Область техники
[0001] Данное изобретение касается устройства вывода изображений на дисплей, предназначенного для соединения изображений, полученных с нескольких камер, установленных на транспортном средстве, и вывода на дисплей синтезированного изображения.
Уровень техники
[0002] В Патентном документе 1 и Патентном документе 2 описан один пример устройства вывода изображений на дисплей. В частности, в Патентном документе 1 описано устройство вывода изображений на дисплей, предназначенное для создания синтезируемого изображения посредством соединения заднего бокового изображения (заднее и боковое изображение), полученного камерой, сконфигурированной для формирования изображений заднего бокового сектора целевого транспортного средства (сектора сзади и сбоку от транспортного средства), и заднего изображения, которое получено камерой, сконфигурированной для формирования изображений заднего сектора целевого транспортного средства без искажений сзади целевого транспортного средства таким образом, чтобы синтезируемое изображение являлось изображением, полученным посредством осмотра задней окружающей обстановки целевого транспортного средства с виртуальной точки зрения, и вывода полученного синтезированного изображения на дисплей на внутреннем зеркале транспортного средства. В Патентном документе 2 описано устройство вывода изображений на дисплей, предназначенное для обрезки заднего правого изображения, полученного камерой, настроенной на формирование изображений заднего правого сектора целевого транспортного средства, и заднего левого изображения, полученного камерой, сконфигурированной для формирования изображений заднего левого сектора целевого транспортного средства на основе расстояния между целевым транспортным средством и задним транспортным средством, которое движется сзади целевого транспортного средства, для создания синтезированного изображения путем соединения обрезанного заднего левого изображения и обрезанного заднего правого изображения таким образом, чтобы заднее транспортное средство не дублировалось в синтезированном изображении, и чтобы вывести на дисплей полученное синтезированное изображение.
Список цитируемых материалов
Патентный документ
[0003]
Патентный документ 1. Японская нерассмотренная патентная заявка, публикация №2008-230558
Патентный документ 2. Японская нерассмотренная патентная заявка, публикация №2006-338566
Сущность изобретения
Техническая задача
[0004] Устройство вывода изображений на дисплей, раскрытое в Патентном документе 1, соединяет заднее боковое изображение и заднее изображение, не учитывая наличие заднего транспортного средства, которое движется сзади целевого транспортного средства. Поэтому у устройства вывода изображений на дисплей, раскрытого в Патентном документе 1, имеется техническая проблема, состоящая в том, что существует возможность, что устройство вывода изображений на дисплей не сможет соединить заднее боковое изображение и заднее изображение для создания синтезированного изображения, для которого обзор заднего транспортного средства обеспечен соответствующим образом, при наличии заднего транспортного средства.
[0005] С другой стороны, устройство вывода изображений на дисплей, раскрытое в Патентном документе 2, корректирует обрезанную часть как заднего правого изображения, так и заднего левого изображения таким образом, чтобы изображение заднего транспортного средства не дублировалось, когда устройство вывода изображений на дисплей создает синтезированное изображение. Однако видимость заднего транспортного средства не обязательно оказывается обеспеченной на синтезированном изображении посредством только корректировки обрезанной части для исключения дублирования изображения заднего транспортного средства. Таким образом, у устройства вывода изображений на дисплей, раскрытого в Патентном документе 2, также существует техническая проблема, состоящая в том, что существует возможность того, что устройство вывода изображений на дисплей не сможет соединить заднее правое изображение и заднее левое изображение для создания синтезированного изображения, на котором видимость заднего транспортного средства обеспечена соответствующим образом, при наличии заднего транспортного средства.
[0006] Вышеописанная техническая проблема является одним из примеров технических проблем, которые может решить настоящее изобретение. Поэтому задача данного изобретения состоит в том, чтобы предоставить, например, устройство вывода изображений на дисплей, предназначенное для создания синтезированного изображения путем соединения множества изображений, которые получены множеством устройств формирования изображения, размещенных на первом транспортном средстве, соответственно, и предназначенное для создания синтезированного изображения, на котором видимость второго транспортного средства обеспечена надлежащим образом при наличии второго транспортного средства сзади первого транспортного средства.
Решение задачи
[0007] Один аспект устройства вывода изображений на дисплей в соответствии с настоящим изобретением содержит назначающее устройство, сконфигурированное для назначения в местоположении, находящемся снаружи сзади первого транспортного средства, виртуальной плоскости синтезирования, перпендикулярной продольной оси первого транспортного средства; соединяющее устройство, сконфигурированное для соединения заднего изображения и заднего бокового изображения для создания синтезированного изображения, на котором окружение, отображаемое на заднем изображении, и окружение, отображаемое на заднем боковом изображении, надлежащим образом соединены без искажений в местоположении плоскости синтезирования; при этом заднее изображение получено задним устройством формирования изображения, сконфигурированным для создания изображения заднего сектора пространства, расположенного сзади первого транспортного средства, а заднее боковое изображение получено задним боковым устройством формирования изображения, сконфигурированным для создания изображения заднего бокового сектора пространства, расположенного сзади и сбоку от первого транспортного средства; а также устройство отображения, сконфигурированное для отображения синтезированного изображения; при этом назначающее устройство сконфигурировано, чтобы в случае, когда устройство обнаружения определяет наличие второго транспортного средства сзади первого транспортного средства, назначать плоскость синтезирования в местоположении, отличном от местоположения плоскости синтезирования в случае, когда устройство обнаружения не определяет наличие второго транспортного средства сзади первого транспортного средства.
Краткое описание чертежей
[0008]
ФИГ. 1 является схемой, на которой показана структура транспортного средства в представленном примере осуществления изобретения.
ФИГ. 2 представляет собой вид сверху мест расположения камеры заднего вида, камеры заднего левого вида и камеры заднего правого вида соответственно, а также диапазоны изображений каждой камеры заднего вида, камеры заднего левого вида и камеры заднего правого вида в транспортном средстве в представленном примере осуществления изобретения. ФИГ. 3А и ФИГ. 3В представляют собой вид сверху на плоскость синтезирования сзади транспортного средства.
ФИГ. 4А представляет собой вид сверху, схематично иллюстрирующий процесс соединения изображений для создания синтезированного изображения; ФИГ. 4В представляет собой вид сверху, иллюстрирующий диапазоны изображений, используемые процессом соединения изображений.
ФИГ. 5 представляет собой вид сверху, иллюстрирующий синтезированное изображение, полученное в процессе соединения изображений в представленном примере осуществления изобретения.
ФИГ. 6А представляет собой вид сверху, на котором видно, что слепая зона не входит в синтезированное изображение, что обусловлено процессом соединения изображений; ФИГ. 6В представляет собой вид сверху, на котором показано заднее транспортное средство, которое не расположено в слепой зоне; ФИГ. 6С представляет собой вид сверху, на котором показано заднее транспортное средство, расположенное в слепой зоне. ФИГ. 7 представляет собой блок-схему, на которой показан алгоритм назначения местоположения плоскости синтезирования. ФИГ. 8А представляет собой вид сверху, на котором показано местоположение плоскости синтезирования и взаимное расположение заднего транспортного средства и слепой зоны, создаваемой, когда расстояние между транспортным средством и задним транспортным средством оказывается больше первого порогового значения; ФИГ. 8В представляет собой плоский вид, на котором показано синтезированное изображение, полученное в ситуации, проиллюстрированной на ФИГ. 8А.
ФИГ. 9А представляет собой вид сверху, на котором показано местоположение плоскости синтезирования и взаимное расположение заднего транспортного средства и слепой зоны, создаваемой, когда расстояние между транспортным средством и задним транспортным средством оказывается меньше первого пороговое значения; ФИГ. 9В представляет собой плоский вид, на котором показано синтезированное изображение, полученное в ситуации, проиллюстрированной на ФИГ. 9А.
ФИГ. 10 представляет собой блок-схему, на которой показана схема модифицированного примера алгоритма назначения местоположения плоскости синтезирования.
ФИГ. 11 представляет собой вид сверху, на котором показано заднее транспортное средство, расположенное в слепой зоне камеры.
ФИГ. 12 представляет собой вид сверху, на котором показан пример, где заднее изображение, заднее левое изображение и заднее правое изображение отображаются на дисплее по отдельности, без их соединения.
ФИГ. 13 представляет собой вид сверху, на котором показан пример, где выделены заднее левое изображение или заднее правое изображение.
Описание примеров осуществления изобретения
[0009] Далее, со ссылкой на чертежи, раскрыт один пример осуществления устройства вывода изображений на дисплей согласно данному изобретению. Далее раскрыто транспортное средство 1, для которого применяется один пример устройства вывода изображений на дисплей согласно данному изобретению.
[0010] 1. Конструкция транспортного средства 1
Во-первых, со ссылкой на ФИГ. 1 и ФИГ. 2 будет описана конструкция транспортного средства 1 в настоящем примере осуществления изобретения. ФИГ. 1 является схемой, на которой показана структура транспортного средства 1 в настоящем примере осуществления изобретения. ФИГ. 2 представляет собой вид сверху мест расположения камеры 11В заднего вида, камеры 11BL заднего левого вида и камеры 11BR заднего правого вида соответственно, а также диапазон изображений каждой камеры из камеры 11В заднего вида, камеры 11BL заднего левого вида и камеры 11BR заднего правого вида в транспортном средстве 1 в настоящем примере осуществления изобретения. Обратите внимание, что «правая», «левая» и «задняя» сторона означают «правую», «левую» и «заднюю» сторону по отношению к направлению перемещения транспортного средства 1 соответственно в нижеприведенном описании, если не указано иначе. Кроме того, в нижеприведенном описании пример осуществления изобретения раскрыт с использованием системы координат XYZ, в которой правое направление соответствует "направлению +Y", левое направление соответствует "направлению -Y", направление назад соответствует "направлению -X", направление вперед соответствует "направлению +Х", направление вверх соответствует "направлению +Z", а направление вниз соответствует "направлению -Z".
[0011] Как показано на ФИГ. 1, транспортное средство 1 оснащено следующим оборудованием: камера 11В заднего вида, которая является одним примером "заднего устройства формирования изображения" или "заднего формирователя изображения" в нижеописанном дополнительном утверждении; камера 11BL заднего левого вида, которая является одним примером "заднего бокового устройства формирования изображения" или "заднего бокового формирователя изображения" в нижеописанном дополнительном утверждении; камера 11BR заднего правого вида, которая является одним примером "заднего бокового устройства формирования изображения" или "заднего бокового формирователя изображения" в нижеописанном дополнительном утверждении; датчик 12 заднего транспортного средства; 13 (электронный блок управления), который является одним примером "контроллера" в нижеописанном дополнительном утверждении; и дисплей 14, который является одним примером "устройства отображения" или "дисплея" в нижеописанном дополнительном утверждении.
[0012] Камера 11В заднего вида является устройством формирования изображения, сконфигурированным для изображения (другими словами, захвата изображения) заднего сектора, расположенного сзади (непосредственно сзади) транспортного средства 1 (а именно, расположенном в обращенном назад положении, если смотреть со стороны транспортного средства 1), как показано на ФИГ. 2. Задний сектор соответствует пространству, включающему в себя, по крайней мере, одну часть пространства, которое отражается в зеркале заднего вида, в предположении, что зеркало заднего вида установлено в салоне (иными словами, кабине) транспортного средства 1. А именно, камера 11В заднего вида используется в качестве замены зеркала заднего вида, установленного в салоне транспортного средства 1, и составляет одну часть того, что называется электронным зеркалом в настоящем примере осуществления изобретения. Центр изображения камеры 11В заднего вида находится непосредственно сзади транспортного средства 1 для того, чтобы изобразить сектор позади транспортного средства 1. А именно, оптическая ось такой оптической системы, как линза камеры 11 В заднего вида, направлена назад и прямо относительно транспортного средства 1. В результате диапазон изображения (иными словами, угол поля изображения) IRB, которое формируется камерой 11 В заднего вида, настроен на обзор заднего сектора.
[0013] Камера 11BL заднего левого вида является устройством формирования изображения, сконфигурированным для изображения заднего левого сектора, расположенного сзади от транспортного средства 1 и слева от транспортного средства 1 (а именно, сзади и слева, если смотреть со стороны транспортного средства 1), как показано на ФИГ. 2. Задний левый сектор соответствует пространству, включающему в себя, по крайней мере, одну часть пространства, которая отражается в дверном зеркале, установленном на левой дверце, когда левая дверца находится в закрытом положении (иными словами, левая дверца закрыта), в предположении, что дверное зеркало установлено на левой дверце транспортного средства 1 слева от транспортного средства 1. А именно, камера 11BL заднего левого вида используется в качестве замены дверного зеркала, установленного на левой дверце транспортного средства 1, и составляет одну часть того, что называется электронным зеркалом в настоящем примере осуществления изобретения. Центр изображения камеры 11BL заднего левого вида находится слева от транспортного средства 1 и сзади транспортного средства 1 для того, чтобы изобразить сектор сзади слева от транспортного средства 1. Иными словами, центр изображения камеры 11BL заднего левого вида находится слева от центра изображения камеры 11В заднего вида. А именно, оптическая ось такой оптической системы, как линза камеры 11BL заднего левого вида, направлена назад и влево от вышеописанной оптической оси оптической системы камеры 11В заднего вида. В результате диапазон изображения (иными словами, угол поля изображения) IRBL, которое формируется камерой 11BL заднего левого вида, настроен на обзор заднего левого сектора. Обратите внимание, что диапазон IRBL изображения может частично перекрываться с диапазоном IRB изображения.
