеживать в течение краткого периода времени с целью такого определения. Если определяют, что бурильный инструмент движется, операция переходит на этап 616, где осуществляется вызов структуры динамического пакета, например, в соответствии с таблицами 1 и 2. На этапе 620 пакеты передают. Операция затем возвращается на этап 612. Когда на последнем этапе определяют, что находящийся под землей инструмент является неподвижным, обработка переходит на этап 624, на котором инициируют структуру пакета фиксированной длины. На этапе 628 пакет фиксированной длины с повторениями/многократно передают для приема портативным устройством или другими соответствующими аппаратными средствами над землей. На этапе 632 принимают пакет фиксированной длины, и он может быть добавлен в буфер, как описано выше. На этапе 636 могут быть предприняты попытки декодировать значения буфера, например, для каждой итерации. В других вариантах осуществления портативное устройство может устанавливать задержку любой попытки декодирования, до тех пор, пока определенное заданное количество данных не будет накоплено в буфере. Для каждой итерации, если декодирование будет неудачным, операция возвращается на этап 632, для приема следующего пакета. После того, как будет достигнуто успешное декодирование, операция переходит на этап 640, на котором передают декодированные значения в соответствующее местоположение и затем выполняют очистку буфера. Операция затем возвращается на этап 612.
Как описано выше и со ссылкой на фиг. 2, акселерометры 220 подвергаются высоким уровням ударов и вибрации. Для того, чтобы обеспечивать считывание тангажа в режиме реального времени во время бурения, в варианте осуществления, процессор 210 может применять непрерывный фильтр для необработанных данных тангажа, для сглаживания вариаций, индуцированных ударами и вибрацией. Например, фильтрации скорости может отбрасывать более быстрые изменения тангажа, чем +/-3° в секунду. Значение +/-3° в секунду в данном примере не является обязательным, но выводится из того факта, что буровая труба, которая составляет бурильную колонну, имеет конечный радиус изгиба, таким образом, что корпус бурильного инструмента не может изменять тангаж или направление, без прохода некоторого конечного расстояния. Например, если R представляет собой ограничивающий радиус изгиба буровой трубы, S представляет длину дуги перемещения инструмента, и тета (0) представляет собой изменение угла тангажа:

Если R=100 футов и θ=3°, S=5,236 футов. Если только скорость проникновения будет выше, чем 3,57 миль в час во время управления, +/-3° в секунду должно быть адекватным значением.
В другом варианте осуществления угол тангажа может усредняться при бурении путем переключения на датчик с более высоким значением g (то есть, акселерометр), когда находящийся под землей инструмент вращается и/или движется. При бурении в скалистой породе, удары и вибрации корпуса находящегося под землей инструмента могут составлять несколько сотен g. Диапазон измерений типичных акселерометров MEMS, которые обычно используются для горизонтального направленного бурения, часто ограничены +1-2 g, из-за необходимости высокого разрешения. В результате такого ограниченного динамического диапазона, такой акселерометр может постоянно достигать своего верхнего и нижнего пределов, в зависимости от условий бурения. В неблагоприятных условиях с ограниченным динамическим диапазоном трудно получить представительное среднее значение тангажа даже при применении усреднения данных тангажа. В соответствии с этим, акселерометр 660 с малой стоимостью, большим значением g и низким разрешением (фиг. 2) может быть добавлен к датчику из набора датчиков для отслеживания среднего тангажа, когда находящийся под землей инструмент вращается. В еще одном другом варианте осуществления может использоваться акселерометр MEMS, который имеет программируемый диапазон g таким образом, что диапазон тангажа может быть перепрограммирован в процессе работы, когда условия гарантируются.
Далее, на фиг. 6, показана блок-схема последовательности операций, иллюстрирующая один вариант осуществления способа, в общем, обозначенного номером 700 ссылочной позиции, для динамической настройки чувствительности силы g, для расширения динамического диапазона на основе рабочих условий, с которыми сталкивается находящийся под землей инструмент. Способ начинается на этапе 704 и переходит на этап 708, на котором инициализируют определение данных, используя датчик высокого разрешения с ограниченным диапазоном силы g или датчик с высоким разрешением, когда используется программируемый датчик. На этапе 712 получают показания силы g (то есть, показания акселерометра). На этапе 716 показания сравнивают с пороговым значением, которое может быть основано на возможностях рабочего диапазона акселерометра, используемого в данное время. Если текущее показание находится в пределах диапазона, в способе продолжает использоваться диапазон с высоким разрешением на этапе 720, и выполняется передача показаний на этапе 724 во время нормальной работы. С другой стороны, если на этапе 716 детектируют, что текущее показание силы g превышает пороговое значение, операция переходит на этап 728 для переключения с датчика с высоким разрешением на датчик с высоким значением силы g и меньшим разрешением. Обработка затем переходит на этап 724 таким образом, что показания тангажа датчика с высоким разрешением могут быть подвергнуты усреднению по множеству для использования системой и/или представления оператору портативного устройства и/или бурового станка. Как часть нормального режима работы, процедура итеративно зациклена обратно на этап 712 для получения следующего показания акселерометра.