[0014] Камера 11BR заднего правого вида является устройством формирования изображения, сконфигурированным для изображения заднего правого сектора, расположенного сзади от транспортного средства 1 и справа от транспортного средства 1 (а именно, сзади и справа, если смотреть со стороны транспортного средства 1), как показано на ФИГ. 2. Задний правый сектор соответствует пространству, включающему в себя, по крайней мере, одну часть пространства, которая отражается в дверном зеркале, установленном на правой дверце, когда правая дверца находится в закрытом положении (иными словами, правая дверца закрыта), в предположении, что дверное зеркало установлено на правой дверце транспортного средства 1 справа от транспортного средства 1. А именно, камера 11BR заднего правого вида используется в качестве замены дверного зеркала, установленного на правой дверце транспортного средства 1, и составляет одну часть того, что называется электронным зеркалом в настоящем примере осуществления изобретения. Центр изображения камеры 11BR заднего правого вида находится справа от транспортного средства 1 и сзади транспортного средства 1 для того, чтобы изобразить сектор сзади справа от транспортного средства 1. Иными словами, центр изображения камеры 11BR заднего правого вида находится справа от центра изображения камеры 11В заднего вида. А именно, оптическая ось такой оптической системы, как линза камеры 11BR заднего правого вида, направлена назад влево от вышеописанной оптической оси оптической системы камеры 11В заднего вида. В результате диапазон изображения (иными словами, угол поля изображения) IRBR, которое формируется камерой 11BR заднего правого вида, настроен на обзор заднего правого сектора. Обратите внимание, что диапазон IRBR изображения может частично перекрываться с диапазоном IRB изображения.
[0015] Датчик 12 заднего транспортного средства является устройством обнаружения, предназначенным для обнаружения другого транспортного средства 2, которое расположено сзади транспортного средства 1 (здесь "сзади транспортного средства 1" включает в себя не только "непосредственно сзади транспортного средства 1", но также и "сзади и слева от транспортного средства 1" и "сзади и справа от транспортного средства 1"). Далее другое транспортное средство 2 упоминается как "заднее транспортное средство 2". Датчик 12 заднего транспортного средства включает в себя, по крайней мере, одно из следующих устройств: радар, лазерный радар (Light Detection and Ranging - LIDAR) или камеру. Обратите внимание, что, по крайней мере, одно из следующих устройств: камера 11В заднего вида, камера 11BL заднего левого вида и камера 11BR заднего правого вида, можно использовать в качестве датчика 12 заднего транспортного средства.
[0016] ЭБУ 13 сконфигурирован для управления всей эксплуатацией транспортного средства 1. В примере осуществления настоящего изобретения ЭБУ 13 дополнительно сконфигурирован для отображения на дисплее 14 заднего изображения 111В, заднего левого изображения 111BL и заднего правого изображения 111BR. Заднее изображение 111В является изображением, которое получено камерой 11В заднего вида (а именно, изображением, показывающим окружение в заднем секторе). Заднее левое изображение 111BL является изображением, которое получено камерой 11BL заднего левого вида (а именно, изображением, показывающим окружение в заднем левом секторе). Заднее правое изображение 111BR является изображением, которое получено камерой 11BR заднего правого вида (а именно, изображением, показывающим окружение в заднем правом секторе). Для выполнения отображения на дисплее ЭБУ 13 содержит в качестве обрабатывающих блоков, которые логически реализованы в ЭБУ 13, модуль 131 сбора изображений, блок 132 назначения плоскости синтезирования, что является одним примером "назначающего устройства" в нижеописанном дополнительном утверждении, и модуль 133 синтезирования изображения, который является одним примером "соединяющего устройства" в нижеописанном дополнительном утверждении.
[0017] Модуль 131 сбора изображений предназначен для сбора заднего изображения 111В, заднего левого изображения 111BL и заднего правого изображения 111BR с камеры 11В заднего вида, камеры 11BL заднего левого вида и камеры 11BR заднего правого вида, соответственно.
[0018] Блок 132 назначения плоскости синтезирования сконфигурирован для назначения местоположения плоскости CS синтезирования, которое является параметром, используемым для надлежащего синтезирования без искажений (а именно, соединения) заднего изображения 111В, заднего левого изображения 111BL и заднего правого изображения 111BR. Плоскость CS синтезирования является мнимой плоскостью, задаваемой в местоположении, которое находится позади транспортного средства 1 на заранее заданном расстоянии L, как показано на ФИГ. 3А и ФИГ. 3В. Плоскость CS синтезирования является плоскостью, перпендикулярной продольной оси (например, ось крена и ось X в примере, показанном на ФИГ. 3А и ФИГ. 3В) транспортного средства 1. В примере, показанном на ФИГ. 3А и ФИГ. 3В, плоскость CS синтезирования является плоскостью, перпендикулярной продольной оси транспортного средства 1. А именно, в примере, показанном на ФИГ. 3А и ФИГ. 3В, плоскость CS синтезирования является плоскостью, которая располагается вертикально.
[0019] Модуль 133 синтезирования изображения предназначен для создания синтезированного изображения 111С посредством выполнения процесса соединения изображений для соединения заднего изображения 111В, заднего левого изображения 111BL и заднего правого изображения 111BR. В частности, модуль 133 синтезирования изображения выполняет процесс соединения изображений таким образом, чтобы заднее изображение 111В, заднее левое изображение 111BL и заднее правое изображение 111BR соединялись без искажений на плоскости CS синтезирования, задаваемой блоком 132 назначения плоскости синтезирования. А именно, модуль 133 синтезирования изображения выполняет процесс соединения изображений таким образом, чтобы окружение на плоскости CS синтезирования (а именно, окружение в местоположении, где назначена плоскость CS синтезирования) на заднем изображении 111В, окружение на плоскости CS синтезирования на заднем левом изображении 111BL и окружение на плоскости CS синтезирования на заднем правом изображении 111BR соединялись без искажений.
[0020] В этом случае модуль 133 синтезирования изображения сконфигурирован для преобразования заднего изображения 111В в заднее изображение 112В, которое соответствует изображению, полученному камерой 11В заднего вида, когда камера 11В заднего вида отображает диапазон IRB' изображения, который является, по крайней мере, одной частью диапазона IRB изображения, как показано на ФИГ. 4А. Более того, модуль 133 синтезирования изображения сконфигурирован для преобразования заднего левого изображения 111BL в заднее левое изображение 112BL, которое соответствует изображению, полученному камерой 11BL заднего левого вида, когда камера 11BL заднего левого вида отображает диапазон IRBL' изображения, который является, по крайней мере, одной частью диапазона IRBL изображения, как показано на ФИГ. 4А. Кроме того, модуль 133 синтезирования изображения предназначен для преобразования заднего правого изображения 111BR в заднее правое изображение 112BR, которое соответствует изображению, полученному камерой 11BR заднего правого вида, когда камера 11BR заднего правого вида отображает диапазон IRBR' изображения, который является, по крайней мере, одной частью диапазона IRBR изображения, как показано на ФИГ. 4А. Диапазон IRB' изображения, диапазон IRBL' изображения и диапазон IRBR' изображения установлены, чтобы удовлетворять следующим условиям: (i) левый край (иными словами, левая сторона) зоны SB перекрытия расположен близко к правому краю зоны SBL перекрытия, и (ii) правый край зоны SB перекрытия расположен близко к левому краю зоны SBL перекрытия, как показано на ФИГ. 4В. Зона SB перекрытия является пространством, в котором диапазон IRB' изображения накладывается на плоскость CS синтезирования (иными словами, диапазон IRB' изображения пересекается с плоскостью CS синтезирования). Зона SBL перекрытия является пространством, в котором диапазон IRBL' изображения накладывается на плоскость CS синтезирования (иными словами, диапазон IRBL' изображения пересекается с плоскостью CS синтезирования). Зона SBR перекрытия является пространством, в котором диапазон IRBR' изображения накладывается на плоскость CS синтезирования (иными словами, диапазон IRBR' изображения пересекается с плоскостью CS синтезирования). Таким образом, процесс синтезирования изображения, выполняемый модулем 133 синтезирования изображения, включает в себя процесс преобразования изображения для преобразования заднего изображения 111В, заднего левого изображения 111BL и заднего правого изображения 111BR в заднее изображение 112В, заднее левое изображение 112BL и заднее правое изображение 112BR, соответственно. Процесс преобразования изображения может включать в себя процесс извлечения изображения для извлечения из заднего изображения 111В части изображения, которая является одним фрагментом заднего изображения 111В (а именно, процесс обрезки ненужной части заднего изображения 111В). Процесс преобразования изображения может включать в себя процесс извлечения изображения для извлечения из заднего левого изображения 111BL части изображения, которая является одним фрагментом заднего левого изображения 111BL (а именно, процесс обрезки ненужной части заднего левого изображения 111BL). Процесс преобразования изображения может включать в себя процесс извлечения изображения для извлечения из заднего правого изображения 111BR части изображения, которая является одним фрагментом заднего правого изображения 111BR (а именно, процесс обрезки ненужной части заднего правого изображения 111BR). Процесс преобразования изображения может включать в себя процесс преобразования точки наблюдения для преобразования точки наблюдения (другими словами, точки фотографирования), по крайней мере, одного из следующих изображений: заднего изображения 111В, заднего левого изображения 111BL и заднего правого изображения 111BR (в качестве альтернативы, части изображения, полученной при извлечении изображения). Процесс преобразования изображения может включать в себя процесс масштабирования для масштабирования (иными словами, расширения и/или уменьшения), по крайней мере, одного из следующих изображений: заднего изображения 111В, заднего левого изображения 111BL и заднего правого изображения 111BR (в качестве альтернативы, части изображения, полученной при извлечении изображения).
[0021] Затем модуль 133 синтезирования изображения создает синтезированное изображение 111С, на котором задняя левая зона расположена слева от задней зоны, а задняя правая часть пространства расположена справа от задней зоны. А именно, модуль 133 синтезирования изображения создает синтезированное изображение 111С, на котором заднее левое изображение 112BL расположено слева от заднего изображения 112В, а заднее правое изображение 112BR расположено справа от заднего изображения 112В, как показано на ФИГ. 5. Таким образом, процесс синтезирования изображения, выполняемый модулем 133 синтезирования изображения, включает в себя процесс объединения заднего изображения 112В, заднего левого изображения 112BL и заднего правого изображения 112BR.
[0022] Кроме того, модуль 133 синтезирования изображения сконфигурирован для управления дисплеем 14 для отображения полученного синтезированного изображения 111С. Обратите внимание, что дисплей 14 размещается в салоне транспортного средства 1 и предназначен для отображения синтезированного изображения 111С пассажиру или водителю транспортного средства 1 в салоне транспортного средства.
[0023] 2. Техническая проблема, возникающая при создании синтезированного изображения 111С
Далее, со ссылкой на ФИГ. 6А и ФИГ. 6В, раскрыта техническая проблема, которая может возникнуть при создании синтезированного изображения 111С в ходе вышеупомянутого процесса синтезирования изображения.
[0024] Как раскрыто выше, процесс синтезирования изображения включает в себя (i) процесс преобразования изображения для преобразования заднего изображения 111В, полученного при отображении диапазона IRB изображения в заднее изображение 112В, полученное при отображении диапазона IRB' изображения, (ii) процесс преобразования изображения для преобразования заднего левого изображения 111BL, полученного при отображении диапазона IRBL изображения в заднее левое изображение 112BL, полученное при отображении диапазона IRBL' изображения, и (iii) процесс преобразования изображения для преобразования заднего правого изображения 111BR, полученного при отображении диапазона IRBR изображения в заднее правое изображение 112BR, полученное при отображении диапазона IRBR' изображения. В этом случае, как показано на ФИГ. 6А, может иметься слепая зона DSI, не входящая в заднее изображение 112В, заднее левое изображение 112BL и заднее правое изображение 112BR, в зависимости от отношения между диапазоном IRB изображения, диапазоном IRBL изображения, диапазоном IRBR изображения, диапазоном IRB' изображения, диапазоном IRBL' изображения и диапазоном IRBR' изображения.
[0025] Слепая зона DSI обычно имеется между транспортным средством 1 и плоскостью CS синтезирования, как показано на ФИГ. 6А. Поэтому, даже если имеется слепая зона DSI, заднее транспортное средство 2 не находится в слепой зоне DSI, когда заднее транспортное средство 2 не находится впереди плоскости CS синтезирования, как показано на ФИГ. 6В. Таким образом, техническая проблема, состоящая в том, что, по крайней мере, одна часть заднего транспортного средства 2 противоестественно отсутствует в синтезированном изображении 111С, не возникает. А именно, модуль 133 синтезирования изображения может создавать синтезированное изображение 111С, которое включает в себя заднее транспортное средство 2, без возникновения ощущения странности (а именно, оно полностью включает в себя заднее транспортное средство 2, которое не отсутствует неестественным образом).
[0026] С другой стороны, как показано на ФИГ. 6С, если заднее транспортное средство 2 находится впереди плоскости CS синтезирования, когда имеется слепая зона DSI, то существует возможность, что, по крайней мере, одна часть заднего транспортного средства 2 будет расположена в слепой зоне DSI. В этом случае существует возможность, что, по крайней мере, одна часть заднего транспортного средства 2 (в частности, по крайней мере, одна часть заднего транспортного средства 2, расположенная в слепой зоне DSI) отсутствует в синтезированном изображении 111С. А именно, возникает техническая проблема, состоящая в том, что модуль 133 синтезирования изображения не может создать синтезированное изображение 111С, которое включает в себя заднее транспортное средство 2, без возникновения щущения странности.
[0027] Одна из причин, почему возникает эта техническая проблема, состоит в том, что местоположение плоскости CS синтезирования (в частности, местоположение относительно транспортного средства 1) зафиксировано (т.е., его невозможно изменить). Таким образом, настоящий пример осуществления изобретения решает эту техническую проблему путем использования блока 132 назначения плоскости синтезирования, предназначенного для назначения плоскости CS синтезирования с изменяющимся местоположением (а именно, предназначенным для изменения местоположения плоскости CS синтезирования). Ниже подробно раскрыта процедура назначения плоскости CS синтезирования.
[00281 3. Блок-схема процедуры назначения плоскости синтезирования
Далее со ссылкой на ФИГ. 7 раскрыт алгоритм назначения местоположения плоскости CS синтезирования. ФИГ. 7 представляет собой блок-схему, на которой показана последовательность действий при назначении плоскости синтезирования.
[0029] Как показано на ФИГ. 7, блок 132 назначения плоскости синтезирования определяет на основе обнаруженного результата датчика 12 заднего транспортного средства, присутствует ли заднее транспортное средство 2 (этап S11). А именно, блок 132 назначения плоскости синтезирования определяет, обнаружено ли заднее транспортное средство 2 датчиком 12 заднего транспортного средства.