Представленное выше описание изобретения было представлено с целью иллюстрации и описания. При этом предполагается, что оно не является исключительным и не ограничивает изобретение раскрытыми точной формой или формами, и другие модификации и изменения могут быть возможными с учетом представленных выше описаний. Например, протоколы данных, описанные выше, могут быть выбраны вручную или автоматически. В одном варианте осуществления один или больше из описанных выше усовершенствованных протоколов данных для получения расширенного диапазона и/или для обеспечения защиты от помехи могут быть выбраны из портативного определения местоположения, другого, чем наземное устройство или из бурового станка. В другом варианте осуществления один или больше их описанных усовершенствованных протоколов данных может быть выбран на основе ориентации тангажа передатчика во время запуска. В еще одном, другом варианте осуществления, один или больше из описанных усовершенствованных протоколов данных могут быть выбраны на основе последовательности ориентации крена бурильной колонны. В соответствии с этим, для специалиста в данной области техники будут понятны определенные модификации, перемены, добавления и подкомбинации описанных выше вариантов осуществления.
Все варианты элементы, части и этапы, описанные здесь, предпочтительно включены. Следует понимать, что любые из этих элементов, деталей и этапов могут быть заменены другими элементами, частями и этапами или могут быть удалены вместе, как будет понятно для специалиста в данной области техники.
В качестве кратких итогов, в данном описании раскрыто, по меньшей мере, следующее. Передатчик перемещает рядом с находящимся под землей инструментом для определения множества рабочих параметров, относящихся к находящемуся под землей инструменту. Передатчик обрабатывает сигнал данных так, что он характеризует один или больше из рабочих параметров для передачи из находящегося под землей инструмента, на основе статуса работы находящегося под землей инструмента. Приемник принимает сигнал данных и получает рабочие параметры. Описаны усовершенствованные протоколы данных. Усреднение тангажа и улучшение динамического диапазона тангажа для считывания показаний акселерометра описано на основе отслеживаемых механических ударов и вибраций находящегося под землей инструмента.
Концепции
В данном описании далее определены, по меньшей мере, следующие концепции.
Концепция 1. Устройство, предназначенное для использования совместно с системой для выполнения операции под землей, в котором бурильная колонна продолжается от бурового станка до находящегося под землей инструмента таким образом, что протягивание и отвод бурильной колонны, в общем, приводят к соответствующим движениям находящегося под землей инструмента во время операции под землей, упомянутое устройство, содержащее:
передатчик, выполненный с возможностью его перемещения рядом с находящимся под землей инструментом для определения множества рабочих параметров, относящихся к находящемуся под землей инструменту и для обработки сигнала данных, который характеризует один или больше из рабочих параметров для передачи от находящегося под землей инструмента на основе рабочего статуса находящегося под землей инструмента; и
приемник, для установки в упомянутое выше местоположение над землей для приема сигнала данных и для получения рабочих параметров.
Концепция 2. Устройство по концепции 1, в котором передатчик выполнен с возможностью определения рабочего статуса находящегося под землей инструмента, на основе детектирования, по меньшей мере, одного из движения и вращения находящегося под землей инструмента.
Концепция 3. Устройство по концепции 1 или 2, в котором передатчик и приемник, выполненный с возможностью использования во взаимодействии множества протоколов передачи данных для передачи и приема сигнала данных, соответственно, и передатчик, выполненный с возможностью изменения протокола передачи данных, в соответствии с детектированием изменения рабочего статуса находящегося под землей инструмента.
Концепция 4. Устройство по концепции 3, в котором передатчик выполнен с возможностью детектировать изменение рабочего состояния, по меньшей мере, как (i) изменение неподвижного состояния в динамическое состояние и (ii) изменение динамического состояния в неподвижное состояние.
Концепция 5. Устройство по концепции 3 или 4, в котором множество протоколов передачи данных включает в себя статический протокол разрешения тангажа и динамический протокол разрешения тангажа.
Концепция 6. Устройство по концепции 5, в котором статический протокол разрешения тангажа имеет более высокое разрешение, чем динамический протокол разрешения тангажа.
Концепция 7. Устройство по концепции 5 или 6, в котором, по меньшей мере, один из динамического протокола разрешения тангажа и статического протокола разрешения тангажа содержит: представляют ориентацию тангажа передатчика на основе разрешения, которое уменьшается на один или больше шагов, в ответ на увеличение магнитуды ориентации тангажа.
Концепция 8. Устройство по концепции 7, в котором статический протокол разрешения тангажа характеризует ориентацию тангажа на основе фиксированного количества битов, которое определяет фиксированное количество значений битов, и упомянутые шаги определяют, по меньшей мере, два диапазона тангажа, причем упомянутые значения битов назначают диапазонам тангажа для установления разрешения для каждого диапазона тангажа.
Концепция 9. Устройство по любой из концепций 3-8, в котором передатчик выполнен с возможностью детектировать его стационарное состояние и, в ответ на это, переключаться на фиксированную длину пакета для характеризации одного или больше рабочих параметров и, после этого, повторно передавать пакет фиксированной длины во время стационарного состояния для приема приемником.
Концепция 10. Устройство по концепции 9, в котором передатчик дополнительно выполнен с возможностью включать в себя, по меньшей мере, одну из ориентации крена, ориентации тангажа, состояния батареи и температуры передатчика, в качестве охарактеризованных рабочих параметров в пакете фиксированной длины.
Концепция 11. Устройство по концепции 9 или 10, в котором приемник выполнен с возможностью усреднения по множеству для множества принимаемых значений пакета фиксированной длины для получения охарактеризованных рабочих параметров.
Концепция 12. Устройство по любой из предыдущих концепций, в котором операционные параметры включают в себя ориентацию крена передатчика, и передатчик выполнен с возможностью передавать упомянутый сигнал данных, используя структуру пакета, включающую в себя множество различных типов пакетов, для характеризации множества рабочих параметров, включающих в себя, по меньшей мере, пакет ориентации крена, который устанавливает ориентацию крена, когда детектируется, что находящийся под землей инструмент поворачивается, и для приостановки передачи пакета ориентации крена из структуры пакета, который отвечает за детектирование, что находящийся под землей инструмент не поворачивается.
Концепция 13. Устройство по любой из предыдущих концепций, в котором один из упомянутых рабочих параметров представляет собой ориентацию тангажа находящегося под землей инструмента, и упомянутый передатчик выполнен с возможностью передавать сигнал данных, используя протокол пакета, включающий в себя пакет тангажа с низким разрешением, который отвечает за детектирование динамического состояния находящегося под землей инструмента, и пакет тангажа с высоким разрешением, который отвечает за детектирование статического состояния находящегося под землей инструмента.
Концепция 14. Устройство по любой из предыдущих концепций, в котором упомянутый сигнал данных выполнен на основе протокола пакета для передачи последовательности пакетов из передатчика в приемник, для характеризации одного или больше рабочих параметров таким образом, что каждый пакет включает в себя, по меньшей мере, два бита синхронизации, которые используются при декодировании каждого пакета в приемнике, в то время как биты синхронизации одновременно используются, как биты данных, совместно с другими битами, для характеризации одного или больше рабочих параметров.
Концепция 15. Устройство по концепции 14, в котором рабочий параметр представляет собой ориентацию крена находящегося под землей инструмента.
Концепция 16. Передатчик для использования совместно с приемником, как часть системы для выполнения под землей операции, в которой бурильная колонна продолжается от бурового станка до находящегося под землей инструмента, на котором установлен передатчик, таким образом, что протягивание и отвод бурильной колонны, в общем, приводит к соответствующим движениям находящегося под землей инструмента во время выполнения операции под землей, упомянутый передатчик, содержащий:
по меньшей мере, один датчик, для определения одного или больше рабочих параметров, относящихся к рабочему статусу находящегося под землей инструмента; и
процессор, выполненный с возможностью обработки сигнала данных, для передачи из передатчика на основе рабочего статуса находящегося под землей инструмента.
Концепция 17. Приемник, предназначенный для использования совместно с передатчиком, как часть системы, для выполнения под землей операции, в которой бурильная колонна продолжается от бурового станка до находящегося под землей инструмента, на котором установлен передатчик таким образом, что протягивание и отвод бурильной колонны, в общем, приводит к соответствующим движениям находящегося под землей инструмента во время выполнения операций под землей, упомянутый приемник, содержащий:
компоновку для приема упомянутого сигнала данных, который передает передатчик, и этот сигнал данных характеризует один или больше рабочих параметров, относящихся к рабочему статусу находящегося под землей инструмента таким образом, что сигнал данных обрабатывают на основе рабочего статуса; и
процессор, выполненный с возможностью декодирования обработанного сигнала данных для получения одного или больше рабочих параметров.