[0030] Если в результате определения на этапе S11 было определено, что заднее транспортное средство 2 отсутствует (а именно, заднее транспортное средство 2 не обнаружено датчиком 12 заднего транспортного средства) (этап S11: нет), блок 132 назначения плоскости синтезирования задает плоскость CS синтезирования в исходном местоположении (иными словами, начальном или обычном местоположении) (этап S14). Местоположение по умолчанию задается заранее относительно транспортного средства 1. Местоположение по умолчанию является местом, которое находится позади транспортного средства 1 на заранее заданном первом расстоянии L1 (например, двенадцать метров).
[0031] С другой стороны, если в результате определения на этапе S11 было определено, что заднее транспортное средство 2 присутствует (а именно, заднее транспортное средство 2 обнаружено датчиком 12 заднего транспортного средства) (этап S11: да), блок 132 назначения плоскости синтезирования определяет на основе результата обнаружения датчика 2 заднего транспортного средства, меньше ли расстояние между транспортным средством 1 и задним транспортным средством 2, чем заранее заданное первое пороговое значение ТН1 (этап S12). Далее в настоящем документе расстояние между транспортным средством 1 и задним транспортным средством 2 называется "расстоянием L12 между транспортными средствами".
[0032] Первому пороговому значению ТН1 назначается соответствующее значение, при котором ситуация, когда модуль 133 синтезирования изображения может создать синтезированное изображение 111С, которое включает в себя заднее транспортное средство 2, без возникновения ощущения странности, даже когда плоскость CS синтезирования установлена в местоположении по умолчанию, может отличаться от ситуации, когда модуль 133 синтезирования изображения не может создать синтезированное изображение 111С, которое включает в себя заднее транспортное средство 2, без возникновения ощущения странности, если плоскость CS синтезирования установлена в местоположении по умолчанию на основе расстояния L12 между транспортными средствами. При рассмотрении вышеописанной технической проблемы, когда расстояние L12 между транспортными средствами становится короче, существует более высокая вероятность того, что модуль 133 синтезирования изображения не сможет создать синтезированное изображение 111С, которое включает в себя заднее транспортное средство 2, без возникновения ощущения странности, если плоскость CS синтезирования установлена в местоположении по умолчанию. Таким образом, ситуация, когда расстояние L12 между транспортными средствами меньше, чем первое пороговое значение ТН1, соответствует ситуации, когда модуль 133 синтезирования изображения не может создать синтезированное изображение 111С, которое включает в себя заднее транспортное средство 2, без возникновения ощущения странности, если плоскость CS синтезирования установлена в местоположении по умолчанию. С другой стороны, ситуация, когда расстояние L12 между транспортными средствами больше, чем первое пороговое значение ТН1, соответствует ситуации, когда модуль 133 синтезирования изображения может создать синтезированное изображение 111С, которое включает в себя заднее транспортное средство 2, без возникновения ощущения странности, даже если плоскость CS синтезирования установлена в местоположении по умолчанию. Расстояние между транспортным средством 1 и местоположением по умолчанию плоскости CS синтезирования (а именно, вышеупомянутое первое расстояние L1) или расстояние, которое больше, чем первое расстояние L1, является примером первого порогового значения ТН1, которое удовлетворяет вышеупомянутому требованию.
[0033] Если в результате определения на этапе S12 было определено, что расстояние L12 между транспортными средствами больше, чем первое пороговое значение ТН1 (этап S12: нет), модуль 133 синтезирования изображения сможет создать синтезированное изображение 111С, которое включает в себя заднее транспортное средство 2, без возникновения ощущения странности, даже когда плоскость CS синтезирования установлена в местоположении по умолчанию. Таким образом, в этом случае, если блок 132 назначения плоскости синтезирования устанавливает плоскость CS синтезирования в местоположении по умолчанию (этап S14).
[0034] С другой стороны, если в результате определения на этапе S12 было определено, что расстояние L12 между транспортными средствами меньше, чем первое пороговое значение ТН1 (этап S12: да), модуль 133 синтезирования изображения не может создать синтезированное изображение 111С, которое включает в себя заднее транспортное средство 2, без возникновения ощущения странности, даже если плоскость CS синтезирования установлена в местоположении по умолчанию. Таким образом, в этом случае блок 132 назначения плоскости синтезирования устанавливает плоскость CS синтезирования в местоположении, отличном от местоположения по умолчанию (этап S13). В частности, блок 132 назначения плоскости синтезирования устанавливает плоскость CS синтезирования в местоположении впереди местоположении по умолчанию.
[0035] Блок 132 назначения плоскости синтезирования устанавливает плоскость CS синтезирования в зависимости от расстояния L12 между транспортными средствами. А именно, блок 132 назначения плоскости синтезирования устанавливает плоскость CS синтезирования в местоположении, определенном на основе расстояния L12 между транспортными средствами. В частности, блок 132 назначения плоскости синтезирования устанавливает плоскость CS синтезирования таким образом, чтобы плоскость CS синтезирования располагалась ближе к транспортному средству 1 последовательно или ступенчато по мере сокращения расстояния L12 между транспортными средствами. Однако если модуль 133 синтезирования изображения может создать синтезированное изображение 111С, которое включает в себя заднее транспортное средство 2, без возникновения ощущения странности, даже когда местоположение плоскости CS синтезирования назначено не в зависимости от расстояния L12 между транспортными средствами, блок 132 назначения плоскости синтезирования может назначить местоположение плоскости CS синтезирования без учета расстояния L12 между транспортными средствами.
[0036] Как раскрыто выше, имеется слепая зона DSI между транспортным средством 1 и плоскостью CS синтезирования. А именно, если заднее транспортное средство 2 находится впереди плоскости CS синтезирования, существует вероятность того, что модуль 133 синтезирования изображения не сможет создать синтезированное изображение 111С, которое включает в себя заднее транспортное средство 2, без возникновения ощущения странности. Таким образом, блок 132 назначения плоскости синтезирования устанавливает плоскость CS синтезирования в местоположении впереди заднего транспортного средства 2 (это местоположение может включать в себя местоположение, в котором присутствует передний край заднего транспортного средства 2). В результате блок 132 назначения плоскости синтезирования может задать плоскость CS синтезирования таким образом, чтобы модуль 133 синтезирования изображения мог создать синтезированное изображение 111С, которое включает в себя заднее транспортное средство 2, без возникновения ощущения странности. А именно, назначение плоскости CS синтезирования в местоположении впереди заднего транспортного средства 2 практически аналогично назначению плоскости CS синтезирования в местоположении, которое позволяет модулю 133 синтезирования изображения создавать синтезированное изображение 111С, которое включает в себя заднее транспортное средство 2, без возникновения ощущения странности. Обратите внимание, что назначение плоскости CS синтезирования в местоположении впереди заднего транспортного средства 2 является также примером назначения плоскости CS синтезирования в зависимости от расстояния L12 между транспортными средствами.
[0037] После назначения плоскости CS синтезирования на этапе S13 или этапе S14 блок 132 назначения плоскости синтезирования завершает процедуру назначения плоскости синтезирования, показанную на ФИГ. 7. Затем по истечении заранее заданного промежутка времени блок 132 назначения плоскости синтезирования снова начинает процедуру назначения плоскости синтезирования, показанную на ФИГ. 7. А именно, процедура назначения плоскости синтезирования, показанная на ФИГ. 7, выполняется несколько раз с заранее заданным периодом времени.
[0038]
В вышеупомянутом раскрытии, если определено, что расстояние L12 между транспортными средствами равно первому пороговому значению ТН1 в результате определения на этапе S12, блок 132 назначения плоскости синтезирования выполняет процесс в том случае, если было определено, что расстояние L12 между транспортными средствами больше, чем первое пороговое значение ТН1. Однако если было определено, что расстояние L12 между транспортными средствами равно первому пороговому значению ТН1, блок 132 назначения плоскости синтезирования может выполнить процесс, который выполняется в случае, когда было определено, что расстояние L12 между транспортными средствами меньше, чем первое пороговое значение ТН1.
[0039] 4. Технический результат
Как раскрыто выше, в настоящем примере осуществления изобретения местоположение плоскости CS синтезирования можно изменять. Таким образом, модуль 133 синтезирования изображения может создать синтезированное изображение 111С, которое включает в себя заднее транспортное средство 2, без возникновения ощущения странности на основе плоскости CS синтезирования, заданной с изменяющемся местоположением. А именно, модуль 133 синтезирования изображения может создать синтезированное изображение 111С, которое включает в себя заднее транспортное средство 2, без возникновения ощущения странности, даже при наличии заднего транспортного средства 2.
[0040] В частности, например, ФИГ. 8А является видом сверху, на котором показано местоположение плоскости CS синтезирования и взаимное расположение заднего транспортного средства 2 и слепой зоны DSI, создаваемой, когда расстояние L12 между транспортными средствами больше первого порогового значения ТН1. В этом случае блок 132 назначения плоскости синтезирования назначает плоскость CS синтезирования в местоположении по умолчанию, как раскрыто выше. Даже когда плоскость CS синтезирования установлена в местоположении по умолчанию, заднее транспортное средство 2 отсутствует в слепой зоне DSI, пока расстояние L12 между транспортными средствами больше первого порогового значения ТН1. Таким образом, как показано на ФИГ. 8В, модуль 133 синтезирования изображения может создать синтезированное изображение 111С, которое включает в себя заднее транспортное средство 2, без возникновения ощущения странности.
[0041] С другой стороны, ФИГ. 9А является видом сверху, на котором показано местоположение плоскости синтезирования и взаимное расположение заднего транспортного средства 2 и слепой зоны DSI, создаваемой, когда расстояние между транспортным средством и задним транспортным средством L12 оказывается меньше первого пороговое значения ТН1. В этом случае, если плоскость CS синтезирования установлена в местоположении по умолчанию, заднее транспортное средство 2 присутствует в слепой зоне DSI (см. ФИГ. 6С). Таким образом, в этом случае блок 132 назначения плоскости синтезирования назначает местоположение плоскости CS синтезирования впереди местоположения по умолчанию (в особенности, местоположение, находящееся впереди местоположения заднего транспортного средства 2 или в местоположении самого заднего транспортного средства 2), как раскрыто выше. В результате, даже когда расстояние между транспортными средствами L12 меньше, чем первое пороговое значение ТН1, заднее транспортное средство 2 отсутствует в слепой зоне DSI. Таким образом, как показано на ФИГ. 9В, модуль 133 синтезирования изображения может создать синтезированное изображение 111С, которое включает в себя заднее транспортное средство 2, без возникновения ощущения странности.
[0042] 5. Модифицированный пример
Ниже описаны модифицированные примеры.
[0043] 5-1. Модифицированный пример процедуры назначения плоскости синтезирования
Во-первых, со ссылкой на ФИГ. 10 раскрыт модифицированный пример процедуры назначения плоскости синтезирования. ФИГ. 10 представляет собой блок-схему, иллюстрирующую модифицированный пример процедуры назначения плоскости синтезирования. Обратите внимание, что подробное описание процесса, аналогичного процессу, показанному на блок-схеме ФИГ. 7, опущено с присвоением такого же номера этапа этому процессу.
[0044] Как показано на ФИГ. 10, блок 132 назначения плоскости синтезирования определяет, присутствует ли заднее транспортное средство 2 также в модифицированном примере (этап S11). Если было определено, что заднее транспортное средство 2 отсутствует (этап S11: нет), блок 132 назначения плоскости синтезирования назначает плоскость CS синтезирования в местоположении по умолчанию (этап S14). Если было определено, что заднее транспортное средство 2 присутствует (этап S11: да), блок 132 назначения плоскости синтезирования определяет, является ли расстояние L12 между транспортными средствами меньше первого порогового значения ТН1 (этап S12). Если было определено, что расстояние L12 между транспортными средствами больше первого порогового значения ТН1 (этап S12: нет), блок 132 назначения плоскости синтезирования назначает плоскость CS синтезирования в местоположении по умолчанию (этап S14).
[0045] С другой стороны, если было определено, что расстояние L12 между транспортными средствами меньше первого порогового значения ТН1 (этап S12: да), блок 132 назначения плоскости синтезирования далее определяет, меньше ли расстояние между транспортными средствами, L12, чем заранее заданное второе пороговое значение ТН2, которое меньше первого порогового значения ТН1 (этап S21).
[0046] Второе пороговое значение ТН2 назначается равным соответствующему значению, при котором ситуация, когда модуль 133 синтезирования изображения может создать синтезированное изображение 111С, включающее в себя заднее транспортное средство 2, без возникновения ощущения странности, если положение плоскости CS синтезирования изменилось, может отличаться от ситуации, когда модуль 133 синтезирования изображения не может создать синтезированное изображение 111С, включающее в себя заднее транспортное средство 2, без возникновения ощущения странности, даже если положение плоскости CS синтезирования изменилось (а именно, даже если плоскость CS синтезирования приближается к транспортному средству 1) на основе расстояния L12 между транспортными средствами. Здесь со ссылкой на ФИГ. 11 будет описана ситуация, когда модуль 133 синтезирования изображения не может создать синтезированное изображение 111С, включающее в себя заднее транспортное средство 2, без возникновения ощущения странности, даже если местоположение плоскости CS синтезирования изменилось. Как показано на ФИГ. 11, когда заднее транспортное средство 2 приближается к транспортному средству 1, существует вероятность того, что заднее транспортное средство 2 находится впереди края PBL области пересечения, где диапазон IRBL изображения камеры 11BL заднего левого вида пересекается с диапазоном IRB изображения камеры 11В заднего вида, и края PBR области пересечения, где диапазон IRBR изображения камеры 11BR заднего правого вида пересекается с диапазоном IRB изображения камеры 11В заднего вида. В этом случае существует вероятность того, что заднее транспортное средство 2 находится в слепой зоне DCS, которая не входит в диапазон IRB изображения, диапазон IRBL изображения и диапазон IRBR изображения. А именно, существует вероятность того, что заднее транспортное средство 2 находится в слепой зоне DCS, которая не входит в заднее изображение 111В, заднее левое изображение 111BL и заднее правое изображение 111BR. В этом случае, по крайней мере, одна часть заднего транспортного средства 2, которое находится в слепой зоне DSC, вообще не просматривается камерой 11В заднего вида, камерой 11BL заднего левого вида и камерой 11BR заднего правого вида. Таким образом, даже если местоположение плоскости CS синтезирования изменилось (а именно, описанная выше слепая зона DSI скорректирована), модуль 133 синтезирования изображения не может создать синтезированное изображение 111С, которое включает в себя заднее транспортное средство 2, без возникновения ощущения странности.