Концепция 18. Передатчик, предназначенный для использования совместно с системой для выполнения операции под землей, в которой бурильная колонна продолжается от бурового станка до находящегося под землей инструмента таким образом, что протягивание и/или вращение бурильной колонны приводит к движению находящегося под землей инструмента вдоль подземного пути, в результате чего, находящийся под землей инструмент подвергается механическим ударам и вибрации, упомянутый передатчик, содержащий:
акселерометр, для измерения ориентации тангажа находящегося под землей инструмента в каждом из диапазона высокого разрешения и диапазона низкого разрешения, который подвергается механическому удару и вибрации, для получения последовательности показаний тангажа; и
процессор, который выполнен с возможностью отслеживания последовательности показаний тангажа и, в соответствии с этим, для выбора одного из диапазона высокого разрешения и диапазона низкого разрешения, для характеризации ориентации тангажа и для усреднения последовательности показаний тангажа в выбранном одном из диапазона высокого разрешения и диапазона низкого разрешения, для генерирования среднего показания тангажа, для передачи из передатчика.
Концепция 19. Передатчик по концепции 18, в котором упомянутая средство акселерометра включает в себя акселерометр для высокого значения силы g, с низким разрешением, предназначенный для генерирования последовательности показаний тангажа в диапазоне с высоким разрешением, и акселерометр с высоким разрешением, низким значением силы g, предназначенный для генерирования последовательности показаний тангажа в диапазоне низкого разрешения.
Концепция 20. Передатчик по концепции 18, в котором средство акселерометра включает в себя программируемый акселерометр для обеспечения диапазона с высоким разрешением и диапазона с низким разрешением, в соответствии с командой упомянутого процессора.
Концепция 21. Передатчик по концепции 18 или 19, в котором упомянутый процессор выполнен с возможностью переключения между диапазоном высокого разрешения и диапазоном низкого разрешения на основе порогового значения силы g.
Концепция 22. Передатчик, предназначенный для использования совместно с системой для выполнения операции под землей, в которой бурильная колонна продолжается от бурового станка до находящегося под землей инструмента таким образом, что протягивание и/или вращение бурильной колонны приводит к движению находящегося под землей инструмента вдоль подземного пути, подвергая находящийся под землей инструмент механическому удару и вибрации, упомянутый передатчик, содержащий: акселерометр для определения ориентации тангажа находящегося под землей инструмента, для получения последовательности показаний тангажа; и
процессор, который выполнен с возможностью усреднения последовательности показаний тангажа, для генерирования среднего значения показаний тангажа для передачи из передатчика.
Концепция 23. Передатчик по концепции 22, дополнительно выполненный с возможностью для постоянной фильтрации последовательности показаний тангажа, для уменьшения вариаций среднего значения показаний тангажа, в соответствии с механическим ударом и вибрацией.
Концепция 24. Передатчик по концепции 23, в котором упомянутый процессор выполнен с возможностью отбрасывать изменения тангажа в упомянутой последовательности показаний тангажа, которые обозначают скорость изменения ориентации тангажа, большую, чем заданное значение.
Концепция 25. Передатчик, предназначенный для использования совместно с приемником, как часть системы для выполнения операций под землей, в котором бурильная колонна продолжается от буровой станции до находящегося под землей инструмента, на котором установлен передатчик таким образом, что протягивание и отвод бурильной колонны, в общем, приводит к соответствующим движениям находящегося под землей инструмента во время операции под землей, упомянутый передатчик, содержащий:
по меньшей мере, один датчик для определения одного или больше рабочих параметров, относящихся к находящемуся под землей инструменту; и
процессор, выполненный с возможностью передачи данных, относящихся к одному или больше рабочим параметрам в стандартном режиме и в альтернативном режиме, таким образом, что альтернативный режим характеризует, по меньшей мере, один конкретный один из рабочих параметров, используя количество битов, которое меньше, чем количество битов, которое характеризует конкретный параметр в стандартном режиме, с альтернативным режимом, представляющим определенный параметр с более низким разрешением, чем стандартный режим.
Концепция 26. Передатчик по концепции 25, в котором определенный рабочий параметр представляет собой ориентацию крена находящегося под землей инструмента, и упомянутый передатчик выполнен с возможностью передавать сигнал данных, используя протокол пакета, включающий в себя пакет крена с более высоким разрешением, в упомянутом стандартном режиме и пакет крена с более низким разрешением в альтернативном режиме.
Концепция 27. Передатчик по концепции 26, в котором стандартный режим представляет 24 положения крена, в то время как альтернативный режим представляет 8 положений крена.
Концепция 28. Передатчик по концепции 25, в котором конкретный параметр представляет собой ориентацию тангажа, имеющую магнитуду, и, по меньшей мере, в одном из стандартного режима и альтернативного режима, в ответ на увеличение магнитуды ориентации тангажа, разрешение ориентации тангажа уменьшается за один или больше шагов.
Концепция 29. Передатчик по концепции 25, в котором определенный рабочий параметр представляет собой ориентацию крена передатчиками передатчик выполнен с возможностью передачи упомянутого сигнала данных, используя структуру пакета, включающую в себя множество разных типов пакетов, для характеризации множества рабочих параметров, по меньшей мере, включающих в себя пакет ориентации крена, который устанавливает ориентацию крена в упомянутом стандартном режиме и приостанавливает передачу пакета ориентации крена в альтернативном режиме.
Концепция 30. Передатчик по концепции 25, в котором конкретный рабочий параметр представляет собой ориентацию тангажа находящегося под землей инструмента, и упомянутый передатчик выполнен с возможностью передачи сигнала данных, используя протокол пакета, включающий в себя пакет тангажа с более высоким разрешением в упомянутом стандартном режиме и пакет тангажа с низким разрешением в альтернативном режиме.
Концепция 31. Передатчик по любой из концепций 25-30, дополнительно выполненный с возможностью переключения в упомянутый альтернативный режим на основе детектируемой электромагнитной помехи.
Концепция 32. Передатчик для использования совместно с приемником, как часть системы, для выполнения операции под землей, в котором бурильная колонна продолжается от бурового станка находящегося под землей инструмента, который поддерживает передатчик, таким образом, что протягивание и отвод бурильной колонны, в общем, приводит к соответствующим движениям находящегося под землей инструмента во время операции под землей, упомянутый передатчик, содержащий:
по меньшей мере, один датчик, предназначенный для определения одного или больше рабочих параметров, относящихся к находящемуся под землей инструменту; и
процессор, выполненный с возможностью передачи сигнала данных из передатчика, используя множество протоколов передачи пакетов данных, включающих в себя определенный протокол, который, в ответ на детектирование неподвижного состояния передатчика, использует фиксированный фрейм данных для характеризации одного или больше рабочих параметров и многократно передает фиксированный фрейм данных.
Концепция 33. Передатчик по концепции 32, выполненный с возможностью включать в себя, по меньшей мере, одну из ориентации крена, ориентации тангажа, состояния батареи и температуры передатчика в фиксированном фрейме данных.

Изобретение относится к области направленного бурения и может быть использовано для передачи данных. Техническим результатом является увеличение пропускной способности при передаче данных. В частности, предложено устройство для получения и передачи рабочих параметров находящегося под землей инструмента для совместного использования с системой для выполнения операции под землей, в которой бурильная колонна продолжается от бурового станка до находящегося под землей инструмента таким образом, что протягивание и отвод бурильной колонны приводят к соответствующим движениям находящегося под землей инструмента во время операции под землей. При этом указанное устройство содержит: передатчик, выполненный с возможностью его перемещения рядом с находящимся под землей инструментом для определения множества рабочих параметров, относящихся к находящемуся под землей инструменту, и для детектирования, является ли рабочий статус находящегося под землей инструмента неподвижным или движущимся, а также изменений рабочего статуса, и для передачи данных, характеризующих одни или более рабочих параметров, с более высоким разрешением, когда находящийся под землей инструмент находится в неподвижном состоянии, и с более низким разрешением, когда находящийся под землей инструмент движется; и приемник для установки в местоположение над землей для приема сигнала данных и для получения рабочих параметров. 7 н. и 26 з.п. ф-лы, 6 ил., 3 табл.
1. Устройство для получения и передачи рабочих параметров находящегося под землей инструмента для совместного использования с системой для выполнения операции под землей, в которой бурильная колонна продолжается от бурового станка до находящегося под землей инструмента таким образом, что протягивание и отвод бурильной колонны, в общем, приводят к соответствующим движениям находящегося под землей инструмента во время операции под землей, при этом указанное устройство содержит:
передатчик, выполненный с возможностью его перемещения рядом с находящимся под землей инструментом для определения множества рабочих параметров, относящихся к находящемуся под землей инструменту, и для детектирования, является ли рабочий статус находящегося под землей инструмента неподвижным или движущимся, а также изменений рабочего статуса, и для передачи данных, характеризующих одни или более рабочих параметров, с более высоким разрешением, когда находящийся под землей инструмент находится в неподвижном состоянии, и с более низким разрешением, когда находящийся под землей инструмент движется; и
приемник для установки в местоположение над землей для приема сигнала данных и для получения рабочих параметров.