[0047] При рассмотрении технической причины, почему модуль 133 синтезирования изображения не может создать синтезированное изображение 111С, включающее в себя заднее транспортное средство 2, без возникновения ощущения странности, даже если местоположение плоскости CS синтезирования изменяется по мере сокращения расстояния L12 между транспортными средствами, существует более высокая вероятность того, что модуль 133 синтезирования изображения не сможет создать синтезированное изображение 111С, которое включает в себя заднее транспортное средство 2, без возникновения ощущения странности, даже если местоположение плоскости CS синтезирования изменилось. Таким образом, ситуация, когда расстояние L12 между транспортными средствами меньше, чем второе пороговое значение ТН2, соответствует ситуации, когда модуль 133 синтезирования изображения не может создать синтезированное изображение 111С, которое включает в себя заднее транспортное средство 2, без возникновения ощущения странности, даже если местоположение плоскости CS синтезирования изменилось. С другой стороны, ситуация, когда расстояние L12 между транспортными средствами больше, чем второе пороговое значение ТН2, соответствует ситуации, когда модуль 133 синтезирования изображения может создать синтезированное изображение 111С, которое включает в себя заднее транспортное средство 2, без возникновения ощущения странности, если местоположение плоскости CS синтезирования изменилось. Второе расстояние L2, которое является расстоянием между транспортным средством 1 и краями PBL и PBR областей пересечения или расстоянием, которое длиннее, чем второе расстояние L2, является примером второго порогового значения ТН2, которое удовлетворяет вышеупомянутому требованию.
[0048] В результате определения на этапе S21, если было определено, что расстояние L12 между транспортными средствами больше, чем второе пороговое значение ТН2 (этап S21: нет), модуль 133 синтезирования изображения сможет создать синтезированное изображение 111С, которое включает в себя заднее транспортное средство 2, без возникновения ощущения странности, если блок 132 назначения плоскости синтезирования меняет местоположение плоскости CS синтезирования. Таким образом, в этом случае, блок 132 назначения плоскости синтезирования устанавливает плоскость CS синтезирования в местоположении, отличном от положения по умолчанию (этап S13).
[0049] С другой стороны, если в результате определения на этапе S21 было определено, что расстояние L12 между транспортными средствами меньше, чем второе пороговое значение ТН2 (этап S21: да), модуль 133 синтезирования изображения не сможет создать синтезированное изображение 111С, которое включает в себя заднее транспортное средство 2, без возникновения ощущения странности, даже если блок 132 назначения плоскости синтезирования меняет местоположение плоскости CS синтезирования. А именно, модуль 133 синтезирования изображения сможет создать только синтезированное изображение 111С, которое включает в себя заднее транспортное средство 2 неестественным или странным образом (например, синтезированное изображение 111С, в котором отсутствует, по крайней мере, одна часть заднего транспортного средства 2), даже если местоположение плоскости CS синтезирования изменилось на основе расстояния L12 между транспортными средствами. В этом случае блок 132 назначения плоскости синтезирования управляет модулем 133 синтезирования изображения для раздельного отображения на дисплее заднего изображения 111В (в качестве альтернативы, одной части заднего изображения 111В), заднего левого изображения 111BL (в качестве альтернативы, одной части заднего левого изображения 111BL) и заднего правого изображения 111BR (в качестве альтернативы, одной части заднего правого изображения 111BR), не соединяя их, вместо того, чтобы задать плоскость CS синтезирования (этап S22). В результате модуль 133 синтезирования изображения выводит на дисплей 14 заднее изображение 111В, заднее левое изображение 111BL и заднее правое изображение 111BR (в качестве альтернативы, извлекает одну часть, по крайней мере, одного из следующих изображений: заднего изображения 111В, заднего левого изображения 111BL и заднего правого изображения 111BR, - и затем выводит на дисплей 14 извлеченную часть изображения), не соединяя их. Затем дисплей 14 выводит по отдельности на дисплей заднее изображение 111В (в качестве альтернативы, одну часть заднего изображения 111В), заднее левое изображение 111BL (в качестве альтернативы, одну часть заднего левого изображения 111BL) и заднее правое изображение 111BR (в качестве альтернативы, одну часть заднего правого изображения 111BR), как показано на ФИГ. 12.
[0050] Следуя вышеупомянутому первому модифицированному примеру, можно получить технический результат, который аналогичен вышеупомянутому техническому результату. Кроме того, согласно первому модифицированному примеру, когда модуль 133 синтезирования изображения не может создать синтезированное изображение 111С, которое включает в себя заднее транспортное средство 2, без возникновения ощущения странности, даже если местоположение плоскости CS синтезирования изменилось, заднее изображение 111В (в качестве альтернативы, одна часть заднего изображения 111В), заднее левое изображение 111BL (в качестве альтернативы, одна часть заднего левого изображения 111BL) и заднее правое изображение 111BR (в качестве альтернативы, одна часть заднего правого изображения 111BR) выводятся на дисплей по отдельности в порядке исключения. Таким образом, обзор заднего транспортного средства 2 улучшается по сравнению с ситуацией, когда синтезированное изображение 111С, которое включает в себя заднее транспортное средство 2, является неестественным или выводится на дисплей странным образом.
[0051] В вышеупомянутом описании, если определено, что расстояние L12 между транспортными средствами равно второму пороговому значению ТН2 в результате определения на этапе S21, блок 132 назначения плоскости синтезирования выполняет процесс в том случае, если было определено, что расстояние L12 между транспортными средствами больше, чем второе пороговое значение ТН2. Однако если было определено, что расстояние L12 между транспортными средствами равно второму пороговому значению ТН2, блок 132 назначения плоскости синтезирования может выполнить процесс, который выполняется в случае, если было определено, что расстояние L12 между транспортными средствами меньше, чем второе пороговое значение ТН2.
[0052] 5-2. Другой модифицированный пример
В некоторых случаях размер заднего транспортного средства 2 на заднем изображении 111В достаточно сильно отличается от размера заднего транспортного средства 2 на, по крайней мере, одном изображении из заднего левого изображения 111BL и заднего правого изображения 111BR. В частности, различие между размером заднего транспортного средства 2 на заднем изображении 111В и размером заднего транспортного средства 2 на, по крайней мере, одном изображении из заднего левого изображения 111BL и заднего правого изображения 111BR больше, чем заранее заданная величина. Например, в некоторых случаях горизонтальный или вертикальный размер заднего транспортного средства 2 на заднем изображении 111В достаточно сильно отличается от горизонтального или вертикального размера заднего транспортного средства 2 на, по крайней мере, одном изображении из заднего левого изображения 111BL и заднего правого изображения 111BR. В этом случае, если создано синтезированное изображение 111С посредством синтезирования заднего изображения 111В, заднего левого изображения 111BL и заднего правого изображения 111BR, то существует вероятность того, что размер заднего транспортного средства 2 на синтезированном изображении 111С является неестественным или странным, отличным от соответствующего размера в зависимости от расстояния L12 между транспортными средствами между транспортным средством 1 и задним транспортным средством 2. Причина в следующем. Как раскрыто выше, процесс синтезирования изображения, выполняемый модулем 133 синтезирования изображения, включает в себя процесс масштабирования. Таким образом, модуль 133 синтезирования изображения должен масштабировать заднее левое изображение 111BL и заднее правое изображение 111BR, чтобы размер заднего транспортного средства 2 на синтезированном изображении 111С был равен размеру заднего транспортного средства 2 на заднем изображении 111В. В результате существует вероятность того, что размер заднего транспортного средства 2 в той части изображения, которая является одной частью синтезированного изображения 111С, и той части, которая соответствует заднему левому изображению 111BL и заднему правому изображению 111BR, значительно отличается от размера заднего транспортного средства 2 на, по крайней мере, одном изображении из заднего левого изображения 111BL и заднего правого изображения 111BR. В качестве альтернативы, модуль 133 синтезирования изображения должен масштабировать заднее изображение 111В, чтобы размер заднего транспортного средства 2 на синтезированном изображении 111BL был равен размеру заднего транспортного средства 2 на заднем левом изображении 111BR и заднем правом изображении 111BR. В результате существует вероятность того, что размер заднего транспортного средства 2 в той части изображения, которая является одной частью синтезированного изображения 111С и соответствует заднему изображению 111В, значительно отличается от размера заднего транспортного средства 2 на заднем изображении 111В. В этом случае существует вероятность того, что водитель транспортного средства 1 неправильно оценит размер заднего транспортного средства 2, когда он смотрит на синтезированное изображение 111С. В результате существует вероятность того, что водитель транспортного средства 1 неправильно оценит расстояние от транспортного средства 1 до заднего транспортного средства 2. Таким образом, во втором модифицированном примере, если размер заднего транспортного средства 2 на заднем изображении 111В отличается от размера заднего транспортного средства 2 на, по крайней мере, одном изображении из заднего левого изображения 111BL и заднего правого изображения 111BR, то блок 132 назначения плоскости синтезирования вместо назначения плоскости CS синтезирования управляет модулем 133 синтезирования изображения для раздельного вывода на дисплей заднего изображения 111В (в качестве альтернативы, одной части заднего изображения 111В), заднего левого изображения 111BL (в качестве альтернативы, одной части заднего левого изображения 111BL) и заднего правого изображения 111BR (в качестве альтернативы, одной части заднего правого изображения 111BR), не соединяя их. Обратите внимание, что этот процесс аналогичен процессу на этапе S22, показанному на ФИГ. 10 в вышеупомянутом первом модифицированном примере. В результате уменьшается или исчезает вероятность того, что водитель транспортного средства 1 неправильно поймет размер заднего транспортного средства 2 (а также расстояние до заднего транспортного средства 2).
[0053] Когда заднее транспортное средство 2 перемещается по маршруту (иными словами, по полосе движения), который находится рядом и слева от маршрута перемещения транспортного средства 1, ЭБУ 13 может управлять дисплеем 14 для выделения заднего левого изображения 111BL или 112BL более ярким, чем заднее левое изображение 111BL или 112BL, выводимое на дисплей в противном случае. Когда заднее транспортное средство 2 перемещается по маршруту, который находится рядом и справа от маршрута перемещения транспортного средства 1, ЭБУ 13 может управлять дисплеем 14 для выделения заднего правого изображения 111BR или 112BR более ярким, чем заднее правое изображение 111BR или 112BR, выводимое на дисплей в противном случае. Дисплей с выделением может быть любым дисплеем при условии, что выделенное изображение является более ярким или заметным по сравнению с невыделенным изображением. Например, Дисплей с выделением может быть дисплеем, способным окружать изображение декоративной рамкой, как показано на ФИГ. 13. Такой дисплей с выделением может соответствующим образом информировать водителя транспортного средства 1 о наличии заднего транспортного средства 2, передвигающегося по второй полосе движения, которая является местом назначения при смене полосы движения, когда водитель транспортного средства 1 намеревается сменить полосу движения транспортного средства 1 с первой полосы движения на вторую полосу движения. Кроме того, если заднее транспортное средство 2 передвигается по полосе движения, которая является той же полосой движения, по которой движется транспортное средство 1, ЭБУ 13 может дать команду дисплею 14 выделить заднее изображение 111В или 112В более ярко, чем заднее изображение 111В или 112В, выводимое на дисплей в противном случае.
[0054] 6. Дополнительные утверждения
Для вышеописанного примера осуществления изобретения будут раскрыты следующие дополнительные утверждения.
[00551 6-1. Дополнительное утверждение 1
Устройство вывода изображений на дисплей по дополнительному утверждению 1 содержит следующее оборудование: назначающее устройство, сконфигурированное для назначения в местоположении, находящемся снаружи сзади первого транспортного средства, виртуальной плоскости синтезирования, перпендикулярной продольной оси первого транспортного средства; соединяющее устройство, сконфигурированное для соединения заднего изображения и заднего бокового изображения для создания синтезированного изображения, на котором окружение, отображаемое на заднем изображении, и окружение, отображаемое на заднем боковом изображении, надлежащим образом соединены без искажений в местоположении плоскости синтезирования; при этом заднее изображение получено задним устройством формирования изображения, сконфигурированным для создания изображения заднего сектора пространства, расположенного сзади первого транспортного средства, а заднее боковое изображение получено задним боковым устройством формирования изображения, сконфигурированным для создания изображения заднего бокового сектора пространства, расположенного сбоку и сбоку от первого транспортного средства; а также устройство отображения, сконфигурированное для отображения синтезированного изображения; при этом назначающее устройство сконфигурировано так, чтобы в случае, когда устройство обнаружения определяет наличие второго транспортного средства сзади первого транспортного средств, назначать плоскость синтезирования в местоположении, отличном от местоположения, в котором плоскость синтезирования назначается в случае, когда устройство обнаружения не определяет наличие второго транспортного средства сзади первого транспортного средства.
В качестве альтернативы, устройство вывода изображений на дисплей по дополнительному утверждению 1 может быть содержать контроллер и дисплей; при этом контроллер запрограммирован для: назначения в местоположении, находящемся снаружи сзади первого транспортного средства, виртуальной плоскости синтезирования, перпендикулярной продольной оси первого транспортного средства; соединения заднего изображения и заднего бокового изображения для создания синтезированного изображения, на котором окружение, отображаемое на заднем изображении, и окружение, отображаемое на заднем боковом изображении, соединены без искажений в местоположении плоскости синтезирования; при этом заднее изображение, полученное задним формирователем изображения, сконфигурированным для создания изображения заднего сектора пространства, расположенного сзади первого транспортного средства, и заднее боковое изображение получено задним боковым формирователем изображения, сконфигурированным для создания изображения заднего бокового сектора пространства, расположенного сзади и сбоку от первого транспортного средства; при этом дисплей сконфигурирован для отображения синтезированного изображения; контроллер запрограммирован так, чтобы в случае, когда устройство обнаружения определяет наличие второго транспортного средства сзади первого транспортного средств, назначать плоскость синтезирования в местоположении, отличном от местоположения плоскости синтезирования в случае, когда устройство обнаружения не определяет наличие второго транспортного средства сзади первого транспортного средства.