2. Устройство по п. 1, в котором передатчик выполнен с возможностью определения рабочего статуса находящегося под землей инструмента как движущегося на основе детектирования по меньшей мере одного из движения и вращения находящегося под землей инструмента.
3. Устройство по п. 1, в котором передатчик и приемник выполнены с возможностью использования во взаимодействии множества протоколов передачи данных для передачи и приема сигнала данных соответственно, при этом передатчик выполнен с возможностью изменения протокола передачи данных в соответствии с детектированием изменения рабочего статуса находящегося под землей инструмента.
4. Устройство по п. 3, в котором передатчик выполнен с возможностью детектировать изменение рабочего состояния по меньшей мере как (i) изменение неподвижного состояния на динамическое состояние и (ii) изменение динамического состояния на неподвижное состояние.
5. Устройство по п. 3, в котором множество протоколов передачи данных включает в себя статический протокол разрешения тангажа и динамический протокол разрешения тангажа.
6. Устройство по п. 5, в котором статический протокол разрешения тангажа имеет более высокое разрешение, чем динамический протокол разрешения тангажа.
7. Устройство по п. 5, в котором по меньшей мере один протокол из динамического протокола разрешения тангажа и статического протокола разрешения тангажа содержит представление ориентации тангажа передатчика на основе разрешения, которое уменьшается на один или больше шагов в ответ на увеличение магнитуды ориентации тангажа.
8. Устройство по п. 7, в котором статический протокол разрешения тангажа характеризует ориентацию тангажа на основе фиксированного количества битов, которое определяет фиксированное количество значений битов, при этом упомянутые шаги определяют по меньшей мере два диапазона тангажа, причем упомянутые значения битов назначены диапазонам тангажа для установления разрешения для каждого диапазона тангажа.
9. Устройство по п. 3, в котором передатчик выполнен с возможностью определения его стационарного состояния, и, в ответ на это, переключения на фиксированную длину пакета для характеризации одного или больше рабочих параметров, и, после этого, повторной передачи пакета фиксированной длины во время стационарного состояния для приема приемником.
10. Устройство по п. 9, в котором передатчик дополнительно выполнен с возможностью включать в себя по меньшей мере один параметр из ориентации крена, ориентации тангажа, состояния батареи и температуры передатчика в качестве охарактеризованных рабочих параметров в пакете фиксированной длины.
11. Устройство по п. 9, в котором приемник выполнен с возможностью усреднения по множеству множества принимаемых значений пакета фиксированной длины для получения охарактеризованных рабочих параметров.
12. Устройство по п. 1, в котором рабочие параметры включают в себя ориентацию крена передатчика, причем передатчик выполнен с возможностью передавать упомянутый сигнал данных, используя структуру пакета, включающую в себя множество различных типов пакетов, для характеризации множества рабочих параметров, включающих в себя по меньшей мере пакет ориентации крена, который определяет ориентацию крена при обнаружении, что находящийся под землей инструмент вращается, и приостонавливать передачу пакета ориентации крена из структуры пакета при обнаружении, что находящийся под землей инструмент не вращается.
13. Устройство по п. 1, в котором один из упомянутых рабочих параметров представляет собой ориентацию тангажа находящегося под землей инструмента, причем упомянутый передатчик выполнен с возможностью передавать сигнал данных, используя протокол пакета, включающий в себя пакет тангажа с низким разрешением в ответ на обнаружение динамического состояния находящегося под землей инструмента и пакет тангажа с высоким разрешением в ответ на обнаружение статического состояния находящегося под землей инструмента.
14. Устройство по п. 1, в котором упомянутый сигнал данных выполнен на основе протокола пакета для передачи последовательности пакетов из передатчика в приемник, для характеризации одного или больше рабочих параметров таким образом, что каждый пакет включает в себя по меньшей мере два бита синхронизации, которые используются при декодировании каждого пакета в приемнике, в то время как биты синхронизации одновременно используются как биты данных совместно с другими битами для характеризации одного или больше рабочих параметров.
15. Устройство по п. 14, в котором рабочий параметр представляет собой ориентацию крена находящегося под землей инструмента.