[0056] В устройстве вывода изображений на дисплей согласно дополнительному утверждению 1 соединяющее устройство (в качестве альтернативы, контроллер, то же самое относится к дополнительному утверждению) создает синтезированное изображение, на котором окружение, отображаемое на заднем изображении, и окружение, отображаемое на заднем боковом изображении, соединены без искажений в местоположении плоскости синтезирования (а именно, без разрыва на границе между задним изображением и задним боковым изображением). А именно, если плоскость синтезирования назначена в местоположении, находящемся снаружи сзади первого транспортного средства на заранее заданном расстоянии, соединяющее устройство создает синтезированное изображение, на котором окружение, отображаемое на заднем изображении, в местоположении позади первого транспортного средства на заранее заданном расстоянии и окружение, отображаемое на заднем боковом изображении, в местоположении позади первого транспортного средства на заранее заданном расстоянии соединены в единое целое без искажений. В частности, в устройстве вывода изображений на дисплей согласно дополнительному утверждению 1, местоположение плоскости синтезирования, эквивалентное местоположению, где окружение, отображаемое на заднем изображении, и окружение, отображаемое на заднем боковом изображении, без искажений соединены в единое целое, изменяется в зависимости от наличия/отсутствия второго транспортного средства. Таким образом, устройство вывода изображений на дисплей согласно дополнительному утверждению 1 может изменить местоположение плоскости синтезирования (иными словами, переместить ее) таким образом, чтобы обзор второго транспортного средства был обеспечен надлежащим образом. В частности, устройство вывода изображений на дисплей согласно дополнительному утверждению 1 может изменить положение плоскости синтезирования для создания синтезированного изображения, которое включает в себя второе транспортное средство без возникновения ощущения странности (иными словами, обеспечивая хороший обзор). Поэтому устройство вывода изображений на дисплей согласно дополнительному утверждению 1 может синтезировать заднее изображение и заднее боковое изображение таким образом, чтобы обзор второго транспортного средства был обеспечен на синтезированном изображении, когда второе транспортное средство присутствует сзади первого транспортного средства, по сравнению с устройством вывода изображений на дисплей в сравнительном примере, в котором местоположение плоскости синтезирования зафиксировано (т.е. не изменяется) независимо от присутствия или отсутствия второго транспортного средства.
[0057] 6-2. Дополнительное утверждение 2 Устройство вывода изображений на дисплей согласно дополнительному утверждению 2 является устройством вывода изображений на дисплей согласно дополнительному утверждению 1, при этом назначающее устройство сконфигурировано так, чтобы в случае, когда устройство обнаружения обнаруживает, что сзади первого транспортного средства имеется второе транспортное средство, назначать плоскость синтезирования в местоположении, смещенном в сторону первого транспортного средства от местоположения плоскости синтезирования в случае, когда устройство обнаружения не обнаруживает наличие второго транспортного средства сзади первого транспортного средства.
В качестве альтернативы, устройство вывода изображений на дисплей согласно дополнительному утверждению 2 может являться устройством вывода изображений на дисплей согласно дополнительному утверждению 1, в котором контроллер запрограммирован так, чтобы в случае, когда устройство обнаружения обнаруживает, что сзади первого транспортного средства имеется второе транспортное средство, назначать плоскость синтезирования в местоположении, смещенном в сторону первого транспортного средства от местоположения плоскости синтезирования в случае, когда устройство обнаружения не обнаруживает наличие второго транспортного средства сзади первого транспортного средства.
[0058] Устройство вывода изображений на дисплей согласно дополнительному утверждению 2 может изменить местоположение плоскости синтезирования для создания синтезированного изображения, которое включает в себя второе транспортное средство без возникновения ощущения странности.
[0059] 6-3. Дополнительное утверждение 3
Устройство вывода изображений на дисплей согласно дополнительному утверждению 3 является устройством вывода изображений на дисплей согласно дополнительному утверждению 1 или 2, причем назначающее устройство сконфигурировано для изменения местоположения плоскости синтезирования в зависимости от расстояния между первым транспортным средством и вторым транспортным средством, если устройство обнаружения обнаруживает, что сзади первого транспортного средства имеется второе транспортное средство.
В качестве альтернативы, устройство вывода изображений на дисплей согласно дополнительному утверждению 3 может являться устройством вывода изображений на дисплей согласно дополнительному утверждению 1 или 2, причем контроллер запрограммирован для изменения местоположения плоскости синтезирования в зависимости от расстояния между первым транспортным средством и вторым транспортным средством, если устройство обнаружения обнаруживает, что сзади первого транспортного средства имеется второе транспортное средство. [0060] Устройство вывода изображений на дисплей согласно дополнительному утверждению 3 может изменить местоположение плоскости синтезирования в зависимости от расстояния между первым транспортным средством и вторым транспортным средством для создания синтезированного изображения, которое включает в себя второе транспортное средство без возникновения ощущения странности.
[0061] 6-4. Дополнительное утверждение 4
Устройство вывода изображений на дисплей согласно дополнительному утверждению 4 является устройством вывода изображений на дисплей согласно дополнительному утверждению 3, причем назначающее устройство сконфигурировано для назначения плоскости синтезирования в местоположении, которое тем ближе к первому транспортному средству, чем меньше расстояние.
В качестве альтернативы, устройство вывода изображений на дисплей согласно дополнительному утверждению 4 может являться устройством вывода изображений на дисплей согласно дополнительному утверждению 3, причем контроллер запрограммирован для назначения плоскости синтезирования в местоположении, которое тем ближе к первому транспортному средству, чем меньше расстояние.
[0062] Устройство вывода изображений на дисплей согласно дополнительному утверждению 4 может изменять местоположение плоскости синтезирования в зависимости от расстояния между первым транспортным средством и вторым транспортным средством для создания синтезированного изображения, которое включает в себя второе транспортное средство без возникновения ощущения странности.
[0063] 6-5. Дополнительное утверждение 5
Устройство вывода изображений на дисплей согласно дополнительному утверждению 5 является устройством вывода изображений на дисплей согласно любому из дополнительных утверждений 1-4, причем назначающее устройство сконфигурировано для назначения плоскости синтезирования в местоположении позади первого транспортного средства и впереди второго транспортного средства, если устройство обнаружения определяет, что сзади первого транспортного средства имеется второе транспортное средство.
Также устройство вывода изображений на дисплей согласно дополнительному утверждению 5 может быть устройством вывода изображений на дисплей согласно любому из дополнительных утверждений 1-4, причем контроллер запрограммирован для назначения плоскости синтезирования в местоположении позади первого транспортного средства и впереди второго транспортного средства, если устройство обнаружения определяет, что сзади первого транспортного средства имеется второе транспортное средство.
[0064] Устройство вывода изображений на дисплей согласно дополнительному утверждению 5 может изменить местоположение плоскости синтезирования для создания синтезированного изображения, которое включает в себя второе транспортное средство без возникновения ощущения странности (например, которое полностью включает в себя второе транспортное средство целиком, без неестественного отсутствия частей).
[0065] 6-6. Дополнительное утверждение 6
Устройство вывода изображений на дисплей согласно дополнительному утверждению 6 является устройством вывода изображений на дисплей согласно любому из дополнительных утверждений 1-5, причем назначающее устройство сконфигурировано для назначения плоскости синтезирования таким образом, чтобы второе транспортное средство было включено в синтезированное изображение без искажений, если устройство обнаружения определяет, что сзади первого транспортного средства имеется второе транспортное средство.
Также устройство вывода изображений на дисплей согласно дополнительному утверждению 6 может быть устройством вывода изображений на дисплей согласно любому из дополнительных утверждений 1-5, причем контроллер запрограммирован для назначения плоскости синтезирования таким образом, чтобы второе транспортное средство было включено в синтезированное изображение без искажений, если устройство обнаружения определяет, что сзади первого транспортного средства имеется второе транспортное средство.
[0066] Устройство вывода изображений на дисплей согласно дополнительному утверждению 6 может изменять местоположение плоскости синтезирования для создания синтезированного изображения, которое включает в себя второе транспортное средство без возникновения ощущения странности.
[0067] 6-7. Дополнительное утверждение 7
Устройство вывода изображений на дисплей согласно дополнительному утверждению 7 является устройством вывода изображений на дисплей согласно любому из дополнительных утверждений 1-6, причем устройство отображения сконфигурировано для вывода на дисплей заднего изображения и заднего бокового изображения по отдельности вместо вывода на дисплей синтезированного изображения, если расстояние между первым транспортным средством и вторым транспортным средством меньше, чем заранее заданное пороговое значение.
Также устройство вывода изображений на дисплей согласно дополнительному утверждению 7 может быть устройством вывода изображений на дисплей согласно любому из дополнительных утверждений 1-6, причем дисплей сконфигурирован для вывода на дисплей заднего изображения и заднего бокового изображения по отдельности вместо вывода на дисплей синтезированного изображения, если расстояние между первым транспортным средством и вторым транспортным средством меньше, чем заранее заданное пороговое значение.
[0068] Если расстояние между первым транспортным средством и вторым транспортным средством меньше, чем заранее заданное пороговое значение (а именно, второе транспортное средство находится очень близко к первому транспортному средству), существует вероятность того, что устройство вывода изображений на дисплей не сможет создать синтезированное изображение, которое включает в себя второе транспортное средство без возникновения ощущения странности, только изменяя местоположение плоскости синтезирования, как раскрыто выше с использованием чертежа. В этом случае устройство вывода изображений на дисплей согласно дополнительному утверждению 7 выводит на дисплей заднее изображение и заднее боковое изображение по отдельности. Таким образом, обзор второго транспортного средства обеспечен более надлежащим образом по сравнению со случаем, когда синтезированное изображение, включающее неестественное изображение второго транспортного средства (например, синтезированное изображение, включающее второе транспортное средство, одна часть которого отсутствует неестественным образом) продолжает отображаться на дисплее.
[0069] Обратите внимание, что заранее заданное пороговое значение может быть равно или больше расстояния от первого транспортного средства до местоположения, в котором диапазон изображения заднего устройства формирования изображения (в качестве альтернативы, заднего формирователя изображения, то же самое относится к дополнительному утверждению) и диапазон изображения заднего бокового устройства формирования изображения (в качестве альтернативы, заднего бокового формирователя изображения, то же самое относится к дополнительному утверждению) пересекаются друг с другом. Кроме того, если устройство отображения (в качестве альтернативы, дисплей, то же самое относится к дополнительному утверждению), выводит на дисплей заднее изображение и заднее боковое изображение по отдельности, соединяющее устройство не обязательно создает синтезированное изображение.
[0070] 6-8. Дополнительное утверждение 8
Устройство вывода изображений на дисплей согласно дополнительному утверждению 8 является устройством вывода изображений на дисплей согласно любому из дополнительных утверждений 1-7, причем устройство отображения сконфигурировано для вывода на дисплей заднего изображения и заднего бокового изображения по отдельности вместо вывода на дисплей синтезированного изображения, если различие между размером второго транспортного средства на заднем изображении и размером второго транспортного средства на заднем боковом изображении больше заранее заданной величины.
В качестве альтернативы, устройство вывода изображений на дисплей согласно дополнительному утверждению 8 может являться устройством вывода изображений на дисплей согласно любому из дополнительных утверждений 1-7, причем дисплей сконфигурирован для вывода на дисплей заднего изображения и заднего бокового изображения по отдельности вместо вывода на дисплей синтезированного изображения, если различие между размером второго транспортного средства на заднем изображении и размером второго транспортного средства на заднем боковом изображении больше заранее заданной величины.
[0071] Если различие между размером второго транспортного средства на заднем изображении и размером второго транспортного средства на заднем боковом изображении больше заранее заданной величины (т.е. относительно велико), существует вероятность того, что размер второго транспортного средства на синтезированном изображении, полученном при соединении заднего изображения и заднего бокового изображения, является странным (т.е. размер, который вызывает ощущение странности), отличающимся от соответствующего размера в зависимости от расстояния между первым транспортным средством и вторым транспортным средством. В этом случае существует вероятность того, что водитель первого транспортного средства неправильно поймет размер второго транспортного средства, и в результате неправильно поймет расстояние до второго транспортного средства. Устройство вывода изображений на дисплей согласно дополнительному утверждению 8 выводит на дисплей заднее изображение и заднее боковое изображение по отдельности вместо вывода на дисплей синтезированного изображения, если различие между размером второго транспортного средства на заднем изображении и размером второго транспортного средства на заднем боковом изображении больше заранее заданной величины. Таким образом, вероятность того, что водитель первого транспортного средства неправильно поймет размер второго транспортного средства (а также расстояние до второго транспортного средства), более низка или отсутствует.
[00721 6-9. Дополнительное утверждение 9
Устройство вывода изображений на дисплей согласно дополнительному утверждению 9 является устройством вывода изображений на дисплей согласно любому из дополнительных утверждений 1-8, причем заднее боковое устройство формирования изображения сконфигурировано для создания изображения заднего бокового сектора пространства, расположенного сзади и справа или слева от первого транспортного средства; устройство отображения
сконфигурировано для более сильного выделения части изображения синтезированного изображения, которая соответствует заднему боковому изображению, если второе транспортное средство перемещается по второй полосе движения, находящейся справа или слева от первой полосы движения, по которой перемещается первое транспортное средство, по сравнению со случаем, когда второе транспортное средство перемещается по первой полосе движения.
В качестве альтернативы, устройство вывода изображений на дисплей согласно дополнительному отчету 9 может являться устройством вывода изображений на дисплей согласно любому из дополнительных утверждений 1-8, причем задний боковой формирователь изображения сконфигурирован для создания изображения заднего бокового сектора пространства, расположенного сзади и справа или слева от первого транспортного средства; дисплей сконфигурирован для более сильного выделения части изображения синтезированного изображения, которая соответствует заднему боковому изображению, если второе транспортное средство перемещается по второй полосе движения, находящейся справа или слева от первой полосы движения, по которой перемещается первое транспортное средство, по сравнению со случаем, когда второе транспортное средство перемещается по первой полосе движения.
[0073] Устройство вывода изображений на дисплей согласно дополнительному утверждению 9 может информировать водителя первого транспортного средства о присутствии второго транспортного средства, двигающегося по второй полосе движения, которая является местом назначения при изменении полосы движения, если водитель первого транспортного средства намеревается изменить полосу движения первого транспортного средства с первой на вторую.