16. Передатчик для использования совместно с приемником, как часть системы для выполнения под землей операции, в которой бурильная колонна продолжается от бурового станка до находящегося под землей инструмента, на котором установлен передатчик, таким образом, что протягивание и отвод бурильной колонны, в общем, приводит к соответствующим движениям находящегося под землей инструмента во время выполнения операции под землей, при этом передатчик содержит:
по меньшей мере один датчик для определения одного или больше рабочих параметров, относящихся к рабочему статусу находящегося под землей инструмента, для получения выходных показаний датчика; и
процессор, выполненный с возможностью детектирования, является ли рабочий статус находящегося под землей инструмента неподвижным или движущимся, а также изменений рабочего статуса на основании выходных показаний датчика и передачи данных, характеризующих одни или более рабочих параметров, с более высоким разрешением, когда находящийся под землей инструмент находится в неподвижном состоянии, и с более низким разрешением, когда находящийся под землей инструмент движется.
17. Приемник для использования совместно с передатчиком, как часть системы для выполнения под землей операции, в которой бурильная колонна продолжается от бурового станка до находящегося под землей инструмента, на котором установлен передатчик, таким образом, что протягивание и отвод бурильной колонны, в общем, приводит к соответствующим движениям находящегося под землей инструмента во время выполнения операций под землей, при этом приемник содержит:
средство приема сигнала данных, передаваемого передатчиком, причем этот сигнал данных характеризует один или больше рабочих параметров, относящихся к рабочему статусу находящегося под землей инструмента, на основании того, является ли передатчик движущимся или неподвижным; и
процессор, выполненный с возможностью декодирования сигнала данных для получения одного или больше рабочих параметров.
18. Передатчик для использования совместно с системой для выполнения операции под землей, в которой бурильная колонна продолжается от бурового станка до находящегося под землей инструмента таким образом, что протягивание и/или вращение бурильной колонны приводит к движению находящегося под землей инструмента вдоль подземного пути, в то время как находящийся под землей инструмент подвергается механическим ударам и вибрации, при этом передатчик содержит:
акселерометр для измерения ориентации тангажа находящегося под землей инструмента в каждом диапазоне из диапазона высокого разрешения и диапазона низкого разрешения, который подвергается механическому удару и вибрации для получения последовательности показаний тангажа; и
процессор, который выполнен с возможностью отслеживания последовательности показаний тангажа и, в соответствии с этим, выбора одного диапазона из диапазона высокого разрешения и диапазона низкого разрешения для характеризации ориентации тангажа и для усреднения последовательности показаний тангажа в выбранном одном диапазоне из диапазона высокого разрешения и диапазона низкого разрешения для генерирования среднего показания тангажа для передачи из передатчика.
19. Передатчик по п. 18, в котором упомянутое средство акселерометра включает в себя акселерометр c низким разрешением и большим значением силы g, предназначенный для генерирования последовательности показаний тангажа в диапазоне с высоким разрешением, и акселерометр с высоким разрешением и малым значением силы g, предназначенный для генерирования последовательности показаний тангажа в диапазоне низкого разрешения.
20. Передатчик по п. 18, в котором средство акселерометра включает в себя программируемый акселерометр для обеспечения диапазона с высоким разрешением и диапазона с низким разрешением в соответствии с командой упомянутого процессора.
21. Передатчик по п. 18, в котором упомянутый процессор выполнен с возможностью переключения между диапазоном высокого разрешения и диапазоном низкого разрешения на основе порогового значения силы g.
22. Передатчик для использования совместно с системой для выполнения операции под землей, в которой бурильная колонна продолжается от бурового станка до находящегося под землей инструмента таким образом, что протягивание и/или вращение бурильной колонны приводит к движению находящегося под землей инструмента вдоль подземного пути, в то время как находящийся под землей инструмент подвергается механическому удару и вибрации, при этом передатчик содержит:
акселерометр для определения ориентации тангажа находящегося под землей инструмента для получения последовательности показаний тангажа; и
процессор, который выполнен с возможностью усреднения последовательности показаний тангажа для генерирования среднего значения показаний тангажа для передачи из передатчика,
при этом передатчик дополнительно выполнен с возможностью постоянной фильтрации последовательности показаний тангажа для уменьшения вариаций среднего значения показаний тангажа в соответствии с механическим ударом и вибрацией.
23. Передатчик по п. 22, в котором упомянутый процессор выполнен с возможностью отбрасывать изменения тангажа в упомянутой последовательности показаний тангажа, которые обозначают скорость изменения ориентации тангажа, большую, чем заданное значение.