[0074] По крайней мере, одну часть признаков вышеупомянутого примера осуществления изобретения и модифицированного примера можно исключить или изменить соответствующим образом. По крайней мере, один признак вышеописанного примера осуществления изобретения и модифицированного примера можно сочетать с другим признаком вышеописанного примера осуществления изобретения и модифицированного примера.
[0075] Настоящее приложение основано и испрашивает преимущества приоритета предшествующей японской Заявки на патент №2017-233733, поданной 5 декабря 2017 г., все содержание которой включено в настоящий документ посредством ссылки. Кроме того, все содержание раскрытых выше Патентных документов 1-2 включено в настоящий документ посредством ссылки.
[0076] Все примеры и условные формулировки, изложенные в настоящем документе, используются в целях объяснения, чтобы помочь читателю понять суть изобретения и концепции, внесенные изобретателем для продвижения уровня техники, и должны толковаться без ограничения как являющиеся таковыми, в частности, в раскрытых примерах и условиях; организация таких примеров в спецификации не относится к указанию на превосходство и неполноценность изобретения. Несмотря на то, что пример осуществления изобретения согласно данному изобретению был подробно раскрыт, следует понимать, что в настоящий документ могут быть внесены различные изменения, замены и исправления без отступления от существа и объема настоящего изобретения. Устройства вывода изображений на дисплей с такими изменениями также должны соответствовать техническому объему данного изобретения.
[0077] Перечень ссылочных позиций
1 транспортное средство
11В камера заднего вида
11BL камера заднего левого вида
11BR камера заднего правого вида
12 датчик заднего транспортного средства
13 ЭБУ
131 модуль сбора изображений
132 блок назначения плоскости синтезирования
133 модуль синтезирования изображения
14 дисплей
111В, 112В заднее изображение
111BL, 112BL заднее левое изображение
111BR, 112BR заднее правое изображение
111С синтезированное изображение
2 заднее транспортное средство
CS плоскость синтезирования
IRB, IRBL, IRBR, IRB', IRBL', IRBR' диапазоны изображения
SB, SBL, SBR зона перекрытия
PBL, PBR края областей пересечения
DSI, DSC слепая зона.
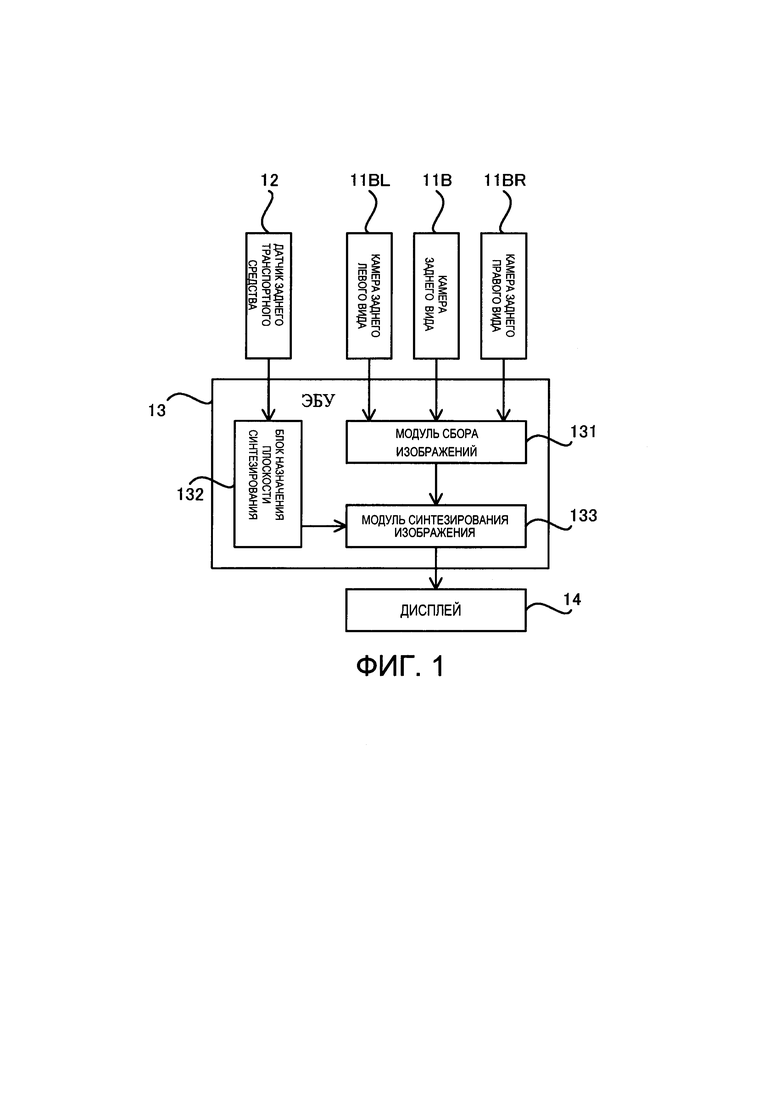
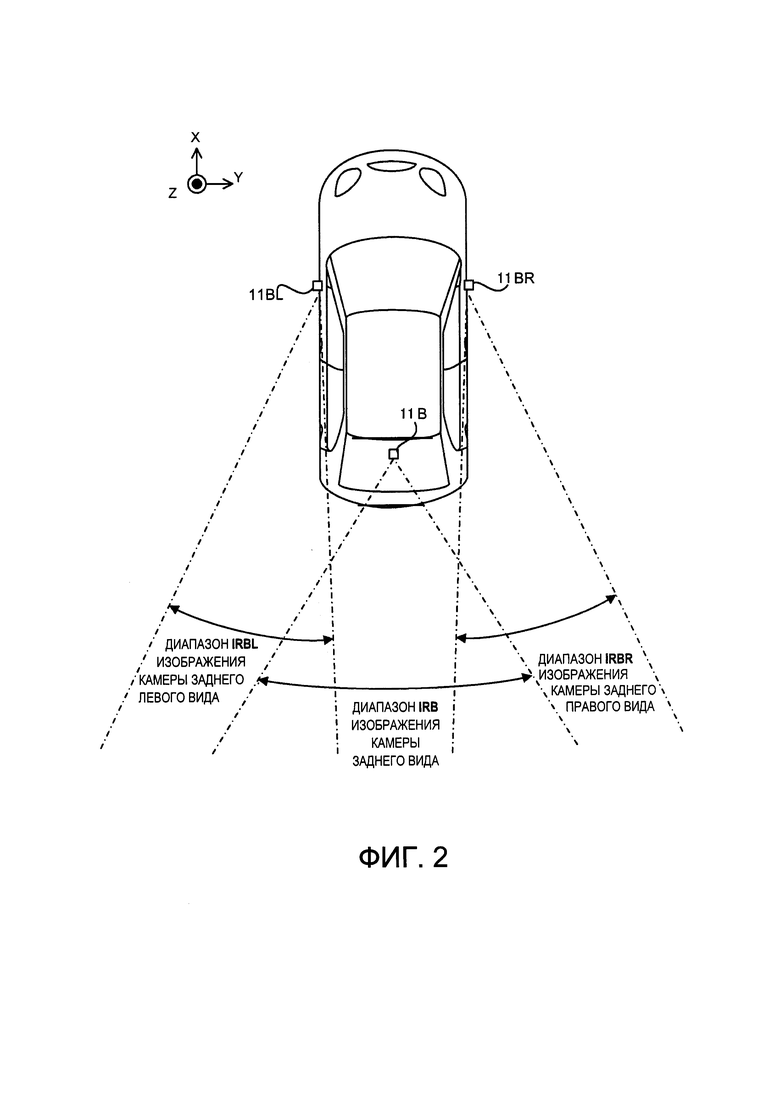
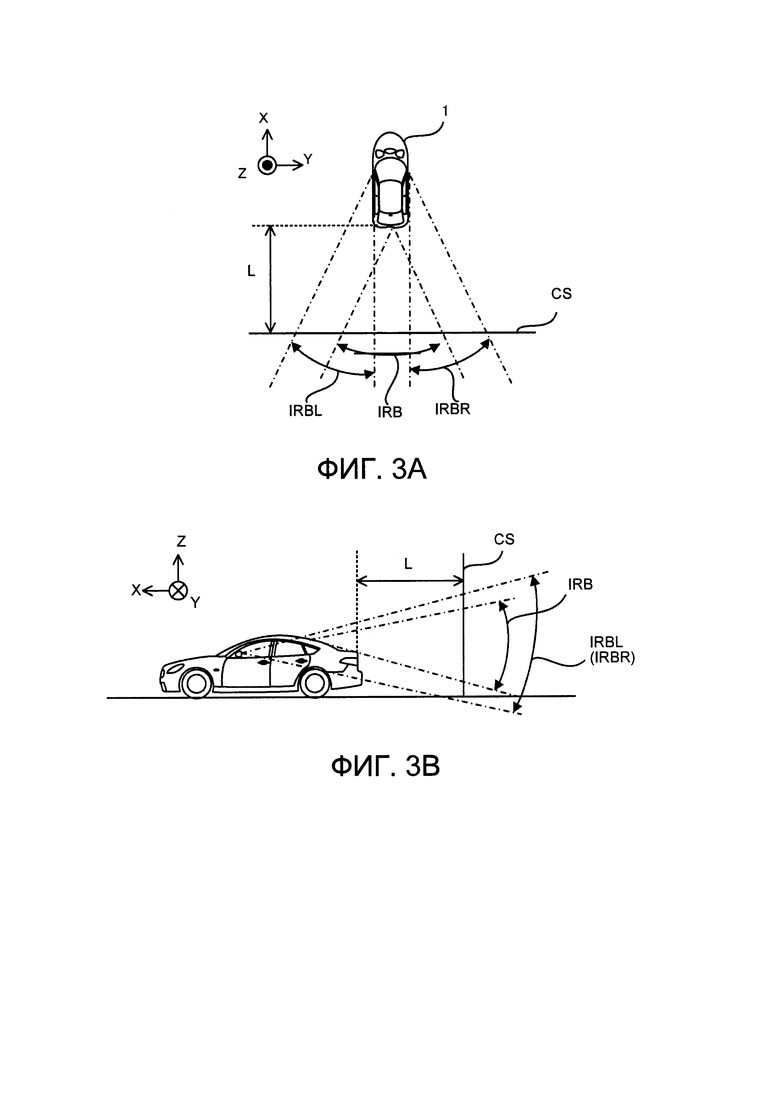
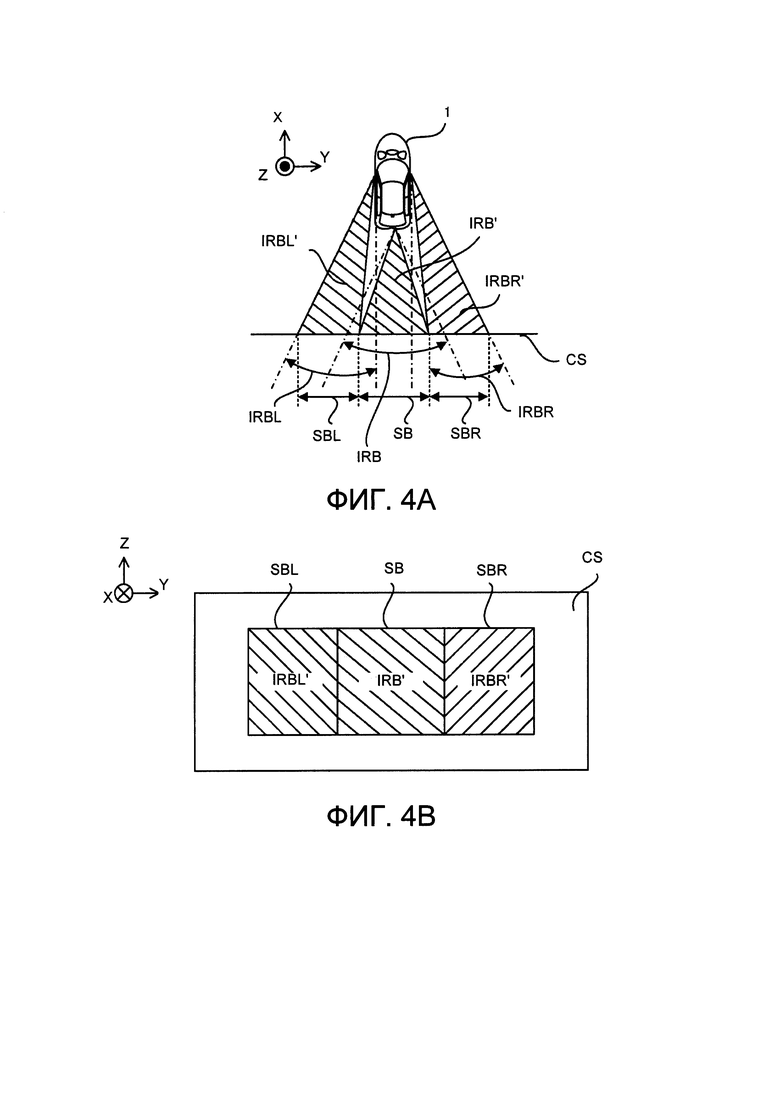
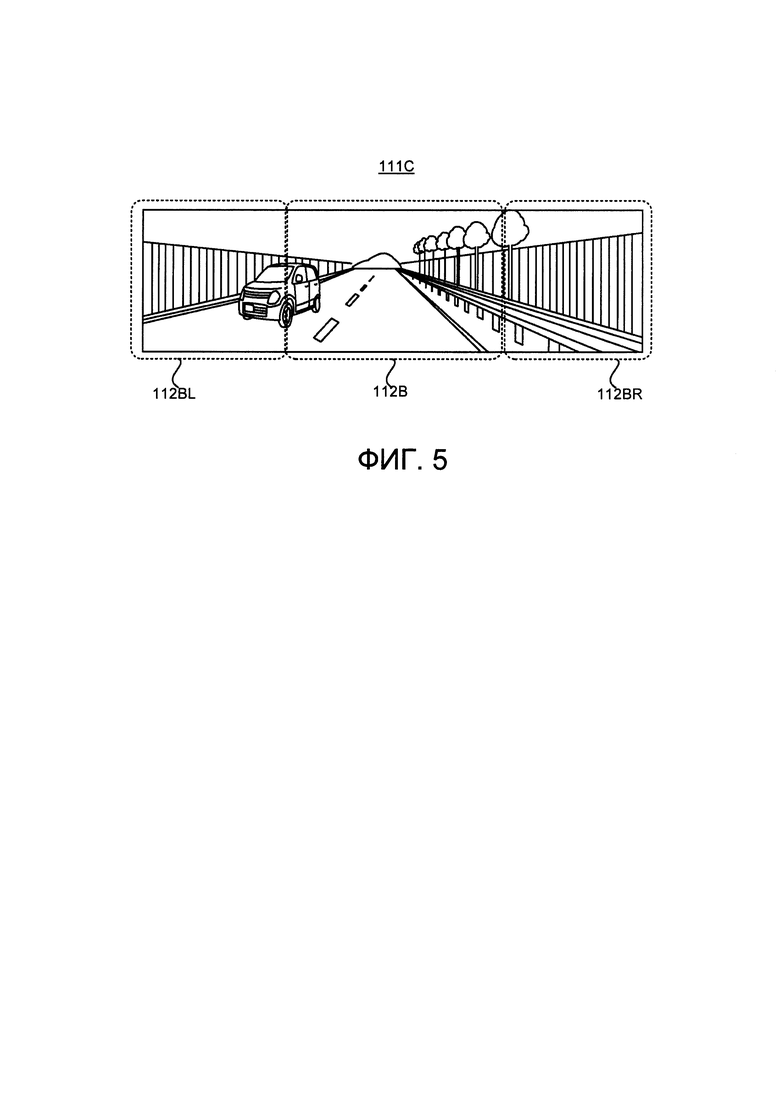
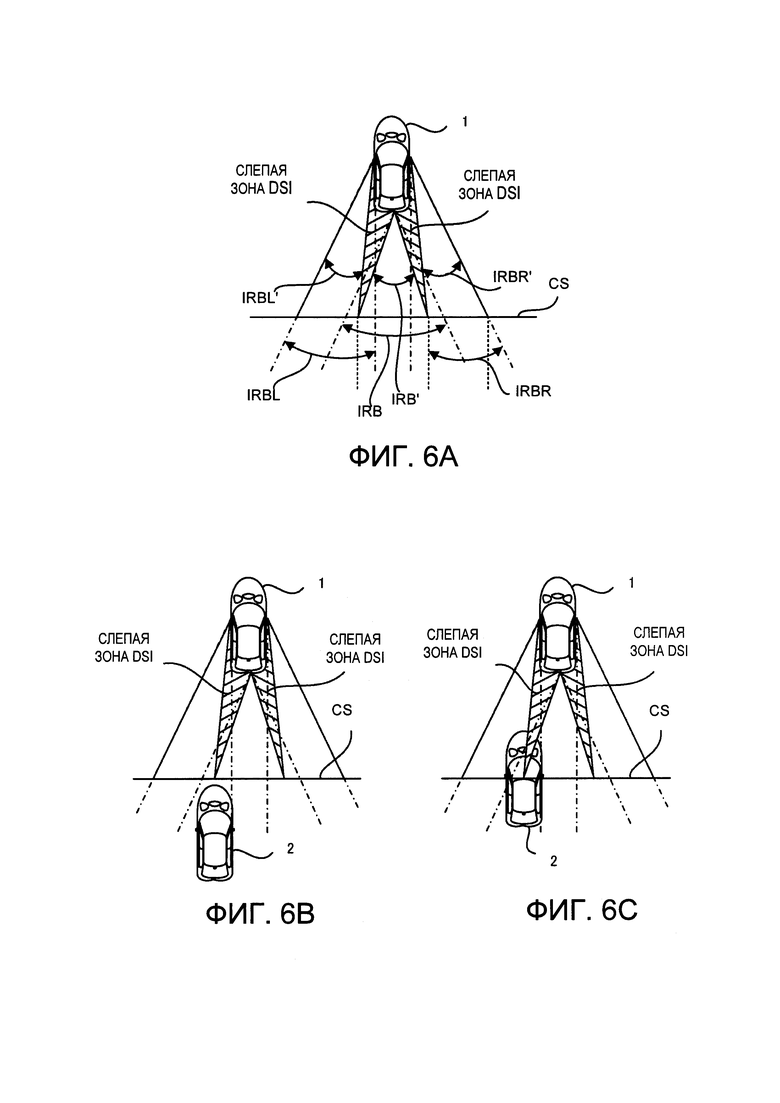
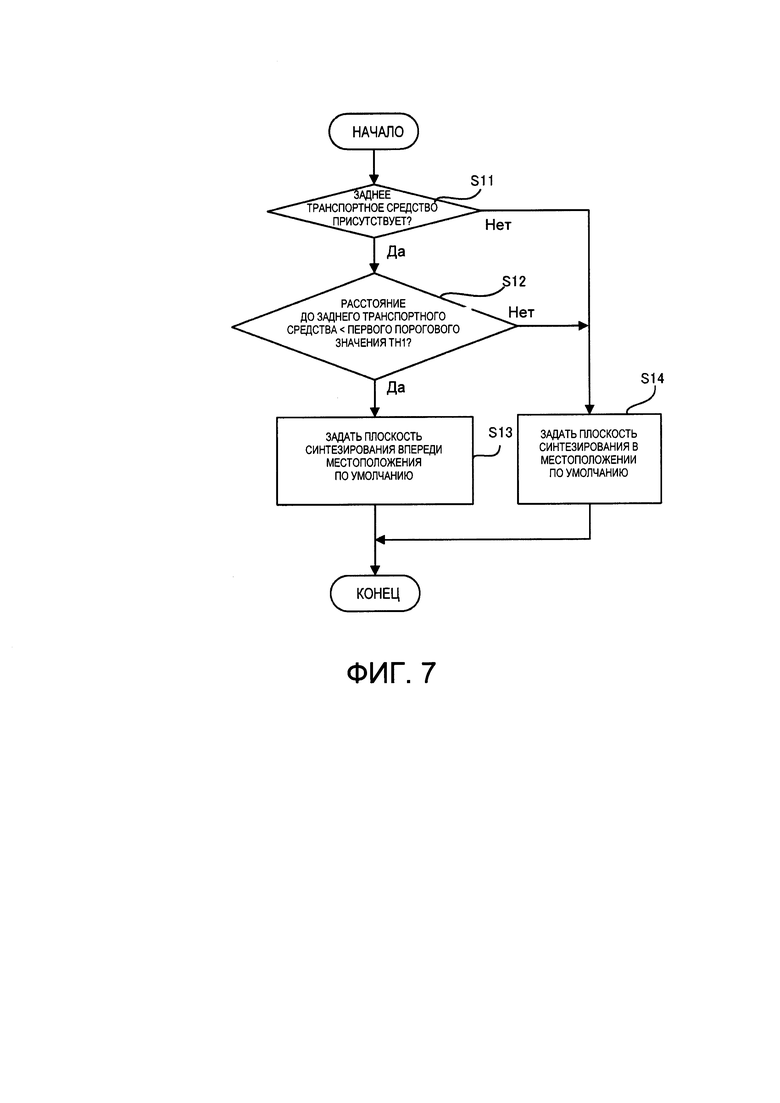
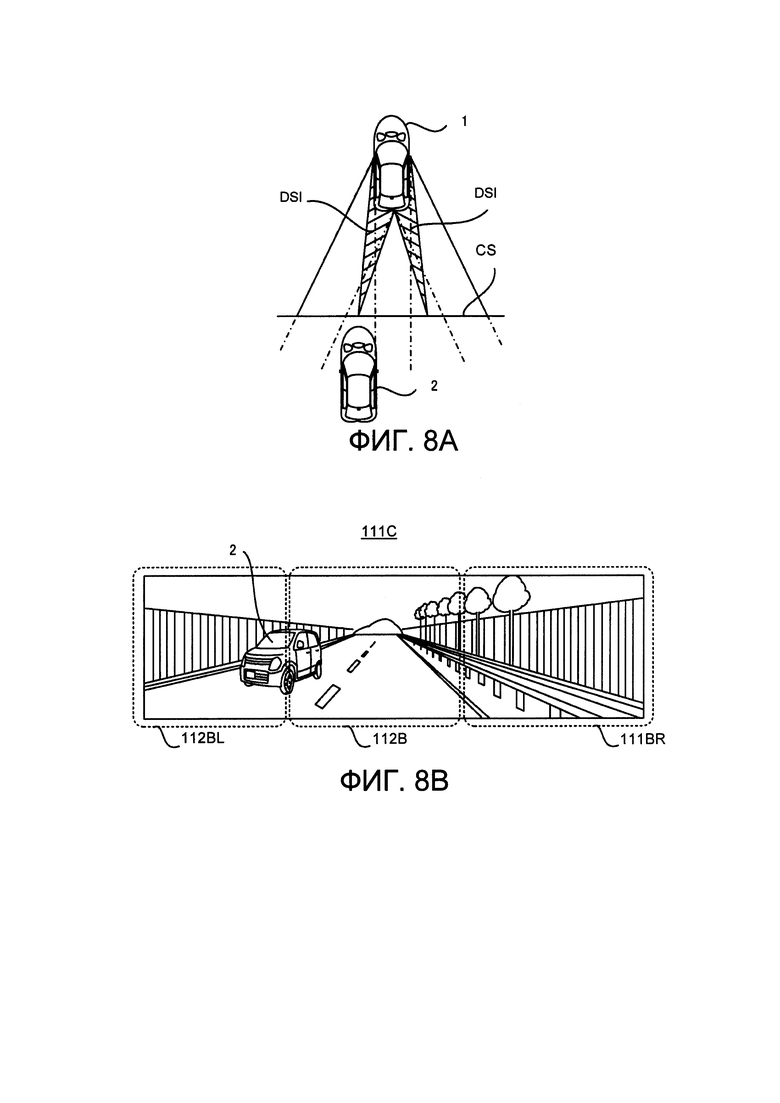
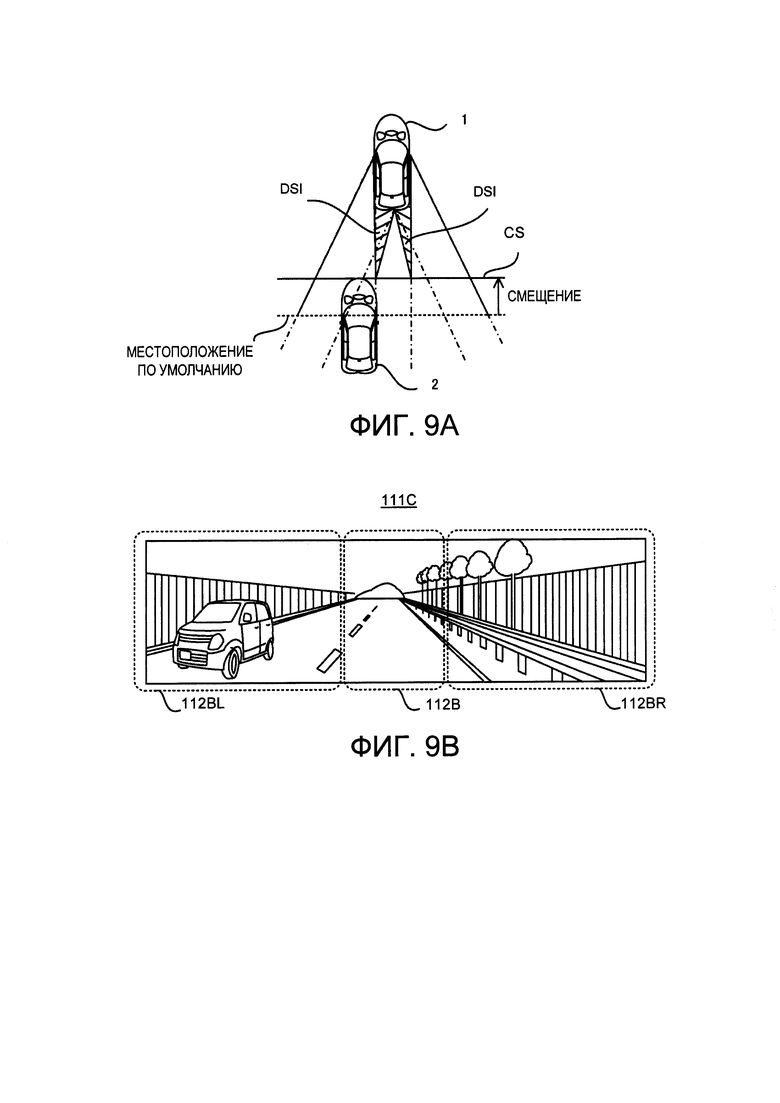
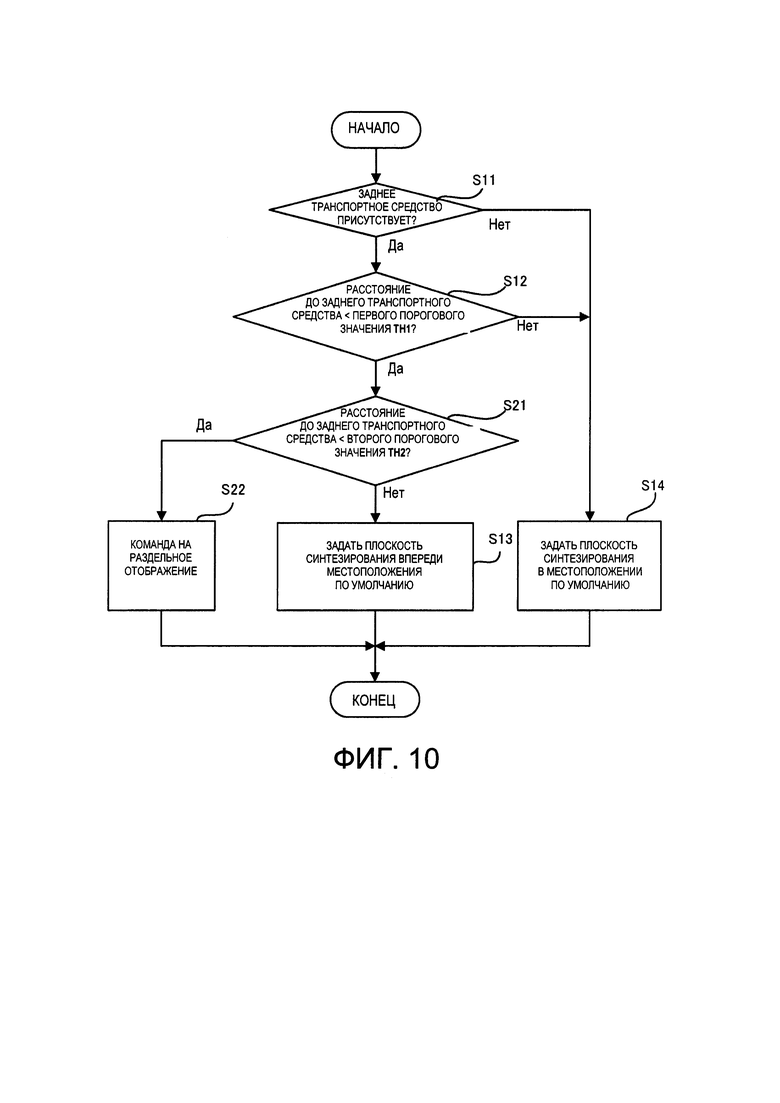
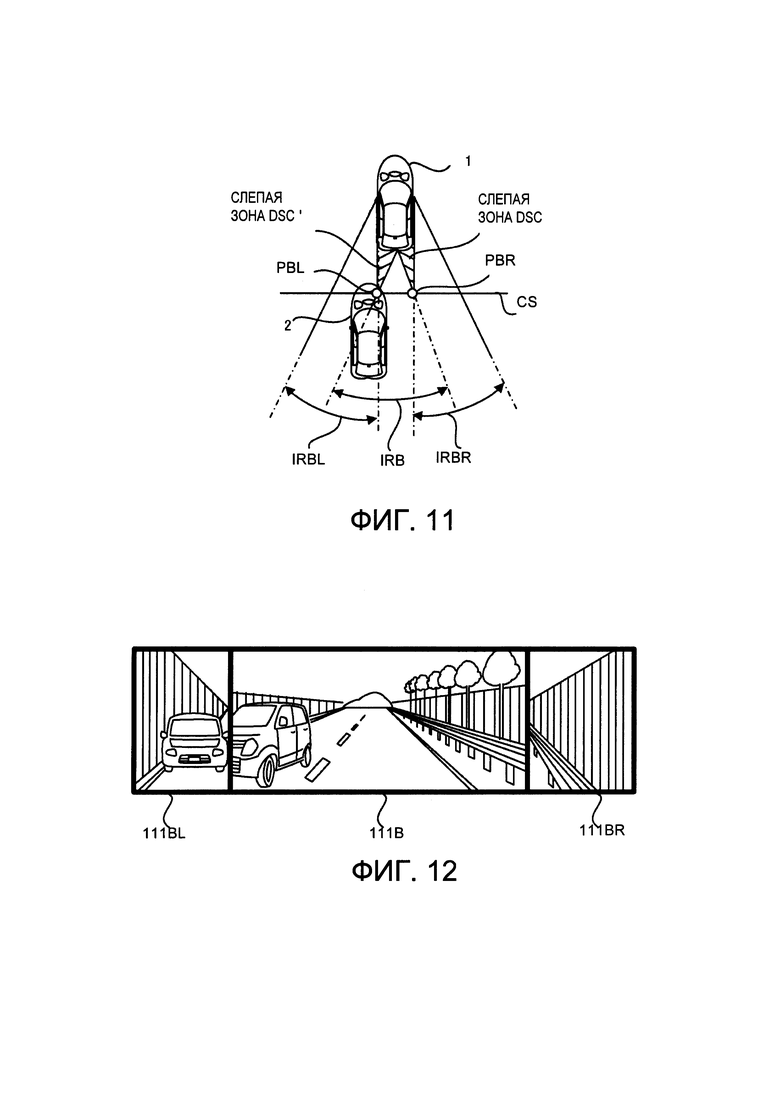
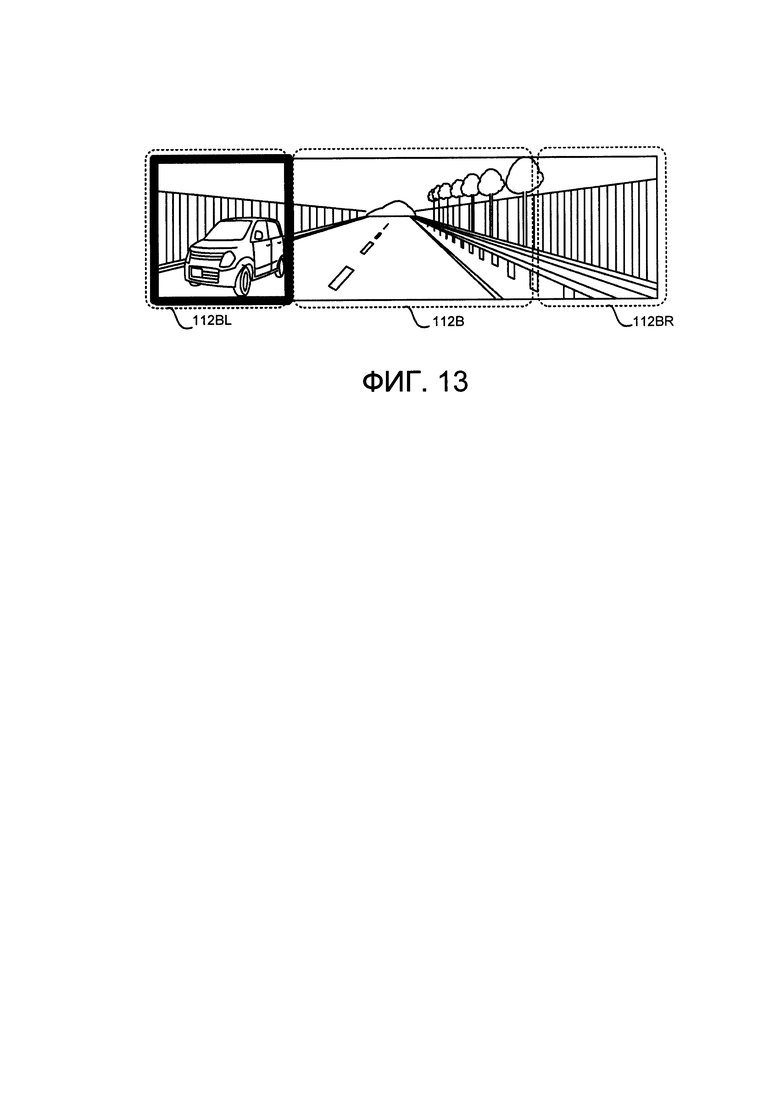
Устройство вывода изображений на дисплей содержит назначающее устройство (132) для назначения плоскости (CS) синтезирования в местоположении снаружи сзади первого транспортного средства; соединяющее устройство (133) для соединения заднего изображения (111В), полученного задним устройством (11В) формирования изображения для изображения заднего сектора первого транспортного средства, и заднего бокового изображения (111BL, 111BR), полученного устройством (11В) формирования изображения для изображения заднего бокового сектора первого транспортного средства, чтобы создать синтезированное изображение (111С), на котором окружение, отображаемое на заднем изображении, и окружение, отображаемое на заднем боковом изображении, соединены без искажений в местоположении плоскости синтезирования, при этом при наличии второго транспортного средства сзади первого транспортного средства назначающее устройство задает плоскость синтезирования в местоположении, отличном от местоположения плоскости синтезирования в случае, если второе транспортное средство отсутствует сзади первого транспортного средства. Повышается безопасность движения. 7 з.п. ф-лы, 19 ил.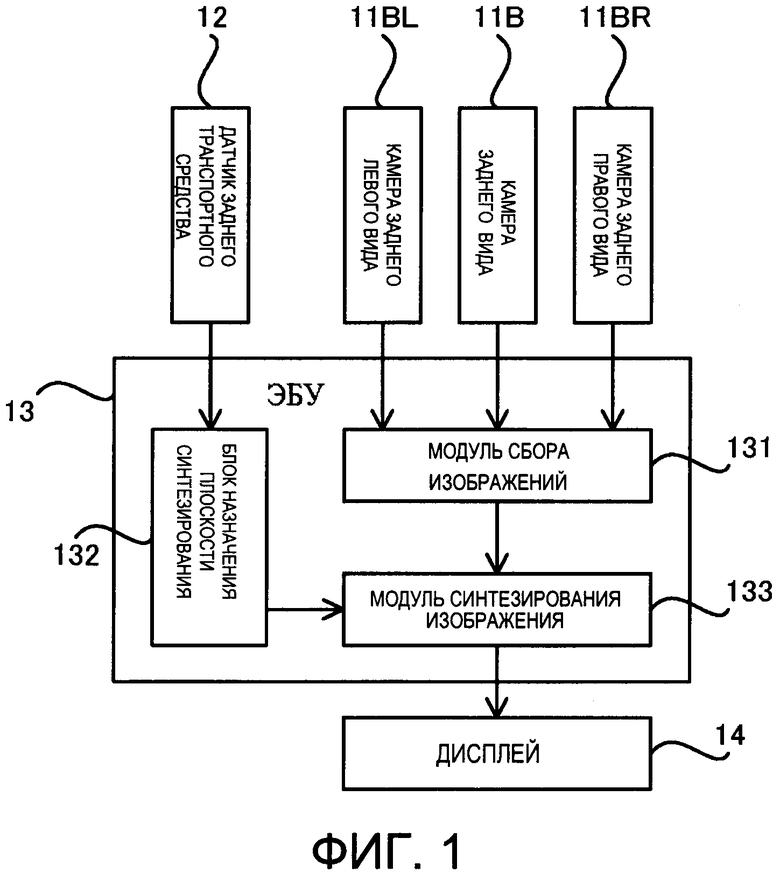
1. Устройство вывода изображений на дисплей, содержащее:
назначающее устройство, сконфигурированное для назначения в местоположении, находящемся снаружи сзади первого транспортного средства, виртуальной плоскости синтезирования, которая перпендикулярна продольной оси первого транспортного средства;
соединяющее устройство, сконфигурированное для соединения заднего изображения и заднего бокового изображения для создания синтезированного изображения, на котором окружение, отображаемое на заднем изображении, и окружение, отображаемое на заднем боковом изображении, соединены без искажений в местоположении плоскости синтезирования, при этом заднее изображение получено задним устройством формирования изображения, сконфигурированным для создания изображения заднего сектора пространства, расположенного сзади первого транспортного средства, а заднее боковое изображение получено задним боковым устройством формирования изображения, сконфигурированным для создания изображения заднего бокового сектора пространства, расположенного сзади и сбоку от первого транспортного средства; и
устройство отображения, сконфигурированное для отображения синтезированного изображения,
при этом
назначающее устройство сконфигурировано так, чтобы в случае, когда устройство обнаружения определяет наличие второго транспортного средства сзади первого транспортного средства, назначать плоскость синтезирования в местоположении, отличном от местоположения плоскости синтезирования в случае, когда устройство обнаружения не определяет наличие второго транспортного средства сзади первого транспортного средства,
устройство отображения сконфигурировано для вывода на дисплей заднего изображения и заднего бокового изображения по отдельности вместо вывода на дисплей синтезированного изображения, если расстояние между первым транспортным средством и вторым транспортным средством меньше, чем заранее заданное пороговое значение.
2. Устройство вывода изображений на дисплей по п. 1, в котором