24. Передатчик для использования совместно с приемником, как часть системы для выполнения операций под землей, в которой бурильная колонна продолжается от буровой станции до находящегося под землей инструмента, на котором установлен передатчик, таким образом, что протягивание и отвод бурильной колонны, в общем, приводит к соответствующим движениям находящегося под землей инструмента во время операции под землей, при этом передатчик содержит:
по меньшей мере один датчик для определения одного или больше рабочих параметров, относящихся к находящемуся под землей инструменту; и
процессор, выполненный с возможностью передачи данных, относящихся к одному или больше рабочим параметрам, в стандартном режиме и в альтернативном режиме, таким образом, что альтернативный режим характеризует по меньшей мере один конкретный параметр из рабочих параметров, используя количество битов, которое меньше, чем количество битов, которое характеризует конкретный параметр в стандартном режиме, при этом альтернативный режим представляет определенный параметр с более низким разрешением, чем стандартный режим.
25. Передатчик по п. 24, в котором конкретный рабочий параметр представляет собой ориентацию крена находящегося под землей инструмента, причем упомянутый передатчик выполнен с возможностью передавать сигнал данных, используя протокол пакета, включающий в себя пакет крена с более высоким разрешением в упомянутом стандартном режиме и пакет крена с более низким разрешением в альтернативном режиме.
26. Передатчик по п. 25, в котором стандартный режим представляет 24 положения крена, в то время как альтернативный режим представляет 8 положений крена.
27. Передатчик по п. 24, в котором конкретный параметр представляет собой ориентацию тангажа, имеющую магнитуду, причем в по меньшей мере одном режиме из стандартного режима и альтернативного режима, в ответ на увеличение магнитуды ориентации тангажа, разрешение ориентации тангажа уменьшается на один или больше шагов.
28. Передатчик по п. 24, в котором конкретный рабочий параметр представляет собой ориентацию крена передатчика, причем передатчик выполнен с возможностью передачи упомянутого сигнала данных, используя структуру пакета, включающую в себя множество разных типов пакетов для характеризации множества рабочих параметров, по меньшей мере включающих в себя пакет ориентации крена, который устанавливает ориентацию крена в упомянутом стандартном режиме, и приостановки передачи пакета ориентации крена в альтернативном режиме.
29. Передатчик по п. 24, в котором конкретный рабочий параметр представляет собой ориентацию тангажа находящегося под землей инструмента, причем упомянутый передатчик выполнен с возможностью передачи сигнала данных, используя протокол пакета, включающий в себя пакет тангажа с более высоким разрешением в упомянутом стандартном режиме и пакет тангажа с более низким разрешением в альтернативном режиме.
30. Передатчик по п. 24, дополнительно выполненный с возможностью переключения в упомянутый альтернативный режим на основе детектируемой электромагнитной помехи.
31. Передатчик для использования совместно с приемником, как часть системы для выполнения операции под землей, в которой бурильная колонна продолжается от бурового станка до находящегося под землей инструмента, который поддерживает передатчик, таким образом, что протягивание и отвод бурильной колонны, в общем, приводит к соответствующим движениям находящегося под землей инструмента во время операции под землей, при этом передатчик содержит:
по меньшей мере один датчик, предназначенный для определения одного или больше рабочих параметров, относящихся к находящемуся под землей инструменту; и
процессор, выполненный с возможностью передачи сигнала данных из передатчика, используя множество протоколов передачи пакетов данных, включающих в себя определенный протокол, который, в ответ на детектирование неподвижного состояния передатчика, выполнен с возможностью использования фиксированного фрейма данных для характеризации одного или больше рабочих параметров и повторной передачи фиксированного фрейма данных.
32. Передатчик по п. 31, выполненный с возможностью включать в себя по меньшей мере один параметр из ориентации крена, ориентации тангажа, состояния батареи и температуры передатчика в фиксированном фрейме данных.
33. Устройство по п. 1, в котором передатчик дополнительно выполнен с возможностью передачи данных, относящихся к одному или больше рабочим параметрам, в стандартном режиме с более высоким разрешением и в альтернативном режиме с более низким разрешением, таким образом, что альтернативный режим характеризует по меньшей мере один конкретный параметр из рабочих параметров, используя количество битов, которое меньше, чем количество битов, которое характеризует конкретный параметр в стандартном режиме.
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| EA 200500372 A1, 25.08.2005 | |||
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| RU 22376 U1, 27.03.2002 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПРОБОЙНИКА В ГРУНТЕ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2235830C1 |