назначающее устройство сконфигурировано так, чтобы в случае, когда устройство обнаружения определяет наличие второго транспортного средства сзади первого транспортного средства, назначать плоскость синтезирования в местоположении, смещенном в сторону первого транспортного средства от местоположения плоскости синтезирования в случае, когда устройство обнаружения не определяет наличие второго транспортного средства сзади первого транспортного средства.
3. Устройство вывода изображений на дисплей по п. 1 или 2, в котором
назначающее устройство сконфигурировано для изменения местоположения плоскости синтезирования в зависимости от расстояния между первым транспортным средством и вторым транспортным средством, если устройство обнаружения определяет наличие второго транспортного средства сзади первого транспортного средства.
4. Устройство вывода изображений на дисплей по п. 3, в котором
назначающее устройство сконфигурировано для назначения плоскости синтезирования в местоположении, которое тем ближе к первому транспортному средству, чем меньше расстояние.
5. Устройство вывода изображений на дисплей по п. 1 или 2, в котором
назначающее устройство сконфигурировано для назначения плоскости синтезирования в местоположении позади первого транспортного средства и впереди второго транспортного средства, если устройство обнаружения определяет наличие второго транспортного 3 средства сзади первого транспортного средства.
6. Устройство вывода изображений на дисплей по п. 1 или 2, в котором
назначающее устройство сконфигурировано для назначения плоскости синтезирования таким образом, чтобы второе транспортное средство был включено в синтезированное изображение без искажений, если устройство обнаружения определяет наличие второго транспортного средства сзади первого транспортного средства.
7. Устройство вывода изображений на дисплей по п. 1 или 2, в котором
устройство отображения сконфигурировано для вывода на дисплей заднего изображения и заднего бокового изображения по отдельности вместо вывода на дисплей синтезированного изображения, если различие между размером второго транспортного средства на заднем изображении и размером второго транспортного средства на заднем боковом изображении больше заранее заданной величины.
8. Устройство вывода изображений на дисплей по п. 1 или 2, в котором
заднее боковое устройство формирования изображения сконфигурировано для создания изображения заднего бокового сектора пространства, расположенного сзади и справа или сзади и слева от первого транспортного средства,
устройство отображения сконфигурировано для более сильного выделения части синтезированного изображения, которая соответствует заднему боковому изображению, если второе транспортное средство перемещается по второй полосе движения, находящейся справа или слева от первой полосы движения, по которой перемещается первое транспортное средство, по сравнению со случаем, когда второе транспортное средство перемещается по первой полосе движения.
| DE 102010038825 A1, 10.02.2011 | |||
| JP 2016189576 A, 04.11.2016 | |||
| ПЛАЗМЕННОЕ УСТРОЙСТВО | 1992 |
|
RU2045133C1 |
| УСТРОЙСТВО И СПОСОБ ОЦЕНКИ РИСКОВ АВАРИЙ ДЛЯ ДВИЖУЩЕГОСЯ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2628350C2 |

